Submitted:
27 September 2021
Posted:
28 September 2021
You are already at the latest version
Abstract
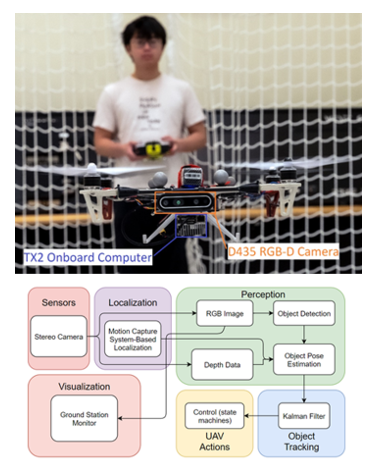
The ever-burgeoning growth of autonomous unmanned aerial vehicles (UAVs) has demonstrated a promising platform for utilization in real-world applications. In particular, UAV equipped with a vision system could be leveraged for surveillance applications. This paper proposes a learning-based UAV system for achieving autonomous surveillance, in which the UAV can be of assistance in autonomously detecting, tracking, and following a target object without human intervention. Specifically, we adopted the YOLOv4-Tiny algorithm for semantic object detection and then consolidated it with a 3D object pose estimation method and Kalman Filter to enhance the perception performance. In addition, a back-end UAV path planning for surveillance maneuver is integrated to complete the fully autonomous system. The perception module is assessed on a quadrotor UAV, while the whole system is validated through flight experiments. The experiment results verified the robustness, effectiveness, and reliability of the autonomous object tracking UAV system in performing surveillance tasks. The source code is released to the research community for future reference.
Keywords:
UAV
; Object Detection
; Object Tracking
; Deep Learning
; Kalman Filter
; Autonomous Surveillance
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



