
Submitted:
11 September 2018
Posted:
13 September 2018
You are already at the latest version
Abstract
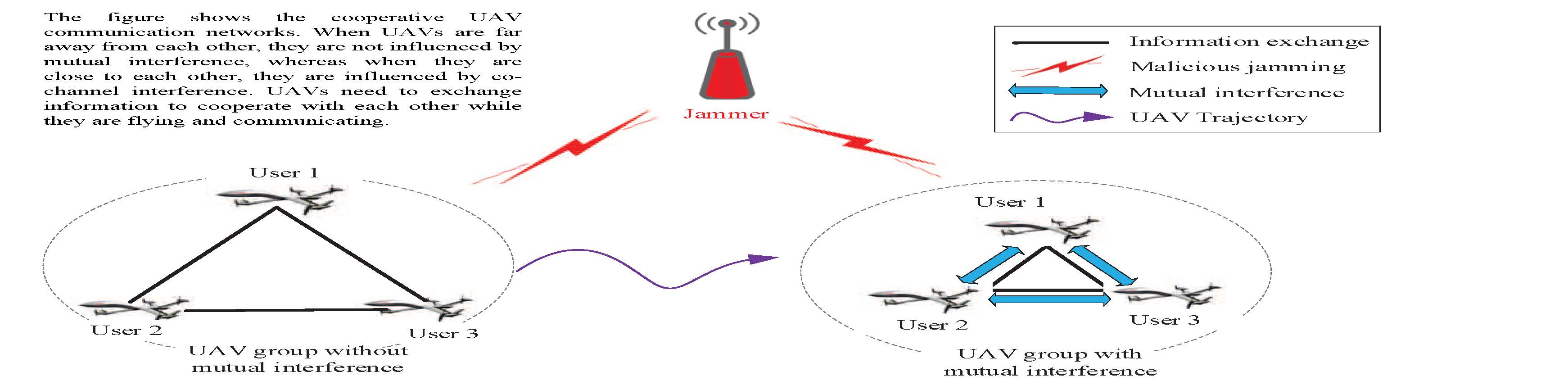
This paper investigates the cooperative anti-jamming distributed channel selection problem in UAV communication networks. Considering the existence of malicious jamming and co-channel interference, a location-aware cooperative anti-jamming scheme is designed for the purpose of maximizing the users' utilities. Users in the UAV group cooperate with each other via location information sharing. When the received interference energy is lower than mutual interference threshold, users conduct channel selection strategies independently. Otherwise, users take joint actions with a cooperative anti-jamming pattern under the impact of mutual interference. Aimed at the independent anti-jamming channel selection problem under no mutual interference, a Markov Decision Process framework is introduced, whereas for the cooperative anti-jamming channel selection case under the influence of co-channel mutual interference, a Markov game framework is employed. Furthermore, motivated by reinforcement learning with a ``Cooperation-Decision-Feedback-Adjustment" idea, we design a location-aware cooperative anti-jamming distributed channel selection algorithm (LCADCSA) to obtain the optimal anti-jamming channel strategies for the users with a distributed way. In addition, the channel switching cost and cooperation cost, which have great impact on the users' utilities, are introduced. Finally, simulation results show that the proposed algorithm converges to a stable solution with which the UAV group can avoid the malicious jamming as well as co-channel interference effectively.
Keywords:
location-aware
; cooperative anti-jamming
; Markov decision process
; Markove game
; reinforcement learning
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



