Submitted:
02 May 2026
Posted:
05 May 2026
You are already at the latest version
Abstract
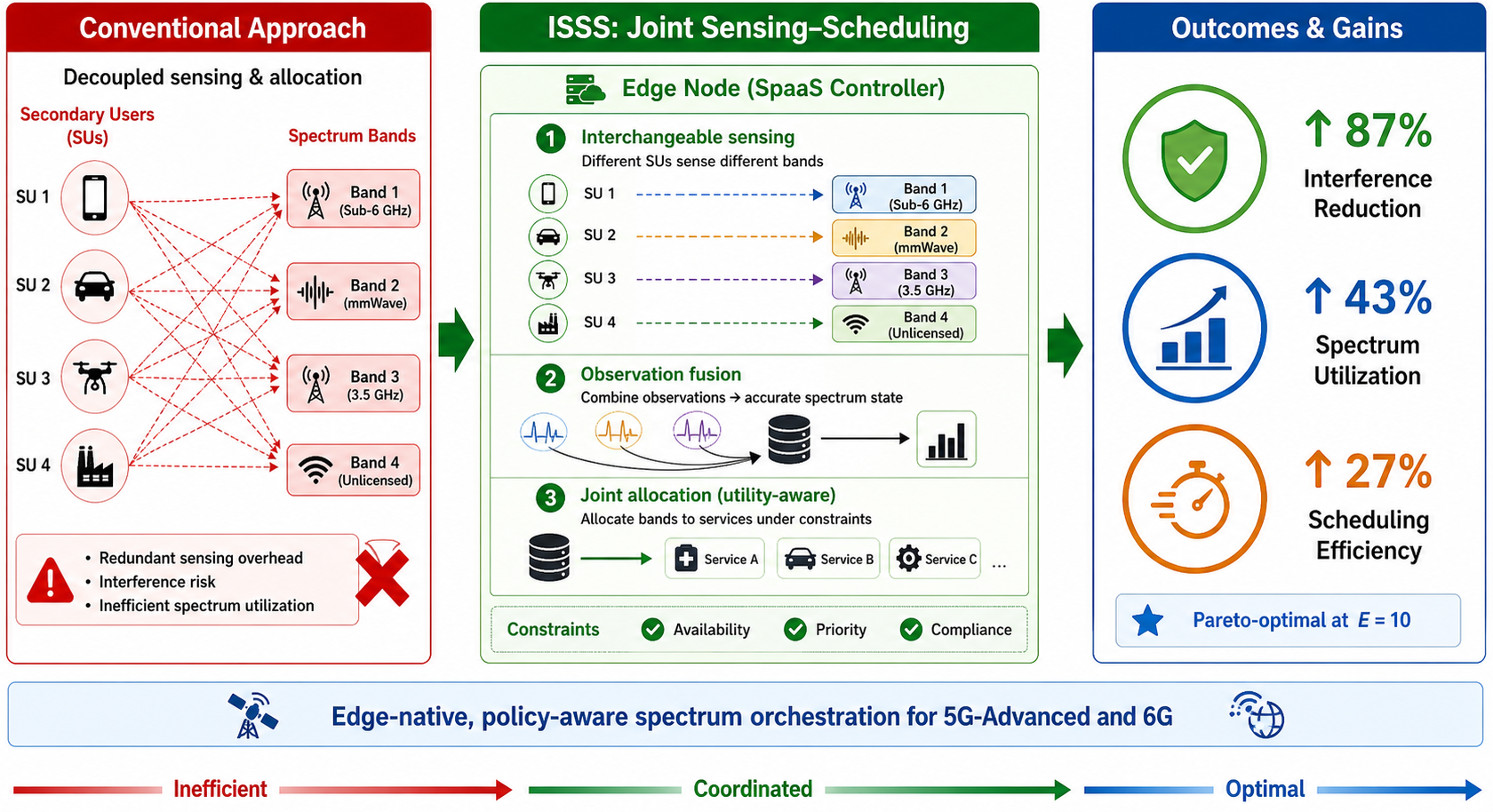
Fixed-allocation and loosely coordinated cooperative sensing frameworks are structurally inadequate for the spectrum management demands of 5G-Advanced and emerging 6G networks, as both treat sensing and allocation as decoupled processes unable to satisfy primary user protection, service-level agreements, and edge-native latency constraints simultaneously. This paper proposes an edge-native Spectrum-as-a-Service (SpaaS) framework based on the Interchangeable Spectrum Sensing Scheduling (ISSS) algorithm, in which sensing is treated as a schedulable, cost-bearing resource jointly optimized with spectrum allocation at the network edge. A formal system model is developed defining spectrum availability, sensing cost, service utility, and regulatory constraints as coupled elements of a single optimization structure, solved through a linear-complexity, single-pass heuristic enabling real-time execution. The framework is evaluated through Monte Carlo simulation under three primary user activity regimes against both a single-edge baseline and a cooperative sensing configuration at equivalent node count. Pareto efficiency frontier analysis identifies ten coordinated edge nodes as the optimal coordination density, at which point ISSS achieves an interference reduction gain of 87%, a spectrum utilization gain of 43%, and a scheduling efficiency gain of 27% over the single-edge baseline. These results establish ISSS as a practical, policy-aware, and scalable mechanism for dynamic spectrum orchestration in future wireless networks.
Keywords:
interchangeable spectrum sensing scheduling
; Spectrum-as-a-Service
; edge-native spectrum management
; multi-access edge computing
; 5G-Advanced and 6G networks
; cognitive radio networks
; cooperative sensing
; interference reduction
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



