Submitted:
28 April 2026
Posted:
29 April 2026
You are already at the latest version
Abstract
Small unmanned aerial vehicles (UAVs) are increasingly used in maritime monitoring, coastal inspection, environmental assessment and ISR-oriented research applications. Their operational and scientific value depends not only on endurance, payload capacity and navigation performance, but also on the extent to which acoustic and visual signatures can be measured, compared and managed without compromising aerodynamic efficiency, energy consumption or system reliability. This paper develops a systems engineering framework for acoustic and visual signature management in small multirotor UAVs, derived from a graduate thesis project on UAV modification for maritime-support applications. The proposed framework integrates measurable requirements, acoustic metrics, visual observability indicators, design-variable traceability and staged verification logic. Acoustic assessment is organized around sound pressure level, overall sound pressure level, blade-passing frequency and harmonic content, while visual assessment is structured through luminance contrast, apparent angular size, surface reflectance and background-dependent observability. Rather than presenting operational stealth claims, the study provides a conservative and verifiable methodology for transforming conceptual UAV modification work into reproducible scientific evidence. The contribution of this work is a publication-oriented framework that connects aeroacoustics, CFD-supported modelling, visual observability and multi-domain trade-off analysis within a responsible dual-use research boundary. The framework supports the systematic evaluation of UAV signature-management strategies while preserving academic transparency, technical reproducibility and ethical publication standards.
Keywords:
small UAV
; multirotor drone
; maritime monitoring
; acoustic signature
; visual observability
; propeller noise
; CFD
; FW-H analogy
; systems engineering
; aeroacoustics
1. Introduction
Small unmanned aerial vehicles (UAVs) have become relevant engineering platforms for inspection, monitoring, emergency response, maritime surveillance and intelligence, surveillance and reconnaissance (ISR)-oriented research. Their advantages include rapid deployment, relatively low operating cost, flexible payload integration and the capacity to operate in environments where crewed platforms may be impractical or disproportionate. In maritime and coastal environments, small UAVs can support observation of ports, coastal infrastructure, sea–land interfaces, environmental conditions and search areas. Nevertheless, their effectiveness depends on more than flight endurance or payload capacity. UAV observability, particularly acoustic and visual detectability, can influence mission feasibility, data quality, human acceptance and platform survivability in demanding environments.
Among rotary-wing and multirotor UAVs, propeller noise is one of the most distinctive components of the acoustic signature. The sound field is affected by blade geometry, rotational speed, loading, blade-tip vortices, wake interaction, broadband turbulence and tonal components associated with the blade-passing frequency (BPF). Foundational aeroacoustic theory, including the Ffowcs Williams–Hawkings formulation, provides the mathematical basis for predicting sound generated by moving surfaces and turbulent flow [1,2,3]. UAV-scale propellers have also been studied experimentally and numerically, showing that design variables such as blade twist, tip geometry, material treatment, rotational regime and propeller–propeller interaction may alter acoustic output and aerodynamic performance [4,5,6,7,8,9,10,11,12,27,28].
Visual detectability is a separate but coupled problem. A small UAV may be observed by unaided human vision, electro-optical systems, thermal sensors or automated computer-vision algorithms. Visual observability depends on apparent angular size, contrast against the background, motion, surface reflectance, illumination, atmospheric visibility, sensor characteristics and image-processing method [21,22,23,24,25,26]. In maritime environments, the visual background changes with sea state, cloud cover, sun angle, haze, port infrastructure and coastal terrain. A surface treatment that reduces visual contrast may also modify thermal behavior, mass, durability or drag; therefore, visual signature management should not be treated as a cosmetic addition independent of aerodynamics and energy performance.
The central problem addressed in this article is that acoustic and visual signature reduction are often discussed as isolated design objectives, whereas practical UAV design requires a system-level perspective. A low-noise propeller may reduce sound levels but may also alter thrust efficiency, current draw, maneuverability or structural loads. A low-reflectance coating may reduce specular reflections but may degrade under salt exposure, increase maintenance requirements or affect thermal properties. Consequently, a research manuscript on UAV signature management must show how requirements, design variables, metrics, verification activities and limitations are connected.
The objective of this paper is to develop a systems engineering framework for acoustic and visual signature management in small UAVs for maritime monitoring and ISR-oriented research applications. The specific contributions are: (i) to define acoustic and visual signature management as a multidisciplinary UAV design problem; (ii) to propose a measurable requirements-to-metrics structure; (iii) to connect CFD-oriented aeroacoustic modelling, acoustic measurement and visual assessment within a staged verification workflow; and (iv) to provide a realistic evidence roadmap for converting thesis-derived UAV modification work into a publishable scientific manuscript. The article deliberately avoids operational guidance and does not claim validated stealth performance. Its contribution is methodological, verifiable and bounded by scientific and ethical publication standards.
The novelty of this work lies in the integration of acoustic-spectrum analysis, visual observability metrics and systems-engineering traceability into a single verification-oriented framework for small UAV research. Unlike studies focused exclusively on propeller noise, visual detection or UAV conceptual design, the proposed structure connects requirements, design variables, measurable indicators, trade-offs and evidence maturity in a format suitable for converting thesis-derived UAV modifications into publishable scientific results. This contribution is particularly relevant for maritime UAV research, where acoustic emissions, visual contrast, aerodynamic efficiency, environmental exposure and reproducibility must be addressed as coupled design constraints rather than as isolated performance objectives.
2. State of the Art and Research Gap
2.1. Aeroacoustic Mechanisms in small UAV Propellers
Propeller noise in small UAVs originates from multiple mechanisms. Tonal noise is associated with periodic blade loading, thickness effects and the blade-passing frequency, whereas broadband noise is linked to turbulence, boundary-layer interaction, tip vortices and wake structures. The FW-H acoustic analogy remains a widely used theoretical reference for connecting unsteady aerodynamic quantities with far-field acoustic pressure [1,2,3]. In UAV applications, however, scale effects, low Reynolds number operation and compact multirotor configurations complicate direct translation from classical rotorcraft acoustics.
Experimental studies on small UAV propellers have shown that acoustic output depends strongly on RPM, blade geometry, loading and measurement configuration [4,6,7]. Numerical and combined experimental–computational studies have further demonstrated that blade twist and multidisciplinary optimization can influence both aerodynamic performance and acoustic emission [8,9,10,11]. These findings are relevant for journal submission because they show that noise-reduction claims must be expressed with test conditions, uncertainty, frequency content and performance trade-offs rather than as generic percentage reductions.
2.2. CFD, Computational Aeroacoustics and Metric Selection
Computational fluid dynamics (CFD) can provide pressure, velocity, vorticity and wake-structure information that is difficult to obtain experimentally at small scales. When coupled with computational aeroacoustics or FW-H post-processing, CFD may help estimate far-field acoustic signatures and identify design variables associated with tonal and broadband components. However, CFD-derived acoustic predictions are sensitive to mesh quality, turbulence model selection, time-step resolution, boundary conditions, rotating reference-frame treatment and acoustic sampling surfaces. For this reason, numerical predictions should be treated as part of an evidence chain, not as a replacement for validation.
A rigorous manuscript should report at least the propeller geometry, number of blades, diameter, pitch or equivalent geometric descriptors, RPM, thrust, distance to microphone, sampling frequency, environmental conditions and signal-processing approach. Frequency-domain analysis should identify BPF and harmonics, while broadband components should be discussed separately. Psychoacoustic metrics may also be useful when human response is relevant, but they should not be substituted for physical acoustic metrics such as SPL, OASPL and spectral levels [13,14,15].
2.3. Visual Signature Management and Observability
Visual signature management requires measurable descriptors. In a publication context, terms such as camouflage, concealment or visual stealth should be translated into variables that can be observed or computed: luminance contrast, chromatic contrast, reflectance, apparent angular size, detection probability, camera range, background class and observation geometry. Modern visual UAV detection studies increasingly rely on computer vision, distance estimation and long-range detection pipelines [21,22,23]. Work on covert UAV video sensing also highlights that observability is affected by trajectory, propulsion constraints and visual background [24,25,26].
For the present framework, visual management is not presented as a tactical evasion method. It is treated as a design and measurement problem in which surface reflectance, contrast and background-dependent observability are quantified under controlled, ethically bounded conditions. This framing is essential for aligning the article with engineering research rather than operational instruction.
2.4. Systems Engineering Gap
The literature contains robust contributions on aeroacoustic theory, UAV propeller noise, drone acoustic detection, visual UAV detection and UAV design. The remaining gap is not the absence of individual techniques, but the absence of a conservative integration structure that converts acoustic and visual considerations into verifiable requirements and evidence. Systems engineering is appropriate because signature management is constrained by aerodynamic efficiency, endurance, payload, control stability, materials, environmental exposure and reproducibility [29,30,31].
The research gap addressed by this work is therefore methodological: how to structure an article so that a thesis-derived UAV modification concept can be evaluated through metrics, trade-offs and verification stages without overstating unvalidated results. The proposed framework supports this conversion by linking mission context, system boundaries, design variables, metrics and evidence maturity.
3. Materials and Methods
3.1. Research Design and Dual-Use Boundary
This study is designed as a systems engineering framework paper supported by DOI-based literature and derived from graduate-level research on UAV modification for maritime-support applications. The article does not disclose classified information, operational deployment procedures, evasion tactics or mission-specific instructions. Its scientific focus is the formulation of measurable requirements, acoustic and visual metrics, verification logic and data requirements for future experimental or numerical validation.
The framework is intended for academic research, laboratory testing and transparent engineering evaluation. It provides a methodological structure for organizing thesis-derived UAV modification work through measurable indicators, verification stages and evidence traceability. When experimental, numerical or field-derived data are incorporated, the same structure can support progressively stronger levels of validation without altering the central systems-engineering logic of the manuscript from a framework article to a research article with experimental and/or numerical results.
The framework was derived from a graduate thesis project focused on the modification of small UAV platforms for maritime-support applications. The thesis provided the initial system boundary, the conceptual modification rationale and the first definition of acoustic-signature reduction as an engineering problem. In the present manuscript, that thesis-derived work is reformulated into a publication-oriented systems engineering structure based on measurable indicators, verification stages and evidence traceability. This approach allows the original academic work to be translated into a reproducible research framework suitable for peer-reviewed evaluation without overstating unvalidated performance claims.
3.2. System Boundary for Maritime ISR-Oriented UAV Research
The UAV is represented as an integrated system composed of propulsion, frame structure, energy storage, payload, flight control, surface treatment, operational environment and observer/sensor subsystems. The maritime environment includes wind, humidity, salt exposure, sea-surface background, sky condition, port infrastructure and variable ambient noise. The observer/sensor subsystem includes human observers, microphones, cameras and image-processing pipelines. This boundary prevents the analysis from reducing signature management to propeller geometry alone.
Figure 1.
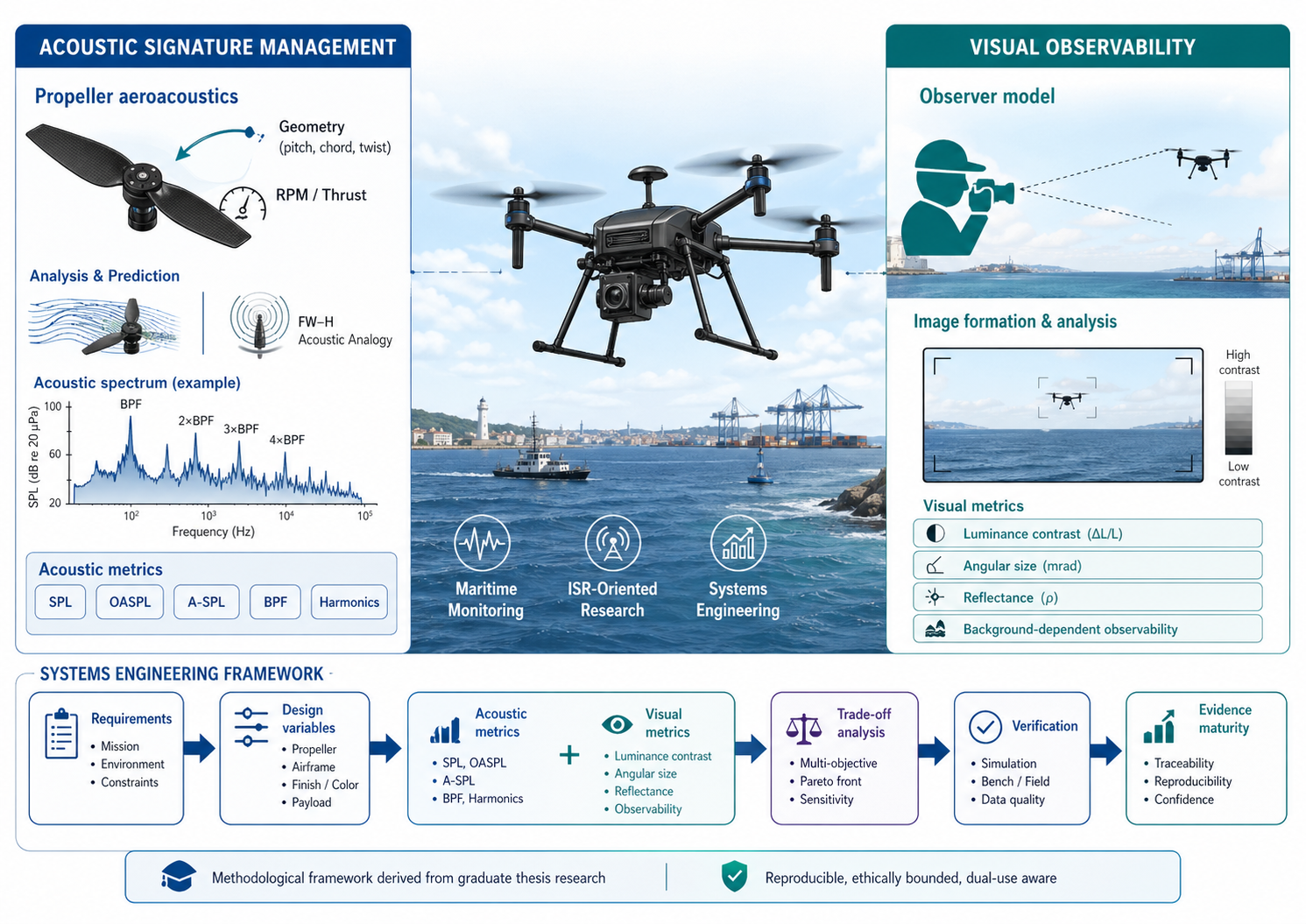
Systems-engineering workflow for acoustic and visual signature management in small UAVs. The framework links maritime monitoring and ISR-oriented research requirements, system boundaries, acoustic and visual indicators, design variables, trade-off analysis and verification activities. The figure emphasizes that signature management should be evaluated as an integrated engineering process rather than as an isolated propeller-noise or camouflage problem.
Figure 1.
Systems-engineering workflow for acoustic and visual signature management in small UAVs. The framework links maritime monitoring and ISR-oriented research requirements, system boundaries, acoustic and visual indicators, design variables, trade-off analysis and verification activities. The figure emphasizes that signature management should be evaluated as an integrated engineering process rather than as an isolated propeller-noise or camouflage problem.

3.3. Acoustic Metrics and Equations
The minimum acoustic assessment should include narrowband and broadband descriptors. The recommended indicators are sound pressure level (SPL), overall sound pressure level (OASPL), A-weighted sound pressure level (A-SPL) where human perception is relevant, blade-passing frequency, harmonic content, broadband spectral levels and uncertainty. BPF is computed from the number of blades and rotational speed as follows:
where N_b is the number of blades and RPM is the rotational speed. Acoustic pressure levels should be referenced to the standard pressure of 20 µPa:
BPF = (N_b × RPM) / 60
SPL = 20 log10(p_rms / p_ref), p_ref = 20 µPa
A baseline-to-modified comparison may be expressed as ΔL = L_modified − L_baseline. Negative values indicate reduced acoustic level, but the result must be reported with test conditions, frequency range and uncertainty. A reduction in a narrow frequency band does not necessarily imply lower OASPL or lower detectability under all environmental conditions.
Figure 2.
Proposed acoustic-spectrum analysis structure for baseline and modified UAV propeller configurations. The figure illustrates how frequency-domain acoustic data can be interpreted through sound pressure level, blade-passing frequency and harmonic content. The plotted spectrum is intended to support methodological explanation and should be interpreted as a structured analysis format for thesis-derived acoustic data.
Figure 2.
Proposed acoustic-spectrum analysis structure for baseline and modified UAV propeller configurations. The figure illustrates how frequency-domain acoustic data can be interpreted through sound pressure level, blade-passing frequency and harmonic content. The plotted spectrum is intended to support methodological explanation and should be interpreted as a structured analysis format for thesis-derived acoustic data.

3.4. Visual Metrics and Equations
The visual assessment should report contrast-based and context-based variables. Minimum descriptors include apparent angular size, luminance contrast, surface reflectance, background class, sky or sea condition, illumination angle, sensor type and detection criterion. A basic luminance contrast index can be defined as:
where L_target is the measured or estimated luminance of the UAV, L_background is the luminance of the relevant background and ε is a small positive value to avoid division instability under very low background luminance. Apparent angular size may be approximated by:
where d is a characteristic target dimension and R is observer-to-target distance. These indicators do not by themselves prove non-detectability. They support repeatable comparison under documented observation conditions.
C_L = |L_target − L_background| / (L_background + ε)
θ ≈ 2 arctan(d / 2R)
3.5. Multi-Domain Trade-Off Analysis
Signature management should be evaluated as a constrained design trade-off. A low-noise modification that substantially reduces flight time or thrust margin may be unsuitable. Similarly, a visual treatment that improves contrast metrics but degrades durability or increases mass may not be acceptable. The framework therefore recommends documenting acoustic benefit, visual benefit, aerodynamic performance, energy consumption, structural feasibility, durability and reproducibility. A normalized design score may be expressed as:
where S_a, S_v, S_e, S_r and S_d denote normalized acoustic, visual, energy, reliability and durability scores, respectively, and w_i are weighting coefficients justified by the research objective. This equation is not a universal optimization law; it is a transparent way to document assumptions and avoid unsupported selection of a preferred configuration.
J = w_a S_a + w_v S_v + w_e S_e + w_r S_r + w_d S_d
3.6. Verification and Evidence Package
For reproducible evaluation as an original research article, the evidence package should include: (i) baseline and modified geometry description; (ii) aerodynamic operating conditions; (iii) SPL or OASPL comparison; (iv) frequency spectrum with BPF and harmonic identification; (v) thrust and energy-performance comparison; (vi) CFD or flow-field evidence if available; (vii) visual contrast or image-based observability assessment; (viii) uncertainty, repeatability and environmental conditions; and (ix) clear separation between literature-supported expectations and original results.
4. Framework Results and Publication-Oriented Outputs
4.1. Requirements-to-Metrics Traceability
The first output of the framework is a traceability structure that connects research needs with measurable indicators. Table 1 converts the broad objective of acoustic and visual signature management into variables, metrics and verification activities. This is essential for journal review because it allows reviewers to distinguish between conceptual design claims, numerical predictions and experimental evidence.
4.2. Evidence Mapping from DOI-Based Literature
The second output is an evidence map. Table 2 links the framework to DOI-based literature without transferring published findings as original results. This distinction is important: literature can justify the plausibility and relevance of a design approach, but original claims must be supported by the authors’ own data.

Table 3.
links the framework to DOI-based literature without transferring published findings as original results.
Table 3.
links the framework to DOI-based literature without transferring published findings as original results.
| Evidence area | Representative DOI-based support | Implication for the present framework |
|---|---|---|
| Aeroacoustic modelling | FW-H theory and rotating-blade acoustic formulations [1,2,3] | Use CFD/FW-H as a prediction and interpretation tool, not as unvalidated proof. |
| Small UAV propeller noise | Experimental and numerical propeller-noise studies [4,5,6,7,8,9,10,11,12] | Report spectra, RPM, geometry and operating conditions for baseline and modified configurations. |
| Human response and psychoacoustics | Drone-noise perception and response metrics [13,14,15] | Use psychoacoustic indicators only when the research question involves human perception. |
| Acoustic drone detection | Acoustic signature identification and classification [16,17,18,19,20] | Recognize that detectability depends on environmental noise, sensor range, classifiers and spectral content. |
| Visual UAV detection | Vision-based drone detection and distance estimation [21,22,23] | Use visual metrics that can be reproduced with camera settings and background conditions. |
| Visual observability and trajectory-coupled studies | Visual camouflage and covert sensing studies [24,25,26] | Frame visual management as measurable observability, avoiding tactical recommendations. |
| UAV systems engineering | Conceptual and systems-based UAV design [29,30,31] | Connect design variables, requirements, constraints and verification in one traceable structure. |
4.3. Evidence Maturity for a Thesis-Derived Manuscript
A thesis-derived article is often strong in conceptual rationale but incomplete in journal-level evidence. Figure 3 provides an evidence-maturation matrix that can be updated once original acoustic, CFD and visual data are inserted. The matrix is not a result of field testing; it is a manuscript-development tool designed to identify what is ready, partial or missing before submission.
5. Discussion
The proposed framework improves the scientific defensibility of UAV signature-management research in three ways. First, it converts broad statements about stealth or reduced detectability into measurable variables. This is essential because terms such as quiet, low-signature or visually discreet can be interpreted subjectively unless connected to SPL, BPF, OASPL, luminance contrast, reflectance or detection criteria. Second, it forces acoustic and visual modifications to be evaluated together with aerodynamic and energy constraints. This avoids the common weakness of optimizing one subsystem while ignoring system-level consequences. Third, it distinguishes between literature-supported expectations and original results, which is necessary for publication ethics and reviewer confidence.
For a high-impact journal, the most vulnerable part of a manuscript on this topic is the evidence behind claimed reductions. If the paper states that a propeller modification reduces noise by a certain percentage, reviewers will expect to see a baseline, a modified configuration, a measurement distance, microphone calibration, RPM, thrust, environmental conditions, uncertainty and spectral analysis. A similar standard applies to visual claims: a reduction in detection distance cannot be asserted without defining observer type, camera characteristics, background, illumination, detection criterion and statistical procedure. Therefore, the safest scientific framing is to present this paper as a framework unless original data are added.
The maritime environment also complicates interpretation. Ambient sound from wind, waves, vessels and port machinery can mask or expose different frequency bands. Visual background is equally variable because sea surfaces, clouds, coastal infrastructure and sun glint change rapidly. For this reason, the framework recommends separating laboratory, controlled-flight and maritime-context evidence. Laboratory results can demonstrate physical feasibility; controlled flight can evaluate system behavior; maritime-context testing can assess external validity. These stages should not be collapsed into a single claim of operational effectiveness.
The article is also strengthened by avoiding promotional or tactical language. The phrase “signature management” is more appropriate than “stealth” for an academic engineering journal because it emphasizes measurement, design trade-offs and verification. The proposed wording also aligns better with ethical publication expectations for dual-use technologies. The manuscript should not describe procedures for avoiding detection in real operations. Instead, it should present reproducible engineering metrics, transparent assumptions and safety boundaries.
6. Scope, Limitations and Validation Pathway
The present article is structured as a systems engineering framework rather than as a complete experimental validation study. Therefore, original CFD contours, calibrated acoustic spectra, FW-H acoustic predictions, repeated thrust-stand measurements, visual-contrast experiments and maritime field-validation data are treated as subsequent validation layers rather than as central claims of the current manuscript. This scope is intentional: the objective is to define a reproducible and ethically bounded structure for evaluating acoustic and visual signature-management strategies in small UAVs.
The main limitation of the framework is that its strength depends on the quality and completeness of the evidence inserted into each verification stage. Acoustic claims require documented propeller geometry, number of blades, RPM, microphone distance, calibration procedure, sampling frequency, environmental conditions and spectral analysis. Visual claims require controlled background conditions, illumination description, camera or sensor characteristics, distance, apparent target size and a clearly defined contrast or detection metric. Without these elements, signature-management statements should be interpreted as methodological guidance rather than as validated performance outcomes.
Future validation should proceed through staged evidence development. The first stage should compare baseline and modified UAV configurations under controlled laboratory conditions, including SPL, OASPL, A-SPL, BPF, harmonic content, thrust and power consumption. The second stage should incorporate CFD-supported flow-field analysis and, when feasible, FW-H-based acoustic prediction to interpret the relationship between blade geometry, vortex behavior and acoustic emission. The third stage should evaluate visual observability through image-based contrast metrics under documented background and illumination conditions. Finally, integrated trade-off analysis should assess whether acoustic or visual improvements are achieved without unacceptable penalties in aerodynamic efficiency, endurance, durability or reproducibility.
This staged pathway allows thesis-derived UAV modification work to be progressively transformed into peer-reviewable scientific evidence. It also prevents unsupported operational claims by separating conceptual rationale, numerical modelling, laboratory evidence and maritime-context validation. In this sense, the framework provides a conservative basis for future experimental and computational research on UAV acoustic and visual signature management.
7. Conclusions
This paper developed a systems engineering framework for acoustic and visual signature management in small UAVs for maritime monitoring and ISR-oriented research applications. The framework integrates aeroacoustic metrics, visual observability descriptors, CFD-oriented modelling logic, design-variable traceability and staged verification. It provides a conservative structure for transforming a thesis-derived UAV modification concept into a scientifically defensible manuscript.
The main contribution is methodological. Rather than claiming validated stealth performance, the article defines how such claims should be measured, documented and verified. Acoustic assessment should include SPL, OASPL, BPF, harmonic content, operating conditions and uncertainty. Visual assessment should include luminance contrast, apparent size, reflectance, background class and detection criteria. Trade-off analysis should include aerodynamic efficiency, energy consumption, durability and reproducibility.
The framework is suitable as a foundation for journal submission when positioned as a methodological or systems-engineering contribution. Its scientific value increases when thesis-derived acoustic, aerodynamic, CFD and visual data are incorporated into the proposed evidence structure. This distinction is essential for maintaining academic honesty, technical credibility and editorial viability in high-impact UAV and aerospace engineering journals.
Author Contributions
Conceptualization, D.S.-H., G.U.-S. and G.R.-R.; methodology, D.S.-H., G.U.-S. and M.P.-O.; software, D.S.-H. and C.E.H.-B.; validation, D.S.-H., B.R.-A., J.P.-O. and M.P.-O.; formal analysis, D.S.-H. and J.M.-R.; investigation, D.S.-H., A.T.-E. and J.A.G.-N.; resources, G.U.-S. and G.R.-R.; data curation, D.S.-H. and L.I.L.-C.; writing—original draft preparation, D.S.-H.; writing—review and editing, G.U.-S., G.R.-R., B.R.-A., J.P.-O. and M.P.-O.; visualization, D.S.-H. and J.R.G.-I.; supervision, G.U.-S., G.R.-R. and M.P.-O.; project administration, D.S.-H. and G.U.-S. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
not applicable. The study does not involve human participants, animals or personal data.
Data Availability Statement
No new experimental dataset is reported in this framework manuscript. The proposed framework defines the data structure required for future reproducible acoustic, CFD-supported and visual-observability assessments.
Acknowledgments
The authors acknowledge the academic guidance, technical discussions and institutional support received during the development of the underlying graduate research. The authors also acknowledge the use of grammar and language-assistance tools for clarity, grammar and editorial consistency. Scientific interpretation, technical judgment and final responsibility remain with the authors.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| BPF | Blade Passing Frequency |
| CFD | Computational Fluid Dynamics |
| DI | Detectability Index |
| FW-H | Ffowcs Williams–Hawkings |
| RPM | Revolutions Per Minute |
| A-SPL | A-weighted Sound Pressure Level |
| OASPL | Overall Sound Pressure Level |
| SNR | Signal-to-Noise Ratio |
| SPL | Sound Pressure Level |
| UAV | Unmanned Aerial Vehicle |
References
- Ffowcs Williams, J.E.; Hawkings, D.L. Sound generation by turbulence and surfaces in arbitrary motion. Philosophical Transactions of the Royal Society of London. Series A, Mathematical and Physical Sciences 1969, 264, 321–342. [Google Scholar] [CrossRef]
- Brentner, K.S.; Farassat, F. Modeling aerodynamically generated sound of helicopter rotors. Prog. Aerosp. Sci. 2003, 39, 83–120. [Google Scholar] [CrossRef]
- Ianniello, S. New perspectives in the use of the Ffowcs Williams–Hawkings equation for aeroacoustic analysis of rotating blades. J. Fluid Mech. 2007, 570, 79–127. [Google Scholar] [CrossRef]
- Sinibaldi, G.; Marino, L. Experimental analysis on the noise of propellers for small UAV. Appl. Acoust. 2013, 74, 79–88. [Google Scholar] [CrossRef]
- Leslie, A.; Wong, K.C.; Auld, D. Broadband noise reduction on a mini-UAV propeller. In Proceedings of the 14th AIAA/CEAS Aeroacoustics Conference, Vancouver, BC, Canada, 5–7 May 2008. [Google Scholar] [CrossRef]
- Papa, U.; Iannace, G.; Del Core, G.; Giordano, G. Sound power level and sound pressure level characterization of a small unmanned aircraft system during flight operations. Noise Vib. Worldw. 2017, 48, 67–74. [Google Scholar] [CrossRef]
- Bu, H.; Wu, H.; Bertin, C.; Fang, Y.; Zhong, S. Aerodynamic and acoustic measurements of dual small-scale propellers. J. Sound. Vib. 2021, 511, 116330. [Google Scholar] [CrossRef]
- Cussen, K.; Garruccio, S.; Kennedy, J. UAV noise emission—A combined experimental and numerical assessment. Acoustics 2022, 4, 297–312. [Google Scholar] [CrossRef]
- Sun, J.; Yonezawa, K.; Tanabe, Y.; Sugawara, H.; Liu, H. Blade twist effects on aerodynamic performance and noise reduction in a multirotor propeller. Drones 2023, 7, 252. [Google Scholar] [CrossRef]
- Xue, D.; Yan, Q.; Li, Z.; Wei, K. Multidisciplinary optimization design of low-noise aircraft propellers. Aerospace 2023, 10, 254. [Google Scholar] [CrossRef]
- Wei, W.; Ma, Y.; Wei, S.; Wang, D.; Guo, M.; Yan, Q. Analysis and evaluation of aerodynamic noise characteristics of toroidal propeller. Drones 2024, 8, 753. [Google Scholar] [CrossRef]
- Hasegawa, M.; Sakaue, H. Propeller-noise reduction by microfiber coating on a blade surface. Sens. Actuators A Phys. 2024, 371, 115273. [Google Scholar] [CrossRef]
- Torija, A.J.; Paruchuri, C.; Li, Z. Psychoacoustic analysis of contra-rotating propeller noise for unmanned aerial vehicles. J. Acoust. Soc. Am. 2021, 149, 835–846. [Google Scholar] [CrossRef]
- Schäffer, B.; Pieren, R.; Heutschi, K.; Wunderli, J.M.; Becker, S. Drone noise emission characteristics and noise effects on humans—A systematic review. Int. J. Environ. Res. Public Health 2021, 18, 5940. [Google Scholar] [CrossRef] [PubMed]
- Torija, A.J.; Nicholls, R.K. Investigation of metrics for assessing human response to drone noise. Int. J. Environ. Res. Public Health 2022, 19, 3152. [Google Scholar] [CrossRef]
- Bernardini, A.; Mangiatordi, F.; Pallotti, E.; Capodiferro, L. Drone detection by acoustic signature identification. Electron. Imaging 2017, 2017, 60–64. [Google Scholar] [CrossRef]
- Kolamunna, H.; Dahanayaka, T.; Li, J.; Seneviratne, S.; Thilakaratne, K.; Zomaya, A.Y.; Seneviratne, A. DronePrint: Acoustic signatures for open-set drone detection and identification with online data. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2021, 5, 20. [Google Scholar] [CrossRef]
- Kolamunna, H.; Li, J.; Dahanayaka, T.; Seneviratne, S.; Thilakaratne, K.; Seneviratne, A. AcousticPrint: Acoustic signature based open set drone identification. Proceedings of WiSec 2020, Linz, Austria, 8–10 July 2020. [Google Scholar] [CrossRef]
- Mięsikowska, M. Classification of unmanned aerial vehicles based on acoustic signals obtained in external environmental conditions. Sensors 2024, 24, 5663. [Google Scholar] [CrossRef] [PubMed]
- Jekateryńczuk, G.; Piotrowski, Z. Outdoor microphone range tests and spectral analysis of UAV acoustic signatures for array development. Sensors 2025, 25, 7057. [Google Scholar] [CrossRef]
- Lai, Y.C.; Tsai, C.H.; Chen, C.H.; Hsu, W.H.; Wang, J.H. Detection of a moving UAV based on deep learning-based distance estimation. Remote Sens. 2020, 12, 3035. [Google Scholar] [CrossRef]
- Liu, Z.; An, P.; Yang, Y.; Qiu, S.; Liu, Q.; Xu, X. Vision-based drone detection in complex environments: A survey. Drones 2024, 8, 643. [Google Scholar] [CrossRef]
- Haddad, A.G.; Humais, A.M.; Werghi, N.; Shoufan, A. Long-range visual UAV detection and tracking system with threat level assessment. Proceedings of IECON 2020, Singapore, 18–21 October 2020. [Google Scholar] [CrossRef]
- Hu, S.; Yuan, X.; Ni, W.; Wang, X.; Jamalipour, A. Visual camouflage and online trajectory planning for unmanned aerial vehicle-based disguised video surveillance: Recent advances and a case study. IEEE Veh. Technol. Mag. 2023, 18, 48–57. [Google Scholar] [CrossRef]
- Hu, S.; Ni, W.; Wang, X.; Jamalipour, A.; Ta, D. Joint optimization of trajectory, propulsion, and thrust powers for covert UAV-on-UAV video tracking and surveillance. IEEE Trans. Inf. Forensics Secur. 2021, 16, 1959–1972. [Google Scholar] [CrossRef]
- Almuzaini, T.S.; Savkin, A.V. Navigation of a team of UAVs for covert video sensing of a target moving on an uneven terrain. Remote Sens. 2024, 16, 4273. [Google Scholar] [CrossRef]
- Shukla, D.; Komerath, N. Multirotor drone aerodynamic interaction investigation. Drones 2018, 2, 43. [Google Scholar] [CrossRef]
- Shukla, D.; Komerath, N. Low Reynolds number multirotor aerodynamic wake interactions. Exp. Fluids 2019, 60, 77. [Google Scholar] [CrossRef]
- Sóbester, A.; Keane, A.J.; Scanlan, J.; Bressloff, N.W. Conceptual design of UAV airframes using a generic geometry service. In Proceedings of the Infotech@Aerospace Conference, Arlington, VA, USA, 26–29 September 2005. [Google Scholar] [CrossRef]
- Sadraey, M. A systems engineering approach to unmanned aerial vehicle design. In Proceedings of the 10th AIAA Aviation Technology, Integration, and Operations Conference, Fort Worth, TX, USA, 13–15 September 2010. [Google Scholar] [CrossRef]
- Steurer, M.; Morozov, A.; Janschek, K.; Neitzke, K.P. SysML-based profile for dependable UAV design. IFAC-PapersOnLine 2018, 51, 1067–1074. [Google Scholar] [CrossRef]
Figure 3.
Evidence-maturation matrix for a thesis-derived UAV signature-management manuscript. The matrix organizes the transition from conceptual rationale to reproducible scientific evidence by distinguishing between literature-supported assumptions, preliminary thesis-derived evidence, numerical modelling, experimental validation and integrated trade-off analysis.
Figure 3.
Evidence-maturation matrix for a thesis-derived UAV signature-management manuscript. The matrix organizes the transition from conceptual rationale to reproducible scientific evidence by distinguishing between literature-supported assumptions, preliminary thesis-derived evidence, numerical modelling, experimental validation and integrated trade-off analysis.

Table 1.
Proposed minimum dataset structure for reproducible UAV acoustic and visual signature assessment.
Table 1.
Proposed minimum dataset structure for reproducible UAV acoustic and visual signature assessment.
| Parameter | Baseline configuration | Modified configuration | Measurement or data source | Relevance to the framework |
|---|---|---|---|---|
| Propeller diameter | To be reported | To be reported | Direct measurement or manufacturer datasheet | Defines the geometric scale of the propulsion system |
| Number of blades | To be reported | To be reported | Direct inspection or technical datasheet | Required for blade-passing frequency calculation |
| Propeller pitch or equivalent geometric descriptor | To be reported | To be reported | Manufacturer datasheet or geometric measurement | Supports comparison of aerodynamic and acoustic behavior |
| Rotational speed (RPM) | To be reported | To be reported | Tachometer, ESC log or flight-controller data | Determines BPF and acoustic operating condition |
| Thrust | To be reported | To be reported | Static thrust stand or controlled test | Verifies that acoustic changes do not compromise lift generation |
| Current draw or electrical power | To be reported | To be reported | Power meter, ESC log or battery telemetry | Evaluates energy cost of the modification |
| Microphone distance | To be reported | To be reported | Acoustic measurement protocol | Required for reproducible SPL comparison |
| Sampling frequency | To be reported | To be reported | Audio acquisition system | Determines frequency-resolution capability |
| SPL or OASPL | To be reported | To be reported | Calibrated microphone or sound level meter | Quantifies acoustic signature variation |
| Blade-passing frequency | To be reported | To be reported | Computed from RPM and blade number | Identifies tonal components and harmonics |
| Visual contrast index | To be reported | To be reported | Image-based processing under controlled background | Quantifies visual observability |
| Surface treatment or coating description | To be reported | To be reported | Material description or experimental note | Links visual management to physical modification |
| Environmental conditions | To be reported | To be reported | Laboratory or field-test log | Supports repeatability and interpretation |
Note: This table defines the minimum dataset structure recommended for reproducible comparison between baseline and modified UAV configurations. Numerical values should be incorporated when derived from controlled measurements, validated simulations or documented technical sources.
Table 2.
converts the broad objective of acoustic and visual signature management into variables, metrics and verification activities.
Table 2.
converts the broad objective of acoustic and visual signature management into variables, metrics and verification activities.
| Research requirement | Design variable | Primary metric | Verification method | Minimum evidence before submission |
|---|---|---|---|---|
| Reduce propeller acoustic signature | Blade geometry, RPM, tip design, surface condition | SPL, OASPL, BPF harmonics, broadband spectrum | Microphone measurement; CFD/FW-H if available | Baseline vs. modified spectrum with test conditions |
| Preserve aerodynamic function | Diameter, pitch, blade twist, airfoil, mass | Thrust, power, efficiency, stability margin | Static thrust stand; flight logs; CFD | Thrust and current comparison at matched operating points |
| Reduce visual contrast | Surface reflectance, matte finish, background matching | Luminance contrast, apparent size, detection score | Controlled images; calibrated camera; background classification | Image-based contrast comparison under documented illumination |
| Maintain maritime suitability | Material durability, coating adhesion, corrosion tolerance | Mass change, surface degradation, maintenance interval | Salt exposure screening; inspection; mass measurement | Material and durability notes |
| Ensure reproducibility | Test protocol, processing scripts, data availability | Repeatability, uncertainty, metadata completeness | Open processing code; repeated tests | Methods detailed enough to be reproduced |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



