Submitted:
19 April 2026
Posted:
21 April 2026
You are already at the latest version
Abstract
This paper proposes Functional Consciousness (FC) as a measurable architectural property: the observable capacity of a system to access and reason about internal representations of its own states. We introduce a computationally tractable metric on FC that operationalizes core tenets of major consciousness theories through self-models and their associated reasoning power, measured through informational richness and state-space expansion under inference. The resulting Functional Consciousness Score (FCS) is applied to benchmark systems with known internal structure, including a Waymo L4 autonomous vehicle. To extend the framework to black-box systems, we present Functional Self-Model Analysis (FSMA), an abductive methodology for inferring self-models from behavioral evidence. Applied to stream-of-consciousness literature, FSMA yields a catalog of self-models that serves as a reference for estimating functional consciousness in more complex biological and artificial agents. The resulting scores align with intuitive gradients of cognitive sophistication while remaining operationally grounded. Finally, we compare FC with major theories of consciousness and argue that several of their central functional claims become partially measurable within this framework.
Keywords:
AI benchmarking
; AGI
; cognitive architectures
; consciousness
; IIT
; information theory
; machine consciousness
; philosophy of mind
1. Introduction
An AI system cannot be genuinely general if it cannot become an object of its own reasoning. As systems move from narrow task execution toward autonomous, general behavior, the ability to represent, inspect, and reason about internal states becomes a central engineering problem. This capacity is required for AI safety, reasoning about an agent’s own cognitive limits, and Theory of Mind (modelling others like yourself) [20]. It also addresses practical issues like memory reorganization and error reporting. However, it remains unclear how to define or measure this architectural feature.
This paper proposes Functional Consciousness (FC) to capture a system’s observable capacity to access and reason about its internal states. We deliberately sidestep the hard problem of consciousness [8] and phenomenal consciousness—the question of “what it feels like” to a subject—while revisiting their relation to FC in the final section. Instead, we ground our work in functionalism [21] and access consciousness [7]. These frameworks define mental states by their functional roles in producing observable behavior. Viewed this way, functional consciousness becomes a tangible architectural property rather than an elusive quality.
Definition 1 (Functional Consciousness, FC). The observable capacity of a system to access and process internal representations of its own states to produce behavior.
By adding the self-model as a new unit of analysis, we can apply the tools of information theory [6] to measure the predictive and reasoning power of these models. In this section, we validate this metric by benchmarking white-box agents with known structures, including a Waymo L4 autonomous taxi.
We then extend this method to agents with unknown internal structures. While this involves coarser approximations, we can still provide numerical estimates for their FC. We validate this black-box approach by benchmarking a range of agents. Finally, we discuss how FC relates to several well-known theories of general consciousness.
The primary contribution of this paper is not a new metaphysical theory, but a methodological pivot toward operationalization. By assigning mathematical values to representational capacity and reasoning expansion, we transform consciousness from a binary philosophical debate into a graded, measurable engineering metric.
2. Self-Models
Thomas Metzinger introduced the self-model as a single, unified construct [17]. We take a more granular approach: treating the capacity for self-reflection as an aggregate of multiple self-models. This aligns with Graziano’s Attention Schema Theory [13] and LeCun’s World Models [16]. Building on earlier proposals [3], we provide a more formal grounding:
Definition 2 (Self-Model). A self-model is any internal representation that functionally models the system’s own states, processes, or capacities, and whose content is available to global reasoning processes.
Consider the following statement as an intuitive indicator:
“I can run faster than you.”
This phrase implies the agent possesses an internal representation of its physical capabilities. To produce such a comparison, the underlying model must exhibit several observable characteristics:
- Domain: The functional area covered (e.g., kinematics).
- Conceptual Breadth (B): The range of features tracked (e.g., running and jumping performance).
- Conceptual Depth (D): The granularity of information (e.g., statistics on peak velocity or endurance).
- Reasoning Power (P): The performance of the inference engine operating on the model to predict the future (e.g., extrapolating performance to a future race).
Quantifying these properties is difficult because domains often overlap. For example, a robot’s spatial self-model may be indistinguishable from its body model or an external 3D map.
Note the absence of interconnection between self-models as proposed by Integrated Information Theory [24]. Instead, self-models are illuminated by attention, making their contents available to global reasoning processes which effectively perform the integration.
3. Scoring Self-Models
Our scoring system rewards agents with broad, detailed, and actionable self-representations. A better self-model tracks more phenomena (breadth) with higher granularity (depth), and enables the system to compute useful conclusions (reasoning power).
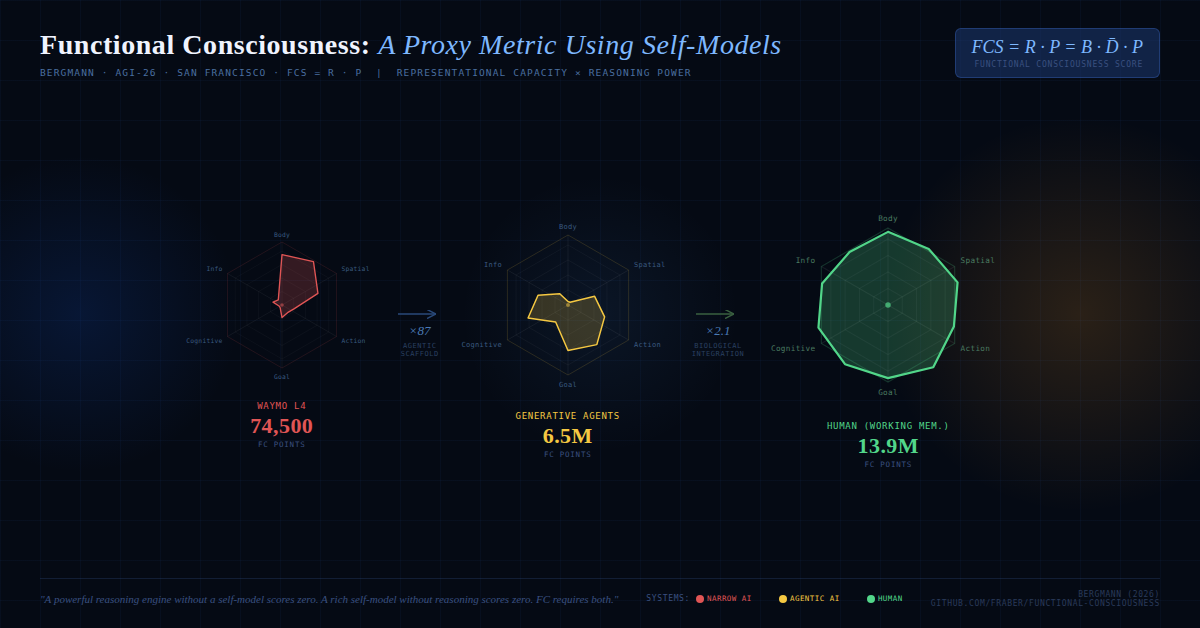
We define the Functional Consciousness Score (FCS) of a single self-model as the product of its representational capacity and its reasoning power. This multiplicative structure explains why legacy AI systems often exhibited low FC despite possessing detailed data: their reasoning engines were too weak to extract significant utility from the model. Conversely, a powerful reasoning engine (like a stateless LLM) scores zero if it lacks a persistent self-model to operate upon.
Figure 1.
Scheme of State-Space Expansion and Mutual Information.

To formalize this, we draw on the language of predictive information [6] to express representational capacity (R) and reasoning power (P).
Bialek et al. argue that most information a system processes is actually useless noise. True complexity lies in the predictive information—the subset of mutual information from the past that actually helps predict the future.
Definition 3 (Functional Consciousness Score, FCS). For a self-model m in domain f, the Functional Consciousness Score is defined as:
where:
- (Representational Capacity) is the sum of mutual information between each independent self-model variable and the corresponding system state variable .
- (Reasoning Power) is measured as the state-space expansion rate per reasoning cycle—the rate at which distinguishable, reachable states grow through inference over time.
Representational capacity can be decomposed into two factors:
where:
- (Breadth) is the effective dimensionality: the number of variables tracked above a noise threshold .
- (Depth) is the average mutual information per tracked variable: .
To summarize, R measures the state-space size and P measures the expansion rate, so calculates the total volume of the conclusion manifold per reasoning cycle.
4. Combining Multiple Self-Models
To score an entire agent possessing multiple self-models, we must consider how its global reasoning integrates them:
No cross-reasoning: Without inter-model reasoning, the agent’s total score simply sums the individual scores: .
Perfect cross-reasoning At the other extreme, an agent capable of drawing all possible conclusions across its self-models achieves informational closure. In this case, the total capacity is additive: . The reasoning power becomes exponential with the number of combined self-models: . This aligns with the highest levels of in Integrated Information Theory [24], where the system exists as a single, irreducible causal entity.
Practical cross-reasoning Real-world agents fall between these extremes. Modern LLMs outperform legacy symbolic systems by orders of magnitude in cross-domain integration; techniques like abstraction and heuristics expand the accessible state-space and directly increase . Future research could formalize integration density as a graph metric: self-models as nodes, causal inferences as edges.
5. Scoring the Waymo L4 Spatial/Kinematic Self-Model
We illustrate the FCS metric by estimating the score of the spatial/kinematic self-models of the white-box Waymo L4 autonomous taxi based on the public description of the architecture [25]. To be able to count active variables and to estimate effective precision under noise and redundancy, an evaluator has to define the self-model boundaries and estimate a number of parameters. These decisions affect the outcome, so that we provide our final score with a wide confidence interval of roughly ± an order of magnitude. Even so, this is a grounded first attempt at quantifying functional consciousness on actual hardware. A capable Waymo system engineer could significantly tighten these estimates.
We estimate bits by multiplying ~40 self-model state variables () by an average depth () of ~14 bits of mutual information above noise level per variable.
The variables include:
- Kinematic Self-Model: 12 variables (Position ; Velocity ; Acceleration ; Angular rates ).
- Actuator Self-Model: 8 variables (Steering torque, braking pressure, wheel rotational speeds).
- Task/Trajectory Self-Model: ~20 variables (Active path spline parameters, distance-to-lane-center, time-to-arrival, collision buffers).
We calculate the reasoning power as the state-space expansion rate—the growth of the conclusion manifold during inference. Waymo uses Model Predictive Control (MPC) and Monte Carlo simulations for trajectory planning.
- Initial State (): 560 bits.
- Horizon (): The system simulates thousands of branched futures based on candidate actions and actor interactions.
- Expansion Factor: If the inference engine generates a probability distribution over distinguishable and reachable future states, the expansion rate is the bit-growth of this set.
Following Bialek et al. [6], for a parameter model with inference steps per cycle:
As a result, we get:
This score indicates that while a Waymo taxi has a detailed model of its physical self and future trajectories (R), its functional consciousness is limited by narrow reasoning in its specific domain. It lacks the cross-domain reasoning manifold expansion seen in biological agents.
6. Self-Model Evaluation Comparison Table
We evaluate selected self-models of contemporary systems against two human baseline self-models.
Figure 2.
Reasoning Power vs. Representational Capacity (from Table 1).

This list provides short descriptions of the selected systems, the type of self-models evaluated and some of the assumptions taken. Detailed evaluation reports are available in the companion repository [4].
- Map: A map exhibits very rich spatial data (high ), but has no reasoning power at all (). For the evaluation we have chosen an average municipal city map with ~1k geometric shapes with ~40 bit each.
- Stateless LLM: LLMs (Large Language Models) act as powerful reasoning engines with performance similar to humans. We estimate by applying Bialek scaling to the ~1,000 effectively attended tokens across ~100 Transformer layers. However, without persistent state, LLMs score zero in R and thus . This result is deliberate: FC measures self-modeling capacity, not raw intelligence. Each LLM forward pass is a fresh function evaluation with no access to prior inferences or internal state history. The dramatic leap to ~6.5M for Generative Agents (below) confirms that FC correctly identifies the agentic scaffold—memory, reflection, and persistent state—not the base model, as the locus of functional consciousness.
- LIDA Cognitive Architecture [12]: LIDA models the conscious cycle of Global Workspace Theory [2]. While it possesses numerous self-models, its representations are shallow () and its symbolic reasoning is limited to simple activation arithmetic (). Due to this combination, LIDA scores below the Roomba on its best single self-model. This aligns with its design as a theoretical show-case rather than a high-performance inference engine.
- Roomba with SLAM: These robots possess a basic spatial self-model but have limited reasoning power (P) [11].
- ACT-R: The ACT-R cognitive architecture models reasoning through a tightly constrained central bottleneck of buffers and production rules. We evaluate its declarative memory and active buffer system (the cognitive domain). Due to its utility-learning production selection, its reasoning power () out-scales LIDA’s activation arithmetic, though its tight working memory bottleneck limits its overall capacity ().
- Waymo L4: The Waymo possesses sophisticated spatial self- models with integrated uncertainty, health monitoring, and trajectory simulation. It exhibits cross-domain reasoning (e.g., correlating sensor reliability with trajectory planning).
- Generative Agents: Stanford’s “Smallville” agents [19] use a LLM with memory streams, reflection, and social interaction. They possess rich episodic and social self-models but lack embodiment. We score the episodic self-model, which includes the memory stream, reflection nodes, and retrieval system. Please note that the P score is lower than the stateless LLM, because the agent architecture acts as a bottleneck.
- Human (kinematic): We score the narrowly defined kinematic self-model, which literature estimates to have ~550 state variables (joint angles, actuator feedback, vestibular data). The reasoning power () reflects the cerebellum’s role as a predictive forward model for motor planning.
- Human (working mem.): Quantifying the human episodic/cognitive self-model requires strict boundary assumptions to remain tractable. Rather than scoring the entire lifetime store of autobiographical memory, we analyze the active working set engaged during a single episode of reflective reasoning. Drawing on cognitive science estimates of working memory and narrative reconstruction [10], we estimate actively maintained variables (perceptual features, social actors, causal links), with bits reflecting rich multi-modal content. The resulting reasoning power () reflects the massive parallelism of biological associative expansion and is comparable to a transformer LLM (). This aligns with the empirical observation that LLMs approach human-level reasoning depth.
The following table summarizes the benchmark results. The specific valuations are intended as order-of-magnitude estimates to illustrate the discriminatory power of the FCS metric. Rather than treating these numbers as definitive constants, the primary contribution here is the metric framework, which allows domain experts to derive precise measurements based on architectural details. Details for each evaluation are available in the companion repository [4].

Table 1.
System Self-Model Comparison Table
| ]@lrrrr@ System | B (v) | (bits/v) | P | FCS |
|---|---|---|---|---|
| Map | ~1k | ~40 | 0 | 0 |
| Stateless LLM | 0 | 0 | ~3,300 | 0 |
| LIDA (cognitive) | ~20 | ~4 | ~33 | ~2.6k |
| Roomba (kinematic) | ~18 | ~8 | ~39 | ~5.6k |
| ACT-R (cognitive) | ~20 | ~8 | ~50 | ~8.0k |
| Waymo (kinematic) | ~40 | ~14 | ~133 | ~74.5k |
| Gen. Agents (episodic) | ~130 | ~100 | ~497 | ~6.5M |
| Human (kinematic) | ~550 | ~10 | ~1,826 | ~10M |
| Human (working mem.) | ~330 | ~14 | ~3,000 | ~13.9M |
While some AI systems match human performance in narrow domains (e.g., an LLM’s raw reasoning power), they rarely combine high capacity and reasoning within a single self-model. Furthermore, the human mind integrates many such models across domains, leading to an exponential growth of FCS with the number of models.
7. Functional Self-Model Analysis (FSMA)
We could effectively conclude the paper here, having established self-models as new, quantifiable units of measure for AGI evaluation. However, to fulfill the promise of a universal metric, we must be able to benchmark complex black-box systems where internal variables are hidden. Without a behavioral inference tool, our core claim—that functional consciousness can be practically scored—would break down for advanced agents like LLMs or humans.
To bridge this gap, we introduce Functional Self-Model Analysis (FSMA), an abductive method that infers the presence and richness of self-models from behavioral evidence alone. The intuition is straightforward:
“If an agent’s output about an internal state changes because that state changes, the agent must possess a functional model of that state.”
FSMA thus analyzes the capacity of the producing system, not a text. This is analogous to functional data dependency [9] and abductive reasoning—inferring the necessary preconditions for an observed outcome.
7.1. The VAT Intuition
To illustrate this, consider an automated accounting system that calculates Value Added Tax (VAT) for international transactions. By law, the VAT rate depends on:
- The origin of the item.
- The destination of the item.
- The category of the item (e.g., food vs. services).
If the system consistently identifies the correct VAT across diverse invoices, we can abductively conclude that:
- 1.
- The system possesses data representing the origin, destination, and category.
- 2.
- The system possesses a functional mapping .
Whether this mapping is a lookup table, a hard-coded rule, or a latent neural vector is irrelevant to the functional analysis; its presence is a prerequisite for the observed behavior.
Definition 4 (Functional Self-Model Analysis, FSMA). FSMA identifies the minimal set of self-models required for a consistently produced observable output f:
Each self-model is defined as a tuple , where:
- (Data Domains): The specific areas represented (e.g., spatial, temporal).
- (Structural Form): The architecture of the representation (e.g., 3D scene graph, directed acyclic graph, attention map).
- (Operations): The functional capabilities enabled (e.g., simulation, prediction, counterfactual reflection).
Minimal refers to the model with the lowest representational capacity required to satisfy the observation. Identifying the absolute minimum helps decide between multiple candidate solutions. For example, consider this reflection from Virginia Woolf’s The Mark on the Wall:
“All the time I’m dressing up the figure of myself in my own mind, lovingly, stealthily…”
To generate this thought, an agent must possess an active episody-narrative self-model, but more importantly, it requires a concurrent meta-self-awareness model. The system is explicitly monitoring its own ongoing attempt to rewrite its internal parameters to optimize for positive affect (ego). The absolute minimal requirement to output this sentence is a dual-layered architecture: a primary model actively constructing a narrative identity, and a secondary attention mechanism observing that construction process in real-time.
8. Empirical Evaluation of FSMA
To test FSMA, we needed datasets rich in internal state references. While Descriptive Experience Sampling (DES) [15] catalogs human inner experience, many existing data-sets use restrictive categories. We instead turned to early 20th-century stream-of-consciousness literature. Though crafted for aesthetics, these texts offer high-density subjective flows. The core logic of FSMA still holds against the parroting or word-to-world fallacies: to repeatedly and consistently describe thoughts and perceptions as these authors do, the narrator must possess sophisticated underlying self-models.
We selected Virginia Woolf’s “The Mark on the Wall” [26] for its manageable length and dense meta-cognitive reflection. We present this analysis as a proof-of-concept. Choosing different base texts will naturally yield different catalogs of self-models, and we look forward to future scientific discourse comparing them. The annotated text is included in the companion repository [4].
8.1. The Self-Model Catalog
During our FSMA of “The Mark on the Wall”, we extracted all self-referential expressions to identify candidates for the minimal self-models required to generate them. This process yielded a comprehensive self-model catalog.
Through this fieldwork, we encountered the potential fallacies of Schleiermacher’s hermeneutic circle [23], which we navigated using two distinct modes of analysis:
- 1.
- Bottom-Up Analysis: An inductive process extracting self-model candidates directly from the text, grouped by shared data requirements.
- 2.
- Top-Down Analysis: A deductive validation of existing theoretical frameworks (e.g., a specific cognitive architecture) against the models identified in the text.
Bottom-up analysis reveals the inherent complexity of self- representation. For example, we initially identified overlapping models like a dual self (private vs. public) and a multi-faceted self (context-dependent identity). While philosophically interesting, these often function as special cases of broader Theory of Mind (ToM) or Narrative Self models. To maintain a lean, benchmark-ready catalog, we aggregate these into general categories based on functional similarity.
Top-down analysis risks confirmation bias: a predefined architecture may cause the investigator to detect only the models it already assumes. We address this by decoupling FSMA from any single catalog, allowing researchers to apply their own frameworks.
8.2. The SBR-Catalog of Self-Models
The following catalog results from a bottom-up FSMA of Woolf’s text, filtered through the lens of the Scene-Based Reasoning (SBR) cognitive architecture [5]. SBR details several first-order subsystems and assumes an attention subsystem [13] that can focus on both external objects and internal self-models.
The SBR-derived catalog consists of 46 self-models across ten functional areas (see the companion repository [4]):
- Body (5): body-3d, body-kinematic, body-sensor, body-actuator, body-energy.
- Spatial (4): spat-relative, spat-trajectory, spat-collision, spat-tool.
- Action/Planning (5): action-tree, action-perform, action-progress, action-plan, action-improv.
- Goal/Motivation (3): goal-tree, goal-reward, goal-conflict.
- Cognitive (5): episody, episody-narrative, episody-time, mem-avail, learn-rate.
- Informational/Knowledge (7): inf-know, inf-fresh, inf-creative, inf-consistency, inf-reasoning, inf-hypo, inf-confidence.
- Emotional/Affective (4): mood, mood-needs, mood-stress, mood-load.
- Social/Interaction (6): social-tom, social-role, social-comm-state, social-trust, social-influence, social-empathy.
- Meta/Reflexive (4): meta-attention, meta-self-awareness, meta-explain, meta-accuracy.
- Ethics/Safety (3): ethics, ethics-safety, ethics-drift.
Perception is excluded from this catalog as a first-order activity with several self-models monitoring the perceptual process (e.g., body-sensor for sensory limits). Awareness of perception is modeled as attention toward these self-models.
9. Benchmarking Agents with the SBR Self-Model Catalog
While previous sections focused on the numerical FC score of white-box agents with limited capabilities and detailed internal information available, here we benchmark biological and more complex AI systems. Inevitably, the precision of our evaluation will degrade even further, which will be reflected in the way we will visualize the results. Still, this is a major improvement to the previously available philosophical models, as it allows discourse using scientific tools.
Figure 3.
FSMA radar charts across 8 representative agent architectures. Each chart shows the qualitative cognitive shape (filled area) against the human baseline.
Figure 3.
FSMA radar charts across 8 representative agent architectures. Each chart shows the qualitative cognitive shape (filled area) against the human baseline.

9.1. Methodological Boundary
It is important to explicitly distinguish between the two methodologies used here. For white-box agents (e.g., Waymo, Roomba, ACT-R), we calculate the presence of self-models directly from their architectural specifications. However, for black-box systems (e.g., Generative Agents, LLMs, and humans), we must rely on functional self-model analysis to infer the minimal self-models required to produce their observable outputs. Despite the different methods, both approaches estimate the same underlying property: the informational richness of the agent’s internal state modeling and the associated reasoning power P.
9.2. Cognitive Shape
Extending the precise white-box FCS math () across all ten domains for every agent is impractical. Instead, we use a rapid approximation: mapping the presence and richness of self-models relative to a human baseline (normalized to 100%). Plotting these values on a radar chart reveals an agent’s cognitive shape. These charts represent conceptual breadth B rather than absolute, rigorous scores.
9.3. The Role of Global Reasoning (P)
While the cognitive shape reveals where an agent possesses self-models, its total functional consciousness depends heavily on the reasoning power (P) operating over those models.
As discussed earlier, P determines the scale of the state-space expansion. Even if local reasoning differs across models, the global reasoning engine is the same for all of them and acts as an exponential multiplier. This is visually demonstrated when comparing radar charts and FCS scores: two agents might possess a similar, broad cognitive shape (e.g., LIDA and Generative Agents both touch upon many domains), but because they operate at radically different P levels (legacy symbolic arithmetic vs. massively parallel neural inference), their resulting FC scores differ by three orders of magnitude. The shape shows the potential; the P-scale determines the actualized utility. For the detailed evaluation reports please see the companion repository [4].
10. Relation with Other Theories of Consciousness
Functional Consciousness (FC) is not proposed as a competing metaphysical account of phenomenal experience or the hard problem. Rather, FC isolates a functional layer of cognition: the capacity of a system to make internal states available for inspection, reasoning, and control. FC directly explains a measurable form of self-modeling and metacognitive access. It corresponds most closely to philosophical notions of access consciousness, contributes to architectural features emphasized by several major theories of consciousness [14], and leaves phenomenal experience explicitly outside its scope.
10.1. Integrated Information Theory (IIT)
Giulio Tononi’s IIT associates consciousness with integrated information () [24]. FC does not claim to reproduce IIT’s full formal framework, but it captures one of its central intuitions: that conscious systems must combine differentiated internal representations with integrated processing.
Within FC, differentiation corresponds to representational capacity (R), while integration appears in the extent to which reasoning power (P) depends on shared self-models spanning multiple subsystems. Building on this correspondence, we can define an engineering analogue of integration by measuring how much reasoning power is lost when shared self-models are partitioned:
Where:
- denotes the reasoning power of the integrated system.
- denotes the j-th subsystem operating with only local, non-shared self-models.
This does not establish equivalence with IIT’s , but provides a practical measure of how much integration depends on cross-linked internal models. Unlike IIT’s , which has been shown to be computationally intractable even for systems with known architecture [1], is directly computable for white-box systems where self-models can be identified from architectural specifications.
10.2. Higher-Order Theories
Higher-order theories (HOT/HOP) align most directly with functional consciousness. A mental state becomes conscious, in these accounts, when it becomes the target of another representational state [22]. Within functional consciousness, self-models () serve precisely this role: they encode internal states () in a form that can itself be processed by the reasoning system.
A state becomes functionally accessible when reasoning power (P) operates over its associated self-model (). Recursive structures such as the meta-attention self-model allow the system to monitor and regulate its own selection processes, creating the meta-reflective cascades characteristic of advanced cognition. In this sense, FC operationalizes a core mechanism emphasized by higher-order theories: internal states becoming objects of further internal cognition.
10.3. Workspace and Predictive Theories
Global Workspace Theory proposes that content becomes conscious when it is globally available across multiple cognitive processes [2]. FC contributes to this idea insofar as self-models make selected internal states available for reasoning across subsystems. However, FC uses attention and global reasoning instead of broadcasting, so it should be understood as compatible with, rather than equivalent to, workspace models.
Predictive Processing describes cognition as continuous prediction and error minimization. FC relates to this framework through its use of predictive information [6] in quantifying representational capacity (R): richer self-models encode more of the structure needed to anticipate future internal and external states. In this view, consciousness is the process of minimizing the prediction error of the agent’s own internal self-models.
10.4. Summary Position
Functional consciousness corresponds philosophically most closely to access consciousness: it makes internal information available as an object of further cognition. It contributes to broader theories wherever they rely on self-representation, integration, or recursive access.
This deep alignment with existing theories is what justifies naming the metric functional consciousness rather than a narrower term like self-reflexive reasoning.
11. Conclusions
This paper operationalizes key structural claims of several major consciousness theories—integrated information, higher-order representation, global availability, and predictive coding—within a single, empirically grounded metric. By setting aside the hard problem, functional consciousness gives engineers a graded behavioral measure for evaluating how well an agent models and reasons about its own internal states.
Our benchmarks span autonomous taxis, cognitive architectures, generative agents, and stream-of-consciousness literature. Five results stand out:
- 1.
- Self-models as units of analysis. Decomposing self-reflection into multiple, independently scorable self-models yields a practical taxonomy (46 models across ten domains) for comparing heterogeneous agents.
- 2.
- Metric clarity. The multiplicative structure enforces a discriminating boundary: a map with rich data but no reasoning () and a stateless LLM with powerful reasoning but no persistent self-model () both score zero—for opposite reasons. Functional consciousness requires both representation and inference.
- 3.
- Integration as exponential multiplier. When self-models are cross-linked, reasoning power grows as . This exponential explains the qualitative gap between narrow AI and biological consciousness as a difference in integration density, not in kind.
- 4.
- Theoretical convergence. FC captures measurable aspects of IIT (integration via shared self-models), higher-order theories (self-models as meta-representations), Global Workspace Theory (availability through attention), and Predictive Processing (state-space expansion as prediction). It identifies a functional substrate that these theories treat as necessary for conscious cognition, and makes it quantifiable.
- 5.
- Black-box benchmarking. FSMA provides a systematic, abductive method for inferring self-models from behavioral output, extending FC scoring to systems whose internals are unknown.
11.1. Outlook for AGI
As we advance toward Artificial General Intelligence (AGI), functional consciousness offers a crucial safety and evaluation tool. An agent that cannot accurately reason about its own capabilities, goals, and limitations is inherently unreliable. By measuring and optimizing for FC, we can engineer systems that are not only capable, but structurally transparent and self-aware.
To increase FC in future systems, we recommend building AI with inspectability in every subsystem and exposing the results to global reasoning via an attention filter.
References
- aronson, S. Why I Am Not An Integrated Information Theorist (or, The Unconscious Expander). Blog post. 2014. Available online: scottaaronson.com.
- aars, B. J. A Cognitive Theory of Consciousness; Cambridge University Press, 1988. [Google Scholar]
- ergmann, F.; et al. Workshop on Self-Reference and Self-Models for Cognitive Architectures; AGI-2015, 2015; Available online: http://www.fraber.de/university/self_models/.
- ergmann, F. GitHub repository. 2026. Available online: https://github.com/fraber/functional-consciousness.
- ergmann, F.; Fenton, B. Scene Based Reasoning. In Artificial General Intelligence; Springer, 2015; pp. 23–33. [Google Scholar]
- ialek, W.; Nemenman, I.; Tishby, N. Predictive Information, Memory, and Complexity. Physical Review E 2001, 63(5). [Google Scholar]
- lock, N. On a confusion about a function of consciousness. Behavioral and Brain Sciences 1995, 18(2), 227–247. [Google Scholar] [CrossRef]
- halmers, D. J. Facing up to the problem of consciousness. Journal of Consciousness Studies 1995, 2(3), 200–219. [Google Scholar]
- odd, E. F. A Relational Model of Data for Large Shared Data Banks. Communications of the ACM 1970, 13(6). [Google Scholar] [CrossRef]
- owan, N. The magical number 4 in short-term memory: A reconsideration of mental storage capacity. Behavioral and Brain Sciences 2001, 24(1), 87–114. [Google Scholar] [CrossRef] [PubMed]
- urrant-Whyte, H.; Bailey, T. Simultaneous Localisation and Mapping. In IEEE Robotics & Automation Magazine; 2006. [Google Scholar]
- ranklin, S.; et al. A LIDA cognitive model tutorial. In Biologically Inspired Cognitive Architectures; 2016; p. 16. [Google Scholar]
- raziano, M. S. A.; Webb, T. W. The attention schema theory. In Frontiers in Psychology; 2015. [Google Scholar]
- üzeldere, M. The many faces of consciousness. In The nature of consciousness; Block, N. J., et al., Eds.; 1997; pp. 1–67. [Google Scholar]
- urlburt, R. T. Investigating Pristine Inner Experience; Cambridge University Press, 2011. [Google Scholar]
- eCun, Y. “A Path Towards Autonomous Machine Intelligence”, Version 0.9.2. openreview.net 2022. [Google Scholar]
- etzinger, T. Being No One: The Self-Model Theory of Subjectivity; MIT Press, 2003. [Google Scholar]
- etzinger, T. The Elephant and the Blind; MIT Press, 2024. [Google Scholar]
- ark, J. S.; O’Brien, J. C.; Cai, C. J.; et al. Generative Agents: Interactive Simulacra of Human Behavior. In UIST 2023; 2023; Available online: https://arxiv.org/abs/2304.03442.
- remack, D.; Woodruff, G. Does the chimpanzee have a theory of mind? Behavioral and Brain Sciences 1978, 1(4), 515–526. [Google Scholar] [CrossRef]
- utnam, H. The nature of mental states. In Mind, language and reality; Cambridge University Press, 1975; Vol. 2. [Google Scholar]
- osenthal, D. M. Consciousness and Mind; Clarendon Press, 2005. [Google Scholar]
- chleiermacher, F. Hermeneutics and Criticism: And Other Writings; Cambridge University Press, 1998. [Google Scholar]
- ononi, G.; et al. Integrated information theory. In Nature Reviews Neuroscience; 2016; p. 17. [Google Scholar]
- aymo. Waymo’s Foundation Model. Waymo Technical Blog 2024.
- oolf, V. The Mark on the Wall. Monday or Tuesday: Eight Stories; Dover Publications, 1917. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



