Submitted:
27 March 2026
Posted:
30 March 2026
You are already at the latest version
Abstract
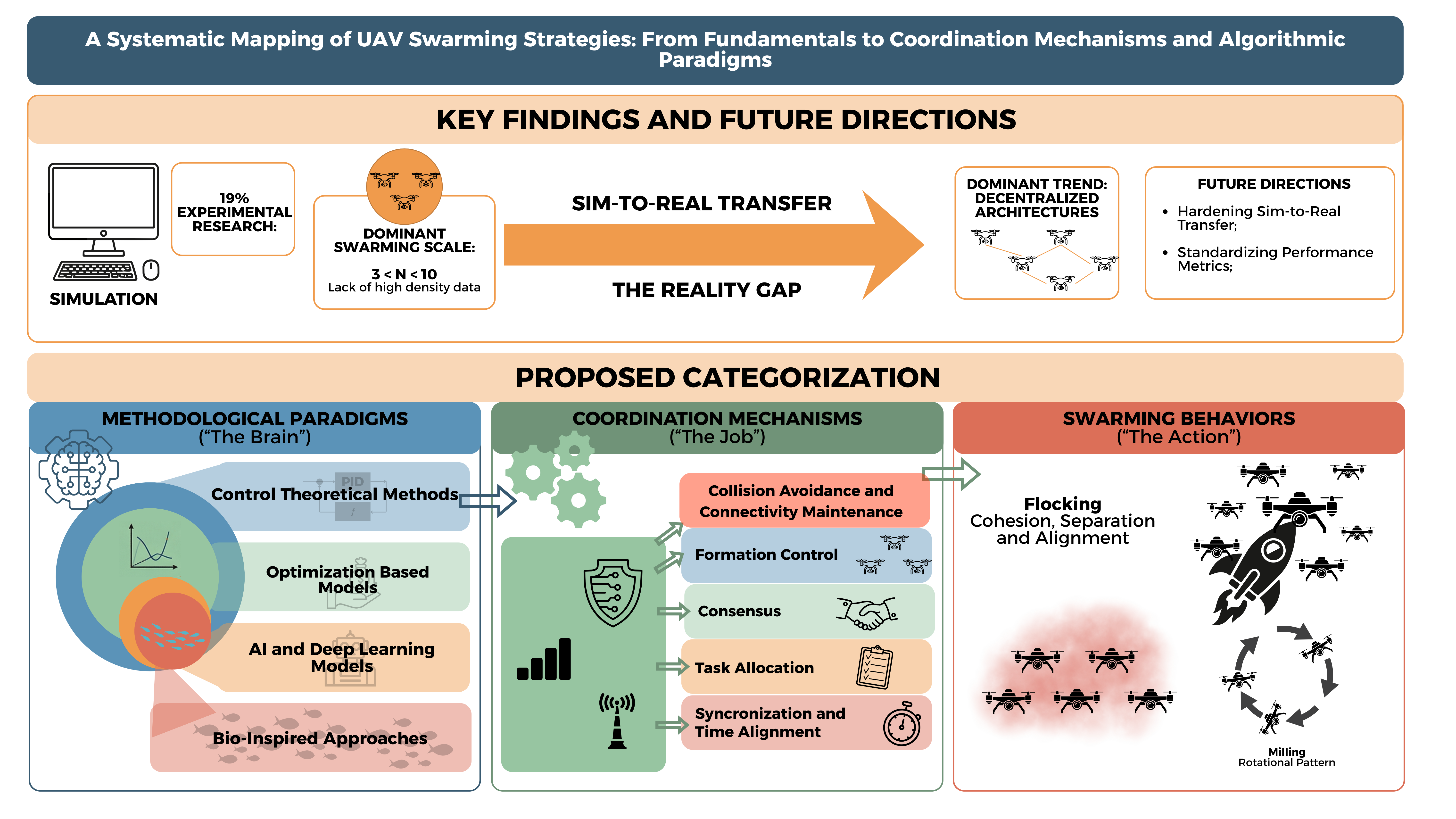
Uncrewed Aerial Vehicle (UAV) swarms represent a transformative paradigm for scalable and resilient mission execution, yet holistic literature bridging individual dynamics and collective intelligence remains scarce. This study conducts a systematic mapping of 146 peer-reviewed articles published between 2021 and 2025, providing a broad overview of the state-of-the-art concerning the core concepts and components of a UAV swarm, progressing from individual vehicle dynamics to fully coordinated and intelligent collectives. Quantitative results reveal a dominant shift toward decentralized architectures, with connectivity maintenance and collision avoidance prioritized as the primary functional domains. Methodologically, while control theory and optimization models form the field’s "deterministic spine," data-driven AI is rapidly emerging. Despite the widespread applications of UAV swarms in simulation, the analysis exposes a significant gap in the experimental application of these, with only 19% of the reviewed research indicating hardware implementation beyond numerical simulations, identifying critical research gaps in Sim-to-Real transfer and environmental robustness. Based on the aforementioned analysis of the peer-reviewed articles, the authors propose a novel multidimensional taxonomy categorized through three lenses - coordination mechanisms, algorithmic nature, and collective behaviours - aiming to provide a structured overview of the swarming paradigms in the literature.
Keywords:
Uncrewed Aerial Vehicles (UAV)
; UAV swarm
; Multi-UAV
; coordination mechanisms
; swarming approaches
; swarming behaviours
; multi-agent systems
; swarm intelligence
1. Introduction
Uncrewed Aerial Vehicles (UAVs) have become integral to modern technology, offering exceptional mobility, aerial reach, and operational flexibility [1,2] across a wide spectrum of applications, from civil infrastructure inspection and precision agriculture [3] to military reconnaissance and tactical deployment [4]. Their capacity to access remote or hazardous regions, collect real-time data, and adapt to dynamic conditions has propelled them to the forefront of autonomous systems research.
Extending beyond single-vehicle operations, the paradigm of drone swarms - cooperative networks of UAVs functioning under distributed intelligence and coordination - has emerged as a transformative advancement in aerial robotics. Such swarms leverage inter-vehicle communication, collective sensing, and joint decision-making to execute complex missions with improved scalability, robustness, and efficiency compared to isolated UAVs ([1,5,6]). These systems are especially applicable for tasks like coordinated mapping [7], distributed surveillance [4], disaster response [8], and adaptive logistics in contested environments [9].
Despite the promise of UAV swarms, several technical and operational challenges remain. Key among these are the design of scalable coordination and formation control algorithms, resilient inter-UAV communication structures, real-time collision avoidance in dynamic environments, and the integration of Artificial Intelligence (AI) to support autonomous adaptation under constrained energy and sensing resources [10]. Moreover, regulatory, safety, and interoperability issues introduce additional barriers for the deployment of aerial swarms at scale [11].
The current landscape of Uncrewed Aerial Vehicle (UAV) swarm research is characterized by a high volume of specialized literature. While recent contributions offer extensive and high-quality deep-dives into specific facets of the field, these surveys predominantly focus on technical niches or isolated operational domains. Specifically, an abundance of specialized reviews dedicate their scope exclusively to formation control and consensus implementations [2,12,13], while others concentrate strictly on trajectory design, path planning heuristics, and collision avoidance [5,14,15,16,17]. Similarly, a substantial body of literature isolates the application of specific computational paradigms, such as artificial intelligence and deep reinforcement learning [18,19,20], or addresses highly specialized subsystems and applications, including regulatory mission planning, task assignment, localization, and reliability assessment, [6,11,21,22,23].
Conversely, while broader surveys exist that attempt to capture the general landscape of swarm robotics or overarching UAV challenges [1,4,7,24,25], they often approach the topic from a macroscopic conceptual level encompassing terrestrial, aquatic, and aerial robots indiscriminately, or focus heavily on non-technical factors such as ethics and public perception rather than the underlying control engineering.
Consequently, there remains a critical need for an integrated, holistic synthesis that bridges these specialized technical niches and generalized overviews. The present work seeks to fill this gap by tracing the technological progression from individual vehicle dynamics to the emergence of fully coordinated aerial collectives. Rather than focusing on a single technical mechanism or providing a purely high-level summary, the authors propose a broad literature analysis on swarming paradigms and a multi-dimensional categorization framework, examining the field through three distinct lenses: coordination mechanisms, algorithmic nature, and collective behaviours; providing a structured, end-to-end mapping of swarming paradigms, as illustrated in Figure 1.
This paper is structured in five primary sections. After this Introduction, Section 2 details the review methodology, ensuring reproducibility and clarifying the selection criteria for the 146 articles analysed. Section 3 presents the analysis of the reviewed articles, namely regarding i) the foundations of UAV Swarm Robotics (SR), including biological inspirations and current applications, ii) environmental modelling, categorizing operational spaces by dimensionality, stability, and obstacle density, iii) core system components, including hardware platforms, sensing layers, and communication protocols, and iv) validation techniques, moving from numerical simulation to hardware experimentation.
The proposed swarming categorization is presented in Section 4, which is divided according to three critical lenses: i) coordination mechanisms; ii) methodological paradigms ranging from deterministic control to data-driven AI; and iii) swarming behaviours. Finally, Section 5 provides the conclusions of this review, summarizing the existing limitations and identifying critical future research directions for the deployment of resilient UAV swarms.
2. Review Methodology
Given the complexity and multidisciplinary nature of swarming strategies for UAVs, the literature revealed itself to be fragmented, with contributions dispersed across control theory, robotics, AI, communication systems and biological inspiration. As a result, a structured, integrative and reproducible review methodology becomes particularly valuable, aiming to provide a comprehensive reference that maps the conceptual landscape of the field.
To establish the thematic scope and conceptual framework of this review, a preliminary scoping phase was conducted in August 2025. This involved a systematic extraction of keywords from the ten most relevant publications indexed in Google Scholar under the search string “Swarming Strategies for UAVs”. To ensure the integration of latest advancements, a temporal filter was applied to restrict the selection to literature published between 2021 and 2025. This methodology aligns with established practices in recent UAV surveys, which utilize structured metadata analysis to define research boundaries and categorize emerging paradigms.
To ensure the review maintains a rigorous and well-defined scope within the vast field of aerial robotics, the selected keywords were systematically categorized into three thematic pillars: Control, Platform, and Swarm. This classification serves as a structural filter to ensure that the literature analysed resides strictly at the intersection of these three domains, as illustrated in the Venn diagram in Figure 2.
The Control category encompasses the intelligence of the system, including the specific algorithms and methodologies required for navigation, guidance, stability, and decision-making. By including this class, the review ensures an in-depth analysis of how UAVs process information to achieve autonomous and coordinated behaviour. Complementing this is the Platform pillar, which focuses on the physical and operational characteristics of the Uncrewed Aerial Vehicles. This domain covers hardware configurations, such as the distinction between multi-rotor and fixed-wing aircraft, as well as onboard sensors and physical constraints like energy capacity and payload. These considerations are vital to distinguish the research from purely theoretical studies or investigations into other vehicle types. Finally, the Swarm class addresses the collective dimension of the system, focusing on multi-agent interactions, decentralized communication, coordination protocols, and emergent behaviours like flocking or collaborative search.
By targeting only the studies where Control, Platform, and Swarm overlap, it was captured the true state-of-the-art in Autonomous Swarm Intelligence for UAVs (ASIU). This approach allows to ignore peripheral aspects of aerial robotics, such as isolated material science or manual remote-control missions, and focus on the specific challenges of coordinating intelligent, physically-constrained groups of drones.
To capture the multidimensional nature of the field, a systematic Boolean search string was constructed by applying the logical operator OR within each thematic category to maximize recall, and the AND operator between categories to ensure the intersection of all three domains was met. The specific keywords and their respective categorizations are detailed in Table 1, where the asterisk “*” means that a word or an expression does not require to appear isolated in the Boolean string.
After running a search on Google Scholar with the aforementioned parameters, the initial database search yielded a total of 997 records. To refine this set into a more representative dataset for analysis, a multi-stage screening process was illustrated in Figure 3:
- Title-Based Screening: An initial heuristic screening of titles was performed to remove duplicates and clearly out of scope entries. This phase resulted in 186 articles remaining for secondary screening.
- Abstract-Level Exclusion: The remaining articles underwent a detailed abstract review. During this stage, 40 articles were excluded for being out of scope.
- Final Selection: The final article poll selected for systematic analysis consists of 146 peer-reviewed articles, representing the current state-of-the-art in the field.
Following the final selection, a comprehensive data extraction matrix was developed to synthesize findings. To address the lack of uniformity in the literature, a normalization process was applied to some entries. This allowed for the transformation of disparate technical terms into standardized categories, facilitating a coherent quantitative analysis and the identification of global research trends.
2.1. Direct Results from the Bibliographic Selection
The word-cloud info-graphic presented in Figure 4 serves as a visual synthesis of the final article poll, illustrating the most significant thematic trends and technical terminology prevalent in contemporary literature.
The global distribution of the screened research articles, visualized in Figure 5, provides a comprehensive overview of the international landscape of UAV SR. This geographical analysis identifies key regions of high research output, with a notable concentration of publications originating from China, North America, and Europe. Such widespread dispersion across diverse institutional and geographical contexts ensures that the review incorporates a broad spectrum of technical methodologies, operational environments, and regulatory perspectives. Ultimately, this geographic data illustrates the regions where the most significant investment and scientific development in UAV swarm strategies are occurring. Rather than providing a definitive global validation, these findings highlight the primary technological hubs driving the current state-of-the-art, reflecting the concentrated nature of global research efforts in this domain.
2.2. Methodology Limitations
While significant efforts were made to ensure the representativeness and coherence of this study, certain limitations must be acknowledged to maintain transparency and facilitate an accurate interpretation of the findings.
The first limitation lies in the dependence on automatic selection via Boolean search strings. Although the combination of AND and OR operators was designed to maximize coverage, the process is highly sensitive to the terminology adopted by the original authors. There is a risk of “terminological silence,” where relevant articles using non-conventional or overly specific nomenclature may not have been captured by the initial search. Furthermore, indexing variations across digital databases can influence the visibility of certain studies.
A specific terminological emphasis was placed on the “Platform” pillar through the inclusion of terms such as “quadcopter,” while omitting specific fixed-wing or hybrid nomenclature in the primary search string. This choice was informed by the current research landscape, where multi-rotor platforms dominate the literature due to their hovering capabilities and agility in cluttered environments. As evidenced in Figure 12 in Section 3.3, multi-rotors account for the vast majority of identified swarm studies. However, this targeted approach introduces a potential limitation: by prioritizing quadrotor-centric keywords, the review may under-represent swarming strategies unique to fixed-wing or hybrid VTOL platforms, which operate under different kinematic constraints.
Another limitation to consider comes with the manual screening phase, which, while guided by a systematic protocol, carries an unavoidable component of subjectivity. Exclusion based on the review of titles and abstracts requires value judgments regarding what constitutes being “out of scope.” Although the intersection criteria between Control, Platform, and Swarm served as an anchor, the distinction between purely theoretical simulations and those with sufficient physical modelling for inclusion may vary depending on the reviewer’s interpretation, representing a potential selection bias.
Lastly, it should be noted that the research limits are defined by both the temporal scope and the reach of the consulted databases. This study focused on peer-reviewed articles published in English, which may exclude relevant contributions from “grey literature”, articles in other languages or scientific documents that are not materialized in a scientific publication. Additionally, the exclusive focus on the proposed thematic triad implies that isolated advances in adjacent areas, such as material science for UAVs or purely network-based communication protocols, were not the central focus unless they were integrated into a swarm control logic.
3. Analysis of Literature Review of UAV Swarms
This section provides the analysis of the literature review applied to the 146 articles result of the UAV swarm screening described in Section 2. The analysis aims to provide a holistic perspective of the field. Section 3.1 explores the foundations of UAV Swarm Robotics (SR), including biological inspirations and current applications. Environmental modelling is addressed in Section 3.2, which categorizes operational spaces by dimensionality, stability, and obstacle density. Section 3.3 examines the core system components, including hardware platforms, sensing layers, and communication protocols. Finally, Section 3.4 outlines current validation techniques, moving from numerical simulation to hardware experimentation.
3.1. Foundations and Multidisciplinary Applications of UAV Swarm Robotics
The field of SR represents a transformative paradigm in aerial systems, focusing on the coordination of multiple autonomous UAVs to achieve collective objectives that transcend the capabilities of a single agent [26]. A system is formally classified as a swarm if it consists of three or more autonomous entities that cooperate with minimal human intervention, emphasizing properties such as self-organization, robustness, and scalability [25,27]. This domain draws heavy inspiration from biological collectives, such as bird flocks and ant colonies, where sophisticated global behaviors emerge from simple local interactions [7,27].
Central to the implementation of these strategies is the command architecture, which is primarily divided into centralized and decentralized frameworks [14]. In a centralized control system, a single entity, such as a Ground Control Station (GCS) or an omniscient master UAV, collects global status information, computes optimal motion commands, and redistributes them to individual units [5,14]. While this approach simplifies decision-making and ensures consistency in collective action, it is inherently vulnerable to a single point of failure [13,28]. Furthermore, centralized architectures often suffer from the “curse of dimensionality,” where computational complexity and communication overhead grow exponentially as the number of UAVs increases [19,29]. To overcome these limitations, research has shifted toward decentralized and distributed systems (Figure 6), where each UAV makes autonomous decisions based on local sensory data and information exchanged only with immediate neighbours [29,30]. These distributed models are highly resilient; if individual agents fail or are destroyed, the remaining swarm can reconfigure its topology and maintain mission continuity [1,4]. Movement in these decentralized swarms is frequently governed by Reynolds’ rules, cohesion, separation, and alignment, which facilitate group unity while preventing reciprocal collisions [31,32].
A critical aspect of managing these systems is the scale of the swarm, defined by the total number of agents (N) [6]. Increasing the scale typically enhances situational awareness and coverage efficiency, as demonstrated in [33], whose data showed that target visibility increases significantly from N=3 to N=10 drones. However, larger swarms introduce significant coordination challenges, as the time required for the collective to reach a consensus or stable formation generally increases with the number of agents [29,30].
To balance the optimization of centralized systems with the robustness of decentralized ones, hybrid and hierarchical architectures have emerged [34,35]. These systems often utilize clustering techniques, where the swarm is partitioned into distinct groups coordinated by local cluster heads [28,34]. Such hierarchical models are essential for scalability, as they reduce message flooding and communication overhead by allowing the computational burden per agent to remain independent of the total swarm size [28,36]. Within these clusters, UAVs may take on heterogeneous roles, such as leaders, coordinators, or followers, to manage position assignment and conflict resolution more effectively [35]. The physical patterns adopted during various mission stages, such as schooling, swarming, and milling, further illustrate the impact of internal interaction rules on the collective’s ability to adapt to dynamic environments [32].
In summary, the operational effectiveness of an aerial swarm is fundamentally dictated by its underlying architecture and scale [6,14]. While architecture determines the logic of coordination and fault tolerance, the scale of the swarm (N) governs the complexity of communication and the speed of collective consensus [29,30]. These two “foundations” are the primary factors that differentiate swarm types, shifting them from simple small-scale formations to complex, resilient collectives capable of high-level autonomy [4,28].
3.1.1. Applications of UAV Swarms
The practical implementation of the principles of SR manifests in a diverse array of mission-critical applications. In the domain of search and rescue (SAR) and disaster management, swarms are deployed to patrol spatial areas that are often inaccessible or dangerous for human rescuers, such as dense forests or disaster sites [1]. In these scenarios, a fleet may be organized into specialized roles, such as explorers that identify alarm situations and healers that approach to resolve the emergency [37]. The redundancy inherent in a decentralized multi-UAV system is vital here; if a single UAV fails, the mission continues, which is crucial when time is of the essence [16]. Advanced sensing techniques like synthetic aperture sensing allow these swarms to detect and track occluded targets, such as missing persons under dense forest canopies, by computationally combining data from multiple drones to mimic a much larger sensor aperture [33]. Statistical evaluations of such systems show that a swarm of ten drones can reach a maximum target visibility of 72% within seconds by autonomously converging over gaps in vegetation [33].
Environmental preservation and hazard mitigation further leverage the decentralized nature of swarms through wildfire monitoring and tracking. As wildfires occur in remote areas with limited communication infrastructure, UAV swarms are utilized to scout fire locations using thermal imaging and provide on-demand monitoring faster than satellite or manned aircraft [38]. A robust framework for this involves distributed navigation strategies that allow the swarm to maintain a circular formation around a moving fire spot even in the presence of unknown wind disturbances [39]. To address the high energy demands of these long-term missions, some strategies incorporate bio-inspired clustering, such as the grey wolf optimizer (GWO), to manage network topology and minimize the number of transmissions, thereby extending the overall network lifetime [38].
In the sector of precision agriculture, also known as AgriFood 4.0, swarms revolutionize cultivation through coordinated seeding, spraying, and health surveys [22]. Unlike traditional single-UAV spraying, a swarm can cover vast farmlands in minutes, executing tasks like autonomous weed detection and mapping [3]. For seeding, swarms utilize visual collaborative navigation to identify and reseed areas that were initially missed, optimizing resource usage across irregular-shaped fields. Furthermore, swarms assist in crop yield estimation by capturing images from multiple perspectives, which facilitates 3D reconstruction and accurate fruit counts [3]. To maintain these intensive operations, researchers explore the use of mobile charging stations to periodically replenish the drones, ensuring a persistent presence in the field [22].
Military and tactical applications demand the highest levels of autonomy and adversarial coordination. Swarms are increasingly applied in aerial reconnaissance, electronic warfare, and precision strikes, as they can saturate enemy air defences more effectively than single platforms [40]. Large-scale programs like Offensive Swarm-Enabled Tactics (OFFSET) demonstrate the feasibility of releasing hundreds of semi-autonomous drones to perform reconnaissance or interference tasks without direct human piloting [25]. In combat environments, these swarms may employ predator-prey models, inspired by Harris’s hawk hunting patterns, to inform attack and defence strategies against dynamic intruders [41]. The integration of distributed model predictive control (DMPC) allows for real-time trajectory adjustment in cluttered urban battlefields, where drones must avoid obstacles like skyscrapers while maintaining mission-critical formations [30].
The evolution of infrastructure inspection and logistics applies swarms to the autonomous monitoring of large-scale structures and the delivery of essential goods. Drones equipped with sensors are used to preserve the structural integrity of major bridges by collecting data from embedded Internet of Things (IoT) sensors [42]. In the logistics realm, collaborative routing and distributed cargo strategies allow a group of drones to deliver heavy loads more agily than a single large aircraft [43]. These systems rely on decentralized communication paradigms to collaborate in real-time based on the current state of the environment and neighbour locations [18].
Finally, in smart cities, these swarms also serve as active connectivity enablers, acting as mobile base stations to restore communication networks in disaster areas where ground infrastructure has been destroyed [42].
3.1.2. Statistical Distribution of Command Architectures and Swarm Scale
Quantitative analysis of the selected research article poll reveals a clear and systematic shift in command and coordination paradigms for UAV swarms, with decentralized and distributed architectures emerging as the dominant approach [2] . As illustrated in Figure 6, the majority of the 146 reviewed publications adopt decentralized frameworks, reflecting a growing consensus that local decision-making and peer-to-peer interaction are essential to achieve scalability, fault tolerance, and adaptability in large multi-agent systems [1,14]. This trend is consistent with the increasing emphasis on robustness against single points of failure, particularly in safety-critical and communication-constrained environments [4,29].
Nevertheless, the prevalence of decentralized approaches in the literature should not be interpreted as unequivocal evidence of their universal superiority. Centralized and semi-centralized architectures remain prominent in application scenarios that require tight global coordination, such as communication-intensive search-and-rescue missions or formation-critical inspection tasks [5]. In these cases, centralized control enables globally optimal task allocation and trajectory planning [3,21], albeit at the cost of increased communication overhead and vulnerability to node failures [2,44]. The article poll therefore does not reflect a replacement for centralized paradigms scalability and resilience outweigh global optimality [5,45].
A closer examination of the operational scale reveals a notable disparity between the swarm sizes predominantly addressed in the literature and those theoretically envisioned for large-scale deployment. As shown in Figure 7, the majority of the reviewed studies that provide a specified number of UAVs in the swarm concentrate on small-scale swarms with agent counts in the range , as can be seen in Figure. This concentration is consistent with the well-known logistical, financial, and regulatory challenges associated with deploying and coordinating larger fleets of UAVs, including airspace constraints, inter-vehicle interference, and system-level safety considerations [24]. As a result, many reported performance metrics, such as convergence behaviour, formation maintenance, and collision avoidance, are primarily characterized within low-density swarm configurations, where interaction complexity remains limited.
By contrast, the subset of works addressing swarms with agents represents a significantly smaller portion of the article poll. These studies primarily explore scalability at a conceptual or algorithmic level, focusing on emergent collective behaviour, communication load, and coordination strategies as swarm size increases. While such analyses are essential for understanding theoretical limits and design trends, their applicability to real-world deployments may depend strongly on assumptions regarding sensing fidelity, communication reliability, and agent homogeneity [4]. This contrast highlights a structural imbalance in the literature, where the exploration of large-scale swarm behaviour is less frequently supported by conditions representative of operational environments.
Importantly, the suggests that scalability challenges are not solely a function of agent count, but emerge from the interaction between swarm density, communication topology, and control coupling [2,10]. As swarm size increases, maintaining coherent collective behaviour requires increasingly sophisticated coordination strategies that balance local autonomy with selective information sharing. Hierarchical and clustered architectures appear in the literature as pragmatic compromises, aiming to mitigate communication saturation while preserving the robustness of distributed decision-making [28,34]. However, these hybrid solutions reintroduce partial centralization and raise new challenges related to cluster-head selection, failure recovery, and dynamic role reassignment, issues that remain insufficiently explored in experimental settings [46,47].
Overall, the observed research trends indicate a maturing field that has largely converged on decentralized principles at the architectural level, while still grappling with the practical implications of scaling from laboratory-scale demonstrations to real-world, high-density deployments [37]. The dominance of decentralized frameworks in the article poll reflects both genuine conceptual advances and the practical limitations of experimental validation.
3.2. Environment Complexity
The environment in which UAV swarms operate is a primary determinant of mission complexity, significantly influencing the design of path planning, coordination, and collision avoidance strategies [1]. A fundamental distinction in environmental modeling is the dimensionality of the workspace, typically divided into two-dimensional (2D) and three-dimensional (3D) representations [16]. Many studies simplify the UAV flight model to a 2D plane by assuming that the collective operates at a constant, fixed altitude, which effectively removes the vertical axis from consideration to reduce computational and state-space complexity [16,19]. However, real-world aerial missions, such as those in urban canyons, dense forests, or mountainous regions, are inherently 3D, requiring the management of height-variant obstacles and complex manoeuvrers like climbing and descending [16,30,48]. Transitioning to 3D increases the degrees of freedom and the complexity of the collision avoidance problem, often requiring advanced spatial partitioning techniques to manage the volume of data [30]. Furthermore, some researchers adopt a 4D path planning approach, which incorporates the time dimension into 3D coordinates to ensure collision-free trajectories in highly dynamic settings where objects move and change the environment geometry over time [16].
The stability of environmental features over time further categorizes mission spaces into static or dynamic environments. Static environments consist of stationary obstacles, such as buildings and terrain, where global path optimization can often be conducted offline before the mission commences [16]. In contrast, dynamic environments involve moving entities like other aircraft, ground vehicles, birds, or pedestrians, which demand continuous real-time perception and rapid trajectory replanning as initial solutions may become invalid within moments [5,49,50,51]. The density and clutter of obstacles within the mission space significantly impact the visibility of targets and the probability of mission completion [30,50]. Densely cluttered environments, such as forest canopies or post-disaster indoor sites, restrict the available flight volume and can lead to Global Navigation Satellite System (GNSS)-denied conditions, forcing the swarm to rely on relative localization and vision-based navigation [50,52]. To ensure formation integrity in these spaces, researchers employ robust collision avoidance mechanisms that prioritize safety as the obstacle density increases [5,30].
Modeling these environments often involves discretizing the space into grid-based occupancy maps or using geometric primitives, such as cylinders or spheres, to facilitate high-speed distance calculations [30,50]. Advanced simulations may employ procedural generation to create complex 3D terrains with randomized features like concave crevices or “traps” that test the swarm’s robustness and its ability to escape local minima [50,53]. Beyond physical barriers, the operational environment includes aerodynamic and natural disturbances that can degrade performance [50]. Wind gusts and turbulence are persistent factors that increase energy consumption and can destabilize flight if the control system lacks adequate disturbance rejection capabilities [50,54]. Additionally, swarms flying in close proximity are subject to downwash effects, where the air column from a leading drone disrupts the stability of trailing units, potentially leading to a loss of control or collisions [32,50,55]. In adverse environments, swarms must also navigate through “denied” areas where they face electrical disruptions, communication breakdowns, or targeted attacks that can trigger cascading failures across the collective [56].
In conclusion, the operational environment acts as a fundamental constraint that dictates the necessary sophistication of a swarm’s navigation and coordination logic. Whether a mission is executed in a simplified 2D plane or a complex, time-variant 4D workspace, the interplay between obstacle density, dynamic threats, and aerodynamic disturbances, such as wind gusts and downwash effects, determines the boundary between mission success and system failure. Ultimately, the transition from static, controlled settings to cluttered, adversarial, or GNSS-denied environments is a key factor that differentiates the level of autonomy and resilience required for a specific swarm deployment.
3.2.1. Characterization of Operational Environments and Obstacle Complexity
The statistical analysis of environmental characteristics across the selected article pool reveals clear modelling preferences that directly shape how swarm coordination, planning, and safety mechanisms are formulated. As illustrated in Figure 8, a strong dominance of three-dimensional (3D) environment representations is observed, accounting for the majority of studies, while two-dimensional (2D) formulations represent a smaller but still significant subset [16]. This prevalence reflects an increasing recognition that realistic UAV operations inherently require full spatial modeling, particularly in applications involving urban environments, natural terrain, or obstacle-rich airspaces [57]. Nevertheless, the continued presence of 2D abstractions indicates that computational tractability and analytical clarity remain influential factors, especially in early-stage algorithm development or theoretical validation [45].
Importantly, the frequent adoption of 3D models does not necessarily imply uniform environmental realism. Many 3D formulations still rely on simplified obstacle geometries or constrained altitude bands, effectively reducing vertical manoeuvring freedom [16]. This suggests that while dimensionality has expanded, the complexity of vertical interaction and multi-layer airspace management remains only partially explored [32,55]. Consequently, the literature reflects a transition toward spatial realism that is still bounded by practical modelling compromises.
Figure 9 highlights a relatively balanced distribution between static and dynamic environments, with dynamic scenarios forming a substantial portion of the analysed works. This trend underscores a growing emphasis on adaptability and real-time responsiveness in swarm control strategies, particularly for missions involving moving obstacles, evolving targets, or time-varying constraints [5,26]. However, the coexistence of static-environment studies suggests that offline planning and deterministic optimization continue to play a role, especially when the objective is to benchmark coordination strategies or isolate specific swarm behaviours without confounding temporal variability [45].
Notably, a 13% fraction of studies incorporates both static and dynamic elements, reflecting hybrid modelling approaches where fixed environmental structures coexist with mobile agents or disturbances [50]. While such formulations more closely approximate operational conditions, they also expose a methodological tension: algorithms optimized for static guarantees often degrade when dynamic elements are introduced, highlighting the limited transferability of some planning and collision-avoidance strategies across environmental regimes [31].
The obstacle density analysis shown in Figure 10 further reveals a pronounced skew toward high-density environments. This emphasis aligns with the perception that SR offers the greatest advantages in cluttered, constrained spaces where redundancy, parallel sensing, and distributed decision-making can outperform single-agent solutions [33]. At the same time, the comparatively smaller representation of low-density environments suggests that open-space coordination problems, despite their relevance for long-range surveillance or monitoring, are less frequently explored in swarm-specific contexts. This focus on dense environments, however, introduces an implicit bias in algorithm evaluation. High-density scenarios tend to amplify collision-avoidance behaviour and local interaction rules, often at the expense of long-horizon optimality or energy efficiency [5]. As a result, swarm strategies validated primarily under dense conditions may over-prioritize reactive safety mechanisms, potentially limiting performance in sparse or mixed-density environments where global coordination and efficiency become dominant concerns [30].
Collectively, these trends indicate that the current literature prioritizes spatial realism, environmental dynamism, and obstacle-rich conditions, reflecting the domains where SR is perceived to offer the strongest advantages. At the same time, the uneven distribution across dimensionality, environmental stability, and obstacle density highlights open challenges in developing coordination frameworks that remain robust across heterogeneous operational contexts[1]. Bridging these gaps will require systematic evaluation of swarm strategies under varying environmental assumptions, rather than optimization within narrowly defined scenario classes[50].
3.3. Core Components of Swarm Systems
The successful implementation of a swarming strategy relies on the synergistic integration of four backbones: vehicle platforms, sensing layers, communication protocols, and control systems. These components allow individual agents to perceive their environment, share state information, and execute precise manoeuvrers to maintain formation and achieve mission goals [1,4].
The physical characteristics of the agents dictate the swarm’s operational envelope, with the literature predominantly focusing on multi-rotor platforms, specifically quadrotors (4 rotors), due to their omnidirectional manoeuvrability, hovering capability, and vertical take-off and landing (VTOL) utility [52,58]. These are ideal for cluttered environments where agility is paramount, ranging from small commercial drones for indoor swarm experimentation [43,47] to larger frames for outdoor payload transport [59]. Conversely, fixed-wing UAVs are extensively studied for missions requiring long-endurance and high-speed coverage, often employing constant-speed kinematic models like Dubins vehicles [34,60]. Emerging research also utilizes hybrid VTOL configurations to bridge the gap between the hovering flexibility of rotors and the aerodynamic efficiency of fixed wings, particularly for complex missions like forest fire monitoring [54].
Sensors provide the necessary state estimation and environmental awareness required for intra-swarm coordination and collision avoidance. Red-Green-Blue (RGB)/optical Cameras serve as the primary exteroceptive sensors, facilitating visual odometry, object detection (e.g., using You only look once (YOLO)), and formation tracking in GNSS-denied environments [8,18,23]. For specific profiles such as SAR and wildfire monitoring, thermal/infrared sensors are essential for detecting heat signatures like victims or fire fronts [33,54,61]. While GNSS remains the standard for outdoor global positioning and trajectory alignment [61,62], reliance on it is minimized in resilient designs. Instead, swarms utilize Ultra-Wideband (UWB) technology for centimetre-level relative ranging and communication in GNSS-denied areas, enabling tight formations without reliance on external infrastructure [52,63,64].
Internal state estimation is driven by the Inertial Measurement Unit (IMU), a critical sensor found in all flight controllers that provides high-frequency acceleration and angular rate data for attitude stabilization [65,66,67]. For high-precision 3D reconstruction tasks such as Simultaneous Localization and Mapping (SLAM) and obstacle detection, Light Detection and Ranging (LiDAR) is frequently utilized, particularly in complex urban or forest environments [18,50,52]. Radio Frequency (RF) transceivers are employed beyond standard data links for Received Signal Strength Indicator (RSSI) based tracking and direction finding [10,68]. In low-cost or indoor platforms, ultrasonic sensors are used for low-altitude terrain following and short-range obstacle avoidance [69,70]. Furthermore, Microphones are integrated for acoustic source localization [7,36], radar is employed for long-range detection in low-visibility conditions [8,17], and Automatic Dependent Surveillance-Broadcast (ADS-B) is critical for integrating swarms into national airspace to avoid cooperative manned aircraft [17].
Effective communication protocols govern data transmission and route establishment in the dynamic Flying Ad-Hoc Network (FANET) environment [24]. At the physical and data link layers, Wi-Fi is commonly adopted for high-bandwidth inter-agent communication in experimental studies [12,71]. For applications requiring low power and long range (LoRa), LoRa are used to exchange small state packets [72]. Cellular (4G/5G) protocols are increasingly integrated for wide-area coverage, supporting ultra-reliable low-latency communication (URLLC) [22,26]. To manage channel access, Medium Access Control (MAC) protocols such as Time Division Multiple Access (TDMA) are used for collision-free transmission in safety-critical formations, while Carrier Sense Multiple Access with Collision Avoidance (CSMA/CA) is used for flexible, contention-based access [4,45]. Routing protocols are essential for managing dynamic topologies; proactive protocols like Optimized Link State Routing (OLSR) maintain up-to-date tables, whereas reactive protocols like Ad hoc On-Demand Distance Vector (AODV) discover routes on demand to save bandwidth [38]. Additionally, flooding combined with Random Network Coding (RNC) is proposed for robust data dissemination in lossy networks [71].
Finally, while swarm algorithms handle high-level logic, low-level controllers execute the physical manoeuvrers (attitude and thrust). Proportional-Integrative-Derivative (PID) strategies remains the industry standard for inner-loop attitude control due to its simplicity [65,73,74]. Sliding Mode Control (SMC) is favoured for its robustness in rejecting external disturbances such as wind gusts [58,67,75]. Model Predictive Control (MPC) is utilized for its ability to anticipate future states and handle constraints, making it suitable for collision avoidance and trajectory tracking [30,35,72]. For swarms with varying payloads or unknown dynamics, Adaptive Control (e.g., Model Reference Adaptive Control (MRAC)) allows real-time parameter adjustment to ensure stability [46,65,76], while Geometric Control on 3D Euclidean Space is employed to avoid singularities during aggressive manoeuvrers [8,77].
3.3.1. Analysis of Sensor Integration and Platform Preferences
The distribution of sensors across various UAV swarm systems is shown in the following table. It highlights the most commonly used sensors and their frequency in literature, providing insights into current trends in swarm system design.
The sensor and platform distributions highlighted in Figure 11 and Figure 12 provide useful insights into the prevailing trends in UAV swarm systems. A major takeaway is the over-representation of RGB/optical cameras relative to more fundamental sensors like IMUs, which are essential for attitude stabilization and control in UAVs. Despite IMUs being present in all flight controllers, the literature reflects a greater emphasis on visual sensing for tasks such as object detection and formation tracking, likely due to the increasing reliance on autonomous perception-based control [33,78]. This bias towards RGB cameras may overshadow the need for more robust flight control sensors and raises questions about the focus of current research, which seems to prioritize autonomy and perception over fundamental flight stabilization.
Interestingly, the scarcity of thermal/infrared sensors, appearing in only a few studies, is aligned with the specialized nature of their applications, such as SAR or wildfire monitoring [8,54]. However, this limited use could also reflect a narrow focus on more general-purpose UAV swarm systems that don’t typically encounter such specific environmental challenges.
Furthermore, the dominance of communication technologies like RF Transceivers and UWB emphasizes their role in ensuring precise inter-agent communication and positioning in GNSS-denied environments [64,72]. While these technologies are vital for maintaining tight formations, the limited use of radar and microphones suggests that the swarm community is more focused on short-range, low-latency communication and visual sensing rather than exploring long-range detection or acoustic source localization.
3.4. Validation Techniques
Validation constitutes a critical phase in the development of UAV swarms, ensuring that theoretical coordination and control algorithms translate effectively to real-world operations. The necessity of this phase stems from the “Reality Gap” - the inherent discrepancy between simulated behaviours and actual physics, such as complex aerodynamics, battery discharge characteristics, and communication latency [37,65]. To systematically bridge this gap, the literature establishes a tiered approach to validation, which progresses from numerical simulations to high-fidelity physics environments and, ultimately, physical hardware experimentation [50,65].
Due to the significant costs, regulatory constraints, and collision risks inherent in physical drone deployments, simulation remains the primary method for validating complex swarm behaviours [50]. Numerical and mathematical tools such as MATLAB and Simulink are the most prevalent for verifying control logic, stability analysis, and trajectory generation before any physical deployment [48,50]. These environments can also be used to run Monte Carlo simulations, aiming to estimate probabilistic distribution characteristics and validate path planning under high uncertainty [14], critical for effectively managing a UAV swarm. They also serve as the benchmark for testing specific algorithms like IAPF and consensus protocols, enabling detailed analysis of collision frequency and formation convergence times [79,80].
As a way to start bridging the gap between abstract theory and physical reality, researchers utilize high-fidelity physics engines such as Gazebo in conjunction with the Robot Operating System (ROS) [58,81]. This integrated setup enables Software-in-the-Loop (SITL) testing, where the swarm’s actual flight code is executed within a virtual world that simulates rigid body physics, sensor noise, and environmental factors [50]. Furthermore, platforms like AirSim provide photorealistic rendering suitable for vision-based algorithms such as object detection and visual formation control through deep reinforcement learning [19]. Similarly, Unity and its associated ML-Agents toolkit are utilized to develop complex visual scenes for training reinforcement learning agents before policy transfer to physical platforms [82].
Emerging hybrid validation methodologies further enhance swarm robustness. Hardware-in-the-Loop (HITL) simulations run control algorithms on physical embedded hardware while vehicle dynamics and environments remain simulated, validating computational feasibility on resource-constrained devices [56]. Sim-to-Real techniques utilize domain randomization during simulation-based training to ensure that learned policies generalize effectively to real flight conditions without extensive fine-tuning [65,82]. Additionally, Digital Twin technology creates a synchronized virtual replica of the physical swarm, allowing for real-time parallel processing to predict system behavior and validate critical decisions before they are executed by physical agents [81].
Physical experimentation provides the ultimate validation for autonomous systems. Micro-UAV platforms dominate indoor swarm research due to their small mass, open-source firmware, and inherent safety [83]. These platforms are frequently utilized to test collision avoidance and formation control in high-density environments [25]. For larger-scale or vision-based studies, integrated commercial-off-the-shelf (COTS) platforms serve to validate Sim-to-Real transfer capabilities, whereas custom-built quadrotors utilizing advanced modular autopilots facilitate outdoor validation of payload capacity and environmental robustness [72,82,84]. Additionally, in outdoor or GPS-denied scenarios, positions estimated from UWB sensors or Real-Time Kinematic (RTK) GNSS receivers are compared against established baselines to measure drift and precision [69,72].
The validation schemes analysed in Figure 13 highlight a structural reliance on virtual environments, with Simulation accounting for 62% of the reviewed studies. This high percentage is a direct consequence of the logistical, financial, and regulatory barriers associated with large-scale physical drone deployments, particularly regarding the risk of mid-air collisions. Only 18% of the literature incorporates a combination of Hardware and Simulation, a tiered approach that is essential for bridging the aforementioned reality gap caused by complex aerodynamics and communication latency. The remaining 19% of entries marked as N/A represent theoretical frameworks or systematic reviews that do not include a dedicated validation phase. These trends suggest that while high-fidelity physics engines have become sophisticated enough to verify flight code via SITL testing, physical experimentation remains a scarce validation technique in the development of UAV swarms, despite its relative importance in guaranteeing sucessfull swarm deployment.
4. Categorization of Swarming Paradigms: Coordination Mechanisms, Algorithms, and Behaviours
Having performed the analysis of the considered literature in the previous sections, it is of crucial importance to understand how the transition from isolated aerial units to a unified, autonomous collective is made, as it requires a hierarchy of logic, function, and observable motion. For such end, this section proposes a multidimensional taxonomy designed to categorize the 146 reviewed articles based on their conceptual and operational contributions. By systematizing these strategies, one can move beyond simple platform descriptions to address the underlying paradigms that enable swarm resilience, scalability, and self-organization.
The proposed taxonomy is structured around three critical components that define the operational life cycle of a swarm:
- The Coordination Mechanism (the “Job”): these are the functional requirements or mission tasks, which serve as the algorithmic core of swarm intelligence.
- The Methodological Paradigm (the “Brain”): this represents the algorithmic nature and decision-making logic, ranging from deterministic control theory to data-driven AI that dictates how individual agents process environmental data and neighbour information.
- The Collective Behaviour (the “Action”): this describes the emergence of observable physical patterns, where programmed or emergent local rules interact to produce a cohesive global state.
By understanding the interplay between these levels and classifying research through these lenses, one can more effectively identify robust solutions.
In the article poll, a cross-referencing analysis was conducted between the identified coordination mechanisms and the algorithmic nature of the swarming strategies, as detailed in Table 2. This multidimensional mapping is critical as it reveals the “Methodological-Functional” alignment within the field; it identifies which mathematical paradigms are most effective for specific operational tasks, such as using deterministic control for high-precision formation maintenance versus employing data-driven AI to navigate the uncertainties of dynamic collision avoidance. By correlating these two lenses, the review highlights current technical matures and exposes gaps where certain algorithms have yet to be fully exploited for complex coordination roles.
4.1. Categorization of Coordination Mechanisms in Multi-Agent Systems
Coordination mechanisms constitute the algorithmic core of swarm intelligence, enabling a multitude of autonomous agents to transcend individual limitations and exhibit coherent global behaviours through local interactions [1]. Based on the systematic mapping conducted in this study, it is propose a taxonomy that organizes these mechanisms into five distinct functional domains, each addressing a specific operational requirement. While consensus algorithms focus on reaching a unified agreement on shared internal states (e.g., position or heading), task allocation involves the strategic distribution of objectives among agents to optimize overall mission efficiency. Formation control governs the spatial geometry and relative positioning of the vehicles during flight, whereas synchronization and time alignment ensure that coordinated actions occur within a precise temporal framework. Finally, the dual requirements of connectivity maintenance and collision avoidance serve as the foundational safety envelope, preserving the communication network while preventing physical impacts within the group.
The consensus provides the theoretical and mathematical framework for distributed agents to reach agreement on shared information states, such as position, heading, velocity, or time, which is fundamental for cooperative control [93]. In the context of UAV swarms, consensus protocols are typically modeled using algebraic graph theory, where the interaction topology is represented by a Laplacian matrix, and convergence depends on the algebraic connectivity of the network graph [2]. Recent advancements have focused on displacement-based consensus, where agents update their states based on the relative state measurements of their neighbors rather than absolute global data [12]. To address the slow convergence rates in large-scale ad hoc networks, researchers have developed acceleration schemes for distributed consensus time synchronization, utilizing extrapolation methods to predict and align state vectors faster than traditional asymptotic methods [91]. Furthermore, consensus frameworks have evolved to support field-based computing, such as the MacroSwarm framework, which uses resilient aggregate computing blocks to allow swarms to converge on target values or mission parameters despite high node mobility and potential message loss [37].
Efficient task allocation is the process of optimizing the swarm’s performance by distributing specific roles, targets, or sub-missions among heterogeneous or homogeneous agents [14]. This mechanism is critical for maximizing collective utility while accounting for individual agent constraints, such as energy levels, sensor capabilities and payload types. Algorithms inspired by biological phenomena, such as Wolf Pack Hunting [139], are prominent; in these models, agents dynamically switch roles based on guiding factors derived from individual-environment interactions, allowing the swarm to seamlessly transition between searching and attacking phases without central command [45,139]. The allocation problem is frequently modeled as a Multiple Traveling Salesman Problem (MTSP) solved via metaheuristics like Particle Swarm Optimization (PSO) to navigate the vast solution space [5]. For area coverage, the environment can be discretized, and allocation treated as a Distributed Constraint Optimization Problem (DCOP), balancing coverage maximization with communication overhead [60]. Additionally, Multi-Agent Reinforcement Learning (MARL) is increasingly used for dynamic environments, such as edge computing offloading, where UAVs learn policies to maximize data throughput and minimize latency by treating task assignment as a cooperative game [128,140].
Formation control focuses on maintaining a specific geometric configuration among agents during motion to ensure coverage, connectivity, or aerodynamic efficiency [13]. Strategies are broadly classified into leader-follower, virtual structure, and behavior-based approaches. The leader-follower topology is the most prevalent, where follower UAVs track the trajectory of a designated leader; to mitigate the risk of a single point of failure, adaptive hybrid controllers combining PID with fuzzy logic have been proposed to fine-tune performance under uncertainty [80]. This concept is extended by cluster containment control, where followers are not assigned to a single leader but must remain within the convex hull formed by a group of leaders, facilitating scalable, hierarchical formations [46]. To overcome local minima issues in traditional methods, Improved Artificial Potential Fields (IAPF) integrate consensus protocols and time-integrating factors, ensuring agents can maintain formation shapes while navigating complex obstacle fields [79]. Modern controllers also utilize Control Barrier Functions (CBF) and event-triggered schemes to strictly enforce formation constraints and reduce communication frequency by updating control inputs only when errors exceed dynamic thresholds [39,67].
Synchronization and Time Alignment ensures that agents act in unison, a requirement that is critical for time-sensitive missions like simultaneous data gathering or coherent phased-array transmission [14]. In FANETs, packet delays and topology changes induce clock drift; therefore, self-organizing timing synchronization models have been developed to manage packet overheads and estimate transmission timing errors, ensuring temporal alignment across the swarm [36]. Beyond clock time, agents must synchronize their physical states. Techniques such as Sigma Point Belief Propagation (SPBP) are utilized for cooperative navigation, allowing low-cost UAVs to fuse local GNSS, IMU, and UWB range data to maintain synchronized relative position estimates even when individual GPS signals are degraded [62].
The survivability of a swarm depends on its ability to avoid physical collisions while simultaneously preventing network fragmentation [17]. These two objectives are often conflicting, as avoiding collisions requires dispersion while maintaining connectivity requires proximity. Collision avoidance is frequently implemented using Artificial Potential Fields (APF), where obstacles exert repulsive forces; safety is enhanced by defining “Collision Hazard Zones” where repulsive forces increase exponentially [79].
Nonlinear Model Predictive Control (NMPC) is also widely used to solve constrained optimization problems for collision-free trajectories in real-time [51]. Simultaneously, connectivity is treated as a constraint in the control loop, where interaction forces act as “virtual springs” to prevent agents from exceeding maximum communication ranges [78]. To ensure resilience against node failures, level-based distributed recursive self-healing algorithms allow the swarm to rapidly identify critical nodes and autonomously reconfigure the topology to restore connectivity [56]. Recent approaches also integrate CBF as “safety shields” within Reinforcement Learning frameworks, ensuring that learned policies for coverage do not violate safety or connectivity constraints [106]. Furthermore, resilience frameworks explicitly model environmental disturbances, such as wind fields, using Bayesian updates to robustly plan paths around dynamic threats [50].
4.1.1. Functional Distribution of Coordination Mechanisms
The quantitative distribution of coordination mechanisms across the selected literature, as illustrated in Figure 14, reveals that Connectivity Maintenance and Collision Avoidance is the most frequently addressed pillar, appearing in 97 of the 146 analyzed publications. This dominance highlights the dual critical requirement of balancing inter-agent proximity for decentralized communication with the repulsive forces necessary to prevent physical impact in dense formations [78]. Formation Control follows as the second most studied mechanism with 85 entries, emphasizing strategies such as leader-follower and virtual structures to maintain geometric integrity during mission execution [2,13]. In contrast, Consensus, Task Allocation, and Synchronization appear less frequently in the article poll, with 54, 47, and 45 entries respectively. This disparity suggests that while state agreement and role distribution are essential for swarm intelligence, the research community is currently prioritizing fundamental safety and structural stability over high-level mission logic. Such trends indicate a maturing field that focuses on resolving the primary physical and connective challenges of multi-agent systems in dynamic environments as a necessary prerequisite for more complex cooperative tasks [4,45].
4.2. Categorization by Algoritmic Nature of Swarming Appraches
The engineering of multi-rotor Uncrewed Aerial Vehicle (UAV) swarms is underpinned by diverse methodological paradigms designed to facilitate autonomous cooperation and collective goal achievement [1]. Based on the systematic mapping conducted in this study, it is proposed to categorize these strategies into four algorithmic nature categories:
- Bio-Inspired Approaches
- Optimization-Based Models
- Control-Theoretical Methods
- AI and Deep Learning Models
Bio-inspired strategies derive from natural collectives, utilizing decentralized local interactions to ensure scalability and adaptability in dynamic settings [2,25]. Beyond the foundational Reynolds Boids model used for movement heuristics [81], variations such as the Vicsek model allow for the analysis of phase transitions and self-ordering within particle systems [27,73]. For tactical operations, models like Wolf Pack Hunting facilitate dynamic role-switching among agents during search-and-attack missions [139]. Furthermore, Pigeon-Inspired Optimization (PIO) and insect-mimetic algorithms like Ant Colony Optimization (ACO) and Artificial Bee Colony (ABC) are extensively applied to optimize path planning and routing in cluttered spaces [15,16,49,107]. Specialized meta-heuristics, including the Salp Swarm Algorithm (SSA) and Fruit Fly Optimization, extend these biological principles to multimodal function localization and target interception [5,24].
Optimization-based approaches treat swarm coordination as a formal cost minimization or utility maximization problem [11]. PSO is central to this domain, adjusting agent trajectories based on local and global optima to ensure convergence in three-dimensional environments [48,102]. These methods frequently integrate hybrid mechanisms, such as Genetic Algorithms (GA) or Cauchy mutations, to navigate complex state spaces and prevent premature convergence to local minima [45,48,73,124]. Furthermore, combinatorial optimization frameworks addressing the MTSP are vital for the efficient distribution of targets among heterogeneous agents in multi-objective missions [5,11].
Control theoretical paradigms provide the rigorous deterministic spine necessary for precise formation maintenance and trajectory tracking [13]. This school of thought relies on consensus protocols to enable state agreement via algebraic graph theory [12,79], often augmented by event-triggered mechanisms to optimize communication efficiency [67]. Guidance is frequently managed via APF, with improved variants IAPF addressing local minima issues through virtual leadership or consensus integration [49,79]. In leader-follower topologies, adaptive hybrid controllers and virtual leader strategies mitigate vulnerabilities to single points of failure [12,46,80]. More complex maneuvers in constrained airspaces are governed by MPC and DMPC, which resolve finite-horizon optimization problems at each time step [30,35,63]. Low-level flight stability is typically ensured through SMC, valued for its insensitivity to parameter variations and external disturbances [58,83,86].
Finally, the increasing complexity of operational environments has driven the adoption of data-driven AI models, which augment traditional deterministic frameworks [1,2]. Reinforcement Learning (RL) and Deep Reinforcement Learning (DRL) paradigms allow swarms to learn optimal policies through environmental interaction, with architectures like Deep Q-Networks (DQN) and Proximal Policy Optimization (PPO) facilitating navigation and obstacle avoidance [10,19,42,45,90]. In large-scale scenarios, MARL resolves non-stationarity issues to support collaborative search and resource allocation [5,44,59]. To enhance controller robustness against unmodeled dynamics, Artificial Neural Networks (ANNs) and Radial Basis Function (RBF) networks are integrated into formation loops [2,55,89]. Additionally, Federated Learning (FL) and its hierarchical variants have emerged as critical enablers for collaborative model training without raw data sharing, optimizing both privacy and communication bandwidth in distributed sensing operations [26,28,145].
4.2.1. Functional Distribution of Swarming Intelligence Paradigms Regarding Algorithmic Nature of the Swarming Approaches
Figure 15 provides a comparative view of the methodological paradigms used to engineer autonomous cooperation, showing a significant concentration in Control Theoretical Methods and Optimization-Based Models [2,5]. These results indicate that the field relies heavily on a “rigorous deterministic spine” for trajectory tracking and cost-minimization frameworks, such as PSO, to navigate complex state spaces [16]. While AI and Deep Learning Models show substantial representation, reflecting the trend toward using Reinforcement Learning to handle unmodeled dynamics and environmental uncertainty [31,55], they have not yet overtaken traditional control methods. Interestingly, Bio-Inspired Approaches, despite being the foundational inspiration for behaviors like flocking [27], are the least represented category in the current literature poll. This shift suggests a maturing field that is moving away from purely heuristic biological mimicry toward more formal, mathematically verifiable coordination strategies [37].
4.3. Systematization of Swarming Behaviors: From Local Rules to Global Phases
Swarming behaviors in multi-rotor UAV systems are predominantly inspired by the self-organizing principles observed in biological collectives such as bird flocks, fish schools, and insect colonies [16,81]. These natural systems demonstrate how sophisticated global coordination can emerge from simple local interaction rules, without the presence of centralized supervision or explicit global planning [32]. In SR, this paradigm enables scalable, robust coordination by leveraging local perception and decentralized decision-making.
A large portion of the literature adopts the Boids model, which formalizes flocking dynamics through three fundamental interaction rules: separation, alignment, and cohesion as illustrated in Figure 16 [20,25,81,109]. Separation governs collision avoidance by requiring each agent to maintain a minimum distance from its neighbors [25,103]. In mathematical formulations, this behavior is often modeled as a repulsive force that increases rapidly as agents approach a predefined safety radius [13,43,103]. Effective separation is essential for safe operation in dense formations and cluttered environments, where inter-agent distances may vary rapidly [30,32].
Alignment drives agents to match both the velocity magnitude and heading direction of their local neighbors, promoting synchronized motion across the swarm [20,25,79]. This rule ensures directional coherence, allowing the swarm to behave as a unified entity rather than a collection of independent robots [56,81]. Alignment is particularly critical in tasks such as migration, convoy tracking, or coordinated target pursuit, where maintaining a common direction of travel is essential [32,37].
Cohesion encourages each agent to move toward the average position, or center of mass, of its neighboring agents [14,20,25]. This attractive interaction prevents fragmentation and ensures the structural integrity of the group [13,43,103]. In practice, cohesion must be carefully balanced against separation to maintain a stable inter-agent spacing, often referred to as the characteristic length scale of the swarm [32,88].
The combined effect of separation, alignment, and cohesion gives rise to flocking, a holistic collective behavior frequently augmented by an additional migration term that biases the swarm toward a desired goal or waypoint [30,37]. In three-dimensional environments, flocking becomes significantly more complex, as agents must also regulate vertical interactions, manage altitude-dependent constraints, and mitigate aerodynamic effects such as downwash to maintain stability and cohesion [32].
Depending on the relative strength of these interaction rules, different collective phases can emerge. In the schooling phase, the swarm exhibits both strong cohesion and high polarization, with agents tightly aligned in a common direction of motion [32]. Swarming describes a cohesive but weakly aligned state, in which agents remain grouped without a dominant travel direction, a configuration often exploited for area exploration or spatial coverage. Milling corresponds to a rotational pattern where agents orbit a shared center, a behavior particularly relevant for non-stoppable vehicles such as fixed-wing UAVs that must maintain continuous motion to remain airborne [32].
Beyond these behavioral primitives, the literature distinguishes swarm systems according to how collective intelligence is generated, broadly categorizing approaches as programmed or emergent [33,37]. Programmed, or handcrafted, swarm behaviors rely on explicit algorithms, predefined trajectories, or centralized planning structures [9,11,33].
In contrast, emergent or self-organized swarm behaviors arise from decentralized agents interacting through local sensing and simple rules, without explicit global coordination [1,27,109]. Agents typically respond only to a limited subset of influential neighbors, adjusting their state based on local observations [32,37].
Recent research increasingly leverages MARL and DRL to enable swarms to autonomously learn coordination policies that outperform manually designed rules in complex or adversarial environments [2,31,44,146]. In this context, a programmed swarm can be likened to a theater troupe following a rigid script provided by a director, precise and visually striking, yet fragile if the script is lost. An emergent swarm, by contrast, resembles the collective flow of people navigating a busy airport: no single agent is in charge, yet by adhering to simple local conventions such as avoiding collisions and maintaining direction, coherent global movement emerges that can adapt seamlessly to unexpected disruptions.
5. Conclusions
The analysis of the 146 peer-reviewed articles selected for this review reveals a field characterized by significant growth but constrained by practical and methodological limitations. The prevailing trend in the literature demonstrates a clear transition toward decentralized and distributed architectures, which are favored for their fault tolerance and scalability in contested or communication-constrained environments. However, quantitative findings indicate a gap between theoretical ambition and experimental reality, as the majority of research remains focused on small-scale swarms consisting of ten or fewer agents.
The proposed taxonomy highlights that current research prioritizes foundational safety and structural stability, such as collision avoidance and formation control, over high-level mission logic. Methodologically, control theory and optimization-based models provide the mathematical backbone for most mission-critical tasks. While data-driven AI models are emerging to handle environmental uncertainty and unmodeled dynamics, they have yet to surpass traditional deterministic frameworks in terms of literature representation. Validation practices reveal a persistent structural reliance on virtual environments, with 62% of the reviewed studies restricted to numerical simulations. This reliance contributes to a “Reality Gap” where simulated behaviors often fail to account for complex aerodynamics, communication latency, and battery discharge characteristics found in physical deployments. Physical experimentation remains a secondary and resource-intensive stage in the development process.
Ultimately, this review concludes that the current research landscape is heavily skewed toward niche applications, such as military reconnaissance and precision agriculture, rather than the development of a general engineering methodology. Current implementations often bypass standardized frameworks, resulting in fragmented solutions that are difficult to compare scientifically or scale effectively. To advance beyond laboratory-scale demonstrations, future efforts must prioritize hardening Sim-to-Real transfer, establishing unified performance metrics, and developing formal engineering standards that integrate hardware constraints and communication reliability with algorithmic logic.
Author Contributions
Conceptualization, D.C., A.A. and A.M.; methodology, D.C.; validation, D.C. and A.A.; formal analysis, D.C.; investigation, D.C.; resources, D.C. and A.M.; writing—original draft preparation, D.C.; writing—review and editing, D.C., A.A. and A.M.; visualization, D.C., A.A. and A.M.; supervision, A.A. and A.M.; project administration, A.M.; funding acquisition, A.M. All authors have read and agreed to the published version of the manuscript.
Funding
The authors acknowledge Fundação para a Ciência e a Tecnologia (FCT) for its financial support via LAETA (project https://doi.org/10.54499/UID/50022/2025) and under the scholarship with reference 2024.03868.BD.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| ABC | Artificial Bee Colony |
| ACO | Ant Colony Optimization |
| ADS-B | Automatic Dependent Surveillance–Broadcast |
| AI | Artificial Intelligence |
| ANN | Artificial Neural Network |
| AODV | Ad hoc On-Demand Distance Vector |
| APF | Artificial Potential Field |
| CBF | Control Barrier Function |
| CSMA/CA | Carrier Sense Multiple Access with Collision Avoidance |
| DMPC | Distributed Model Predictive Control |
| DQN | Deep Q-Network |
| DRL | Deep Reinforcement Learning |
| FANET | Flying Ad-hoc Network |
| FL | Federated Learning |
| GCS | Ground Control Station |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| GWO | Grey Wolf Optimizer |
| HITL | Hardware-in-the-Loop |
| IAPF | Improved Artificial Potential Field |
| IMU | Inertial Measurement Unit |
| IoT | Internet of Things |
| LiDAR | Light Detection and Ranging |
| LoRa | Long Range |
| MAC | Medium Access Control |
Abbreviations
| MARL | Multi-Agent Reinforcement Learning |
| MAS | Multi-Agent System |
| MPC | Model Predictive Control |
| MRAC | Model Reference Adaptive Control |
| MTSP | Multiple Traveling Salesman Problem |
| NMPC | Nonlinear Model Predictive Control |
| OFFSET | Offensive Swarm-Enabled Tactics |
| OLSR | Optimized Link State Routing |
| PID | Proportional-Integral-Derivative |
| PIO | Pigeon-Inspired Optimization |
| PPO | Proximal Policy Optimization |
| PSO | Particle Swarm Optimization |
| RBF | Radial Basis Function |
| RF | Radio Frequency |
| RL | Reinforcement Learning |
| RNC | Random Network Coding |
| ROS | Robot Operating System |
| RSSI | Received Signal Strength Indicator |
| RTK | Real-Time Kinematic |
| SAR | Search and Rescue |
| SITL | Software-in-the-Loop |
| SLAM | Simultaneous Localization and Mapping |
| SMC | Sliding Mode Control |
| SR | Swarm Robotics |
| SSA | Salp Swarm Algorithm |
| TDMA | Time Division Multiple Access |
| UAS | Unmanned Aircraft System |
| UAV | Uncrewed Aerial Vehicle |
| UWB | Ultra-Wideband |
| VTOL | Vertical Take-Off and Landing |
| YOLO | You Only Look Once |
References
- Alqudsi, Y.; Makaraci, M. UAV Swarms: Research, Challenges, and Future Directions. Journal of Engineering and Applied Science 2025, 72, 12. [Google Scholar] [CrossRef]
- Bu, Y.; Yan, Y.; Yang, Y. Advancement Challenges in UAV Swarm Formation Control: A Comprehensive Review. 8, 320. [CrossRef]
- Ming, R.; Jiang, R.; Luo, H.; Lai, T.; Guo, E.; Zhou, Z. Comparative Analysis of Different UAV Swarm Control Methods on Unmanned Farms. 13, 2499. [CrossRef]
- Javed, S.; Hassan, A.; Ahmad, R.; Ahmed, W.; Ahmed, R.; Saadat, A.; Guizani, M. State-of-the-Art and Future Research Challenges in UAV Swarms. 11, 19023–19045. [CrossRef]
- Arshid, K.; Krayani, A.; Marcenaro, L.; Gomez, D.M.; Regazzoni, C. Toward Autonomous UAV Swarm Navigation: A Review of Trajectory Design Paradigms. 25, 5877. [CrossRef]
- Zaitseva, E.; Levashenko, V.; Mukhamediev, R.; Brinzei, N.; Kovalenko, A.; Symagulov, A. Review of Reliability Assessment Methods of Drone Swarm (Fleet) and a New Importance Evaluation Based Method of Drone Swarm Structure Analysis. 11, 2551. [CrossRef]
- Dias, P.G.F.; Silva, M.C.; Rocha Filho, G.P.; Vargas, P.A.; Cota, L.P.; Pessin, G. Swarm Robotics: A Perspective on the Latest Reviewed Concepts and Applications. 21, 2062. [CrossRef]
- Cardona, G.A.; Ramirez-Rugeles, J.; Mojica-Nava, E.; Calderon, J.M. Visual Victim Detection and Quadrotor-Swarm Coordination Control in Search and Rescue Environment. 11, 2079. [CrossRef]
- Behjat, A.; Manjunatha, H.; Kumar, P.K.; Jani, A.; Collins, L.; Ghassemi, P.; Distefano, J.; Doermann, D.; Dantu, K.; Esfahani, E.; et al. Learning Robot Swarm Tactics over Complex Adversarial Environments. In Proceedings of the 2021 International Symposium on Multi-Robot and Multi-Agent Systems (MRS); IEEE; pp. 83–91. [CrossRef]
- Jung, W.; Park, C.; Lee, S.; Kim, H. Enhancing UAV Swarm Tactics with Edge AI: Adaptive Decision Making in Changing Environments. 8, 582. [CrossRef]
- Checker, L.; Xie, H.; Khaksar, S.; Murray, I. Systematic Review of Multi-Objective UAV Swarm Mission Planning Systems from Regulatory Perspective. 9, 509. [CrossRef]
- Lizzio, F.F.; Capello, E.; Guglieri, G. A Review of Consensus-based Multi-agent UAV Implementations. 106 43. [CrossRef]
- Do, H.; Hua, H.; Nguyen, M.; Nguyen, C.; Nguyen, H.; Nguyen, H.; Nguyen, N. Formation Control Algorithms for Multiple-UAVs: A Comprehensive Survey. 8, 170230. [CrossRef]
- Wang, L.; Huang, W.; Li, H.; Li, W.; Chen, J.; Wu, W. A Review of Collaborative Trajectory Planning for Multiple Unmanned Aerial Vehicles. 12, 1272. [CrossRef]
- Yang, Y.; Xiong, X.; Yan, Y. UAV Formation Trajectory Planning Algorithms: A Review. 7, 62. [CrossRef]
- Aljalaud, F.; Kurdi, H.; Youcef-Toumi, K. Bio-Inspired Multi-UAV Path Planning Heuristics: A Review. 11, 2356. [CrossRef]
- Tang, J.; Lao, S.; Wan, Y. Systematic Review of Collision-Avoidance Approaches for Unmanned Aerial Vehicles. 16, 4356–4367. [CrossRef]
- Caballero-Martin, D.; Lopez-Guede, J.M.; Estevez, J.; Graña, M. Artificial Intelligence Applied to Drone Control: A State of the Art. 8, 296. [CrossRef]
- Frattolillo, F.; Brunori, D.; Iocchi, L. Scalable and Cooperative Deep Reinforcement Learning Approaches for Multi-UAV Systems: A Systematic Review. 7, 236. [CrossRef]
- Azoulay, R.; Haddad, Y.; Reches, S. Machine Learning Methods for UAV Flocks Management-A Survey. 9, 139146–139175. [CrossRef]
- Tang, Hao; Xu, Yanli. Unmanned Aerial Vehicle Cluster Task Assignment and Related Research Review. 7. [CrossRef]
- Khelifi, M.; Butun, I. Swarm Unmanned Aerial Vehicles (SUAVs): A Comprehensive Analysis of Localization, Recent Aspects, and Future Trends 2022, 1–10. [CrossRef]
- Tong, P.; Yang, X.; Yang, Y.; Liu, W.; Wu, P. Multi-UAV Collaborative Absolute Vision Positioning and Navigation: A Survey and Discussion. 7, 261. [CrossRef]
- Phadke, A.; Medrano, F.A. Towards Resilient UAV Swarms—A Breakdown of Resiliency Requirements in UAV Swarms. 6, 340. [CrossRef]
- Shahzad, M.M.; Saeed, Z.; Akhtar, A.; Munawar, H.; Yousaf, M.H.; Baloach, N.K.; Hussain, F. A Review of Swarm Robotics in a NutShell. 7, 269. [CrossRef]
- Ding, Y.; Yang, Z.; Pham, Q.V.; Hu, Y.; Zhang, Z.; Shikh-Bahaei, M. Distributed Machine Learning for UAV Swarms: Computing, Sensing, and Semantics. 11, 7447–7473. [CrossRef]
- Duan, H.; Huo, M.; Fan, Y. From Animal Collective Behaviors to Swarm Robotic Cooperation. 10, nwad040. [CrossRef]
- Hoang, D.; Truong, V.T.; Le, H.D.; Le, L.B. Clustered and Scalable Federated Learning Framework for UAV Swarms. [CrossRef]
- Azam, M.A.; Mittelmann, H.D.; Ragi, S. UAV Formation Shape Control via Decentralized Markov Decision Processes. 14, 91. [CrossRef]
- Soria, E.; Schiano, F.; Floreano, D. Distributed Predictive Drone Swarms in Cluttered Environments. 7, 73–80. [CrossRef]
- Bai, C.; Yan, P.; Piao, H.; Pan, W.; Guo, J. Learning-Based Multi-UAV Flocking Control With Limited Visual Field and Instinctive Repulsion. 54, 462–475. [CrossRef]
- Verdoucq, M.; Sire, C.; Escobedo, R.; Theraulaz, G.; Hattenberger, G. Bio-Inspired 3D Flocking Algorithm with Minimal Information Transfer for Drones Swarms. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); IEEE; pp. 8833–8838. [CrossRef]
- Amala Arokia Nathan, R.J.; Kurmi, I.; Bimber, O. Drone Swarm Strategy for the Detection and Tracking of Occluded Targets in Complex Environments. 2, 55. [CrossRef]
- Chen, H.; Wang, X.; Shen, L.; Cong, Y. Formation Flight of Fixed-Wing UAV Swarms: A Group-Based Hierarchical Approach. 34, 504–515. [CrossRef]
- Zhao, J.; Sun, J.; Cai, Z.; Wang, Y.; Wu, K. Distributed Coordinated Control Scheme of UAV Swarm Based on Heterogeneous Roles. 35, 81–97. [CrossRef]
- Alsolami, F.; Alqurashi, F.A.; Hasan, M.K.; Saeed, R.A.; Abdel-Khalek, S.; Ben Ishak, A. Development of Self-Synchronized Drones’ Network Using Cluster-Based Swarm Intelligence Approach. 9, 48010–48022. [CrossRef]
- Aguzzi, G.; Casadei, R.; Viroli, M. MacroSwarm: A Field-Based Compositional Framework for Swarm Programming. In Coordination Models and Languages; Jongmans, S.S., Lopes, A., Eds.; Springer Nature Switzerland; Vol. 13908, pp. 31–51. [CrossRef]
- Arafat, M.Y.; Moh, S. Bio-Inspired Approaches for Energy-Efficient Localization and Clustering in UAV Networks for Monitoring Wildfires in Remote Areas. 9, 18649–18669. [CrossRef]
- Hu, Z.; Jin, X. Formation Control for an UAV Team With Environment-Aware Dynamic Constraints. 9, 1465–1480. [CrossRef]
- Jia, L.; Wang, L.; Quan, W.; Qiao, E.; Zhang, Z.; Chen, C. A Multi-Agent Based Simulation Modeling Method for UAV Swarm Collaborative Combat. In Proceedings of the 2024 39th Youth Academic Annual Conference of Chinese Association of Automation (YAC); IEEE; pp. 1061–1066. [CrossRef]
- He, H.; Huo, M.; Duan, H.; Deng, Y.; Wei, C. Distributed Cooperative Control of Human–UAV Swarm Based on State Observation; pp. 1–11. [CrossRef]
- Bayerlein, H.; Theile, M.; Caccamo, M.; Gesbert, D. Multi-UAV Path Planning for Wireless Data Harvesting With Deep Reinforcement Learning. 2, 1171–1187. [CrossRef]
- Brandstätter, A.; Smolka, S.A.; Stoller, S.D.; Tiwari, A.; Grosu, R. Multi-Agent Spatial Predictive Control with Application to Drone Flocking (Extended Version). [CrossRef]
- Hou, Y.; Zhao, J.; Zhang, R.; Cheng, X.; Yang, L. UAV Swarm Cooperative Target Search: A Multi-Agent Reinforcement Learning Approach. 9, 568–578. [CrossRef]
- Cao, P.; Lei, L.; Cai, S.; Shen, G.; Liu, X.; Wang, X.; Zhang, L.; Zhou, L.; Guizani, M. Computational Intelligence Algorithms for UAV Swarm Networking and Collaboration: A Comprehensive Survey and Future Directions. 26, 2684–2728. [CrossRef]
- Hu, J.; Bhowmick, P.; Jang, I.; Arvin, F.; Lanzon, A. A Decentralized Cluster Formation Containment Framework for Multirobot Systems. 37, 1936–1955. [CrossRef]
- Misra, S.; Deb, P.K.; Saini, K. Dynamic Leader Selection in a Master-Slave Architecture-Based Micro UAV Swarm. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM); IEEE; pp. 1–6. [CrossRef]
- Ali, Z.A.; Zhangang, H. Multi-Unmanned Aerial Vehicle Swarm Formation Control Using Hybrid Strategy. Transactions of the Institute of Measurement and Control 2021, 43, 2689–2701. [Google Scholar] [CrossRef]
- Li, S.; Fang, X. A Modified Adaptive Formation of UAV Swarm by Pigeon Flock Behavior within Local Visual Field. 114, 106736. [CrossRef]
- Phadke, A.; Medrano, F.A.; Chu, T.; Sekharan, C.N.; Starek, M.J. Modeling Wind and Obstacle Disturbances for Effective Performance Observations and Analysis of Resilience in UAV Swarms. 11, 237. [CrossRef]
- Lindqvist, B.; Sopasakis, P.; Nikolakopoulos, G. A Scalable Distributed Collision Avoidance Scheme for Multi-agent UAV Systems. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); IEEE; pp. 9212–9218. [CrossRef]
- Ayane, F.A.; El Khamlichi, B.; Seghrouchni, A.E.F. Distributed Cooperative UAV Leader-Follower Strategies in GNSS-Denied Environments. In Proceedings of the 2025 21st International Conference on Distributed Computing in Smart Systems and the Internet of Things (DCOSS-IoT); IEEE; pp. 368–374. [CrossRef]
- Westheider, J.; Rückin, J.; Popović, M. Multi-UAV Adaptive Path Planning Using Deep Reinforcement Learning. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); IEEE; pp. 649–656. [CrossRef]
- Hu, J.; Niu, H.; Carrasco, J.; Lennox, B.; Arvin, F. Fault-Tolerant Cooperative Navigation of Networked UAV Swarms for Forest Fire Monitoring. 123, 107494. [CrossRef]
- Shi, G.; Honig, W.; Shi, X.; Yue, Y.; Chung, S.J. Neural-Swarm2: Planning and Control of Heterogeneous Multirotor Swarms Using Learned Interactions. 38, 1063–1079. [CrossRef]
- Feng, J.; Pan, Z.; Deng, H.; Xia, Y. A Level-Based Distributed Recursive Self-Healing Algorithm of Unmanned Aerial Vehicle Swarm; pp. 1–12. [CrossRef]
- Wu, Y.; Low, K.H.; Pang, B.; Tan, Q. Swarm-Based 4D Path Planning For Drone Operations in Urban Environments. 70, 7464–7479. [CrossRef]
- Mechali, O.; Iqbal, J.; Wang, J.; Xie, X.; Xu, L. Distributed Leader-Follower Formation Control of Quadrotors Swarm Subjected to Disturbances. In Proceedings of the 2021 IEEE International Conference on Mechatronics and Automation (ICMA); IEEE; pp. 1442–1447. [CrossRef]
- Li, S.; Jia, Y.; Yang, F.; Qin, Q.; Gao, H.; Zhou, Y. Collaborative Decision-Making Method for Multi-UAV Based on Multiagent Reinforcement Learning. 10, 91385–91396. [CrossRef]
- Zhang, Z.; Xu, X.; Cui, J.; Meng, W. Multi-UAV Area Coverage Based on Relative Localization: Algorithms and Optimal UAV Placement. 21, 2400. [CrossRef]
- Tang, C.; Wang, Y.; Zhang, L.; Zhang, Y.; Song, H. Multisource Fusion UAV Cluster Cooperative Positioning Using Information Geometry. 14, 5491. [CrossRef]
- Chen, M.; Xiong, Z.; Song, F.; Xiong, J.; Wang, R. Cooperative Navigation for Low-Cost UAV Swarm Based on Sigma Point Belief Propagation. 1976, 14. [Google Scholar] [CrossRef]
- Chen, Q.; Jin, Y.; Wang, T.; Wang, Y.; Yan, T.; Long, Y. UAV Formation Control Under Communication Constraints Based on Distributed Model Predictive Control. 10, 126494–126507. [CrossRef]
- Xu, H.; Zhang, Y.; Zhou, B.; Wang, L.; Yao, X.; Meng, G.; Shen, S. Omni-Swarm: A Decentralized Omnidirectional Visual–Inertial–UWB State Estimation System for Aerial Swarms. 38, 3374–3394. [CrossRef]
- Arevalo-Castiblanco, M.F.; Wi, Y.; Uribe, M.C.C.A. An Application of Model Reference Adaptive Control for Multi-Agent Synchronization in Drone Networks. Available online: http://arxiv.org/abs/2407.00570[2407.00570. [CrossRef]
- Chen, Y.; Dong, Q.; Shang, X.; Wu, Z.; Wang, J. Multi-UAV Autonomous Path Planning in Reconnaissance Missions Considering Incomplete Information: A Reinforcement Learning Method. 7 10. [CrossRef]
- Han, Q.; Zhou, Y.; Liu, X.; Tuo, X. Event-Triggered Finite-Time Attitude Cooperative Control for Multiple Unmanned Aerial Vehicles; 2022; pp. 1–13. [Google Scholar] [CrossRef]
- Spyridis, Y.; Lagkas, T.; Sarigiannidis, P.; Zhang, J. Modelling and Simulation of a New Cooperative Algorithm for UAV Swarm Coordination in Mobile RF Target Tracking. 107, 102232. [CrossRef]
- Yan, B.; Shi, P.; Lim, C.C. Robust Formation Control for Nonlinear Heterogeneous Multiagent Systems Based on Adaptive Event-Triggered Strategy. 19, 2788–2800. [CrossRef]
- Uspenskyi, V.B.; Shyriaieva, N.V. Relative Navigation of UAV in a Swarm. In Proceedings of the 2023 IEEE 4th KhPI Week on Advanced Technology (KhPIWeek); IEEE; pp. 1–5. [CrossRef]
- Song, H.; Liu, L.; Shang, B.; Pudlewski, S.; Bentley, E.S. Enhanced Flooding-Based Routing Protocol for Swarm UAV Networks: Random Network Coding Meets Clustering. In Proceedings of the IEEE INFOCOM 2021 - IEEE Conference on Computer Communications. IEEE; pp. 1–10. [CrossRef]
- Chen, S.; Yin, D.; Niu, Y. A Survey of Robot Swarms’ Relative Localization Method. 22, 4424. [CrossRef]
- Ali, Z.A.; Han, Z.; Masood, R.J. Collective Motion and Self-Organization of a Swarm of UAVs: A Cluster-Based Architecture. Sensors 2021, 21, 3820. [Google Scholar] [CrossRef]
- Mardiyanto, R.; Hisak, M.N.; Mujiono, T.; Suryoatmojo, H. Robot Operating System (ROS) Framework for Swarm Drone Flight Controller. In Proceedings of the 2022 International Seminar on Intelligent Technology and Its Applications (ISITIA); IEEE; pp. 297–303. [CrossRef]
- Yu, Y.; Guo, J.; Chadli, M.; Xiang, Z. Distributed Adaptive Fuzzy Formation Control of Uncertain Multiple Unmanned Aerial Vehicles With Actuator Faults and Switching Topologies. 31, 919–929. [CrossRef]
- Baldi, S.; Sun, D.; Zhou, G.; Liu, D. Adaptation to Unknown Leader Velocity in Vector-Field UAV Formation. 58, 473–484. [CrossRef]
- Li, J.; Zhang, G.; Shan, Q.; Zhang, W. A Novel Cooperative Design for USV–UAV Systems: 3-D Mapping Guidance and Adaptive Fuzzy Control. 10, 564–574. [CrossRef] [PubMed]
- Zhang, D.; Duan, H.; Zeng, Z. Leader–Follower Interactive Potential for Target Enclosing of Perception-Limited UAV Groups. 16, 856–867. [CrossRef]
- Wang, Y.; Zhong, Y.; Zhang, Y.; Shi, Y.; Chen, H. Unmanned Aerial Vehicle Formation Control Method Based on Improved Artificial Potential Field and Consensus. 18, 2555–2567. [CrossRef]
- Ali, Z.A.; Israr, A.; Alkhammash, E.H.; Hadjouni, M. A Leader-Follower Formation Control of Multi-UAVs via an Adaptive Hybrid Controller. 2021, 9231636. [Google Scholar] [CrossRef]
- Shen, G.; Lei, L.; Li, Z.; Cai, S.; Zhang, L.; Cao, P.; Liu, X. Deep Reinforcement Learning for Flocking Motion of Multi-UAV Systems: Learn From a Digital Twin. 9, 11141–11153. [CrossRef]
- Xiao, J.; Fang, X.; Jia, Q.; Feroskhan, M. Learning Resilient Formation Control of Drones With Graph Attention Network. 12, 24028–24040. [CrossRef]
- Nguyen, N.P.; Park, D.; Ngoc, D.N.; Xuan-Mung, N.; Huynh, T.T.; Nguyen, T.N.; Hong, S.K. Quadrotor Formation Control via Terminal Sliding Mode Approach: Theory and Experiment Results. 6, 172. [CrossRef]
- Xu, H.; Liu, P.; Chen, X.; Shen, S. $D⌃{2}$SLAM: Decentralized and Distributed Collaborative Visual-Inertial SLAM System for Aerial Swarm. 40, 3445–3464. [CrossRef]
- Kumari, N.; Lee, K.; Ranaweera, C.; Barca, J.C. A Comparison of Clustering vs YOLO for Drone Swarm Centroid Detection. In Proceedings of the 2023 8th International Conference on Robotics and Automation Engineering (ICRAE); IEEE; pp. 106–111. [CrossRef]
- Zhao, X.; Tian, B.; You, M.; Ma, L. Adaptive Distributed Sliding Mode Control for Multiple Unmanned Aerial Vehicles With Prescribed Performance. 71, 11480–11490. [CrossRef]
- Pliatsios, D.; Goudos, S.K.; Lagkas, T.; Argyriou, V.; Boulogeorgos, A.A.A.; Sarigiannidis, P. Drone-Base-Station for Next-Generation Internet-of-Things: A Comparison of Swarm Intelligence Approaches. 3, 32–47. [CrossRef]
- Fernando, M. Online Flocking Control of UAVs with Mean-Field Approximation. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA); IEEE; pp. 8977–8983. [CrossRef]
- Yu, Y.; Guo, J.; Ahn, C.K.; Xiang, Z. Neural Adaptive Distributed Formation Control of Nonlinear Multi-UAVs With Unmodeled Dynamics. 34, 9555–9561. [CrossRef] [PubMed]
- Zhan, G.; Zhang, X.; Li, Z.; Xu, L.; Zhou, D.; Yang, Z. Multiple-UAV Reinforcement Learning Algorithm Based on Improved PPO in Ray Framework. 6, 166. [CrossRef]
- Wu, J.; Bai, K.; Wu, H. Advancing Convergence Speed of Distributed Consensus Time Synchronization Algorithms in Unmanned Aerial Vehicle Ad Hoc Networks. 8, 285. [CrossRef]
- Xiao, J.; Pisutsin, P.; Feroskhan, M. Collaborative Target Search With a Visual Drone Swarm: An Adaptive Curriculum Embedded Multistage Reinforcement Learning Approach. 36, 313–327. [CrossRef]
- Yang, P.; Zhang, A.; Zhou, D. Event-Triggered Finite-time Formation Control for Multiple Unmanned Aerial Vehicles with Input Saturation. 19, 1760–1773. [CrossRef]
- Cui, Y.; Chen, Y.; Yang, D.; Shu, Z.; Huang, T.; Gong, X. Resilient Formation Tracking of Spacecraft Swarm Against Actuation Attacks: A Distributed Lyapunov-Based Model Predictive Approach. 53, 7053–7065. [CrossRef]
- Kang, Y.; Luo, D.; Xin, B.; Cheng, J.; Yang, T.; Zhou, S. Robust Leaderless Time-Varying Formation Control for Nonlinear Unmanned Aerial Vehicle Swarm System With Communication Delays. 53, 5692–5705. [CrossRef]
- Zhang, D.; Meng, L.; Hao, Y.; Xia, R. Adaptive Sliding Mode Fault-Tolerant Control of UAV Systems Based on Radial Basis Function Neural Networks. 15, 27504. [CrossRef]
- Zou, Y.; Xia, K.; He, W. Adaptive Fault-Tolerant Distributed Formation Control of Clustered Vertical Takeoff and Landing UAVs. 58, 1069–1082. [CrossRef]
- Yu, Z.; Zhang, Y.; Jiang, B.; Yu, X. Fault-Tolerant Time-Varying Elliptical Formation Control of Multiple Fixed-Wing UAVs for Cooperative Forest Fire Monitoring. 48. [CrossRef]
- Li, J.; Liu, H.; Lai, K.; Ram, B. Vehicle and UAV Collaborative Delivery Path Optimization Model. 10, 3744. [CrossRef]
- Ninkovic, V.; Vukobratovic, D.; Miskovic, D. UAV-assisted Distributed Learning for Environmental Monitoring in Rural Environments. In Proceedings of the 2024 7th International Balkan Conference on Communications and Networking (BalkanCom); pp. 296–300. Available online: http://arxiv.org/abs/2407.02693[2407.02693]. [CrossRef]
- Puente-Castro, A.; Rivero, D.; Pazos, A.; Fernandez-Blanco, E. UAV Swarm Path Planning with Reinforcement Learning for Field Prospecting. 52, 14101–14118. [CrossRef]
- Chu, H.; Yi, J.; Yang, F. Chaos Particle Swarm Optimization Enhancement Algorithm for UAV Safe Path Planning. 12, 8977. [CrossRef]
- Pan, Z.; Zhang, C.; Xia, Y.; Xiong, H.; Shao, X. An Improved Artificial Potential Field Method for Path Planning and Formation Control of the Multi-UAV Systems. 69, 1129–1133. [CrossRef]
- Zheng, J.; Ding, M.; Sun, L.; Liu, H. Distributed Stochastic Algorithm Based on Enhanced Genetic Algorithm for Path Planning of Multi-UAV Cooperative Area Search. 24, 8290–8303. [CrossRef]
- Hanna, S.; Krijestorac, E.; Cabric, D. UAV Swarm Position Optimization for High Capacity MIMO Backhaul. 39, 3006–3021. [CrossRef]
- Ma, Z.; You, J.; Zhang, Y.; Cheng, Y.; Shao, J. Reinforcement Learning-Based Dynamic Coverage Control of Multi-Rotor UAVs With Safety Priority. 22, 17474–17485. [CrossRef]
- Tang, J.; Liu, G.; Pan, Q. A Review on Representative Swarm Intelligence Algorithms for Solving Optimization Problems: Applications and Trends. 8, 1627–1643. [CrossRef]
- Wang, M.; Zhang, T. Leader-Following Formation Control of Second-order Nonlinear Systems with Time-varying Communication Delay. 19, 1729–1739. [CrossRef]
- Wu, J.; Luo, C.; Luo, Y.; Li, K. Distributed UAV Swarm Formation and Collision Avoidance Strategies Over Fixed and Switching Topologies. 52, 10969–10979. [CrossRef]
- Li, W.; Ge, Y.; Guan, Z.; Ye, G. Synchronized Motion-Based UAV–USV Cooperative Autonomous Landing. 10, 1214. [CrossRef]
- Zhao, L.; Li, S.; Guan, Y.; Wan, S.; Hawbani, A.; Bi, Y.; Guizani, M. Adaptive Multi-UAV Trajectory Planning Leveraging Digital Twin Technology for Urban IIoT Applications. 11, 5349–5363. [CrossRef]
- Nie, Y.; Zhao, J.; Gao, F.; Yu, F. Semi-Distributed Resource Management in UAV-Aided MEC Systems: A Multi-Agent Federated Reinforcement Learning Approach. 70, 13162–13173. [CrossRef]
- Wu, Y.; Wu, S.; Hu, X. Multi-Constrained Cooperative Path Planning of Multiple Drones for Persistent Surveillance in Urban Environments. 7, 1633–1647. [CrossRef]
- Hu, J.; Turgut, A.E.; Lennox, B.; Arvin, F. Robust Formation Coordination of Robot Swarms With Nonlinear Dynamics and Unknown Disturbances: Design and Experiments. 69, 114–118. [CrossRef]
- Ruan, L.; Li, G.; Dai, W.; Tian, S.; Fan, G.; Wang, J.; Dai, X. Cooperative Relative Localization for UAV Swarm in GNSS-Denied Environment: A Coalition Formation Game Approach. 9, 11560–11577. [CrossRef]
- Zhou, X.; Wang, Z.; Wen, X.; Zhu, J.; Xu, C.; Gao, F. Decentralized Spatial-Temporal Trajectory Planning for Multicopter Swarms. [CrossRef]
- Yin, T.; Gu, Z.; Xie, X. Observer-Based Event-Triggered Sliding Mode Control for Secure Formation Tracking of Multi-UAV Systems. 10, 887–898. [CrossRef]
- Zhou, X.; Zhu, J.; Zhou, H.; Xu, C.; Gao, F. EGO-Swarm: A Fully Autonomous and Decentralized Quadrotor Swarm System in Cluttered Environments. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA); IEEE; pp. 4101–4107. [CrossRef]
- Nascimento, A.M.; Madruga, S.; Brito, A.; Nascimento, T. A Multi-Rotor UAV Modified Geometric Attitude Controller. In Proceedings of the 2025 Brazilian Conference on Robotics (CROS); IEEE; pp. 1–6. [CrossRef]
- Raja, G.; Baskar, Y.; Dhanasekaran, P.; Nawaz, R.; Yu, K. An Efficient Formation Control Mechanism for Multi-UAV Navigation in Remote Surveillance. In Proceedings of the 2021 IEEE Globecom Workshops (GC Wkshps); IEEE; pp. 1–6. [CrossRef]
- Wang, T.; Huang, X.; Wu, Y.; Qian, L.; Lin, B.; Su, Z. UAV Swarm-Assisted Two-Tier Hierarchical Federated Learning. 11, 943–956. [CrossRef]
- Zhang, X.; Zhang, F.; Huang, P.; Gao, J.; Yu, H.; Pei, C.; Zhang, Y. Self-Triggered Based Coordinate Control With Low Communication for Tethered Multi-UAV Collaborative Transportation. 6, 1559–1566. [CrossRef]
- Qu, Y.; Dai, H.; Zhuang, Y.; Chen, J.; Dong, C.; Wu, F.; Guo, S. Decentralized Federated Learning for UAV Networks: Architecture, Challenges, and Opportunities. 35, 156–162. [CrossRef]
- Wu, Y.; Liang, T.; Gou, J.; Tao, C.; Wang, H. Heterogeneous Mission Planning for Multiple UAV Formations via Metaheuristic Algorithms. 59, 3924–3940. [CrossRef]
- Zhao, C.; Liu, J.; Sheng, M.; Teng, W.; Zheng, Y.; Li, J. Multi-UAV Trajectory Planning for Energy-Efficient Content Coverage: A Decentralized Learning-Based Approach. 39, 3193–3207. [CrossRef]
- Liu, S.; Jiang, B.; Mao, Z.; Zhang, Y. Neural-Network-Based Adaptive Fault-Tolerant Cooperative Control of Heterogeneous Multiagent Systems With Multiple Faults and DoS Attacks. 35, 6273–6285. [CrossRef]
- Wang, N.; Dai, J.; Ying, J. UAV Formation Obstacle Avoidance Control Algorithm Based on Improved Artificial Potential Field and Consensus. 22, 1413–1427. [CrossRef]
- Miao, Y.; Hwang, K.; Wu, D.; Hao, Y.; Chen, M. Drone Swarm Path Planning for Mobile Edge Computing in Industrial Internet of Things. 19, 6836–6848. [CrossRef]
- Huang, H.; Zhu, G.; Fan, Z.; Zhai, H.; Cai, Y.; Shi, Z.; Dong, Z.; Hao, Z. Vision-Based Distributed Multi-UAV Collision Avoidance via Deep Reinforcement Learning for Navigation. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); IEEE; pp. 13745–13752. [CrossRef]
- Zhang, T.; Chai, L.; Wang, S.; Jin, J.; Liu, X.; Song, A.; Lan, Y. Improving Autonomous Behavior Strategy Learning in an Unmanned Swarm System Through Knowledge Enhancement. 71, 763–774. [CrossRef]
- Li, T.; Leng, S.; Wang, Z.; Zhang, K.; Zhou, L. Intelligent Resource Allocation Schemes for UAV-Swarm-Based Cooperative Sensing. 9, 21570–21582. [CrossRef]
- Yu, Y.; Chen, C.; Guo, J.; Chadli, M.; Xiang, Z. Adaptive Formation Control for Unmanned Aerial Vehicles With Collision Avoidance and Switching Communication Network. 32, 1435–1445. [CrossRef]
- Chen, M.; Xiong, Z.; Xiong, J.; Shi, C.; Wang, R. Cooperative Navigation for UAV Swarm via Simplified Gaussian Particle-Based Belief Propagation. 24, 31324–31336. [CrossRef]
- Lee, D.H.; Jeong, J.H.; Ahn, H.J.; Lee, S.W. Design of an EEG-based Drone Swarm Control System Using Endogenous BCI Paradigms. In Proceedings of the 2021 9th International Winter Conference on Brain-Computer Interface (BCI); IEEE; pp. 1–5. [CrossRef]
- Zhi, H.; Chen, L.; Li, C.; Guo, Y. Leader–Follower Affine Formation Control of Second-Order Nonlinear Uncertain Multi-Agent Systems. 68, 3547–3551. [CrossRef]
- Hu, F.; Ma, T.; Su, X. Adaptive Fuzzy Sliding-Mode Fixed-Time Control for Quadrotor Unmanned Aerial Vehicles With Prescribed Performance. 32, 4109–4120. [CrossRef]
- Wang, Z.; Hu, T.; Long, L. Multi-UAV Safe Collaborative Transportation Based on Adaptive Control Barrier Function. 53, 6975–6983. [CrossRef]
- Khalil, H.; Rahman, S.U.; Ullah, I.; Khan, I.; Alghadhban, A.J.; Al-Adhaileh, M.H.; Ali, G.; ElAffendi, M. A UAV-Swarm-Communication Model Using a Machine-Learning Approach for Search-and-Rescue Applications. 6, 372. [CrossRef]
- Jinqiang, H.; Husheng, W.; Renjun, Z.; Rafik, M.; Xuanwu, Z. Self-Organized Search-Attack Mission Planning for UAV Swarm Based on Wolf Pack Hunting Behavior. 32, 1463–1476. [CrossRef]
- Sacco, A.; Esposito, F.; Marchetto, G.; Montuschi, P. Sustainable Task Offloading in UAV Networks via Multi-Agent Reinforcement Learning. 70, 5003–5015. [CrossRef]
- Peng, Y.; Duan, H.; Deng, Y. Reversed Pigeon-Inspired Optimization Algorithm for Unmanned Aerial Vehicle Swarm Cooperative Autonomous Formation Reconfiguration. In Proceedings of the 2022 IEEE 17th International Conference on Control & Automation (ICCA); IEEE; pp. 377–382. [CrossRef]
- Feng, Q.; Hai, X.; Sun, B.; Ren, Y.; Wang, Z.; Yang, D.; Hu, Y.; Feng, R. Resilience Optimization for Multi-UAV Formation Reconfiguration via Enhanced Pigeon-Inspired Optimization. 35, 110–123. [CrossRef]
- Rezwan, S.; Choi, W. Artificial Intelligence Approaches for UAV Navigation: Recent Advances and Future Challenges. 10, 26320–26339. [CrossRef]
- And Communication Networks, S. Retracted: Single-Input Single-Output System with Multiple Time Delay PID Control Methods for UAV Cluster Multiagent Systems 2024, 1–1. [CrossRef]
- Xiao, Y.; Ye, Y.; Huang, S.; Hao, L.; Ma, Z.; Xiao, M.; Mumtaz, S.; Dobre, O.A. Fully Decentralized Federated Learning-Based On-Board Mission for UAV Swarm System. 25, 3296–3300. [CrossRef]
- Zhang, P.; Chen, G.; Li, Y.; Dong, W. Agile Formation Control of Drone Flocking Enhanced With Active Vision-Based Relative Localization. 7, 6359–6366. [CrossRef]
Figure 1.
Conceptual framework and structural organization of the review.

Figure 2.
Schematic illustration of the review’s thematic scope definition (ASIU - Autonomous Swarm Intelligence in UAVs).
Figure 2.
Schematic illustration of the review’s thematic scope definition (ASIU - Autonomous Swarm Intelligence in UAVs).

Figure 3.
Methodology framework adopted for the final article poll selection.

Figure 4.
Word-cloud info-graphic of the keywords in the article poll (created with Wordart).

Figure 5.
World Map Distribution of research publications.

Figure 6.
Statistical distribution of command architectures across the article poll.

Figure 7.
Analysis of swarm scale (N) across the reviewed publications.

Figure 8.
Type of environment in the article poll.

Figure 9.
Dynamic Environment vs Static Environment across article poll.

Figure 10.
Obstacle Density of environments across the article poll.

Figure 11.
Distribution of sensors across UAV swarm platforms in the literature.

Figure 12.
Platform distribution in swarm systems presented in the literature.

Figure 13.
Validation schemes used in the article poll.

Figure 14.
Distribution of coordination mechanisms identified in the reviewed literature.

Figure 15.
Distribution of algorithmic Nature Categories identified across the reviewed literature.

Figure 16.
Swarming Behaviours of Swarm Intelligence.


Table 1.
Search keywords used for the literature review.
| Category | Keywords |
|---|---|
| Platform | quadcopter*, drone*, “uncrewed aerial vehicle*”, UAV, UAS, “unmanned aircraft system*” |
| Control | “formation control”, “cooperative control”, “distributed control”, “decentralized control”, “path planning”, “trajectory planning”, “task allocation”, “collision avoidance” |
| Swarm | swarm*, “swarm intelligence”, “swarm robotics”, “multi-agent”, “multi-agent system*”, MAS, “distributed system*”, “collective behaviour” |
Table 2.
Coordination Mechanisms vs. Swarming Strategy Approaches.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



