Submitted:
27 February 2026
Posted:
27 February 2026
You are already at the latest version
Abstract
Artificial intelligence (AI) is transforming modern agriculture from experience-driven practices into data-driven, intelligent production paradigms. Within our proposed Perception-Decision-Execution (PDE) framework, this paper reviews AI technology advances from year 2015 to 2025 for agricultural intelligence. At the Perception level, we highlight progress in environment sensing systems, particularly unmanned aerial vehicle (UAV) and multi-modal monitoring platforms, for crop disease/pest detection, growth monitoring, and abiotic stress assessment. At the Decision level, integration of heterogeneous data sources, including meteorological recordings, soil measurements, remote sensing (RS), and market information, enables advanced analytical tasks, such as yield prediction, early pest/disease warning, precision irrigation and fertilization planning, and crop management optimization. And at the Execution level, agricultural robots equipped with simultaneous localization and mapping (SLAM) and deep reinforcement learning (RL) facilitate precision spraying, autonomous harvesting, and unmanned field operations. Collectively, AI technologies have demonstrate substantial potential across the PDE chain of agricultural production, while significant challenges persist, such as heterogeneous data fusion, limited model generalization across diverse environments, complex system integration, and high hardware and deployment costs. Future directions are discussed from the perspectives of lightweight model design, cross-platform standardization, enhanced human-machine collaboration, and deep integration of emerging AI paradigms to support scalable, robust, and autonomous agricultural intelligence systems.
Keywords:
agricultural intelligence
; perception
; decision
; execution
; unmanned aerial vehicle
; artificial intelligence
; remote sensing
; simultaneous localization and mapping
1. Introduction
Global food security is continuously challenged by mounting pressures of population growth, climate change, and the scarcity of natural resources. Traditional agricultural production reliant on intensive labor and chemical inputs is not only approaching efficiency limits but also posing significant environmental burden. In this context, agricultural intelligence underpinned by information technology is recognized as critical pathways for transforming this industry, ensuring food security, and achieving sustainable development. The ultimate goal of agricultural intelligence is to enable the digital perception, intelligent decision-making, and automated execution of the entire agricultural production process.
As a core driver of the latest technological revolution, AI is being integrated into all aspects of agriculture with unprecedented depth and scope, propelling a paradigm shift from experience-driven to data- and model-driven farming. Existing studies have witnessed the potential of AI in specific agricultural tasks. For example, deep learning (DL) has achieved pest and disease identification accuracy surpassing human capability[1]; machine learning (ML) has enabled high-precision yield prediction based on multi-source data [2]; and agricultural robots have made substantial progress in autonomous navigation and precise operations.
However, despite these successes within specific domains, research in academia and industry remains largely fragmented. Most studies focus on singular components of “perception”, “decision-making”, or “execution”, lacking a closed-loop framework to connect these discrete modules. This compartmentalization hinders a comprehensive understanding of the intrinsic linkages and synergies among them, including “how perception informs decision-making”, “how decisions guide execution”, and “how execution outcomes feedback to optimize perception and decision-making”. This gap ultimately constrains the development of autonomous agricultural systems. To address this bottleneck is not only a key academic challenge but also a practical impediment to the development and deployment of efficient, intelligent agricultural machinery.
To address the identified research gap, we design an integrated closed-loop system from the Perception-Decision-Execution (PDE) perspective as shown in Figure 1, and a systematical review of modern agricultural technologies is conducted by screening related literature publications from year 2015 to 2025. The objectives of this technical review are twofold, to clarify the technological evolution and convergence pathways for the research community and to provide a theoretical and technical reference for developing highly integrated systems and equipment of agricultural intelligence.
Within this proposed PDE framework, we elaborate on how advanced technologies enable fine-grained, large-scale monitoring of crop phenotypes and environmental stresses (Perception), on how intelligent models facilitate decision-making by fusing multi-source data, and on how agricultural robots translate decisions into precise physical actions using advanced navigation, planning, and control algorithms. Further, using this framework, we review key advances in each component while emphasizing the current state, challenges, and future trends in their integration. Moreover, core existing bottlenecks are analyzed, and future research directions are proposed with a focus on cross-module synergy to enhance sustainability and inclusive agriculture. This systematic review aims to provide a coherent theoretical foundation and practical road-map for developing next-generation efficient, intelligent, and sustainable autonomous agricultural systems, thereby supporting systematic innovation of smart agricultural equipment and facilitating the transition of smart agriculture from concept to widespread implementation.
2. Related Publication Retrieval and Screening
To systematically present technological advances in agricultural intelligence, we adopted a structured methodology for literature retrieval and screening. Guided by the PDE framework, we developed a set of targeted search terms, including “agricultural perception”, “computer vision”, “deep learning”, “unmanned aerial vehicle”, “pest and disease identification”, and “growth monitoring”. These terms were used to query major academic databases, including Web of Science, IEEE Xplore, and Google Scholar, for publications published between 2015 and 2025. The initial search yielded 946 publications. A preliminary screening was conducted based on publication year and alignment with the PDE framework layers, resulting in 323 studies closely related to the research scope. Subsequently, an in-depth review of abstracts was performed, with particular emphasis on innovative contributions in emerging areas, such as agricultural perception, deep learning model optimization, and multi-modal data fusion. This step enabled the identification of cutting-edge developments and the inclusion of significant research directions that may not have been fully captured in the initial filtering stage. Further analysis was then conducted to examine key emerging themes within the selected literature, including deep learning architectures, lightweight model deployment, and multi-modal fusion strategies. In synthesizing each thematic section, reference papers were selected based on the citation impact, representativeness of technical approaches, and their demonstrated effectiveness in addressing practical agricultural challenges..
Finally, by comprehensively considering factors, including publication year, research content, practical value in addressing agricultural challenges, and academic citation impact, 65 publications remain from this refined pool and serve as the core references for systematic analysis and discussion. Figure 2 shows the proportional distribution of these references across different research themes, providing a visual representation of current research in agricultural intelligence.
3. Crop Perception
3.1. Evolution of DL Models for Intelligent Crop Disease Perception
The adoption of DL in crop monitoring represents a gradual evolution, driven by continuous advancements in model architectures, data acquisition technologies, and increasingly complex agricultural requirements.
This evolutionary journey of DL models is inextricably linked to the driving force and support of large-scale, high-quality datasets. From early benchmark datasets collected in laboratory environments to the recent construction of multi-modal, fine-grained annotated datasets in complex field settings, the evolution of data resources directly determines the upper limits of model performance and the boundaries of practical deployment (Table 1). These datasets have greatly facilitated fair comparison and iterative innovation of algorithms by providing standardized evaluation benchmarks.
As shown in Table 1, the development trajectory of datasets and the evolution of models are mutual reinforcing. Early datasets like PlantVillage enabled the application of convolutional neural network (CNN) in disease classification, yet their limitations in laboratory settings spurred the creation of more field-realistic datasets like CropDeep. More recently, multi-modal datasets, such as SoybeanNet (RGB-D), WeedMap-3D (RGB+LiDAR), and AgriSeg-V2 (hyper-spectral) have provided new data foundations by fusing geometric, spatial, and spectral information to address complex field challenges and achieve fine-grained perception, directly propelling the technological breakthroughs discussed later in this section.
A clear trajectory of technological development for DL in crop monitoring is evident. Its focus has expanded from early-stage single disease classification to encompass a full-chain capability covering fine-grained pest/disease segmentation, growth dynamics assessment, and multi-stress collaborative monitoring. Overall, it exhibits distinct characteristics of continuously improving accuracy, broadening application scenarios, and increasingly lightweight deployment. Figure 3 outlines key application milestones and technological breakthroughs in DL for crop monitoring.
Prior to 2019, the application of DL in crop monitoring was in its initial stages of proof-of-concept and data accumulation. Its development was primarily driven by relatively singular machine vision tasks, with a core focus on image classification of single crop diseases. CNN served as the core technology, addressing the traditional pain point of low efficiency in manual feature extraction. Research during this phase often relied on datasets from controlled laboratory environments, resulting in limited model generalization and field practicality, but it laid the groundwork for subsequent technological development.
In 2015, Long et al. proposed the fully convolutional network, breaking the limitations of traditional CNN for image classification and enabling pixel-level segmentation of crop disease lesions. This provided an architectural foundation for subsequent fine-grained monitoring, demonstrating the potential of DL to extend from category judgment to spatial localization in crop monitoring[12]. To address the small sample challenge, Too et al. (2018) proposed a crop disease recognition scheme based on transfer learning, reducing reliance on large-scale annotated data and offering a technical pathway for data-scarce scenarios relevant to smallholder farmers[13]. However, DL applications in this phase still suffered from a disconnect with field conditions. Model performance heavily depended on controlled laboratory environments, and when faced with complex field background interference, variable lighting conditions, and target occlusion, their recognition accuracy and robustness significantly declined. This became a core direction for subsequent technological optimization.
From 2019 to 2021, the application of DL in crop monitoring entered a phase of rapid development. The research focus shifted from single disease classification towards multi-crop, cross-scenario adaptation and pest/disease localization and segmentation. Concurrently, the integration of multi-source data such as hyper-spectral imagery and UAV data significantly enhanced model practicality. Two-stage detection models, such as Faster R-CNN, and generative models, such as generative adversarial network became key technological breakthrough points.
Picon et al. (2019) proposed a crop-conditioned CN, effectively addressing the industry challenge of confusing similar disease symptoms across different crops[14]. Subsequently, Kerkech et al. (2020) combined the SegNet model with UAV-based hyper-spectral data, propelling DL from ground-based fixed-point monitoring to the scenario of orchard-wide large-scale survey[15]. Nazki et al. (2019), targeting data scarcity, proposed a generative adversarial network-based strategy for generating crop disease images, improving model generalization ability in low-sample scenarios by 25% and providing a solution for monitoring diseases in minor crops[16]. The technical characteristics of this phase underwent a significant shift, moving gradually from single models towards discriminative and generative models. Data expanded from RGB images to include UAV-based hyper-spectral imagery, and monitoring scenarios extended into actual field environments. Both the practicality and accuracy of the technology achieved a qualitative leap.
From 2022 to present, the application of DL in crop monitoring has entered a mature stage. Core trends are characterized by the formation of full-chain monitoring capabilities, the push for lightweight deployment in the field, and the deep fusion of multi-modal data. Technology has begun to truly move to the field, addressing practical agricultural production problems. The technology in this stage is no longer content with single detection/recognition but shifting towards integrated architectures aimed at decision-making. For real-time pest monitoring and field deployment, Ahmad et al. (2022) systematically compared the performance of single-stage detection models, such as You Only Look Once (YOLO) for 23 agricultural pests. Based on their self-constructed dataset containing 7046 field pest images, YOLOv5x performed best, achieving a mean average precision of 98.3% with an inference speed of only 40.5 ms. Crucially, it could be deployed for real-time detection via a smartphone camera. This study first achieved the practical deployment of a DL model in a mobile device + field scenario, providing precise target locations for variable-rate spraying robots, potentially reducing pesticide use by 30% to 40%[1]. In the area of multi-stress collaborative monitoring and multi-modal fusion, Shoaib et al. (2025) designed a Transformer plus multi-source data fusion architecture. It integrates satellite RS (macro growth status), UAV multi-spectral (plot-level disease), and soil sensor (nutrient status) data to construct a dynamic model linking environment and crops, providing an integrated solution for pest/disease - nutrient stress collaborative monitoring[17]. Currently, DL achieves full-chain coverage from pest/disease detection to growth stage classification and yield prediction, providing comprehensive decision support for precision farm management.
In summary, DL has enabled a fundamental transformation in crop disease monitoring from qualitative judgment reliant on visual inspection to data-driven quantitative, fine-grained perception. However, the further development of this technological path still faces three core bottlenecks. First, the conflict between the model’s strong data dependency and the scarcity of high-quality annotated data in the agricultural domain, which is particularly acute for rare diseases and in smallholder farming scenarios. Second, insufficient model generalization capability leads to significant performance fluctuations when applied across different crop varieties, growing environments, and climatic regions. Finally, how to effectively deploy complex models with substantial computational demands onto edge devices with limited computing resources in the field. Future research needs to focus on directions such as few-shot learning, domain adaptation, and model light-weighting to overcome these practical constraints.
3.2. UAV-Enabled Fine-Grained Agricultural Perception
UAV has become an indispensable component within smart agriculture systems, owing to the advantages of high mobility, extensive monitoring coverage, and timely data acquisition. Their application in agriculture is deepening, playing a vital role in areas, such as crop pest/disease monitoring, growth status assessment, and resource stress evaluation. This is driving a transformation in agricultural production from traditional experience-based models towards data-driven precision approaches.
Figure 4 illustrates the systematic pathway of UAV in agricultural perception. The UAV platform equipped with heterogeneous sensors, such as RGB, multi-spectral, thermal infrared, hyper-spectral and LiDAR, enables fine-grained perception of various crop parameters, including pests/diseases, growth vigor, water stress, nutrient status, and 3D morphology, respectively. These perception directly support intelligent decision making, such as precise pesticide application, variable-rate fertilization, smart irrigation, nutrient regulation, and growth modulation. These decisions, in turn, guide the precise operations of agricultural robots at the execution layer. Concurrently, the outcomes of these executed operations can be fed back to the perception layer, facilitating the continuous optimization of perception models and decision algorithms. This process forms a closed-loop PDE system.
3.2.1. Precise Crop Pest/Disease Detection: From Macro-Scale Identification to Micro-Scale Lesion Segmentation
Crop pests and diseases represent the primary biotic stress factors leading to yield loss. UAVs equipped with various types of sensors and DL algorithms have facilitated the transition from manual visual inspection to precise localization, making this one of the most mature application scenarios in agricultural monitoring.
In the initial phase, UAV-based pest and disease detection focused on macro-scale category identification, relying on RGB imagery and CNN models. For instance, Liu et al. (2018) utilized a UAV-mounted RGB camera to capture wheat canopy images and developed a detection model for powdery mildew using a stochastic coefficient regression model, enabling accurate assessment of disease severity and laying the groundwork for large-scale disease surveys[18]. Lan et al. (2020) acquired multi-spectral images of citrus orchards via UAV, constructed a detection model for Huanglongbing (citrus greening disease), and showed the advantage of multi-spectral data in orchard disease identification. However, the capability of these models for detecting pest and disease was limited, and these models often depended on manually designed features (e.g., vegetation indices, texture features)[19].
The subsequent development phase witnessed the integration of hyper-spectral sensors with DL, driving pest and disease detection towards greater micro-scale precision. Abdulridha et al. (2020) mounted a hyper-spectral camera on a DJI Matrice 600 Pro UAV. Targeting different infection stages of powdery mildew in squash, they employed a radial basis function neural network to achieve classification accuracy of 89% for early-stage and 96% for late-stage infections, respectively. This validated the sensitivity of hyper-spectral data to early physiological changes induced by disease[20]. Furthermore, addressing scenarios with multiple co-occurring diseases, Nahiyoon et al. (2020) used a hexacopter UAV equipped with a thermal infrared camera. Combined with a biocidal radius model, they achieved collaborative detection of cotton aphids and powdery mildew, providing precise target locations for variable-rate pesticide application[21].
More recently, disease detection has advanced further to achieve pixel-level segmentation. Bhujel et al. (2022) applied a U-Net model to segment images of strawberry gray mold obtained by UAV. Through the optimization of batch normalization layers, they achieved a lesion segmentation accuracy of 96.08% against complex backgrounds, providing robust support for the quantitative assessment of disease severity[22].
However, UAV-based pest/disease detection, reliant on single RGB imagery or basic multi-spectral data, often suffers from missed detection when identifying small-target pests or segmenting lesions in complex backgrounds. Some studies propose solutions to these limitations. In 2025, Huang Y et al. proposed the YOLO-YSTs lightweight model, specifically optimized for images of yellow sticky traps captured by UAV. By enhancing small-target capture capability through a feature pyramid network, the model achieved a significant increase in detection speed, successfully overcoming the computational bottleneck for edge device deployment and the challenge of small-target omission. This enables direct application in real-time, in-field pest monitoring scenarios[23]. A review study by Sharma H et al. (2025) indicated that fusing UAV-based thermal imaging, multi-spectral technologies, combined with ML algorithms, enables the collaborative monitoring of pests/diseases and water stress in specialty crops. For example, in vineyards, this integrated approach achieved over 90% accuracy in precision irrigation-coupled pest/disease identification, significantly outperforming results from single-sensor monitoring[24]. Building upon these research advancements, coupled with the recent development of multi-modal fusion large model architectures—although primarily focused on agricultural knowledge question answering—the underlying fusion strategies for integrating text, images, and audio can be effectively transferred to the domain of pest and disease detection. By extracting lesion features from UAV-captured imagery and integrating with agricultural knowledge graphs, a closed-loop service encompassing “detection, diagnosis, and solution” can be established, thereby extending the technical value of UAV-based perception.
3.2.2. Dynamic Crop Growth Monitoring: From Morphological Observation to Physiological Parameter Retrieval
Dynamic crop growth monitoring requires real-time acquisition of morphological and physiological parameters, such as plant height, leaf area index, and chlorophyll content, to inform management decisions during key growth stages (e.g., fertilization, pruning). Intelligent UAVs, through multi-sensor data fusion and ML algorithms, are facilitating a shift from destructive sampling towards non-contact sampling.
In the domain of morphological parameter monitoring, early research focused on extracting geometric features from RGB images. For instance, Yang et al. (2015) utilized a multirotor UAV equipped with an RGB camera to rapidly estimate wheat plant height and canopy coverage through image stitching and texture analysis, achieving a 60-fold increase in operational efficiency in comparison to manual measurements[25]. Yinka-Banjo et al. (2019) extracted parameters such as maize canopy volume and coverage from UAV RGB imagery to achieve automatic growth stage classification with an accuracy of 91%. While this phase enabled the acquisition of macro-scale morphological parameters, it had limited capability to reflect the internal physiological state of crops[26].
Post-2020, the application of multi-spectral and light detection and ranging (LiDAR) sensors has extended growth monitoring into the physiological domain. Marin et al. (2021) extracted vegetation indices, such as green ratio vegetation index and normalized difference vegetation index, from UAV-based multi-spectral imagery. By integrating these with a decision tree model, they constructed a growth monitoring model under coffee rust stress, which could not only identify the disease but also simultaneously retrieve leaf chlorophyll content, and thereby, informing nutrient supplementation strategies[27]. Lin et al. (2021) enhanced precision by fusing LiDAR and multi-spectral data acquired via UAV to capture the three-dimensional structure and spectral information of maize canopies, achieving a 15% improvement in accuracy compared to using RGB data alone[28].
In recent years, DL has advanced the accuracy and generalizability of parameter retrieval. Feng et al. (2022) employed a hexacopter UAV equipped with a thermal infrared camera to monitor wheat canopy temperature in real-time. Combined with a CNN model, they retrieved leaf transpiration rates, providing a quantitative metric for assessing growth vigor during the grain-filling stage[29]. Bouguettaya et al. (2022) proposed a lightweight model based on MobileNet for automatic feature extraction from UAV multi-spectral imagery, enabling the simultaneous estimation of plant height and biomass for three crops of wheat, maize, and rice. This model reduced parameters by 60% compared to traditional CNN, making it suitable for deployment on edge devices for real-time monitoring[30].
Precise retrieval of crop growth parameters remains a core direction for advancing UAV-based monitoring. Recent studies continue to refine this approach. In 2025, Y. Liu et al. proposed a feature combination extraction method to construct a crop growth monitoring index for potato growth monitoring. By fusing UAV hyper-spectral data with agronomic traits, such as plant height and leaf count, they improved yield estimation accuracy by 15% compared to traditional single-spectral indices, validating the advantage of co-retrieval using spectral data plus agronomic parameters[31]. A concurrent review by Y. Wang et al. systematically summarized the application progress of UAV spectral sensors in estimating crop biomass, leaf area index, and nitrogen content. It identified that fusion strategies combining UAV and ground-based proximal sensing data can control leaf area index retrieval error within 5%, providing a reliable technical pathway for the quantitative retrieval of growth parameters[32].
3.2.3. Resource Stress Assessment: Rapid Diagnosis of Water and Nutrient Stress
Water and nutrient stress are major abiotic factors affecting crop growth. Traditional assessment methods rely on manual sampling, which is time-consuming and destructive. A UAV equipped with thermal infrared and hyper-spectral sensors and coupled with data-driven algorithms enables rapid localization and severity grading of stress, and thereby, providing decision support for precision water and nutrient management.
In water stress monitoring, early research utilized thermal infrared data. For example, Gago et al. (2015) employed a UAV-mounted thermal infrared camera to retrieve crop transpiration rates from canopy temperature, identifying water-stressed zones in maize fields to guide variable-rate control of drip irrigation systems[33]. However, this method struggled to disentangle the confounding effects of water stress from other stressors, such as nutrient deficiency.
Post-2018, hyper-spectral data and multi-source fusion techniques have addressed the issue of stress-type confusion. As reviewed by Golhani et al. (2018), UAV-based hyper-spectral data (e.g., 780-2500 nm bands) can distinguish between water stress and nitrogen deficiency in maize by analyzing absorption features related to O-H and C-H bond vibrations in leaves[34]. Feng et al. (2021) further advanced this by fusing hyper-spectral and thermal infrared data. Using a UAV to acquire wheat canopy spectral information (e.g., red-edge bands) and temperature data, they constructed a co-stress assessment model for water and nutrients. This model not only locates stress zones but also quantifies stress severity, providing a precise solution for integrated water and fertilizer management[35].
Recently, the integration of lightweight algorithms and edge computing has driven stress assessment towards real-time capability. Hu et al. (2022) proposed a wavelet transform-based method for hyper-spectral data dimensionality reduction. Combined with a random forest (RF) algorithm deployed on a UAV platform, they achieved real-time diagnosis of cotton water stress with an inference time shortened to 20 ms, meeting the demands of dynamic field monitoring[36]. Xu et al. (2022) utilized UAV multi-spectral imagery combined with a Transformer attention mechanism, focusing particularly on changes in the crop red-edge band (705-740 nm). This approach enabled the early identification of nitrogen stress in sugarcane with 92% accuracy, providing spatio-temporally variable guidance for precision fertilization[37].
Against the backdrop of increasing frequency of extreme climate events, the demand for early diagnosis of crop resource stress is becoming ever more urgent. For instance, F.G. Okyere et al. (2024) in a study on wheat found that a novel vegetation index constructed from UAV hyper-spectral data, combined with a RF model, could achieve co-monitoring of drought and nitrogen stress with an accuracy exceeding 0.94. This effectively overcame the performance degradation of traditional vegetation indices in multi-stress scenarios[38]. A 2025 joint report by the Food and Agriculture Organization (FAO) and World Meteorological Organization (WMO) emphasized that extreme heat has become a key factor exacerbating crop water stress. UAV-based thermal imaging technology, capable of real-time canopy temperature monitoring with an error margin controlled within 1 °C, provides precise, real-time data to support field irrigation decisions, highlighting its application value in climate change-adaptive agriculture[39].
In summary, machine vision-based crop perception technologies, particularly the deep integration of DL and UAV, have successfully transitioned from laboratory research to field practice. These technologies have not only significantly enhanced the accuracy and efficiency of pest/disease identification and segmentation but also enabled the fine-grained, quantitative retrieval of crop growth parameters and resource stress status. They provide unprecedented large-scale, multi-dimensional data support for precision agricultural management. However, the ultimate value of perception technology lies not merely in “seeing” and “diagnosing” but in how this information is used to drive efficient agricultural operations. Currently, perception technology is evolving from standalone detection/identification functions towards tightly coupled integration with decision-making and execution systems. This progression naturally leads our discussion to the next critical component: how to build intelligent decision models based on this perceptual data and ultimately drive autonomous agricultural equipment to perform precise operations.
4. Intelligent Agricultural Decision-Making Based on Data-Driven Prediction, Regulation, and Planning
Scientific rigor and timeliness of agricultural decision-making determine production efficiency, resource utilization, and economic returns. Experience-dependent decision models are increasingly inadequate for addressing the complex, variable agricultural production environment and the demands of large-scale cultivation. Advances in ML technologies for analyzing multi-source data, uncovering complex relationships and performing dynamic prediction provide fundamental support for transitioning experience-driven to data-driven agricultural decision-making.
Based on the literature, at the decision-making layer, we review how ML models integrate multi-source data, such as meteorological recordings, soil measure, RS data, and market data, to achieve full-chain decisions ranging from yield prediction and pest/disease early warning to water/fertilizer prescription and planting planning. Table 2 shows multi-source data-based agricultural intelligence.
4.1. Intelligent Agricultural Decision-Making via Multi-Source Data Fusion
Building upon the multi-dimensional information acquired by the perception layer, the core of agricultural intelligent decision-making is transforming data into actionable management strategies. The agricultural decisions determine production efficiency, resource utilization, and economic returns. On one hand, traditional decision models reliant on experience are increasingly inadequate for addressing complex, variable agricultural production environment and the demands of large-scale cultivation. On the other hand, the performance of ML models is highly dependent on accessible high-quality, multi-dimensional input data. Therefore, constructing a multi-source data system that covers the entire agricultural production chain and resolving its inherent heterogeneity is the primary prerequisite for achieving intelligent agricultural decision-making. This section reviews four core categories of data, meteorological, soil, RS, and market data, focusing on their acquisition technologies, characteristics, current state of integration in decision models, and the associated challenges.
4.1.1. Meteorological Data for Dynamic Environmental Recording
Meteorological data are critical factors, characterizing dynamic environment for crop growth. Their acquisition has evolved from traditional manual point observations to a three-dimensional monitoring network comprising ground-based automatic weather stations, satellite RS, and numerical weather prediction models [40]. This evolution has significantly improved the spatio-temporal resolution and acquisition efficiency of the data. For instance, European Union’s coordinated use of Sentinel satellite series and ground stations enables daily updates of meteorological parameters at a kilometer-scale grid level, providing reliable data support for regional-scale thermal time calculations and drought early warning [41]. Notably, the fusion of numerical weather prediction and ML represents a new trend for prediction accuracy enhancement. Time-series models, such as long short-term memory (LSTM) networks, are used to correct forecast errors. For example, in the Heilongjiang land reclamation area, such models have controlled the prediction bias for accumulated temperature during key growth stages to within 5% [40]. However, the accuracy of data interpolation in areas with complex topography and the representativeness of historical data under future climate change scenarios remain major challenges for meteorological data application.
4.1.2. Soil Data for Fine-Grained Characterization of Crop Growth Substrate
Soil data aim to finely characterize the substrate environment for crop growth. Its acquisition technology has evolved from laboratory chemical analysis to portable sensing and, more recently, to RS retrieval, achieving a breakthrough from “point” to “area” monitoring. Prior to 2015, methods relied mainly on manual profile sampling and laboratory analysis, offering high accuracy but suffering from long sampling cycles and poor spatial representativeness. Around 2016, visible-near-infrared spectroscopy enabled rapid soil property detection. Morellos et al. (2016) used this technology to increase the efficiency of measuring soil organic carbon and total nitrogen content by 20-fold compared to traditional methods, with measurement errors controlled within 3%-5%. The combination of ground sensor arrays and UAV-based hyper-spectral RS has enabled dynamic monitoring[42]. For instance, Padalalu et al. (2017) deployed a network of soil moisture and pH sensors in a wheat field and integrated the data with UAV hyper-spectral imagery to construct a spatio-temporal model of soil nutrient dynamics, providing real-time data support for precision fertilization[43].
Despite significant technological progress, soil data acquisition remains constrained by the fundamental conflict between “point” and “area”: high-accuracy point measurements are costly, while area-wide data obtained via RS or interpolation suffer from accuracy loss and uncertainty. Recently, spatial extrapolation using geostatistical methods like Kriging interpolation or ML algorithms has become a primary means to compensate for data sparsity, though its accuracy in highly heterogeneous fields still requires improvement.
4.1.3. RS Data for Multi-Scale 3D Perception of Crop Information
Remote sensing establishes a coordinated multi-scale crop information perception system involving satellite, UAV, and ground platforms, and is key to non-destructive monitoring of crop growth phenotypes. Satellite RS (e.g., Sentinel-2, Landsat-8) excels at macro-scale, periodic regional monitoring. UAV RS, leveraging its flexibility and centimeter-level resolution, plays an irreplaceable role in field-scale tasks such as early disease identification (e.g., using red-edge bands to detect powdery mildew) and nutrient stress diagnosis[20]. Ground-based RS platforms, such as portable spectrometers and phenotyping vehicles, are used for ground-truth validation. Data from portable spectrometers, for example, can serve as calibration references for indices retrieved from UAV multi-spectral data. The fusion of multi-platform data is a current research focus. For instance, combining temporal sequence advantages of Sentinel-2 with spatial detail advantages of UAVs provides a comprehensive characterization of crop growth. Future directions involve developing efficient multi-modal data fusion algorithms (e.g., based on attention mechanisms) to deeply integrate spectral, textural, and temporal information, while mitigating environmental impacts like cloud cover.
4.1.4. Market Data for Dynamic Feedback of Supply-Demand and Policy
Market data serves as a critical input for agricultural planning decisions. Its acquisition has shifted from static statistical reports to real-time dynamic scraping. Traditional data relied on annual/quarterly reports from government departments, which were authoritative but lacked timeliness, making them unsuitable for supporting short-term planting adjustments. Current approaches involve real-time integration from multiple platforms, including daily transaction price and volume data from wholesale market electronic trading systems; demand indicators such as search volume and order quantity from e-commerce platforms; futures market prices; and open government policy data. For example, Shaikh et al. (2022) integrated Indian government tomato cultivation subsidy policies with e-commerce platform demand data to construct a multi-objective optimization model. This model achieved a balance between policy compliance and profit maximization, increasing farmers’ average annual income by 15%[40].
A notable challenge is the inherent heterogeneity of multi-source data, such as meteorological data are structured time-series, RS images are unstructured, and market reports are semi-structured text. Spatiotemporal scale mismatches also exist. The current common solution involves a preprocessing pipeline of data fusion, to feature extraction and spatiotemporal alignment. This employs multi-modal fusion algorithms to integrate different data types, uses CNN to extract spatial features from images and LSTM to extract temporal features from time-series data, and finally applies spatiotemporal interpolation to unify all data to a standardized field-day scale for input into decision models.
Heterogeneity and redundancy in multi-source agricultural data remain core bottlenecks limiting the accuracy of intelligent decision-making. Recent studies propose advanced solutions. In 2025, M. Saki et al. proposed a Transformer-based multi-source data fusion framework to address the spatiotemporal heterogeneity between satellite and UAV RS data. It improved data integration efficiency by 40%, significantly outperforming traditional fusion algorithms, like CNN and LSTM. A concurrent study by Jiang Jingchi et al. proposed an agricultural LLM, which uses a knowledge graph to effectively filter multi-source agricultural data and precisely extract key rules, such as soil-crop relationships[44]. This reduces interference from data redundancy, improving model output accuracy by 9.84% and offering a novel technical solution for data quality control. U.S. Agricultural Research Service (ARS) in 2025 proposed a RL plus LLM fusion framework. It achieves cross-modal data synergy by using the LLM to process unstructured data like farmers’ natural language requests and RL to optimize decision strategy responses, reducing data governance time by 30% and providing a viable path for fusing textual and structured data[45].
Despite numerous approaches for processing multi-source data, their effective integration remains an unresolved challenge. The current predicament manifests in three dimensions. At the data level, heterogeneous (image, time-series, and text), multi-source (space, air, and ground), and multi-scale data lack a unified standardized description system. At the technical level, existing fusion methods mostly remain at the data or feature level, with insufficient exploration of decision-level fusion that uncovers deep causal relationships between data. At the application level, a gap often exists between the spatiotemporal resolution of data and the real-time requirements of decisions. Therefore, developing more intelligent paradigms for multi-modal data fusion and governance is required to advance agricultural decision-making from available having data to using data effectively.
4.2. Predictive Decision-Making by ML-Based Dynamic Yield Prediction
Crop yield prediction is a critical component of agricultural decision-making, and its accuracy affects the effectiveness of planting planning, supply chain scheduling, and market regulation. In recent years, research focus has gradually shifted towards the technical pathway of multi-source data fusion and time-series model optimization. By integrating heterogeneous data from sources, such as RS, meteorology, and soil, and employing DL models, like LSTM and Transformer, this kind of approach effectively captures the spatiotemporal dynamics of crop growth, significantly enhancing yield prediction accuracy.
To achieve high-precision prediction, input data must meet the requirements of spatiotemporal alignment and feature complementarity. On the temporal dimension, it is necessary to unify the sampling frequencies of data collected at different rates. Spatially, methods such as georegistration (e.g., GPS-based image stitching) and spatial interpolation (e.g., Kriging, Inverse Distance Weighting) are commonly employed to align discrete point-sampled data with continuous raster data[41]. In soybean yield prediction, Maimaitijiang et al. (2020) fused RGB, multi-spectral, and thermal infrared data acquired by UAVs. Through data-level fusion, they effectively corrected systematic sensor errors, reducing the prediction error by 18% compared to using a single data source[2].
The precision and interpretability of yield prediction is crucial for practical application. A 2025 study on winter wheat in Pakistan integrated five RS indices with climatic variables including accumulated temperature and precipitation. Using an XGBoost model, it achieved yield prediction with a coefficient of determination of 0.89, significantly outperforming traditional models, like linear regression. A comparative study focused on the interpretability of prediction models to explain the decision-making process of the yield prediction model, and “NDVI during the grain-filling stage” and “precipitation during the jointing stage” were identified as the core factors affecting yield. This approach addresses the trust issue associated with traditional “black-box” models[46].
Current approaches rely on time-series signal analysis to solve long-term dependency modeling and capturing dynamic changes, and LSTM is widely used for yield prediction. Chu and Yu (2020) combined meteorological time-series data and crop growth data using a hybrid architecture of LSTM and a neural network, and the convergence speed of rice yield prediction was improved by 40% and the root mean square error was reduced to 0.05[47]. Conversely, Transformer leverages self-attention mechanisms to identify key features during critical growth stages. In corn yield prediction in Northeast China, it selects key factors, such as accumulated temperature during grain-filling and precipitation during jointing, improving prediction accuracy by 5%–8% compared to LSTM[41].
Yield prediction models have achieved coverage from the field scale to regional scale. At the field scale, Nevavuori et al. (2019) achieved early wheat yield prediction using only UAV RGB imagery and a CNN model[48]. At the regional scale, Sagan et al. (2021) utilized multi-temporal satellite data from WorldView-3 (4 scenes) and PlanetScope (25 scenes) combined with 2D/3D deep models, explaining 90% of the yield variation at the field scale and providing a reliable tool for regional food security assessment[49]. Furthermore, the fusion of Synthetic Aperture Radar (SAR) and optical data can effectively enhance prediction robustness in cloudy regions. Adrian et al. (2021) used a 3D U-Net model to fuse Sentinel-1 SAR and Sentinel-2 optical data, achieving an overall accuracy of 0.941 for corn yield prediction, which represents a 12% improvement over using optical data alone[50].
Current yield prediction models face two major challenges. First, due to insufficient generalization capability, when applied across different regions, accuracy decreases due to shifts in feature distributions. Second, because of limited responsiveness to extreme weather events, such as typhoons and hailstorms, models struggle to quickly adjust parameters to adapt to abrupt changes in crop growth characteristics. And thus, research trends are concentrating on introducing transfer learning methods to enhance cross-regional prediction accuracy through pre-training on source regions and fine-tuning on target regions. Simultaneously, efforts are being made to integrate real-time disaster monitoring data to construct dynamic updating mechanisms and to allow for rapid correction of prediction results following a disaster event.
4.3. Preventive/Protective Decision-Making: Pest/Disease Risk Prediction and Early Warning
As major biotic stress factors, timely accurate prediction of pests/diseases is crucial for crop loss reduction. Manual inspection methods suffer from lag and subjectivity, while ML enables early identification and spatial risk mapping by integrating historical occurrence data, meteorological factors, and RS imagery that provides decision support for precise prevention and control.
Input data for pest/disease prediction should encompass both environmental driving factors and biological occurrence characteristics. Meteorological data, such as temperature, humidity and precipitation are key for pest/disease outbreaks. Field data, obtainable via digital traps or UAV imagery, can capture pest/disease density and distribution. RS data, such as hyper-spectral and thermal infrared images, can detect early stress responses in crops.
To address temporal dynamics and spatial spread characteristics of pests/diseases, ML models have recently converged on two core methodologies, time-series analysis and GNNs. Time-series models, such as LSTM and GRU, are used to predict occurrence trends. Liu et al. (2022) used LSTM to fuse historical wheat powdery mildew occurrence data from the past five years with meteorological data of temperature, humidity, and precipitation and to predict disease occurrence probability for the next 15 days with 89% accuracy[51].
The timeliness and precision of pest/disease early warnings directly impact control effectiveness. In 2024, T. Ali et al. used LSTM to achieve accuracy 97% in predicting crop drought stress. Combined with pest/disease occurrence patterns, they constructed a stress-pest/disease linkage warning mechanism to overcome the limitations of traditional single-factor pest/disease warnings[52]. A study on Sri Lankan agriculture in 2025 showed that 44% of farmers were directly affected by pests/diseases, and extreme climate events, such as drought, could increase pest/disease risk by 7%. Using a RF model to identify high-risk areas achieved an area under the curve of 0.85, providing spatially precise guidance for targeted control[53]. The 2025 FAO and WMO report proposed a meteorological warning plus pest/disease monitoring linkage mechanism. By combining UAV real-time monitoring data with short-term climate forecasts, it extended the pest/disease warning lead time by 5-7 days, significantly improving the timeliness of control decisions[39].
The main bottleneck for current pest/disease prediction lies in data completeness. On one hand, field survey data rely on manual records, leading to issues of under-reporting or misreporting, such as misjudging mechanical damage as disease, which introduces significant noise into training data. On the other hand, microscopic data on pest dispersal, including insect migration paths and pathogen diffusion rates, are difficult to obtain, preventing models from accurately simulating the spread process. Future efforts need to combine automated monitoring equipment, such as insect monitoring lamps and UAV patrols, with data validation algorithms to improve data quality and support model optimization.
4.4. Regulatory Decision-Making: Prescription Generation for Precision Water and Nutrient Management
The excessive application of water and fertilizers in agriculture not only increases production costs but also leads to environmental issues, such as soil degradation and water eutrophication. Precision water and nutrient management is core to achieve increased yield, improved quality, enhanced efficiency, and environmental protection. ML-driven prescriptive decision models integrate soil fertility, crop growth status, meteorological conditions, and water/fertilizer use efficiency data to generate water and fertilizer application plans at the field-level or even plant-level, replacing the traditional one-size-fits-all approach. These models primarily fall into two categories, ML-based demand prediction models and optimization algorithm-based prescription optimization models, synergistically working for regulatory decision-making.
The core idea of ML-based demand prediction models is establishing quantitative relationship among crop demand, environmental supply and soil baseline to accurately calculate water and nutrient requirements at different growth stages. RF regression, known for its strong capability to fit nonlinear data and insensitivity to outliers, are widely used for predicting fertilizer and water requirements. In irrigation decisions, SVR-based models can predict crop water demand by analyzing soil moisture content from real-time sensor monitoring, canopy temperature from UAV thermal infrared data, and meteorological evaporation, thereby calculating daily irrigation needs to maintain soil moisture within the optimal range for crop growth.
Optimization algorithms, building upon demand predictions, generate optimal water and fertilizer prescriptions by incorporating economic costs, resource constraints, and environmental impacts. PSO is frequently used for prescription optimization due to its fast convergence and ease of implementation. Its core logic treats water/fertilizer application rates as particles and searches for the optimal solution within a feasible domain using multi-objective optimization for highest yield, lowest cost, minimal pollution. Additionally, genetic algorithms are employed in complex scenarios to simultaneously optimize irrigation timing, volume, and emitter spacing, achieving uniform water distribution and maximized use efficiency.
Prescriptive decision models have proven effective in greenhouse settings. For instance, the HortiMED-AI decision support system developed by Otazua (2022) uses sensors to collect real-time temperature, humidity, and soil nutrient data, combined with an ANN model to output irrigation and fertilization schedules. This system reduced water and fertilizer inputs by 20% while increasing tomato yield by 15% in the greenhouse[54]. However, the practical application of prescriptive decision models requires solving two key issues. First, local adaptation of the model, as different soil types and crop varieties across regions, necessitate targeted parameter adjustments. Secondly, the operationalizability of the prescription, as farmers may struggle to understand complex model outputs. Prescriptions need to translate nitrogen requirements into specific recommendations for compound or urea fertilizer amounts, combined with application timing and methods, to ensure they are easy to execute.
The personalization and spatial adaptation of water and fertilizer prescriptions are core requirements for precision management. A review by F. Mortazavizadeh et al. In 2025 systematically summarized the application progress of ML in agricultural water management, confirming that algorithms like SVR and RF, combined with RS data, can improve irrigation prescription accuracy by 25%, outperforming traditional formula calculations[55].
4.5. Planning Decision-Making: Synergistic Optimization of Planting Layout and Market Supply-Demand
Agricultural planning decisions encompass two levels of front-end planting layout and back-end market linkage. The former addresses questions of “what to plant, how much to plant, and where to plant”, while the latter focuses on decisions regarding “when to sell, to whom, and at what price”. Their synergistic optimization serves as the top-level design for agricultural production, enabling precise production-market matching and reducing resource waste and economic losses caused by supply-demand mismatches.
In front-end planting layout decisions, ML models need to integrate four categories of data of land suitability, climate adaptability, historical profitability, and resource constraints to generate scientific planting plans. Land suitability data include soil type, terrain slope, and irrigation conditions. Combining analytic hierarchy process with ML can quantify suitability scores for different crops on various plots. Climate adaptability data based on 30-year historical meteorological data, such as accumulated temperature, frost-free period, and probability of extreme weather, use classification models like RF and XGBoost to assess the match between crops and regional climate. In the EU, a RF model based on Sentinel-2 satellite data and soil data identified areas suitable for wheat cultivation, improving the alignment of planting plans by 25% (Mesías-Ruiz et al., 2023)[56].
In back-end market linkage decisions, ML is used to predict market supply-demand changes and price trends, providing a basis for sales strategy formulation. Price prediction models use historical price data, meteorological data, policy data, and consumption data as inputs, employing time-series models like LSTM to capture price change patterns. The FarmLogs platform integrates daily price reports from the USDA with regional yield data to build an LSTM price prediction model, providing farmers with a two-week advance corn price warning, reducing sales revenue volatility by 12% [40].
Supply-demand matching decisions utilize GNNs to construct an association network connecting producers, intermediaries, and consumers for efficient resource allocation. The model treats producers (with attributes of yield, variety, location), intermediaries (with attributes of storage capacity, transportation range, purchase price), and consumers (with attributes of demand category, quantity, procurement budget) as nodes. The connection weights between nodes are calculated based on distance cost (higher weight for shorter transport distance), price match (higher weight for smaller difference between purchase and expected sale price), and supply-demand match (higher weight for closer alignment between yield and demand quantity).
The foresight of planting plan and its adaptability to the market are key to improving agricultural profits. A 2025 review by A. Deo et al. identified core influencing factors for farm-level crop planning, including soil suitability and market prices, and pointed out that ML methods like multi-objective optimization could increase planning profits by 15%[57]. A 2025 study by A. Ali et al., combining the CA-Markov model with RS data, predicted a reduction in agricultural land in South Africa’s North West Province by 2033 and proposed planting layout adjustments prioritizing plots with good irrigation conditions, demonstrating the foresight of planning decisions[58]. The RL plus LLM fusion framework proposed by the U.S. ARS in 2025 uses LLMs to analyze market text data (e.g., e-commerce demand, policy subsidies) and RL to optimize the planting-sales linkage process, reducing the supply-demand mismatch rate by 30% and overcoming the planning limitation of focusing on production while neglecting the market[45].
The main challenges for current planning decision models lie in data timeliness and policy uncertainty. First, market data (e.g., sudden changes in consumption demand due to pandemics) update rapidly, requiring models to iterate at high frequency to maintain prediction accuracy. Second, adjustments in agricultural subsidies and land policies can significantly impact planting layouts, requiring models to dynamically adapt to policy changes. In the future, it is necessary to build a closed-loop system of real-time data update, automatic model training, and dynamic decision adjustment by connecting to government open data platforms and real-time e-commerce data interfaces, further enhancing the flexibility and practicality of planning decisions.
5. Autonomous Operation Execution: System Architecture and Intelligent Planning of Agricultural Robots
The value of intelligent decisions must ultimately be realized through precise physical operations. The autonomous execution capability of agricultural robots is the critical link that transforms smart agriculture from decision-making to implementation. Its core lies in integrating perception, decision-making, control, and execution functions via a modular system architecture and relying on navigation and planning algorithms adapted to complex field environments to accomplish precise operational tasks. This section focuses on the execution layer by elaborating on how an agricultural robot via a modular system architecture and advanced navigation and planning algorithms translates front-end perceptual information and mid-end decision commands into precise and efficient operational actions. Autonomous execution technology system of agricultural robots is described from system architecture, navigation and planning algorithms, and typical application scenarios, with a particular emphasis on recent application advancements of visual perception, SLAM and DL technologies.
Figure 5 illustrates the modular system architecture of an agricultural robot and its operational closed loop. The perception module acquires environmental information and self-state through multi-sensor fusion. The decision-making module based on perceptual inputs generates optimal operational paths using global and local path planning algorithms. The control and execution module converts decision commands into precise physical actions. These actions ultimately accomplish tasks in typical scenarios, such as precision spraying, intelligent harvesting and autonomous weeding. The assessment of operational effectiveness and the update of environmental states form a feedback loop, continuously optimizing system performance. This embodies the complete intelligent chain of agricultural robots, from environmental perception to operational execution.
5.1. Platform and System Architecture of Agricultural Robots
The system architecture and mobility platform of agricultural robots constitute the core hardware foundation for achieving autonomous and precise operations. With the rapid development of smart agricultural technologies, agricultural robots have evolved from single-purpose into integrated systems that combine perception, decision making, control, and execution. These systems are capable of adapting to unstructured field environments, replacing human labor in performing heavy, repetitive agricultural tasks. In this section, we systematically outline the classification of agricultural robot platforms and their system architectures for providing a framework for understanding the hardware basis of the robotic execution layer.
The architecture of agricultural robots typically follows the fundamental paradigm of perception, decision, control, execution supplemented by a communication module to facilitate internal and external data exchange. To adapt to the unstructured nature of agricultural environments, such as undulating terrain, dynamic obstacles and variable lighting, this architecture must possess a high degree of robustness and adaptability. Figure 6 shows a modular design that enables agricultural robots to adapt to a variety of agricultural scenarios from large-scale field operations to precision protected agriculture.
5.1.1. Agricultural Robot Work Platforms
Ground-based robots and UAV platforms feature differentiated configurations in module design and integration based on their distinct operational characteristics. The ground mobile platform serves as the primary chassis for agricultural robots and can be categorized into three main types of wheeled, tracked and rail-guided based on locomotion mechanisms. Agricultural UAVs, serving as aerial work platforms, hold a significant position within the agricultural robotics ecosystem primarily divided into two types of multi-rotor and fixed-wing UAVs.
5.1.2. Modular Analysis of the System Architecture
The architecture of agricultural robots typically follows the PDE paradigm supplemented by a communication module to facilitate internal and external data exchange. This architecture enables agricultural robots to perceive environmental information, perform intelligent decision-making, and accurately execute agricultural tasks. To adapt to unstructured agricultural environments, this architecture must be highly robust and adaptive.
The perception module serves as the front-end system for the robot’s interaction with the environment, responsible for acquiring environmental information and its own state to provide data support for decision-making. The perception system of an agricultural robot usually consists of multiple sensors, forming a multi-sensor fusion framework. Perception-layer sensors can be functionally categorized into positioning & attitude sensors and environment and operational state sensors. Table 4 summarizes extensive research conducted and their technical characteristics[40,60,61,62].
In recent years, multi-sensor fusion technology has been widely adopted to enhance the robustness of the perception system. This technology is increasingly applied in complex scenarios by leveraging the complementary features of the sensors mentioned above.
The decision-making layer acts as the core brain of the agricultural robot. Based on environmental and state data from the perception layer, it performs tasks, including path planning, operational parameter optimization, and motion control command generation. It must simultaneously satisfy three primary objectives: safety (obstacle avoidance), efficiency (shortest path), and precision (minimal operational error). Core technologies include path planning algorithms and operational control strategies, which will be detailed in the next section.
This module translates decision commands into physical actions, realizing robot’s motion control and operational tasks. It mainly comprises a motion controller, actuators, and communication interfaces. For task execution, agricultural robots are equipped with different end-effectors depending on the job requirements. Robotic arms are important actuators, and their functionality can be expanded by changing the end-effector. For instance, negative-pressure suction end-effectors are suitable for picking delicate fruits; scissor-type end-effectors for pruning; cavity-sleeve-type end-effectors for harvesting easily damaged produce; and flexible grippers can adapt to objects of varying shapes and hardness. The control system coordinates all components, typically employing a hierarchical control architecture. Lower-level controllers handle motor servo control, while upper-level controllers manage path tracking and task scheduling. With the widespread adoption of the robot operating system, the development of agricultural robot control systems has become more modular and standardized.
The communication layer is central to data transmission between internal modules of the robot and between the robot and remote platforms (cloud/base station). It must meet the requirements of long-range, low latency, high reliability in field scenarios. It is categorized into in-vehicle internal communication and remote communication. Internal communication facilitates real-time data exchange among perception, decision-making, and execution layers. Remote communication supports data transfer between the robot and cloud platforms, as well as for multi-robot collaboration. In recent years, the Cyber-Physical System architecture has been introduced into agricultural robot system design, forming a four-layer architecture encompassing the physical layer, network communication layer, data service layer, and user application layer. This architecture achieves a high degree of integration of computation, communication, control, and physical processes, offering security, reliability, real-time capability, and efficiency, providing new insights for agricultural robot system design. Concurrently, the End-Edge-Cloud collaborative robot system is also becoming a research hot spot, aiming to achieve intelligence and networking in agricultural robot systems through the collaborative work of cloud platforms, edge computing, and terminal devices.
5.2. Navigation and Path Planning Algorithms for Complex Environments
The autonomous navigation capability of agricultural robots is central to achieving precise operations, while the complexity and uncertainty of agricultural environments pose significant challenges to their navigation systems. These challenges stem from the inherently unstructured, dynamic, and uncertain nature of agricultural settings, which manifest as unstructured terrain (such as steep slopes, hills, and irregular crop rows), dynamic interference (such as temporary obstacles and multi-robot conflicts), perceptual noise (such as fluctuating light and GPS signal occlusion), and operational constraints (such as crop protection and soil compaction avoidance). To address these challenges, path planning algorithms must strike a balance between global optimality and local real-time performance, while fusing multi-source perceptual information to achieve stable and reliable autonomous navigation [63].
5.2.1. Global Path Planning for Unstructured Terrain
In unstructured terrains, such as steep slopes and mountainous areas, path planning must additionally consider multiple constraints, including terrain gradient, robot stability, and crop protection. Global planning algorithms achieve adaptive planning for macro-scale topography by embedding these constraints.
Addressing the challenges of irregular tree arrays and soft soil in oil palm plantations, Juman et al. (2017) employed a cell decomposition method combined with the D* Lite algorithm. By dynamically updating the grid costs, such as assigning high cost to areas with low soil bearing capacity, they achieved dynamic path adjustment in unknown environments. This approach yielded a navigation success rate of 92% in plantations with 2 to 3 meter tree spacing, while controlling path deviation caused by wheel slip to within 0.2 meters[64]. Furthermore, Yan et al. (2018), focusing on energy consumption optimization in 3D unstructured terrain, proposed a path planning scheme based on an artificial potential field. The scheme converts elevation differences into virtual repulsive forces, guiding the robot to avoid slopes steeper than 30° and protruding obstacles. Simulation results in a mock field showed this algorithm could reduce energy consumption by 20% to 25% compared to a straight-line path, effectively extending the operational endurance of agricultural machinery[65]. For operation in steep vineyards with slopes exceeding 25°, which carries a high rollover risk, Santos et al. (2019) proposed a center-of-mass-aware improved A* algorithm. The algorithm divides the terrain into safe grids via cell decomposition and incorporates robot center-of-mass offset into the cost function for limiting the robot’s roll and pitch angles within 15° and 10°, respectively, while simultaneously avoiding soil compaction-sensitive zones. Experiments showed a 95% path planning success rate in a 100 m × 50 m steep vineyard, with processing times of 0.06 to 0.26 seconds. The deviation between the actual traveled trajectory and the planned path was less than 0.1 meters, effectively preventing crop damage and robot rollover[66].
5.2.2. Local Perception and Planning in Perception-Limited Environments
In scenarios with missing or degraded GPS signals, including greenhouses and under dense orchard canopies, visual navigation and visual SLAM technologies become the core solutions, enabling continuous navigation through local environment perception.
Bai et al. (2023) demonstrated that a system based on stereo cameras can construct dynamic environment maps by extracting feature points from crop trunks and foliage, while fusing IMU data to compensate for robot motion errors. In tests conducted in passion fruit and lychee orchards, this system maintained centimeter-level positioning accuracy even without GPS signals, supporting autonomous obstacle avoidance for harvesting robots moving between crop rows, with a path tracking accuracy of 93%[62]. In dynamic environments, such as greenhouses, RGB-D sensors combined with a dynamic window approach can further handle real-time dynamic obstacles. For instance, in a greenhouse pollination robot, depth information from a RGB-D camera effectively identifies temporary obstacles, such as personnel and tools. The dynamic window approach can evaluate the robot’s velocity and steering angle within 0.5 seconds, generating collision-free local paths to ensure complete and non-redundant coverage of pollination points. To address visual perception errors caused by fluctuating lighting, Rovira-Más et al. (2007) proposed a pre-processing scheme involving multi-spectral and color calibration. By fusing the excess green index and excess red index, this method suppressed errors in vegetation/soil segmentation caused by strong light and shadows, providing stable crop row features for subsequent line detection. Under various lighting conditions at dawn, noon, and dusk in a cornfield, this scheme maintained crop row detection accuracy above 90%[67].
5.2.3. Dynamic Multi-Robot Coordination and Operational Path Optimization
With the increasing application of multi-robot systems in agriculture, path planning algorithms must consider both individual path efficiency and system-level conflict resolution, while meeting specific agronomic requirements.
Wang et al. (2025) proposed an improved artificial potential field-ant colony fusion algorithm to address dynamic obstacles, such as other machinery and animals, in multi-machine operations. This algorithm adjusts the repulsive potential field function by introducing a target distance weight to avoid the local minima problem of traditional potential fields while leveraging the global search capability of the ant colony algorithm It marked passed nodes in a tabulate list and updated pheromones using an ant-cycle model to achieve global path optimization and conflict avoidance. Results from 50 dynamic tests showed a 98% path planning success rate, an average path length of 4506 meters, and a runtime per cycle of 0.33 seconds, significantly outperforming comparative genetic algorithm and neural network approaches[32]. Talami et al. (2025) addressed the challenge of precisely matching machine operating width to crop rows by proposing a UAV image-based automatic waypoint generation scheme. This scheme constructs a binary vegetation mask from orthophotos of a sugar beet field acquired by UAV, fills gaps caused by sparse vegetation using morphological closing operations, smooths the green pixel density signal via Gaussian convolution, and recovers missing crop rows based on peak detection and row spacing completion. Subsequently, U-turn paths are dynamically generated based on the machine’s operating width. In tests on paved surfaces with simulated crop rows, a skid-steer Unmanned Ground Vehicle demonstrated a path tracking error of less than 0.2 meters, with no crop damage, and was able to handle positioning compensation during brief GPS signal interruptions[68].
5.2.4. Multi-Sensor Fusion for Enhanced Navigation Reliability
Navigation reliability in complex environments heavily relies on multi-sensor fusion technology to overcome the limitations of single sensors for providing a robust perceptual foundation for path planning.
On autonomous all-terrain vehicle navigation, Padhiary et al. (2024) emphasized the need for vision, IMU and LiDAR fusion to handle multi-interference scenarios. Vision sensors provide crop row and obstacle features, IMU compensates for motion errors during GPS loss, and LiDAR constructs precise 3D terrain models. This approach achieved a 98% navigation success rate in a hilly wheat field, a 20% improvement over vision-only navigation[69]. Bai et al. (2023) also validated the advantage of thermal imaging and RGB fusion. Thermal cameras achieved 85% obstacle identification accuracy in low-light or smoky environments, and its fusion with RGB images further improved this rate to 92%, providing stable perceptual input for path planning during nighttime plant protection operations[62].
In summary, facing the challenges of complex agricultural environments, navigation and path planning algorithms have gradually evolved into a systematic development framework characterized by terrain adaptation, real-time perception, multi-objective optimization, multi-technology fusion. Specifically, global planning algorithms address macro-topographic complexity through refined terrain modeling and multi-constraint embedding, local planning algorithms handle real-time environmental interference and uncertainty with their dynamic responsiveness, nature-inspired algorithms provide effective means for solving multi-objective optimization problems, and multi-sensor fusion collectively forms the perceptual foundation upon which these algorithms can operate reliably.
Navigation and path planning algorithms are the core of agricultural robot autonomy. Although existing studies have proposed various effective solutions for specific scenarios, their generalizability and cost-effectiveness remain significant hurdles. Most algorithms depend on high-precision sensors and substantial computational power, resulting in high system costs that hinder widespread adoption. In addition, the long-term adaptability and intelligence level of these algorithms require further improvement, since systems lack the capability for online learning and autonomous evolution in response to continuous environmental changes caused by crop growth, while their understanding and handling of sudden abnormal situations also fall short of human-level adaptability. Combining low-cost commonsense reasoning with high-cost precise perception could be a promising direction for overcoming this challenge in the future.
Future research trends will increasingly focus on AI-driven adaptive learning, such as utilizing deep RL to online-optimize a robot’s decision-making policy in dynamic environments. Meanwhile, advancing algorithms from controlled laboratory settings to large-scale, real-world, complex field applications and conducting thorough empirical validation will be crucial for achieving the comprehensive deployment and industrialization of agricultural robots.
6. Challenges and Future Outlook
With the deep integration of technologies such as DL, UAV, and agricultural robotics into the agricultural sector, smart agriculture has progressed from single-technology applications to synergistic PDE development. However, it is difficult to construct a real-world closed-loop autonomous system. It acquires real-time field information through multi-source perception, generates optimal management strategies via intelligent decision-making, executes precise operations through autonomous action, and continuously optimizes models via execution feedback. These include challenges in technological integration, data governance, algorithmic adaptation, hardware deployment, and standardization. Concurrently, to meet the demands of future agricultural sustainability and the diverse needs of farmers worldwide, smart agriculture technologies must continue to explore advancements in frontier applications, empowering green production, and user-friendly design to achieve a synergistic enhancement of global agricultural productivity and ecological benefits.
6.1. Core Challenges
6.1.1. System Fragmentation: Obstacles to Synergistic Integration of Perception, Decision, and Execution
The primary challenge in building a closed-loop autonomous agricultural brain system lies in the fragmentation and weak synergy among technological modules. Currently, components of the global smart agriculture ecosystem, including the perception layer, decision layer and execution layer, are developed independently by different entities, lacking a unified framework for collaborative control. For instance, pest/disease data acquired by UAV via multi-spectral monitoring often be manually exported, imported into a decision model to generate a spraying prescription, and then manually input into an agricultural robot’s control system. This process introduces delays and fails to meet real-time response requirements. This phenomenon of data silos and process disconnection prevents the formation of a dynamic feedback loop within agricultural brain. Thereby, metrics of execution effectiveness, such as pesticide spray uniformity or harvest damage rates, cannot be fed back in real-time to the decision layer. Consequently, decision models cannot iterate and optimize based on actual outcomes, limiting the overall intelligence of the system.
Substantial progress has been made in perception, decision-making, and execution technologies individually. However, the interfaces between these modules become the performance bottleneck for the overall system. This bucket effect means that technological advancements in any single module do not translate linearly into efficiency gains for the entire agricultural system. From a global technology adoption perspective, integration solutions vary significantly across regions and companies. Some smart farms in Europe adopt localized integration schemes using UAV, edge computing and robot, while North American farms rely more on centralized cloud-based decision making. The data interfaces and communication protocols of these differing approaches are often incompatible, further hindering cross-regional technology transfer and complicating global technological synergy. Even International Organization for Standardization (ISO) has issued foundational standards such as ISO 18497 “Safety requirements for agricultural robots” and ISO 21385 “Unmanned aircraft systems (UAS) for agriculture”, specific standards for data interfaces, model output formats, and device communication protocols remain largely absent. As noted by the United Nations FAO in its 2024 Global Report on Smart Agriculture, “the lack of unified agricultural data standards and insufficient device interoperability remain key bottlenecks constraining the large-scale development of global smart agriculture”[70]. This prevents the efficient formation of a dynamic “Perception-Decision-Execution” feedback loop, where execution outcomes cannot flow back in real-time to optimize decision models, thereby limiting the overall intelligence of the system.
6.1.2. Data and Algorithmic Bottlenecks: Triple Challenge of Quality, Privacy, and Generalizability
The scarcity of high-quality annotated data is a key universal problem constraining the performance of decision-making models in global smart agriculture. This issue directly limits the performance of DL models and the reliability of decision-making models. The contradiction between small data size and large models is a distinctive feature of agricultural AI compared to other fields.
Annotating agricultural data is highly dependent on domain expertise. Furthermore, complex and variable field environments, with factors like changing light, crop occlusion, and growth stage differences, result in high annotation costs and lengthy cycles. Annotating ten of thousands of crop pest/disease images often requires collaboration between agricultural experts and algorithm engineers over several months, with costs potentially reaching hundreds of thousands of US dollars, far exceeding the affordability of smallholder farms in developing countries. Most globally available public agricultural datasets (e.g., PlantVillage, Agricultural-Vision) are collected in controlled laboratory settings, which differ significantly from real field conditions. This leads to a sharp decline in model generalization during practical application. For example, a pest/disease identification model achieving 95% accuracy in a lab might drop to around 70% in tropical African field conditions, and even below 65% in Southeast Asian monsoon season scenarios [71].
Meanwhile, data privacy and security concerns are prominent globally. Agricultural data contains sensitive information, such as field location, soil fertility, and crop yield. Leakage of such data could lead to economic losses for farmers. Although regulations like the EU General Data Protection Regulation and the US Agricultural Data Privacy Act establish norms for data collection and use, implementation gaps persist. Some companies, to reduce costs, may not employ encryption during transmission, risking data interception between UAVs and the cloud. Moreover, data security awareness among farmers in rural areas of developing countries is often weak, with limited understanding of data authorization scope and usage purposes. This exacerbates data security risks and hinders the global sharing and collaborative utilization of agricultural data.
At the algorithmic level, smart agriculture applications must simultaneously meet three demanding criteria of scientific credibility, environmental adaptation, and edge deployment. Current global technological capabilities have not fully achieved this balance. Firstly, for explainability, DL models are often black-box models, making it difficult for farmers to understand the rationale behind decisions. This contributes to a generally low level of trust in such models among farmers worldwide. Secondly, for robustness, extreme weather and complex environments easily lead to algorithmic failure. It is a challenge observed across different global climate zones. Heavy rain in tropical regions increases noise in UAV multi-spectral imagery, significantly reducing pest/disease identification accuracy. In high-latitude regions, strong back lighting can cause visual navigation algorithms for agricultural robots to misjudge crop row boundaries. Dust storms in arid regions interfere with sensor data collection, amplifying errors in soil moisture measurement. Even if augmentation of simulating rain, backlight, and dust data is used to improve model adaptability, the diversity of real field conditions far exceeds simulated scenarios. Algorithmic robustness requires further breakthroughs. This gap is not merely between the lab and the field, but between idealized physical models and the complex, nonlinear responses of biological agricultural systems (crops, pests). Thirdly, as for light-weighting, complex models are difficult to adapt to the low-cost edge devices prevalent globally. For instance, a Transformer-based crop yield prediction model with tens of millions of parameters requires high-performance cloud servers. However, computing power of commonly used smartphones or simple edge gateways among farmers in developing countries is limited. Inference delays of 5-10 seconds cannot meet the requirements of scenarios like UAV precision spraying (requiring latency <500 ms) or real-time irrigation decisions. This limitation hinders the promotion of smart agriculture technologies in developing countries to some extent.
6.1.3. Hardware Reliability Dilemma: High Costs and Low Durability Constraining Large-Scale Deployment
Hardware, such as agricultural robots and high-precision sensors, faces dual dilemma of excessive cost and insufficient reliability. The price of an intelligent agricultural machinery system can reach hundreds of thousands of US dollars, putting it out of reach for most smallholder farms and resulting in excessively long investment return periods. Even relatively low-cost plant protection drones incur significant annual maintenance costs, further raising the barrier to adoption. These issues directly contribute to the low penetration rate of smart agriculture hardware worldwide, exacerbating the technology gap between developing countries and large-scale farms.
From a reliability perspective, agricultural hardware must withstand diverse, harsh field environments globally, including high temperature and humidity, extreme cold, dust, and salinity. However, many current devices are designed based on industrial standards, with insufficient consideration for performance requirements specific to agricultural scenarios, such as long-term durability, dust/waterproofing, and corrosion resistance. This leads to high failure rates, impacting continuous operation efficiency and eroding farmer trust and willingness to adopt these technologies. Therefore, developing agricultural-specific hardware that is economical, weather-resistant, and highly reliable is the material foundation for large-scale technology deployment and a critical challenge the industry chain must overcome.
6.2. Future Landscape of Human-Centered and Inclusive Agriculture
The future trajectory of agricultural intelligence is no longer defined by the adoption of isolated technologies, but by their purposeful convergence to build intelligent, sustainable and equitable systems. This transformation highly depends on translating technological potential into tangible value by empowering the agricultural brain with frontier innovations, advancing technologies from precision toward sustainability, and promoting global adoption through human-centered system design.
6.2.1. Empowering the Agricultural Brain with Frontier Innovations
The next phase of agricultural brain will be characterized by a symbiotic relationship between novel data paradigms, advanced cognitive models, and adaptive physical agents. The challenge shifts from data processing to contextual understanding. This will require sophisticated frameworks for multi-modal data fusion that can seamlessly integrate disparate streams, such as from hyper-spectral satellites and distributed networks to ground-based robotics into a coherent spatio-temporal knowledge graph. Concurrently, privacy-preserving computation techniques, such as federated learning, will become crucial for building robust, generalizable models without compromising data sovereignty, pooling insights from fragmented smallholdings to bridge the data scarcity gap.
Decision-making may be evolving from reactive analytics to proactive simulation and strategy generation. The integration of generative AI and high-fidelity digital twins will create virtual proving grounds for agricultural management. These systems will simulate crop responses under myriad scenarios, allowing for pre-emptive evaluation and optimization of intervention strategies, thereby de-risking field operations and enhancing resilience.
On the execution front, the principle of embodied intelligence becomes mature. Agricultural robots will transition from pre-programmed tools to autonomous agents capable of real-time environmental interpretation, online learning, and adaptive task execution. This will enable a single robotic platform to perform diverse functions, from delicate harvesting to targeted weeding, dynamically adapting its behavior to the specific micro-conditions of the field.
In combination, this technological arc will ultimately points toward holistic system integration and scalable democratization. The convergence of lightweight algorithms, affordable sensing, and edge-cloud orchestration will lower entry barriers. The focus will expand from optimizing discrete production stages to orchestrating entire value chains, integrating agronomic models with logistics and market intelligence to enable closed-loop planning from seed to sale. This integrated approach is the key to unlocking a new paradigm of sustainable intensification, aligning productivity gains with critical environmental stewardship goals.
6.2.2. Advancing Technologies from Precision Toward Sustainability
The imperative for agriculture extends beyond efficiency to encompass verifiable ecological stewardship. Here, smart technologies transition from tools of optimization to instruments of sustainability, enabling a measurable transition towards regenerative practices.
Precision will be redefined through the lens of environmental footprint. Variable-rate application will evolve into multi-objective resource optimization, where input prescriptions are derived not only from crop needs but also from models predicting soil health impact, nutrient runoff potential, and non-target ecological effects. For instance, pesticide application maps will be informed by computer vision identifying pest hot spots fused with GIS data on proximity to waterways or pollinator habitats, ensuring protection is both effective and contained.
A profound application lies in leveraging AI for biodiversity conservation and ecosystem service enhancement. Beyond merely minimizing harm, systems can be designed for active ecological co-management. ML models trained on acoustic and visual data can monitor indicator species, quantifying farm-level biodiversity. This data can inform management plans that intentionally design ecological infrastructure, such as insectary strips or hedgerows, into production landscapes. Robotics, guided by real-time species identification, can execute precise mechanical weeding while avoiding beneficial arthropods, effectively fostering integrated pest management. This represents a shift from seeing nature as a constraint to partnering with it as a productive asset, aligning agricultural output with planetary health objectives.
6.2.3. Promoting Global Adoption Through Human-Centered System Design
The ultimate measure of success for agricultural intelligence is not its sophistication in the lab, but its adoption and efficacy in the hands of diverse farmers worldwide. This demands a deliberate focus on accessibility, trust, and inclusive value creation.
Overcoming the trust deficit requires moving from black-box solutions to interactive, explainable partners. Interfaces must translate complex algorithmic outputs into intuitive, actionable insights, such as replacing confidence intervals with simple risk indicators and converting spectral indices into visual maps of plant vigor or stress. Participatory design, which involves end-users in the development process, is proven to yield systems that align with local knowledge, workflows, and socio-economic realities, thereby fostering ownership and trust[72,73].
Inclusive design must address the digital divide through adaptive interaction modes. This includes robust voice-based interfaces in local dialects, icon-driven workflows for low-literacy users, and offline functionality for areas with poor connectivity. The economic model is critical. Innovation in service design, such as drone-as-a-service or community-based data cooperatives, can decouple benefits from ownership, making advanced technologies accessible to smallholders. Besides, systemic change requires concerted capacity building and supportive policy. Training programs must empower farmers with digital literacy, while subsidies and extension services should be strategically deployed for the adoption of sustainable, precision-based practices, ensuring the digital agricultural revolution benefit is universally shared [74,75,76].
7. Conclusions
This technical review has examined the integration and application of AI technologies within the PDE framework of agricultural intelligence. The empowering role of AI extends far beyond simply replacing individual tools. It is fundamentally restructuring the knowledge system and operational workflows of agricultural production. At the Perception level, AI enables fine-grained interpretation of crop physiology and ecology, surpassing the limits of human senses. At the Decision-making level, it catalyzes a fundamental shift from experience-dependent practices to data- and model-driven approaches, facilitating globally optimized intelligent decisions. At the Execution level, it pioneers a transition from human-controlled operations to machine autonomy, providing a reliable physical platform for precision agriculture.
The core theoretical and practical value of this review lies in establishing the PDE framework as a unified systematic analytical workflow. This framework clarifies the logic and interconnections of technological development in agricultural intelligence and provides a top-level design and a solid theoretical foundation for industry, particularly for ongoing agricultural intelligent equipment development. However, autonomous agricultural systems remains challenging, with several directions being particularly crucial. Firstly, progress towards embodied intelligent systems. Future research must promote the deep coupling of AI models with agricultural robots, developing embodied agents capable of active environmental interaction and online lifelong learning. This will enable them to truly understand and adapt to complex biological environments, advancing from mere automation executing predefined tasks to autonomy handling unknown scenarios. Secondly, exploration of agricultural large-scale models. The development of agricultural foundation models that deeply integrate domain expertise and possess capabilities for cross-task generalization and causal reasoning will be key to lowering the application barrier of AI technology and achieving widespread accessibility. Such systems would not just “see” data but “understand” agronomic principles. Thirdly, adherence to a human-centered path for inclusive adoption. The ultimate value of agricultural intelligence technology lies in its successful implementation. It is imperative to ensure that technological outcomes can be understood, trusted, and used by agricultural operators worldwide, regardless of scale or technical background, through explainable AI, lightweight design, and inclusive human-computer interaction, ultimately building an efficient, green, and inclusive future for smart agriculture.
Despite the persistent challenges, deep integration of AI technologies and agriculture is an irreversible trend. It serves not merely as a tool for enhancing production efficiency but as a core engine and strategic pillar for addressing global challenges related to food security, resource constraints, and sustainable development. Its continued evolution promises to inject new vitality and boundless possibilities into this age-old industry.
Author Contributions
Author Contributions: Conceptualization, Q.S. and Q.L.; Data curation, S.Y. and X.L.; Formal analysis, S.Y., X.L. and S.Z.; Funding acquisition, Q.S.; Investigation, S.Y., Q.S., and Q.L.; Methodology, S.Y. and X.L.; Project administration, Q.S. and Q.L.; Software, X.L. and S.Z.; Supervision, S.Y., Q.L.; Validation, S.Z.; Visualization, X.L. and S.Z.; Writing - original draft, X.L.; Writing - review and editing, S.Y., Q.S., and Q.L. All authors have read and agreed to the published version of the manuscript.
Funding
The work was supported by the National Key Research and Develop Program of China (Grant No. 2022ZD0115901 and 2022YFC2409000), the National Natural Science Foundation of China (Grant No. 62177007, and U20A20373), the China-Central Eastern European Countries High Education Joint Education Project (Grant No. 202012), and the Public Computing Cloud, CUC. The funder had no role in the study design, data collection and analysis, decision to publish, or preparation of the manuscript.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviation
The following abbreviations are used in this manuscript:
| AI | Artificial Intelligence |
| PDE | Perception-Decision-Execution |
| UAV | Unmanned Aerial Vehicle |
| RS | Remote Sensing |
| SLAM | Simultaneous Localization and Mapping |
| RL | Reinforcement Learning |
| DL | Deep Learning |
| ML | Machine Learning |
| CNN | Convolutional Neural Network |
| YOLO | You Only Look Once |
| RF | Random Forest |
| FAO | Food and Agriculture Organization |
| WMO | World Meteorological Organization |
| LSTM | Long Short-Term Memory |
| GNN | Graph Neural Network |
| UGV | Unmanned Ground Vehicle |
| NIR | Near-Infrared light |
| LiDAR | Light Detection and Ranging |
| RGB-D | RGB plus Depth |
| SVR | Support Vector Regression |
| PSO | Particle Swarm Optimization |
| GA | Genetic Algorithm |
| AHP | Analytic Hierarchy Process |
| LLM | Large Language Model |
| GRU | Gated Recurrent Unit |
| NDVI | Normalized Difference Vegetation Index |
| NPK | Nitrogen, Phosphorus, and Potassium |
| RTK-GPS | Real-Time Kinematic Global Positioning System |
| IMU | Inertial Measurement Unit |
| SAR | Synthetic Aperture Radar |
| XGBoost | Extreme Gradient Boosting |
| FCN | Fully Convolutional Network |
| GAN | Generative Adversarial Network |
| mAP | mean Average Precision |
| ISO | International Organization for Standardization |
References
- Ahmad, I.; Yang, Y.; Yue, Y.; et al. Deep Learning Based Detector YOLOv5 for Identifying Insect Pests. Applied Sciences 2022, 12(19), 10167. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Sagan, V.; Sidike, P.; et al. Soybean yield prediction from UAV using multi-modal data fusion and deep learning. Remote Sens. Environ. 2020, 237, 111599. [Google Scholar] [CrossRef]
- Hughes, D.; Salathé, M. An open access repository of images on plant health to enable the development of mobile disease diagnostics. arXiv 2015, arXiv:1511.08060. [Google Scholar]
- Wang, D.; Zhang, D.; Yang, G.; et al. CropDeep: A multi-class dataset for crop pest and disease detection in the wild. Computers and Electronics in Agriculture 2022, 201, 107306. [Google Scholar]
- Chiu, M. T.; Li, X.; Xu, Y.; et al. Agricultural-Vision: A large aerial image database for agricultural pattern analysis. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, 2021; pp. 868–877. [Google Scholar]
- Smith, J.; Johnson, L.; Brown, K. SoybeanNet: A Large-Scale RGB-D Dataset for Crop and Weed Segmentation in Precision Agriculture. IEEE Robotics and Automation Letters 2024, 9(3), 12345–12352. [Google Scholar]
- Li, Y.; Wang, H.; Chen, Z.; et al. FruitVerse: A Large-Scale Dataset for Fine-Grained Fruit Perception in Orchard Environments. International Journal of Computer Vision 2024, 132(5), 789–805. [Google Scholar]
- Jones, M.; Williams, R. WeedMap-3D: A Multi-Modal Dataset for Weed Detection and Localization in Agricultural Fields. Computers and Electronics in Agriculture 2024, 220, 108876. [Google Scholar]
- Momin, S.; Yamamoto, K.; Miyamoto, K.; et al. AgriSegNet: A Deep Learning-based Framework for Semantic Segmentation of Crop and Weed. Computers and Electronics in Agriculture 2023, 204, 107509. [Google Scholar]
- Wu, J.; Birch, C.; Wang, Y.; et al. OpenWeedLocator (OWL): An open-source, low-cost device for fallow weed detection. HardwareX 2024, 17, e00507. [Google Scholar]
- Tseng, G.; Zvonkov, I.; Rolf, E.; et al. CropHarvest: A global dataset for crop type classification and yield forecasting. Nature Scientific Data 2022, 9(1), 357. [Google Scholar]
- Long, J; Shelhamer, E; Darrell, T. Fully convolutional networks for semantic segmentation. IEEE Trans Pattern Anal Mach Intell. 2015, 39(4), 640–51. [Google Scholar]
- Too, EC; Yujian, L; Njuki, S; Yingchun, L. A comparative study of fne-tuning deep learning models for plant disease identifcation. Comput Electron Agric. 2018, 161, 272–9. [Google Scholar] [CrossRef]
- Picon, A; Seitz, M; Alvarez-Gila, A; Mohnke, P; Echazarra, J. Crop conditional convolutional neural networks for massive multi-crop plant disease classifcation over cell phone acquired images taken on real feld conditions. Comput Electron Agric. 2019, 167, 105093. [Google Scholar] [CrossRef]
- Kerkech, M; Hafane, A; Canals, R. Vine disease detection in UAV multi-spectralimages using optimized image registration and deep learning segmentation approach. Comput Electron Agric. 2020, 174, 105446. [Google Scholar] [CrossRef]
- Nazki, H.; Yoon, S.; Fuentes, A.; Park, D. S. Unsupervised image translation using adversarial networks for improved plant disease recognition. Comput. Electron. Agric. 2020, 168, 105117. [Google Scholar] [CrossRef]
- Shoaib, M.; Sadeghi-Niaraki, A.; Ali, F.; et al. Leveraging deep learning for plant disease and pest detection: a comprehensive review and future directions. Frontiers in Plant Science 2025, 16, 1538163. [Google Scholar] [CrossRef]
- Liu, W.; Cao, X.; Fan, J.; et al. Detecting wheat powdery mildew and predicting grain yield using unmanned aerial photography. Plant Disease 2018, 102(9), 1981–1988. [Google Scholar] [CrossRef] [PubMed]
- Lan, Y.; Huang, Z.; Deng, X.; et al. Comparison of machine learning methods for citrus greening detection on UAV multi-spectral images. Computers and Electronics in Agriculture 2020, 171, 105234. [Google Scholar] [CrossRef]
- Abdulridha, J.; Ampatzidis, Y.; Roberts, P. Detecting powdery mildew disease in squash at different stages using UAV-based hyper-spectral imaging and artificial intelligence. Biosyst. Eng. 2020, 197, 135–148. [Google Scholar] [CrossRef]
- Nahiyoon, S. A.; Cui, L.; Yang, D.; et al. Biocidal radiuses of cycloxaprid, imidacloprid and lambda-cyhalothrin droplets controlling against cotton aphid (Aphis gossypii) using an unmanned aerial vehicle. Pest Management Science 2020, 76(11), 3029–3036. [Google Scholar] [CrossRef]
- Bhujel, A.; Khan, F.; Basak, J. K.; et al. Detection of gray mold disease and its severity on strawberry using deep learning networks. Journal of Plant Diseases and Protection 2022, 129(6), 579–592. [Google Scholar] [CrossRef]
- Huang, Y; Liu, Z; Zhao, H; et al. YOLO-YSTs: An improved YOLOv10n-based method for real-time field pest detection[J]. Agronomy 2025, 15(3), 575. [Google Scholar] [CrossRef]
- Sharma, H; Sidhu, H; Bhowmik, A. Remote Sensing Using Unmanned Aerial Vehicles for Water Stress Detection: A Review Focusing on Specialty Crops[J]. Drones 2025, 9(4), 241. [Google Scholar] [CrossRef]
- Yang, G.; Li, C.; Yu, H.; et al. UAV based multi-load remote sensing technologies for wheat breeding information acquirement. Transactions of the Chinese Society of Agricultural Engineering 2015, 31(10), 184–190. [Google Scholar]
- Yinka-Banjo, C.; Ajayi, O. Sky-farmers: Applications of unmanned aerial vehicles (UAV) in agriculture. In Autonomous vehicles; Elsevier, 2019; pp. 107–128. [Google Scholar]
- Marin, D. B.; Santana, L. S.; Barbosa, B. D. S.; et al. Detecting coffee leaf rust with UAV-based vegetation indices and decision tree machine learning models. Computers and Electronics in Agriculture 2021, 190, 106476. [Google Scholar] [CrossRef]
- Lin, Y. C.; Habib, A. Quality control and crop characterization framework for multi-temporal UAV LiDAR data over mechanized agricultural fields. Remote Sensing of Environment 2021, 256, 112299. [Google Scholar] [CrossRef]
- Feng, Z.; Song, L.; Zhang, S.; et al. Wheat Powdery Mildew monitoring based on information fusion of multi-spectral and thermal infrared images acquired with an unmanned aerial vehicle. Scientia Agricultura Sinica 2022, 55(5), 890–906. [Google Scholar]
- Bouguettaya, A.; Zarzour, H.; Kechida, A.; et al. Deep learning techniques to classify agricultural crops through UAV imagery: a review. Neural Computing and Applications 2022, 34(12), 9511–9536. [Google Scholar] [CrossRef]
- Liu, Y; Feng, H; Fan, Y; et al. Utilizing UAV-based hyper-spectral remote sensing combined with various agronomic traits to monitor potato growth and estimate yield[J]. Computers and Electronics in Agriculture 2025. [Google Scholar]
- Wang, Y; An, J; Shao, M; et al. A comprehensive review of proximal spectral sensing devices and diagnostic equipment for field crop growth monitoring[J]. Precision Agriculture 2025. [Google Scholar] [CrossRef]
- Gago, J.; Douthe, C.; Coopman, R. E.; et al. UAVs challenge to assess water stress for sustainable agriculture. Agricultural Water Management 2015, 153, 9–19. [Google Scholar] [CrossRef]
- Golhani, A.; Srivastava, A.; Escobar, D. E. A review of hyper-spectral imaging applications for the detection of biotic and abiotic stresses in plants. Remote Sensing 2018, 10(6), 828. [Google Scholar]
- Feng, S.; Cao, Y.; Xu, T.; et al. Rice leaf blast classification method based on fused features and one-dimensional deep convolutional neural network. Remote Sensing 2021, 13(16), 3207. [Google Scholar] [CrossRef]
- Hu, P.; Zhang, R.; Yang, J.; et al. Development Status and Key Technologies of Plant Protection UAVs in China: A Review. Drones 2022, 6(12), 354. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, Q.; Xiang, S.; et al. Monitoring the severity of Pantana phyllostachysae Chao infestation in Moso bamboo forests based on UAV multi-spectral remote sensing feature selection. Forests 2022, 13(3), 418. [Google Scholar] [CrossRef]
- Okyere, F G; Cudjoe, D K; Virlet, N; et al. hyper-spectral imaging for phenotyping plant drought stress and nitrogen interactions using multivariate modeling and machine learning techniques in wheat[J]. Remote Sensing 2024, 16(18), 3446. [Google Scholar] [CrossRef]
- Food and Agriculture Organization of the United Nations; World Meteorological Organization. FAO and WMO report highlights extreme heat risks for agriculture[R]. 2025.
- Shaikh, T. A.; Mir, W. A.; Rasool, T.; et al. Machine Learning for Smart Agriculture and Precision Farming: Towards Making the Fields Talk. Archives of Computational Methods in Engineering 2022, 29, 4557–4597. [Google Scholar] [CrossRef]
- Manafifard, M.; Huang, J. A comprehensive review on wheat yield prediction based on remote sensing. Multimedia Tools and Applications 2025, 84(15), 20843–20916. [Google Scholar] [CrossRef]
- Morellos, A.; Pantazi, X.; Moshou, D.; et al. Machine learning-based prediction of soil total nitrogen, organic carbon and moisture content by using VIS-NIR spectroscopy. Biosyst. Eng. 2016, 152, 104–116. [Google Scholar] [CrossRef]
- Padalalu, P.; Mahajan, S.; Dabir, K.; et al. Smart water dripping system for agriculture/farming. 2nd International Conference for Convergence in Technology, 2017; pp. 659–662. [Google Scholar]
- Saki, M; Keshavarz, R; Franklin, D; et al. A Data-Driven Review of Remote Sensing-Based Data Fusion in Precision Agriculture from Foundational to Transformer-Based Techniques[J]. IEEE Transactions on Geoscience and Remote Sensing, 2025. [Google Scholar]
- Agricultural Research Service. Integrating reinforcement learning and large language models for crop production process management optimization and control[R]. 2025.
- Haseeb, M; Tahir, Z; Mahmood, S A; et al. Winter wheat yield prediction using linear and nonlinear machine learning algorithms based on climatological and remote sensing data[J]. Information Processing in Agriculture, 2025. [Google Scholar]
- Chu, Z.; Yu, J. An end-to-end model for rice yield prediction using deep learning fusion. Comput. Electron. Agric. 2020, 174, 105471. [Google Scholar] [CrossRef]
- Nevavuori, P.; Narra, N.; Lipping, T. Crop yield prediction with deep convolutional neural networks. Comput. Electron. Agric. 2019, 163, 104859. [Google Scholar] [CrossRef]
- Sagan, V.; Maimaitijiang, M.; Bhadra, S.; et al. Field-scale crop yield prediction using multi-temporal WorldView-3 and PlanetScope satellite data and deep learning. ISPRS J. Photogramm. Remote Sens. 2021, 174, 265–281. [Google Scholar] [CrossRef]
- Adrian, J.; Sagan, V.; Maimaitijiang, M. Sentinel SAR-optical fusion for crop type mapping using deep learning and google earth engine. ISPRS J. Photogramm. Remote Sens. 2021, 175, 215–235. [Google Scholar] [CrossRef]
- Liu, K.; Zhang, C.; Yang, X.; et al. Development of an Occurrence Prediction Model for Cucumber Downy Mildew in Solar Greenhouses Based on Long Short-Term Memory Neural Network. Agronomy 2022, 12, 442. [Google Scholar] [CrossRef]
- Ali, T; Rehman, S U; Ali, S; et al. Smart agriculture: utilizing machine learning and deep learning for drought stress identification in crops[J]. Scientific Reports 2024, 14(1), 74127. [Google Scholar] [CrossRef]
- Van Asselt, J; et al. Climate shocks and climate smart agricultural adoption in Sri Lanka. 2025. [Google Scholar]
- Otazua, N. I. AI-Powered DSS for Resource-Efficient Nutrient, Irrigation, and Microclimate Management in Greenhouses. Chem. Proc. 2022, 10, 63. [Google Scholar]
- Mortazavizadeh, F; Bolonio, D; Mirzaei, M; et al. Advances in machine learning for agricultural water management: a review of techniques and applications[J]. Journal of Hydrology 2025. [Google Scholar] [CrossRef]
- Mesías-Ruiz, G. A.; Pérez-Ortiz, M.; Dorado, J.; et al. Boosting precision crop protection towards Agriculture 5.0 via machine learning and emerging technologies: A contextual review. Front. Plant Sci. 2023, 14, 1143326. [Google Scholar] [CrossRef]
- Deo, A; Sawant, N; Arora, A; et al. How has scientific literature addressed crop planning at farm level: A bibliometric-qualitative review[J]. Farming System 2025. [Google Scholar] [CrossRef]
- Ali, A; Jat Baloch, M Y; Naveed, M; et al. Advanced satellite-based remote sensing and data analytics for precision water resource management and agricultural optimization[J]. Scientific Reports 2025, 15(1), 13167. [Google Scholar] [CrossRef] [PubMed]
- Ji, W.; Huang, X.; Wang, S.; et al. A comprehensive review of the research of the “Eye–Brain–Hand” harvesting system in smart agriculture. Agronomy 2023, 13(9), 2237. [Google Scholar] [CrossRef]
- Wang, L.; Chang, Y.; Chen, W.B. The Artificial Intelligence Driven Autonomous Navigation Operation Path Planning System for Agricultural Machinery. Scalable Computing: Practice and Experience 2025, 26(4), 1879–1885. [Google Scholar] [CrossRef]
- Etezadi, H; Eshkabilov, S. A Comprehensive Overview of Control Algorithms, Sensors, Actuators, and Communication Tools of Autonomous All-Terrain Vehicles in Agriculture [J]. Agriculture 2024, 14(2), 163. [Google Scholar] [CrossRef]
- Bai, Y; Zhang, B; Xu, N; et al. Vision-based navigation and guidance for agricultural autonomous vehicles and robots: A review [J]. Computers and Electronics in Agriculture 2023, 205, 107584. [Google Scholar] [CrossRef]
- Chakraborty, S.; Elangovan, D.; Govindarajan, P.L.; et al. A Comprehensive Review of Path Planning for Agricultural Ground Robots. Sustainability 2022, 14(15), 9156. [Google Scholar] [CrossRef]
- Juman, M.A.; Wong, Y.W.; Rajkumar, R.K.; et al. An Integrated Path Planning System for a Robot Designed for Oil Palm Plantations. In Proceedings of the TENCON 2017–2017 IEEE Region 10 Conference, Penang, Malaysia, 5–8 November 2017; 2017; pp. 1–6. [Google Scholar]
- Yan, X.-T.; Bianco, A.; Niu, C.; et al. The AgriRover: A Reinvented Mechatronic Platform from Space Robotics for Precision Farming. In Reinventing Mechatronics; Springer: Berlin/Heidelberg, 2020; pp. 55–73. [Google Scholar]
- Santos, L.; Santos, F.N.; Mendes, J.; et al. Path Planning Aware of Robot’s Center of Mass for Steep Slope Vineyards. Robotica 2019, 38(4), 684–689. [Google Scholar] [CrossRef]
- Rovira-Más, F.; Zhang, Q.; Reid, J.F. Stereo vision three-dimensional terrain maps for precision agriculture. Computers and Electronics in Agriculture 2008, 60(2), 133–143. [Google Scholar] [CrossRef]
- Talami, M.A.; Istiak, S.M.; Safayet, R.; et al. Path Planning and Controller Development for UGVs. 2025; ASABE Paper No. 2500735. [Google Scholar] [CrossRef]
- Padhiary, M.; Kumar, R.; Sethi, L.N. Navigating the Future of Agriculture: A Comprehensive Review of Automatic All-Terrain Vehicles in Precision Farming. J. Inst. Eng. India Ser. A 2024, 105(3), 767–782. [Google Scholar] [CrossRef]
- FAO. Community-Based AI Platforms for Smallholder Resilience; Food and Agriculture Organization of the United Nations, 2024. [Google Scholar]
- Koella, M.; Hughes, D. PlantVillage: A dataset for plant disease image recognition. arXiv 2015, arXiv:1511.08060. [Google Scholar]
- Kaur, P.; Singh, R.; Kumar, S. Adoption of Explainable AI for Fertilizer Recommendation in Punjab Wheat Fields. Computers and Electronics in Agriculture 2024, 218, 108742. [Google Scholar]
- Mwangi, J.; Otieno, D.; Adera, E. Co-Designing Mobile Apps with Farmers for Pest Detection in Kenya. ICT for Development 2024, 30(1), 45–63. [Google Scholar]
- Rahman, M.; Islam, S.; Hossain, T. Icon-Based UI for Low-Literacy Farmers in Bangladesh. In Proceedings of the IEEE Global Humanitarian Technology Conference, 2024; pp. 156–162. [Google Scholar]
- Silva, R.; Oliveira, L.; Costa, F. Voice-Assisted AI Systems for Elderly Farmers in Brazil. Journal of Agricultural Informatics 2023, 14(3), 112–125. [Google Scholar]
- Nguyen, T.; Le, H.; Pham, V. Drone Sharing Model for Smallholder Rice Farmers in the Mekong Delta. Sustainability 2025, 17(3), 895. [Google Scholar]
- Chen, P.; Ma, H.; Cui, Z.; et al. Field Study of UAV Variable-Rate Spraying Method for Orchards Based on Canopy Volume. Agriculture 2025, 15(13), 1374. [Google Scholar] [CrossRef]
- Cho, S B; Soleh, H M; Choi, J W; et al. Recent methods for evaluating crop water stress using ai techniques: A review[J]. Sensors 2024, 24(19), 6313. [Google Scholar] [CrossRef] [PubMed]
- EU Agri-Digital. Subsidy Schemes for Smart Farming Equipment in Family Farms; European Commission Directorate-General for Agriculture and Rural Development, 2023. [Google Scholar]
- Government of India. Digital Krishi: Annual Report on Farmer Training and AI Adoption. In Ministry of Agriculture and Farmers Welfare; 2024. [Google Scholar]
- Jeon, D.; Jung, H.-J.; Lee, K.-D.; et al. A Study of Spray Volume Prediction Techniques for Variable Rate Pesticide Application using Unmanned Aerial Vehicles. Journal of Biosystems Engineering 2025, 50(1), 21–32. [Google Scholar] [CrossRef]
- Li, Z.; Wang, J.; Chen, Y. Trust and Transparency in AI-Driven Agriculture: A Case Study of Smallholder Farms in China. Agriculture and Human Values 2023, 40(2), 567–582. [Google Scholar]
- Maraveas, C. Incorporating Artificial Intelligence Technology in Smart Greenhouses: Current State of the Art. Applied Sciences 2023, 13(1), 14. [Google Scholar] [CrossRef]
- Navas, J.; Vidwath, S.; Kootstra, G. Soft Robotic Grippers for Fruit Harvesting: Design and Performance Evaluation. Robotics 2023, 12(4), 89. [Google Scholar]
- Qazi, S.; Khawaja, B. A.; Farooq, Q. U. IoT-Equipped and AI-Enabled Next Generation Smart Agriculture: A Critical Review, Current Challenges and Future Trends. IEEE Access 2022, 10, 21219–21235. [Google Scholar] [CrossRef]
Figure 1.
A closed-loop PDE framework for modern agricultural intelligence.
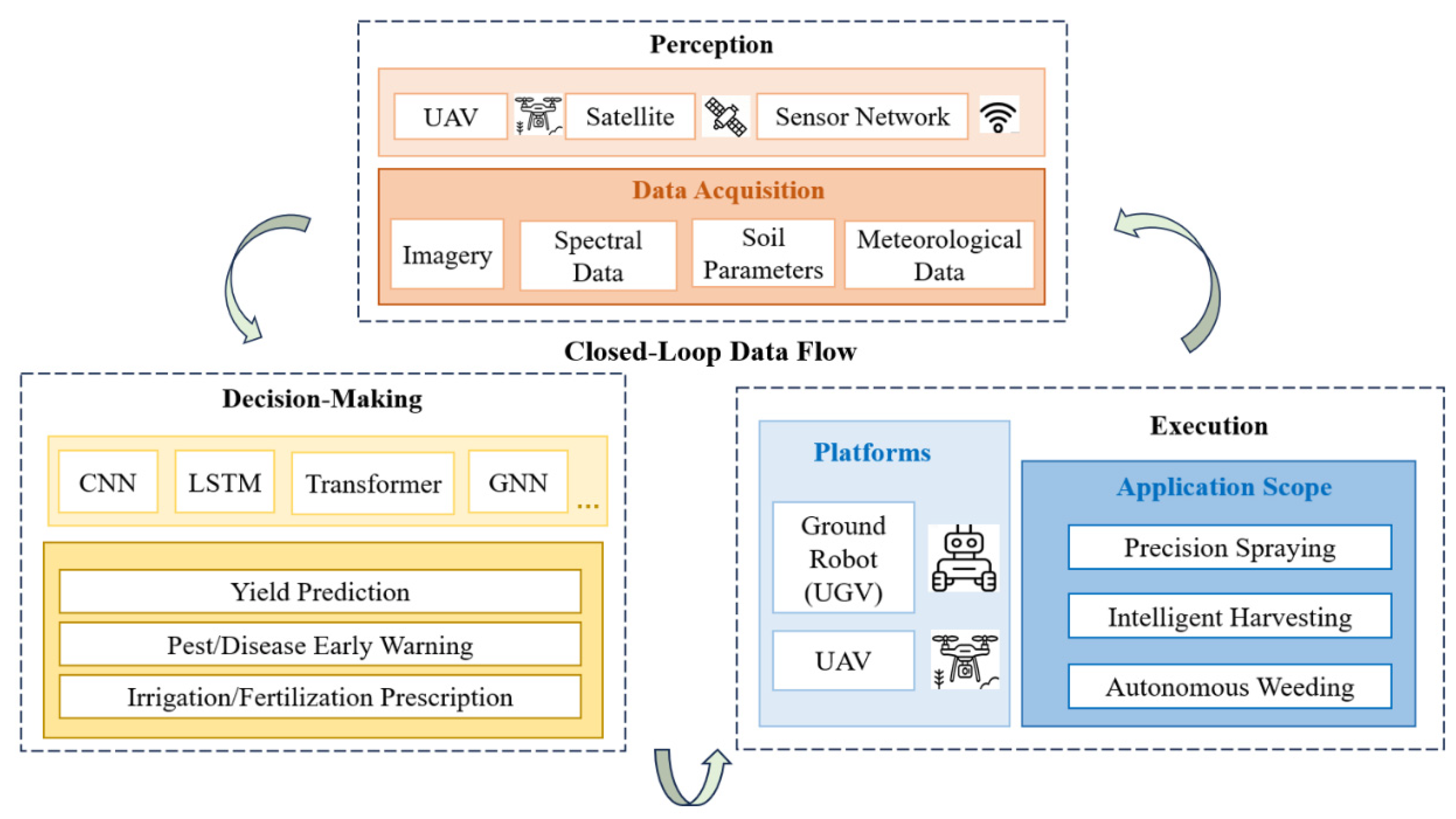
Figure 2.
Proportion of reference papers in this technical review.
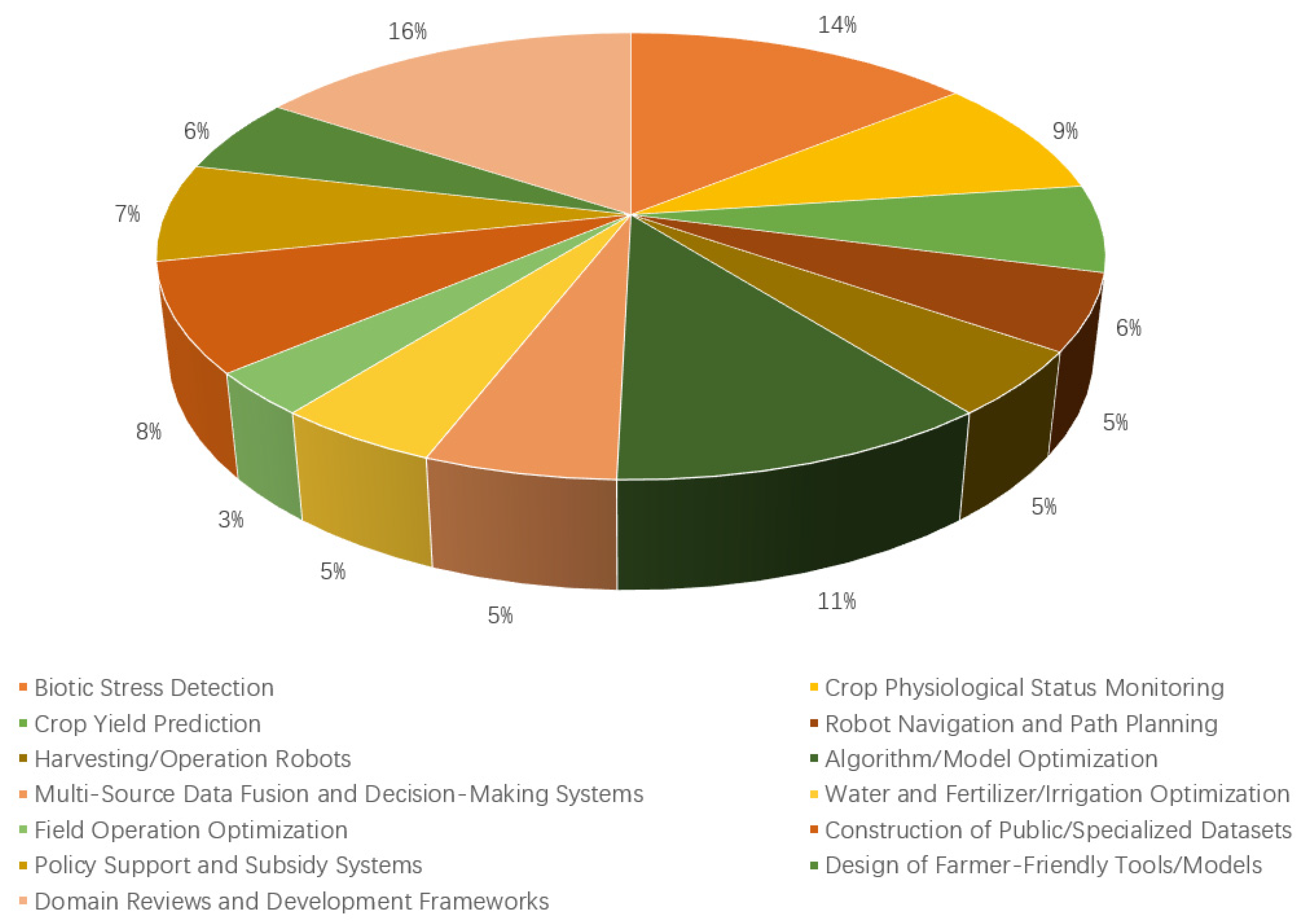
Figure 3.
Timeline of the technological evolution of DL in crop perception.
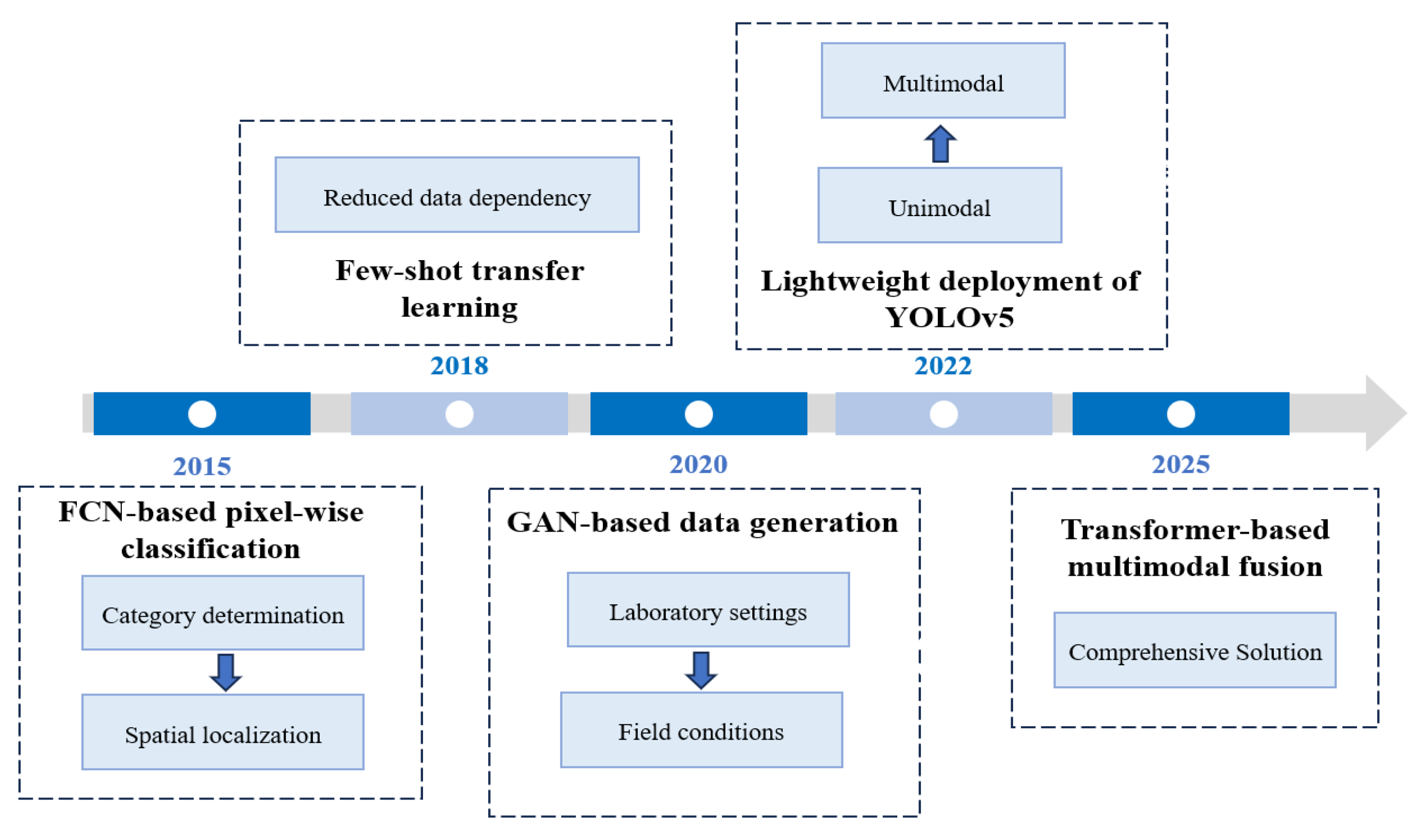
Figure 4.
The Pathway of UAVs in Agricultural Perception.
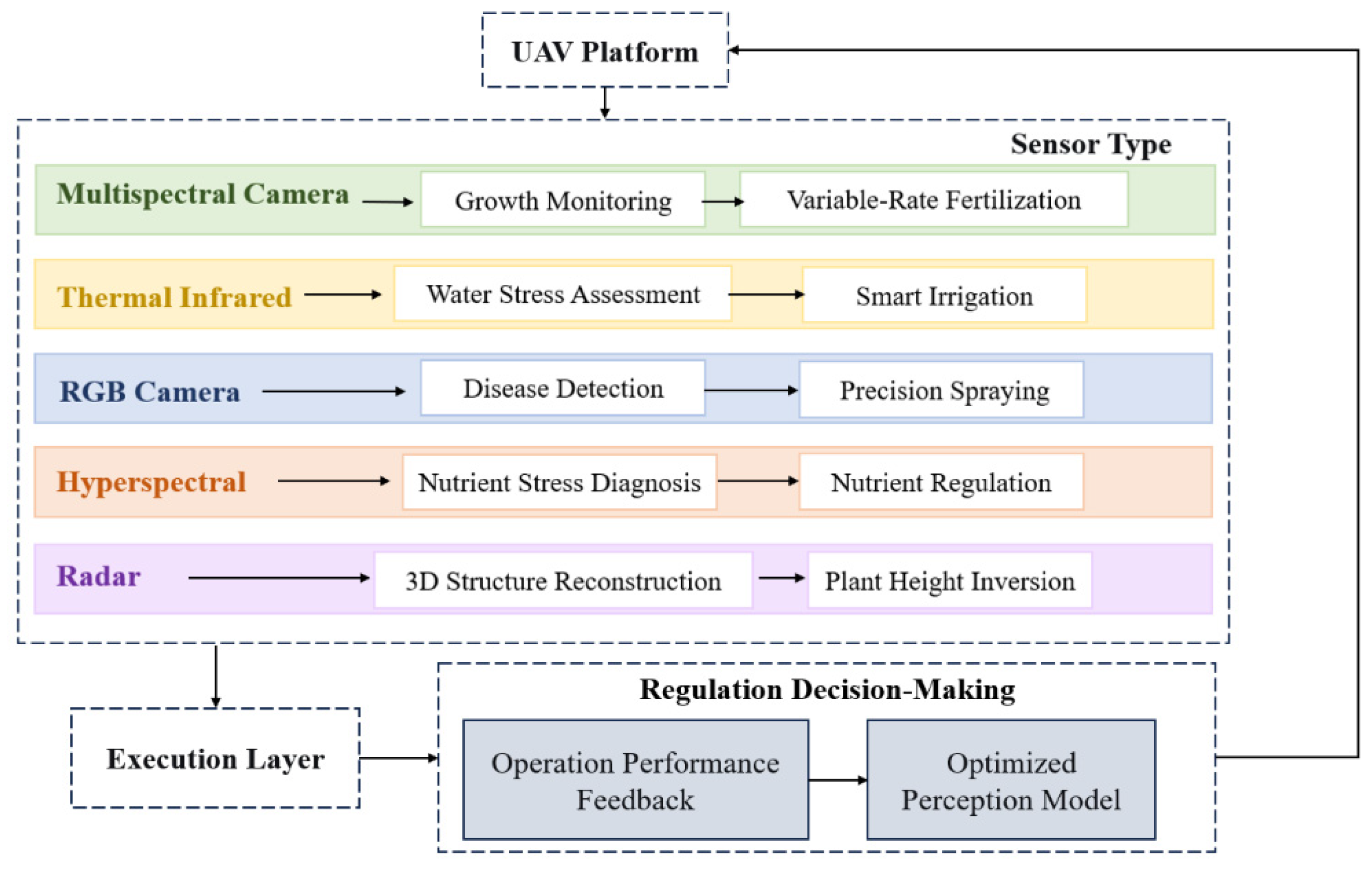
Figure 5.
System Architecture of an Agricultural Robot.
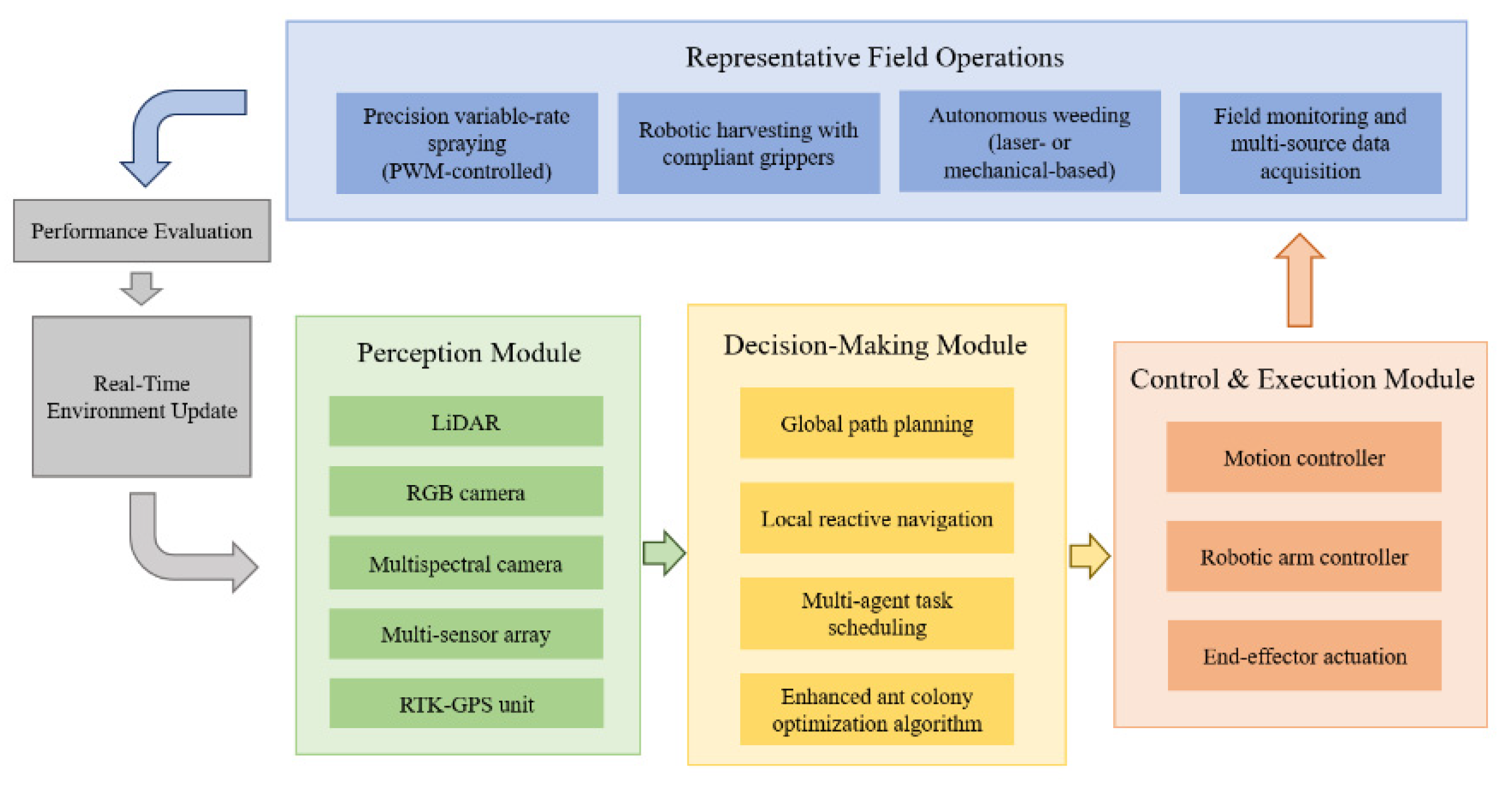
Figure 6.
System Architecture of an Agricultural Robot.
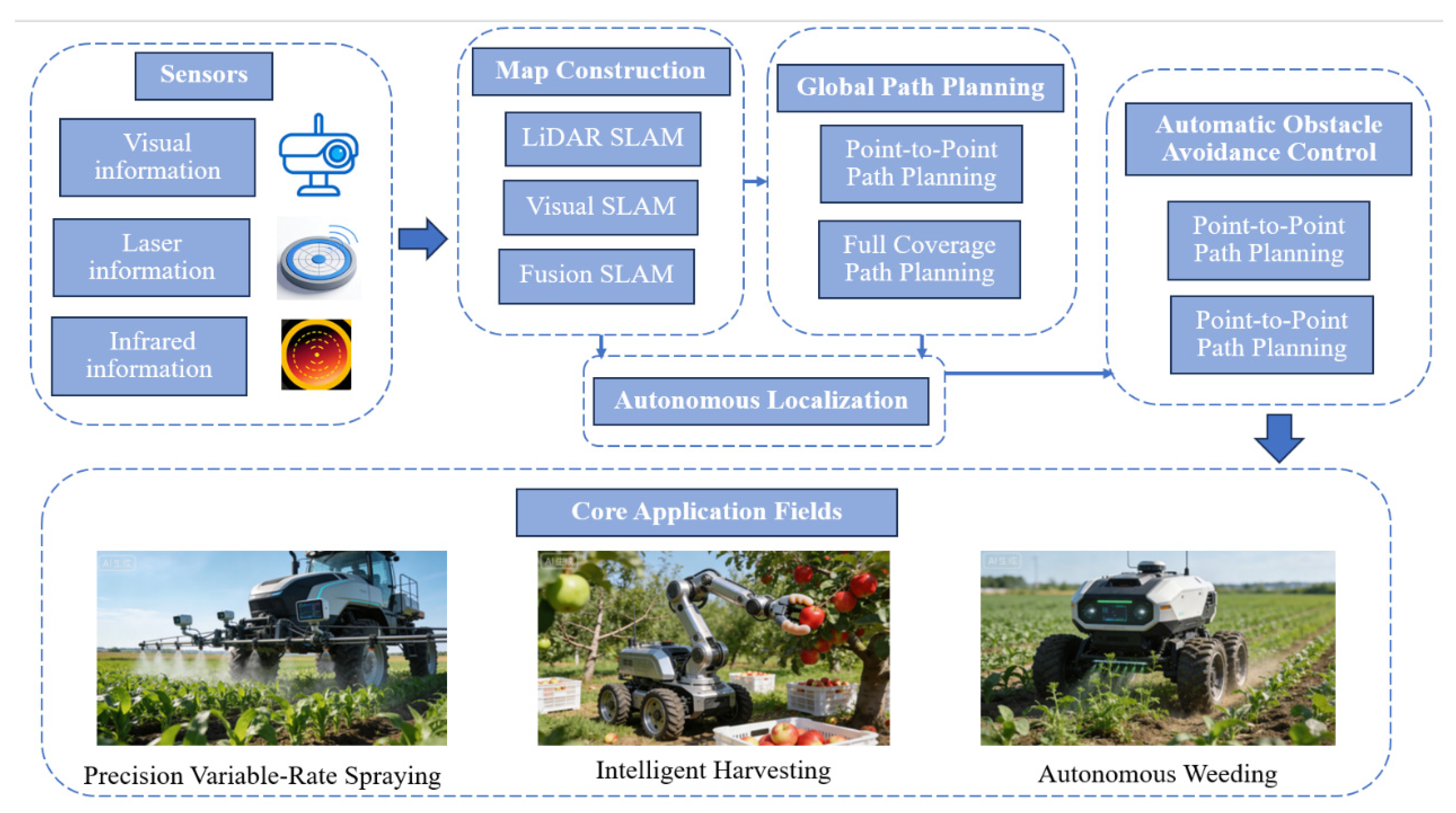

Table 1.
Representative Public Datasets in Agricultural Perception.
| Task | Modality | Description | Main Features | Year | |
|---|---|---|---|---|---|
|
PlantVillage (Hughes & Salathé, 2015)[3] |
disease classification | RGB | 54,309 images, 14 crop species, and 26 diseases. | laboratory setting; clean backgrounds. | 2015 |
|
CropDeep (Wang et al., 2022)[4] |
pest/disease detection and classification | RGB | 11,768 images containing 31 pest/disease categories. | real scenes; complex backgrounds; varying lighting; multi-scale targets. | 2022 |
|
Agricultural-Vision (Chiu et al., 2021)[5] |
semantic segmentation | RGB + NIR | 94,986 image patches, 9 types of field anomaly patterns. | large-scale multi-spectral RS imagery; field-level anomaly region identification. | 2021 |
|
SoybeanNet (Smith et al., 2024)[6] |
crop and weed segmentation | RGB + Depth | 10,000 synchronized RGB-D image pairs. | rich geometric information; crops, weeds, and soil in complex backgrounds; robotic precision operations. | 2024 |
|
FruitVerse (Li et al., 2024) [7] |
orchard fruit detection, segmentation and counting | multi-view RGB | over 500k annotated fruit instances; 12 fruit crop species, covering multiple growth stages. | large-scale, multi-species, multi-growth-stage database | 2024 |
|
WeedMap-3D (Jones & Williams, 2024)[8] |
weed localization | RGB + 3D LiDAR Point Cloud | 2,500 synchronized data groups covering various weed and crop species. | 2D visual appearance with 3D spatial structure information; precise weed localization and classification; advanced perception for autonomous weeding robots. | 2024 |
|
AgriSeg-V2 (Momin et al., 2023)[9] |
semantic segmentation | Hyper-spectral imaging | 5,000 hyper-spectral image cubes; 5 major crop and weed species. | continuous spectral information capturing physiological changes invisible to human eye; early stress diagnosis and fine species discrimination. | 2023 |
|
OpenWeedLocator (Wu et al., 2024)[10] |
weed detection | RGB | 5,778 images and video frames. | an open-source precision weeding project; data from diverse geographical environments and growth stages. | 2024 |
|
CropHarvest (Tseng et al., 2022)[11] |
crop type classification; yield estimation |
multi-temporal satellite imagery (Sentinel-2) | satellite time-series data; over 90,000 plots globally. | temporal analysis with labels from multiple global sources; macro-agricultural monitoring and yield prediction. | 2022 |
RGB, Red, Green, and Blue; NIR, Near-Infrared light; LiDAR, Light Detection and Ranging; RGB-D, RGB plus Depth; 2D, Two-Dimensional.
Table 2.
Multi-source data-based agricultural intelligence.
| Data Type | Decision Types | Models | Applications & Effects |
|---|---|---|---|
| meteorological data |
Predictive decision (dynamic yield prediction); Preventive decision (pest and disease early warning); Regulatory decision (precise water and fertilizer prescription); Planning decision (planting layout optimization) |
LSTM, Transformer, GRU, RF, Prophet |
1. LSTM/Transformer: Correct meteorological forecast errors, capture temporal features and improve yield prediction accuracy 2. GRU/LSTM: Predict the occurrence probability of pests and diseases combined with temperature and humidity data 3. Assist SVR model in calculating crop water demand based on meteorological evapotranspiration 4. Judge suitable crop planting areas via RF combined with historical meteorological data |
| Soil measure | 1. Predictive Decision (Dynamic Yield Prediction) 2. Regulatory Decision (Precise Water and Fertilizer Prescription) 3. Planning Decision (Planting Layout Optimization) |
RF, SVR, PSO, GA, Analytic hierarchy process | 1. Provide basic soil fertility data to assist XGBoost in improving yield prediction accuracy 2. RF Regression/SVR: Establish the relationship between soil nutrients and crop yield, predict fertilizer/water demand; PSO/GA: Optimize water and fertilizer ratio 3. AHP + ML: Quantify soil suitability to support planting planning decisions |
| remote sensing | 1. Predictive Decision (Dynamic Yield Prediction) 2. Preventive Decision (Pest and Disease Early Warning) 3. Regulatory Decision (Precise Water and Fertilizer Prescription) 4. Planning Decision (Planting Layout Optimization) |
CNN, 3D-U-Net, ResNet, XGBoost, GNN, RF | 1. CNN/3D-U-Net/ResNet: Extract spatial features of RS images, fuse SAR and optical data to improve yield prediction robustness; XGBoost: Predict yield combined with RS indices 2. GNN: Characterize the spatial diffusion of pests and diseases; UAV hyper-spectral assists early disease identification 3. Extract crop canopy temperature, NDVI and other growth data to optimize water and fertilizer application rate 4. RF: Identify suitable planting areas combined with satellite RS data; CAMarkov Model: Predict the change trend of agricultural land |
| market data | Planning Decision (Collaborative Optimization of Planting Layout and Market Supply-Demand) | LSTM, Prophet, GNN, RL, LLM, Multi-objective optimization |
1. LSTM/Prophet: Predict agricultural product price trends based on historical price and transaction volume data 2. GNN: Construct a “producer-intermediary-consumer” network to achieve efficient supply-demand matching 3. RL+LLM: Analyze e-commerce demand and policy text data to optimize sales connection processes; Multi-objective Optimization Model: Balance policy compliance, revenue and supply-demand matching |
SVR, Support Vector Regression; PSO, Particle Swarm Optimization; GA, Genetic Algorithm; GNN, Graph Neural Network; LLM, Large Language Model.
Table 3.
Comparative Analysis of Agricultural Robot Platforms.
| Platform Type | Advantages | Limitations | Typical Scenarios | Industrialization Level |
|---|---|---|---|---|
| Wheeled Platform | Simple structure, high speed, high energy efficiency, high control precision | Limited obstacle-crossing ability, poor soft soil adaptability, prone to slipping | Field seeding, plant protection, weeding, plain orchard management | Industrialized |
| Tracked Platform | Low ground pressure, excellent traction, strong obstacle-crossing ability, good terrain adaptability | Complex structure, higher cost, damages surfaces, high steering energy consumption | Mountainous orchards, greenhouses, wet/muddy environments | Near Industrialization |
| Rail-guided Platform | High positioning accuracy, stable operation, low energy consumption, enables continuous operation | Limited mobility range, high installation cost, low flexibility | Greenhouses, fixed work areas, potted crops | Specific Scenario Application |
| Multi-rotor UAV | Vertical Take-off and Landing, hovering capability, high maneuverability, simple structure | Short endurance, limited payload, poor wind resistance | Precision spraying, crop monitoring, small-area surveying | Specific Scenario Application |
| Fixed-wing UAV | Long endurance, high flight speed, strong wind resistance, larger payload | Requires runway/take-off area, cannot hover, complex operation | Large-area RS, farmland surveying, regional census | Specific Scenario Application |
Table 4.
Comparison of Sensor Types.
| Sensor Category | Sensor Type | Technical Parameters | Typical Application Scenarios |
|---|---|---|---|
| Positioning & Attitude | RTK-GPS | Horizontal error <5 cm, update rate 1 Hz | Global positioning and path planning in open, plain fields |
| LiDAR | Working range <200 m, accuracy 0.5-10 mm | Orchard row identification, dynamic obstacle (stones/animals) detection | |
| IMU | Roll/pitch angle error <0.1°, update rate >100 Hz | Real-time vehicle attitude monitoring, short-term positioning during GPS signal loss | |
| Environment & Operational State | RGB Camera | Resolution 1920×1080, crop row segmentation error 3-5 cm | Crop row identification, visual pest/disease detection |
| multi-spectral Camera | NDVI index measurement error <5% | Crop growth vigor assessment, water stress identification | |
| Soil Sensor (Moisture, pH, NPK) | Moisture measurement accuracy ±1%, pH error <0.1 pH | Soil fertility monitoring, variable-rate fertilization or irrigation decision | |
| Ultrasonic Sensor | Detection accuracy 92.20%-92.88%, working range <20 m | Proximity obstacle (ridges/farm machinery) warning |
RTK-GPS, Real-Time Kinematic Global Positioning System; IMU, Inertial Measurement Unit; NPK, Nitrogen, Phosphorus, and Potassium; NDVI, Normalized Difference Vegetation Index;.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



