Submitted:
04 February 2026
Posted:
06 February 2026
You are already at the latest version
Abstract
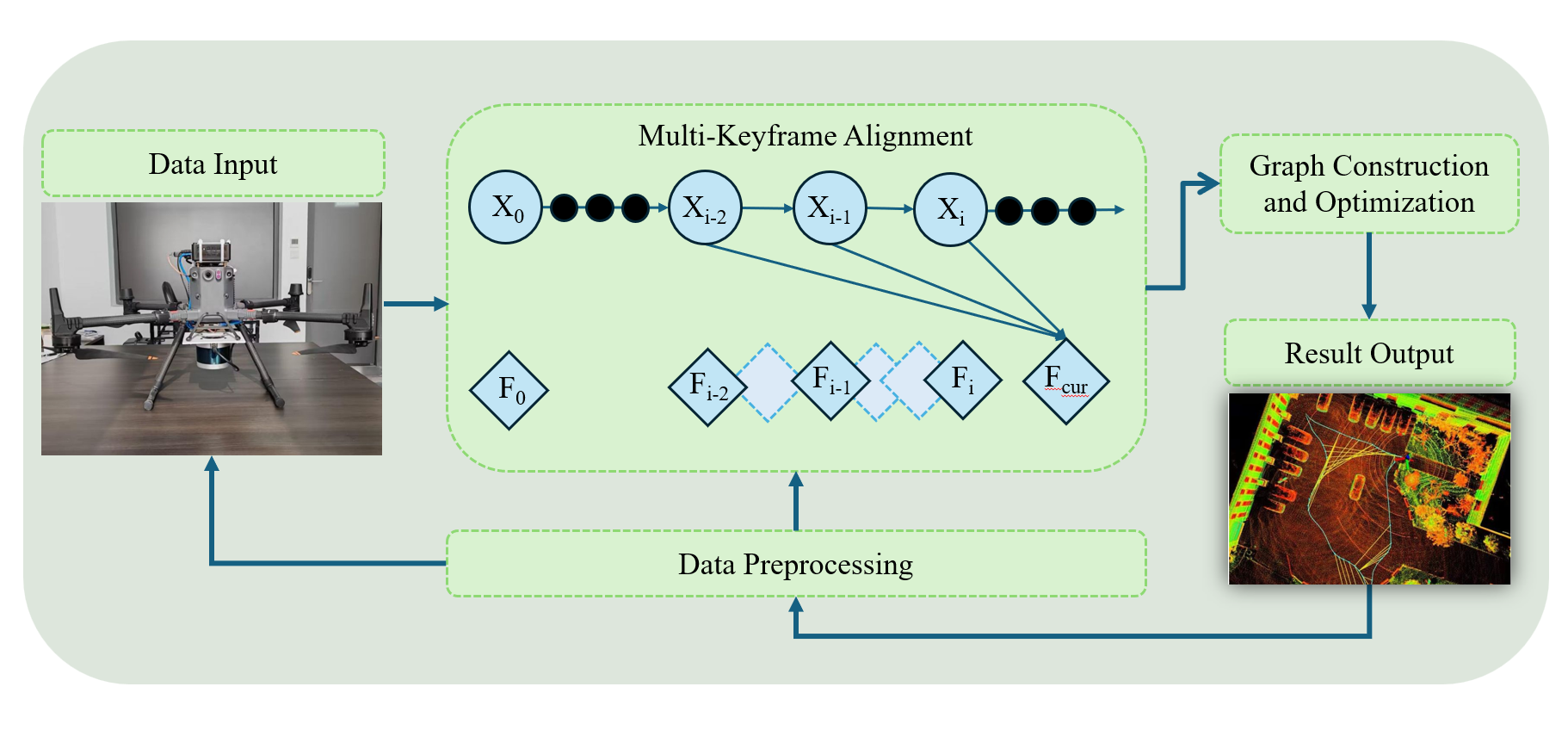
In unmanned aerial vehicle (UAV) applications, the performance of simultaneous localization and mapping (SLAM) systems often degrades under high-frequency vibrations induced by airflow and wind disturbances, which can corrupt LiDAR measurements and lead to pose estimation drift or even complete system failure. To address this challenge, this paper proposes a graph optimizationbased multi-keyframe SLAM method designed to enhance robustness and accuracy under strong vibration conditions. Unlike conventional approaches that align the current frame only with the most recent keyframe, the proposed method aligns each LiDAR frame with multiple historical keyframes to construct a factor graph. Each alignment is modeled as a relative pose constraint between nodes, while an adaptive weighting strategy based on spatial distance and temporal interval dynamically balances the contributions of different keyframes. Global pose optimization is then performed within a non-linear least squares framework using the Gauss–Newton method. Experimental results on the NTU VIRAL dataset demonstrate that the proposed method significantly reduces both trajectory and rotational errors compared with LeGO-LOAM, achieving improvements of up to 71% and 84% in position and orientation accuracy, respectively. Furthermore, real-world UAV experiments validate the effectiveness and reliability of the proposed approach, showing stable and accurate mapping performance even under rapid aerial motion and external disturbances.
Keywords:
UAV
; LiDAR–inertial SLAM
; graph optimization
; multi-keyframe
; vibration robustness
; localization and mapping
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



