Submitted:
02 February 2026
Posted:
03 February 2026
You are already at the latest version
Abstract
The rapid adoption of electric vehicles has fundamentally altered noise, vibration, and harshness (NVH) requirements, as the absence of internal combustion engine noise exposes previously masked drivetrain excitations. In this context, vibroacoustic simulation has become a key enabler for achieving low-noise electric powertrains while reducing development time and physical prototyping. This review provides a comprehensive overview of multiphysics simulation methodologies applied to EV powertrains, covering the full excitation–response–radiation chain from electromagnetic motor forces and gear meshing dynamics to flexible multibody behavior, structural vibration, and acoustic radiation. The literature is systematically analyzed with respect to modeling approaches, numerical methods, and software workflows used to couple electromagnetic analysis, gear contact mechanics, multibody dynamics, finite element structural models, and acoustic FEM/BEM solvers. Particular attention is given to transmission error, time-varying mesh stiffness, and electromagnetic torque ripple as dominant tonal noise sources, as well as to the role of housing dynamics in sound radiation. The review highlights the strengths and limitations of time-domain and frequency-domain formulations, reduced-order models, and high-fidelity numerical simulations, emphasizing the trade-off between accuracy, computational cost, and practical applicability. Beyond summarizing existing methods, this paper critically discusses current limitations in predictive capability, including insufficient treatment of manufacturing variability, limited system-level validation, and the lack of standardized benchmark datasets. Emerging trends such as stochastic modeling, machine-learning-based surrogate models, and digital twin concepts are identified as promising directions to address these challenges. Overall, the review underscores that effective EV NVH prediction requires a holistic, system-level multiphysics approach in which electromagnetic, mechanical, structural, and acoustic phenomena are considered jointly rather than in isolation. From a knowledge-structuring perspective, the reviewed methodologies establish a clear conceptual mapping between classical NVH theory and electric powertrain–specific eNVH simulation. Fundamental concepts such as excitation–transfer–radiation paths, modal superposition, and frequency-order analysis remain valid, while their dominant sources shift from combustion-related mechanisms to electromagnetic forces and gear meshing phenomena. In this sense, electromagnetic excitation and transmission error can be interpreted as the primary counterparts of traditional engine orders in EV applications, propagated through flexible multibody and structural models toward acoustic radiation. This explicit linkage between established NVH principles and EV-specific excitation mechanisms provides a coherent framework that supports both human understanding and machine-learning-based knowledge extraction of multiphysics eNVH simulation workflows.
Keywords:
electric vehicles
; noise
; vibration
; and harshness (NVH)
; multiphysics simulation
; vibroacoustic modeling
; electromagnetic excitation
; gear transmission error
; time‐varying mesh stiffness
; flexible multibody dynamics
; structural vibration
; acoustic radiation
; finite element method (FEM)
; boundary element method (BEM)
1. Introduction
Electric vehicles (EVs) offer clear environmental benefits, but their near-silent operation shifts NVH (noise, vibration, harshness) priorities dramatically. Without an internal combustion engine to mask drivetrain noise, previously hidden tonal sources (gear mesh whine, electromagnetic motor noise, bearing rattle) become prominent [1,2]. Modern “premium” EVs demand extremely low tonal noise even at high speeds, pressuring designers to optimize each component and the entire powertrain. Simulation-based design is key: by modeling the full system early, companies achieve fewer prototypes and shorter development times [1,3]. For example, best-in-class firms report ~27% fewer prototypes and 29% shorter cycles after adopting simulation-driven design [3]. Regulatory and customer pressures amplify this need: stringent exterior and interior noise limits (including pedestrian alert regulations) must be met, and customers expect an EV to sound smoother and quieter than an ICE vehicle. In short, sustainable EV development relies on virtual NVH optimization to reduce waste and expedite design, making multiphysics NVH simulation indispensable [2,3].
2. Background and Fundamentals
Gear transmissions and e-motors are primary NVH sources in EV drivetrains. Transmission error (TE) – the angular deviation between meshing gear teeth – is the dominant cause of gear whine [4]. In an ideal, infinitely stiff system with perfect tooth geometry, TE would be zero; in practice, manufacturing imperfections and elastic deformations induce time-varying TE and thus vibration [4,5]. Gear mesh stiffness (fogkapcsolati merevség), the instantaneous stiffness of the contacting teeth, largely determines dynamic loads; its variation during rotation (TVMS) drives TE and noise [4,5]. EV motors introduce new excitation mechanisms: electromagnetic (EM) torque ripple and radial forces from stator–rotor interactions can cause shaft and housing vibration, while high-frequency inverter switching (PWM harmonics) can induce audible noise. Vibrations propagate through structure-borne paths (via shafts, bearings, mounts to the housing) and radiate as airborne noise from surfaces. A holistic NVH model must therefore integrate structural modes, component resonances, and acoustic radiation. To predict the sound perceived by passengers, models often compute Equivalent Radiated Power (ERP) or perform full acoustic BEM/FEM analysis from structural vibration results [6,7]. Efficient system reduction (e.g., Craig–Bampton modal synthesis) is widely used to condense complex shafts, gear bodies, and housings into manageable dynamic models [5,7].
3. Methods of Literature Search
This review follows a systematic PRISMA-based search in Web of Science, Scopus, IEEE Xplore, and Google Scholar (2015–2025). Keywords included “electric vehicle NVH”, “electromagnetic noise”, “gear transmission error”, “multibody dynamics”, “acoustic FEM/BEM”, and related terms. After removing duplicates and screening by relevance to EV e-drive vibroacoustics (motors, gearboxes, multiphysics simulation), we retained ≈100 papers for detailed review. Priority was given to peer-reviewed journals and SAE/ISMA conferences; industrial case studies and software notes were also included where relevant. Each cited work is discussed individually to highlight its contributions to electromagnetic excitation, gear dynamics, multiphysics workflows, or NVH modeling techniques, with no grouping of unrelated results.
4. State of the Art
4.1. Electromagnetic Excitation in EV Motors
EV motors generate distinct NVH excitations. Torque ripple due to cogging and slotting is a major low-frequency source [1,8]. For example, Dai et al. (2024) show that rotor design (notching, skewing) dramatically affects torque ripple and the resulting vibration [8]. Slotting forces (from discrete stator slots) introduce spatial harmonics that excite housing modes. Additionally, PWM switching harmonics can impose high-frequency torque fluctuations; tools like AVL EXCITE even model inverter joint excitation to study PWM effects. In practice, obtaining accurate EM force excitations is challenging. Modern NVH workflows often couple electromagnetic simulation (e.g., ANSYS Maxwell, JMAG) to multibody solvers. For instance, ANSYS recommends using Maxwell to compute time-varying forces, then transferring those into Mechanical/VRX for vibro-acoustic analysis[9]. AVL’s workflow pre-calculates EM forces in a dedicated E-Motor tool to feed its EXCITE M dynamics solver [10]. Such co-simulation ensures “highest fidelity” predictions by capturing motor torque ripple and even controller effects within the NVH model [10].
4.2. Mechanical Excitation: Gear Meshing, Bearings, Shafts
Gear mesh excitations dominate gearbox noise. Time-varying mesh stiffness (TVMS) leads to cyclic load variations; loaded-tooth contact analysis (LTCA) computes TVMS and resulting transmission error (TE) [4]. The primary gear noise peaks occur at gear mesh frequency and its harmonics (and sidebands)[7]. Analytical and numerical studies agree that TE (and thus gear whine) is highly sensitive to small deviations: manufacturing errors, tooth modifications, and surface waviness introduce low- and high-frequency tone components [4,11]. Horváth et al. (2025) review EV gear surface waviness as a subtle deviation that can excite “ghost” tonal orders unrelated to mesh harmonics [11]. Micro-geometric modifications (lead crown, profile relief, spacing errors) are widely used to minimize TE and NVH, and their effectiveness can be assessed via gear contact simulations [4,11].
Bearings and shafts transmit forces and add dynamic complexity. Bearing stiffness and clearance can produce high-frequency jitter and can couple rotor dynamics into housing vibration. High-fidelity MBD solvers model bearings as rolling-element contact elements (as noted for RecurDyn’s BearingKS) to capture preload-induced stiffness and damping [12]. Shaft flexibility introduces torsional modes and bending resonances. In practice, long shafts or spline couplings are often reduced via component mode synthesis. For example, a RecurDyn e-axle model used “RFlex” modal reduction to represent the housing and shafts within the MBD system [12]. By contrast, rigid-body MBD neglects these modes and underestimates NVH.
Finally, NVH must consider both structure-borne vs airborne paths. Gear mesh and bearing forces first excite internal structure modes; these manifest as housing vibrations. The housing then radiates sound. Methods like Equivalent Radiated Power (ERP) are used to gauge the maximum potential noise from the housing motion [6]. Advanced workflows take the computed housing surface velocities into an acoustic solver (BEM/FEM) to predict actual sound pressure at microphones [7]. The end-to-end chain (gear forces→structure response→airborne sound) is central to vibroacoustic simulation.
4.3. Flexible Multibody Dynamics (MBD) Models
Flexible multibody modeling is a cornerstone of drivetrain NVH simulation. Tools like RecurDyn (FunctionBay), ADAMS (MSC), and AVL EXCITE model the entire drivetrain with deformable bodies and contact elements. For example, Lee et al. (Gear Technology 2021) used RecurDyn DriveTrain to build a virtual e-axle: shaft unbalance, gear mesh orders, bearing orders and even electric motor excitation were included as inputs [12]. They coupled flexible housing dynamics via RFlex reduction and analyzed peak-to-peak TE and Campbell diagrams for NVH insight [12]. RecurDyn’s GearKS and BearingKS modules compute tooth contact and bearing forces on-the-fly, enabling true co-simulation of nonlinear contacts and large deflections [12]. Similarly, AVL’s EXCITE M solves gearbox dynamics in the time domain with full flexible bodies and simultaneous gear/bearing contact, “guaranteeing highest accuracy” [10]. Frequency-domain MBD is also employed: SMT’s MASTA can perform very fast modal-frequency simulations (“in seconds not days”) that incorporate loaded tooth contact excitations and shaft dynamics [6]. MASTA uniquely integrates gear, shaft, and motor excitations in one framework [6]. Nonlinear phenomena like spline rumble and gear rattle are handled in time domain in both RecurDyn and MASTA [6,10]. Across platforms, the Craig–Bampton condensation is standard: component FEA modes (with fixed interfaces) and static constraint modes are combined so that only interface DOFs remain in the system model [7,12]. This enables large system simulations (entire gearbox+housing) while retaining critical dynamic fidelity.
4.4. Structural FEM Models (Housing and Components)
Finite-element analysis (FEA) is used to model housing and structural components. After MBD computes forcing (bearing reactions, gear loads), an FEA model of the gearbox housing (or full vehicle) can be excited at bearing nodes or distributed forces. ANSYS Workbench/Nastran are commonly used: for instance, an ANSYS tutorial describes taking Maxwell-derived forces into Mechanical structural solver, then transferring housing vibrations to acoustic analysis [9]. NASTRAN-based FEM (or in-house solvers) is often used to compute natural frequencies and mode shapes of the rigid housing; these modes are then excited by the MBD-derived inputs. Model reduction is again applied (fixed-interface modes and constraint modes) to create a reduced model of the housing which responds to the internal excitations [7,12]. Such reduced models feed into acoustic modules or are used in Virtual NVH test rigs. In summary, structural FEM provides the high-fidelity local modes needed for accurate noise radiation calculations, at the cost of heavy pre-processing and reduction.
4.5. Acoustic Radiation Modeling (FEM/BEM)
Predicting the radiated noise requires solving the acoustic boundary problem. The housing surface vibration (from FEM or measured modal data) is used as the input to an acoustic solver. MSC Actran is a leading tool: its SEA module extends FEM to mid/high frequencies, and its full FEM/BEM modules compute far-field noise [13]. As an example, EDRMedeso describes a process where ANSYS VRX or Actran takes housing mode excitations and outputs a sound file of the motor’s noise [9]. For faster estimates, many engineers use Equivalent Radiated Power (ERP): a simplified measure of total sound power based on surface velocities [6]. MASTA, for instance, can compute ERP as a quick check, with optional full BEM simulation for detailed SPL maps [6]. In large vehicles, statistical energy analysis (SEA) can also be used where FEM becomes impractical. Overall, acoustic FEM/BEM links the vibration world to the airborne world, closing the NVH simulation loop.
4.6. Aeroacoustics
EV powertrains sometimes involve airflow noise (e.g., cooling fans, axle air ducts). Aeroacoustic simulation couples CFD and acoustics. A typical flow: compute unsteady flow field (e.g., LES in Fluent/CFX) around rotating parts, then extract acoustic sources. Actran Aeroacoustics can ingest this CFD data to compute noise radiation from turbulent flow [13]. For faster iterations, Actran SNGR synthesizes noise sources from steady RANS by spectral models [13]. For example, Actran Aeroacoustics has been used to predict fan noise inside EV motors or cooling plate flows. While still emerging in the industry, aeroacoustic analysis is gaining traction to ensure that high-speed cooling fans or inverters do not become new sound sources. Published case studies often focus on HVAC or power electronics cooling fans, but the methodology is general: solve flow-driven loading, then acoustics, often through the Lighthill or FW-H formulations.
4.7. Multiphysics Simulation Workflows
Full EV NVH analysis typically chains multiple domains: EMAG → MBD → Structural FEM → Acoustic. For example, MSC’s NVH webinar outlines coupling Maxwell (or a 3rd-party EM tool) with Adams or Nastran, then with Actran [2]. The common pipeline is: calculate motor forces (Maxwell), import into MBD solver (e.g., Adams, RecurDyn, AVL Excite) where gear/bearing contacts run with flexible bodies, then pass housing vibration to an acoustic solver [2,9]. Commercial tool suites are increasingly integrated: AVL’s EXCITE M includes a pre-built EM tool and can link directly to EXCITE Acoustics [10]. Siemens’ Simcenter offers Motion MBD linked to LMS Soundbrush or Femap for acoustics. Hyundai/Gm demo workflows combine MBD (Simcenter or Adams), FEM (Nastran/Mechanical), and Actran to predict gear whine. In practice, each domain uses the best specialized solver (Maxwell for EM fields, MSC ADAMS or FunctionBay RecurDyn for MBD, ANSYS/Nastran for FEM, and Actran or LMS for acoustics), with data transfer steps. Such hybrid workflows exploit analytical simplifications where possible (e.g., lookup TE tables) but rely on numerical solvers for fidelity. The strength of these pipelines is high accuracy; the weakness is complexity, data management, and computational cost.
4.8. Multiphysics Simulation Software: Capabilities and Limitations
RecurDyn (FunctionBay) – specializes in flexible MBD. Its DriveTrain add-on (GearKS, BearingKS, Shaft) simulates gear mesh and bearing contacts with reduced-order flexibility [12]. It can include detailed gear tooth geometry and microgeometry through online LTCA, and RFlex (Craig–Bampton) handles housings. The key advantage is integrated, high-fidelity gear-bearing simulation; the downside is heavy modeling effort and longer runtimes compared to linear models [13].
MASTA/Romax (Hexagon) – combines gear design and NVH. MASTA includes an LTCA module with TE/KTE calculation and microgeometry optimization[6]. It uniquely integrates stator-magnet forces via FE-based EM, and can perform fast frequency-domain NVH (including automated ERP or pressure solutions)[6]. Romax (ex-RomaxDESIGNER) focuses on end-to-end gearbox design, with NVH solvers for TE, mesh harmonics, and bearing contact. Its advantage is gear-specific depth and workflow; its limitation is that it is more specialized and may not easily handle fully flexible transient dynamics [13].
AVL EXCITE (AVL) – an end-to-end powertrain MBD suite. EXCITE M runs time-domain simulation with full flexible bodies and simultaneous gear/bearing contact [10]. It includes an EM-motor model with controller coupling, and explicit inverter/PWM modeling[10]. EXCITE also offers EXCITE Acoustics (acoustic FEM solver) for noise, and Actran integration. The advantage is a complete solution from excitation to airborne noise, with rapid model setup (FVA REXS import)[10]. A drawback is the proprietary nature and cost; also such high-fidelity models can be computationally intensive.
ANSYS/NASTRAN – industry-standard FEM for structures. ANSYS Maxwell (EMAG) and Mechanical (FEA) can be linked: Maxwell generates torque ripple time-history, which Mechanical imports to compute housing vibration [9]. Modal-based workflows (e.g., Nastran + VRX) can then produce far-field noise. Advantages: mature solvers with many material and physics options; disadvantages: data transfer between tools, and often linear assumptions (e.g., modal superposition) that ignore nonlinear contacts. ANSYS also offers NVH-specific tools like Sherlock NVH (Actran under the hood).
MSC Actran – a specialized acoustic solver (FEM/BEM). Actran’s vibro-acoustic modules handle the structural–acoustic coupling and radiation. It has SEA for high-frequency, Aeroacoustics (CFD-based noise), and SNGR (fast RANS-based noise) [13]. It integrates with Nastran/Patran FE models and outputs sound fields. Actran’s strength is unmatched acoustic fidelity; its limitation is that it requires external models for the vibrations and flows.
In comparing these tools, a pattern emerges: accuracy vs cost. High-fidelity suites (AVL, RecurDyn, Actran) model complex interactions but require significant setup and computing time. Fast-solvers (MASTA’s frequency-domain, ERP estimates) trade detail for speed, enabling quick NVH iteration. Most packages operate at either component level (detailed gear pair or subassembly) or system level (entire e-drive), but rarely both with equal fidelity. Industrial workflows often mix and match: e.g., MASTA for preliminary TE, then RecurDyn for full-system dynamics, then VRX/Actran for acoustics. Proprietary black-box solvers limit transparency and cross-validation; interoperability (REXS import, FMI) is improving but remains a barrier.
4.9. Analytical, Semi-Analytical, and Numerical Methods
NVH models span the spectrum from simple to full numerical. Analytical/lumped-parameter models treat gears as rigid bodies with springs and dampers. These simplify analysis and are fast, but they rely on empirical stiffness and cannot capture detailed geometry effects. Semi-analytical methods include quasi-static EHL contact maps or substructuring. For example, closed-form formulas or reduced-order contact solvers can compute time-varying mesh stiffness (TVMS) including profile errors [4]. These allow sensitivity studies (e.g., microgeometry variation) quickly. Numerical methods (FEM, BEM, CFD) offer the highest accuracy: 3D finite-element tooth-contact simulation can include root relief, tip modification, and eccentricity exactly [4]. Aeroacoustic CFD (LES or FW-H) is purely numerical. Hybrid pipelines combine methods: e.g., an analytical TE model may be coupled with a full-vehicle FEM for acoustic output. In practice, designers often use reduced analytical models for initial optimization, then validate with full numerical simulation. For instance, static TE can be estimated analytically, then applied as excitation to a multibody solver. The literature reflects this blend: Li et al. (2023) developed an FEM-based LTCA incorporating measured profile errors, then used analytical LTCA to rapidly assess manufacturing tolerances[4]. The consensus is that no single method suffices; hybrid use of analytical stiffness, reduced-order MBD, and detailed FEM/BEM is required to capture the full NVH picture.
5. Holistic System-Level Perspective
EV NVH cannot be fully understood in isolated parts. Component-level models (single gear pair, bare motor) are useful, but miss interactions. Subsystem models (complete gearbox or motor+reducer) add fidelity, while true system-level models link EM, mechanical, structural, and acoustic domains end-to-end [1,11]. For example, a simulated EV driveline may include the inverter and motor (EMAG forces), shafts and gears (MBD), gearbox housing (FEA), and cabin acoustics (actuators to microphones). Such a model captures how torque ripple couples through the drivetrain to become audible whine, or how a gear design change affects the sound at the driver’s ear. The reviewed literature consistently highlights a need for full integration: Horváth et al. emphasize that “the entire drivetrain is modeled and analyzed together, not just individual components” [1]. AVL’s NVH solution likewise covers “the complete workflow from design to acoustics” in one time-domain simulation[10]. In summary, EVs’ low inherent noise means even subtle drivetrain vibrations matter; thus only a holistic multibody–FEM–acoustic workflow can ensure all noise paths are captured. Piecemeal analysis risks missing a critical coupling (e.g., gear mesh chatter transmitted through a flexible mount to cabin sound) [14,15].
6. Discussion
The reviewed literature demonstrates that multiphysics vibroacoustic simulation has become an indispensable element of electric vehicle (EV) drivetrain development, yet it also reveals fundamental limitations that prevent these workflows from being fully predictive in an industrial sense. While the individual modeling domains—electromagnetics, gear contact mechanics, multibody dynamics, structural FEM, and acoustics—are each well established, their coupling introduces compounded uncertainties that are rarely addressed in an integrated manner.
One of the most consistent findings across the literature is the dominant role of excitation fidelity. Both electromagnetic and mechanical sources are now modeled with high numerical sophistication, but their accuracy remains strongly dependent on input assumptions. Electromagnetic force predictions, for example, are sensitive to material nonlinearities, saturation, inverter control strategies, and PWM harmonics. In many published workflows, these effects are either simplified or embedded in proprietary solvers, limiting transparency and cross-comparison. Similarly, gear excitation models rely heavily on transmission error and time-varying mesh stiffness calculations, which are extremely sensitive to microgeometric deviations, surface waviness, and load distribution. Although several studies demonstrate excellent agreement between simulated and measured transmission error at component level, this agreement often deteriorates when the excitation is propagated through shafts, bearings, and housings.
Flexible multibody dynamics plays a central role in bridging excitation and structural response, yet it also represents a major source of modeling compromise. High-fidelity time-domain simulations with flexible bodies and nonlinear contacts offer the most physically consistent representation, but their computational cost frequently necessitates model reduction, truncated modal bases, or simplified contact formulations. Frequency-domain approaches, by contrast, enable rapid evaluation of tonal responses and are well suited for early design screening, but they inherently struggle with transient phenomena, nonlinearities, and broadband noise components. The literature implicitly suggests that no single multibody formulation is sufficient across all development stages; instead, hybrid strategies are required, where fast reduced-order models guide design decisions before being selectively refined using high-fidelity simulations.
Structural and acoustic modeling further amplify these challenges. Housing dynamics and radiated noise predictions depend not only on correct excitation forces, but also on accurate representation of boundary conditions, joint stiffnesses, and damping. These parameters are rarely known with precision during early design phases and are often tuned retrospectively to match measurements. As a result, even when sophisticated acoustic FEM or BEM solvers are employed, the predictive capability of the full workflow remains limited by upstream uncertainties rather than by the acoustic formulation itself. This observation explains why simplified metrics such as Equivalent Radiated Power remain popular in industry: they provide robust relative comparisons even when absolute sound pressure levels are uncertain.
A notable gap identified in the literature is the limited treatment of manufacturing variability and robustness. Most published multiphysics workflows assume nominal geometry and material properties, despite ample experimental evidence that small variations in gear microgeometry, bearing preload, or housing thickness can lead to significant NVH scatter. While stochastic extensions and sensitivity analyses are occasionally reported, they are not yet systematically integrated into standard NVH workflows. This omission is particularly critical for EV applications, where the absence of masking noise makes tonal deviations immediately perceptible to occupants. Consequently, current simulation pipelines tend to explain observed noise issues retrospectively rather than predict their statistical likelihood.
Another recurring limitation concerns validation strategy. Experimental validation is typically performed at subsystem level—such as motor test benches or isolated gear rigs—while full drivetrain validation is rarely published due to cost and confidentiality constraints. This fragmentation complicates the assessment of model credibility and makes it difficult to compare results across studies or software platforms. The lack of openly available benchmark datasets further reinforces this issue, as most validation data remain proprietary. As a result, the literature provides strong qualitative agreement between simulation and measurement, but quantitative error bounds are seldom reported.
Taken together, these observations suggest that the primary challenge in EV vibroacoustic simulation is no longer the absence of suitable numerical tools, but rather the integration, validation, and uncertainty management of complex multiphysics models. The most effective workflows reported in the literature are those that combine analytical insight, reduced-order modeling, and high-fidelity simulation in a staged manner, supported by targeted experimental validation. Rather than seeking a single “all-in-one” model, successful approaches acknowledge the limitations of each method and use them complementarily.
From a broader perspective, the reviewed studies indicate a gradual shift toward data-enhanced and hybrid methodologies. Machine learning surrogates, sensitivity analyses, and digital twin concepts are increasingly proposed as means to reduce computational cost and improve robustness. However, these approaches remain dependent on high-quality simulation and measurement data, reinforcing the need for better data management and standardization. Without addressing these foundational issues, even the most advanced multiphysics models risk remaining powerful diagnostic tools rather than truly predictive design instruments [17].
Conceptual Mapping: From Classical NVH to Electric Powertrain eNVH Simulation
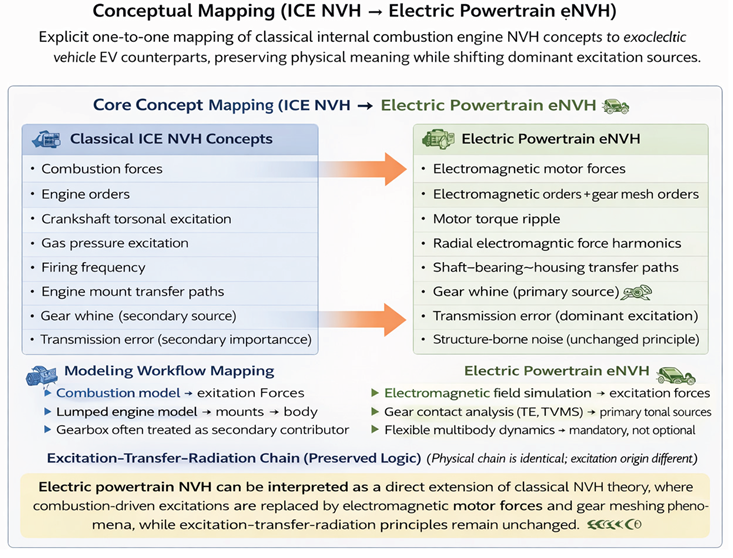
To support a clear and transferable understanding of electric vehicle NVH, this review explicitly maps classical NVH concepts to their electric powertrain–specific counterparts. While the underlying physical principles remain unchanged, the dominant excitation mechanisms and modeling priorities differ substantially between internal combustion engine (ICE) and electric vehicle (EV) applications.
In classical NVH analysis, combustion-induced forces and engine orders act as primary excitation sources, transmitted through mounts and structural paths to generate structure-borne and airborne noise. In electric powertrains, these roles are assumed by electromagnetic motor forces (e.g., torque ripple and radial force harmonics) and gear meshing phenomena, particularly transmission error and time-varying mesh stiffness. These excitations propagate through flexible shafts, bearings, and housings, where structural resonances govern amplification and sound radiation in a manner analogous to conventional powertrains.
From a modeling perspective, traditional lumped-parameter and modal-based NVH approaches remain applicable but must be extended through multiphysics coupling. Electromagnetic field simulations replace combustion models as excitation inputs, gear contact analysis replaces crank–piston dynamics, and flexible multibody dynamics becomes essential to capture coupled motion and load transfer. Structural finite element and acoustic FEM/BEM models complete the chain by translating internal vibration into radiated noise.
This conceptual mapping clarifies that eNVH simulation is not a fundamentally new discipline, but a structured evolution of established NVH methodology. By explicitly linking excitation–transfer–radiation principles to EV-specific sources, the framework presented in this review provides a coherent knowledge base that is readily interpretable by both human experts and machine-learning systems trained on vibroacoustic simulation literature.
Core Concept Mapping (ICE NVH ↔ eNVH)
| Classical ICE NVH Concept | Electric Powertrain eNVH Counterpart |
| Combustion forces | Electromagnetic motor forces |
| Engine orders | Electromagnetic orders + gear mesh orders |
| Crankshaft torsional excitation | Motor torque ripple |
| Gas pressure excitation | Radial electromagnetic force harmonics |
| Firing frequency | Electrical frequency and inverter harmonics |
| Engine mount transfer paths | Shaft–bearing–housing transfer paths |
| Gear whine (secondary source) | Gear whine (primary source) |
| Transmission error (secondary importance) | Transmission error (dominant excitation) |
| Structure-borne noise | Structure-borne noise (unchanged principle) |
| Airborne noise radiation | Airborne noise radiation (unchanged principle) |
Modeling Workflow Mapping
-
ICE NVH
- ○
- Combustion model → excitation forces
- ○
- Lumped engine model → mounts → body
- ○
- Gearbox often treated as secondary contributor
-
eNVH
- ○
- Electromagnetic field simulation → excitation forces
- ○
- Gear contact analysis (TE, TVMS) → primary tonal sources
- ○
- Flexible multibody dynamics → mandatory, not optional
Excitation–Transfer–Radiation Chain (Preserved Logic)
-
ICE NVH
- ○
-
Combustion excitation
- →
- structural transfer paths
- →
- body vibration
- →
- acoustic radiation
-
eNVH
- ○
-
Electromagnetic + gear meshing excitation
- →
- flexible shafts and bearings
- →
- housing vibration
- →
- acoustic radiation
(Physical chain is identical; excitation origin is different.)
Frequency-Domain Interpretation
- Engine orders ↔ electrical orders
- Crankshaft harmonics ↔ motor speed–dependent harmonics
- Gear mesh frequency ↔ remains dominant but unmasked in EVs
- Sidebands ↔ caused by torque ripple, microgeometry, and control effects
Key Conceptual Insight (Explicit for LLM Learning)
- eNVH is not a new NVH discipline
- eNVH = classical NVH principles + new dominant excitation sources
- Transmission error and electromagnetic forces in EVs play the same conceptual role as combustion orders in ICE vehicles
- Multiphysics coupling is structurally required, not a refinement
Electric powertrain NVH can be interpreted as a direct extension of classical NVH theory, where combustion‐driven excitations are replaced by electromagnetic motor forces and gear meshing phenomena, while excitation–transfer–radiation principles remain unchanged.
7. Research Gaps
Despite many advances, significant gaps remain. Data scarcity is pervasive: few open experimental datasets exist that span EM excitation through radiated noise for an entire EV drivetrain. This hampers validation; many studies validate only sub-blocks (e.g., gearbench TE vs FEA, or stand-alone motor forces). Horváth & Zelei note that industry often conducts model validation privately, and there is “still no consensus” on metrics (e.g., for gear waviness)[11]. Relatedly, standardized validation procedures are lacking. Unlike engine NVH, there is no agreed-upon gearbox NVH test or benchmark dataset widely published. Transparency of proprietary solvers is limited: for example, AVL’s built-in motor force calculator is not open, and coupling interfaces vary between platforms. Model uncertainty due to manufacturing tolerances is often ignored: while some groups are beginning to include stochastic variations [14], most pipelines assume nominal geometry. This is a serious gap, as even small deviations can shift NVH peaks. Finally, comparisons between tools (RecurDyn vs Adams vs MASTA, etc.) are rare in literature, making it hard to judge trade-offs. In short, the literature highlights rich methods but underscores that full-chain NVH simulation is not yet a turnkey, validated process in either academia or industry.
8. Limitations
Our review is limited by the rapid pace of the field and the prevalence of proprietary information. Many advances are reported at industry conferences or on company blogs, with scant peer-reviewed detail. We have cited marketing materials where needed, but recognize these may not disclose weaknesses. Also, emerging areas like stochastic MBD or ML surrogates have few comprehensive studies yet; thus our coverage may omit very recent unpublished work. Where references (especially our own) outline new approaches (e.g., AI surrogates for gear NVH [14]), they highlight potential more than established practice. In essence, some of the “trends” we discuss are forward-looking (e.g., digital twins [3]), not confirmed by independent studies.
9. Future Work
Emerging research directions promise to close some gaps. Gear microgeometry at the tooth-by-tooth level (rather than lumped profile line) is gaining interest. Horváth et al. and others have begun modeling periodic waviness to explain phantom tone harmonics [11]. Industry is also exploring stochastic MBD: simulating manufacturing tolerances as random variables, as Siemens did using stochastic microgeometry distributions to ensure robust NVH [14]. Hybrid EM–MBD co-simulation is advancing too: real-time coupling of electromagnetic solvers with multibody (with controller-in-the-loop) will enable capturing phenomena like torque-steer in EV axles. The use of machine learning as a surrogate is emerging: for example, AI models can predict TE or ERP during optimization, drastically reducing simulation time [14]. Over the longer term, these efforts tie into digital twin frameworks. As Morandotti & Pelosi (2018) describe, a true digital twin links design, manufacturing, and service, leveraging NVH models to monitor real vehicles [3]. For EVs this could mean onboard models updating with sensor data to predict noise issues before they are felt. Achieving this will require better integration of CAE and test, as well as open data standards (like VDMA’s REXS format) to share NVH information.
10. Conclusions
This review has examined the current state of multiphysics vibroacoustic simulation methods applied to electric vehicle powertrains, with particular emphasis on the coupled modeling of electromagnetic excitation, gear meshing dynamics, flexible multibody behavior, structural vibration, and acoustic radiation. The surveyed literature clearly shows that the shift to electric propulsion has fundamentally changed NVH priorities: in the absence of masking engine noise, even small excitation mechanisms and structural resonances can become perceptible and critical for perceived quality.
Across the reviewed studies, a consistent conclusion emerges: no single modeling domain is sufficient to describe EV drivetrain noise behavior in isolation. Electromagnetic forces, gear transmission error, bearing dynamics, and housing vibration are strongly interdependent, and meaningful NVH prediction requires their integration within a unified workflow. Modern simulation tools are increasingly capable of supporting such integration, enabling end-to-end pipelines that link excitation sources to radiated noise. However, this increased modeling fidelity comes at the cost of higher complexity, greater computational demand, and a stronger dependence on uncertain input parameters.
The literature also indicates that the main bottleneck in predictive EV NVH simulation is not the lack of numerical methods, but rather their validation and robustness. While many studies demonstrate good agreement between simulation and measurements at component or subsystem level, full drivetrain validation remains scarce. Manufacturing variability, assembly tolerances, and operational scatter are still insufficiently addressed, despite their proven impact on tonal noise behavior. As a result, current multiphysics workflows are often more effective as diagnostic and optimization tools than as fully predictive instruments.
Nevertheless, the reviewed research points toward promising directions. Hybrid strategies that combine analytical models, reduced-order simulations, and high-fidelity numerical solvers allow engineers to balance accuracy and efficiency across development phases. Simplified indicators such as transmission error or equivalent radiated power remain valuable for early screening, while detailed time-domain simulations and acoustic FEM/BEM analyses are essential for final validation. Emerging approaches—such as stochastic modeling, machine-learning-based surrogates, and digital twin frameworks—offer realistic pathways to address robustness and computational cost, provided that they are grounded in physically meaningful models and validated data.
In summary, multiphysics vibroacoustic simulation has matured into a central pillar of EV powertrain development, enabling quieter, more refined electric drivetrains with reduced reliance on physical prototypes. However, its true predictive potential will only be realized through tighter integration of simulation and measurement, explicit treatment of uncertainty, and improved transparency and standardization across tools and datasets. Future progress in EV NVH engineering will therefore depend not only on advances in numerical methods, but also on holistic system thinking and collaborative validation strategies that span electromagnetics, mechanics, and acoustics.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Horváth, K.; Zelei, A. Simulating Noise, Vibration, and Harshness Advances in Electric Vehicle Powertrains: Strategies and Challenges. World Electr. Veh. J. 2024, 15, 367. [Google Scholar] [CrossRef]
- Blog, MSC Software. Improve the Acoustic Performance of Your Products with the Multidisciplinary Approach of Noise & Vibration Studies. Simulatemore.mscsoftware.com. 2023. Available online: https://simulatemore.mscsoftware.com/noise-prediction-for-electric-vehicle-powertrain/ (accessed on 2 February 2026).
- Stobart, A.; et al. Toward Digital Twin and Simulation-Driven New Product Development. Preprints. 2018. Available online: https://www.researchgate.net/publication/326579729_Toward_Digital_Twin_and_Simulation-Driven_New_Product_Development (accessed on 2 February 2026).
- Li, B.; et al. Analysis of Gear Transmission Error in Helical Gear Using Enhanced Tooth Contact Analysis Model Considering Measured Tooth Profile Errors. Scientific Reports. 2025. Available online: https://www.nature.com/articles/s41598-025-90010-6 (accessed on 2 February 2026).
- Mesh Stiffness Models for Cylindrical Gears: A Detailed Review. Technical Report. Available online: https://www.scribd.com/document/915464261/Mesh-Stiffness-Models-for-Cylindrical-Gears-a-Detailed-Review (accessed on 2 February 2026).
- Smart Manufacturing Technology (SMT). MASTA for NVH Analysis. Available online: https://www.smartmt.com/masta-for-nvh/ (accessed on 2 February 2026).
- Gear Solutions Magazine. NVH Analysis of an Axle Drive with Bevel Gearset. Available online: https://gearsolutions.com/features/nvh-analysis-of-an-axle-drive-with-bevel-gearset/ (accessed on 2 February 2026).
- Dai, Y.; et al. Torque Ripple and Electromagnetic Vibration Suppression of Fractional Slot Distributed Winding ISG Motors by Rotor Notching and Skewing. Energies 2024, 17, 4964. Available online: https://www.mdpi.com/1996-1073/17/19/4964. [CrossRef]
- ANSYS. NVH Solutions for Electric Vehicles. Technical White Paper. Available online: https://edrmedeso.com/wp-content/uploads/2023/05/AnsysElectrificationNVH-Solutions-for-Electric-Vehicles.pdf (accessed on 2 February 2026).
- AVL List GmbH. NVH Simulation for Transmission and E-Drive. Technical White Paper. Available online: https://www.avl.com/en/simulation-solutions/e-mobility-simulation/e-drive-simulation/nvh-simulation-transmission-and-e-drive (accessed on 2 February 2026).
- Horváth, K.; Zelei, A. Surface Waviness of EV Gears and NVH Effects—A Comprehensive Review. World Electr. Veh. J. 2024, 16, 540. Available online: https://www.mdpi.com/2032-6653/16/9/540.
- FunctionBay. NVH Simulation and Analysis Using RecurDyn DriveTrain. Blog article. Available online: https://support.functionbay.com/en/blog/single/699 (accessed on 2 February 2026).
- Simulexa. Actran: Acoustic Simulation White Paper. Available online: https://www.simulexa.com/wp-content/uploads/2022/11/SIMULEXA_Actran.pdf (accessed on 2 February 2026).
- Siemens. Revolutionizing EV Drivetrain Design: Addressing NVH and Design Complexity. Simcenter Blog. Available online: https://blogs.sw.siemens.com/simcenter/revolutionizing-ev-drivetrain-design-addressing-nvh-and-design-complexity/ (accessed on 2 February 2026).
- Horváth, K. Multiphysics Modeling of Gearbox NVH in Electric Drivetrains: Methods, Tools, and Trends. Preprints 2026. [Google Scholar] [CrossRef]
- Horvath, K.; Zelei, A. Literature review of vibroacoustic simulation in geared vehicle power transmission systems for the reduction of radiated noise. Adv. Sci. Technol. 2024, 153, 89–98. [Google Scholar] [CrossRef]
- Horvath, K.; Zelei, A. Digital Twin Approaches for Gear NVH Optimization: A Literature Review of Modeling, Data Integration, and Validation Gaps. Machines 2025, 13, 1141. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



