
Submitted:
30 January 2026
Posted:
02 February 2026
You are already at the latest version
Abstract
The present study investigates the influence of low temperature on starting torque, viscous friction, and power intensity of a precision cycloidal reducer TwinSpin TS 140115EP190583. Two types of plasticity lubricants with differing viscosity were compared in the experiment: Castrol TT1 (low-viscosity, optimized for low-temperature) and Vigo RE0 (higher viscosity, designated for greater loads). The measurements were taken in a climate chamber in the temperature ranging from +24 °C to −20 °C in the mode accounting for no external load. The results have shown that Castrol TT1 maintains its beneficial rheological properties at as low as −20 °C, which is manifested in low starting torque (~0.30 Nm) and low power intensity (~0.33 kW). On the contrary, Vigo RE0 shows a significant increase in friction – at −20 °C, the starting torque is 1.0–1.1 Nm and the power intensity of the operation increases to consume more than 1.5 kW. The study has confirmed that the correct choice of lubricant is the critical factor in reliable starting and efficient operation of reducers in extreme cold.
Keywords:
precision reducer
; cycloidal gearbox
; starting torque
; viscous friction
; low-temperature lubricants
; power efficiency
1. Introduction
Operating precision reducers under extreme climate conditions is one of the greatest technical challenges of present-day mechanical engineering. Being the basic integral part of many robotic, aviation, power-generating or defense applications, reducers must ensure reliable transmission of torque and precise positioning also at ambient temperatures lying below the freezing point. Under such conditions, physical properties of lubricants, which are the crucial element in proper functioning of the mechanism, change. The lubricant’s viscosity, its ability to retain the lubricating film and to withstand low temperatures directly influence the starting torque, power efficiency, and the life of the device.
Lubricants used in reducers must meet several conflicting demands. On the one hand, they must ensure sufficient protection against wear and corrosion; on the other hand, they have to demonstrate low viscosity at low temperatures not to impede the mechanism’s motion. In practice, there is often a trade-off between protection and efficiency. A higher-viscosity lubricant offers better protection but increases the starting torque and power losses, while a lower-viscosity lubricant enhances efficiency but may have a limited ability to protect surfaces under greater load.
The importance of the correct lubricant choice increases especially in applications where reducers are used in ambient temperatures below zero – for example, in aviation technology, aerospace applications, power generation (wind turbines in the arctic), or in mobile robotic systems deployed in conditions of extreme climate. In these cases, reliable start of the device at low temperature is a critical factor deciding the success or failure of the entire application. Operating precision reducers at ambient temperatures below zero is extraordinarily difficult on technology. Viscous properties of the lubricant directly influence the starting torque and power efficiency of the device. If the choice of the lubricant is short of the best, this may result in increased friction, wear or even failure of the mechanism.
Starting torque is one of the most important parameters determining reducer behavior at low temperatures. This is the least starting torque necessary for actuating the reducer after a longer idle time, i.e., for overcoming the internal resistance of bearings, viscous and rigid friction of the lubricant, friction resistance of the sealings and resistances connected to the backlash and pre-stress of the gears. If the starting torque is too high, this may lead to drive overload, delayed start or even mechanism failure. Once the reducer is running, viscous friction influences power efficiency and power consumption. That is why these parameters need to be put under scrutiny and compared in applications where lubricant types vary [1,2].
The power intensity of a reducer operation is closely linked to torque and speed of rotation. This relationship may be expressed by the basic output equation:
Where P is the input power, T is the torque and ω is the angular velocity. Thus, higher lubricant friction will immediately manifest itself in greater power consumption.
The starting torque of a reducer at low temperatures is influenced not only by the lubricant viscosity but also by its ultimate sheer strength. This fact may be expressed by an equation derived from the Bingham plastic model [3]:
Where τ0 stands for the lubricant ultimate sheer strength; A represents the effective sheer area; r is the impacting area’s radius; µ represents plasticity viscosity and ω angular speed. This equation shows that the starting torque consists of two components – the limit component, predominant at start-up in the cold; and the viscous component, increasing with the speed of rotation.
As has been pointed out by the authors of the study [3], applying the Bingham model to lubricants enables accurate description of plasticity lubricants‘ behavior in tribological systems and provides an explanation of differences between low- and high-viscosity lubricants at extreme temperatures.
Arrhenius type of equations is often used in describing the dependence of viscosity on temperature:
Where:
- η(θ) – dynamic viscosity at temperature θ [Pa.s]
- η0 – reference viscosity (a lubricant-dependent constant)
- Ea – activation energy of the flow [J/mol]
- R – universal gas constant (8.314 J/(mol.K))
- θ – temperature [K]
At low temperatures, the viscosity of lubricants increases significantly as is demonstrated in increased internal friction, which translates into greater starting torque of the mechanism. This temperature-induced effect accounts for a critical factor, especially in applications requiring reliable motion initiation (recall the above examples of aviation and aerospace technology, as well as technical devices operated under extreme ambient conditions) [4,5].
Current research in the area of tribology and lubricants points to a few fundamental known facts:
- Lubricant viscosity at low temperatures is directly linked to power intensity of the start-up. Studies have demonstrated that at temperatures close to and below the pour point, the flow deteriorates dramatically and the risk of mechanism failure grows. It is then oftentimes the case that supply of the lubricant becomes a problem [4].
- Studies on cycloidal reducers point to the significance of thermal stability and correct lubrication at high and low temperatures, which is directly applicable to precision reducers of TwinSpin type as well [9].
- Following the analysis of the works published on the topic of interest, it may be stated that lubricants designated for extremely cold environments must combine low viscosity, high wear resistance, and stability over long term use.
The present study focuses on experimental comparison of behavior of the TS 140-115-E-P19-0583 reducers filled with two types of lubricants – Castrol TT-1 and Vigo RE-0 – at low temperatures. Castrol TT-1 is a lubricant with lower base viscosity and low-temperature additives, designed for sub-zero applications. Vigo RE-0 has a higher base viscosity and is designed for applications where higher load is expected; its behavior at low temperatures might pose a problem, though. Comparison of these two lubricants offers valuable information on how the choice of lubricant influences the starting torque, viscous friction, and power efficiency of reducers (see Table 1).
The choice of the particular Castrol TT-1 and Vigo RE-0 for the TS 140-115-E-P19-0583 reducer tests was deliberate. The primary goal was to compare two different types of lubricants representing differing approaches to lubrication in low-temperature environments [10,11]:
-
Castrol TT-1
- A lubricant with lower base viscosity and special low-temperature additives.
- Designed for applications where the ambient temperatures are expected to be sub-zero.
- It was assumed its starting torque and viscous friction would be lower, which is crucial for a reliable start-up of the mechanism.
-
Vigo RE-0
- A lubricant with higher base viscosity, designed for applications with greater load.
- Offers robust wear protection but its behavior at low temperatures is less than optimal.
- The contrasting choice for the tests was to prove how a higher viscosity influences the starting torque and power efficiency in frost.
The essence of the study conducted lies in the comparison of two extremes: one lubricant optimized for low temperatures (TT-1) and the other one with higher viscosity (RE-0) suitable for regular conditions but posing problems in the cold. Such comparison makes it possible to express differences in relative (percentage) changes with respect to the reference state, which will make the comparison of the results between different types of reducers and different operating conditions easier.
The operation of mechanical systems in low-temperature environments has been a long-studied yet insufficiently explored area of tribology and drive design. A key factor that fundamentally affects the functionality of rotating mechanisms at low temperatures is the behavior of lubricants. A drop in temperature leads to a significant increase in viscosity, a change in rheological properties, and a transition of the lubricant to a regime dominated by limit friction and rigid friction. These phenomena are directly reflected in an increase in starting torque, impaired energy efficiency, and a risk of failure to start-up the device.
Important works in the area of low-temperature lubricants rheology (e.g., [12,13,14,15,16,17,18,19,20,21,22,23,24,25]) analyze the temperature dependence of viscosity, the pour point, and the increase in the starting torque mostly at the level of the bearings or simple tribological nodes. These studies provide an important theoretical framework, but do not offer a detailed view of the behavior of complex gearbox mechanisms as are precision cycloidal reducers. Similarly, research focused on rheological modeling of lubricants at low temperatures (including applications of the Bingham model) emphasizes the importance of ultimate shear strength and viscous friction, but their application to real gearbox systems is only marginally mentioned in the literature.
The application materials of lubricants producers (e.g., MOLYKOTE, DuPont) address synthetic oils and plasticity lubricants optimized for low-temperature environments and cite results of low-temperature torque tests. Nevertheless, as a rule, these sources do not offer consistent experimental comparisons of how the lubricants behave in specific gearbox types, nor do they analyze the impact of the lubricants on the starting torque or viscous friction in dynamic conditions [26]. Their contribution lies primarily in providing the lubricants‘ typology rather than in evaluating their interactions with precision mechanisms.
Documents related to cycloidal gearboxes, including TwinSpin gearboxes, emphasize the need for proper lubricant selection and provide recommendations for their operation in low-temperature applications. However, they do not include systematic experimental studies comparing starting torque, viscous friction, and power consumption with different types of lubricants and over a wide range of low temperatures [27]. The available literature focuses more on the design parameters, accuracy, and dynamic properties of gearboxes, rather than on tribological behavior at extreme temperatures.
The above review shows that despite the existence of numerous works devoted to low-temperature rheology of lubricants and general tribological phenomena, experimental studies that would comprehensively evaluate the influence of lubricant on the starting torque and viscous friction of precision cycloidal reducers in severe frigid conditions are lacking. This gap is particularly significant given the growing demand for reliable drives for robotic, aerospace, power-generating and mobile systems operating in extreme climatic conditions.
2. Experimental Methodology
Experimental measurements were designed to quantify the effect of low temperature on the starting torque and torque losses related to internal and viscous friction of the lubricant in the precision cycloid reducer TwinSpin TS 140-115-E-P19-0583. The tests were conducted in a climate chamber allowing for temperature stabilization in the range between +24 °C and −20 °C.
Two identical reducers were assessed, differing only in the lubricant used: Castrol TT-1 (lower base viscosity, formulation optimized for low temperatures) and Vigo RE-0 (higher base viscosity, formulation designed for higher loads). The aim was to compare their low-temperature behavior under as many identical measurement conditions as possible. The measurements were performed on reducers with serial numbers:
- 1411K6818Y – the Castrol TT-1 lubricant
- 1411K8829Y – the Vigo RE-0 lubricant
Both reducers were assessed without the seal on the input shaft to minimize the influence of the seal friction torque on the starting torque measured and to better represent the internal frictions of the reducer (gearing, bearings, lubricant distribution).
The basic reducers parameters at 20 °C (data taken from the measurements done by the manufacturer, i.e., SPINEA) were the following:
- hysteresis: 0.49–0.59 arcmin
- lost motion: 0.68–0.71 arcmin
The values above indicate a comparable mechanical condition of both samples before the start of the tests and reduce the likelihood that the observed differences in starting torque are caused by differences in the accuracy or clearances of the mechanism.
The measurements were taken in the following experimental setup:
- Drive: SIEMENS SIMODRIVE 611U with a 1FK6063-6AF71-1TH0-Z servo motor
- Torque sensor: BURSTER 8661-5020
- Data collector: HBM SPIDER8
- Climate chamber: controlled temperature range from −20 °C to +24 °C
- Load mode: no-load, i.e., primarily measured were the internal torque losses
- Input speed upon measuring the starting torque: 50 rpm
- Input speed range upon measuring the speed-dependent torque losses (viscous friction): 0–3000 rpm
- Starting test length: The start-up was evaluated during the first 3 output revolutions after motion actuation.
The above configuration enabled time-resolved recording of the torque curve during start-up (including overcoming static frictions) and steady-state operation, while in no-load mode the measured values mainly represent a combination of mechanical friction and hydrodynamic-viscous losses of lubricant in the reducer. (Figure 1).
2.2. Procedure for Measuring the Starting Torque And Viscous Friction
The starting torque was measured at five temperature levels, namely: +24 °C, +10 °C, 0 °C, –10 °C and –20 °C. The measuring followed the procedure below:
- The reducer was exposed to the required temperature for at least 60 minutes to ensure thermal stabilization of the lubricant and all internal components.
- After the temperature stabilized, the servo motor performed three output revolutions at a constant input speed of 50 rpm.
- During the entire starting cycle, the torque curve was continuously recorded over time.
- The starting torque was defined as the maximum torque value achieved during the first three output revolutions, which represent the transition from static to dynamic lubrication mode.
Procedure defined in the way above allows for capturing the combined effect of the lubricant’s viscous frictions, its ultimate sheer strength (τ0), internal resistance of the bearings, of the gears, and other mechanical losses prevalent at low temperatures and low revolutions. At the same time, this approach ensures the measurements are reproducible and the behavior of different lubricant types under identical conditions is comparable.
Viscous friction was measured in the range of input revolutions from 0 to 3000 rpm at four temperature levels: +10 °C, 0 °C, –10 °C and –20 °C. After the reducer was exposed to and reached the required temperature, the servomotor was made to continuously accelerate from zero speed to a maximum speed of 3000 rpm over 10 seconds. During the entire acceleration cycle, the input torque was continuously recorded as a function of speed. This procedure allows to capture the dynamic behavior of the lubricant at high shear rates and to separate viscous losses from the frictions dominating the start-up phase. Using the equation which allows to quantify the power intensity of the reducer operation at different temperatures and revolutions, the input power was subsequently derived from the measured torque values. The methodology defined in this way provides a consistent basis for comparing the viscous frictions of lubricants belonging to different viscosity classes and exhibiting different behavior at low temperatures.
Each measurement was done at least twice, with deviations in between not exceeding 5%. Such a low variability confirms the measuring system stability, repeatability of the experimental conditions and consistency of the data obtained. All measurements were performed by the same staff, minimizing the influence of the operator on the results and eliminating potential systemic errors related to differences in handling or setting of the measuring device. The outlined procedure ensures high reliability of the obtained data and allows for their relevant comparison between individual temperature levels and lubricant types.
4. Results and Discussion
The experimental results obtained are interpreted in terms of the lubricants‘ rheological properties, their dependence on temperature, and their influence on the power intensity of the reducer operation.
4.1. Starting Torque at Low Temperatures
4.1.1. Castrol TT-1
The reducer filled with the lubricant Castrol TT-1 showed stable and relatively low values of starting torque across the entire temperature range under investigation. At the temperature of +24 °C, the starting torque reached its maximum value of 0.20 Nm (Figure 2). With the temperature decreasing – all the way down to the lowest monitored temperature of −20 °C, the starting torque increased only gradually. Even at this temperature, the starting torque value remained below the limit of 0.30 Nm, which indicates only a moderate sensitivity of the system to a drop in temperature within the given range.
The measured values plotted in the chart in Figure 2 show that at room temperature, the lubricant has very low internal friction, which guarantees reliable start-up of the reducer and minimal power losses at the temperature investigated.
Only minimal deviations from the previous measurement can be observed in the record shown in Figure 3. The lubricant maintains good fluidity even at a slight drop in temperature.
Measuring at 0° C (Figure 4) confirmed stable behavior and low frictions also close to zero. The lubricant is suitable for cold environment applications, too.
Figure 4.
The course of the starting torque in the 1411K6818Y reducer (Castrol TT 1), CW direction, temperature of 0° C.
Figure 4.
The course of the starting torque in the 1411K6818Y reducer (Castrol TT 1), CW direction, temperature of 0° C.
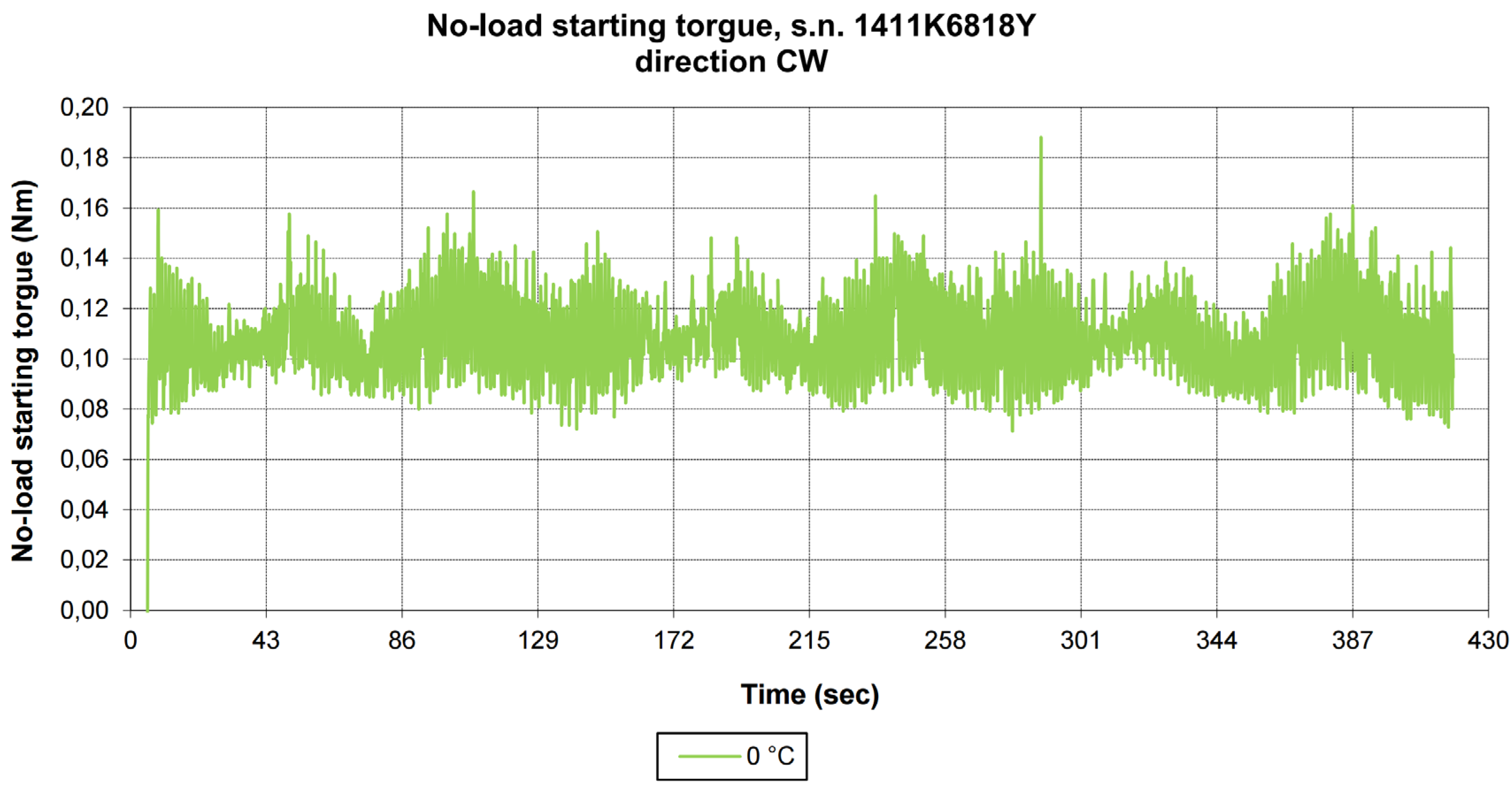
Figure 5.
The course of the starting torque in the 1411K6818Y reducer (Castrol TT 1), CW direction, temperature of –10° C.
Figure 5.
The course of the starting torque in the 1411K6818Y reducer (Castrol TT 1), CW direction, temperature of –10° C.
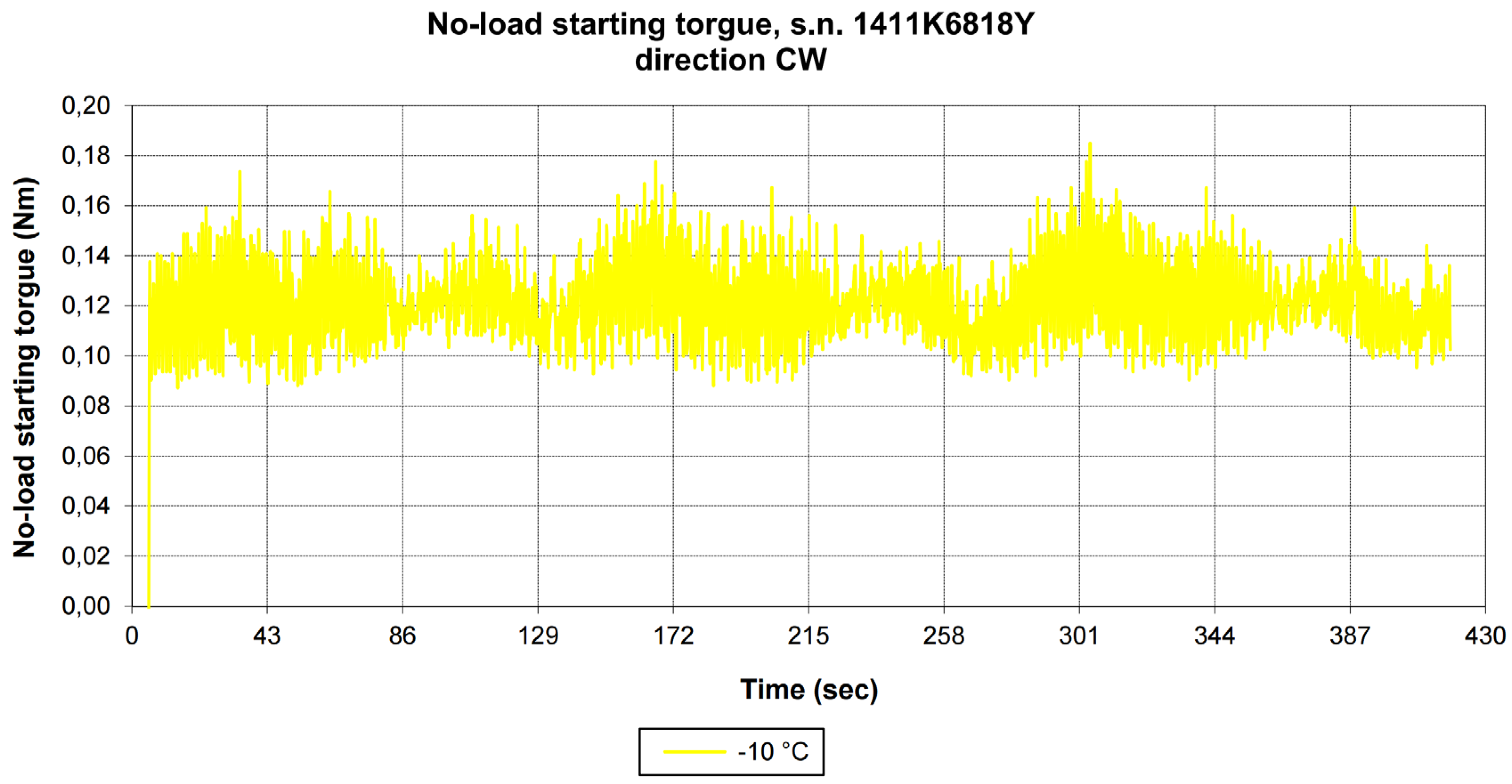
Measurements at -10° C have shown only the slightest increase. The lubricant ensures reliable start-up in the frost as well.
Even in extreme cold, the measured starting torque value remains low, confirming the excellent low-temperature properties of the lubricant. (Figure 6). The measurement result confirms that Castrol TT-1 maintains good fluidity even at deep sub-zero temperatures, which is consistent with its low base viscosity and the presence of low-temperature additives. Predominant component of the starting torque in this lubricant is largely viscous, while the ultimate sheer strength (τ0) remains low even at cold as great as –20 °C.
4.1.2. Vigo RE-0
The lubricant Vigo RE-0 exhibits a markedly different behavior. At +24 °C, the starting torque was about 0.21 Nm, which is comparable to TT-1 (Figure 7). However, with the temperature dropping, the frictions rise sharply.
The Vigo RE-0 lubricant demonstrates a markedly deteriorated ability to start-up as soon as the temperature drops to +10 °C. The oscillation (the variation between peaks and troughs) increased slightly at +10 °C already, indicating higher non-linearity/unevenness of frictions during start-up. Higher starting torque peaks and higher base level mean higher load on the drive and higher power consumption during start-up (Figure 8). The trend suggests that further temperature reduction will lead to a sharp increase in starting torque.
Figure 9 shows the recorded measurement of the investigated lubricant at 0 °C. After a short rise at the beginning, the curve stabilizes at a high level with a slight oscillation. Unlike in measurements at +24 °C (≈ 0.21 Nm) and +10 °C (≈ 0.28–0.29 Nm) the increase is significant – almost +60% compared to +10 °C. The oscillation of the curve is smaller than that at +24 °C, but the entire curve has shifted to a higher level. At 0 °C, Vigo RE-0 lubricant shows a significantly increased starting torque, which means increased viscous frictions and a higher ultimate shear strength of the lubricant. The power demand of starting up is already very high, which can be a problem for drives with limited torque.
Figure 10 shows the recorded course of the starting torque at –10 °C. The peaks are reached at about 0.58 – 0.60 Nm. The course is stable, but overall, it has shifted to high values, which represent significantly higher viscous frictions already at -10 °C.
Figure 11 shows very high values of the starting torque measured. After the initial peak, the curve remains at ~1.0–1.1 Nm with a slight oscillation. The start-up is power intense and requires the drive torque to be significantly higher than is the case at lower temperatures.
The increase in measured starting torque is an order of magnitude higher than with TT-1 and indicates a significant solidification of the lubricant at low temperatures. At -20 °C, the starting torque is approximately 3.5 times higher than in the case of TT-1. In this case, the limit component of the starting torque predominates, which corresponds to the Bingham model, according to which the growth of τ0 at low temperatures results in sharp increase in friction upon start-up.
4.1.3. Comparison of lubricants
The experiment results unequivocally show that:
- Castrol TT 1 is suitable for low temperature applications because it maintains low viscosity even at –20 °C.
- Vigo RE 0 is not optimized for low temperatures. Its viscosity and sheer strength rise sharply, which leads to extremely high starting torque.
- In terms of start-up reliability, the difference between the lubricants is fundamental. At –20 °C, a reducer filled with RE 0 may be practically unable to start without overloading the drive.
With the temperature dropping, the lubricant viscosity increases exponentially (Arrhenius dependence). The lubricant with a higher base viscosity (RE 0) solidifies dramatically at low temperatures, which increases motion resistance. TT 1 has low base viscosity and low-temperature additives, so it retains its fluidity even at -20 °C. According to the Bingham model, the starting torque contains the limit component that prevails at start-up in the cold. With RE 0, τ0 rises sharply, causing an extremely high starting torque. TT 1 has low τ0 also in the frost, which is why it starts easily. At –20 °C, the performance loss of RE-0 is four times greater than that of TT-1 (1.4–1.6 kW vs. 0.35–0.40 kW, respectively). That translates into greater requirements of the drive and a risk of its overload.
4.2. Viscous Friction and Power Intensity at Low Temperatures
In addition to the starting torque, an important parameter in the operation of precision reducers is also viscous friction during the operation, which directly affects the power efficiency of the mechanism. This phenomenon is especially significant at low temperatures when the viscosity of the lubricant markedly increases. The experiment investigated the dependence of the input torque and input power on the speed in the range of 0–3000 rpm at four temperature levels (+10 °C, 0 °C, −10 °C, −20 °C) in the no-load mode.
The measurements were conducted on two identical TS 140 115 E P19 0583 reducers, with the only difference being the lubricant used:
- Castrol TT 1 (lower base viscosity, optimized for low temperatures) – reducer s.n. 1411K6818Y.
- Vigo RE 0 (higher base viscosity, designated for greater loads) – reducer s.n. 1411K8829Y.
4.2.1. Castrol TT-1
The reducer was exposed to and reached the required temperature, and it subsequently accelerated from zero to 3000 rpm over 10 seconds. During the acceleration cycle, the input torque and the derived input power were continuously recorded. Figure 12 shows dependence of the input torque on revolutions at different temperatures.
At +10 °C, the torque values reach approximately 0.59 Nm at 3000 rpm. At −20 °C, the torque increases to ~1.06 Nm. Measurements confirm the effect of temperature drop on viscous friction and power consumption of the reducer operation.
Figure 13 shows dependence of the input torque at different temperatures in the case of the reducer filled with Castrol TT 1. It follows from the chart that the output grows with the revolutions and a drop in temperature. At +10 °C, the output at 3000 rpm reaches about 0.19 kW, while at −20 °C, it increases to about 0.33–0.34 kW. This hike represents increase in power intensity by approximately 75% compared to at +10 °C. The trend confirms that a drop in temperature significantly increases the lubricant’s viscous frictions, which is manifested in higher torque and greater power consumption of the reducer operation.
4.2.2. Vigo RE-0
The reducer filled with Vigo RE-0 lubricant demonstrates a markedly different behavior compared to Castrol TT-1, especially at low temperatures. The measurements were conducted in an identical setup – acceleration from 0 to 3000 rpm over 10 seconds, torque recording, and no-load mode power calculation. Figure 14 shows dependence of input torque on revolutions at four temperature levels (+10 °C, 0 °C, −10 °C, −20 °C).
The trend shown in the chart shows an increase in viscous frictions with decreasing temperature – at −20 °C, the torque is more than three times that at +10 °C.
Figure 15 shows the dependence of input power on revolutions. Power intensity of the reducer filled with the lubricant Vigo RE 0 at −20 °C is thus 2.2 times greater than is the power intensity at +10 °C.
4.2.3. Comparison of the Lubricants
The results clearly confirm that Vigo RE 0 is not suitable for applications designed for extremely cold environments. The high base viscosity of the lubricant causes a dramatic increase in viscous friction and power losses when the temperature drops. At −20 °C, the torque is almost 7 Nm, which represents an enormous load on the drive and the risk of overload. The power intensity of the operation exceeds 1.5 kW, which is approximately four times greater compared to Castrol TT 1 (≈0.33 kW). This difference highlights the critical importance of the correct choice of lubricant for reliable start-up and efficient operation of the reducer in low-temperature conditions.
5. Discussion and practical recommendations
Based on the experimental results, the following recommendations can be formulated for the operation of precision cycloidal reducers in low-temperature environments:
- Choice of lubricant according to operating conditions:
- In applications designated for extremely cold environments (−20 °C and below), it is essential to use lubricants with low base viscosity and low-temperature additives that retain fluidity even at sub-zero temperatures. (e.g., Castrol TT-1).
- High viscosity lubricants (e.g., Vigo RE-0) are only suitable for high load applications at normal temperatures, not for arctic conditions.
- Power loss reduction to a minimum:
- The use of low-viscosity lubricants significantly reduces starting torque and power losses, thereby reducing the risk of drive overload and increasing the power efficiency of the system. If lubricants with higher viscosity need to be used, we recommend preheating the reducer before starting.
- Design modifications:
- Consider integrating local lubricant heating or thermal management in drives designed for low-temperature environments. Optimize reducer seals and internal backlash to minimize mechanical resistance at low temperatures.
- Operating procedures:
- Before starting the device in extreme conditions, we recommend checking the temperature of the lubricant and, if necessary, bringing its temperature to a value that will allow a safe start-up. In applications with limited access to maintenance, it is advisable to choose lubricants with high stability and low tendency to solidify.
- Monitoring and troubleshooting:
- Implement torque and temperature sensors for early detection of increased frictions that may signal unsuitable lubricant or a risk of failure to start-up.
5. Conclusions
The aim of the work was to experimentally assess the influence of low temperature and lubricant choice on the starting torque, viscous friction (speed-dependent torque losses), and power consumption of the TwinSpin TS 140-115-E-P19-0583 precision cycloidal reducer operating in the no-load mode. Two identical reducers were compared, differing only in the lubricant used: Castrol TT-1 (s.n. 1411K6818Y) and Vigo RE-0 (s.n. 1411K8829Y).
Experimental results have unequivocally shown that Castrol TT-1 retains favorable rheological properties even at sub-zero temperatures and ensures reliable gear start-up. The starting torque of TT-1 increased only slightly with decreasing temperature and even at −20 °C remained below approximately 0.30 Nm, which is a value highly beneficial in terms of drive requirements.
On the contrary, Vigo RE-0 showed a significant deterioration in low-temperature behavior – with a drop in temperature, there was a sharp increase in starting torque, while at −20 °C the starting torque was approximately at the level of 1.0–1.1 Nm. This means a significantly higher requirement of the drive torque and, in practice, an increased risk of problems with starting up or with overload.
The viscous friction measurements confirmed the expected trend: with the temperature decreasing, the viscous frictions increase, which is reflected in higher input torque and higher input power, especially at higher revolutions. In the case of the reducer with TT-1, the input torque at 3000 rpm was approximately 0.59 Nm at +10 °C and approximately 1.06 Nm at −20 °C; this corresponded to an increase in power from approximately 0.19 kW to ~0.33–0.34 kW.
In the case of Vigo RE-0, viscous friction and power losses were significantly higher at low temperatures, confirming that a lubricant with a higher base viscosity may not be suitable for high-speed and power-efficient operation in “arctic” conditions. The results thus highlight the critical importance of the correct lubricant choice for applications where reliable starting and low losses are required in the temperature ranging from about 0 °C to −20 °C.
Author Contributions
Conceptualization, D.P. and P.B.; methodology, M.K. and D.P.; software, P.B.; validation, D.P., M.K. and P.B.; formal analysis, D.P. and M.K.; investigation, D.P.; resources, D.P.; data curation, M.K. and P.B.; writing—original draft preparation, D.P. and M.K.; writing—review and editing, P.B.; visualization, P.B.; supervision, D.P.; project administration, P.B.; funding acquisition, P.B. All authors have read and agreed to the published version of the manuscript.
Data Availability Statement
The data presented in this study are available on request from the corresponding author. The data are not publicly available due to restrictions on funding sources.
Acknowledgments
The article was prepared with the support of the Ministry of Education, Research, Development and Youth of the Slovak Republic through the KEGA grant No. 009TUKE-4/2024, by the Slovak Research and Development Agency under Contract No. APVV-24-0470, and by the European Union – NextGenerationEU through the Recovery and Resilience Plan for Slovakia under Project No. 09I05-03-V02-00042.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Liu, S.; Lv, J.; Liu, C. The Effect of Lubricant’s Viscosity on Reducing the Frictional-Induced Fluctuation on the Onset of Friction. Lubricants 2024, 12, 136. [CrossRef]
- Kumar, S.; Kumar, A.; Kumar, A.; Kumar, A.; Choudhari, A.; Gupta, A.K.; Faisal, S. State of the Art in Lubricants for Extreme Cold Weather. In Performance Characterization of Lubricants; Kumar, A.; Kumar, A.; Kumar, A., Eds.; CRC Press: Boca Raton, FL, USA, 2024. [CrossRef]
- Lampaert, S.G.E.; van Ostayen, R.A.J. Lubrication Theory for Bingham Plastics. Tribol. Int. 2020, 147, 106160. [CrossRef]
- Khonsari, M.; Booser, E.R. Low Temperature and Viscosity Limits. Machinery Lubrication. Available online: https://www.machinerylubrication.com/Read/1014/low-temperature-viscosity-limits (accessed on 18 December 2025).
- Twin Specialties Corp. Lubricants for Cold Weather. Available online: https://www.twinoils.com/news/lubricants-for-cold-weather/ (accessed on 18 December 2025).
- Richard. How Cold Temperatures Affect Lubricants. Oil Store, 2 October 2024. Available online: https://www.oil-store.co.uk/blog/how-cold-temperatures-affect-lubricants/ (accessed on 18 December 2025).
- Mirza, M.; Yilmaz, M.; Thieme, E.; Lohner, T.; Venner, C.H. Drop-On-Demand Lubrication of Gears: A Feasibility Study. Front. Mech. Eng. 2021, 7, 746407. [CrossRef]
- Farrenkopf, F.; Schwarz, A.; Lohner, T.; Stahl, K. Analysis of a Low-Loss Gear Geometry Using a Thermal Elastohydrodynamic Simulation Including Mixed Lubrication. Lubricants 2022, 10, 200. [CrossRef]
- Vasić, M.; Blagojević, M.; Banić, M.; Maccioni, L.; Concli, F. Theoretical and Experimental Investigation of the Thermal Stability of a Cycloid Speed Reducer. Lubricants 2025, 13, 70. [CrossRef]
- Castrol Limited. Castrol Optitemp TT 1 + TT 1 EP: Low-Temperature Greases with MICROFLUX TRANS™, the Load-Active Additive Combination; Product Data Sheet, Version 1; Castrol Limited: Swindon, UK, 15 June 2010. Available online: https://msdspds.castrol.com/bpglis/FusionPDS.nsf/Files/83CEE25370180A2D8025779600301E39/$File/454590_XI_en.pdf (accessed on 18 December 2025).
- Nabtesco Motion Control, Inc. Vigo Grease (VIGO GREASE REO). Available online: https://www.nabtescoprecision.com/product/vigo-grease/ (accessed on 18 December 2025).
- Marques, P.M.T.; Fernandes, C.M.C.G.; Martins, R.C.; Seabra, J.H.O. Power Losses at Low Speed in a Gearbox Lubricated with Wind Turbine Gear Oils with Special Focus on Churning Losses. Tribol. Int. 2013, 62, 186–197. [CrossRef]
- Shore, J.F.; Kolekar, A.S.; Ren, N.; Kadiric, A. An Investigation into the Influence of Viscosity on Gear Churning Losses by Considering the Effective Immersion Depth. Tribol. Trans. 2023, 66, 906–919. [CrossRef]
- Andersson, M. Churning Losses and Efficiency in Gearboxes. Licentiate Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2014; TRITA MMK 2014:11.
- Albers, P. A Study to Oil Churning Losses in a Gearbox. DCT Rapporten 2004.035; Technische Universiteit Eindhoven: Eindhoven, The Netherlands, 2004.
- Fernandes, C.M.C.G.; Martins, R.C.; Seabra, J.H.O. Friction Torque of Cylindrical Roller Thrust Bearings Lubricated with Wind Turbine Gear Oils. Tribol. Int. 2013, 59, 121–128. [CrossRef]
- Cousseau, T.; Graça, B.; Campos, A.; Seabra, J. Experimental Measuring Procedure for the Friction Torque in Rolling Bearings. Lubr. Sci. 2010, 22, 133–147. [CrossRef]
- Wikström, V.; Höglund, E. Starting and Steady-State Friction Torque of Grease-Lubricated Rolling Element Bearings at Low Temperatures—Part I: A Parameter Study. Tribol. Trans. 1996, 39, 517–526. [CrossRef]
- Cyriac, F.; Lugt, P.M.; Bosman, R. Yield Stress and Low-Temperature Start-Up Torque of Lubricating Greases. Tribol. Lett. 2016, 63, 6. [CrossRef]
- Cojocaru, D.; Ianuș, G.; Cârlescu, V.; Chiriac, B.; Olaru, D. Friction Torque in Miniature Ball Bearings. Lubricants 2025, 13, 12. [CrossRef]
- Jia, X.; Guo, F.; Huang, L.; Salant, R.F.; Wang, Y. Parameter Analysis of the Radial Lip Seal by Orthogonal Array Method. Tribol. Int. 2013, 64, 96–102. [CrossRef]
- Salant, R.F.; Rocke, A.H. Hydrodynamic Analysis of the Flow in a Rotary Lip Seal Using Flow Factors. J. Tribol. 2004, 126, 156–161. [CrossRef]
- Nomikos, P.; Rahmani, R.; Morris, N.; Rahnejat, H. Measurement and Prediction of Thermal Performance of Automotive Transmission Radial Lip Seals. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2023 (online first). [CrossRef]
- Romanik, G. Minimisation of Friction Resistance of Elastomeric Lip Seals on Rotating Shafts. Lubricants 2024, 12, 103. [CrossRef]
- Johnson, R.L.; Ludwig, L.P.; Strom, T.N. Torque and Leakage Rates of Various Lubricated Lip Seal Designs at a Peripheral Velocity of 120 Feet per Second. NASA Technical Note NASA TN D 5411; NASA Lewis Research Center: Cleveland, OH, USA, 1969.
- ASTM International. ASTM D1478 20: Standard Test Method for Low-Temperature Torque of Ball Bearing Grease; ASTM International: West Conshohocken, PA, USA, 2020. Available online: (ASTM Standard detail page) (accessed on 19 December 2025).
- Maccioni, L.; Mastrone, M.N.; Concli, F. Computational Studies on Cycloidal Gearboxes: A Systematic Literature Review. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1038, 012006. [CrossRef]
Figure 1.
Experimental setup of the TwinSpin TS 140-115-E-P19-0583 cycloidal reducer in the climate chamber.
Figure 1.
Experimental setup of the TwinSpin TS 140-115-E-P19-0583 cycloidal reducer in the climate chamber.

Figure 2.
The course of the starting torque in the 1411K6818Y reducer (Castrol TT-1), Clockwise direction (CW), temperature of +24 °C.
Figure 2.
The course of the starting torque in the 1411K6818Y reducer (Castrol TT-1), Clockwise direction (CW), temperature of +24 °C.
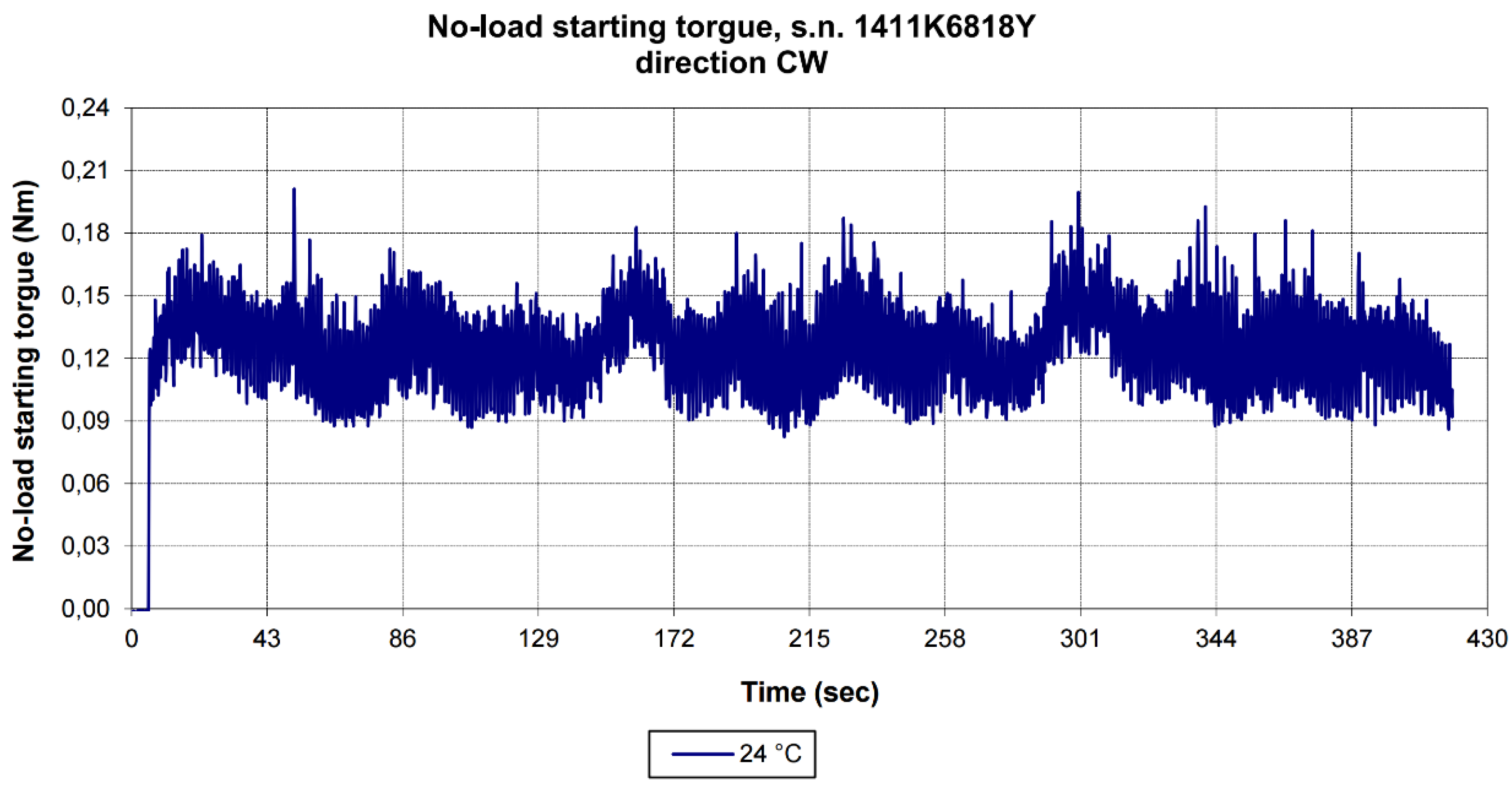
Figure 3.
The course of the starting torque in the 1411K6818Y reducer (Castrol TT 1), CW direction, temperature of +10° C.
Figure 3.
The course of the starting torque in the 1411K6818Y reducer (Castrol TT 1), CW direction, temperature of +10° C.
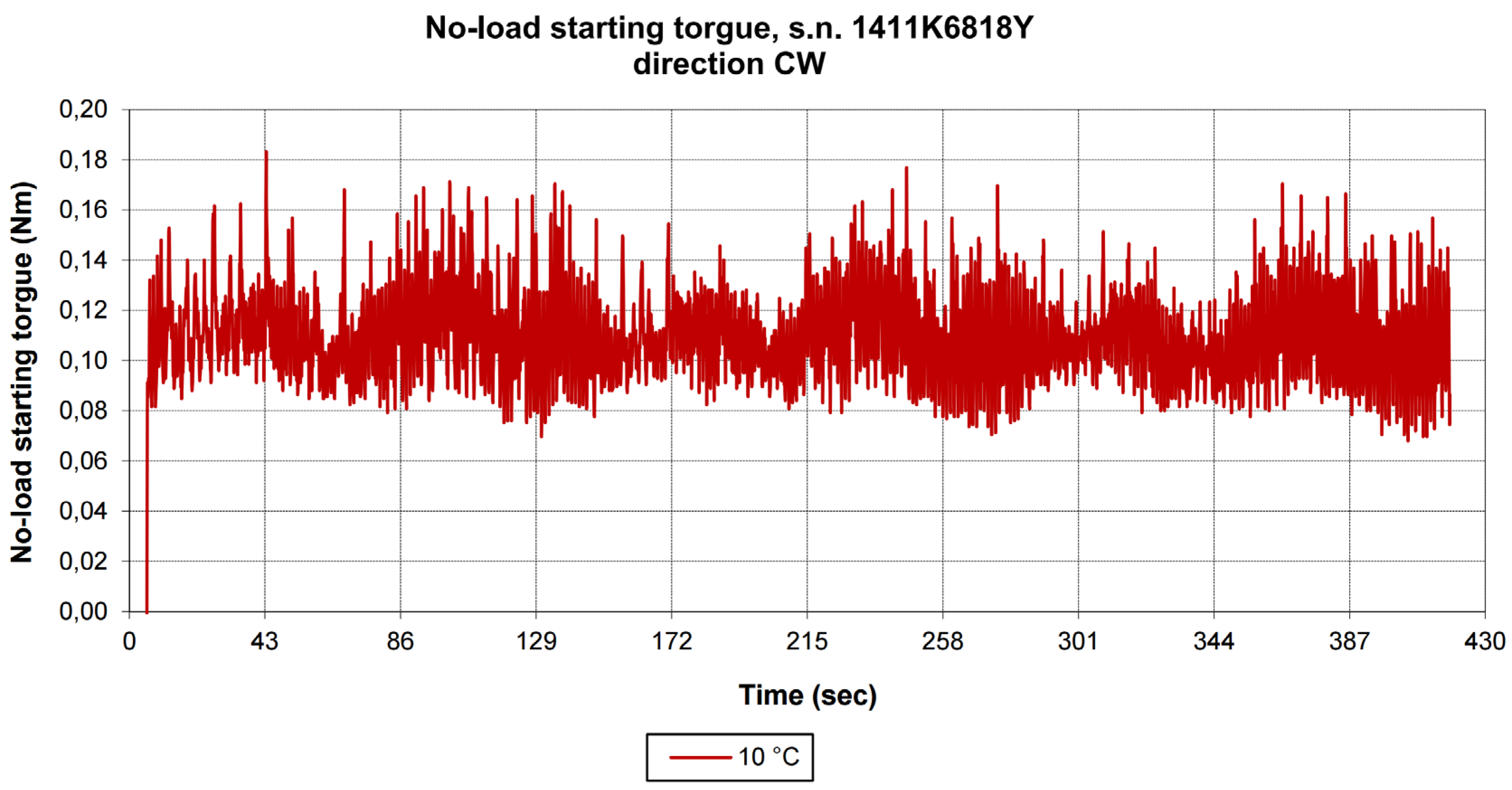
Figure 6.
The course of the starting torque in the 1411K6818Y reducer (Castrol TT 1), CW direction, temperature of –20° C.
Figure 6.
The course of the starting torque in the 1411K6818Y reducer (Castrol TT 1), CW direction, temperature of –20° C.
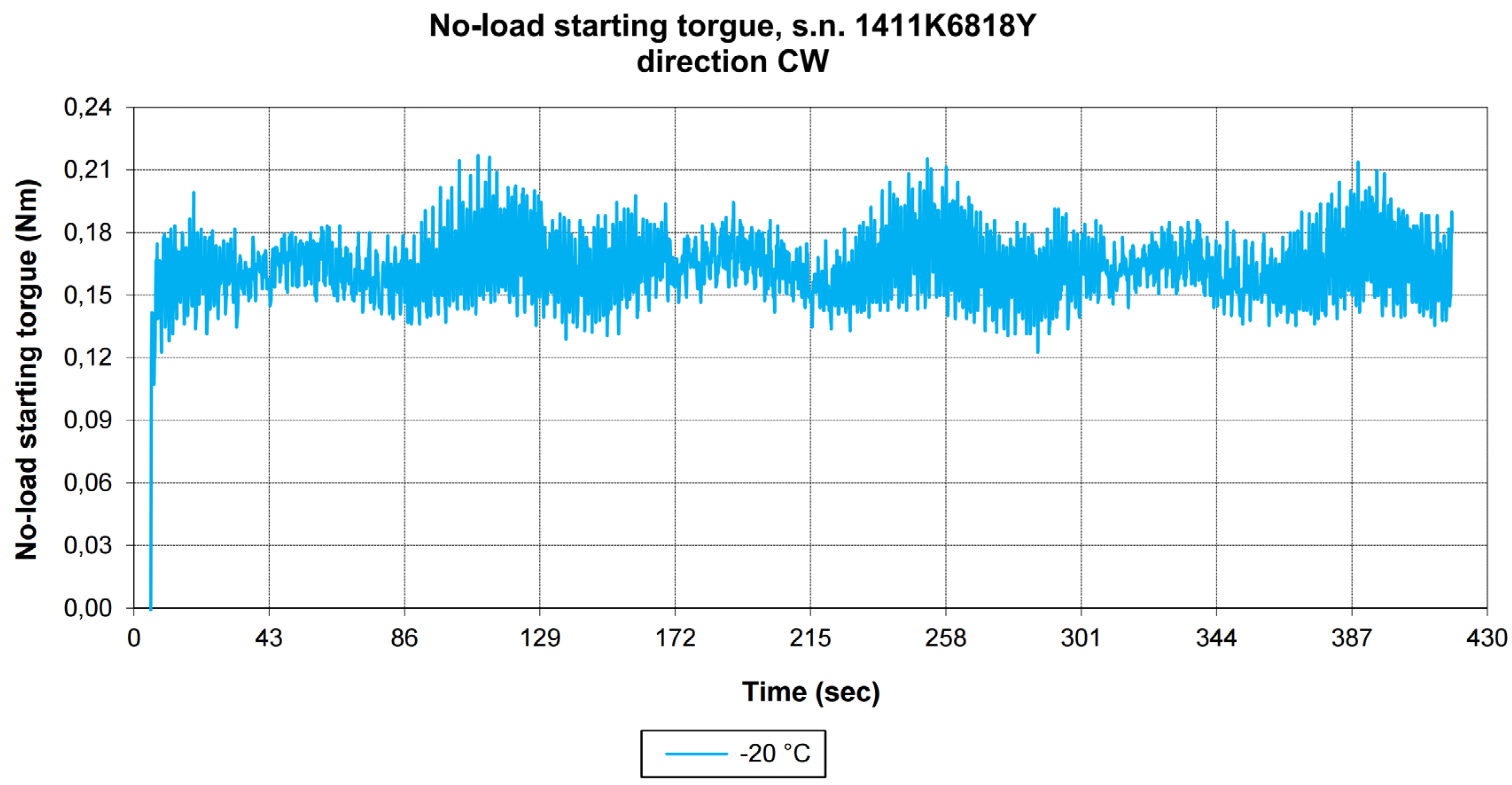
Figure 7.
The course of the starting torque in the 1411K8829Y reducer (Vigo RE-0), CW direction, temperature of +24 °C.
Figure 7.
The course of the starting torque in the 1411K8829Y reducer (Vigo RE-0), CW direction, temperature of +24 °C.
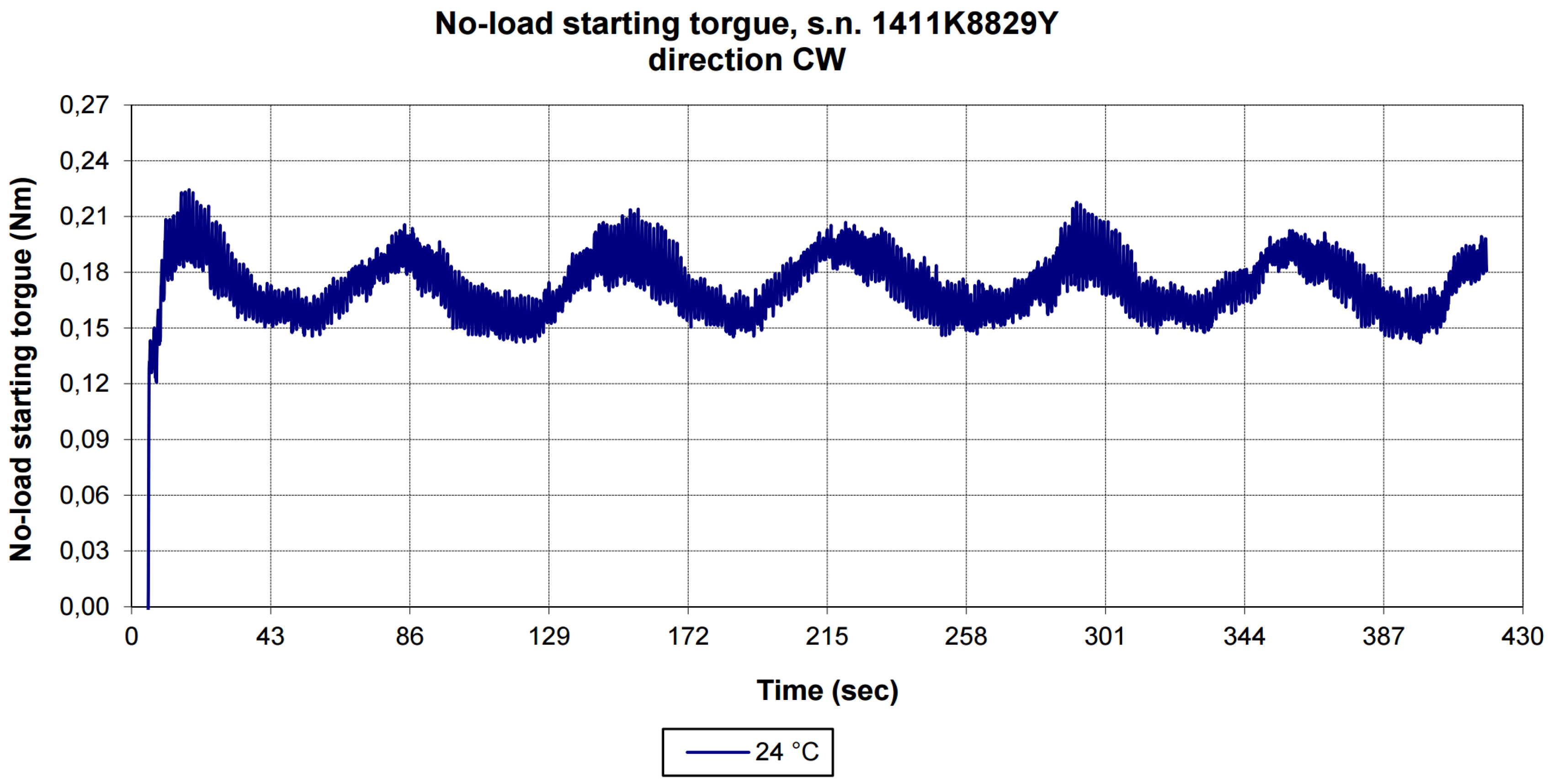
Figure 8.
The course of the starting torque in the 1411K8829Y (Vigo RE-0) reducer, CW direction, temperature of +10 °C.
Figure 8.
The course of the starting torque in the 1411K8829Y (Vigo RE-0) reducer, CW direction, temperature of +10 °C.
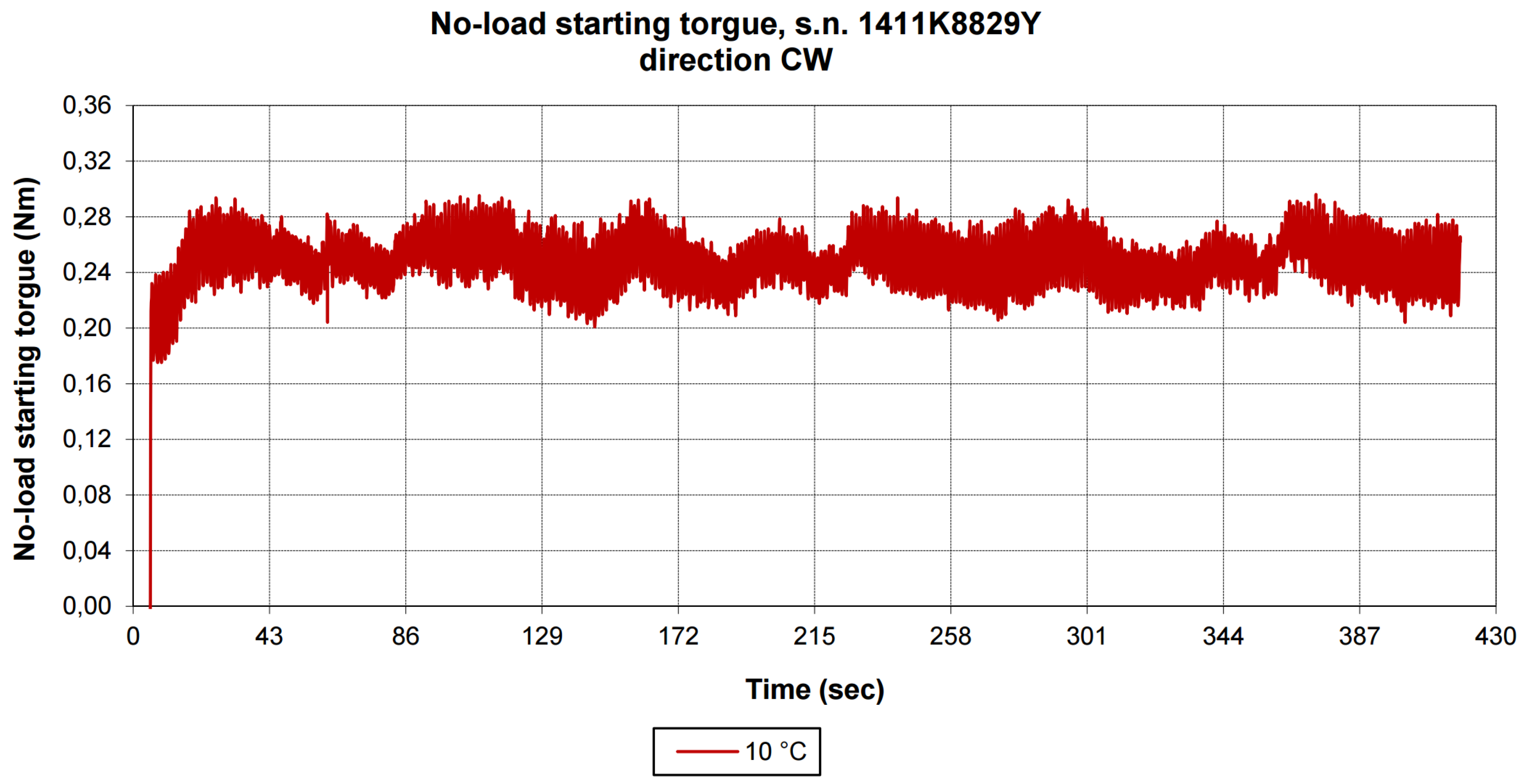
Figure 9.
The course of the starting torque in the 1411K8829Y (Vigo RE-0) reducer, CW direction, temperature of 0 °C.
Figure 9.
The course of the starting torque in the 1411K8829Y (Vigo RE-0) reducer, CW direction, temperature of 0 °C.
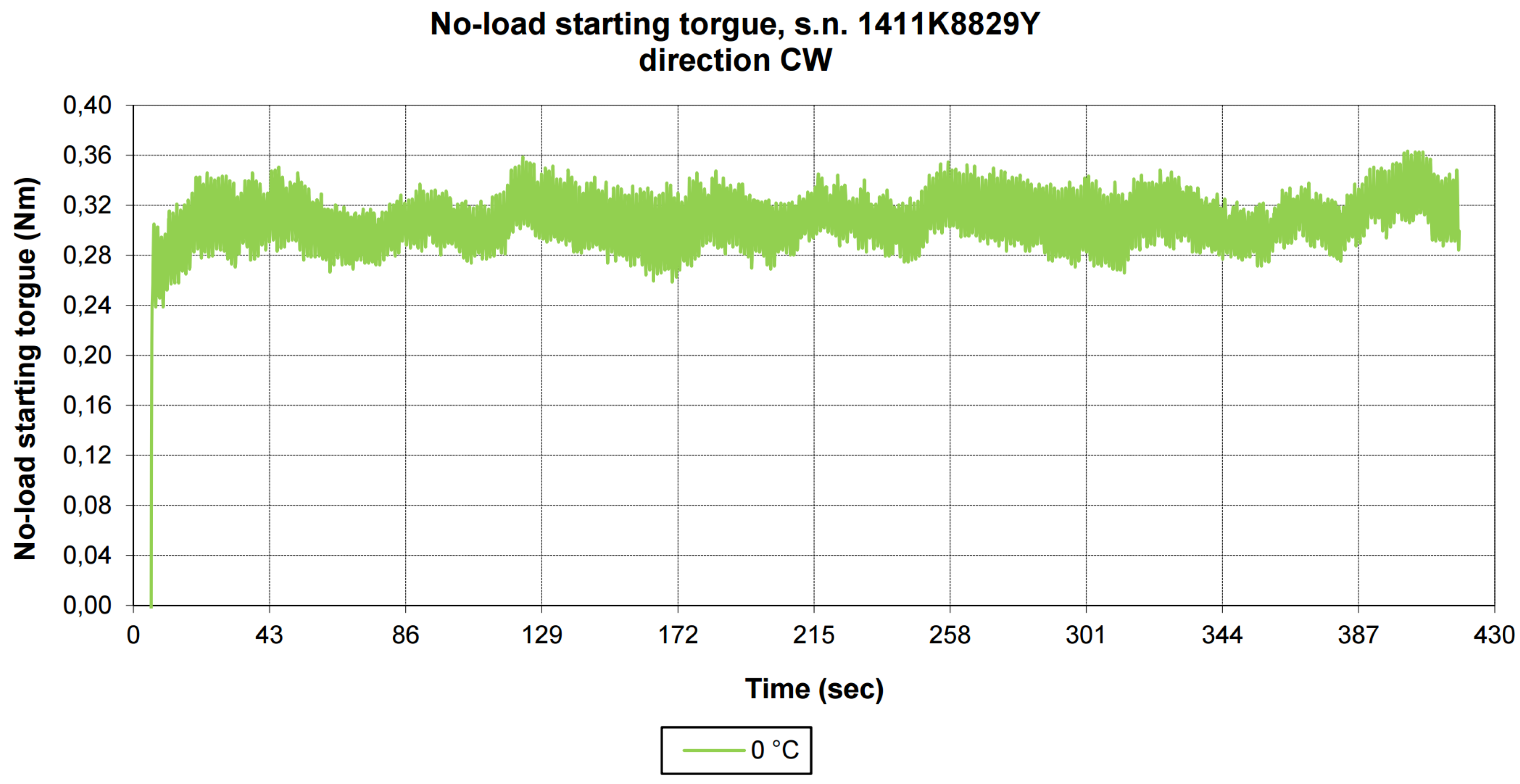
Figure 10.
The course of the starting torque in the 1411K8829Y reducer (Vigo RE-0), CW direction, temperature of –10 °C.
Figure 10.
The course of the starting torque in the 1411K8829Y reducer (Vigo RE-0), CW direction, temperature of –10 °C.
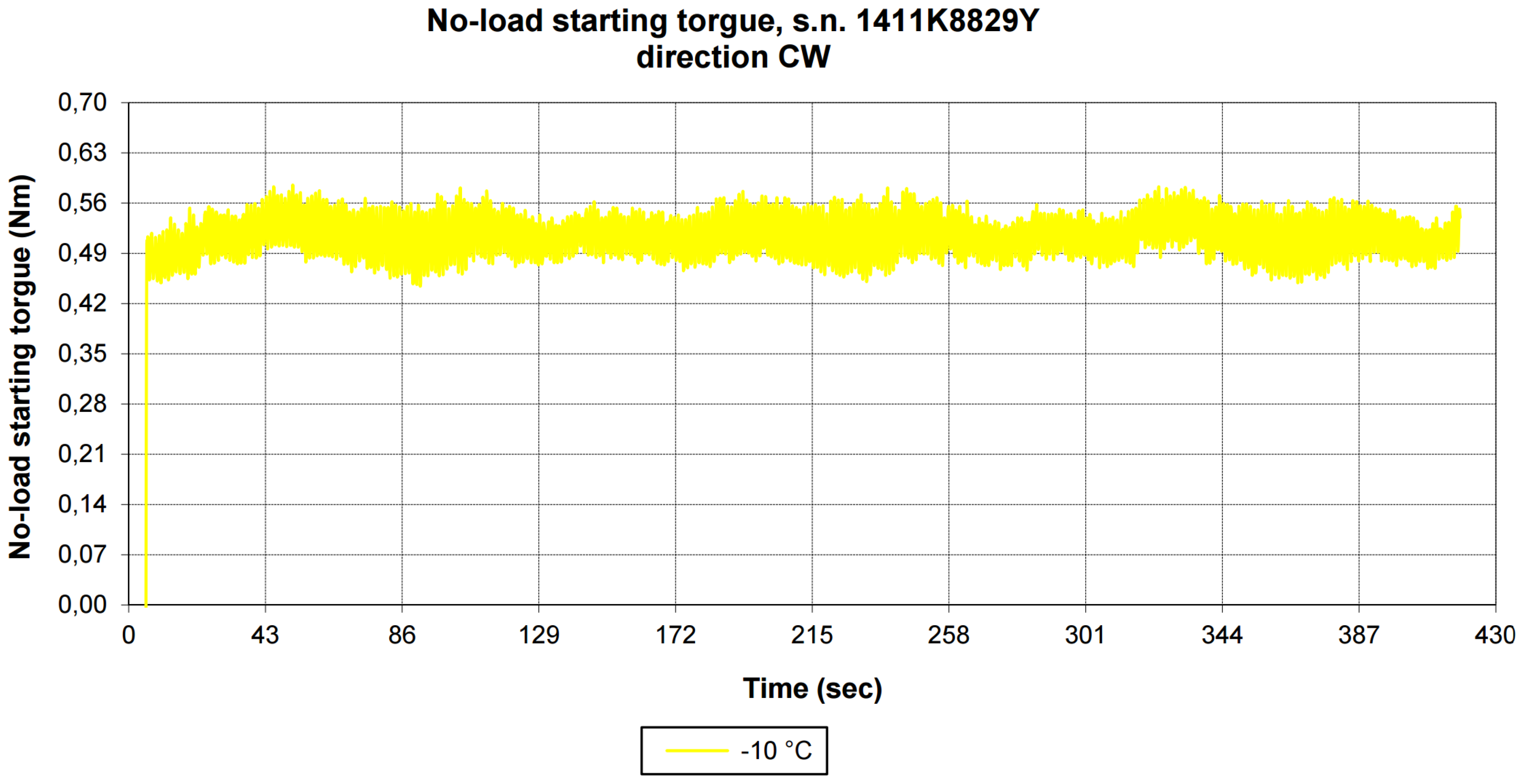
Figure 11.
The course of the starting torque in the 1411K8829Y reducer (Vigo RE 0), CW direction, temperature of –20 °C.
Figure 11.
The course of the starting torque in the 1411K8829Y reducer (Vigo RE 0), CW direction, temperature of –20 °C.
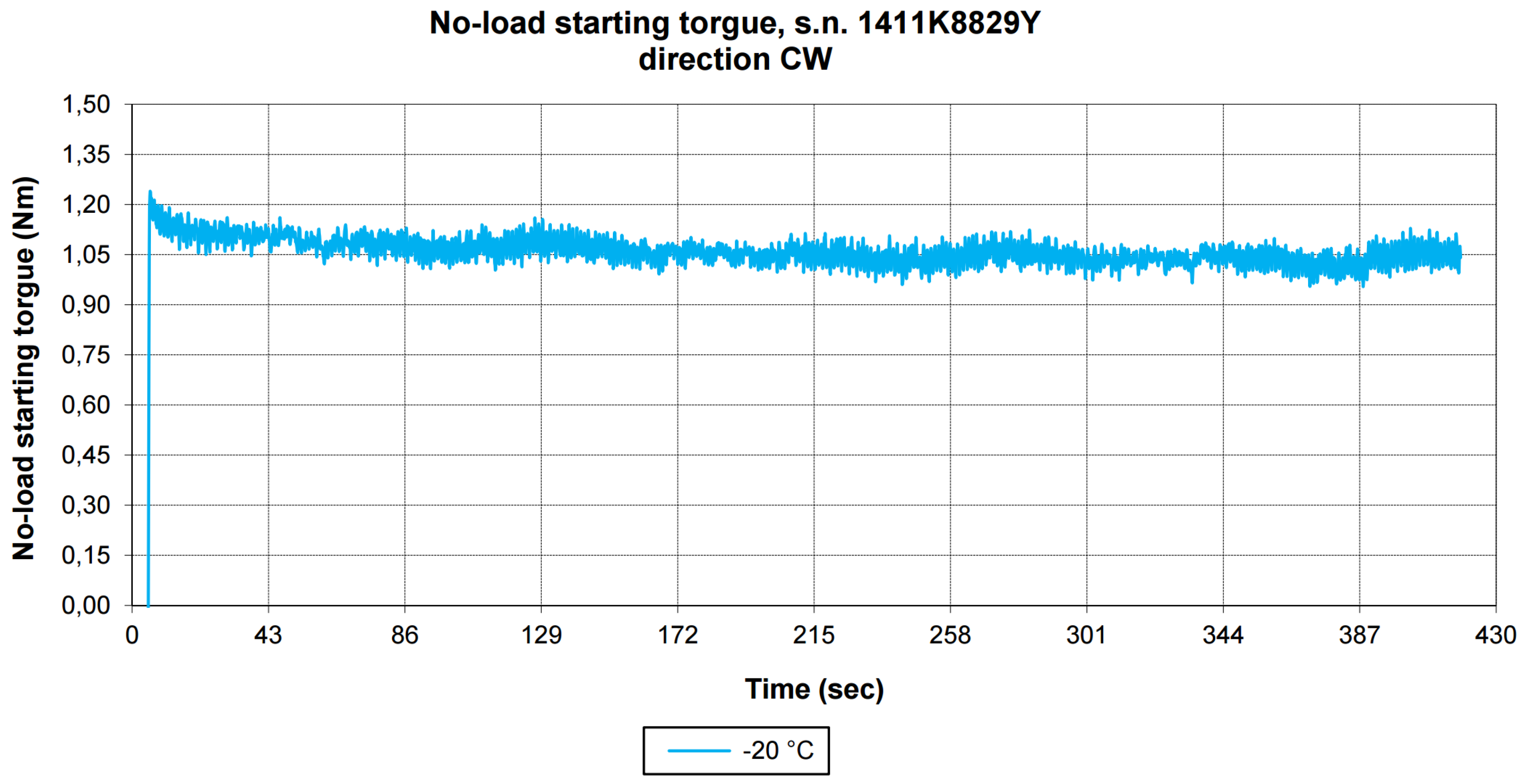
Figure 12.
Dependence of input torque on revolutions at different temperatures (Castrol TT-1, reducer 1411K6818Y).
Figure 12.
Dependence of input torque on revolutions at different temperatures (Castrol TT-1, reducer 1411K6818Y).
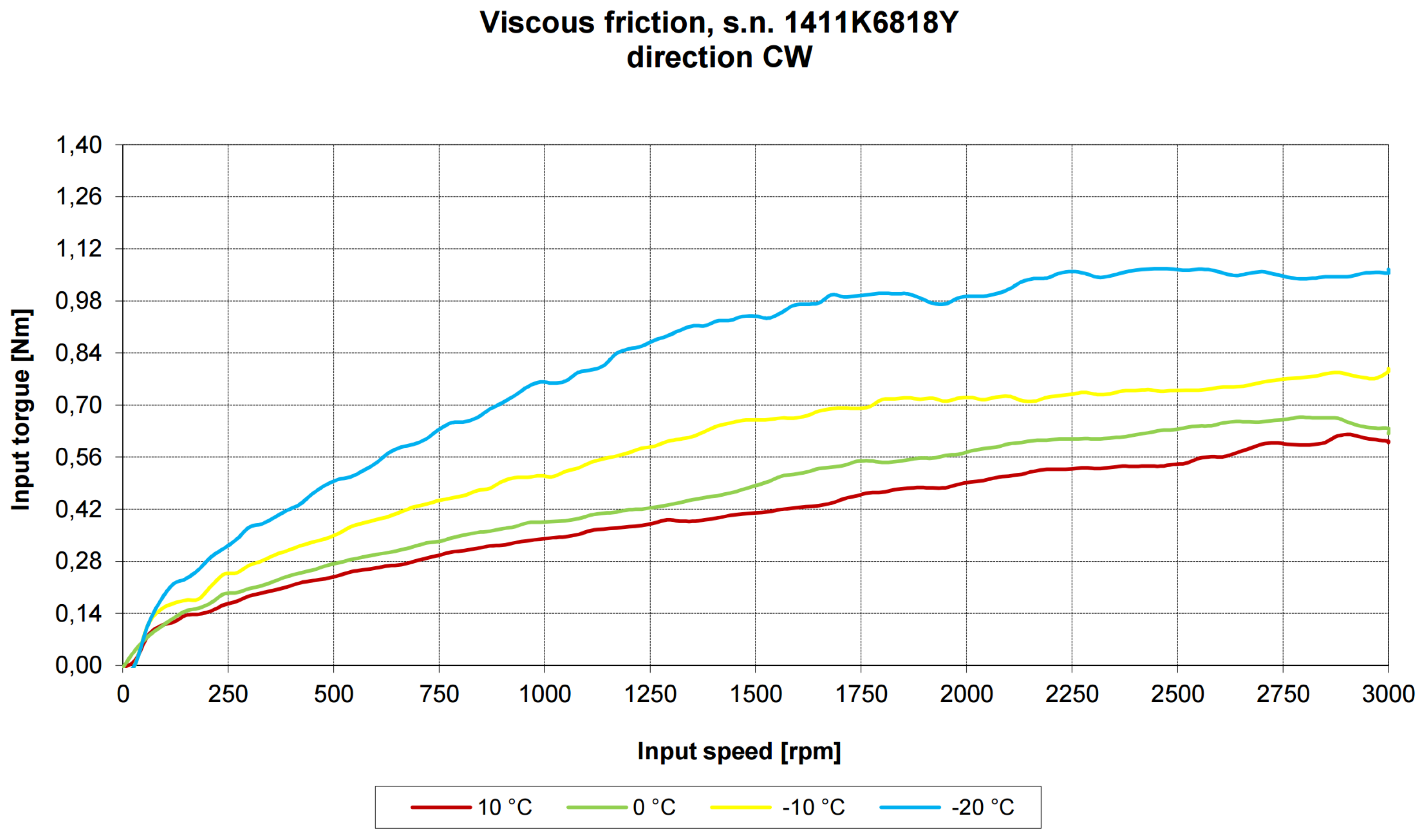
Figure 13.
Dependence of input power on revolutions at different temperatures (Castrol TT-1).
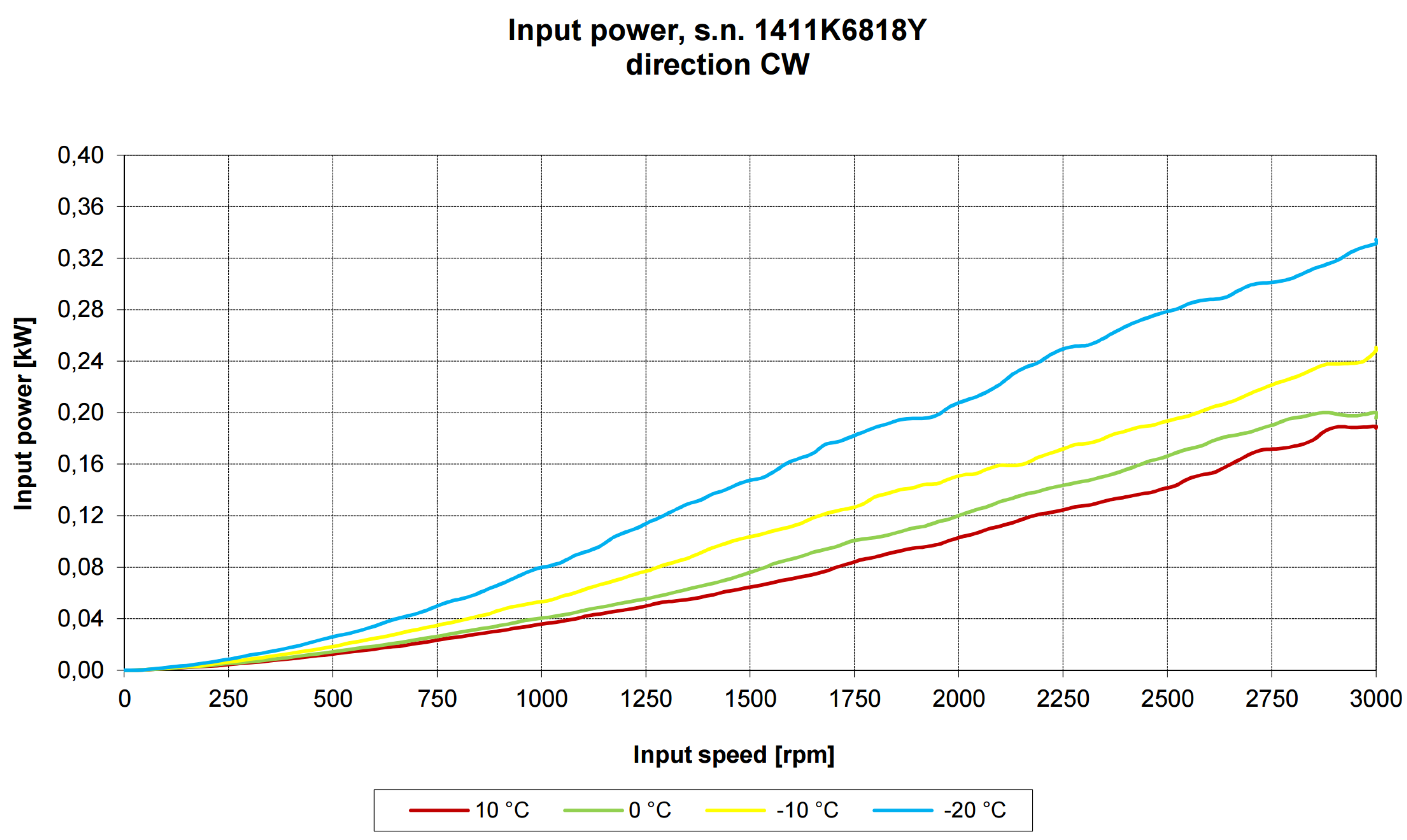
Figure 14.
Dependence of input power on revolutions at different temperatures (Vigo RE-0, reducer 1411K8829Y).
Figure 14.
Dependence of input power on revolutions at different temperatures (Vigo RE-0, reducer 1411K8829Y).
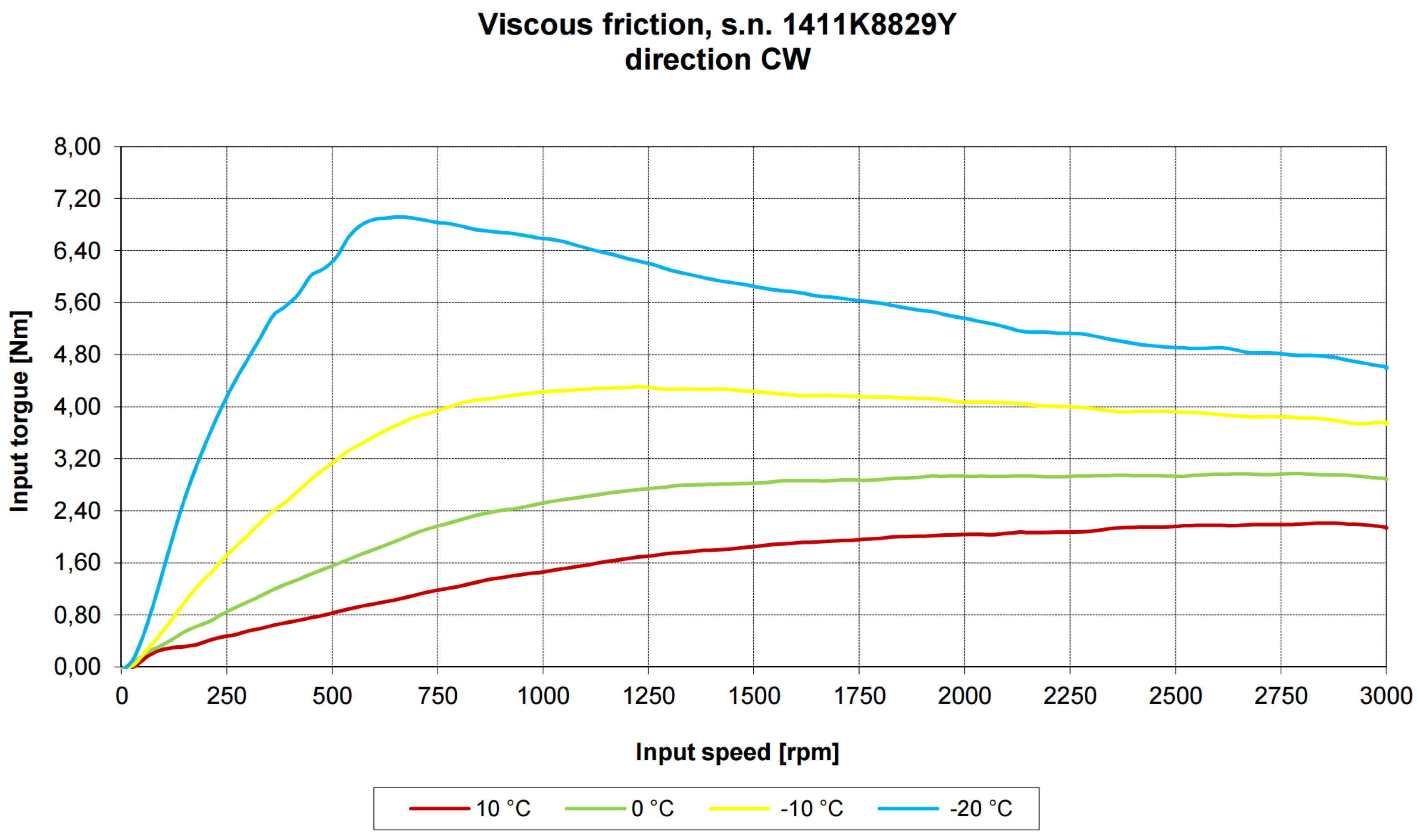
Figure 15.
Dependence of input power on revolutions at different temperatures (Vigo RE-0, reducer 1411K8829Y).
Figure 15.
Dependence of input power on revolutions at different temperatures (Vigo RE-0, reducer 1411K8829Y).
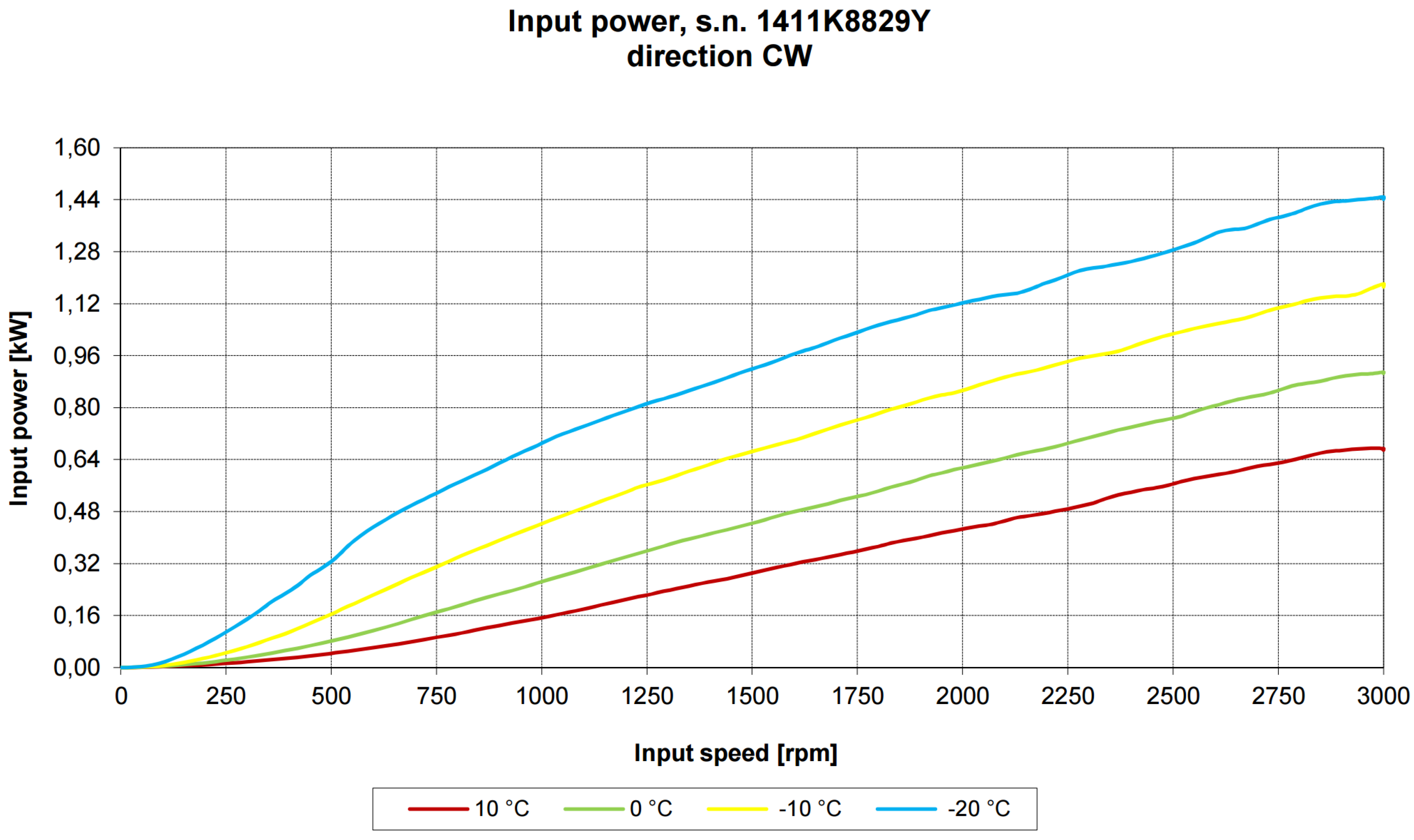

Table 1.
Comparison of the investigated parameters of the lubricants of interest in a low-temperature environment [10,11].
| Parameter | Castrol TT-1 | Vigo RE-0 |
|---|---|---|
| Kinematic viscosity (40 °C) | ~30–40 mm2/s (synthetic oil, low viscosity) | 81.3 mm2/s (synthetic & mineral base) |
| Useful temperature range | –60 °C to +120 °C | –40 °C to +130 °C |
| Viscous friction (at 3000 rpm) [Nm] | Low, suitable for high rpms | Higher declared robustness |
| Behavior at low temperatures | Stable, enables reliable start-up | Significantly reduced, risk of failure to start |
| Predominant deployment | Sub-zero environment applications, where the starting torque is critical | Applications with greater load at regular temperatures, not frost-optimized |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



