
Submitted:
29 January 2026
Posted:
30 January 2026
You are already at the latest version
Abstract
This paper presents an integrated mathematical model aimed at improving the safety and operational efficiency of train traffic in centralized railway dispatching systems. The proposed approach combines the alternative graph model with a Mealy automaton to synchronously address route planning, delay minimization, and strict compliance with safety requirements. Formal automata theory is employed to describe routing logic and signal control through state transitions, while the alternative graph model represents scheduling constraints and resource conflicts. To enhance real-time adaptability, a tabu search algorithm is implemented for train schedule optimization, enabling dynamic rescheduling under changing operational conditions. The mathematical formulation incorporates blocking time parameters, a system of discrete constraints, and automaton-based safety conditions governing train movements and route authorization. The integrated model explicitly formalizes the processes of block section occupation and release, ensuring consistency between control logic and scheduling decisions. Practical testing and computational experiments demonstrate that the proposed approach effectively reduces train delays, improves the reliability of dispatch control, and increases system resilience to dynamic disturbances. The results confirm that the developed model can be implemented within existing centralized dispatching infrastructures without requiring a complete system overhaul. Overall, the proposed framework expands the functional capabilities of centralized dispatch systems by enabling efficient schedule generation, minimizing the propagation of delays, and ensuring reliable command exchange between central control posts and field-level railway infrastructure.
Keywords:
centralized dispatching
; alternative graph model
; Mealy automaton
; tabu search algorithm
; train traffic
; safety constraints
1. Introduction
Centralized dispatch control systems play a crucial role in the organization of train traffic and the assurance of operational safety in railway transport [1]. The primary objectives of such systems include the efficient coordination of train movements [2], the prevention of conflicts, and the timely response to disruptions while maintaining strict compliance with safety regulations. In recent years, the rapid growth of railway traffic volumes, increasing network density, and the integration of high-speed and conventional rail services have significantly increased the complexity of dispatch control tasks [3] As a result, dispatchers are required to process large volumes of heterogeneous data and make real-time decisions under conditions of uncertainty and time pressure [4].
One of the major challenges in modern railway operations is the minimization of train delays while simultaneously managing route [5] assignments and resource utilization. Disturbances such as equipment failures, infrastructure constraints, and unplanned changes in traffic demand can propagate through the network and negatively affect overall system performance [6]. Traditional dispatching methods, which are often based on fixed rules or manual intervention, are limited in their ability to respond effectively to such dynamic situations, particularly in large-scale and heavily utilized networks [7]. This limitation has motivated the development of formal mathematical models that provide systematic and computationally efficient support for dispatch decision-making [8].
From an applied mathematics perspective, railway dispatch control can be formulated as a discrete-event scheduling and control problem with multiple conflicting constraints [9]. The problem involves the allocation of shared resources, such as tracks and stations, the determination of precedence relations among trains, and the enforcement of safety constraints that govern train separation and routing [10]. Mathematical modeling of these processes enables a rigorous analysis of system behavior and facilitates the development of algorithms capable of generating feasible and near-optimal solutions in real time.
Among the mathematical tools employed for such purposes, the alternative graph model has been widely used to represent scheduling problems characterized by conflicts and alternative choices [11]. This model provides a compact and expressive framework for describing precedence constraints, resource-sharing relationships, and feasible routing options [12]. In parallel, formal automata theory offers a well-established method for modeling control logic through state transitions triggered by events and system inputs. The use of automata allows the formalization of safety rules, operational protocols, and decision-making logic in a mathematically precise manner.
The integration of the alternative graph model with formal automata theory creates a unified mathematical framework that combines structural network modeling with dynamic control mechanisms. This integration enables the systematic resolution of conflicts, the prioritization of routes, and the enforcement of safety constraints within a single computational framework [13]. Moreover, such a combined approach supports the development of optimized algorithms capable of responding rapidly to changes in operating conditions, which is essential for real-time dispatch control.
This paper develops optimized algorithmic approaches for centralized railway dispatch control based on the integrated use of the alternative graph model and formal automata theory. The proposed methods are designed to support real-time decision-making by enabling efficient processing of large data sets, minimizing train delays, and ensuring safe and reliable train operations. In addition to the theoretical formulation, the paper discusses practical aspects of implementing the proposed algorithms within existing dispatch control systems [14]. The presented results demonstrate the potential of the developed approach to enhance the performance, robustness, and scalability of modern railway dispatch systems, contributing to the advancement of applied mathematical methods in transport control and optimization.
2. Problems of Real-Time Train Control and Monitoring
Real-time train control has been available since the inception of rail transport [15]. Currently, train movement is almost universally monitored and regulated [16] primarily through signaling, interlocking, and blocking systems (SIB). SIB systems can perform important tasks such as selecting the direction of travel and determining a safe distance between trains. Train safety depends on defining a safe zone in real time around each train and ensuring that no other trains are within these zones [17]. A train route on a railway can be viewed as a sequence of track sections. Each track section is shown to be occupied, and the travel time is calculated in the literature [18]. These intermediate values depend on the length, speed, stopping time, and many other factors of the moving train. In rail transport, due to the limited number of track sections and sections, it is advisable to take into account or calculate the time after the train begins moving to its destination. This allows for the assessment of the impact of unexpected train delays on the movement of other trains [19]. A pressing issue in train traffic management on a section is the need to determine the route sequence and make planning decisions to minimize the impact of delays.
The main goal of automating the centralized dispatch system (CDS) is to improve train schedules and expand the capabilities of station route generation based on them [20]. At the same time, taking into account train priority, it will be necessary to reduce the mutual influence of train schedules and eliminate various types of interference [21]. This will minimize train schedule delays [22].
When operationally managing train traffic on rail transport, it’s necessary to consider train routes, track occupancy times, and potential conflict situations [23]. To this end, alongside expanding the functionality of train dispatcher (TDC) traffic management systems [24] that manage transportation processes [25], a number of mathematical models and algorithmic methods are used to model the process and solve problems [26]. First, let’s examine how a system based on the mathematical theory of blocking time, an alternative graph model, and search algorithms enables the detection and resolution of conflict situations that arise in train traffic [27].
Train traffic safety involves creating a safe zone around each train and preventing other trains from entering this zone [28]. Railroad traffic can be viewed as a sequence of sections and segments [29]. Each section and segment takes a certain amount of time, which depends on the train’s length, speed, stopping time, and other factors [30]. A key task in traffic management is to minimize the impact of one train’s delays on the movement of others. Mathematical models are used for this purpose, including blocking time theory, the alternative graph model, and the tabu search algorithm [12,26]. These methods allow for the identification and resolution of potential traffic conflicts. According to safety requirements, when a train passes through a certain section of track, that section is completely blocked and cannot be used by other trains. Blocking time is defined as the interval from the moment a train occupies the blocking section until it is completely cleared and a safe distance is established. For the mathematical description, the model takes into account additional time intervals:
driver’s perception and reaction time ,
traffic light change time ,
reserve time .
Their sum forms the value of the blocking time for each section in the following expression (1). is considered as
To incorporate the above laws into a mathematical model, we use the alternative graph theory. This model is one of the main mathematical models for constructing train schedules. It was first proposed by Mascis and Pacciarelli [1]. In alternative graph theory, the events of each train entering and leaving a block section are described by a separate graph. The train’s sequential passage through block sections along the route is regulated by directional arcs (arcs reflect the duration of the train’s travel along the block section). If the calculation determines that two or more trains will arrive at a certain section simultaneously, a pair of arcs with opposite directions is added to account for possible conflicts (Figure 1).
Where, A train arrival event and B on the block site, The event of trains A and B being released from the block section. The arcs pointing in opposite directions represent two different scenarios:
- -
- In a directional arc with black color, train A in front, train B after
- -
- In the green directional arc, train B is before, train A is after.
When one of the alternatively directed arcs is selected, the conflict is resolved and the other directed arc is automatically rejected.
The tabu search algorithm has also been used in scientific research. Tabu search is one of the most common approaches to solving complex problems [2]. A special search method for rerouting trains has been described in the literature (Figure 2).
Initially, a planned train schedule is generated. In this case, the selected route is given priority to allow each train to pass through the station without stopping on the main track. The detection algorithm then selects an alternative route for each train. It also rebuilds the new schedule. If the result improves, it accepts it; otherwise, it moves on to another option. The reason for choosing this algorithm is that it includes tried options in a list of prohibited ones, thereby preventing the same solution from being tried twice. As a result, calculation time is somewhat reduced.
Based on the above, the control problem in a distributed computing system can be expressed as a discrete optimization problem. The goal is to minimize the longest path length in the graph, i.e., to minimize the longest delay.
Formal Model of an Automaton
We model the possibilities of installing each available route at a linear point (LP) using automata theory. Automata (2) consists of six components. We describe the collection as follows:
Where, a set that defines the state of route objects in the LP (incoming alphabet); multiple memory management; set of states of the machine; transition function; output function; multiple output signals.
The route structure of the LP includes all information about switches, traffic lights, sections with and without switches, and paths. Z collected into a set (Figure 3).
One arrow,switch and switchless sectionsmay participate in more than one route, this situation is illustrated by the shaded part in Figure 3.
Generalized structural diagram of the machine is shown in Figure 4.
In Figure 4 there is a machine consists of two functional blocks. Generates the output signal of the machine and the memory control signal. The memory of the machine is a set of flip-flops.
When constructing a route, the state of the LP also depends on events occurring at the object. Since the output signal is directly related to the current input signal and state, we use a Mealy machine, given its ability to respond quickly. According to the Mealy machine, the transition and output functions are expressed as follows:
Set of states of the machine Let’s take a closer look. The main goal is to express combinations of previously established/unestablished routes and their compliance with safety requirements as formal cases for selected route segments. Within this model, we identify four main cases and describe them as shown in Table 1.
We create a transition table and output function for the machine (Table 2):
The graph shows four states and transitions between them. Initial state. is considered. If the route is specified in the LP, the machine makes a transition to the state On the other hand, if a section of the route becomes occupied without any route being established or one of the switches involved in the route loses control,the machine goes into a state Technically, switch or non-switch sections will not be blocked, and a section will not be occupied without a route established. In this model of the machine, the condition determines the impossibility of a direct transition from the state in a state When the route is set and the train begins to sequentially occupy block sections, the machine makes a transition to the state , which reflects the formalization of the route occupation process in the model. After the section is vacated by a train, the machine, in accordance with the adopted route release scheme, performs a transition: in the case of a route release, to the state , when opened separately - in the state , which ensures the formalization of the process of returning the system to an acceptable state. Thus, the Mealy automaton model allowed us to formally identify four main states and strictly define the patterns of their transitions. This made it possible to represent the process of preparing a selected route in the centralized dispatch system as a mathematical automaton model, which increases the accuracy and reliability of the analysis. The output signals of the automaton states are interpreted as follows: in state , the traffic light has a permissive signal display that allows the train to proceed in the following states And the traffic light shows a red signal, in a state The red light on the traffic light will still be on, but the train will continue to move along its route.
Integrated Model: Variables and Constraints
Thus, two key components—an alternative graph model that provides real-time traffic control, and a Mealy automaton that formalizes the logic of TS and TU signals—are combined into a single integrated mathematical model. In this model, the occupancy and release times of switch and non-switch sections, as well as block sections, are considered as control variables for dispatcher decisions, and the Mealy automaton introduces a system of constraints whose violation is prohibited due to safety requirements.
Key variables: for each train and each block section train reservation time for sections with and without switches and block sections on routes, Clearance time. If, before entering block b, train t has successively passed through switch or switchless sections or block sections of route b−1, a corresponding sequential blocking time is introduced to ensure safety.
Where, represents the time it takes a train to traverse a switch or switchless section or a block section of route b−1. This inequality formalizes the chronological consistency of each train route and ensures the correctness of the time sequence.
According to safety requirements, two trains cannot occupy the same block section at the same time. In the model, this requirement is expressed by choosing alternative edges in the alternatives graph. Formally, if trains t and have the possibility of conflict on a switch or switchless section or block section of route b, a restriction is imposed in the form of condition (6):
Where, denotes the minimum time interval that must be maintained after train t leaves a switch or switchless section or a block section of route b until the train enters The value of this interval is determined by the blocking time, calculated depending on the characteristics of the components. The above logical “OR” the condition means that initially the train passes first and enters it after a specified time interval or first and then. The model can introduce a suitable alternative variable for making this decision and represent both cases by a system of separate linear inequalities (7).
Where, sequence of trains in a switch or switchless section or block section on route b, Big-M Constant. Using the constant M, two alternative constraints are written down, representing a discrete choice, and only one of them becomes “active” depending on the value . The Big-M value depending on the travel time of trains in a switch or switchless section or block section on route b. The Big-M value is determined by formula (8).
Where, T – a set of trains operating on the section in question, B – a multitude of switch and non-switch sections, as well as block sections included in the section under consideration.
As a result, for each pair of these representations, one arc with opposite directions is selected, which guarantees the absence of cycles in the graph. This constraint is a key part of the DNC’s solutions—it determines which train will be given priority.
An essential component of the model are the constraints associated with signal states. Their introduction is necessary to ensure compliance with the operating rules of the Mealy machine. The model identifies two main conditions that determine acceptable signal states:
- Route assignment condition: For a train to enter a switch or switchless section or block section, a route must first be assigned to that section (otherwise, the signal will not be cleared, and the train will not be able to proceed along the route). In the model, this condition is directly related to the train conflict restrictions. And : if train t comes first, it means that before train t arrives a route has already been established for it, and the corresponding switch or switchless section or block section is occupied; otherwise, the train receives priority , and train t is waiting. Solution for variable is allowed only when the route is pre-set specifically for train t (state ). According to the Mealy machine, permission for the train dispatcher to set a route for a train means the machine transitions from the state in a state If the solution of the model involves assigning time for train t without allocation of the corresponding route, this is considered as an unacceptable event (state , prohibited), and such a decision is considered incorrect. Therefore, when constructing the model, the possibility of a direct transition to the state : the combined effect of conflicting constraints and route conditions completely eliminates this option
- The condition for the occupancy of a switch or switchless section or block section is formulated as follows: after a train enters a given section, until it is vacated, it is impossible to assign another train to pass the corresponding route elements. This condition follows directly from the system of conflicting inequalities: if train t is on route section b, then another train cannot be assigned a time to pass the same section. In the logic of the Mealy machine, this situation corresponds to the state , the duration of which limits the possibility of transition to a state for other trains. In the integrated model, this constraint is guaranteed for all pairs of trains, since for any pair a time interval D must be observed between the moments of exit and entry, which excludes the possibility of simultaneous entry.
The above conditions are implemented in the integrated model in the form of state constraints formalized using mathematical functions of the automaton and graph constraints. Ultimately, the model combines two key components: (i) directed selection of train movement timing parameters based on an alternative graph approach; (ii) verification of each control command for compliance with safety requirements using Mealy automaton constraints.
The Structure of the Proposed System
The structural diagram of the system is shown in Figure 6.
The transmission system device in the diagram is part of the complex that provides communication between the central control station (CC) and the line station (LS). The DNC automated control system serves as the interface for monitoring train status on the section and as the central hub for generating commands for their control. Using signals received via the TS channel, a visual display of the section’s status is generated. Information received from the LS is initially processed at the DNC automated control system and then made available to the appropriate personnel via the local network. It is important to note that the readings on the SHN automated control system are identical to those on the DNC automated control system, which, in turn, allows for monitoring the troubleshooting process at the LS and serves as a means for initial technical consultation.
Data on the train number, weight, length, destination, locomotive, and locomotive crew are received from the Train Schedule Server (TSS). This information is essential for determining the category and priority of each train. To determine decisions, additional information is generated in the fixed and variable criteria server: the track profile, “technological windows” provided by the relevant companies, trackside warnings, and other data. All received information affecting train movement is compiled in the system’s decision-making server, where a route sequence is generated and transmitted to the DNC automated workstation. After the proposed decision is approved by the DNC, the corresponding command is sent from the DNC automated workstation to the LP via the transmission device and the TU channel.
It should be noted that additional protocols have been implemented to ensure the reliability of information exchange between the LP and the CP (specifically, packet verification using CRC codes and waiting for a synchronous response). For example, after sending a command from the CP, the LP acknowledges its receipt, and then, after executing the command, communicates the result via the TC channel. The CP also periodically sends synchronous requests (SR), allowing for a complete visualization of the current state of the LP. Upon receipt of such a request, the LP PLC aggregates all important information (e.g., the occupancy of all track sections, the status of all traffic lights) and transmits it to the CP in the form of a TC signal. Thus, the CP always has up-to-date information on the system state. If changes to the plan are necessary (for example, if a train is significantly late and the track needs to be made available to another train), the CP recalculates using the alternative graph model and generates a new solution. The sequence of commands is transmitted to the LP, where they are implemented using Moore machine logic, ensuring secure signal exchange.
This centralized automated control creates a closed loop: optimization algorithm → commands → floor devices → measurements → optimization. As a result, the system quickly adapts in real time to dynamic changes (delays, malfunctions, etc.), ensuring safe and efficient traffic management.
Crossingtwo Trains on a Single-Track Section at One Station
Let’s consider a situation where two trains moving towards each other must cross on a single-track section within a station. (see Figure 7).
There is no established route at the station in question - the system is in a state Within the alternative graph model, the question of which train will be allowed to proceed first is decided. Let’s say that priority in the graph is given to train A, while train B is designated as waiting. The arrival times of the trains at the station are designated as And and are checked by the condition The model then automatically imposes the appropriate restrictions. Since train B is considered waiting, it is accepted onto the side track, while train A receives priority passage on the main track.
In this case, the Mili A machine is intended for the train. Moves automatically when train A arrives at the station. Train A waits on the siding until train A has fully entered the station. The conflict constraint in model (8) guarantees exactly this order: train A cannot depart until train A has fully entered the station. In this situation, the Mealy automaton for train A implements the transition to state , and after train A enters the station, transition to the state Until train A fully enters the station, train B is forced to wait on a side track. Conflict constraint (8) built into the model guarantees this order: until train A is fully cleared, train B is prevented from exiting:
where m is the last common section on the route of train A and the first common section on the route of train B.
After train A has cleared section m, the machine on its side at the moment of time returns to state For train B, the conflict situation is resolved, and a command to open a route for train B is transmitted from the central control unit to the central control unit, which causes the automatic control unit on its side to switch to the state Train B starts moving and, having occupied the first section, switches the machine to the state . Once the section is released, the machine returns to the state Thus, the integrated model demonstrates an optimal and safe solution: priority for train A is determined by both safety requirements and the desirability of minimizing delays. All commands are exchanged in strict accordance with the rules of the Mealy automaton. If the priority of trains A and B changes and they cross, for example, at a station , train A would be accepted onto the main track and wait.
Real-Time Schedule Adjustments When a Train Is Late
Another area of application for the model is dynamic adaptation to deviations from the original schedule. For example, of two trains scheduled to arrive at a station in sequence, one (Train 1) is delayed due to technical issues. According to the original schedule, Train 1 was supposed to enter the station first, with Train 2 following. However, due to the delay, Train 2 arrives earlier. In this situation, the integrated model in the centralized dispatch system promptly recalculates a new solution. According to the alternative graph, swapping the priority between the late Train 1 and the on-time Train 2 minimizes delays, allowing Train 2 to proceed first and delaying Train 1 (with minimal impact on other trains). The model generates a route plan for Train 2 (selecting the corresponding alternative arc). As a result, the traffic lights near the station indicate that Train 2 is permitted to proceed. Train 2 passes the station, and then a track is opened for Train 1. The entire process is supported by constant communication with the central control center: delays are monitored via the TS channel, the alternative schedule model is recalculated, and a decision is made, which is approved by the DNC dispatcher and transmitted via the TU channel. At the line station, the PLC ensures the safe execution of the command. This example demonstrates the ability of the integrated model to support adaptive dispatching decisions in real-world conditions. This ensures the interconnection between planning and control signals, allowing traffic to be organized even when changes occur on the line.
3. Conclusions
In this paper, an integrated mathematical framework based on the alternative graph model and the Mealy automaton has been developed to address the problem of analysis and control in a centralized railway dispatch system. The proposed approach provides a formalized representation of the scheduling, routing, and control processes, allowing complex operational constraints to be modeled within a unified mathematical structure. By combining graph-based representations of alternative routes with automaton-based state transition mechanisms, the model ensures strict compliance with safety requirements while maintaining operational feasibility under dynamic and uncertain conditions.
The integration of the alternative graph model enables an explicit description of conflicts, precedence relations, and resource-sharing constraints among trains, whereas the Mealy automaton formalizes control logic through well-defined state transitions driven by external events and system inputs. This mathematical coupling facilitates the efficient generation of feasible train schedules, supports systematic route prioritization, and allows rapid adaptation to changes in traffic conditions or infrastructure availability. As a result, the dispatch system is capable of making timely and consistent decisions while preserving safety and reliability.
Computational experiments and practical testing conducted on representative railway scenarios demonstrate that the proposed framework leads to a measurable reduction in train delays and an improvement in overall system stability. The results confirm that the model enhances the robustness of dispatch decisions, particularly in high-load and conflict-prone situations, where traditional heuristic or rule-based methods often exhibit limited performance. The observed improvements highlight the effectiveness of the proposed mathematical formulation in managing discrete-event dynamics inherent in railway transport systems.
From an applied mathematics perspective, the developed model represents a scalable and theoretically grounded approach to solving complex discrete-event scheduling and control problems. Its modular structure allows for further analytical investigation, including complexity analysis, performance evaluation, and extension to stochastic or multi-agent formulations. Moreover, the generality of the proposed framework makes it applicable not only to railway dispatching but also to a broader class of large-scale, safety-critical systems, such as urban traffic control, logistics networks, and industrial automation systems. Future research may focus on incorporating uncertainty modeling, real-time optimization techniques, and learning-based components to further enhance the adaptability and efficiency of the proposed approach.
References
- Sapozhnikov, Vl.V.; Gavzov, D.V.; Dreiman, O.K.; Kononov, V.A.; Nikitin, A.B. Centralized dispatching systems. Textbook for higher education institutions of railway transport Under the general editorship of prof. - M.: Publishing house “Route”, 2002. - 407 p.
- Qiu, J.; Helbig, R. A field study of work demands on railway traffic dispatchers in centralised centres. in Proceedings of 2012 International Conference on Quality, Reliability, Risk, Maintenance, and Safety Engineering, ICQR2MSE 2012 pp. 1448–1451.
- Sun, Y.; Zhang, Q.; Yuan, Z.; Gao, Y.; Ding, S. Quantitative Analysis of Human Error Probability in High-Speed Railway Dispatching Tasks. IEEE Access 2020, 8, 56253–56266. [Google Scholar] [CrossRef]
- Khmelnitsky, E. On an optimal control problem of train operation. IEEE Transactions on Automatic Control 2000, 45, 1257–1266. [Google Scholar] [CrossRef]
- Muhiddinov, O.; Boltayev, S. Route management modeling of high-speed trains on the train dispatcher section. in E3S Web of Conferences 376, (EDP Sciences, 2023).
- Mukhiddinov, O.; Boltayev, S.; Yunusova, G.; Khidirov, E.; Yoldashev, I. Development of a route setting model in the dispatching centralization system. in E3S Web of Conferences 515, (EDP Sciences, 2024).
- Gorbachev, R.; Novikov, A.; Kalinkin, A.; Cheranev, A.; Zakharova, E. Applying Virtual Modelling to Verify Control Systems Decision with Artificial Intelligence in Railway Transport. 2020 International Conference Engineering and Telecommunication (En&T), Dolgoprudny, Russia, 2020, pp. 1-6.
- Ferrari, A.; Mazzanti, F.; Basile, D.; Ter Beek, M.H. Systematic Evaluation and Usability Analysis of Formal Methods Tools for Railway Signaling System Design. IEEE Transactions on Software Engineering 2022, 48, 4675–4691. [Google Scholar] [CrossRef]
- Wang, H.Q.; Xue, W.J. Development and application of the railway transportation management information system. Applied Mechanics and Materials 2013, 385–386, 1848–1851. [Google Scholar] [CrossRef]
- Pachl, J. Railway Operation and Control; VTD Rail Publishing: Mountlake Terrace, USA, 2002. [Google Scholar]
- Zhao, G.; Lin, F.; Wang, L.; Wei, F.; Jianxin, Ch.; Liu, K.; Wang, M.; Li, H. Centralized train dispatch control system and control method. European patent application publication EP3763598A1, 2021.
- Corman, F.; D’Ariano, A.; Pacciarelli, D.; Pranzo, M. A tabu search algorithm for rerouting trains during rail operations. Transportation Research Part B Methodological 2010, 44, 175–192. [Google Scholar] [CrossRef]
- Julich, P.; Wills, M. System and method for computer aided dispatching using a coordinating agent. United States patent application publication US20040172174A1, 2004.
- Mascis, A.; Pacciarelli, D. Discrete Optimization: Shop Floor Scheduling with Blocking and Waiting-Free Constraints. European Journal of Operations Research 2002, 143, 498–517. [Google Scholar] [CrossRef]
- Berger, U.; James, P.; Lawrence, A.; Roggenbach, M.; Seisenberger, M. Verification of the European Rail Traffic Management System in Real-Time Maude. Science of Computer Programming 2018, 154, 61–88. [Google Scholar] [CrossRef]
- Wang, P.; Goverde, R.M.P.; Ma, L.A. Multiple-Phase Train Trajectory Optimization Method under Real-Time Rail Traffic Management. in IEEE Conference on Intelligent Transportation Systems, Proceedings, ITSC 2015-October, 771–776.
- Cacchiani, V.; Huisman, D.; Kidd, M.; Kroon, L.; Toth, P.; Veelenturf, L.; Wagenaar, J. An overview of recovery models and algorithms for real-time railway rescheduling. Transportation Research Part B Methodological 2014, 63, 15–37. [Google Scholar] [CrossRef]
- Corman, F. Real-Time Rail Traffic Management: Dispatching on Complex, Large, and Congested Rail Networks (No. T2010/14). The Netherlands: TRAIL Research School, The Netherlands, 2010.
- Corman, F. Real-time railway traffic management: dispatching in complex, large, and busy railway networks. PhD thesis, Delft University of Technology, Netherlands, 2010.
- Miao, Y. Research on centralized dispatching system of rail transit. in Proceedings - 3rd International Conference on Intelligent Transportation, Big Data and Smart City, ICITBS 2018 2018-January, pp. 34–37.
- Shakibayifar, M.; Sheikholeslami, A.; Corman, F.; Hassannayebi, E. An integrated rescheduling model for minimizing train delays in the case of line blockage. Oper Res Int J 2020, 20, 59–87. [Google Scholar] [CrossRef]
- Dong, H.; Ning, B.; Cai, B.; Hou, Z. Automatic train control system development and simulation for high-speed railways. IEEE Circuits and Systems Magazine 2010, 10, 6–18. [Google Scholar] [CrossRef]
- Corman, F.; D’Ariano, A.; Pacciarelli, D.; Pranzo, M. Centralized versus distributed systems to reschedule trains in two dispatching areas. Public Transport 2010, 2, 219–247. [Google Scholar] [CrossRef]
- Shakibayifar, M.; Hassannayebi, E.; Mirzahossein, H.; Zohrabnia, S.; Shahabi, A. An integrated train scheduling and infrastructure development model in railway networks. Scientia Iranica 2017, 24, 3409–3422. [Google Scholar] [CrossRef]
- D’Ariano, A.; Pranzo, M.; Hansen, I.A. Conflict Resolution in Rail Traffic Control Using Alternative Graphs. Journal of Intelligent Transport Systems 2008, 12. [Google Scholar]
- Meng, X.; Wang, Y.; Xiang, W.; Jia, L. An integrated model for train rescheduling and station track assignment. IET Intelligent Transport Systems 2021, 15, 17–30. [Google Scholar] [CrossRef]
- Sun, Y.; Ding, S.; Li, Z.; Ren, Y.; Sheng, K.; Yang, Y. Research on Human Reliability of the High-Speed Railway Intelligent Dispatching Centralized Traffic Control System. In 2022 IEEE 7th International Conference on Intelligent Transportation Engineering, ICITE 2022, pp. 111–116.
- Ferrari, A.; Mazzanti, F.; Basile, D.; Ter Beek, M.H. Systematic Evaluation and Usability Analysis of Formal Methods Tools for Railway Signaling System Design. IEEE Transactions on Software Engineering 2022, 48, 4675–4691. [Google Scholar] [CrossRef]
- Xu, W.; Dai, X.; Zhao, C.; Tang, Y.; Cheng, J.; Qu, Z.; Zhang, T.; Lv, Y. Parallel Testing for Centralized Traffic Control Systems of Intelligent Railways. IEEE Transactions on Intelligent Vehicles 2023, 8, 4249–4262. [Google Scholar] [CrossRef]
- Harrod, S.S. Railway Signal Digitalization with the European Rail Traffic Management System and Positive Train Control: Industry 4.0 Expectations and Reality. Transportation Research Record 2025, 2679, 1052–1065. [Google Scholar] [CrossRef]
Figure 1.
Alternative graph model.
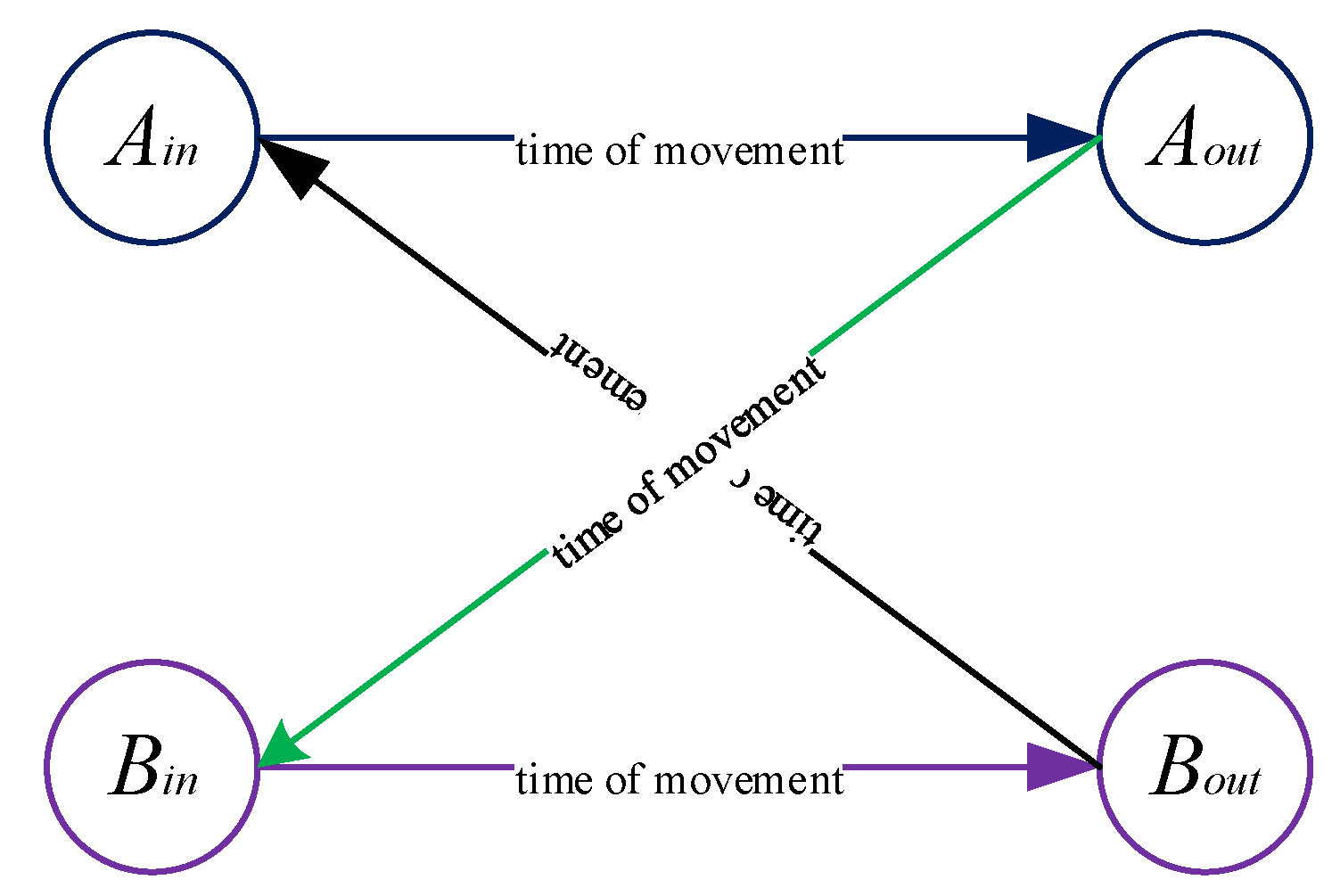
Figure 2.
Real-time route replanning architecture.
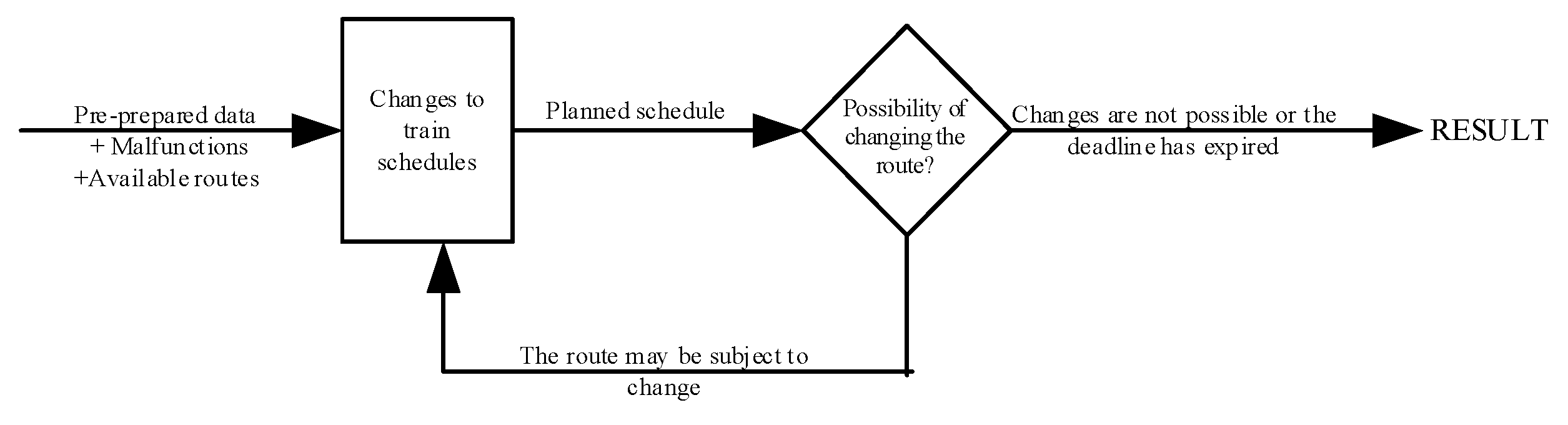
Figure 3.
graphical form of a set.
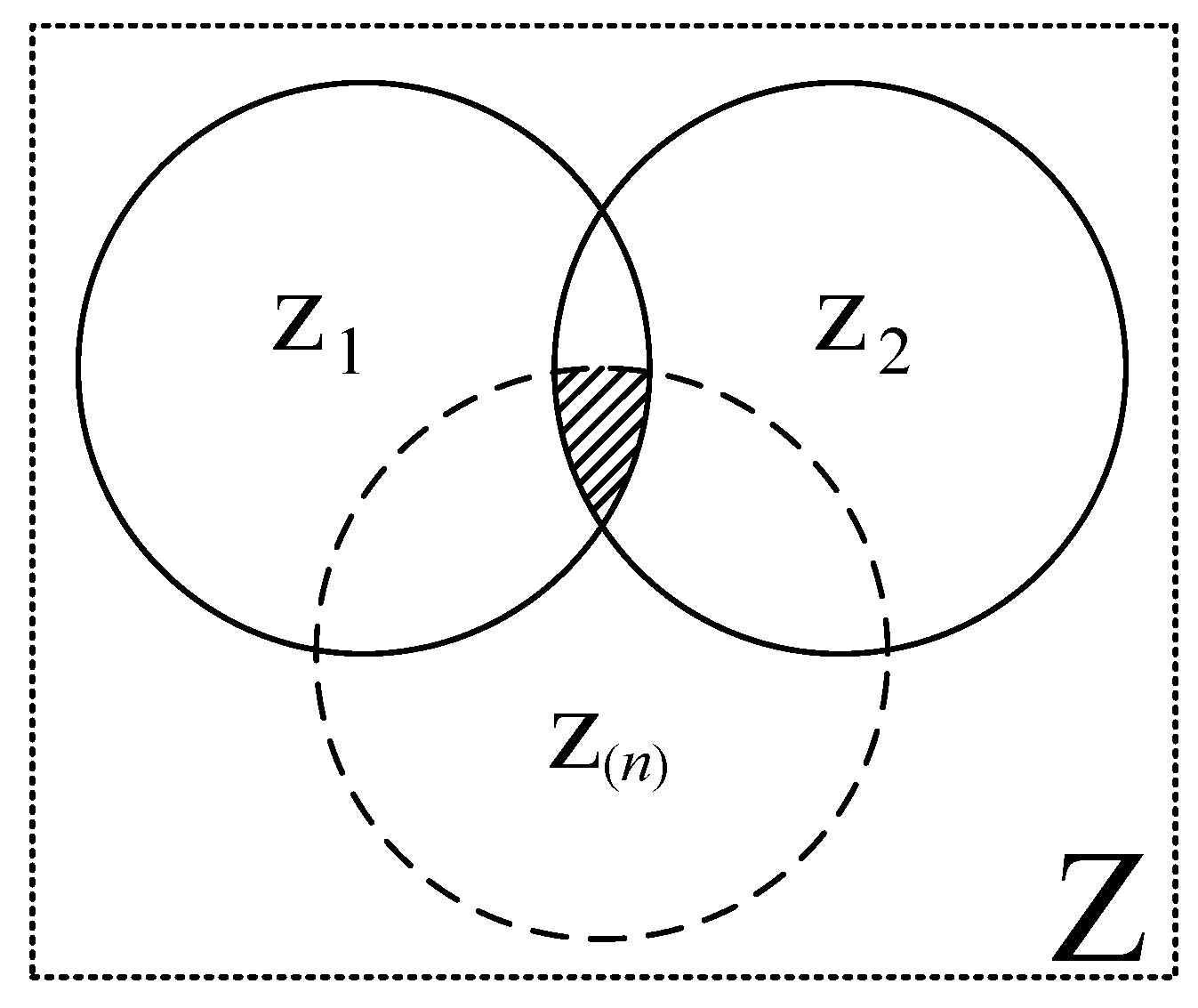
Figure 4.
.
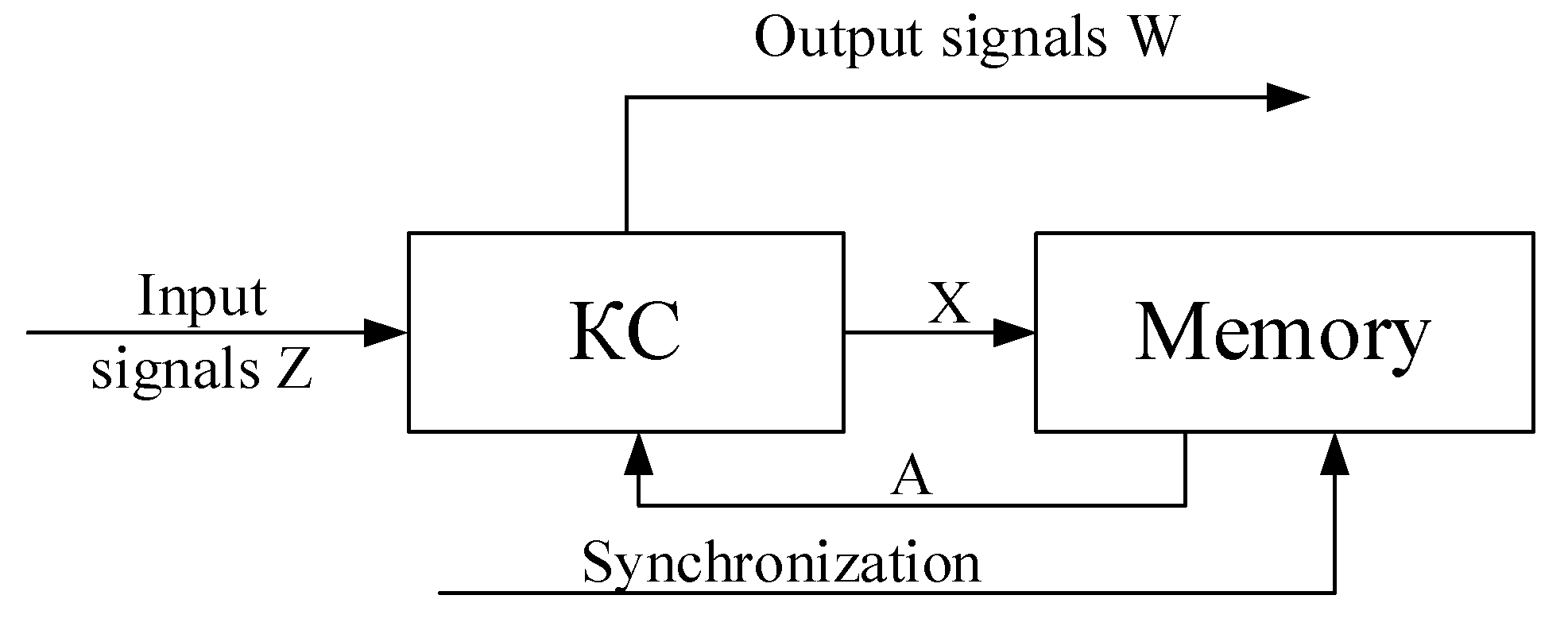
Figure 5.
Graphical representation of the automaton C.
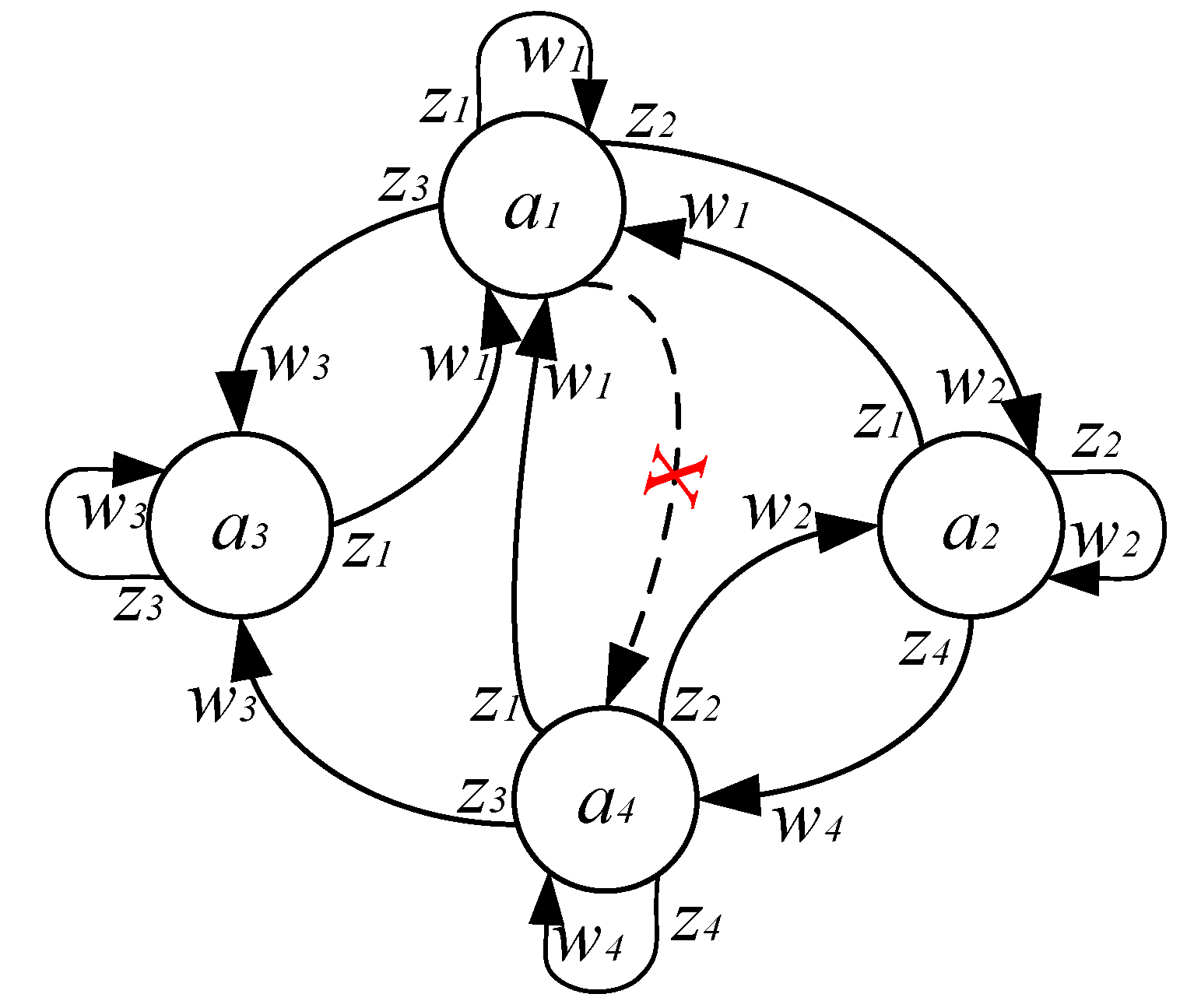
Figure 6.
Structural diagram of the system in the CPU.
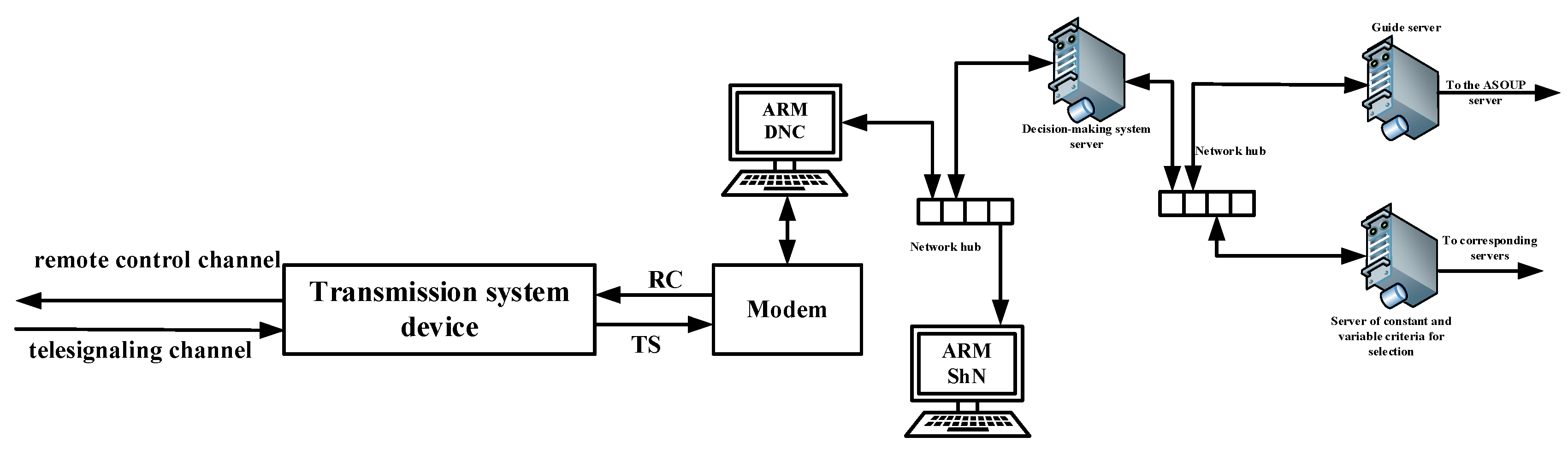
Figure 7.
Intersection of two trains on a one-way section at one station.
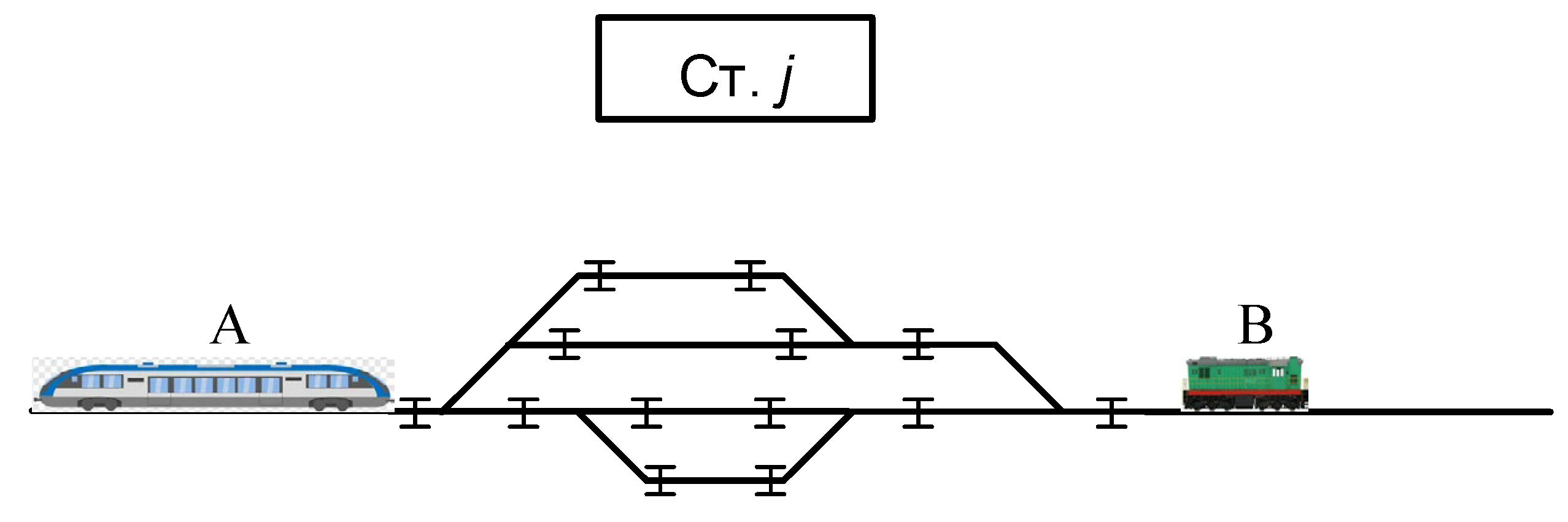

Table 1.
Machine states.
| State | Description |
|---|---|
| The selected route does not pass through the LP facilities and complies with safety requirements. | |
| The selected route is defined by objects in the LP and objects are blocked in the route, as well as empty ones | |
| The selected route does not pass through the LP facilities and does not meet safety requirements. | |
| The route that will be selected is determined by the objects in the LP, and the objects are blocked in the route and occupied |
Table 2.
Ftransition and exit function of the automaton C.
| transition table | output table | ||||||||
|---|---|---|---|---|---|---|---|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



