
Submitted:
15 December 2025
Posted:
16 December 2025
You are already at the latest version
Abstract
Water supply and drainage networks are essential components of urban infrastructure, directly influencing both residents' quality of life and the efficiency of city operations through their safety and stability. Over time, these networks often develop non-structural turbid water conditions, which present challenges for traditional maintenance methods. Leveraging the advantages of spatial visualization, three-dimensional environmental reconstruction technology has emerged as a promising solution to address these issues, while also advancing the use of intelligent maintenance technologies within water supply and drainage systems. This paper focuses on the causes of non-structural turbid water in these networks, and evaluates the optimization, effectiveness, and limitations of turbid water imaging, image feature recognition, and 3D environmental reconstruction technologies. Additionally, it re-views the current technical challenges and outlines potential future research directions, aiming to support the development and application of 3D reconstruction technologies for pipeline networks under non-structural turbid water conditions.
Keywords:
water supply and drainage pipeline network
; non-structural environment
; turbid water imaging
; image feature recognition and matching
; 3D reconstruction
1. Introduction
Water supply and drainage networks are critical components of urban infrastructure, directly impacting residents' daily lives and the city's economic development. With prolonged use, water supply and drainage pipelines often accumulate sediment and foreign objects internally, while defects such as pipe misalignment and wall damage develop [1]. These issues alter the pipeline environment, creating unstructured turbid water conditions. Combined with the low light levels, confined spaces, and pressurized water conditions inside supply pipes, this environment imposes significant constraints and challenges on pipeline operation and maintenance technologies. To address operational challenges and advance pipeline maintenance technologies, nations have introduced corresponding policies. For instance, the United States proposed the Infrastructure Investment and Jobs Act in 2021, allocating approximately $55 billion to upgrade roughly 1.2 million kilometers of water supply infrastructure., with $15 billion specifically earmarked for replacing lead pipes [2]. China plans to renovate nearly 600,000 kilometers of urban gas, water supply and drainage, heating, and other pipeline networks between 2025 and 2030, with total investment requirements reaching approximately 4 trillion yuan.
In recent years, 3D environment reconstruction technology has garnered extensive research and attention in addressing operational challenges within unstructured turbid water environments of water supply and drainage networks. This technology enables precise diagnosis of pipeline conditions, clearly visualizes pipeline defects through 3D models, and accurately locates defects for targeted repairs and cleaning. It reduces unnecessary excavation costs, enhances operational efficiency, and safeguards water quality. This paper aims to review the methods and effectiveness of 3D environment reconstruction technology in unstructured turbid water environments. It analyzes key research focuses and existing shortcomings within water supply and drainage networks, while summarizing and projecting the primary technical challenges and development trends of this technology in such systems.
2. Characterization of Unstructured Turbid Water Environments
2.1. Formation Causes of Unstructured Turbid Water Bodies
Over time, pipelines gradually shift from structural to unstructured conditions due to factors such as material degradation, settlement-induced deformation, and sediment accumulation, as shown in Figure 1. Pipes subjected to continuous water flow, fluctuating pressures and temperatures, and chemical corrosion undergo corrosion, wear, and cracking, which compromise their structural integrity. Metal pipes, in particular, are vulnerable to oxidative corrosion when exposed to oxygen and chlorides, forming rust layers. At the same time, mineral precipitation leads to scale deposits, roughening the interior pipe surface and increasing resistance, which accelerates further sediment accumulation. Additionally, foundation settlement and deformation can cause pipe misalignment or distortion, resulting in localized flow irregularities that exacerbate sediment buildup and accelerate structural deterioration, ultimately undermining the pipeline’s functional integrity.
Microorganisms, their metabolic byproducts, sediment, and external contaminants all contribute to water turbidity. Rust and sediment provide nutrients for microbial growth, promoting biofilm formation and further degrading water quality. Moreover, pipe ruptures or loose joints allow external contaminants, such as sediment and organic matter, to enter the pipeline, increasing suspended particles and microbial load, which intensifies turbidity. Furthermore, during operations, inspection or cleaning robots may disturb sediment within the pipeline, resuspending it in the water and further elevating turbidity levels.
2.2. Environmental Characteristics of Unstructured Turbid Water
From the perspective of the internal pipeline environment, unstructured turbid water bodies exhibit distinct characteristics of heterogeneity and dynamism. Spatially, sediments and biofilms often accumulate unevenly, with thicker deposits forming at the pipe bottom and in low-velocity zones, while suspended particles may dominate near the pipe top and in high-velocity flow areas. Temporally, water turbidity dynamically fluctuates in response to changes in flow velocity, external disturbances, or pressure variations. In terms of water composition, it consists of a complex multiphase mixture rich in high concentrations of suspended solids, colloidal particles, planktonic and attached microorganisms, dissolved pollutants, and their reaction products, exhibiting significant turbidity fluctuations. Furthermore, the pipe inner surface develops a rough, porous interface due to long-term corrosion and scaling, exacerbating sediment adhesion and flow turbulence. This environment also leads to significant variations in corrosion rates and water quality deterioration across different pipe sections.
The unstructured environment and turbid water within water supply and drainage pipelines result from the combined effects of multiple factors. Ensuring efficient operation and maintenance is crucial for safeguarding the operational efficiency of water supply and drainage systems. 3D environment reconstruction technology provides robust technical support for pipeline maintenance. It enables the collection and precise processing of extensive data under complex conditions such as low illumination, turbid water, and full-water-pressure environments, thereby achieving 3D pipeline reconstruction. This technology facilitates accurate identification of pipeline defects, enhancing the efficiency and precision of pipeline operation and maintenance.
3. 3D Reconstruction Technology in Unstructured Turbid Water Environments
3D environment reconstruction technology consists of three main stages: image preprocessing, image matching, and 3D reconstruction. These stages involve techniques such as high-definition imaging in turbid water, image feature recognition and matching, and the actual 3D reconstruction process. High-definition imaging in turbid water utilizes image restoration algorithms to overcome the challenges of poor visibility in turbid water, producing relatively clear raw image data. Next, feature recognition and matching techniques extract key points and their coordinates from the images. During the reconstruction stage, this data is used to convert two-dimensional image information into a 3D model, accurately representing the internal morphology and defect distribution of pipelines.
3.1. Turbid Water Imaging Technology
Turbidity in water supply and drainage pipelines can lead to image degradation, including blurring, color distortion, and decreased contrast in optical sensor data. This reduction in image quality can negatively impact image feature recognition, matching, and pipeline 3D reconstruction processes. Consequently, it is essential to explore methods for utilizing optical imaging technology to improve image clarity in turbid water conditions.
3.1.1. Polarization Imaging Technology in Turbid Water
Polarization imaging technology is an advanced underwater imaging method that leverages the distinct polarization properties of target illumination and background scattered light in submerged environments. By applying specialized algorithms, these components are distinguished and separated, effectively reducing background scattering and facilitating the accurate reconstruction of target images. The polarization imaging process is demonstrated in Figure 2.
He 3. proposed an optimization method based on simulated annealing algorithms that simultaneously considers image contrast and maximizes information entropy to identify optimal polarization combinations, ensuring generated images exhibit clearer visual details. Han et al. [4] constructed an underwater polarization imaging method based on Mueller matrices, achieving clear imaging of multi-material targets in underwater scenes. Hu et al. [5] combined low-rank sparse matrix decomposition with polarization de-scattering techniques, proposing a novel underwater non-uniform light field image restoration method based on polarization imaging technology to achieve underwater image sharpening and illumination uniformity. Xu et al. [6] proposed a turbid underwater polarization image enhancement method combining frequency-domain processing with polarization state preservation, exploiting differences in spectral distribution between target objects and scattering media. Peng et al. [7] introduced an image restoration method for turbid water environments integrating polarization imaging and homomorphic filtering, effectively suppressing backscattered light to enhance target feature clarity. Liu et al. [8] proposed acquiring clear images of objects in turbid water with complete polarization state information using a Stokes camera. Qian et al. [9] combined circular polarization differential imaging with image frequency-domain filtering to achieve image restoration of highly reflective polarized light targets in turbid water. The before-and-after comparison images of the aforementioned polarization-based turbid water imaging methods are shown in Figure 3.
3.1.2. Single-Pixel Imaging Technology in Turbid Water
Single-pixel imaging (SPI) is an innovative imaging technique that utilizes single-pixel detectors in place of conventional multi-pixel sensors. It employs spatial light modulators to deliver dynamic or structured illumination to the subject, enabling the reconstruction of images. A schematic diagram illustrating the single-pixel imaging process is provided in Figure 4.
Xin et al. [10] proposed a Hadamard single-pixel imaging (HSI) system that demonstrates exceptional image resolution and anti-scattering capabilities in turbid water environments. Gu [11] introduced a computational framework for turbid underwater single-pixel imaging, employing polynomial regression fitting and enhanced feature data correction to obtain rectified data, ultimately achieving high-contrast image restoration. Su [12] proposed a differential single-pixel imaging scheme for turbid media that effectively suppresses noise and enhances image contrast. Figure 5 illustrates the before-and-after comparison images from the two single-pixel imaging approaches.
3.1.3. Deep Learning-Based Imaging Technology in Turbid Water
Deep learning-based underwater image enhancement techniques provide advanced performance and adaptability. These approaches learn image features from extensive datasets to automatically refine and optimize image quality.
Eunpil et al. [13] designed an underwater image enhancement network capable of extracting local and global features from murky underwater images, demonstrating excellent performance in removing blur and restoring color in real underwater images. Zhang [14] proposed a network model based on an improved Shallow-UWnet, effectively enhancing the visual quality of murky underwater images by combining multi-scale weighted features with an attention mechanism. Zhou et al. [15] introduced the Underwater Loop Enhancement Network (ULENet), incorporating a novel recurrent enhancement architecture and a new underwater visual perception loss function. Yan [16] proposed an underwater optical image enhancement method based on multi-branch convolutional neural networks to address strong scattering in dynamic turbid scenes. Additionally, an underwater optical image enhancement approach utilizing color balancing and brightness compensation was employed to overcome the limitation of unstable prior knowledge in non-uniformly lit environments. Wang et al. [17] enhanced the DehazeFormer network by incorporating a histogram equalization pre-enhancement module, an attention fusion module, and a hybrid loss function. Deep learning-based imaging methods utilize before-and-after comparison images as shown in Figure 6.
3.1.4. Comparative Analysis
Table 1 presents an analysis of the advantages and disadvantages associated with three turbid water imaging technologies. Polarization turbid water imaging technology is relatively well-developed, with current research primarily aimed at optimizing underwater polarization defogging models to suppress backscattered light, thereby achieving high-definition imaging in complex environments. These environments often involve materials with special properties, such as multi-material surfaces, highly reflective polarized light, or non-uniform lighting conditions. An important area of ongoing research is to enhance processing speed through parameter adjustments. However, the effectiveness of this technology can be affected by different materials and environmental conditions that influence the reflective properties of target surfaces, which limits its overall applicability.
Pixel turbid water imaging technology offers advantages such as resistance to turbulence and low backscattering, making it theoretically suitable for imaging under low-light or extremely low-light conditions. Currently, research in this area remains limited, focusing mainly on imaging in highly turbid water bodies, development of new evaluation metrics, and rapid algorithm optimization. The imaging performance in highly turbid waters still requires improvement, and presently, only two-dimensional grayscale images can be produced.
Deep learning-based turbid water imaging technology demonstrates strong performance in terms of image enhancement and adaptability. The main research directions include improving image quality metrics and increasing algorithm processing speeds.
3.2. Image Feature Recognition and Matching Technology
Image feature recognition and matching are essential components in the 3D reconstruction pipeline. By identifying stable and distinctive features within images, a dependable basis is established for image matching, camera pose estimation, and point cloud creation. Ensuring precise feature recognition and matching is vital for enhancing the spatial accuracy and level of detail in structured 3D models.
3.2.1. Image Feature Recognition
Currently, algorithms such as ORB, SURF, and SIFT are used for image feature extraction and matching. To address the issues of weak texture information extraction capability and tendency to accumulate in texture-rich regions for feature points extracted by the ORB algorithm, Wang and Ran et al. [18,19,20]improved the algorithm using adaptive thresholding, anisotropic diffusion filtering, and an improved quad-tree algorithm, thereby enhancing image information utilization and texture feature extraction capability while mitigating the enrichment effect. Borman and Shang et al. [21,22] addressed the issue of long computation time in the ORB algorithm by proposing a combination of feature point optimization, Gaussian pyramid, and downsampling filtering methods to improve computation speed. Li et al. [23] proposed the OGIL algorithm, which builds upon the ORB algorithm by incorporating information entropy and a luminance contrast (LC) saliency detection method based on grayscale values, enabling efficient filtering of redundant information and enhancing both the speed and accuracy of feature point extraction. The SURF algorithm is another widely used approach for feature extraction. Zhang et al. [24] proposed replacing the Gaussian filter in the original algorithm with an adaptive median filter combined with a wavelet transform to better preserve edge and detail information in images. Lu et al. [25] addressed the issue of redundant features extracted by the SURF algorithm by introducing a quad-tree method to remove redundant feature points.
3.2.2. Image Feature Matching
Optimization of feature matching has primarily focused on improving the RANSAC and PROSAC algorithms to enhance matching accuracy, improve algorithm efficiency, and reduce mismatches. To improve matching accuracy and enhance algorithm efficiency, techniques such as hash indexes [26] and low-variance filtering [27] have been employed to reduce feature dimensions and computational complexity, thereby enhancing both matching accuracy and algorithm efficiency. Using the grid motion estimation (GMS) method to screen out mismatches can further optimize matching results. Combining the GMS method with the K-D tree search method [24] and the K-D tree feature structure set method with an improved nearest neighbor query mechanism [28] can reduce computational complexity and significantly improve matching accuracy. Combining the GMS algorithm with the PROSAC algorithm can reduce computation time while maintaining matching accuracy [29] Optimizing the RANSAC algorithm can reduce mismatches between feature points in images. For example, identifying mismatched point pairs to select the optimal iteration range can reduce the number of iterations [25]. The MAGSAC++ algorithm [30], which introduces new stopping criteria, and combining machine learning [31] can effectively reduce data resampling, accurately eliminate mismatched points, and thus improve matching efficiency and accuracy. Additionally, the robustness of feature matching is also a valuable area of research. Ying et al. [32] proposed LIM, a lightweight image local feature matching network that reduces model complexity while enhancing robustness in image matching. incorporating dynamic Bayesian networks [20] and optimizing RANSAC using a local estimation method based on triangular irregular networks [33] also enables the algorithm to significantly improve its robustness and generalization capabilities while maintaining matching accuracy. Figure 7 shows a comparison of the image matching performance of some improved image matching algorithms.
3.2.3. Comparative Analysis
Research on image feature recognition and extraction techniques primarily aims to enhance the utilization of image information, improve the efficiency of feature extraction processes, increase the accuracy of feature matching in complex scenes, and strengthen the reliability, real-time performance, and robustness of algorithms. By refining algorithms to prevent the clustering of extracted feature points within highly textured areas, feature points are distributed more evenly across the image. Additionally, advancements in processing edge details enable more precise characterization of local image features. Simplifying algorithm complexity can also substantially reduce computational time while maintaining high accuracy in feature point extraction and matching, thereby improving overall efficiency and supporting real-time applications. Moreover, during the development of these methods, efforts are made to optimize the robustness and generalizability of algorithms to perform effectively in diverse and complex scenarios.
However, current image feature recognition and extraction technologies face certain challenges. For instance, the parameters for feature point detection and the internal settings for mismatch removal often require manual adjustment based on specific circumstances, indicating a need for higher levels of automation. Furthermore, the robustness of these algorithms needs enhancement to reliably operate in complex environments, such as scenarios involving multiple overlapping objects, cluttered backgrounds, variable textures, and changing lighting conditions. Improving accuracy in feature point detection and matching under such conditions remains an ongoing focus for research and development.
3.3. 3D Reconstruction Technology for Water Pipelines
3D reconstruction technology facilitates the visualization of water supply and drainage pipelines in three dimensions, offering an effective means to identify internal defects. Presently, the main 3D reconstruction methods utilized in this field include optical sensor technology, structured light sensor technology, and laser sensor technology.
3.3.1. Optical Sensor Technology
An optical sensor is a device that detects ambient light to capture visual information. It employs one or more cameras to acquire images or videos from multiple angles of the surrounding environment. These images are then combined to create a comprehensive visual representation of objects or scenes. By incorporating computer vision algorithms, the system can generate 3D models that include spatial and dimensional information of the pipeline.
Ma et al. [34] proposed a low-cost monocular-based 3D reconstruction and depth measurement system for pipelines, employing projection-based methods, Delaunay triangulation, and boundary search to measure the actual dimensions of pipeline pits. Han et al. [35]proposed a Fast-MVSNet-based method for pipeline inner surface 3D reconstruction and depth prediction. By integrating ORB-SLAM3 camera pose estimation with deep learning techniques, it achieves high-precision monocular 3D reconstruction. Zhang et al. [36] proposed a pipeline 3D reconstruction method using low-cost panoramic cameras, employing Structure from Motion (SFM) and dense reconstruction techniques to effectively reconstruct texture-clear models of pipelines with varying materials. Liu et al. [37] reduced dimensional measurement errors in pipe 3D models by capturing pipe images in both directions. Shang et al. [38] proposed a detection system based on a dual-function depth camera array, achieving high-precision reconstruction in both straight and curved pipe sections. Figure 8 shows a 3D pipe model reconstructed using optical sensors.
3.3.2. Structured Light Sensor Technology
Structured light cameras determine the 3D coordinates of surface points by analyzing the deformation of projected light patterns resulting from variations in the object's surface curvature.
Structured light cameras can calculate the 3D coordinates of each point on an object's surface by capturing the deformation of light stripes caused by changes in surface curvature. Wang et al. [39] employed angle-of-incidence sudden change analysis to detect convex and concave defects, and achieved 3D reconstruction of minute defects on the inner surface of pipes using rapid triangulation of adjacent points. To enable dimensional measurement of internal pipe defects, Li [40] proposed an improved circular structured light stripe center extraction algorithm and calibration method for measuring internal surface defect dimensions. Building upon this, Wang [41] implemented sub-pixel-level center extraction along the normal using a gray-level centroid method, enhancing the speed, accuracy, and noise resistance of circular structured light center extraction on internal pipe surfaces. Figure 9 shows a 3D pipe model reconstructed using structured light.
3.3.3. Laser Sensor Technology
Laser sensor technology determines the 3D coordinates of each laser point by measuring the time it takes for the laser beam to reflect back, while utilizing the sensor's positional and angular data.
Zang Chunhua et al. [42] employed multi-station targetless laser scanning to achieve high-precision non-contact measurement of enlarged pipe diameters and pipe roundness. To address the challenge of quantifying damage defects in traditional video inspection, Li [43] automatically identified pipe damage locations and calculated parameters such as damaged area and longitudinal length by removing fractured point clouds, combined with grid-based filtering and region growing algorithms. Lai et al. [44] employed ROSA centerline extraction and topological analysis to solve high-precision 3D reconstruction for underground pipelines despite sparse, missing, and noisy point clouds. Oh et al. [45] proposed an automated method for reconstructing pipeline systems from 3D point clouds. This approach extracts cylindrical object points, estimates pipe radii, detects centerlines and orientations, and automatically reconstructs complete 3D pipeline systems containing straight pipes, elbows, and tees. Some researchers also employed sonar for pipeline 3D reconstruction. Zhou et al. [46] utilized an iterative outlier removal fitting method based on sonar point clouds to reconstruct 3D models of pipelines and sedimentation within them, successfully calculating and annotating sedimentation depths in pipeline cross-sections. Figure 10 shows a 3D pipeline model reconstructed using laser sensors and sonar.
3.3.4. Comparative Analysis
Optical sensor technology can comprehensively and intuitively display the internal structure and connection points of water supply and drainage pipelines. However, the data it generates contains a large amount of high-resolution images and videos, significantly increasing the computational load for data processing. Additionally, the complex internal structure of pipelines, including corners, low-light conditions, water flow, and steam, leads to increased image noise, loss of detail, and reduced accuracy in subsequent data processing and 3D reconstruction. The patterns generated by structured light sensors are susceptible to deformation, blurring, or even loss due to the low-light conditions and water flow inside the pipes, leading to measurement errors and making data collection difficult and reconstruction accuracy insufficient. Furthermore, structured light technology inherently has the drawback of high static accuracy but low dynamic accuracy, requiring measurements to be taken when the device is stationary, thereby limiting dynamic scanning capabilities. Optical sensor technology and structured light sensor technology have seen limited research in recent years due to their insufficient data processing speed, poor adaptability to complex environments, restricted dynamic scanning capabilities, and inadequate reconstruction accuracy. Laser scanning technology can accurately reproduce the complex geometric shape of pipelines and fully reveal internal defect details. It can also perform actual dimension measurements and efficiently detect defects inside water supply pipelines. However, laser scanning technology is affected by laser scattering caused by water inside pipelines, reducing accuracy. Additionally, the high cost of laser scanning equipment and the hardware costs required for processing large volumes of point cloud data limit its application in medium-to-small-scale projects.
4. Technical Challenges and Future Development Trends
4.1. Technical Challenges
3D reconstruction of water supply pipelines involves multiple stages, including turbid water image processing, image feature recognition and matching, and three-dimensional model construction. Although significant progress has been made in non-structured turbid water three-dimensional environmental reconstruction technology, enabling visualization and dimensional measurement of internal pipeline structural defects, the following issues and challenges remain.
4.1.1. Challenges in Turbid Water Imaging Technology
- (1)
- Poor imaging performance in turbid water
Due to suspended particles, impurities, and uneven illumination in water bodies, imaging systems struggle to capture clear images. The scattering and absorption of light by suspended matter significantly degrades image quality, particularly in low-visibility conditions where images exhibit blurring, low contrast, and excessive noise, compromising high-definition imaging performance. Furthermore, dynamic variations such as water currents and vapor fluctuations further exacerbate imaging instability. To address this challenge, optimizing image enhancement and denoising algorithms can improve image quality while reducing noise and blurring effects. Additionally, integrating technologies like deep learning enhances the imaging system's adaptability to dynamic environments, thereby effectively mitigating the impact of poor turbid water imaging on 3D reconstruction accuracy.
- (2)
- Algorithmic model deficiencies
Existing muddy water imaging algorithm optimizations are often based on improvements to different foundational models, lacking a unified standardized framework. This results in highly diverse optimization pathways. While various optimization methods achieve certain effects in specific scenarios, they generally lack systematicity and consistency. Different research teams frequently select distinct foundational algorithms as their starting points, then customize them for specific application requirements. This results in significant differences between algorithmic models. While they may satisfy needs in particular scenarios, they suffer from poor generalizability and portability.
- (3)
- Poor environmental adaptability
Variations in water conditions—such as water quality, illumination, and suspended particles—increase the complexity and diversity of turbid water environments, resulting in poor environmental adaptability of imaging systems. In turbid water bodies, dynamic changes in water quality affect light propagation, causing significant fluctuations in image brightness and contrast. Additionally, variations in illumination conditions—such as insufficient or uneven underwater light sources in highly turbid environments—further complicate image processing adaptation. Consequently, turbid water imaging algorithms struggle to maintain stability across different aquatic conditions, significantly compromising their versatility and robustness.
- (4)
- Insufficient interoperability with hardware
In current turbid water imaging technologies, algorithms are typically separated from hardware components such as optical cameras and illumination systems, failing to form a tightly integrated and collaborative system. This separation results in ineffective coordination and synergy among components during data acquisition, processing, and output, leading to significant coordination challenges in practical applications. For instance, poor matching between camera imaging quality and algorithm processing capabilities may cause the resulting images to fall short of high-definition imaging requirements. Simultaneously, the lighting patterns of illumination systems and the algorithms' limited adaptability to lighting conditions result in unstable image quality, thereby compromising algorithmic accuracy and stability. Furthermore, the lack of seamless integration between hardware and algorithms leads to inefficient post-processing of acquired images, causing significant delays.
4.1.2. Challenges in 3D Environment Reconstruction Technology
- (1)
- Computational burden and data processing complexity
One of the core challenges in 3D environment reconstruction technology is the high computational burden of data processing. Whether using optical sensors, structured light sensors, or laser sensors, massive amounts of image or point cloud data must be processed. The enormous volume of data generated by these sensors demands hardware with powerful computational capabilities and highly efficient processing algorithms. Simultaneously, complex environmental conditions—such as intricate internal pipe structures, sewage flow, and steam—further exacerbate data processing difficulties, leading to increased computational demands.
- (2)
- Poor environmental adaptability and accuracy issues
3D reconstruction technology exhibits poor adaptability in complex environments, with measurement accuracy significantly affected by environmental factors. Elements such as low light levels, water flow, and steam within pipelines can interfere with sensor data acquisition, leading to measurement errors. Even when employing high-precision sensors, maintaining stable performance remains challenging in the dynamic or irregular conditions of complex pipeline interiors. Consequently, enhancing the system's adaptability to complex environments while ensuring accuracy under such conditions represents a major technical challenge.
- (3)
- Lack of real-time capability
3D reconstruction technology also faces challenges related to insufficient real-time performance. For structured light sensors, dynamic scanning typically leads to reduced data accuracy, requiring the device to remain stationary to ensure high-precision measurements. This poses a significant challenge for real-time monitoring in rapidly changing environments. While laser sensors can deliver high accuracy during dynamic movement, the massive volume of point cloud data results in slower processing and transmission speeds, limiting their real-time applicability in practical scenarios. Therefore, enhancing real-time performance throughout the data acquisition to environmental reconstruction process and minimizing dynamic scanning errors represent critical challenges that future technological advancements must address.
4.2. Future Development Trends
In the future, with continuous technological advancements and growing demands for pipeline operation and maintenance, 3D reconstruction technology for water supply and drainage pipelines will undergo further development and optimization across multiple dimensions. To address current technical challenges, future research will focus on optimizing computational complexity and accuracy of algorithms, enhancing system stability, adaptability, and real-time performance, while simultaneously optimizing hardware configurations to reduce costs and meet broader application requirements.
4.2.1. Future Development Trends of Turbid Water Imaging Technology
- (1)
- Enhanced Turbidity Imaging Technology Based on the Integration of Physical Models and Deep Learning Models
By integrating physical models with deep learning models, higher-quality image enhancement can be achieved in complex aquatic environments. Physical models mitigate the effects of light scattering and absorption in water on images, while deep learning leverages large datasets for image denoising and enhancement. This fusion effectively mitigates issues like image blurring, noise, and low contrast caused by suspended solids and steam, enhancing model interpretability and imaging quality. The method adapts to diverse water conditions, particularly improving image enhancement in low-visibility or high-turbidity environments, demonstrating superior generalization capabilities.
- (2)
- Focus Optimization for Turbid Water Imaging Algorithms
Currently, research on turbidity imaging technology employs a wide array of algorithmic models, lacking sustained optimization and refinement of one or several core algorithms. Future development trends will focus on concentrating efforts to enhance several existing fundamental algorithms. By continuously refining algorithms with strong foundational capabilities, we can specifically improve their accuracy and adaptability, thereby achieving more consistent and reliable imaging results in practical applications. Through the sustained improvement of specific algorithms, we can effectively address the performance instability caused by the current fragmented algorithmic ecosystem, ensuring stable and consistent imaging quality across diverse environments.
- (3)
- Developing an Integrated System for Turbid Water Imaging
The seamless integration of hardware and algorithms ensures smooth and efficient image acquisition and processing. Through deep hardware-software synergy and technologies like edge computing and distributed deployment, integrated imaging devices combining lighting equipment, algorithm processing, and image output can automatically adjust illumination based on water conditions. This enables local processing of turbid images, reducing transmission delays to rapidly output enhanced high-definition images and improve real-time performance. This integrated system effectively enhances the stability and accuracy of turbid water imaging while maintaining high-quality imaging in dynamically changing environments.
4.2.2. Future Development Trends of 3D Environment Reconstruction Technology
- (1)
- Lightweight and High-Performance 3D Reconstruction Algorithms
During the process of 3D environment reconstruction, lightweight CNN architectures such as MobileNet and EfficientNet are employed for the image feature recognition and matching stage. These frameworks enable the extraction of high-quality image features with low computational complexity while reducing memory and computational overhead, making them suitable for embedded and mobile device applications. For the point cloud processing step, deep learning models based on point clouds, such as PointNet++, significantly reduce data transmission and storage burdens through efficient processing and compression of point cloud data. Furthermore, sparse point cloud techniques minimize unnecessary computations, enabling real-time 3D reconstruction on low-power devices. Applying and refining these models addresses the computational burden and poor real-time performance of traditional 3D reconstruction algorithms. They maintain efficient and accurate reconstruction capabilities even in complex scenes, making them suitable for real-time monitoring in dynamic environments.
- (2)
- Lightweight, Modular Sensor Applications
With advances in sensor technology, lightweight and modular sensors will become core components of future 3D reconstruction systems. Currently, the hardware costs for 3D reconstruction equipment and sensors remain prohibitively high. Research into compact, lightweight, low-cost, high-performance sensors can reduce overall system construction and maintenance expenses while delivering low power consumption and high-precision measurement capabilities. Developing modular sensors that facilitate easy installation and removal simplifies equipment upgrades and maintenance. Such sensors also enable flexible configuration tailored to diverse project requirements, offering more cost-effective operation and maintenance solutions that accelerate the adoption of intelligent maintenance equipment.
5. Conclusions
This paper provides a comprehensive review of the research progress, technical challenges, and emerging trends in 3D environmental reconstruction technology for water supply and drainage networks in unstructured turbid water environments. The complex and unstructured nature of turbid water environments, resulting from long-term network operation, presents significant challenges to traditional operation and maintenance methods. However, 3D reconstruction technology offers promising solutions through breakthroughs in three key areas: turbid water imaging, image feature recognition and matching, and 3D model reconstruction. Turbid water imaging technology is effective in preprocessing turbid water images, while image feature recognition and matching technologies improve the efficiency and accuracy of image alignment. Additionally, 3D model reconstruction enables high-precision modeling of the internal structures of water supply and drainage networks. Despite these advancements, current technologies require further development to enhance adaptability, stability, and real-time performance in the complex environments of water networks. Future research should prioritize these aspects to optimize technical performance and facilitate the broader application of 3D reconstruction technology in water supply and drainage networks. This progress will enable the intelligent operation, maintenance, and management of these systems, ensuring their safe and reliable functioning.
Author Contributions
Writing—original draft preparation, Zhe Ying; writing—review and editing, Hongliang Yu, Jian Guo, Weikun Wang, Yifan Liu, Yumo Zhu; funding acquisition, Jian Guo. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Science and Technology Bureau of Jiashan County, Zhejiang Province, China, and Yiwu Drainage Co., Ltd., Zhejiang Province, China, grant number 2024E22 and ZJUYRD20241201.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Acknowledgments
This review has been supported by Future Water Laboratory, Innovation Center of Yangtze River Delta, Zhejiang University.The authors have reviewed and edited the output and take full responsibility for the content of this publication.”
Conflicts of Interest
The authors declare no conflicts of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
References
- M G, M; Saber, N; Georgios, G; et al. A noise-based high-resolution time-reversal method for acoustic defect localization in water pipes. The Journal of the Acoustical Society of America 2022, 152, 3373–3373. [Google Scholar] [CrossRef]
- Carrie, A. Digging into Exposure Disparities: Mapping Lead Service Lines in New York City. Environmental health perspectives 2023, 131, 114001–114001. [Google Scholar] [CrossRef]
- He, W; Zhao, C; Wang, W. Single-shot polarization descattering imaging in turbid water with high-entropy based on simulated annealing optimization. Optics and Laser Technology 2025, 192, 113522–113522. [Google Scholar] [CrossRef]
- Han, P; Fan, Y; Yang, B; et al. Underwater Polarization Imaging Method Based on Mueller Matrix. Journal of Underwater Unmanned Systems 2023, 31, 624–632. [Google Scholar] [CrossRef]
- Hu, H; Fei, X; Shen, L; et al. Underwater Image Restoration of Non-uniform Illumination Based on Polarization Imaging. Acta Optica Sinica 2025, 45, 383–394. [Google Scholar] [CrossRef]
- Xu, J; Zhao, J; Li, X; et al. Polarization imaging technique for turbid underwater environments based on spectral information. Acta Optica Sinica 2023, 43, 1811001-1811001-9. [Google Scholar] [CrossRef]
- Peng, E; Liu, C; Zhao, H. Restoration of Turbid Underwater Images of Cobalt Crusts Using Combined Homomorphic Filtering and a Polarization Imaging System. Sensors (Basel, Switzerland) 2025, 25, 1088. [Google Scholar] [CrossRef]
- Liu, P; Zhai, Y; Zhu, H; et al. An Underwater Polarization Imaging Technique Based on the Construction and Decomposition of the Low-Rank and Sparse Matrix in Stokes Space for Polarization State Imaging. Sensors 2025, 25, 704–704. [Google Scholar] [CrossRef]
- Cheng, Q; Wang, Y; Liu, Y. Image Restoration of Highly Reflective Polarization Targets in Turbid Media Based on Circularly Polarized Light. IEEE Access; 2024. [Google Scholar] [CrossRef]
- Xin, Y; Yang, L; Xinyue, M; et al. Imaging in turbid water based on a Hadamard single-pixel imaging system. Optics express 2021, 29, 12010–12023. [Google Scholar] [CrossRef]
- Gu, L. Research on Single-Pixel Imaging of Turbid Underwater Objects Based on Feature Enhancement [D]. In Hefei University of Technology; 2023. [Google Scholar] [CrossRef]
- Su, X. Single-Pixel Imaging Through Turbid Media [D]. In Liaoning University; 2023. [Google Scholar] [CrossRef]
- Park, E; Jo, E; Sim, J Y. Underwater image enhancement using realistic dataset with turbidity and color distortion[C]//2022 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA ASC). IEEE 2022, 804–808. [Google Scholar] [CrossRef]
- Zhang, W; Zhang, H; Niu, Z; et al. An Image Enhancement Method for Turbid Water Bodies Based on an Improved Shallow-UWnet. Journal of Optoelectronics·Laser 2025, 36, 167–175. [Google Scholar] [CrossRef]
- Wen-Hui, Z; Deng-Ming, Z; Min, S; et al. Deep images enhancement for turbid underwater images based on unsupervised learning. Computers and Electronics in Agriculture 2022, 202. [Google Scholar] [CrossRef]
- Yan, X. Research on Underwater Optical Image Enhancement Methods Based on Image Fusion and Deep Network Models [D]. In Dalian Maritime University; 2023. [Google Scholar] [CrossRef]
- Wang, Q; Zhong, X; Lu, D; et al. ITW-DehazeFormer: Imaging through Turbid Water Using Improved DehazeFormer[C]//ICASSP 2025-2025 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). IEEE 2025, 1–5. [Google Scholar] [CrossRef]
- Wang, W; Xiong, Z; Liu, Z. ORB Feature Uniform Distribution Algorithm Integrating Quadtree and Adaptive Thresholding. Journal of Physics: Conference Series 2025, 3024, 012016–012016. [Google Scholar] [CrossRef]
- Wang, X; Ding, Z; Qiu, Z; et al. Research on Feature Detection and Matching Based on an Improved ORB Algorithm. Computer and Digital Engineering 2024, 52, 1854–1858. [Google Scholar] [CrossRef]
- Ran, N; Fan, C; Zhang, S; et al. An Improved Image Processing Algorithm for ORB Feature Point Extraction and Matching. Journal of Electronic Measurement and Instrumentation 2025, 39, 213–224. [Google Scholar] [CrossRef]
- Borman, I R; Harjoko, A; Wahyono. Improved ORB Algorithm Through Feature Point Optimization and Gaussian Pyramid. International Journal of Advanced Computer Science & Applications (IJACSA) 2024, 15. [Google Scholar] [CrossRef]
- Shang, M; Wang, K. Image registration algorithm based on improved multiscale ORB. Electro-Optics and Control 2024, 31, 42–46+70. [Google Scholar] [CrossRef]
- Li, B; Wang, J; Chen, J; et al. OGIL: An Improved ORB Algorithm Based on GMS, Information Entropy and LC[C]//2023 35th Chinese Control and Decision Conference (CCDC). IEEE 2023, 1164–1169. [Google Scholar] [CrossRef]
- Zhang, L; Shi, Y; Lu, W; et al. Three-dimensional reconstruction technique based on SURF-OKG feature matching. Optical Precision Engineering 2024, 32, 915–929. [Google Scholar] [CrossRef]
- Lu, H; Yu, Y; Sun, Y. Research on Image Matching Algorithms Based on SURF and Improved RANSAC. Journal of Hangzhou Dianzi University (Natural Science Edition) 2025, 45, 36–43. [Google Scholar] [CrossRef]
- Cao, M; Jiang, H; Zhao, H. Hash Indexing-Based Image Matching for 3D Reconstruction. Applied Sciences 2023, 13, 4518. [Google Scholar] [CrossRef]
- Guo, D. Research on 3D Reconstruction Based on Monocular Vision [D]. In Harbin Engineering University; 2024. [Google Scholar] [CrossRef]
- Wang, Z; Zhang, S; Ning, C; et al. An Image Feature Point Matching Algorithm Based on Improved SURF. Hebei Journal of Industrial Science and Technology 2024, 41, 418–425. [Google Scholar] [CrossRef]
- Peng, S; Yan, Q; Wu, T. An improved GMS image feature matching algorithm based on BEBLID descriptor[C]//Second International Conference on Optics and Image Processing (ICOIP 2022). SPIE 2022, 12328, 309–314. [Google Scholar] [CrossRef]
- Zhu, D; Wei, J; Liu, S. Visual SLAM Localization Algorithm with Improved ORB Feature Matching. Advances in Lasers and Optoelectronics 2025, 62, 168–175. [Google Scholar] [CrossRef]
- Li, Z; Su, H; Jiang, C; et al. Machine Learning-Enhanced ORB Matching Using EfficientPS for Error Reduction. Applied Mathematics and Nonlinear Sciences 2024, 9. [Google Scholar] [CrossRef]
- Ying, S; Zhao, J; Li, G; et al. LIM: Lightweight Image Local Feature Matching. Journal of Imaging 2025, 11, 164. [Google Scholar] [CrossRef] [PubMed]
- Jia, Y; Deng, W; Yin, Q; et al. An Augmented Reality Image Matching Method Based on Improved SURF. Computer Technology and Development 2024, 34, 59–64. [Google Scholar] [CrossRef]
- Ma, D; Fang, H; Wang, N; et al. A low-cost 3D reconstruction and measurement system based on structure-from-motion (SFM) and multi-view stereo (MVS) for sewer pipelines. Tunnelling and Underground Space Technology 2023, 141, 105345. [Google Scholar] [CrossRef]
- Han, Q; Li, C; Su, C; et al. Pipeline Inner Surface 3D Reconstruction and Depth Prediction Based on Fast-MVSNet for Intelligent Sewer Robot Vision[C]//2023 China Automation Congress (CAC). IEEE 2023, 8261–8266. [Google Scholar] [CrossRef]
- Zhang, X; Zhao, P; Hu, Q; et al. A 3D reconstruction pipeline of urban drainage pipes based on Multiview image matching using low-cost panoramic video cameras. Water 2019, 11, 2101. [Google Scholar] [CrossRef]
- Liu, R; Shao, Z; Sun, Q; et al. Defect detection and 3d reconstruction of complex urban underground pipeline scenes for sewer robots. Sensors (Basel, Switzerland) 2024, 24, 7557. [Google Scholar] [CrossRef]
- Shang, Z; Shen, Z. Dual-function depth camera array for inline 3D reconstruction of complex pipelines. Automation in Construction 2023, 152, 104893. [Google Scholar] [CrossRef]
- Wang, Y; Jin, C; Zhang, Y. Pipe Defect Detection and Reconstruction Based on 3D Points Acquired by the Circular Structured Light Vision. Advances in Mechanical Engineering 2019, 5, 670487–670487. [Google Scholar] [CrossRef]
- Li, K. Research on Machine Vision-Based Detection Methods for Pipeline Inner Surface Defects [D]. In Inner Mongolia University of Science and Technology; 2019. [Google Scholar] [CrossRef]
- Wang, X. Design of a Structured Light Visual Inspection System for Pipeline Inner Surfaces. Doctoral Dissertation;Inner Mongolia University of Science and Technology, 2020. [Google Scholar] [CrossRef]
- Zang, C; Wang, H; Gao, X; et al. Measurement Method for Diameter and Roundness of Expanded Pipes Based on Laser Line Scan 3D Reconstruction. Development and Innovation of Electromechanical Products 2021, 34, 79–81. [Google Scholar] [CrossRef]
- Li, Y; Cai, Y; Dong, S; et al. Quantitative Detection Technology for Pipeline Damage Based on Laser Point Cloud Data. Bulletin of Surveying and Mapping 2024, 120–125. [Google Scholar] [CrossRef]
- Lai, Q; Xin, Q; Tian, Y; et al. Structural Analysis and 3D Reconstruction of Underground Pipeline Systems Based on LiDAR Point Clouds. Remote Sensing 2025, 17, 341. [Google Scholar] [CrossRef]
- Oh, I; Ko, K H. Automated recognition of 3D pipelines from point clouds. The Visual Computer 2021, 37, 1385–1400. [Google Scholar] [CrossRef]
- Zhou, Y; Chen, H; Gao, L; et al. An automatic method of siltation depth detection and 3D modeling in water-filled sewer pipelines based on sonar point clouds. Measurement 2025, 242, 115954. [Google Scholar] [CrossRef]
Figure 1.
Water supply pipe structural and non-structured cross-section display.
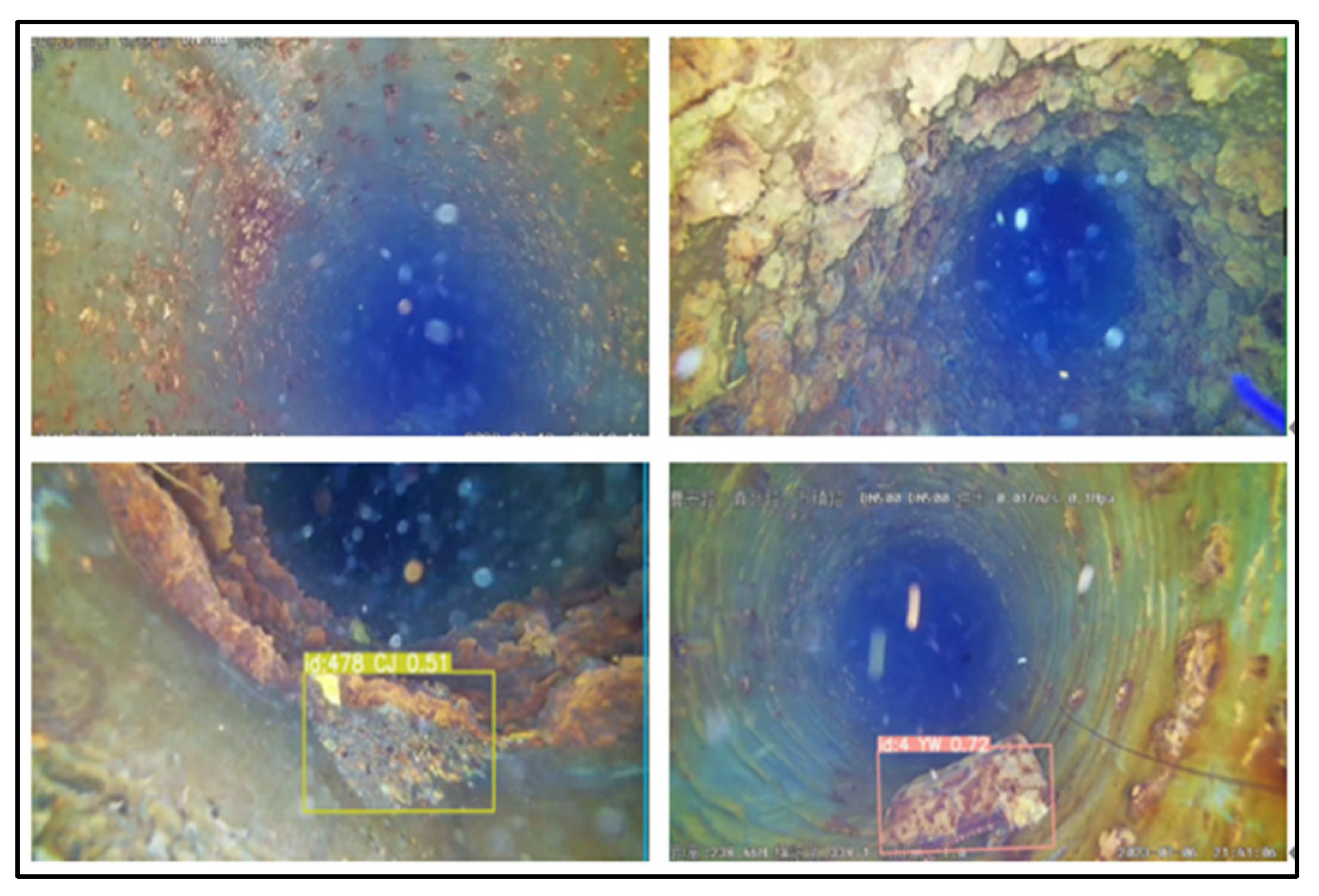
Figure 2.
Underwater polarized scattering imaging model
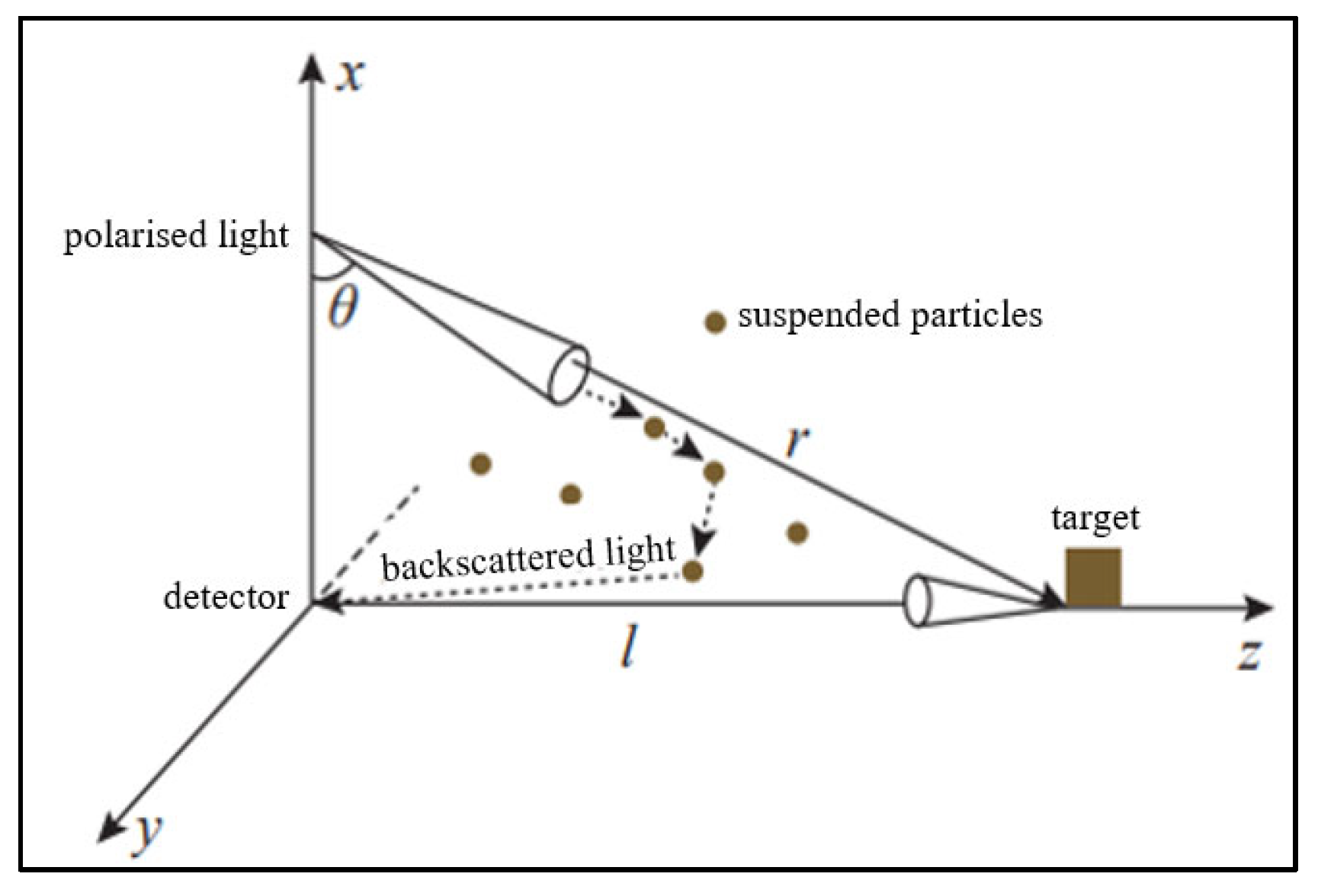
Figure 3.
Comparison images before and after using the polarized turbidity imaging method. (a) He’s improved effect; (b) Han’s improved effect; (c)Hu’s improved effect; (d)Xu’s improved effect; (e)Liu’s improved effect; (f)Cheng’s improved effect.
Figure 3.
Comparison images before and after using the polarized turbidity imaging method. (a) He’s improved effect; (b) Han’s improved effect; (c)Hu’s improved effect; (d)Xu’s improved effect; (e)Liu’s improved effect; (f)Cheng’s improved effect.
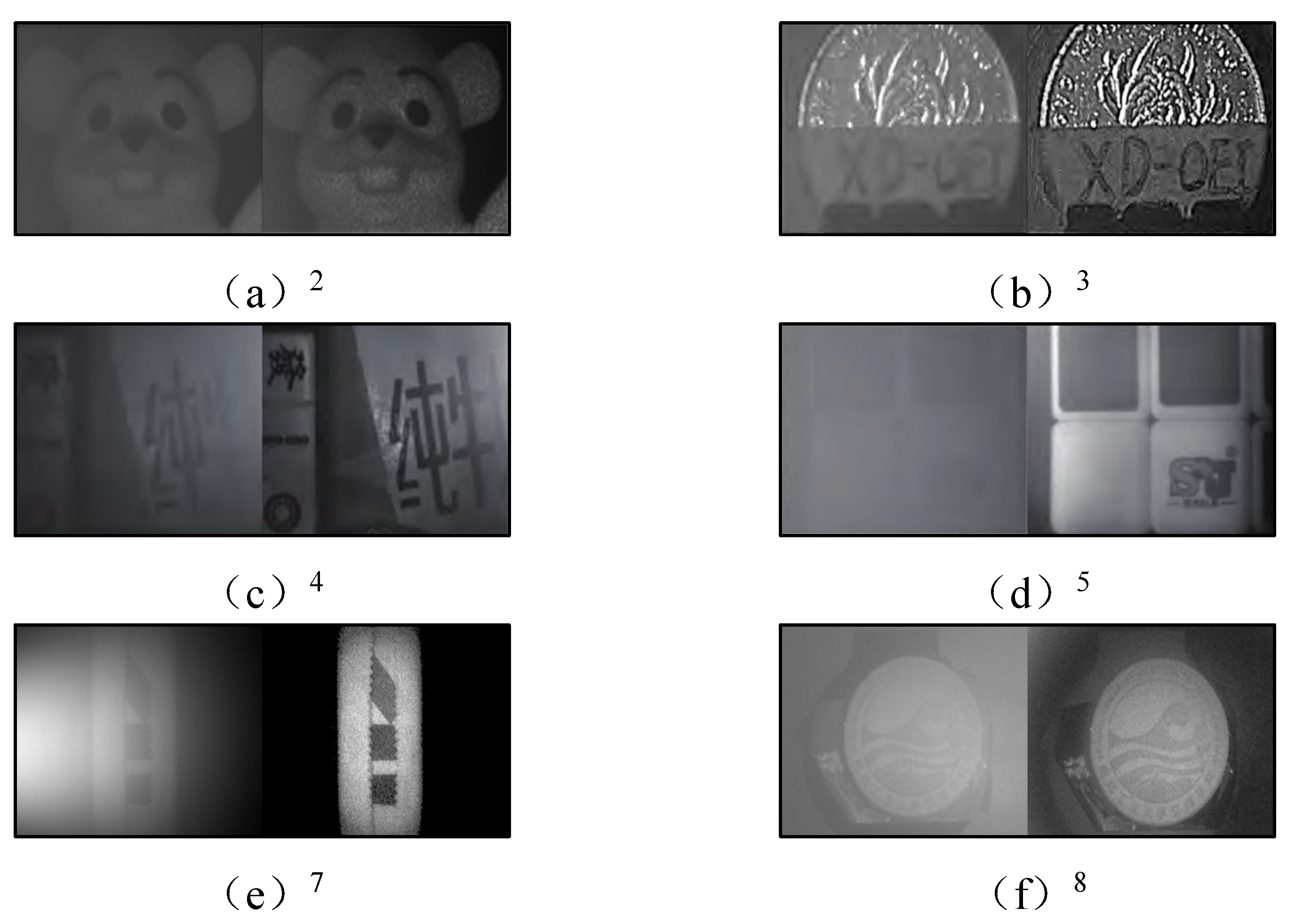
Figure 4.
Schematic diagram of single-pixel imaging process
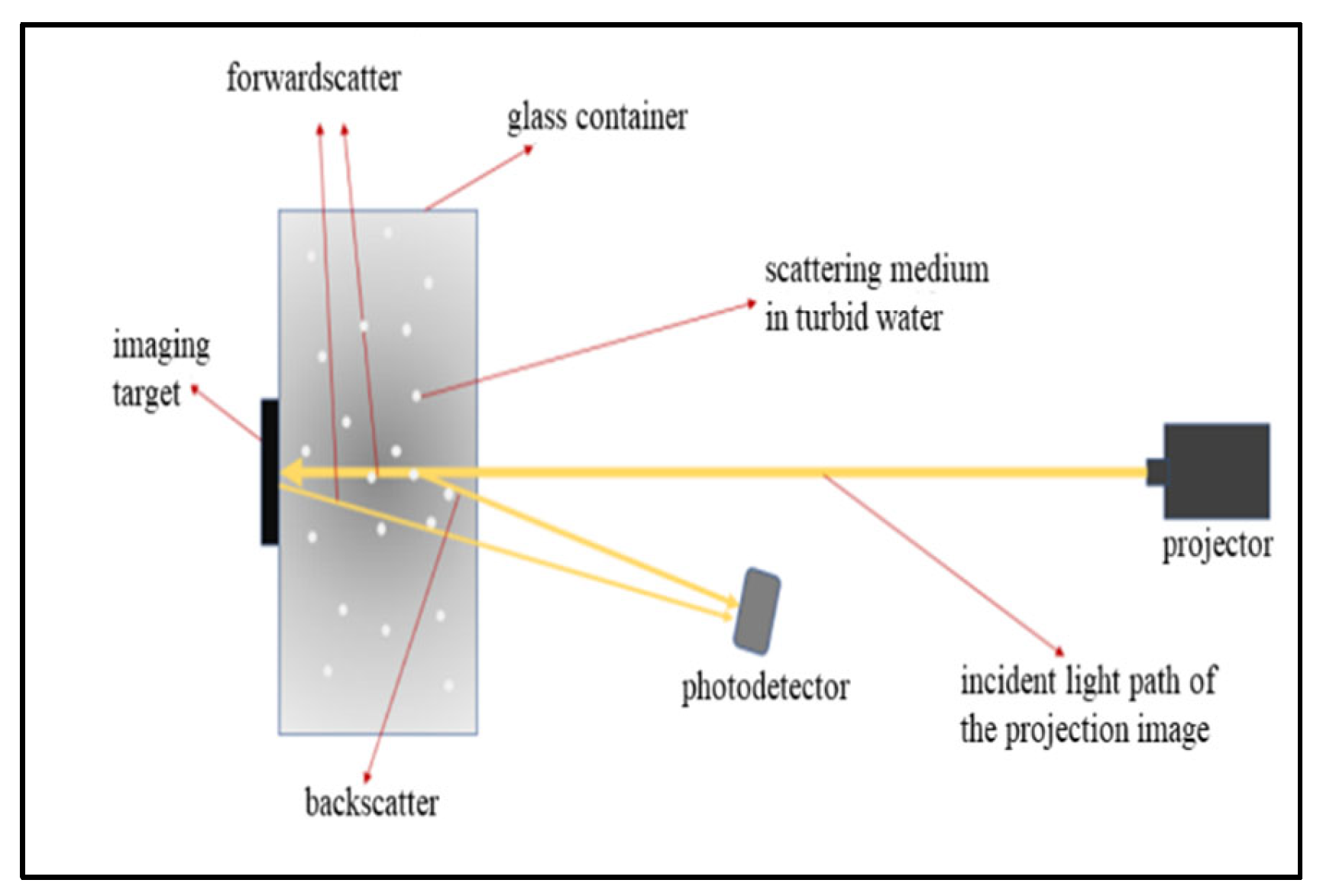
Figure 5.
Comparison of before and after using the single-pixel imaging method. (a)Gu’s improved effect; (b)Su’s improved effect.
Figure 5.
Comparison of before and after using the single-pixel imaging method. (a)Gu’s improved effect; (b)Su’s improved effect.
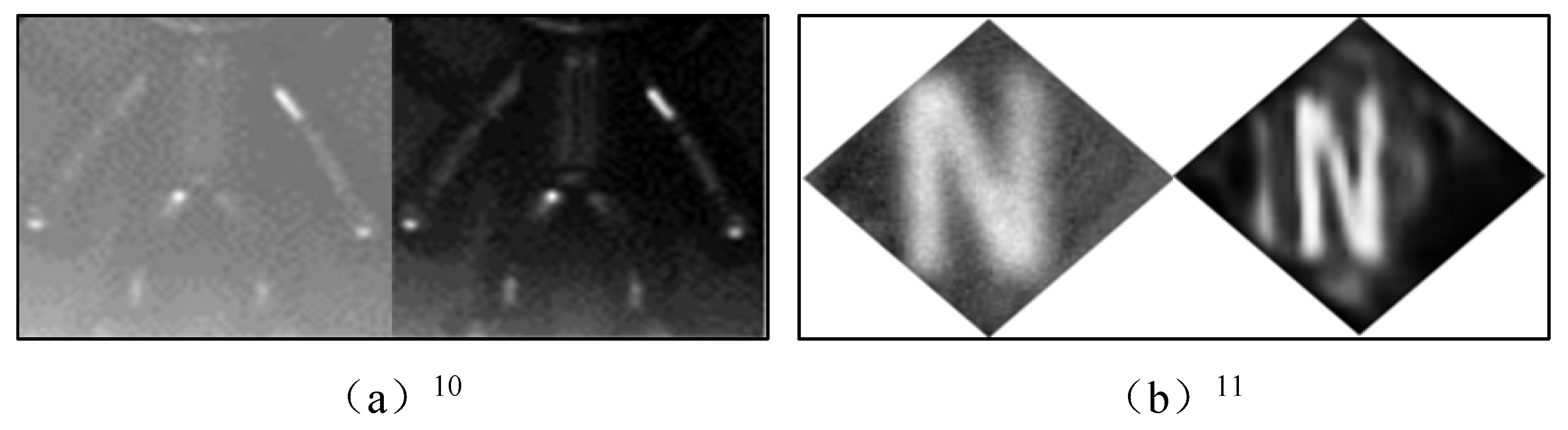
Figure 6.
Comparison of images before and after using a deep learning-based imaging method. (a)Zhang’s improved effect; (b)Zhou’s improved effect; (c)Yan’s improved effect; (d)Wang’s improved effect.
Figure 6.
Comparison of images before and after using a deep learning-based imaging method. (a)Zhang’s improved effect; (b)Zhou’s improved effect; (c)Yan’s improved effect; (d)Wang’s improved effect.
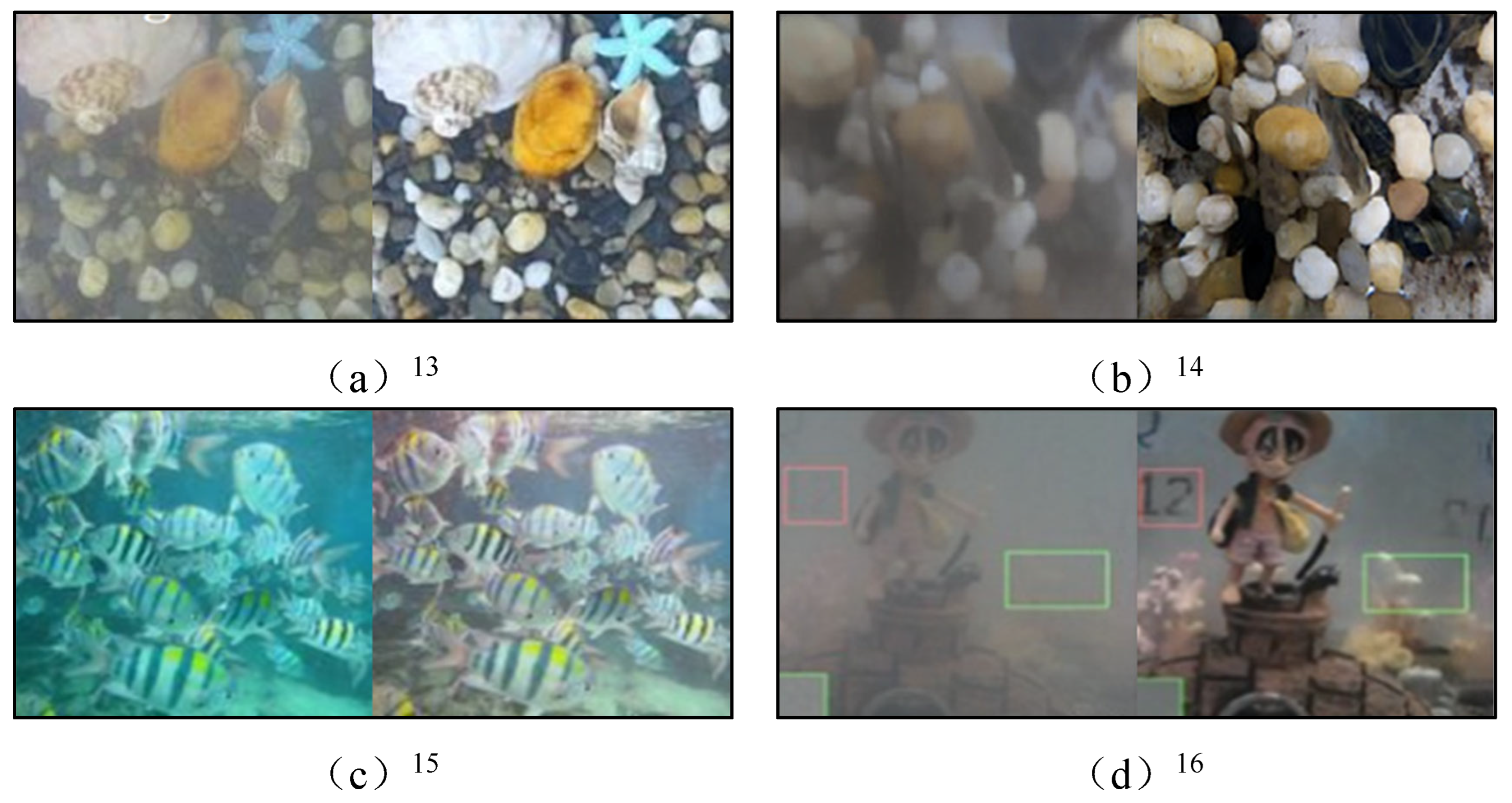
Figure 7.
Comparison of image matching algorithm effects before and after improvement. (a)Wang’s improved effect; (b)Zhang’s improved effect; (c)Lu’s improved effect.
Figure 7.
Comparison of image matching algorithm effects before and after improvement. (a)Wang’s improved effect; (b)Zhang’s improved effect; (c)Lu’s improved effect.
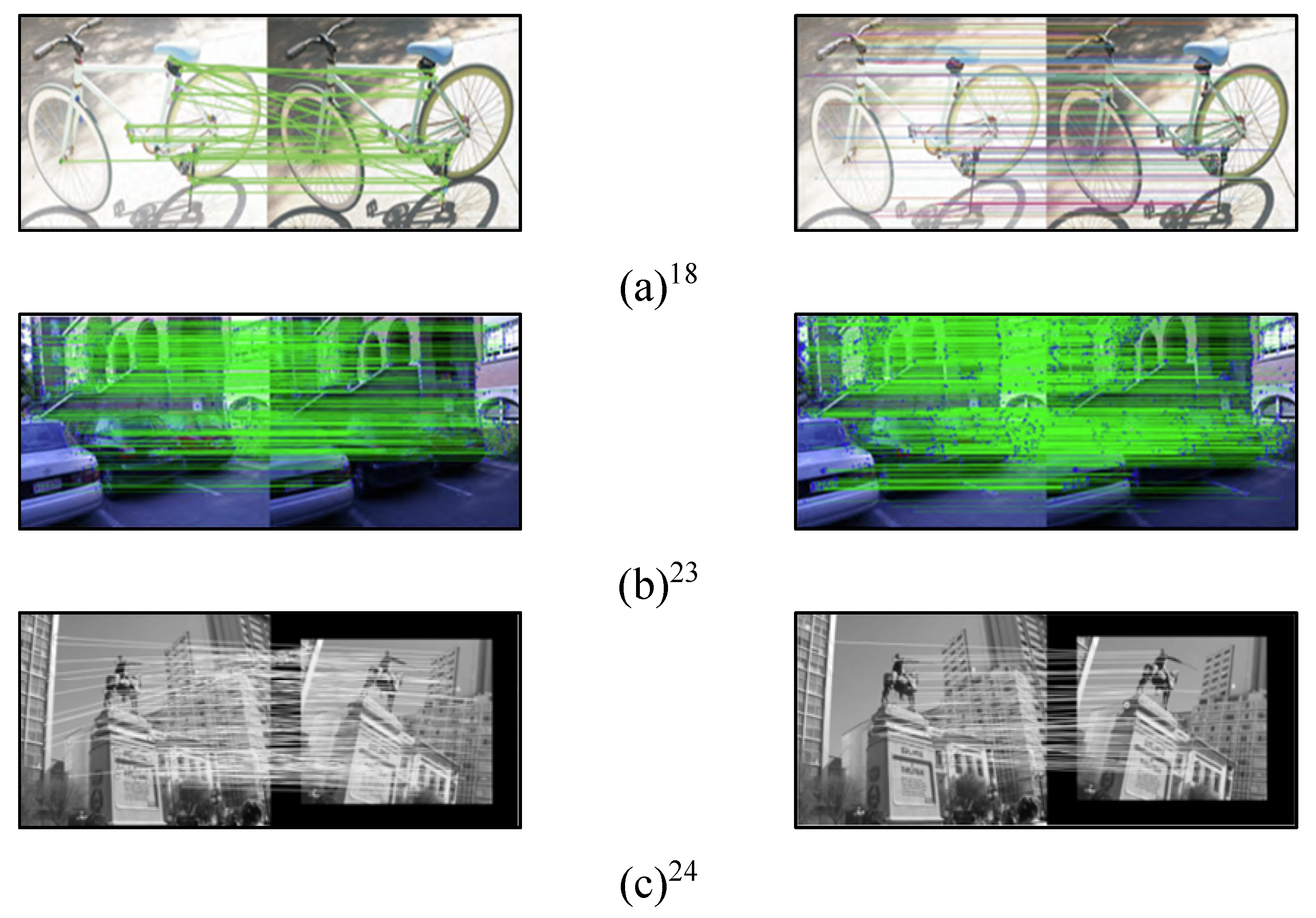
Figure 8.
3D pipeline model reconstructed by using optical sensors. (a)Zhang’s improved effect; (b)Liu’s improved effect.
Figure 8.
3D pipeline model reconstructed by using optical sensors. (a)Zhang’s improved effect; (b)Liu’s improved effect.
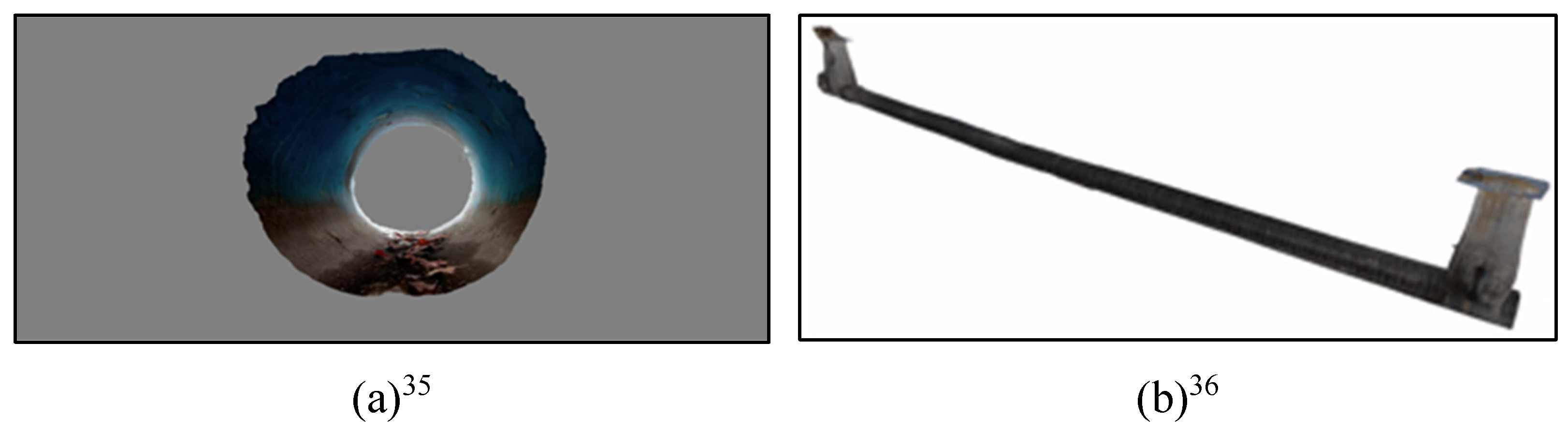
Figure 9.
3D pipeline model reconstructed by using structured light. (a)Li’s improved effect; (b)Wang’s improved effect.
Figure 9.
3D pipeline model reconstructed by using structured light. (a)Li’s improved effect; (b)Wang’s improved effect.
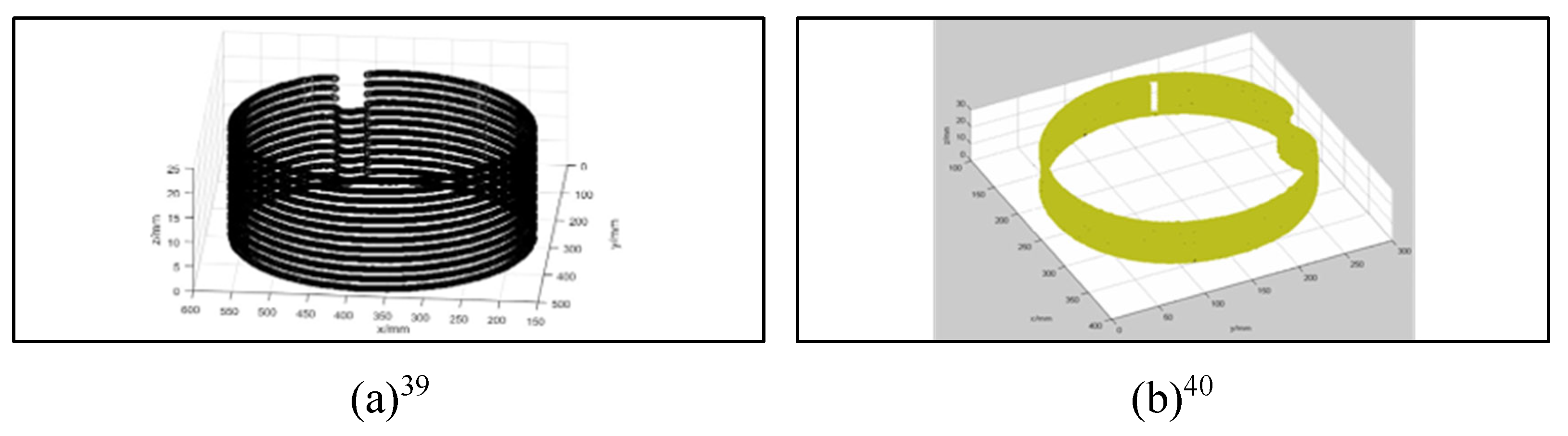
Figure 10.
3D pipeline model reconstructed by using laser sensors and sonar. (a)Li’s improved effect; (b)Zhou’s improved effect.
Figure 10.
3D pipeline model reconstructed by using laser sensors and sonar. (a)Li’s improved effect; (b)Zhou’s improved effect.
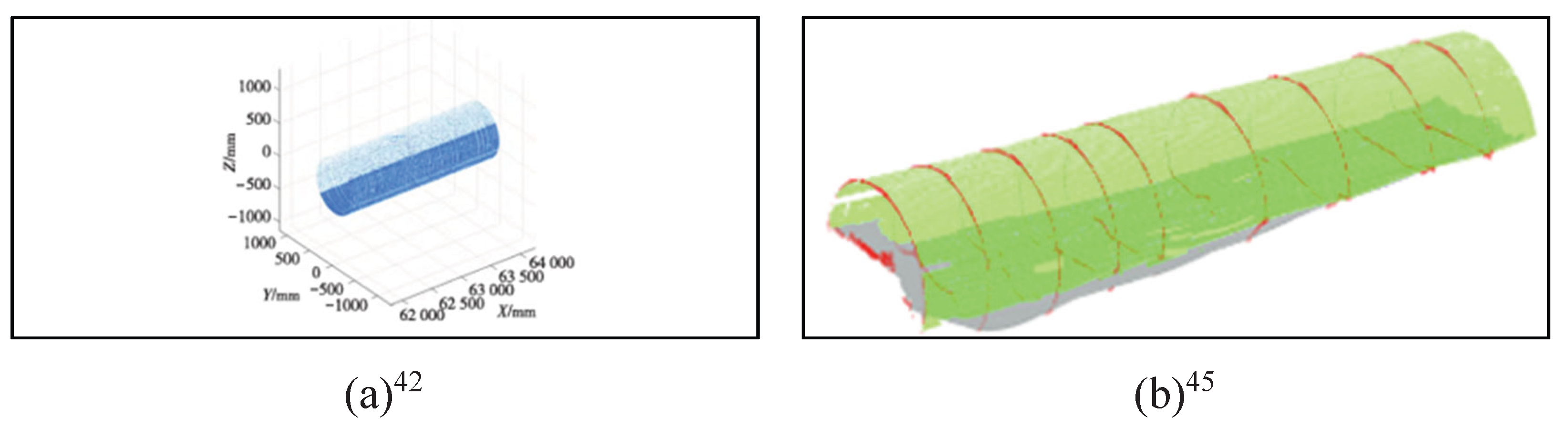

Table 1.
Comparison of turbid water imaging technologies.
| Technology Type | Advantages | Disadvantages |
|---|---|---|
| Polarized turbid water imaging | Easy to operate,Adapt to complex environments | High hardware requirements, poor adaptability to special target imaging |
| Single-pixel turbid water imaging | Low hardware requirements, low cost, high sensitivity, suitable for low-light environments | Requires significant computing resources |
| Deep learning-based turbid water imaging | High degree of automation, high precision, good image quality, and good generalization performance | Large data requirements and significant computing resource requirements |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



