Submitted:
18 November 2025
Posted:
18 November 2025
You are already at the latest version
Abstract
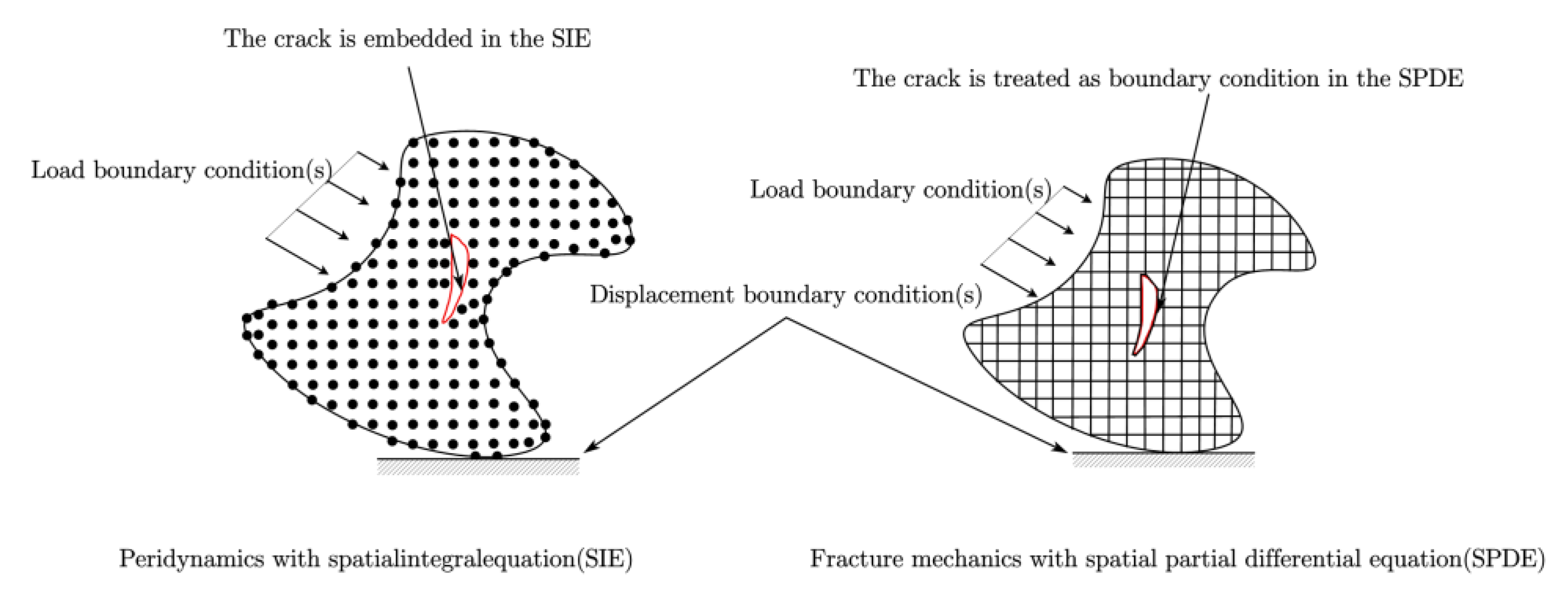
A state-based peridynamic (PD) fatigue framework is formulated for crack initiation, propagation, and interaction in Modified Compact Tension (MCT) specimens. By replacing local PDEs with a nonlocal integral model, discontinuities are handled without tip tracking or remeshing. Pin–fixture loading is represented via a nonlocal traction/contact mapping; fatigue damage evolves through a cyclic bond-degradation law consistent with S–N/Paris behavior. Driving forces are interpreted using a 3D PD J-integration and an energy-based bond-failure criterion, with quasi-static response advanced by adaptive dynamic relaxation. Calibration uses elastic/fracture properties referenced to baseline CT data, and validation combines finite-element benchmarks with targeted MCT tests recording load–displacement hysteresis, crack paths, and da/dN-∆K/∆J, trends across multiple ratios. The framework recovers nucleation sites without pre-seeded flaws, predicts mesh-insensitive growth rates and paths, and captures deflection, shielding/amplification, and coalescence. Quantitatively, path-angle discrepancies remain within a few percent, and life predictions fall within ~10% of experiments. Parametric studies on notch radius, ligament width, pin-hole diameter/offset, thickness/side grooves, stress ratio, and load amplitude establish how constraint and geometry govern initiation life, path stability, interaction distance, and failure mode. The result is a reproducible, mesh-independent route to fatigue-resistant MCT design and service-relevant assessment of metallic structures.
Keywords:
1. Introduction
2. Peridynamic Fatigue Modeling
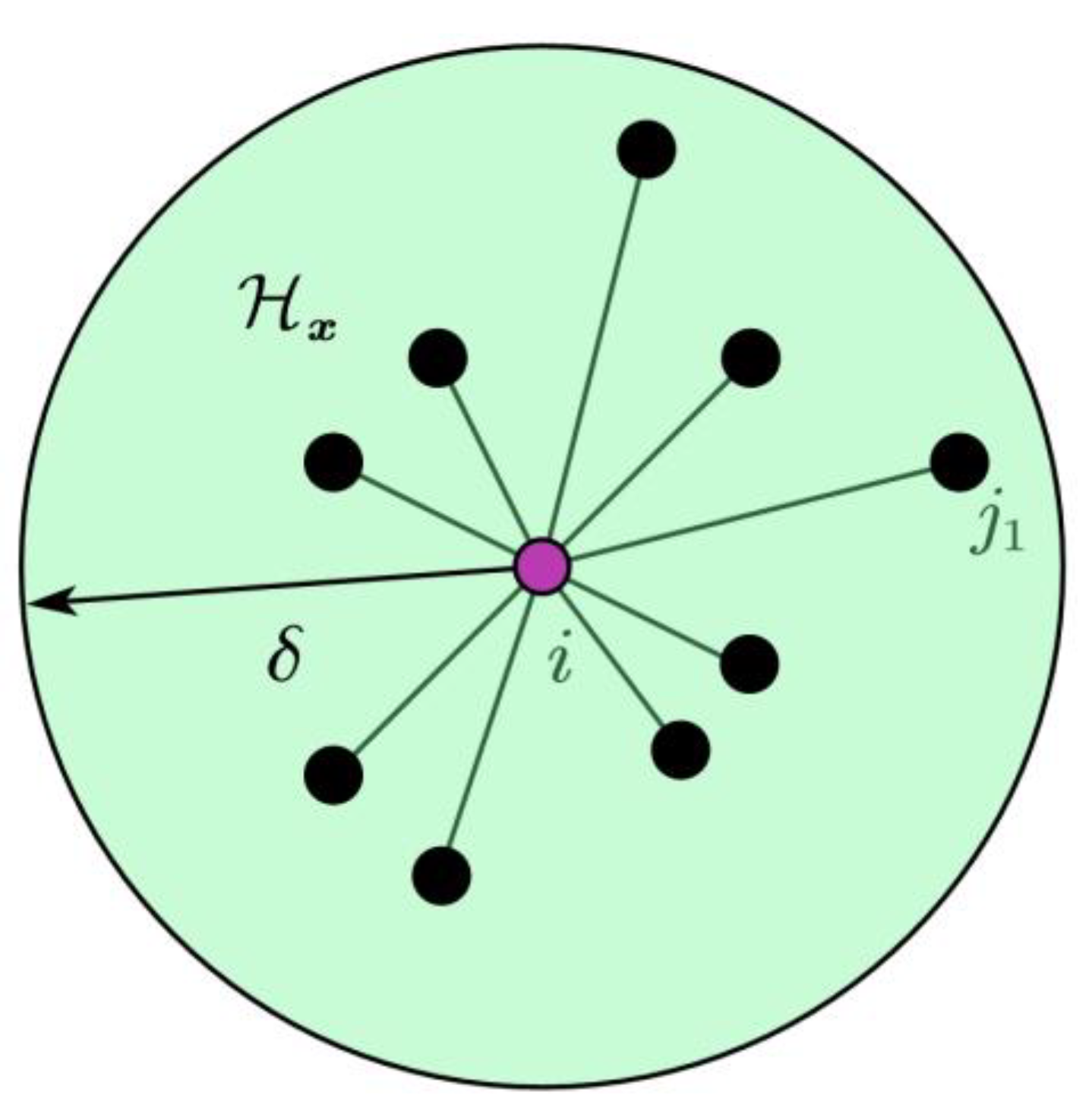
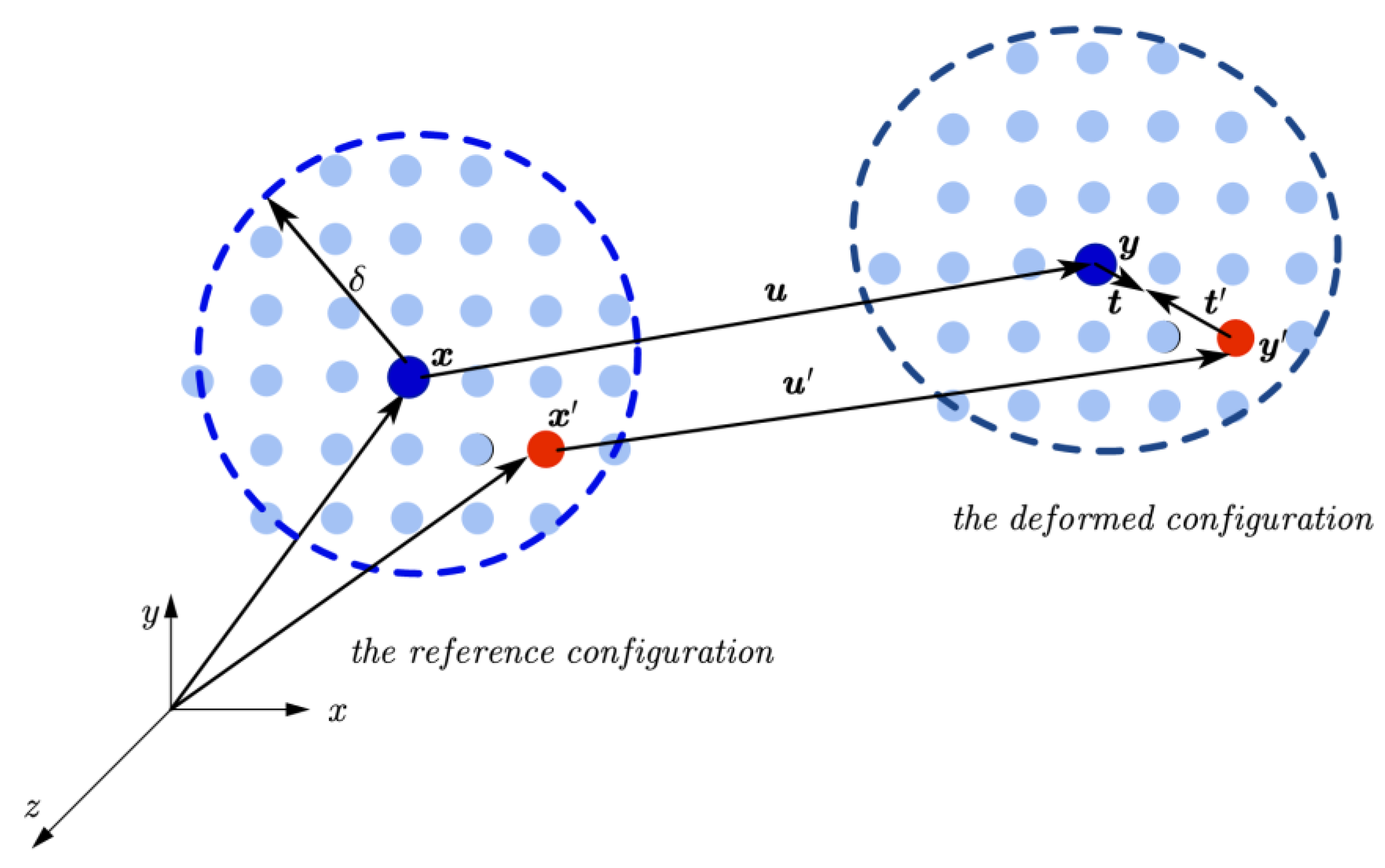
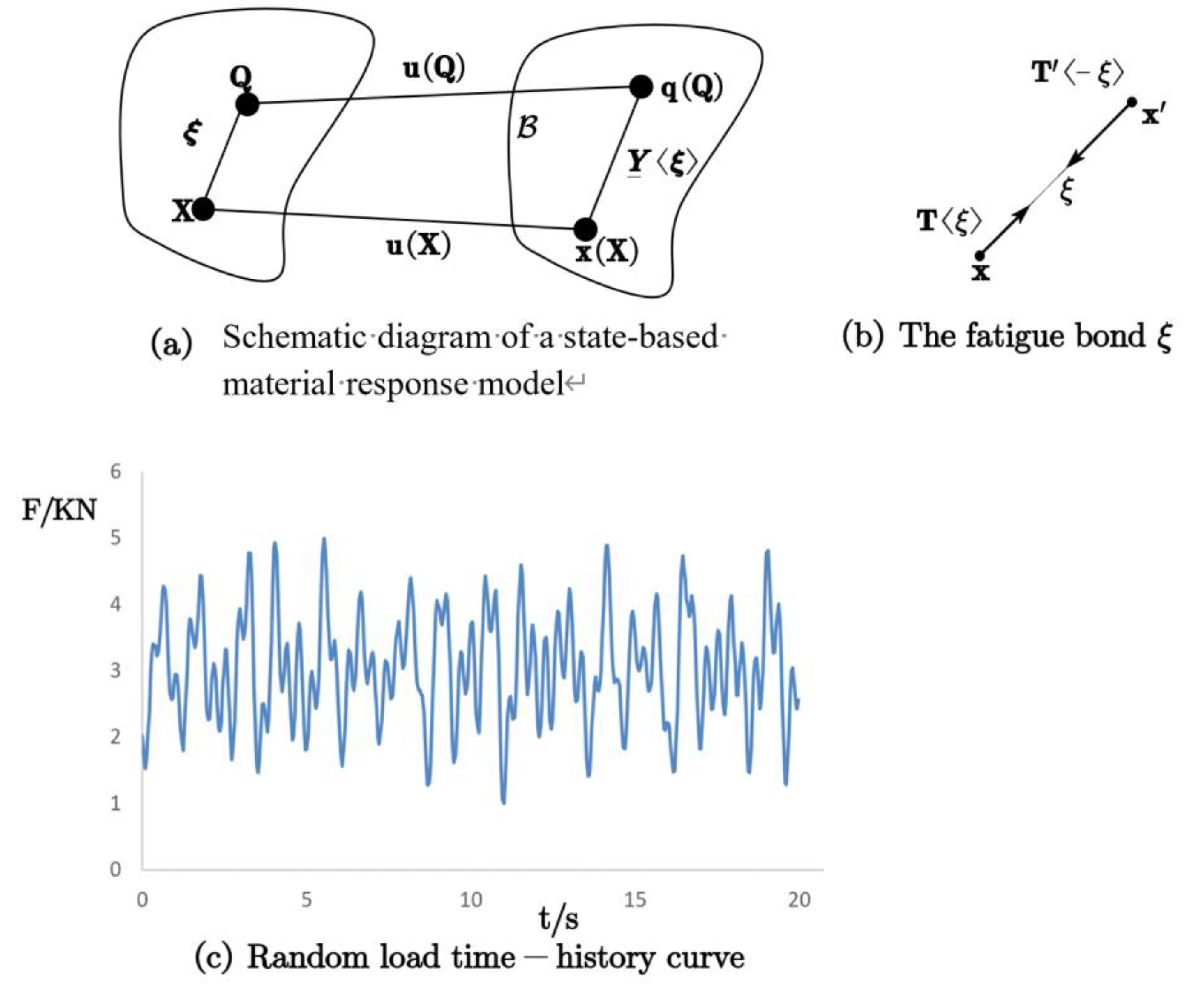
2.1. State-Based Peridynamic Theory
2.2. Fatigue Damage Theory
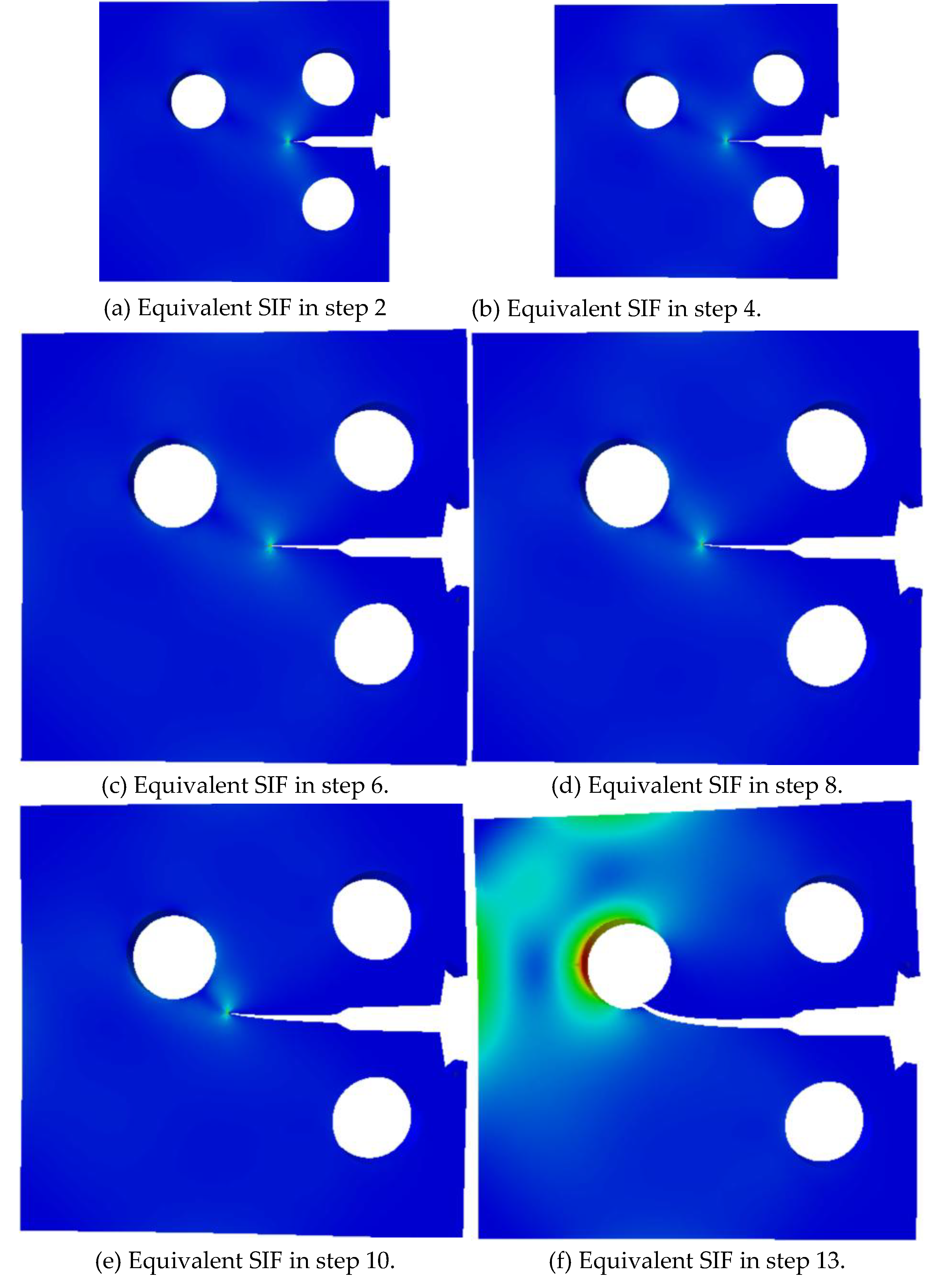
2.3. Modeling Multiple Fatigue Cracks
3. Prediction Model for Crack Interaction
3.1. Geometry, Loads, and Boundary Conditions
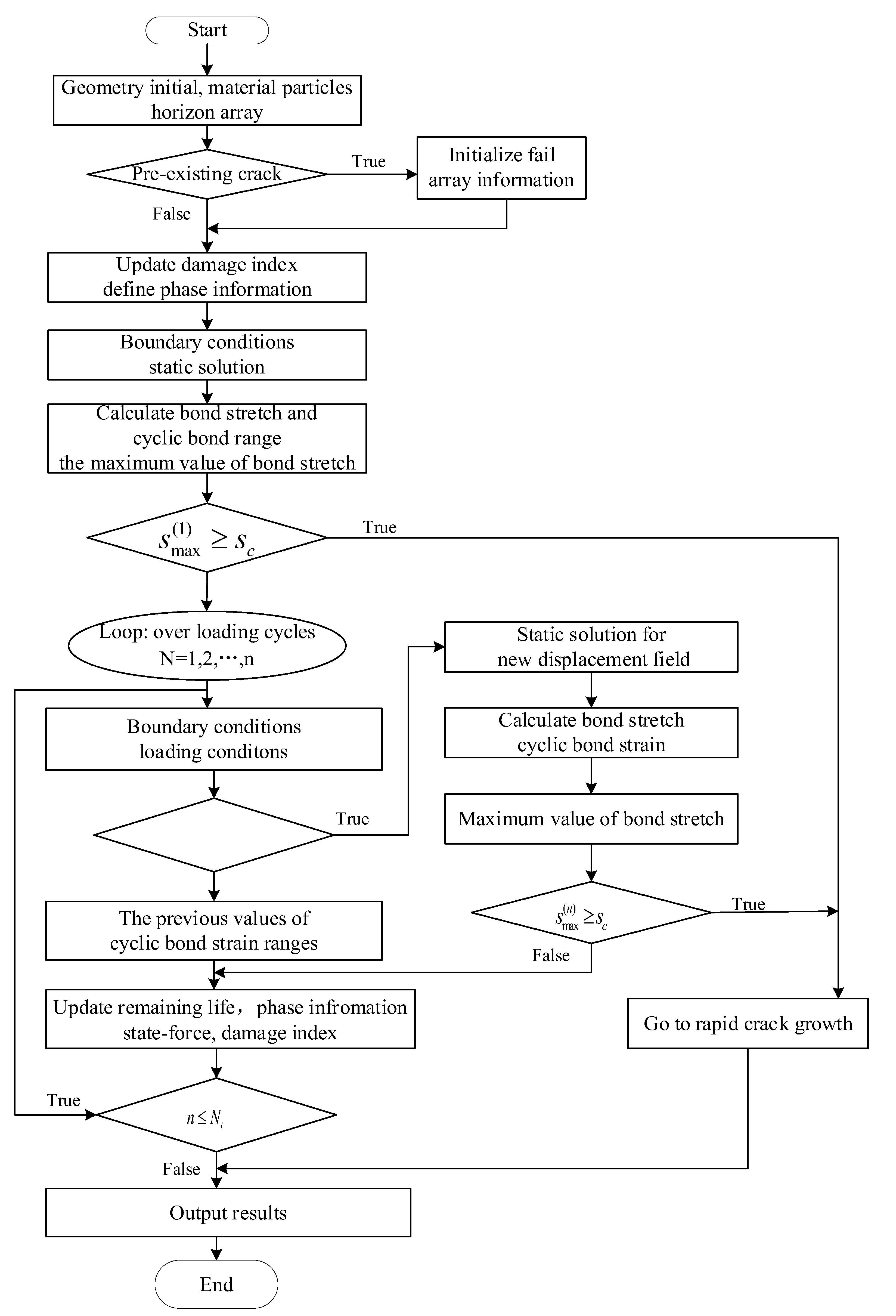
3.2. Numerical Procedure and ADR Scheme
3.3. Implementation Details
3.3.1. Discretization and Horizon
3.3.2. Influence Function and Moment Normalization
3.3.3. Fracture-Energy Calibration
4. Analysis of Model Parameters
4.1. Discretization and Horizon Size
4.2. Fatigue Damage Theory
4.3. Material and Fatigue Parameter Identification
5. Model Verification
5.1. Quasi-Static Response
5.2. Initiation Sites and Lives
5.3. Stress Concentration
6. Numerical Simulations and Experiments
6.1. Fatigue Testing Platform
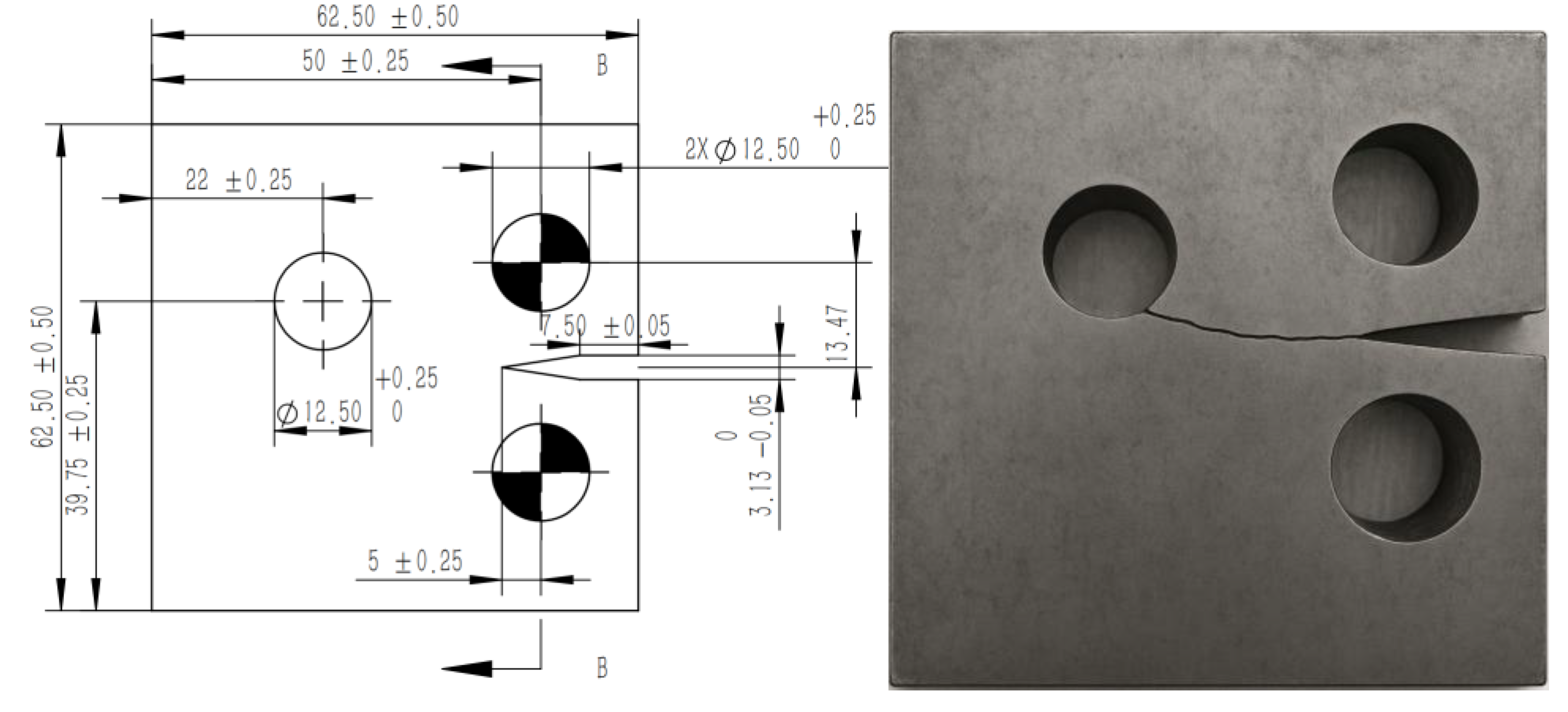
6.2. Loading Parameters and Geometric Configuration
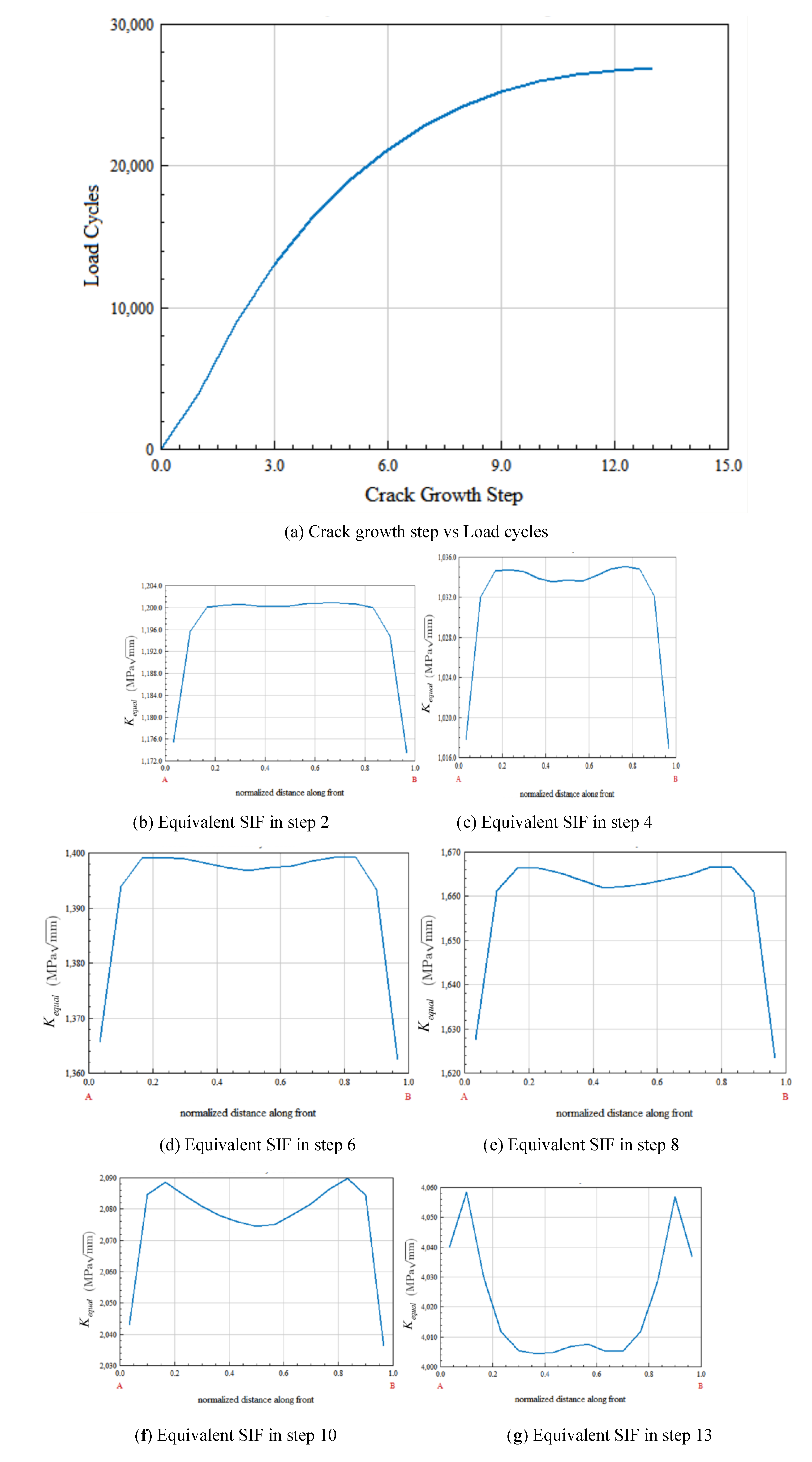
6.3. Modeling Multiple Fatigue Cracks
6.4. Experimental Validation
7. Conclusions
Author Contributions
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PD | Peridynamics |
| MCT | Modified Compact Tension |
| ADR | Adaptive Dynamic Relaxation |
References
- Mourad A.-H. I., Sajith S., Shitole S., et al. Fatigue life and crack growth prediction of metallic structures: A review [C].Structures,2025: 109031.
- Gao G., Liu R., Fan Y., et al.Mechanism of subsurface microstructural fatigue crack initiation during high and very-high cycle fatigue of advanced bainitic steels [J].Journal of Materials Science & Technology,2022, 108: 142–157.
- Adibaskoro T., Bordas S., Sołowski W. T., et al.Multiple discrete crack initiation and propagation in Material Point Method [J].Engineering Fracture Mechanics,2024, 301: 109918.
- Sangid M. D.The physics of fatigue crack propagation [J].International Journal of Fatigue,2025: 108928.
- Li L., Yang J., Yang Z., et al.Towards revealing the relationship between deformation twin and fatigue crack initiation in a rolled magnesium alloy [J].Materials Characterization,2021, 179: 111362.
- Fang X., Ding K., Minnert C., et al.Dislocation-based crack initiation and propagation in single-crystal SrTiO3 [J].Journal of Materials Science,2021, 56 (9): 5479–5492.
- Silling S. A., Lehoucq R. B.Peridynamic theory of solid mechanics [J].Advances in applied mechanics,2010, 44: 73–168.
- Silling S. A., Askari A. Peridynamic model for fatigue cracking [R]. Sandia National Lab.(SNL-NM), Albuquerque, NM (United States),2014.
- Zhang G., Le Q., Loghin A., et al.Validation of a peridynamic model for fatigue cracking [J].Engineering Fracture Mechanics,2016, 162: 76–94.
- Idan M.Advanced Modeling of Crack Propagation Using Extended Finite Element Method (XFEM): Module Theory and Computational Approaches [J],2025.
- Higuchi R., Okabe T., Nagashima T.Numerical simulation of progressive damage and failure in composite laminates using XFEM/CZM coupled approach [J].Composites Part A: Applied Science and Manufacturing,2017, 95: 197–207.
- Bouhala L., Makradi A., Belouettar S., et al.An XFEM/CZM based inverse method for identification of composite failure parameters [J].Computers & Structures,2015, 153: 91–97.
- Haddad M., Sepehrnoori K.XFEM-based CZM for the simulation of 3D multiple-cluster hydraulic fracturing in quasi-brittle shale formations [J].Rock Mechanics and Rock Engineering,2016, 49 (12): 4731–4748.
- Talebi B., Abedian A.Numerical modeling of adhesively bonded composite patch repair of cracked aluminum panels with concept of CZM and XFEM [J].Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering,2016, 230 (8): 1448–1466.
- Djebbar S. C., Madani K., El Ajrami M., et al.Substrate geometry effect on the strength of repaired plates: Combined XFEM and CZM approach [J].International Journal of Adhesion and Adhesives,2022, 119: 103252.
- González J. A. O., de Castro J. T. P., Meggiolaro M. A., et al.Challenging the “ΔKeff is the driving force for fatigue crack growth” hypothesis [J].International Journal of Fatigue,2020, 136: 105577.
- Nielsen M.Challenges for accurate and reliable determination of effective stress intensity factor range for structural assessments supporting incredibility of failure claims1 [J].Materials Science and Technology,2025: 02670836251354823.
- Vidler J., Kotousov A., Ng C.-T.Analysis of crack closure and wake of plasticity with the distributed dislocation technique [J].Theoretical and Applied Fracture Mechanics,2023, 127: 104034.
- Ritchie R. O., Liu D. Introduction to fracture mechanics [M]. Elsevier,2021.
- Xia C., Lv S., Cabrera M. B., et al.Unified characterizing fatigue performance of rubberized asphalt mixtures subjected to different loading modes [J].Journal of Cleaner Production,2021, 279: 123740.
- Gu T., Stopka K. S., Xu C., et al.Prediction of maximum fatigue indicator parameters for duplex Ti–6Al–4V using extreme value theory [J].Acta Materialia,2020, 188: 504–516.


| MCT |
Width /mm |
Thickness /mm |
pin-hole diameter/mm |
pin-hole spacing/mm |
initial notch length/mm |
Ligament Width/mm |
| Specimen | 62.5 | 12.5 | 12.5 | 26.94 | 17.5 | 3.13 |
| Name | E/GPa | σ0.2/MPa | σb/MPa |
Density g/cm3 |
Poisson’ Ratio |
Brittle Hardness/HB |
| 0Cr13Ni5Mo | 208 | 565 | 801.6 | 7.9 | 0.31 | 216 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



