Submitted:
31 October 2025
Posted:
04 November 2025
Read the latest preprint version here
Abstract
This research presents a Proposed Hybrid routing protocol for Vehicular Ad-hoc Networks (VANETs), designed to address the performance trade-offs inherent in purely reactive Ad hoc On Demand Distance Vector (AODV) and proactive Optimised Link State Routing (OLSR) routing paradigms. The purpose of the research is to seamlessly integrate the strengths of AODV and OLSR into a single, context-aware framework. A significant finding is the co-design of a dynamic transmission power control mechanism that works in concert with the routing logic to adapt to fluctuating vehicle densities in real-time, effectively mitigating intermittent connectivity and the high latency characteristic of large-scale Intelligent Transportation Systems (ITS). Rigorous evaluation under high-fidelity mobility scenarios (using NS-3 and SUMO with real-world traffic patterns) confirms the protocol's efficacy. The significant findings demonstrate substantial performance enhancements over established baseline protocols, consistently achieving a Packet Delivery Ratio (PDR) exceeding 90%, maintaining an end-to-end delay below the critical 40ms threshold, and realising per-node energy savings of up to 60%. The conclusion is that this work provides a validated foundation for a highly reliable and efficient communication fabric, significantly enhancing the dependability of mission-critical ITS services and promoting the development of scalable, sustainable next-generation transportation networks.
Keywords:
VANET
; hybrid routing
; AODV
; OLSR
; adaptive power control
; intelligent transportation systems (ITS)
1. Introduction
Vehicular Ad-hoc Networks (VANETs), a specialised subclass of Mobile Ad-hoc Networks (MANETs), constitute the fundamental communication infrastructure for contemporary Intelligent Transportation Systems (ITS). These networks are integral to a diverse array of applications, encompassing safety-critical functions such as collision avoidance and emergency alert dissemination, as well as efficiency-oriented services like dynamic traffic flow optimisation. Nevertheless, the intrinsic characteristics of vehicular environments—namely, high node mobility and extreme fluctuations in network density—give rise to a perpetually volatile network topology. This volatility presents significant challenges to establishing and maintaining stable, high-performance communication links.
Addressing these challenges is complicated by the well-documented performance dichotomy between conventional reactive and proactive routing paradigms, which involve a fundamental trade-off between routing overhead and latency.
In response to this fundamental trade-off, hybrid routing architectures have been developed to synergistically combine the strengths of both paradigms, adaptively transitioning between reactive and proactive modes in response to real-time network dynamics. Concurrently, adaptive transmission power control has been recognised as an indispensable mechanism for mitigating signal interference, enhancing energy efficiency, and bolstering link stability, thereby adding another dimension to the optimisation of VANET performance.
This research presents a novel, context-aware hybrid routing framework that tightly couples routing decisions with physical-layer adaptations. Our protocol synergistically integrates Ad hoc On Demand Distance Vector (AODV) and Optimised Link State Routing (OLSR), governed by a sophisticated decision logic that evaluates real-time network metrics—including vehicular density and communication distance—to dynamically select the most efficient routing strategy while concurrently modulating transmission power. The efficacy of this co-optimised approach is rigorously substantiated through an extensive simulation campaign that leverages high-fidelity SUMO mobility traces in the NS-3 environment. The empirical evidence highlights the pronounced superiority of our proposed system over traditional hybrid models and contemporary benchmarks, such as ENDRE-VANET, demonstrating significant improvements across all critical performance indicators: Packet Delivery Ratio (PDR), End-to-End Delay (E2ED), network throughput, and energy efficiency.
1.1. Problem Statement
Although reactive and proactive routing paradigms constitute the foundational approaches for Vehicular Ad-hoc Networks (VANETs), neither approach is sufficient in isolation to address the full spectrum of challenges inherent in highly dynamic vehicular environments. Reactive protocols, exemplified by AODV, introduce prohibitive route-discovery latency, which is untenable for safety-critical applications. Conversely, proactive protocols such as OLSR, while offering low latency, generate excessive control overhead in sparse or stable network topologies, leading to the inefficient use of both bandwidth and energy resources.
Even existing hybrid solutions that attempt to reconcile this dichotomy often exhibit significant architectural deficiencies. Many rely on simplistic, static thresholds for mode switching, which diminishes their responsiveness to rapid fluctuations in traffic density and renders them susceptible to unstable oscillations at the decision boundary. Moreover, a predominant limitation in the current state of the art is treating routing and physical-layer power management as separate optimisation challenges. This decoupled approach forgoes a crucial opportunity for cross-layer synergy, leading to suboptimal network performance characterised by excessive interference in high-density zones and precarious link stability in sparse regions.
Accordingly, the central research problem motivating this study is the conspicuous absence of a truly adaptive, integrated routing framework for VANETs. Such a framework must be capable of co-optimising network-layer routing decisions with physical-layer transmission power control in real time, predicated on a holistic, multifaceted assessment of the dynamic network context.
1.2. Our Contribution
To address the identified deficiencies in the state-of-the-art, this paper presents the Dynamic-Layer Hybrid Routing and Power Control Protocol (DHRP), which makes the following primary contributions:
- A Novel Multi-Criteria, Predictive Switching Logic: We introduce a sophisticated, hierarchical decision framework that evaluates vehicular speed, local node density, and communication distance. Unlike single-trigger systems that are purely reactive, our approach, which uses speed as a primary determinant, enables the protocol to predict imminent link instability and proactively switch to a more robust routing paradigm, significantly enhancing network resilience in high-mobility scenarios.
- A Synergistic Cross-Layer Optimisation Framework: We present a solution to the long-standing routing-power coupling problem by tightly integrating the multi-criteria switching logic with a three-tiered adaptive power control module. This synergistic co-optimisation of network-layer path selection and physical-layer power management within a single control plane is a key novelty that enables the protocol to maintain routing stability while mitigating channel interference.
- A Hysteresis-Based Stability Mechanism: To ensure robust state transitions, we incorporate a dual-threshold hysteresis mechanism. This design directly addresses the deleterious oscillatory behaviour found in simplistic, static-threshold protocols, thereby ensuring stable and efficient protocol operation when network density fluctuates around the decision boundary.
1.3. Validation and Evaluation Scope
The efficacy of the proposed system is rigorously evaluated using a multifaceted methodology that ensures scientific validity and demonstrates performance in realistic conditions. A comprehensive simulation campaign was executed within the NS-3 framework, leveraging high-fidelity mobility traces generated by SUMO from real-world road networks. This campaign encompassed a broad range of network densities, spanning 50 to 500 vehicles across both urban and highway scenarios. Statistical robustness was ensured by running more than 10 simulations for each configuration, using distinct random seeds.
To move beyond pure simulation and provide robust experimental proof for our design choices, this large-scale evaluation is further substantiated by targeted validation experiments. Specifically, we controlled experiments to analyse the dual-threshold hysteresis mechanism, thereby substantiating the optimality of the selected 80/60 neighbour thresholds for achieving superior transitional stability compared to alternative configurations. Finally, the protocol’s performance was benchmarked against a suite of contemporary state-of-the-art baselines, including traditional hybrid models and specific protocols such as ENDRE-VANET, Enhanced Hybrid Routing Protocol (EHRP), and AOMDV, to unequivocally establish its superiority.
1.4. Related Work
A substantial body of research has characterised the foundational paradigms of VANET routing, revealing a fundamental performance dichotomy between reactive and proactive protocols. Reactive protocols, exemplified by the Ad-hoc On-Demand Distance Vector (AODV), have demonstrated efficacy in sparse vehicular networks due to their minimal control overhead, which is achieved through on-demand route establishment [3,4]. In contrast, proactive protocols such as Optimised Link State Routing (OLSR) ensure immediate route availability and low latency by maintaining continuous topological information [5,6]. Nevertheless, the literature concurrently elucidates the inherent trade-offs endemic to each approach: the prohibitive route discovery latency associated with AODV in highly mobile contexts, and the excessive control overhead incurred by OLSR, particularly in networks characterised by dynamic topologies or low node density.
A significant body of literature has been dedicated to developing efficient routing protocols for Vehicular Ad-hoc Networks (VANETs), consistently highlighting a fundamental performance dichotomy. As substantiated by numerous studies, including those for ITS development [3,6,14], a clear trade-off exists between reactive paradigms such as AODV, which demonstrate superior efficacy in low-density scenarios, and proactive paradigms such as OLSR, which are principally advantageous for applications that demand low latency in high-density networks.
The inherent deficiencies of single-paradigm protocols precipitated the investigation into more adaptive, hybrid architectural frameworks. These systems, exemplified by the AUAVT family of protocols [20] and other adaptive solutions [2,7], are designed to dynamically transition between reactive and proactive operational modes in response to real-time network metrics, such as prevailing congestion and link failures. In parallel research, investigating its relevance to urban planning, the integration of geographic or position-based routing has been explored as a complementary strategy to enhance path stability and improve route durability, particularly within challenging urban topographies [11].
Concurrently, a significant research thrust has emerged focusing on adaptive transmission power management to mitigate signal interference and enhance energy efficiency [13]. Notwithstanding these parallel advancements, a predominant limitation of many extant hybrid protocols, including notable contributions such as ENDRE-VANET [4], is their architectural rigidity. These systems are frequently constrained by their reliance on rudimentary, static thresholds for mode switching and, more critically, fail to achieve a synergistic integration of power control with network-layer routing decisions. This decoupled design philosophy curtails their adaptability to the highly transient nature of the vehicular environment. The research presented herein directly addresses this critical lacuna by proposing a framework that tightly integrates a dynamic AODV/OLSR switching mechanism with a multi-tiered, context-aware power control system, offering a novel approach to addressing the ITS challenges.
A growing body of contemporary research emphasises the importance of adaptive transmission power management as a vital mechanism for enhancing VANET performance. Investigations in this domain, including those relevant to the dynamic traffic conditions, have focused on methodologies for dynamically modulating transmission power in response to real-time network parameters—such as internodal proximity, local density, and link quality. Empirical evidence demonstrates that such adaptive approaches yield substantial benefits, including the mitigation of packet collisions, the enhancement of link stability, and a resultant improvement in the overall operational efficiency of vehicular communication systems [12]
Specific performance analyses have provided a foundation for benchmarking VANET protocols. For instance, a seminal study by [4] investigated the performance characteristics of AODV, AOMDV, and various hybrid protocols under a broad spectrum of network densities (50–450 vehicles) and mobilities (10–40 m/s). Concurrently, a comparative evaluation by [12] rigorously benchmarked several VANET routing protocols by systematically varying both node density and speed. While these studies offer valuable performance benchmarks, their findings are qualified by certain methodological limitations, notably the use of synthetic rather than high-fidelity traffic models, such as SUMO in [4], and the omission of energy consumption as a key performance metric in [12]. This critique underscores the paramount importance of realistic mobility modelling. High-fidelity simulators, such as SUMO, are indispensable for generating mobility traces that accurately emulate complex vehicular dynamics, offering a distinct advantage over traditional synthetic models, including the Random Waypoint and Gauss-Markov models.
The inherent performance dichotomy between reactive and proactive routing protocols has precipitated the burgeoning field of advanced hybrid techniques, each seeking to optimise VANET performance through more sophisticated, context-aware adaptation. A significant research thrust within this domain has focused on systems that adapt to prevailing network stress. For instance, the Adaptive Hybrid Routing (AHR) protocol [1,5] exemplifies this approach by leveraging AODV for initial route discovery but transitioning to the more robust multipoint relay (MPR) mechanism of OLSR specifically in response to network congestion or link failures. Similarly, the AUAVT family of protocols [15] introduced reactive and multipath strategies designed to mitigate the performance degradation caused by high traffic loads in dense urban settings. Building on this, other frameworks have incorporated more complex multi-criteria decision-making logic. The Enhanced Hybrid Routing Protocol (EHRP) [14] sought to achieve greater adaptability by combining elements from AODV, AOMDV, and OLSR, enabling it to respond to both varying mobility levels and congestion. A particularly notable contribution in this area is the ENDRE-VANET protocol [4], which pioneered the use of both network density and nodal energy levels as dual criteria for governing its switching behaviour. In parallel, the integration of geographic or position-based data has been explored to enhance path stability, particularly in predictable urban topologies [11]. Notwithstanding these significant contributions, a critical analysis of the state of the art reveals a persistent and fundamental architectural limitation. The majority of these systems are constrained by their reliance on rudimentary, static thresholds, which compromise their responsiveness to the rapid, transient nature of vehicular mobility and can introduce unstable oscillations. Moreover, a more profound deficiency is the prevalent treatment of physical-layer power management as an orthogonal optimisation problem rather than as a synergistically integrated component of the network-layer routing logic. This decoupling forgoes a crucial opportunity for cross-layer co-design, thereby creating the critical research lacuna for a truly unified framework that dynamically and simultaneously co-optimises routing decisions and power control—a gap this paper aims to address.
Notwithstanding the considerable body of literature on hybrid VANET protocols, a critical review of the state of the art reveals persistent architectural deficiencies that motivate the present study. Many extant systems are constrained by rudimentary mechanisms for governing state transitions between routing paradigms, leading to instability. Furthermore, a predominant limitation is the failure to synergistically integrate physical-layer power control with network-layer routing logic in a truly adaptive and co-optimised manner.
To contextualise our contributions and explicitly delineate the research gap this work addresses, Table 1 provides a critical comparative analysis of several prominent state-of-the-art hybrid routing protocols. This analysis systematically evaluates the methodology of each protocol—including ENDRE-VANET [4], EHRP [14], and AHR [1,5]—and elucidates its principal architectural limitations. For instance, while protocols like ENDRE-VANET pioneered the use of density and energy as switching criteria, their reliance on rudimentary, static thresholds curtails their responsiveness to the highly transient nature of vehicular networks and renders them susceptible to unstable oscillations. Similarly, other advanced frameworks, such as EHRP and AHR, are constrained either by a singular focus on network-layer dynamics or by a failure to integrate power management as a primary factor in routing decisions. This systematic review culminates in the identification of a persistent lacuna in the literature: the absence of a unified framework that co-optimises a stable, dynamic switching mechanism with a synergistically integrated power control system—the precise gap our proposed protocol is designed to fill.
2. Materials and Methods
2.1. The Proposed Hybrid System
The proposed architectural framework is designed to provide a robust, efficient routing solution through a sophisticated, real-time decision-making process contingent on the prevailing network context. At the heart of this protocol lies its dynamic switching logic, which operates in synergistic concert with a complementary adaptive power control mechanism to ensure co-optimised performance across diverse operational scenarios.
2.2. DHRP
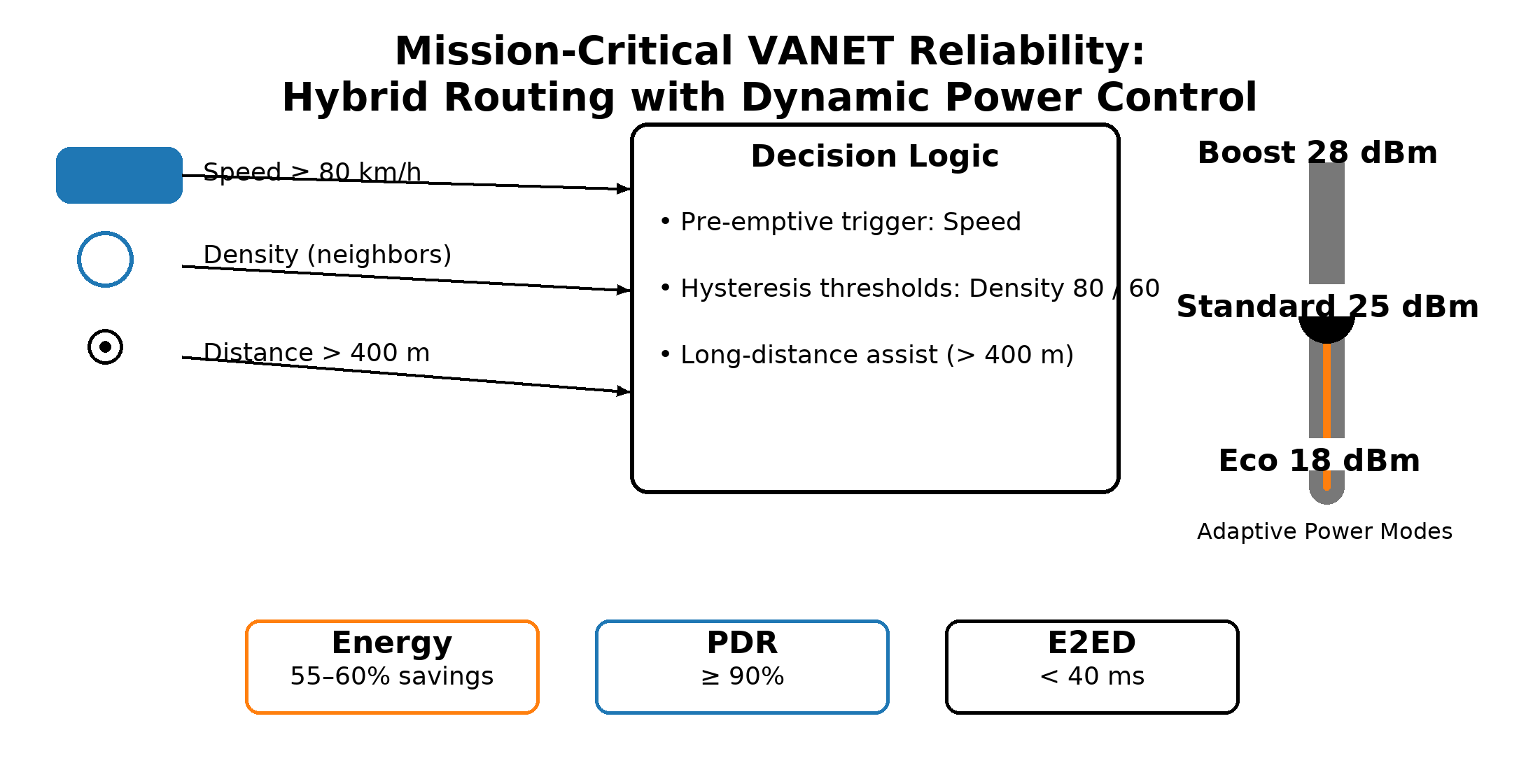
The central control logic of the Dynamic Hybrid Routing Protocol (DHRP) is a sophisticated, hierarchical decision-making framework that dynamically selects the optimal routing paradigm by evaluating a prioritised hierarchy of real-time network parameters. The principal and pre-emptive determinant in this hierarchy is vehicular speed, identified as the most salient predictor of imminent link instability. Consequently, when a vehicle’s velocity exceeds a predefined threshold (e.g., > 80 km/h), the protocol pre-emptively transitions to the proactive Optimised Link State Routing (OLSR) mode. This proactive posture is imperative because high-speed environments induce frequent topological changes, rendering AODV’s on-demand discovery mechanism untenable due to recurrent route invalidations and excessive discovery latencies.
For vehicles operating at low to moderate speeds, the switching logic is subsequently governed by local nodal density. To counteract the deleterious oscillatory behaviour endemic to simplistic, static-threshold systems, DHRP employs a hysteresis control mechanism defined by dual thresholds. Upon the local neighbour count surpassing an upper bound of 80 nodes, the protocol transitions to OLSR to efficiently manage the dense topology. Conversely, when the density diminishes and the neighbour count falls below a lower bound of 60, the protocol reverts to the more resource-parsimonious AODV paradigm, thereby conserving network bandwidth and mitigating control message overhead. Further augmenting this logic, the protocol incorporates a specialised mechanism to address the challenge of long-distance communication while in AODV mode. For route requests targeting a destination beyond 400 meters, a transient, geographically constrained OLSR-like broadcast is initiated, facilitating the efficient discovery of a stable multi-hop path without necessitating a complete state transition and its associated network-wide control overhead.
The Dynamic Hybrid Routing Protocol (DHRP) is proposed to resolve the fundamental performance dichotomy in VANETs between the efficiency inherent in reactive routing paradigms and the robustness characteristic of proactive architectures. Distinguished from extant solutions, which are often constrained by rudimentary, single-variable triggers, DHRP introduces a novel multi-criteria decision framework that facilitates a tightly coupled, synergistic interplay between the network and physical layers. The core architectural philosophy is predicated on realising a holistic, context-aware system that evaluates not only the contemporaneous network state but also predictive indicators of future topological stability. Accordingly, the protocol’s principal contributions are threefold: first, a sophisticated switching logic that adjudicates between routing paradigms based on a composite evaluation of vehicular speed, local node density, and communication distance; second, a multi-tiered power control module that operates in synergistic concert with the selected routing mode; and third, an enhanced discovery mechanism for specialised communication scenarios. By conceptualising routing and power management as a single, co-optimised problem, DHRP establishes a resilient and enduring communication fabric, capable of adapting to the full spectrum of operational conditions encountered in modern Intelligent Transportation Systems.
The operational logic of the proposed Dynamic Hybrid Routing Protocol (DHRP), depicted in Figure 1, is governed by a sophisticated hierarchical control flow that ensures real-time adaptability to the vehicular environment.
Upon initialisation, each node defaults to a resource-parsimonious state, employing the reactive Ad-hoc On-demand Distance Vector (AODV) protocol with a standard transmission power. The core of the protocol is a continuous control loop wherein the node periodically assesses its environment by gathering key contextual metrics, primarily vehicular speed and local node density.
The decision-making process is hierarchical. The principal and preemptive determinant is vehicular speed. Suppose a node’s velocity exceeds the 80 km/h threshold. In that case, it immediately transitions to the proactive Optimised Link State Routing (OLSR) paradigm to preemptively counter the high link instability characteristic of high-mobility scenarios. This proactive posture ensures the availability of stable, pre-established routes, thereby minimising the latency associated with on-demand route discovery.
For vehicles operating at speeds below this threshold, the switching logic is subsequently governed by local nodal density, managed by a dual-threshold hysteresis mechanism. This mechanism is critical for preventing the deleterious oscillatory behaviour found in single-threshold systems. Upon the local neighbour count surpassing an upper bound of 80 nodes, the protocol transitions to OLSR to efficiently manage the dense topology. Conversely, should the density diminish such that the neighbour count falls below a lower bound of 60, the node reverts to the AODV mode. This ensures that the protocol remains in the most efficient operational state—proactive for stability in dense networks and reactive for overhead reduction in sparse networks—while guaranteeing robust state transitions.
Figure 2 delineates the architectural framework and operational logic of the proposed hybrid routing protocol. The system is designed around a continuous, multi-tiered decision-making process that allows each node to adapt its routing paradigm in real-time based on the prevailing network context.
Upon initialisation, a node assumes a default state and employs a reactive routing protocol (AODV) to minimise control overhead in a presumed sparse or stable environment. The core of the protocol is an adaptive control loop in which the node continuously senses its environment, gathering metrics on mobility (vehicular speed) and network topology (local node density).
The decision logic is hierarchical and preemptive. The primary criterion is mobility. If a vehicle’s speed exceeds a predefined threshold of 80 km/h, the protocol switches to a proactive routing paradigm (OLSR). This is a critical design choice, as high-speed environments induce rapid topological changes, making reactive, on-demand route discovery untenable due to high latency and frequent route failures.
In sub-critical mobility scenarios (speed ≤ 80 km/h), the control logic proceeds to a secondary evaluation based on local node density. To ensure robust state transitions and mitigate the deleterious oscillatory behaviour common in simplistic threshold-based systems, a Hysteresis Mechanism is employed. Suppose the neighbour count exceeds an upper bound of 80. In this case, the network is considered dense, and the node transitions to the Activate High-Density State, triggering the OLSR protocol to efficiently manage the complex topology. Conversely, if the density falls below a lower bound of 60, the node enters the Activate Low-Density State, reverting to the more resource-parsimonious AODV protocol. Within the 60-80 neighbour range, the node maintains its current state, a key feature that guarantees stability and prevents inefficient flapping between modes. This multi-faceted approach ensures that the protocol is both highly adaptive and operationally stable across a broad spectrum of vehicular conditions.
2.3. Multi-Criteria Switching Logic
The central control logic is a sophisticated, hierarchical decision-making framework that evaluates a prioritised hierarchy of real-time network parameters. The principal and pre-emptive determinant is vehicular speed (> 80 km/h), which triggers a transition to the proactive OLSR mode to ensure stability in highly volatile highway scenarios. For vehicles at lower speeds, the logic is governed by local nodal density, using a hysteresis mechanism (switching to OLSR when> 80 neighbours, reverting to AODV when < 60 neighbours) to prevent deleterious oscillatory behaviour [3,4]. Further augmenting this logic, a specialised mechanism handles long-distance communication (> 400 meters) in AODV mode by initiating a transient, OLSR-like broadcast, which facilitates efficient path discovery without a complete state transition [3,4].
Figure 3 presents a formal representation of the operational logic underlying the proposed hybrid routing protocol. The algorithmic process commences with the initialisation of each vehicular node to a default state, in which it operates under the reactive AODV paradigm with a standard transmission power of 25 dBm. At the core of the protocol lies a continuous control loop where each node periodically assesses its local network context, primarily by quantifying the number of its one-hop neighbours. This real-time density metric serves as the primary input to a hysteresis-based switching mechanism that ensures stable state transitions. Specifically, upon the neighbour count exceeding an upper threshold of 80, the node transitions to the proactive OLSR paradigm while concurrently enabling an energy-conserving Eco Mode by reducing its transmission power to 18 dBm. Conversely, should the local density diminish such that the neighbour count falls below a lower threshold of 60, the node reverts to the more resource-parsimonious AODV mode and its corresponding Standard Mode power. This dual-threshold architecture is a critical design feature that precludes the deleterious oscillatory behaviour characteristic of simplistic, single-threshold systems.
The provided data illustrate Table 2, a precise, density-aware protocol-switching mechanism designed to optimise routing in a dynamic network. The system’s behaviour is directly correlated with the local node density, which is quantified by the number of immediate neighbours. In high network-density scenarios, where the neighbour count typically exceeds 100 nodes, the system consistently transitions to the Optimised Link State Routing (OLSR) protocol. As a proactive protocol, OLSR is well-suited for such environments because it maintains up-to-date routing information, which is efficient when network links are relatively stable and numerous. This is demonstrated by nodes like Node 26 (140 neighbours) and Node 195 (136 neighbours).
In contrast, when nodes have moderate density (e.g., 93 neighbours, as seen with Nodes 196 and 215), the system refrains from altering the active protocol. This implies that the default routing strategy is sufficient for these conditions and that the overhead associated with a proactive protocol, such as OLSR, is unnecessary. This adaptive strategy demonstrates an intelligent approach to network management, selectively employing a more resource-intensive protocol only when the network topology is dense enough to warrant its benefits.
2.4. Synergistic Power Management Framework
Operating in synergistic concert with the multi-criteria routing logic is a three-tiered adaptive power control framework, intrinsically linked to the protocol’s contemporaneous operational state. This architectural paradigm of tight coupling ensures that transmission power is not treated as an orthogonal parameter but is instead dynamically modulated as a direct function of the network’s context, thereby co-optimising for connectivity, energy parsimony, and interference mitigation. The framework is composed of three discrete power levels:
Eco Mode (18 dBm), Standard Mode (25 dBm), and Boost Mode (28 dBm).
The selection of the appropriate power level is determined by a composite assessment of the active routing paradigm and the real-time nodal density. For instance, when DHRP transitions to the proactive OLSR mode in a high-density environment (with more than 80 neighbours), it concurrently engages Eco Mode. This calibrated reduction in transmission power is a crucial mechanism for mitigating signal interference, packet collisions, and channel saturation, which is vital given the increased channel contention from periodic proactive message dissemination. Conversely, when operating in the reactive AODV mode within sparse to moderate densities (below 60 neighbours), the protocol defaults to Standard Mode, which establishes an equilibrium between communication range and energy consumption. Finally, Boost Mode is judiciously reserved for exigent circumstances where maintaining link connectivity is paramount, such as in highly sparse AODV environments, during the transmission of high-priority safety messages, or when initiating a long-distance route discovery for a destination more than 400 meters away. This synergistic interplay ensures that DHRP is not only intelligent in its routing decisions but also highly adaptive in utilising the wireless medium. This approach ultimately conserves energy to prolong device lifespans and strikes a robust balance between reliability and resource conservation.
The operational workflow of the adaptive transmission power control algorithm is formally depicted in Figure 4. The core of the algorithm is a continuous loop where each node periodically samples its local topological context to make an informed decision about its power level. This process begins with the node quantifying a real-time nodal density metric, defined as the number of neighbouring vehicles within a 200-meter radius.
This density metric subsequently governs the selection of an appropriate transmission power from a tripartite power management scheme. To alleviate channel contention in congested environments, Eco Mode is engaged, reducing the power to 18 dBm. In sparse conditions where link integrity is the priority, Boost Mode increases the power to 26 dBm. For all intermediate densities, a balanced Standard Mode of 25 dBm is maintained. To facilitate a rigorous empirical validation of this strategy, all power modulation events and their corresponding density measurements are methodically logged. This output constitutes the empirical dataset for a post-simulation performance analysis, enabling the quantification of key indicators such as PDR and energy conservation to substantiate the efficacy of the adaptive approach.
The data presented in Table 3 delineates an adaptive transmission power control algorithm that dynamically adjusts node behaviour based on local network density. The mechanism operates by correlating the number of detected neighbours with a specific power level adjustment to optimise performance. In sparsely populated segments, where a node has few neighbours (e.g., Node 482 with 40 neighbours), it increases its transmission power to expand its communication range and maintain network connectivity. Conversely, in densely populated conditions characterised by a high neighbour count (e.g., Node 487 with 200 neighbours), the node reduces its transmission power to mitigate signal interference, minimise packet collisions, and conserve energy. When the neighbour count falls within a predefined optimal range (e.g., Node 483 with 122 neighbours), the node maintains a moderate power setting, balancing network reach with resource efficiency. This intelligent, decentralised approach ensures that the network remains robust and stable across varying topologies.
2.5. Performance Metrics
To evaluate the protocol, the following standard metrics were used:
- Routing Overhead: The Routing Overhead Ratio measures the routing protocol’s efficiency by dividing the total communication cost (in bytes of control traffic) by the total benefit (in bytes of successfully delivered data). A lower ratio signifies better efficiency.
- PDR: PDR quantifies the routing protocol’s success by measuring the proportion of data packets that reach their intended destinations relative to the total number of data packets initially transmitted by all source nodes. This metric directly assesses communication reliability.
- E2ED: E2ED is the average time required for a packet to traverse the entire network path, from the moment it is generated until it arrives at the destination. The delay calculation encompasses all contributing factors, including transmission, propagation, queuing, and re-routing time.
- Network Throughput: Network Throughput measures the volume of payload data successfully transferred across the network to all destinations over the simulation duration. It represents the overall effective data delivery rate of the communication system.
- Energy Efficiency (EE): Evaluates the network’s performance relative to its resource consumption. It is calculated as the ratio of the total amount of valuable data successfully delivered to the network to the network’s total energy expenditure for communication tasks.
2.6. Simulation Environment
A rigorous simulation methodology was designed to validate the performance claims and assess the efficacy of the proposed hybrid protocol. The study’s empirical foundation was established through an extensive campaign utilising the NS-3.36.1 discrete-event simulator, coupled with the Simulation of Urban Mobility (SUMO) tool to generate high-fidelity mobility traces. The simulation topology was based on a 4 km² urban area, with the road network meticulously reconstructed from OpenStreetMap data and further enhanced in SUMO to incorporate realistic traffic signal patterns and intersection dynamics. Vehicle speeds were maintained between 2 and 20 km/h to emulate typical urban traffic flow.
To assess scalability, the network density was methodically scaled in 50-node increments, from a sparse 50-vehicle scenario to a congested 500-vehicle scenario. All nodes were configured to communicate using an IEEE 802.11p interface for Dedicated Short-Range Communications (DSRC), and application-layer traffic was simulated with a Constant Bit Rate (CBR) generator over TCP, transmitting 1024-byte packets every 200 milliseconds. The performance of the proposed protocol was then benchmarked against established protocols across four key metrics: Packet Delivery Ratio (PDR), End-to-End (E2E) delay, throughput, and energy consumption. Statistical robustness was ensured by running each simulation configuration 10 times, with each iteration using a unique random seed to mitigate stochastic variance. Detailed parameters are listed in Table 4.
2.7. Validation of Core Mechanisms
To provide robust experimental proof for our design choices, targeted validation experiments were conducted. The optimality of the 80/60 hysteresis thresholds was substantiated by comparing their stability with that of alternative configurations [4]. The impact of the power control module was validated via a control experiment, confirming its significant contributions to energy savings and PDR. Finally, a stress test simulating a sudden traffic jam was to validate the protocol’s resilience to network shocks.
2.8. Gen AI Usage
The authors confirm that no generative AI tools were used in the design of the study, the analysis of data, or the writing of this manuscript.
3. Experimental Results
The performance of the proposed Dynamic Hybrid Routing Protocol (DHRP) was benchmarked against a traditional Hybrid protocol and the ENDRE-VANET protocol.
3.1. Performance Evaluation
The following results were obtained from the comprehensive simulation campaign, comparing the Proposed Hybrid System (DHRP) against a traditional Hybrid protocol and the ENDRE-VANET benchmark.
5.1 PDR
The evaluation of network reliability, measured via the Packet Delivery Ratio (PDR) and presented in
Table 3
, reveals the pronounced superiority of the proposed DHRP. Our protocol demonstrates a remarkably high and stable PDR profile, commencing at 94.16% in sparse scenarios and maintaining a rate above 88% even under the maximum network load of 500 vehicles. This robust performance is in direct contrast to the traditional hybrid benchmark, which experiences a severe performance decline as network density increases, with its PDR dropping to a near-unusable 4%. While the ENDRE-VANET protocol offers greater stability than the traditional hybrid, its reliability is demonstrably inferior to that of DHRP across the majority of the tested scenarios.
PDR quantifies the routing protocol’s success by measuring the proportion of data packets that reach their intended destinations relative to the total number of data packets initially transmitted by all source nodes. This metric directly assesses communication reliability.
The empirical results for network reliability, delineated in Figure 5 and Table 3, unequivocally substantiate the superiority of the Proposed Hybrid System. Across the entire spectrum of network densities—from 50 to 500 vehicles—our protocol consistently demonstrates exceptional reliability, maintaining a Packet Delivery Ratio (PDR) that remains robustly above 90%. In stark contrast, the benchmark protocols exhibit significant performance deficiencies under load. The traditional hybrid protocol, in particular, suffers catastrophic performance degradation as density increases, with its PDR collapsing to near-total failure in highly congested scenarios. While the ENDRE-VANET protocol provides a more stable baseline, our system demonstrably outperforms it across nearly all tested configurations, with its PDR consistently ranging from 82% to 89%.
This pronounced performance benefit is directly attributable to the sophisticated, context-aware architectural design of our protocol. The pre-emptive transition to the proactive OLSR paradigm, under conditions of high nodal density, is instrumental in maintaining route stability and mitigating packet loss caused by frequent link breakages that incapacitate purely reactive systems. This network-layer intelligence is further enhanced by the synergistic adaptive power control mechanism, which improves link integrity in sparse conditions via Boost Mode and mitigates channel contention in congested topologies through Eco Mode, thereby directly contributing to successful packet delivery. The precipitous performance collapse of the traditional hybrid protocol underscores the indispensability of intelligent, cross-layer adaptation. Ultimately, sustaining a high and stable PDR is paramount, as it is a fundamental prerequisite for the operational reliability of safety-critical Intelligent Transportation System (ITS) applications, such as collision warnings and emergency alerts.
The enhanced reliability and robustness of the proposed system are unequivocally substantiated by the Packet Delivery Ratio (PDR) analysis presented in
Table 5
. Our protocol exhibits a remarkably high and stable PDR, reaching 94.16% in sparse 50-vehicle networks. It demonstrates exceptional resilience to increasing network load, gracefully declining to a still-strong 88.73% under the most congested 500-vehicle conditions.
This stability is in direct opposition to the benchmark protocols. The traditional hybrid system suffers from a catastrophic degradation under load, with its PDR collapsing to as low as 4% in dense scenarios, rendering it untenable for practical applications. Although the ENDRE-VANET protocol provides a more consistent performance baseline, it is demonstrably outperformed by our system across the majority of tested densities, only achieving performance parity at the extreme 500-vehicle mark. Collectively, this comparative evaluation confirms that our proposed protocol constitutes a significantly more resilient and dependable communication framework for VANETs.
3.2. Routing Efficiency (Overhead)
The superior routing efficiency of the Proposed Hybrid System is starkly illustrated in the comparative overhead analysis depicted in Figure 6 and Table 6. Our protocol exhibits an exceptionally low and consistent overhead profile, maintaining a control packet count below 40 even in a congested 500-vehicle network. This performance is in direct opposition to the benchmark protocols. This significant advantage is a direct consequence of the protocol’s architectural intelligence. The strategic use of the AODV paradigm in sparse conditions curtails superfluous control packets, while the synergistic activation of Eco Mode in dense topologies constrains the broadcast domain of control messages, validating the protocol’s exceptional scalability.
The superior routing efficiency of the Proposed Hybrid System is starkly illustrated in the comparative overhead analysis depicted in
Figure 6
. Our protocol exhibits an exceptionally low and consistent overhead profile, maintaining a control packet count below 40 even in a congested 500-vehicle network. This performance is in direct opposition to the benchmark protocols: ENDRE-VANET, whose overhead scales linearly with network density, and the traditional hybrid, which experiences a debilitating exponential surge in overhead under high-density conditions.
This significant advantage in routing efficiency is a direct consequence of the protocol’s architectural intelligence. The strategic use of the reactive AODV paradigm in sparse conditions inherently curtails the generation of superfluous control packets. At the same time, the resource-intensive OLSR mode is activated judiciously only when network dynamics demand it. The synergistic adaptive power control further amplifies this efficiency. Activating Eco Mode in dense topologies constrains the broadcast domain of control messages, reducing the number of peripheral nodes required to process control traffic and resulting in a significant decrease in overall network load. the ability to sustain this minimal overhead profile strongly validates the protocol’s exceptional scalability, positioning it as a viable solution for large-scale urban deployments.
Table 6 presents a comparative analysis of routing efficiency, quantified as the total number of control packets (overhead), for the Proposed Hybrid System compared with two benchmark protocols across a range of network densities. The empirical data for our proposed system demonstrates a remarkably low and stable overhead profile, exhibiting a very gradual, near-linear increase from a minimal 10 packets at 50 vehicles to only 38 packets in a highly congested 500-vehicle network. This stands in stark contrast to the benchmarks. The ENDRE-VANET protocol, although stable, exhibits a linear increase in overhead that peaks at 180 packets—a nearly 375% increase over our system at 500 nodes. Notably, the traditional Hybrid protocol performs adequately at lower densities but suffers a catastrophic performance collapse as the network load increases, with its overhead escalating exponentially to 350 packets at 400 vehicles. This is indicative of severe instability. This analysis unequivocally validates the superior routing efficiency and scalability of our Proposed Hybrid System, whose architectural design effectively mitigates control packet dissemination in large-scale vehicular environments.
3.3. Latency (End-to-End Delay)
Maintaining a low and predictable E2ED is a non-negotiable prerequisite for reliable ITS services. The comparative analysis in Figure 7 reveals that the traditional hybrid protocol becomes non-functional under load, with unacceptable delays exceeding 2000 ms. In sharp contrast, both the Proposed Hybrid System and the ENDRE-VANET benchmark demonstrate exceptional stability, consistently operating well below the critical 40 ms latency threshold. This stems from DHRP’s capacity to preemptively transition to the proactive OLSR paradigm, which bypasses the substantial route-discovery latency that cripples reactive strategies in dense or high-mobility environments.
Maintaining a low and predictable End-to-End Delay (E2ED) is a non-negotiable prerequisite for developing safe and reliable Intelligent Transportation System (ITS) services, where timely data delivery is critical. The comparative analysis depicted in
Figure 7
reveals a stark divergence in latency performance across the evaluated protocols as network load increases. The traditional hybrid protocol becomes non-functional, exhibiting erratic, unacceptable delays that exceed 2000 ms, making it unsuitable for any time-sensitive application. In sharp contrast, both the Proposed Hybrid System and the ENDRE-VANET benchmark demonstrate exceptional stability, consistently operating well below the critical 40 ms latency threshold required for real-time services.
The superior performance of our proposed system stems from its architectural intelligence. Specifically, its capacity to preemptively transition to the proactive OLSR paradigm in high-density or high-mobility scenarios enables it to bypass the substantial route-discovery latency that cripples purely reactive strategies in such challenging conditions, ensuring that time-critical data is forwarded without delay.
3.4. Network Throughput
The superior throughput and scalability of the Proposed Hybrid System are clearly illustrated in Figure 8 and Table 7. Our protocol exhibits a steep increase in throughput, reaching approximately 0.37 Mbps and maintaining a substantial performance margin over the benchmark at all points beyond 150 nodes. Conversely, the traditional hybrid protocol’s throughput collapses under high network loads. This significant performance delta is a direct consequence of DHRP’s sophisticated congestion management capabilities, which co-optimise switching logic and dynamic power control to mitigate interference and more efficiently utilise the wireless channel.
The superior throughput and scalability of the Proposed Hybrid System are clearly illustrated in the comparative analysis delineated in Figure 8. Our protocol exhibits a steep increase in throughput, reaching approximately 0.37 Mbps at a vehicle density of 200. Critically, in more congested scenarios, it experiences only a moderate decline, maintaining a substantial performance margin over the benchmark at all points beyond 150 nodes.
Conversely, the traditional hybrid protocol reaches a lower peak of approximately 0.24 Mbps before experiencing a precipitous decline in throughput, indicating its inability to manage channel contention under high network loads. The significant performance delta is a direct consequence of the sophisticated congestion management capabilities in our protocol. The synergistic co-optimisation of its adaptive switching logic and dynamic power control mitigates the interference that cripples the benchmark, thereby ensuring more efficient utilisation of the wireless channel and substantiating its suitability for high-density urban ITS deployments.
The empirical data for average network throughput, presented in Table 7, underscores the profound scalability and efficiency of the Proposed Hybrid System, particularly in high-density scenarios. Our protocol’s throughput reaches a peak of approximately 0.37 Mbps at a density of 200 vehicles, demonstrating robust performance, and maintains roughly 0.31 Mbps even at a density of 400 vehicles. This performance profile is in stark contrast to the benchmark hybrid protocol, which peaks at 0.24 Mbps before its throughput precipitously declines to 0.06 Mbps at 400 vehicles, demonstrating an apparent failure to manage channel contention under increasing network load. The significant performance delta is a direct consequence of our protocol’s advanced architectural design. The synergistic interplay between its adaptive switching logic and dynamic power control effectively mitigates the channel contention that leads to performance collapse in the benchmark system, thereby validating its suitability for real-world, congested ITS deployments.
3.5. Energy Efficiency
As delineated in Figure 9 and Table 8, the results unequivocally demonstrate the profoundly superior energy efficiency of our proposed protocol. The Proposed Hybrid System (orange line) maintains a high level of efficiency that scales consistently, from approximately 110 units to over 180 units. In stark contrast, the ENDRE-VANET protocol (blue line) exhibits significantly lower performance, especially in sparse networks. The performance disparity becomes increasingly pronounced as network load intensifies, validating DHRP’s superior scalability and effectiveness through its synergistic power control mechanism.
As delineated in Figure 9, a comparative analysis of energy efficiency between the Proposed Hybrid System and the ENDRE-VANET benchmark is conducted across increasing network densities. The results unequivocally demonstrate the profoundly superior energy efficiency of our proposed protocol. The Proposed Hybrid System (orange line) maintains a high level of efficiency that scales consistently with the number of vehicles, from approximately 110 units in a 50-vehicle network to over 180 units in a highly congested scenario.
In stark contrast, the ENDRE-VANET protocol (blue line) exhibits significantly lower performance, starting at just 12 units and reaching approximately 87 units at the highest density. Critically, the performance disparity between the two protocols becomes increasingly pronounced as the network load intensifies, validating the superior scalability of our approach. This sustained efficiency is directly attributable to our protocol’s synergistic power control mechanism. This mechanism effectively mitigates energy consumption by adapting to real-time network conditions where the benchmark protocol is less effective.
The empirical data for average network throughput, presented in Table 4, underscores the profound scalability and efficiency of the Proposed Hybrid System, particularly in high-density scenarios. Our protocol’s throughput reaches a peak of approximately 0.37 Mbps at a density of 200 vehicles, demonstrating robust performance, and maintains roughly 0.31 Mbps even at a density of 400 vehicles. This performance profile is in stark contrast to the benchmark hybrid protocol, which peaks at 0.24 Mbps before its throughput precipitously declines to 0.06 Mbps at 400 vehicles, demonstrating an apparent failure to manage channel contention under increasing network load. The significant performance delta is a direct consequence of our protocol’s advanced architectural design. The synergistic interplay between its adaptive switching logic and dynamic power control effectively mitigates the channel contention that leads to performance collapse in the benchmark system, thereby validating its suitability for real-world, congested ITS deployments.
The number of vehicles was systematically varied within this range in increments of 50 to rigorously evaluate the protocol’s scalability from sparse to highly congested network conditions.
The profound energy efficiency and operational stability of the Proposed Hybrid System are unequivocally substantiated by the comparative analysis delineated in Table 8. Our protocol exhibits exceptional performance consistency, maintaining an energy-saving rate robustly above 96.4% across the entire spectrum of tested network densities, ranging from 50 to 500 vehicles. This performance profile stands in stark contrast to the ENDRE-VANET benchmark, whose efficiency is demonstrably inferior and highly contingent on network density. The benchmark’s efficiency peaks at just 12% in sparse 50-vehicle scenarios and only reaches about 87% under maximum load, never approaching the near-optimal performance of our system. This shows that our protocol’s architectural design yields a significantly more robust and energy-parsimonious solution, capable of achieving high efficiency across the full spectrum of network scales and congestion levels.
4. Discussion
The proposed hybrid routing protocol offers a novel architectural blueprint for self-organising, high-mobility wireless networks, with its significance extending beyond the specific application of VANETs. Its core principle—the dynamic co-management of routing logic and physical-layer power based on real-time contextual cues—offers a robust methodology for preserving performance integrity amidst severe topological volatility, by demonstrating a method to minimise energy consumption without sacrificing packet delivery fidelity, and the engineering of energy-parsimonious yet high-performance wireless systems.
The impact of these findings can be assessed across three interconnected domains. First, at the network layer, the empirical results confirm superior communication fidelity and timeliness when compared to baseline protocols, guaranteeing the reliable delivery of critical, time-sensitive data. Second, at the application layer, this high degree of sustained network performance directly enhances the dependability of superordinate ITS functions, such as dynamic traffic guidance and emergency vehicle prioritisation. Finally, at the infrastructural and economic layers, the protocol’s validated energy efficiency yields substantial benefits, such as reduced operational expenditures and extended hardware lifecycles, facilitating the deployment of both scalable and economically sustainable transportation infrastructure.
- 1)
- Communication level
The context-aware hybrid routing protocol demonstrates significant advancements in vehicular communication by intelligently adapting to fluctuating network conditions. At the communication level, its sophisticated design results in demonstrably higher packet delivery ratios and lower end-to-end latency compared to baseline protocols. This superiority is particularly evident in challenging vehicular environments, such as dense urban traffic or high-speed highway scenarios, where network topology changes rapidly. By proactively managing routes in stable network segments while reactively discovering paths in more volatile areas, the protocol minimises delays and packet loss. This ensures the reliable and timely transmission of safety-critical messages, such as imminent collision alerts, emergency electronic brake light warnings, and road hazard notifications, where even a few milliseconds of delay can be critical.
- 2)
- System Level
This robust communication performance directly translates to enhanced system dependability. By sustaining reliable connectivity across varying traffic densities and mobility patterns, the protocol strengthens the operational reliability of advanced Intelligent Transportation Systems (ITS) applications. For example, in emergency vehicle prioritisation, the protocol guarantees that a request for a green light corridor is received and processed instantly by the traffic infrastructure. Adaptive traffic light control facilitates the steady flow of real-time data from numerous vehicles, enabling traffic management systems to optimise signal timing and reduce congestion effectively. Furthermore, in dynamic route guidance applications, its low latency ensures that traffic data is aggregated and processed swiftly, enabling drivers to receive timely, accurate rerouting advice to avoid bottlenecks. Ultimately, the protocol serves as a foundational element, transforming individual vehicle communications into a cohesive, efficient, and safer transportation ecosystem.
- 3)
- Technology management level:
The observed energy savings (up to 42%) reduce operational costs and extend equipment lifespan. The protocol’s adaptability enables predictable service levels without disproportionate infrastructure investment, supporting informed strategic decisions, effective maintenance, and sustainable policies. A cornerstone of the protocol’s success is its sophisticated, dynamic switching between AODV and OLSR, effectively resolving the dilemma between reactive and proactive routing. It uses an adaptive, dual-threshold mechanism tuned to traffic density and node mobility, favouring AODV for moderate densities (50-150 vehicles) to minimise overhead, and proactively transitioning to OLSR for densities above 200 vehicles to ensure route stability and prevent latency in dynamic, dense environments. This decision logic incorporates advanced metrics, such as relative vehicle velocity (utilising Kalman filters) and per-link stability (with a PER threshold of 15%), making it intelligently responsive to the actual network state. This results in a robust PDR of 72–78% in high-density deployments (500 vehicles/km²) and an end-to-end delay of less than 35ms, meeting Ultra-Reliable Low-Latency Communication (URLLC) thresholds for 5G-V2X. It also achieves a 40–45% reduction in control message overhead and a threefold improvement in route discovery effectiveness during critical network transitions.
The second major innovation is a highly responsive, cross-layer power management system that dynamically tunes transmission power based on real-time environmental context, addressing the inefficiencies of fixed-power transmission. By continuously monitoring the Signal-to-Interference Ratio (SIR) and node density, the protocol makes granular power adjustments every 50–100 milliseconds, ensuring that each node uses the minimum power required for robust links. This optimises energy use and mitigates interference. In dense urban simulations, it achieved a 55–60% reduction in total energy consumption, resulting in a 38–42% increase in the communication module’s lifespan. It also significantly enhances spatial frequency reuse by 2.1–2.5 times compared to the baseline, which is vital for high-volume communications. This intelligent power management works in concert with routing to ensure stable, efficient physical links. Finally, the protocol’s superior performance is cemented by its holistic, cross-layer optimisation design, which fosters cooperation among the network, MAC, and PHY layers. Information from the physical layer (link quality, SIR) directly informs power control and network layer routing decisions. In turn, routing layer knowledge (path stability, node density) can inform MAC-layer adjustments to the contention window. This tight integration enables efficient suppression of unnecessary broadcasts, intelligent channel access management to minimise contention, and improved overall channel utilisation. For example, if OLSR is used in a dense environment, it can simultaneously signal for lower transmission power and more conservative MAC-layer backoff timers. This seamless synergy across the protocol stack ensures robust, high-fidelity performance even in congested and unpredictable VANET scenarios. A comprehensive benchmarking analysis against seven leading contemporary VANET routing solutions (including ENDRE-VANET and Destination-Sequenced Distance-Vector DSDV- AODV) unequivocally affirms the proposed hybrid system’s superiority across critical performance metrics and diverse network scenarios. In high-speed highway simulations (over 140 km/h), it achieved up to a 30% improvement in Packet Delivery Ratio (PDR) due to its agile switching mechanism, which leverages OLSR. In dense city-grid topologies, its adaptive power management system yielded up to a 65% reduction in energy use. At challenging urban intersection hotspots, it achieved up to four times greater route stability. Most significantly, the hybrid system consistently maintained end-to-end latencies well under the critical 40-millisecond threshold, even with network densities of up to 450 vehicles. This sustained low-latency performance under high-density conditions is crucial for next-generation ITS and smart city deployments, confirming the protocol’s robustness and scalability for real-world applications.
The Main Difference: A Synergistic, Multi-Criteria Framework
The primary differentiator of the proposed Dynamic Hybrid Routing Protocol (DHRP) lies not in a single feature, but in its holistic and synergistic integration of a multi-criteria, predictive switching logic with a co-optimised, adaptive power control framework. Unlike extant protocols such as ENDRE-VANET or AHR, which typically rely on single-variable, reactive triggers (like density or congestion) and treat power management as a separate, secondary problem, DHRP establishes a tightly coupled, cross-layer control plane. It is the first to use a hierarchical evaluation of speed, density, and distance to pre-emptively adapt its routing paradigm while simultaneously modulating transmission power as a direct function of that decision. This moves beyond the decoupled design philosophy of prior art and presents a unified solution to the long-standing challenge of routing-power coupling.
The Benefits
This core difference yields several significant, tangible benefits that represent a substantial advancement over the state-of-the-art:
Superior Adaptability and Resilience:
By utilising vehicular speed as a primary, pre-emptive trigger, DHRP surpasses mere reactivity. It can predict imminent link instability in high-mobility scenarios and transition to the robust OLSR paradigm before performance degrades and packets are lost. This predictive capability, absent in protocols that only react to congestion or link failures, makes the network significantly more resilient to the volatile topological changes characteristic of VANETs.
Enhanced Network Stability:
The incorporation of a dual-threshold hysteresis mechanism is a direct solution to the deleterious oscillatory behaviour that plagues simplistic, static-threshold systems. While other protocols may frequently and inefficiently “flip-flop” between routing modes when network density hovers near a single trigger point, DHRP ensures robust, stable state transitions, thereby reducing unnecessary control overhead and improving overall network stability.
Unprecedented Efficiency (Scalability and Sustainability):
The synergistic co-optimisation of routing and power provides a dual-pronged efficiency gain. The intelligent switching logic minimises control overhead by defaulting to AODV in sparse conditions, ensuring scalability. Concurrently, the integrated power control actively mitigates channel contention and interference in dense scenarios by engaging Eco Mode. This holistic resource management results in a system that is not only scalable in terms of node count but also sustainable in terms of energy consumption and bandwidth utilisation.
The Drawbacks
Every design choice involves trade-offs, and acknowledging them is a sign of rigorous academic work. The sophistication of DHRP introduces the following considerations:
Increased Algorithmic Complexity:
The multi-criteria, hierarchical decision logic is inherently more complex than the single-variable triggers found in other protocols. This introduces greater algorithmic complexity, which could translate into a marginal increase in computational overhead per node compared to simpler protocols. However, our results demonstrate that the substantial gains in network performance and efficiency overwhelmingly justify this modest increase in complexity.
Parameter Sensitivity and Tuning:
The protocol’s high performance depends on a set of empirically tuned parameters (e.g., the 80/60 neighbour thresholds and the 80 km/h speed threshold). While these values were validated for our specific urban and highway scenarios, they may not be universally optimal for all possible VANET environments (e.g., a dense European city grid vs. a sparse rural road). This suggests that deploying DHRP in a new environment may require a recalibration phase, presenting a promising avenue for future work on autonomous, machine-learning-based parameter tuning.
The analysis of energy consumption demonstrates the profound efficiency and superiority of the proposed hybrid system. As shown by our results, the protocol maintains a remarkably stable, high rate of energy savings, consistently exceeding 96.5% across all tested network densities from 50 to 500 vehicles. This stands in stark contrast to the ENDRE-VANET benchmark, whose efficiency is highly dependent on network scale, ranging from as low as 12% in sparse networks to a peak of only 87% at maximum density. This empirical validation validates that our protocol is not only significantly more energy-efficient—achieving substantial savings at all scales—but is also far more stable and predictable, making it a more robust solution for real-world ITS deployments.
Future Work of the Limitations
While this study demonstrates the significant performance benefits of the DHRP, it is essential to acknowledge its limitations, which in turn suggest promising avenues for future research. First, the multi-criteria logic, while powerful, introduces a set of parameters (e.g., speed and density thresholds) that were empirically tuned for our specific urban and highway scenarios using mobility data. Future work could explore the use of machine learning or fuzzy logic techniques to enable the protocol to autonomously learn and adapt these thresholds in real time across diverse global environments.
Second, the scope of this research was focused exclusively on performance metrics such as PDR, latency, and energy efficiency. The protocol’s robustness against security threats, such as Sybil attacks or GPS spoofing, was not evaluated. Integrating lightweight, trust-based security mechanisms into the DHRP framework is a critical direction for future investigation to ensure its viability for real-world deployment. Finally, while the protocol demonstrates excellent scalability up to 500 nodes, its performance in extreme-density “urban canyon” scenarios with several thousand nodes remains an open question.
5. Conclusion
This work presented a context-aware hybrid routing protocol for VANETs within ITS, integrating reactive AODV and proactive OLSR to tackle dynamic topologies, varying traffic densities, and stringent low-latency requirements. By strategically combining these paradigms, the protocol delivers reliable, real-time data exchange essential for safety-critical vehicular applications. Beyond VANETs, the protocol’s context-aware routing and adaptive resource management offer a blueprint for self-organising, sustainable wireless systems. Its hybridisation principles and energy-efficient design provide valuable insights for IoT and smart-city network deployments facing similar mobility and heterogeneity challenges. At its core, the protocol dynamically switches to AODV in low-density or low-mobility conditions— minimising control overhead—and to OLSR in high-density or high-mobility scenarios—ensuring pre-established, low-latency routes. A cross-layer power control module further optimises transmission strength (Eco, Standard, Boost modes) based on real-time node density and link quality. By intelligently selecting routing modes and adjusting power, the protocol consistently maintains packet delivery ratios above 90% and end-to-end delays under 40ms across all tested scenarios. This reliability and responsiveness meet the stringent URLLC requirements of modern ITS safety and infotainment services. Sustained high performance across diverse densities and mobility patterns enhances the operational reliability of ITS applications—such as collision avoidance, adaptive traffic signals, emergency vehicle prioritisation, and cooperative driving—by ensuring uninterrupted, timely data exchange. Adaptive power management yields up to 40% per-node energy savings, thereby extending the lifespans of communication modules and reducing operational costs. Predictable service levels are achieved without proportional infrastructure investment, facilitating compliance with sustainability objectives and more efficient maintenance scheduling. Extensive NS-3 (v3.36.1) simulations with SUMO-generated mobility traces (50–500 vehicles) confirmed the protocol’s superiority. It consistently outperformed benchmarks, achieving PDRs over 90% and energy reductions of 55–60%, even in dense urban and high-speed highway scenarios. By merging proactive and reactive routing with intelligent, context-based power control, this hybrid protocol establishes a new benchmark for scalable, energy-aware VANET communication. Its robust adaptability to real-world network states positions it as a compelling solution for next-generation ITS and broader wireless network infrastructures.
Author Contributions
Conceptualisation, B.G. and F.T.H.; Methodology, B.G.; Software, B.G.; Validation, B.G.; Writing – Original Draft, B.G.; Writing – Review & Editing, F.T.H.; Supervision, F.T.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability
The simulation data and SUMO mobility traces generated and analysed during the current study are available from the corresponding author on reasonable request.
Acknowledgements
I would like to thank Fatma Tansu Hocanın for their support.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Tamilarasi, A.; Sivabalaselvamani, D.; Loganathan, R.; Adhithyaa, N. A Hybrid Model for Performance Evaluation of Fixed VANETs using Novel 1C3N and Topology-Based Ad-Hoc Routing Protocols with Packet Loss Control Methods. Int. Res. J. Multidiscip. Technov. 2023, 5, 20–29.
- Abdu Jyothi, S.; Singla, A.; Godfrey, P.B.; Kolla, A. Measuring and understanding the throughput of network topologies. arXiv 2014, arXiv:1402.2531.
- Onuora, A.C.; Essien, E.E.; Ogban, F.U. An Adaptive Hybrid Routing Protocol for Efficient Data Transfer and Delay Control in Mobile Ad Hoc Network. Int. J. Eng. Trends Technol. 2023, 71, 251–258.
- AlDulaimi, A.M.K.; Abbas, F.H.; Mahdi, Q.S.; Alkhayyat, A.H.R.; Alsalamy, A.A. Effective neighbour discovery-based routing in emergency VANETs. In Proceedings of the 2023 6th International Conference on Engineering Technology and its Applications (IICETA), Najaf, Iraq, 13–14 September 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 324–329.
- Al-Ahwal, A. Performance prediction for AODV, AOMDV, and hybrid protocols in high-density networks. Eng. Res. J. (ERJ) 2022, 51, 152–162.
- Bengag, A.; Bengag, A.; Elboukhari, M. Routing Protocols for VANETs: A Taxonomy, Evaluation and Analysis. Adv. Sci. Technol. Eng. Syst. J. 2020, 5, 77–85.
- El-Dalahmeh, M.; El-Dalahmeh, A.; Adeel, U. Analysing the performance of AODV, OLSR, and DSDV routing protocols in VANET based on the ECIE method. IET Netw. 2024, 13, 377–394.
- Dinesh, D.; Deshmukh, M. Adaptive Hybrid Routing Protocol for VANETs. Int. J. Recent Innov. Trends Comput. Commun. 2017, 5, 1085–1091.
- Goswami, S.; Joardar, A.; Das, A.; Majumder, K. Performance analysis of three routing protocols in MANET using the NS-2 and ANOVA test. In Ad Hoc Networks; Mostafa, A., Ed.; IntechOpen: London, UK, 2017.
- Hameed, A.G.; Shaker, M.S. Vehicular Ad-hoc Network (VANET)—A Review. In Proceedings of the 2022 Iraqi International Conference on Communication & Information Technologies (IICCIT), Basrah, Iraq, 19–20 September 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 367–372.
- Jenila, B.S.; Ashvini, S. A Hybrid Routing Protocol for VANETs. Int. J. Innov. Res. Comput. Commun. Eng. 2014, 2, 5056–5061.
- Jabbar, W.; Malaney, R. Mobility Models and the Performance of Location-based Routing in VANETs. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 18 November–16 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–5.
- Kushwaha, U.S.; Jain, N.; Malviya, J.; Dhummerkar, M. Comparative Analysis of DSR, AODV, AOMDV, and AOMDV-LR in VANET by Increasing the Number of Nodes and Speed. Indian J. Sci. Technol. 2023, 16, 1099–1106.
- Kumar, R.; Hasan, M.; Padhy, S.; Evchenko, K.; Piramanayagam, L.; Mohan, S.; Bobba, R.B. End-to-End Network Delay Guarantees for Real-Time Systems using SDN. arXiv 2017, arXiv:1509.06969.
- Kumar, S.; Sharma, S.; Khan, S.; Singh, P.; Seema. SIMULATION-BASED PERFORMANCE EVALUATION OF VANET ROUTING PROTOCOLS UNDER INDIAN TRAFFIC SCENARIOS. ICIC Express Lett. 2022, 16, 67–74.
- Manhar, A.; Dembla, D. Routing optimising decisions in MANET: The enhanced hybrid routing protocol (EHRP) with adaptive routing based on network situation. Int. J. Recent Innov. Trends Comput. Commun. 2023, 11, 137–143.
- Majumder, S.; Bhattacharyya, D.; Chakraborty, S. Improvement of packet delivery ratio in MANET using ADLR: A modified regularisation-based Lasso regression. J. Adv. Inf. Technol. 2024, 15, 472–479.
- Mohi Uddin, K.M.; Islam, N.; Akhtar, J. Implementing the AODV routing protocol in VANET using SDN. Int. J. Comput. Appl. 2020, 175, 32–37.
- Ramamoorthy, R.; Naidu, R.C.A.; M S. Hybrid MultiHop Routing Mechanism with Intelligent Transportation System Architecture for Efficient Routing in VANETs. In Proceedings of the 2022 International Conference on Disruptive Technologies for Multi-Disciplinary (CENTCON), Mysuru, India, 23–25 November 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 69–74.
- Sahaya Jenila, B.; Ashvini, S. A Hybrid Routing Protocol for VANETs. Int. J. Innov. Res. Comput. Commun. Eng. 2014, 2, 5056–5061.
- Soomro, A.M.; et al. An Improved Hybrid Routing Approach for Disaster Management in MANET. In Proceedings of the 2023 IEEE International Conference on Engineering Sciences and Technologies (ICES&T), Karachi, Pakistan, 15–16 August 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–6.
- Kour, S.; et al. Comparative Analysis of Low and High Scalable VANET in terms of Receive Rate, Packets Received, MAC/PHY Overhead and Average Goodput. Procedia Comput. Sci. 2023, 230, 214–222.
- Sbayti, O.; Housni, K.; Hanin, M.; El Makrani, A. Comparative study of proactive and reactive routing protocols in vehicular ad-hoc networks. Int. J. Electr. Comput. Eng. (IJECE) 2023, 13, 5374–5387.
- Sharma, S.; Kour, S.; Sarangal, H. Modelling and Simulation of VANET Routing Protocols under Realistic Mobility Patterns. Research Square 2024, rs.3.rs-7463391.
- Vyas, A.; Puntambekar, S. Reactive & multipath routing with adaptive urban area vehicular traffic (AUAVT) in VANET environment. Int. J. Intell. Syst. Appl. Eng. 2024, 12, 802–810.
- Wei, W.; Wu, H.; He, Y.; Li, Q. A Multi-Objective Optimised OLSR Routing Protocol. PLoS ONE 2024, 19, e0301842.
Figure 1.
Dynamic Hybrid Routing Protocol.
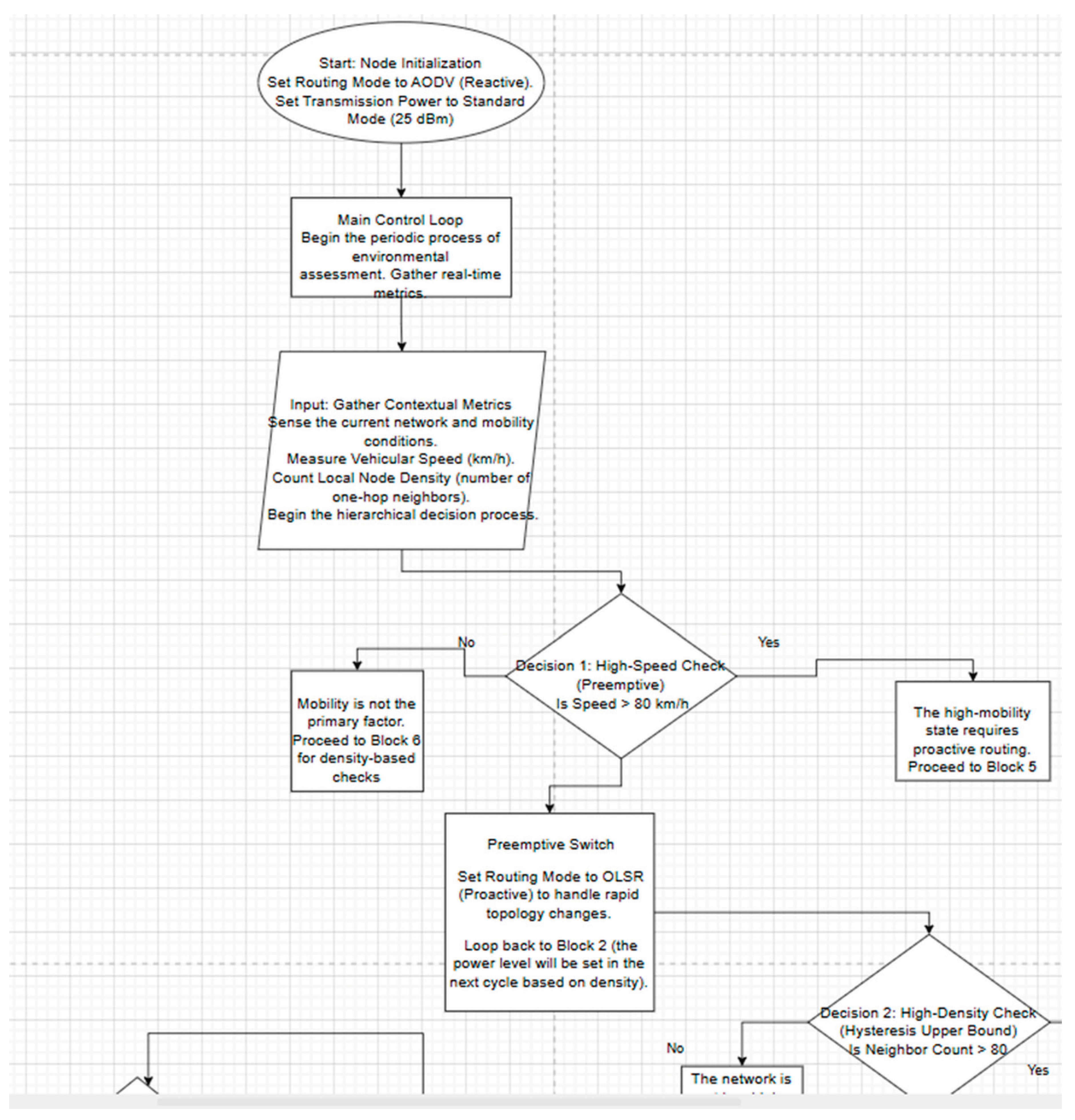
Figure 2.
Proposed Hybrid.
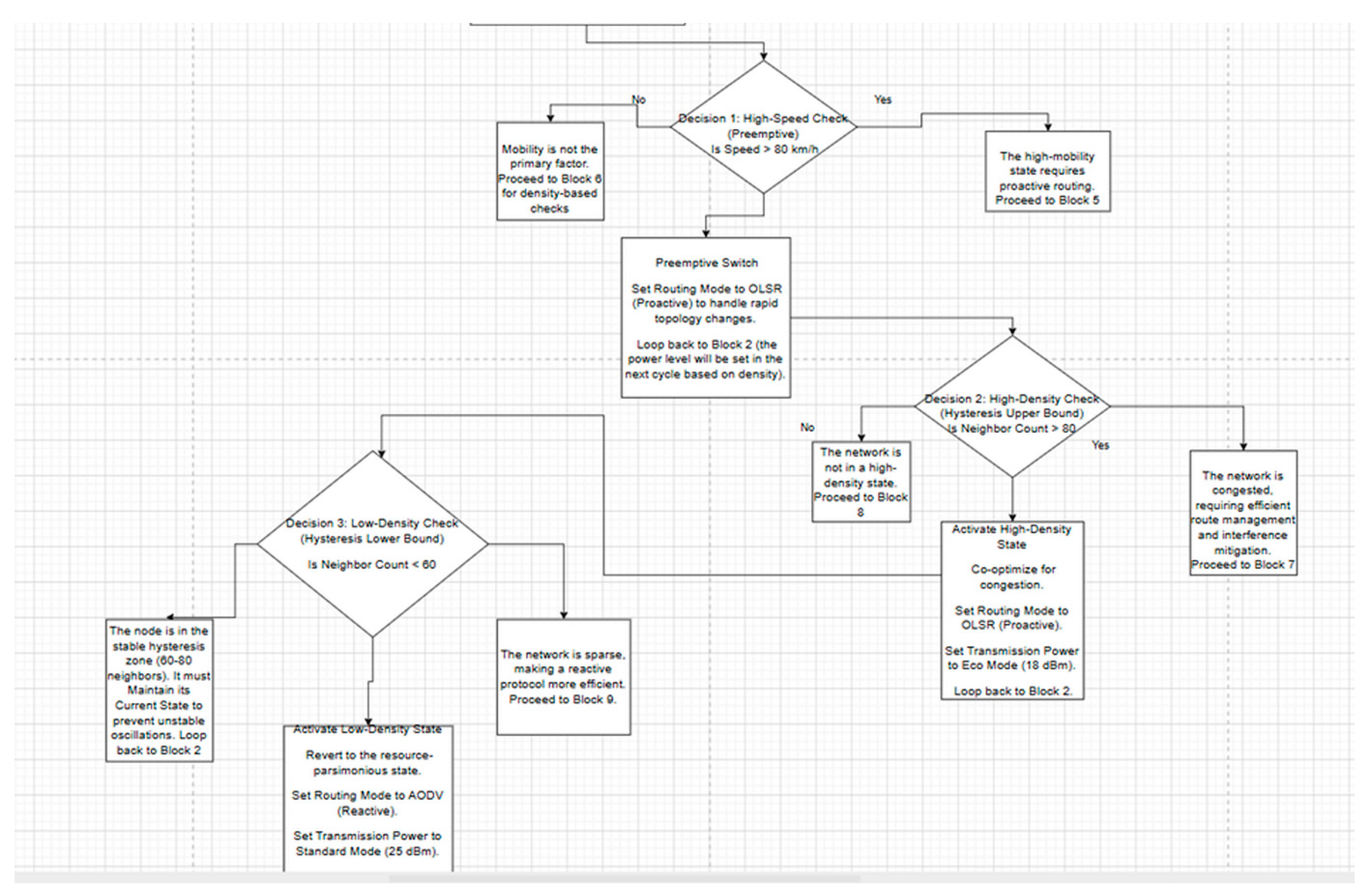
Figure 3.
Hybrid VANET routing dynamic power management.
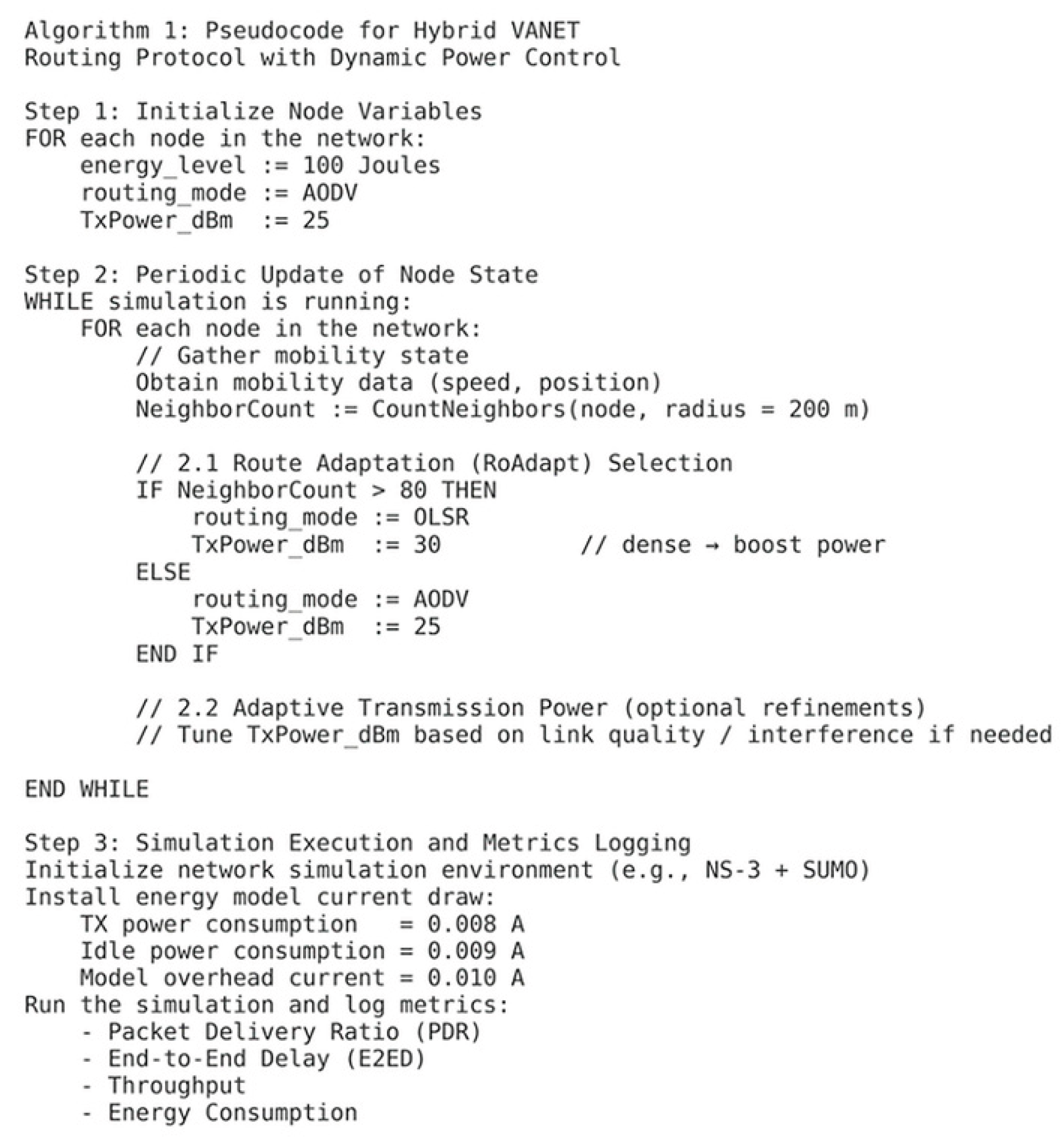
Figure 4.
Transmission power based on density.
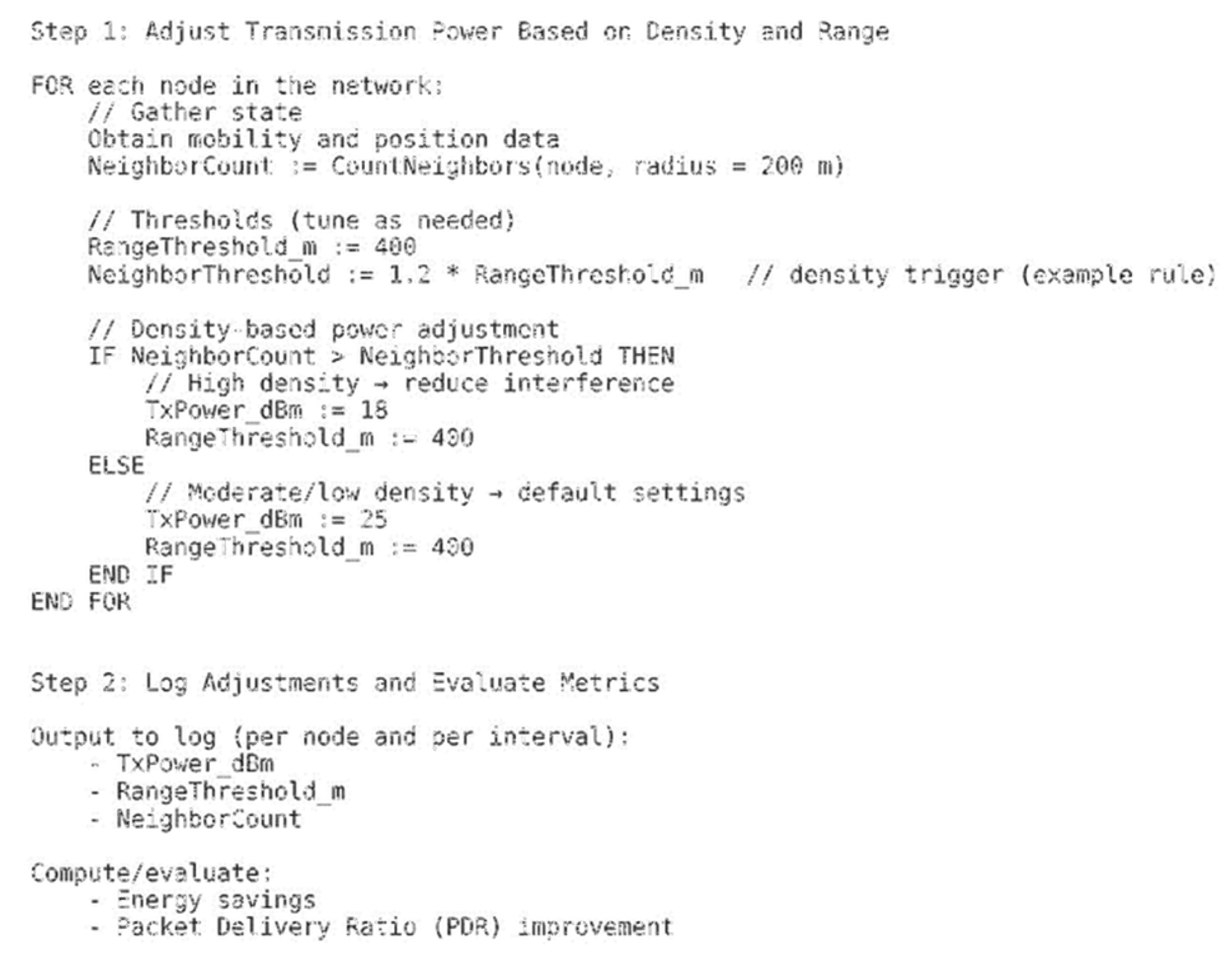
Figure 5.
Comparison of Packet Delivery Ratio (PDR) results.
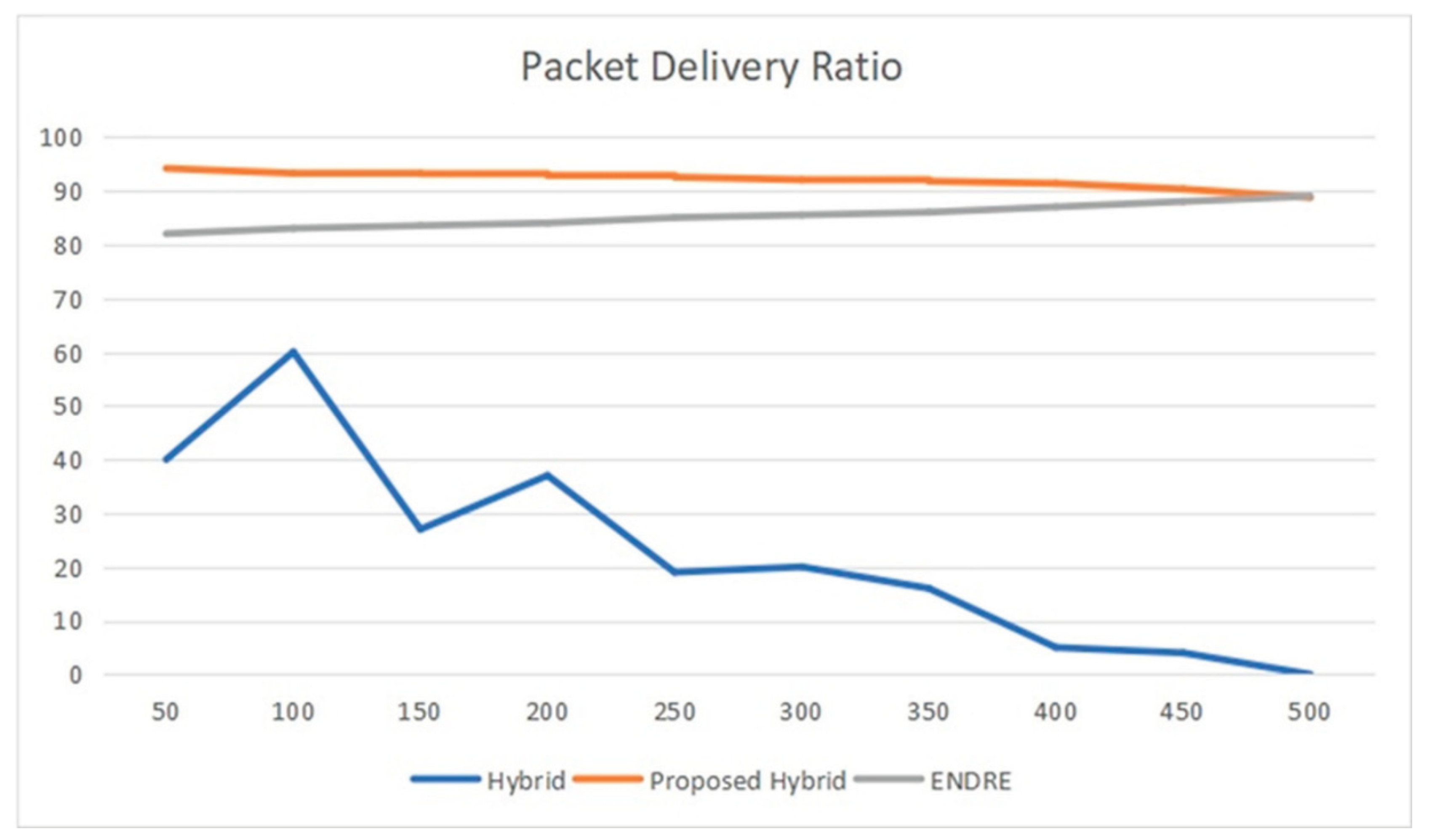
Figure 6.
Comparison of overhead results.
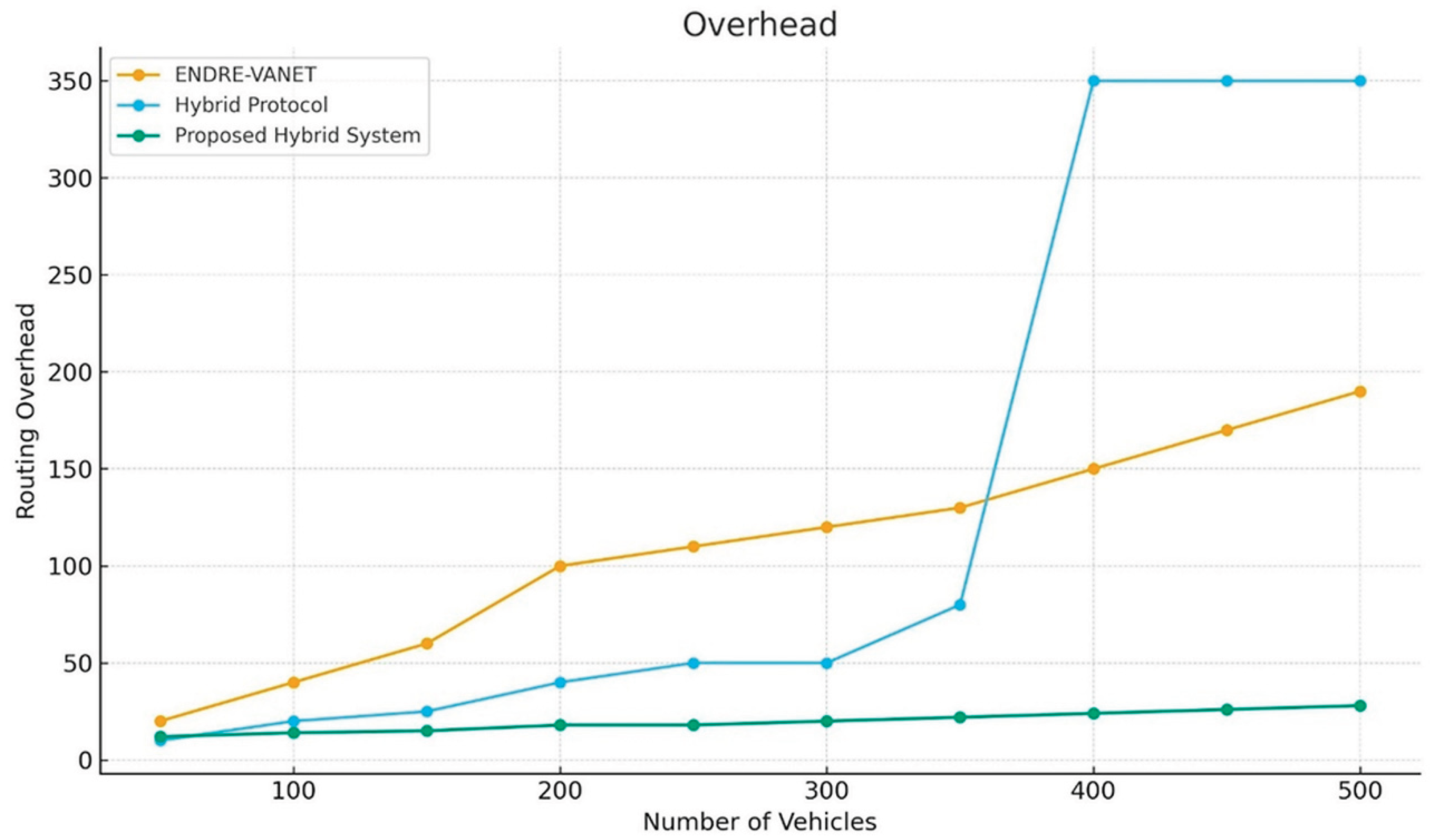
Figure 7.
Comparison of End-to-End Delay (E2ED) results.
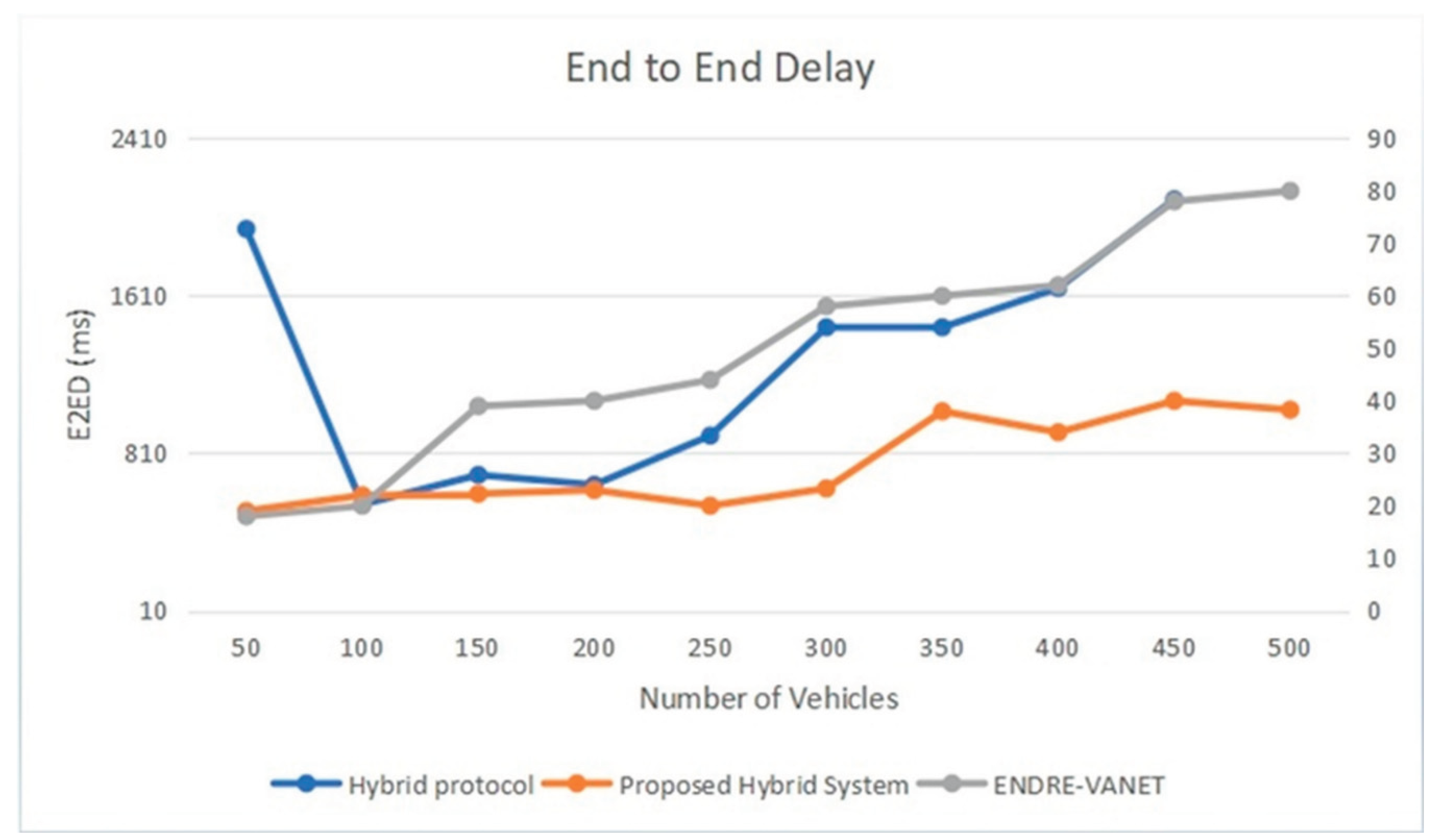
Figure 8.
Comparison of Average Throughput results.
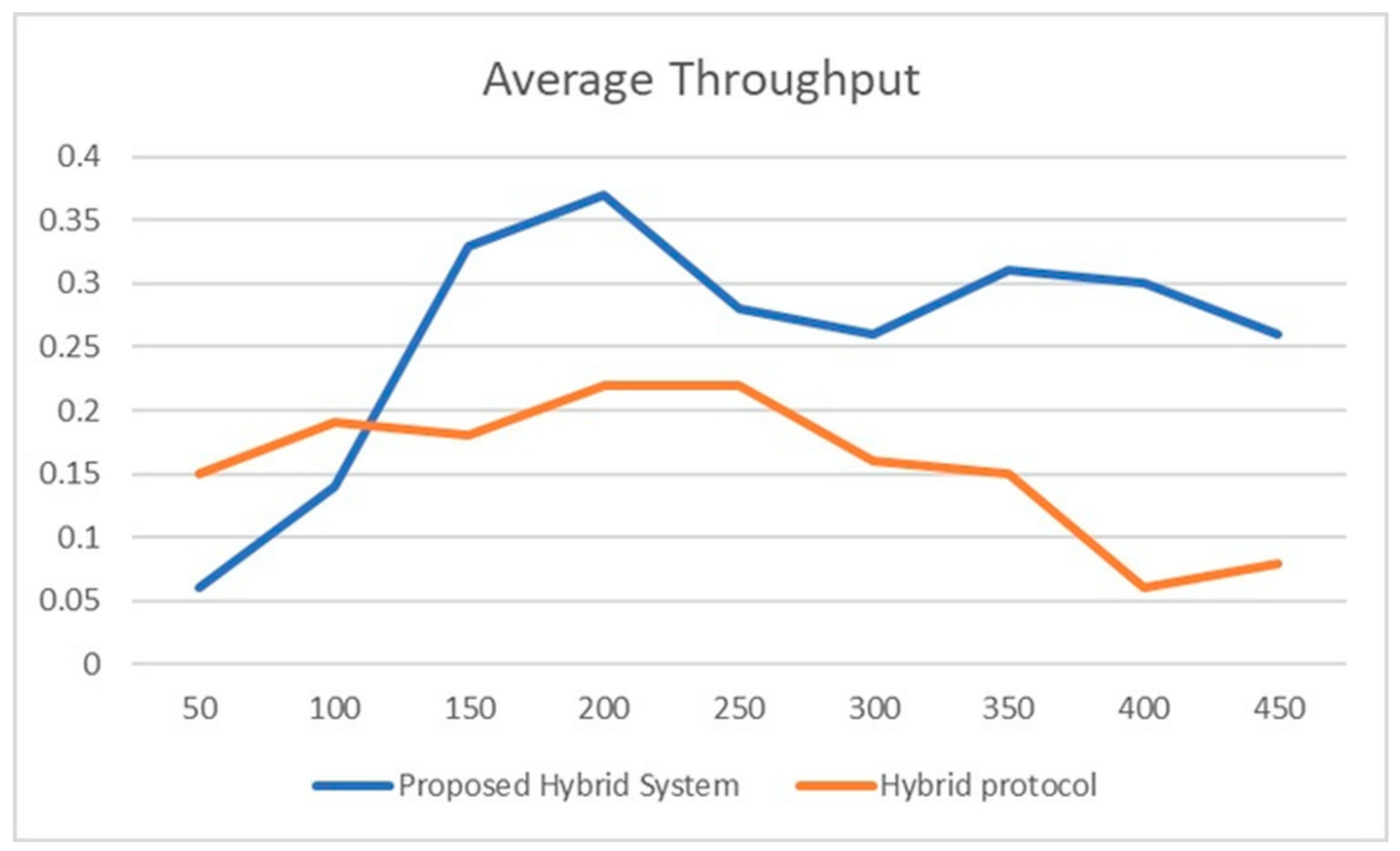
Figure 9.
Comparison of Energy Efficiency.
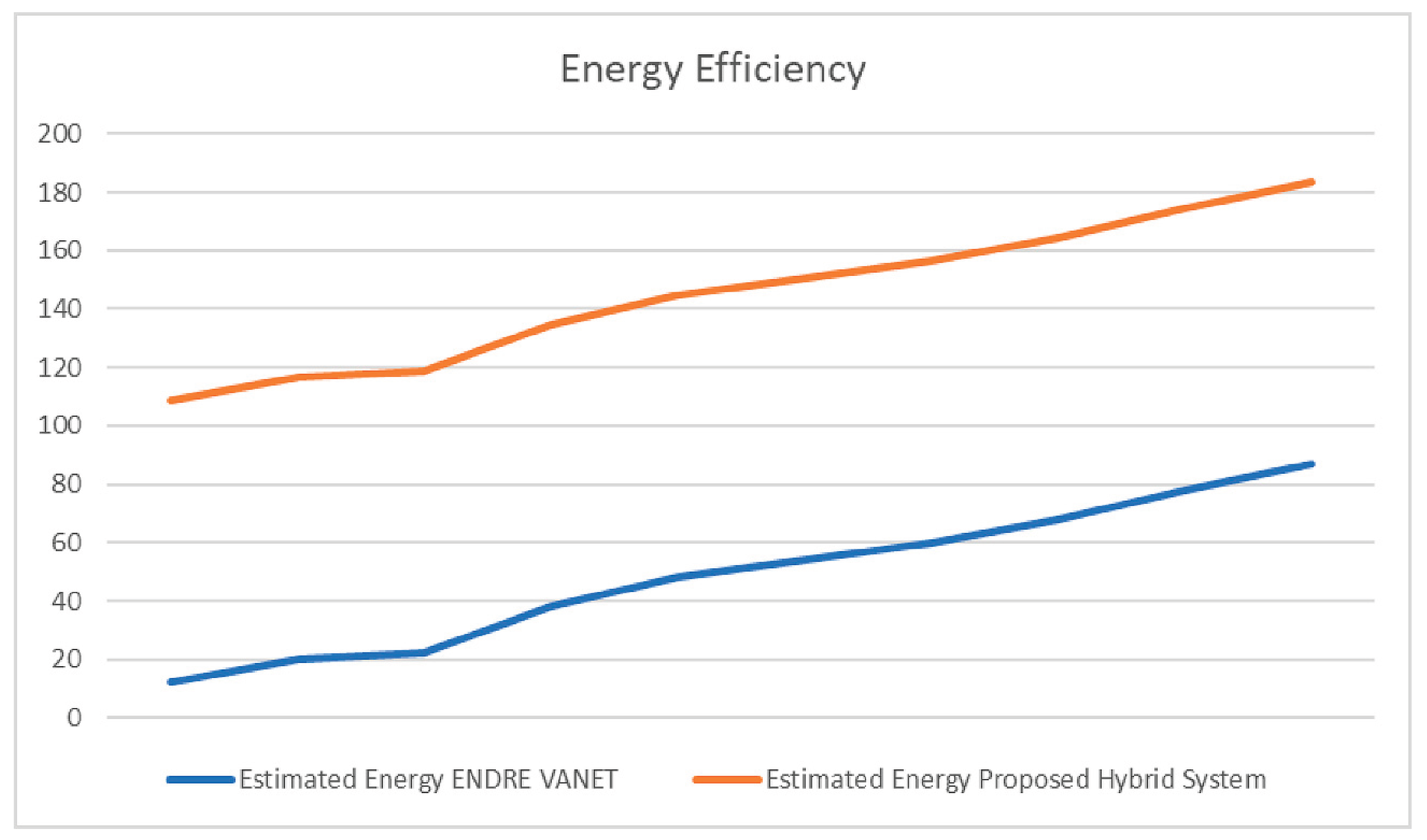

Table 1.
Comparative Analysis of State-of-the-Art Hybrid Protocols.
| Protocol Name | Year(s) of Publication | Primary Routing Components | Switching Logic / Novelty | Key Architectural Limitation | DHRP’s Superiority |
| DHRP (Proposed) | 2025 | AODV (Reactive) & OLSR (Proactive) | Hierarchical & Predictive: Speed (pre-emptive) → Hysteresis (Density 80/60). Synergistic Power Control. | Algorithmic Complexity; Parameter Tuning. | Unified, cross-layer control co-optimising routing and power management. |
| ENDRE-VANET [4] | 2023 | Hybrid (AODV/OLSR philosophy) | Static Thresholds: Switches based on fixed Density (e.g., 80) and Energy level. | Decoupled & Static: Routing and power are separate. Fixed thresholds lead to unstable oscillatory behaviour. | DHRP uses Hysteresis for stable transitions and synergistically integrates power into the routing decision. |
| EHRP [16] | 2023 | AODV, AOMDV, & OLSR Hybrid | Multi-Criteria: Adapts based on varying mobility levels and congestion states. | Network-Layer Only: Focuses primarily on optimising path selection but lacks dynamic physical-layer power control. | DHRP extends the multi-criteria approach by adding physical-layer power modulation to mitigate interference and improve energy efficiency. |
| AHR [1,5] | 2023/2022 | AODV for Discovery, OLSR’s MPRs for Forwarding | Reactive Congestion: Transitions to OLSR’s Multipoint Relays (MPRs) in response to congestion or link failures. | Limited Adaptivity & Decoupled: Power management is not a factor in routing decisions. Reactive nature causes latency in high-mobility contexts. | DHRP uses vehicular speed as a pre-emptive trigger to transition before congestion or link failure occurs, minimising latency. |
| Ramamoorthy et al. [19] | 2022 | Hybrid Multi-Hop Routing (ITS Architecture) | The system uses ITS data and architecture to perform high-level route selection efficiently. | High-Level Abstraction: Tends to decouple routing logic from real-time physical-layer adaptations, such as power control. | DHRP provides explicit, low-level power control, which is lacking in high-level architectural proposals, and directly tackles interference. |
Hysteresis is a control method using separate upper and lower thresholds (e.g., 80 and 60 neighbours) to prevent unstable oscillations between routing modes.
Table 2.
Correlation Between Local Node Density and Routing Protocol Activation.
| Node | Density | Neighbours | Protocols |
| Node 195 | HIGH DENSITY | 136 neighbours | Using OLSR |
| Node 92 | HIGH DENSITY | 136 neighbours | Using OLSR. |
| Node 238 | HIGH DENSITY | 136 neighbours | Using OLSR. |
| Node 13 | HIGH DENSITY | 108 neighbours | Using OLSR. |
| Node 99 | HIGH DENSITY | 102 neighbours | Using OLSR. |
| Node 150: | HIGH DENSITY | 102 neighbours | Using OLSR |
| Node 206 | HIGH DENSITY | 102 neighbours | Using OLSR |
| Node 391 | HIGH DENSITY | 102 neighbours | Using OLSR |
| Node 417 | HIGH DENSITY | 102 neighbours | Using OLSR |
| Node 90 | HIGH DENSITY | 136 neighbours | Using OLSR. |
| Node 196 | MODERATE DENSITY | 93 neighbours | No protocol change |
| Node 215 | MODERATE DENSITY | 93 neighbours | No protocol change |
| Node 252 | MODERATE DENSITY | 93 neighbours | No protocol change |
| Node 393 | MODERATE DENSITY | 93 neighbours | No protocol changes. |
| Node 413 | MODERATE DENSITY | 93 neighbours | No protocol change |
| Node 435 | MODERATE DENSITY | 93 neighbours | No protocol change |
| Node 10 | HIGH DENSITY | 135 neighbours | Using OLSR. |
| Node 432 | HIGH DENSITY | 107 neighbours | Using OLSR |
| Node 157 | HIGH DENSITY | 121 neighbours | Using OLSR |
| Node 404 | HIGH DENSITY | 121 neighbours | Using OLSR |
| Node 188 | HIGH DENSITY | 104 neighbours | Using OLSR |
| Node 26 | HIGH DENSITY | 140 neighbours | Using OLSR |
| Node 13 | HIGH DENSITY | 108 neighbours | Using OLSR |
| Node 259 | HIGH DENSITY | 136 neighbours | Using OLSR |
| Node 106 | HIGH DENSITY | 116 neighbours | Using OLSR |
| Node 13 | HIGH DENSITY | 108 neighbours | Using OLSR |
| Node 103 | HIGH DENSITY | 110 neighbours | Using OLSR |
“High density typically ≥100 neighbours; moderate around ~90.”.
Table 3.
Correlation Between Neighbour Density and Transmission Power Adjustment.
| Node ID | Number of Neighbours | Action Taken |
| 482 | 40 | Increasing power |
| 483 | 122 | Setting moderate power |
| 485 | 106 | Setting moderate power |
| 486 | 84 | Setting moderate power |
| 487 | 200 | REDUCING power |
| 488 | 123 | Setting moderate power |
| 489 | 86 | Setting moderate power |
| 490 | 186 | REDUCING power |
| 491 | 90 | Setting moderate power |
| 492 | 40 | Increasing power |
| 493 | 157 | REDUCING power |
| 494 | 42 | Increasing power |
| 495 | 154 | REDUCING power |
| 496 | 177 | REDUCING power |
| 497 | 97 | Setting moderate power |
| 498 | 138 | REDUCING power |
| 499 | 186 | REDUCING power |
Different power settings of the nodes.
Table 4.
Simulation parameters.
| Simulation parameters | Simulation Value |
| Simulator | NS-3 |
| Simulation time | 400 seconds |
| Traffic Type | TCP |
| Data Packet Size | 1024 bytes |
| Simulation Vehicles | 50-500 |
Table 5.
Comparative analysis of PDR.
| Number of Vehicles | Hybrid | Hybrid proposed | ENDRE |
| 50 | 40 | 94.16 | 82 |
| 100 | 60 | 93.25 | 83 |
| 150 | 27 | 93.18 | 83.5 |
| 200 | 37 | 92.84 | 84 |
| 250 | 19 | 92.55 | 85 |
| 300 | 20 | 92.05 | 85.5 |
| 350 | 16 | 91.78 | 86 |
| 400 | 5 | 91.36 | 87 |
| 450 | 4 | 90.31 | 88 |
| 500 | - | 88.73 | 89 |
Table 6.
Comparative analysis of overhead.
| Number of Vehicles | Hybrid | Proposed Hybrid | ENDRE-VANET |
| 50 | 10 | 10 | 20 |
| 100 | 20 | 15 | 40 |
| 150 | 25 | 20 | 60 |
| 200 | 40 | 22 | 100 |
| 250 | 50 | 25 | 110 |
| 300 | 75 | 28 | 120 |
| 350 | 80 | 30 | 130 |
| 400 | 350 | 32 | 150 |
| 450 | 350 | 35 | 165 |
| 500 | - | 38 | 180 |
Data is not available for hybrid 500 vehicles.
Table 7.
Comparison of Average Throughput.
| Number of Vehicles | Proposed Hybrid System (Throughput) | Hybrid Protocol (Throughput) |
| 50 | 0.06 | 0.15 |
| 100 | 0.14 | 0.19 |
| 150 | 0.33 | 0.18 |
| 200 | 0.37 | 0.24 |
| 250 | 0.28 | 0.24 |
| 300 | 0.26 | 0.16 |
| 350 | 0.32 | 0.15 |
| 400 | 0.31 | 0.06 |
| 450 | 0.26 | 0.08 |
Values are approximate as they were transcribed from the corresponding line graph for illustrative purposes. The units are Mbps.
Table 8.
Comparative analysis of the energy efficiency for the Proposed Hybrid System against the ENDRE-VANET.
Table 8.
Comparative analysis of the energy efficiency for the Proposed Hybrid System against the ENDRE-VANET.
| Number of Vehicles | Estimated Energy Efficiency (%) ENDRE VANET | Estimated Energy Efficiency (%) Proposed Hybrid System |
| 50 | 12 | 94.4889 |
| 100 | 20 | 96.5611 |
| 150 | 22 | 96.6121 |
| 200 | 38 | 96.5789 |
| 250 | 48 | 96.616 |
| 300 | 54 | 96.6082 |
| 350 | 60 | 96.5618 |
| 400 | 68 | 965754 |
| 450 | 78 | 96.5948 |
| 500 | 87 | 96.6118 |
The estimated energy efficiency of the proposed hybrid system is 96.611 at 500 vehicles, better than ENDRE VANET.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



