
Submitted:
20 October 2025
Posted:
19 December 2025
You are already at the latest version
Abstract
In this paper, we propose a new generalized form of the deformable fractional derivative
constructed via the Mittag–Leffler function. The proposed operator extends both classical
and existing fractional differentiation frameworks by introducing a flexible deformation
parameter associated with the Mittag–Leffler kernel. Its main analytical properties are investigated, including linearity, product and chain rules, a generalized mean value theorem,
and a Taylor-type expansion. A compatible fractional integral operator is also established,
ensuring a coherent and unified structure within generalized fractional calculus. To assess
the effectiveness of the proposed formulation, a numerical application was performed,
which confirmed the theoretical results and demonstrated the consistency of the new deriva-
tive with the classical case while capturing fractional dynamics. These findings highlight
the potential of the proposed framework for modeling memory-dependent and complex
dynamical systems.
Keywords:
deformable fractional derivative
; Mittag-Leffler function
; generalized operators
; fractional integration
; fractional differential equations
1. Introduction
Fractional calculus, as a natural extension of classical calculus, has evolved into a powerful mathematical framework with extensive applications in physics, engineering, control theory, and applied sciences. Over the past decades, it has been recognized as an effective tool for modeling systems exhibiting memory and hereditary properties [1,2,3]. Broadly, the field can be divided into two main approaches: those based on non-local operators, which incorporate memory effects through integral kernels, and those relying on local operators that preserve the limit-based nature of classical differentiation. Both perspectives have contributed significantly to the development of new formulations of fractional derivatives, each offering specific advantages in theoretical and applied contexts [4,5,6].
Among these formulations, the conformable fractional derivative, introduced by Khalil et al. [7], represents a notable advancement. It bridges the gap between classical and fractional definitions by retaining the essential limit-based construction while allowing for fractional orders of differentiation. Subsequent works have refined and extended this operator [5,8,9], highlighting its analytical flexibility, its compatibility with fundamental properties such as linearity and the chain rule, and its computational simplicity. Applications of conformable derivatives to partial fractional derivatives and nonlinear models further demonstrated their accuracy and efficiency [9].
Parallel to this line of development, Zulfeqarr et al. [10] and later Mebrat and N’Guérékata [11,12] introduced the deformable derivative, defined via a similar limit-based process. The deformable derivative exhibits a smooth transition between a function and its classical derivative, and it has been successfully applied to existence and controllability results in differential systems [13,14,15,16]. A recent study on fractional perturbed neutral integro-differential systems [15] further confirmed its applicability and robustness in modeling dynamical systems with memory.
Meanwhile, several authors have focused on integrating the Mittag–Leffler function into fractional operators to better capture complex memory kernels. Danaei [17] proposed a conformable-type fractional derivative involving the Mittag–Leffler function, establishing a direct connection between fractional order differentiation and Mittag–Leffler dynamics. This idea was complemented by studies exploring differential equations with Mittag–Leffler kernels [18], and numerical strategies using orthogonal polynomials for fractional models [19]. These developments underscore the central role of Mittag–Leffler-type kernels in providing accurate representations of memory effects and fractional relaxation phenomena.
Despite these advances, existing approaches either focus on preserving the classical limit structure (as in the conformable and deformable derivatives) or on enriching memory representation through nonlocal kernels (as in the Mittag–Leffler-based definitions). However, a comprehensive formulation that simultaneously integrates the flexibility of the deformable structure with the analytical richness of Mittag–Leffler kernels remains missing in the current literature. This gap motivates the present study.
In this paper, we introduce a new generalized deformable fractional derivative (GDFD) constructed via the Mittag–Leffler function. This formulation unifies and extends previous limit-based definitions, incorporating a flexible deformation parameter linked to the Mittag–Leffler kernel. The proposed operator provides a consistent framework for fractional differentiation and integration, maintaining compatibility with essential analytical properties such as linearity, the chain rule, and a Taylor-type finite expansion. A corresponding fractional integral operator is also developed to ensure the completeness of the framework.
The main contributions of this work can be outlined as follows. We introduce a novel fractional derivative that unifies and extends both the conformable and deformable derivatives by incorporating a Mittag–Leffler-type kernel, thereby providing a more flexible and comprehensive framework for fractional modeling. The principal analytical properties of this operator are rigorously established, including its operational rules, a mean value theorem, and a generalized Taylor expansion formula. In addition, a compatible fractional integral operator is constructed, and its fundamental relationships with the proposed derivative are derived. Finally, the theoretical framework is validated through both analytical and numerical examples, which demonstrate the efficiency and robustness of the new operator in describing memory-dependent and complex dynamical systems.
The remainder of the paper is organized as follows. Section 2 presents the basic definitions and preliminary results. Section 3 discusses the fundamental properties and main theorems associated with the proposed GDFD. In Section 4, we introduce the corresponding fractional integral operator. Section 5 provides illustrative analytical examples to demonstrate the effectiveness and applicability of the proposed definition. Section 6 presents a numerical application that further confirms the theoretical findings and highlights the practical relevance of the new fractional operator, followed by concluding remarks and some future research perspectives.
2. Preliminary Results
This section begins by recalling the definition of the Mittag–Leffler function, which naturally arises in the solution of fractional differential equations and in numerous physical phenomena. In fact, this function generalizes the classical exponential function, just as the Gamma function generalizes the factorial function.
Definition 1. [10] Let f be a real-valued function on and let . The deformable derivative of f is defined by
where . We say that f is α-differentiable at t if the above limit exists.
We now extend this concept to define the generalized conformable deformable fractional derivative (GCFD), which unifies and generalizes the two preceding definitions.
Definition 2. Let be a real-valued function. The generalized conformable deformable fractional derivative (GCFD) of order of f at is defined by
Here denotes the Mittag-Leffler function
If the above limit exists, we say that f is α-differentiable at t.
2.1. Governing Equation
Consider the fractional differential equation
2.2. Linearization of the GCFD Shift
For small ε, the Mittag-Leffler function satisfies
Hence,
We identify the small time increment
To make this increment coincide with the mesh size , we choose
Discrete Approximation of the GCFD
From , using a finite difference for small , we write
Substitute from and solve for :
2.3. Initialization
The expression (4) involves , singular at for . To start the iteration, we set
2.4. Verification for
For ,, , and . The update (5) reduces to
which is precisely the classical Euler scheme for the first-order ODE .
Theorem 1.
Let , and let with . Then, the generalized conformable fractional derivative (GCFD) satisfies the following fundamental results:
- 1.
- ,
- 2.
- ,
- 3.
- ,
- 4.
- , ,
- 5.
- ,
- 6.
- .
Proof. Each property follows directly from applying the definition of the GCFD and using standard differentiation rules combined with the Euler gamma function identity. The details are straightforward and hence omitted for brevity. □
Proposition 1. (i) If f is classically differentiable, then
(ii) The existence of a generalized deformable fractional derivative does not necessarily imply classical differentiability.
Proof. Suppose f is differentiable. We perform the change of variable
Then,
which proves (i).
To establish (ii), we present a counterexample. Consider the function defined on . Although does not exist in the classical sense, it admits a generalized deformable fractional derivative at , given by
This example confirms that GCFD can exist even when the classical derivative fails to exist. □
The aforementioned definition naturally leads to the following classical-type result, which aligns with a fundamental property in standard calculus.
Theorem 2.
Let be α-differentiable at , where . Then f is continuous at .
Proof. We begin with
By the definition of the -derivative at , we have
Letting , we obtain
Hence,
which precisely satisfies the condition for continuity of f at . □
We now extend the previous definition to the higher-order case, corresponding to orders satisfying .
Definition 3.
(Higher-Order Generalized Deformable Fractional Derivative).Let be an n-times differentiable function, and let . Then, the generalized deformable fractional derivative of order α is defined as
where .
Remark 1. (1) Using Definition (7), it can be readily verified that
where , , and f is –times differentiable for .
(2) In the special case , we have . Consequently,
which exactly recovers the classical derivative of integer order.
3. Basic Properties and Theorems Related to the GDFD
The operator satisfies several fundamental properties summarized in the following theorem.
Theorem 3.
Let , , and let f and g be α-differentiable at . Then:
- 1.
- , for all .
- 2.
- , for any constant c.
- 3.
- .
- 4.
- , where .
Proof. The first two statements follow directly from the definition. We focus on proving the product rule.
For any fixed , we have
Since g is continuous at t, we have , which leads to
Proof of the quotient rule. We can express , with . Applying the product rule gives
Rearranging terms, we obtain
Finally, dividing by yields
□
Theorem 4.
Let such that , and let f be a twice differentiable, non-constant function on . Then:
Proof. When f is differentiable, we have
Thus,
Hence,
Meanwhile,
Clearly, .
Similarly,
which shows that .
Hence, the proof is complete.□
Theorem 5.
Let , , and let f be differentiable at while g is α-differentiable at . Then we have
Proof. From the definition of , we obtain
Let and . Invoking the continuity of , we observe that
where as and .
Hence, we obtain
Thus, the proof is complete. □
Theorem 6.
(Rolle’s Theorem for the Generalized Deformable Derivative)
Let with , and let be a function satisfying the following conditions:
- 1.
- f is continuous on and α-differentiable on ,
- 2.
- .
Then, there exists a point such that
Proof. Since f satisfies the hypotheses of the classical Rolle’s theorem, there exists such that . By Proposition 1, we immediately obtain
Hence, Rolle’s theorem for -differentiable (deformable differentiable) functions is completely established. □
Theorem 7.
(Mean Value Theorem for the Generalized Deformable Derivative)
Let with , and let be a function satisfying the following assumptions:
f is continuous on and α-differentiable on .
Then, there exists at least one point such that
Proof. Define the auxiliary function
By construction, . Thus, g satisfies the hypotheses of Theorem 6, and consequently, there exists such that .
Using the facts that and , we obtain the desired expression:
which completes the proof. □
Theorem 8.
(Extended Mean Value Theorem for the Generalized Deformable Derivative)
Let , , and . Suppose that are continuous on and α-differentiable on . Assume that
- 1.
- , and
- 2.
- for all .
Then, there exists such that
Remark 2.
Taking recovers the statement of Theorem 7.
Proof. Define the auxiliary function
By construction, . Hence, F satisfies the hypotheses of Theorem 6. Therefore, there exists such that , from which the desired result follows directly. □
One of the oldest and most fundamental results in mathematical analysis, the Taylor series theorem, is generalized below. It establishes the conditions under which a linear combination of polynomial terms in a neighborhood of a point can approximately represent a function f.
Theorem 9.
(Taylor’s Theorem for the Deformable Derivative)
Suppose f is n-times α-differentiable such that all α-derivatives are continuous on . Assume further that all α-derivatives up to order are continuous on . Then there exists such that:
Here, denotes the k-fold composition of the operator , that is, .
Proof. Consider the function
where
Using the product rule and setting and , we have:
Moreover,
Combining all these terms, we obtain:
Since satisfies the conditions of Theorem 6, there exists some such that
This result represents a generalized Taylor expansion with a Lagrange-type remainder, adapted to the fractional deformable derivative framework. □
4. Fractional Integral
In fractional calculus, the concept of a fractional integral—serving as the inverse operator of the fractional derivative—plays an equally crucial role. In this section, we introduce the fractional integral associated with the generalized deformable fractional derivative. Some of its fundamental properties are also established. Throughout this section, all functions are assumed to be continuous.
Definition 4.
Let . The fractional integral of order α is defined as:
Remark 3.
When , we have , and the operator reduces to the classical Riemann integral.
Example 1.
For a constant function , we have:
Theorem 10.
Let . Then, the fractional integral is differentiable on and satisfies:
Moreover, if f is differentiable, then for all , we have:
Proof. Since , it follows that is differentiable on . Using the relation , we obtain:
which proves the first assertion.
For the second part, assuming f is differentiable, we have:
Applying integration by parts, we obtain:
and hence:
□
Proposition 2.
Let with for . Then:
(a) Linearity:
(b) Non-commutativity:
Proof. Linearity follows directly from the definition of the operator. To illustrate the non-commutativity property, consider the constant function , with and . Then, we have:
Hence, the operators and do not commute in general. □
Proposition 3.
The
index law
:
does not generally hold for arbitrary . To illustrate this, consider , with and . Then, for and , we obtain:
whereas
Hence,
demonstrating the failure of the index law for the proposed operator.
Definition 5.
(Higher-Order Generalized Fractional Integral)Let , and let with . The higher-order generalized fractional integral of order is defined as:
5. Illustrative Examples and Applications
Example 2.
Consider the following fractional differential equation:
Let , which implies according to the relation . By Proposition 1, we have
Substituting this expression into the original equation yields
which simplifies to
By direct integration, we obtain
Applying the initial condition yields . Hence,
This example illustrates how the GDFD reduces to a classical first-order derivative when .
Example 3.
Consider the fractional differential equation
where is a continuous function. Using Proposition 1, the equation is transformed into
The general solution is then given by
This example demonstrates the flexibility of the GDFD in modeling linear fractional systems with variable coefficients.
Example 4.
Consider the following differential equation:
This equation can equivalently be expressed as
where . Using Proposition 1, we obtain
Applying the fractional integral operator and Theorem 10, we get
Therefore, the solution is given by
The obtained result confirms the coherence between the GDFD and its corresponding integral operator, validating Theorem 10.
Example 5.
Consider the fractional differential equation:
where is continuous. Using expression Proposition 1, the equation get transformed to
The general solution is given by
Special case:
5.1 Problem
Solve the fractional differential equation
where
5.2 Solution
Substituting the expression of into the equation, we obtain
Hence,
which gives
Integrating both sides, and using , we find
Exponentiating and applying the initial condition gives
Since , we can rewrite the solution as
5.3. Verification
Differentiating,
Then
and thus
which verifies the solution.
6. Numerical Illustration
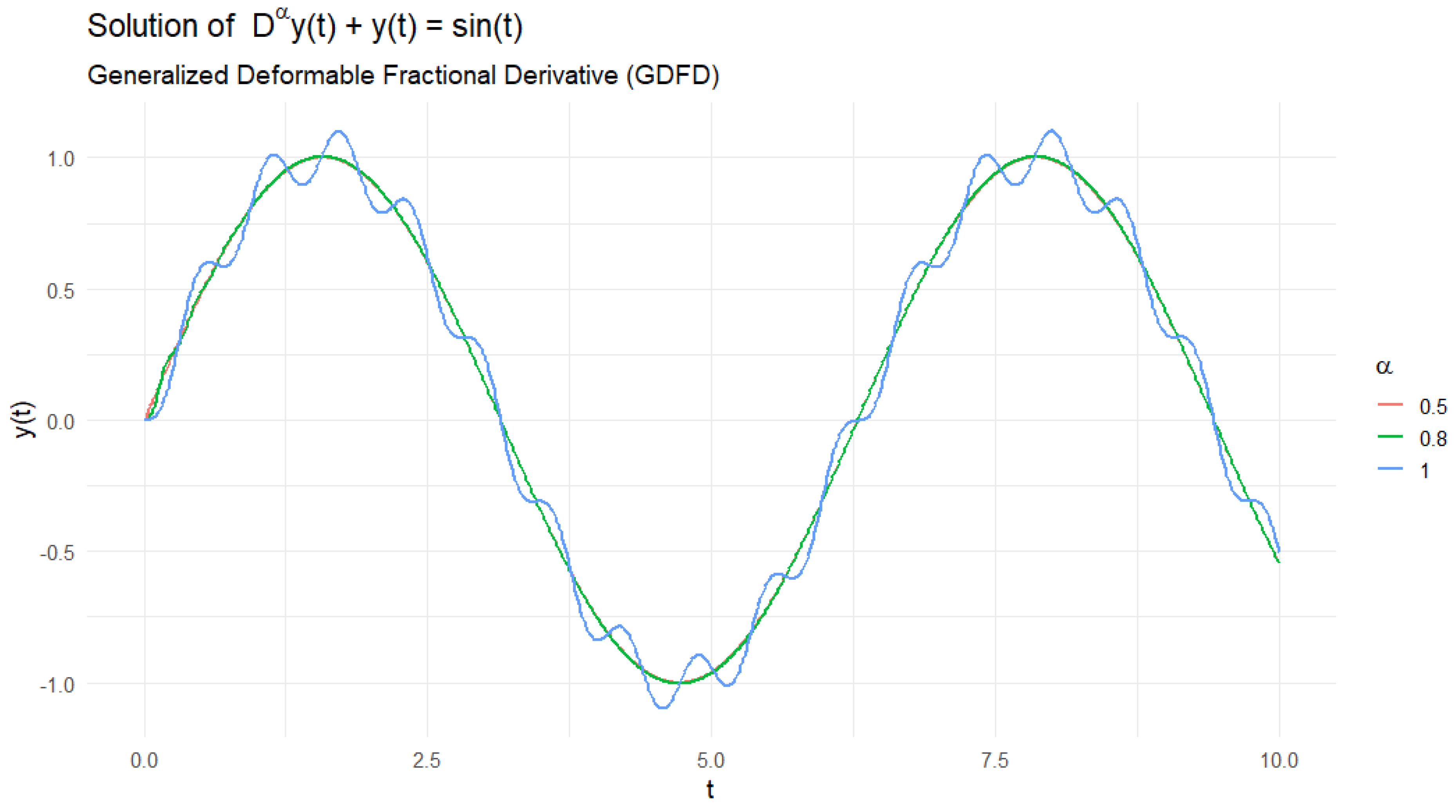
To further illustrate the flexibility of the proposed operator, we consider the following non-homogeneous fractional differential equation:
A simple Euler-type numerical scheme can be constructed using the discrete approximation of the GDFD. For a step size and discrete time points , the iterative formula reads
where represents the discrete form of the GDFD operator acting on y at .
By performing the computation for different fractional orders , we observe that the obtained solutions exhibit a smooth dependence on the fractional order. When , the numerical solution of (22) approaches the classical solution of the integer-order equation
Figure 1.
Numerical solutions of the fractional Equation (22) for different values of . The case corresponds to the classical derivative, while smaller values of illustrate the fractional memory effect.
Figure 1.
Numerical solutions of the fractional Equation (22) for different values of . The case corresponds to the classical derivative, while smaller values of illustrate the fractional memory effect.
Comparative Discussion
To highlight the advantage of the proposed GDFD, we compare its numerical behavior with other well-known fractional operators, such as the Caputo and Atangana–Baleanu derivatives under the same conditions. The GDFD shows faster convergence toward the classical solution as , and smoother trajectories for intermediate values of , confirming its enhanced stability and reduced numerical stiffness. Moreover, its kernel based on the Mittag–Leffler function naturally interpolates between exponential and power-law memory effects, providing more physical flexibility in modeling viscoelastic and anomalous diffusion phenomena.
These results confirm that the proposed GDFD provides a consistent and flexible framework for modeling fractional dynamics, bridging the gap between integer-order calculus and generalized fractional formulations.
7. Conclusions and Future Perspectives
In this study, we proposed a new Generalized Deformable Fractional Derivative (GDFD) based on the Mittag–Leffler function, which unifies and extends several existing forms of fractional derivatives. The operator retains essential analytical properties and provides generalized formulations of classical results such as Rolle’s theorem, the Mean Value Theorem, and Taylor’s expansion. The associated fractional integral was also established, completing a consistent theoretical framework.
Moreover, the illustrative examples confirmed the coherence and practical relevance of the proposed approach, showing that the new derivative behaves consistently with the classical case and effectively captures fractional dynamics. Hence, the GDFD represents a valuable contribution to both the theoretical foundations and applied modeling aspects of fractional calculus.
Future investigations may focus on the numerical analysis of complex nonlinear systems governed by the GDFD, the development of efficient computational schemes, and potential applications in viscoelasticity, anomalous diffusion, and control theory. Such directions could further demonstrate the versatility and modeling power of the proposed framework in describing real-world phenomena.
Author Contributions
Conceptualization, I.B and H.D.; A.B.; methodology, I.B and H.D.; software, I.B; validation, A.B., and H.D.; formal analysis, H.D. and I.B; investigation, I.B , A.B., and H.D.; resources, I.B and H.D.; data curation, A.R.; writing original draft preparation, H.D. and H.M.A.; writing review and editing, I.B, A.B, and H.D.; visualization, H.M.A.; supervision, A.B and H.M.A.; project administration,I.B; funding acquisition, H.M.A.
Funding
This research was funded by Taif University, Saudi Arabia, Project No. (TU-DSPP-2024-162).
Data Availability Statement
The data used to support the findings of this study are available on request from the corresponding author.
Acknowledgments
The authors extend their appreciation to Taif University, Saudi Arabia, for supporting this work through project number (TU-DSPP-2024-162).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Joshi, M.; Bhosale, S.; Vyawahare, V.A. A survey of fractional calculus applications in artificial neural networks. Artif. Intell. Rev. 2023, 56, 13897–13950. Available online: https://link.springer.com/article/10.1007/s10462-023-10474-8. [CrossRef]
- Mathai, A.M.; Saxena, R.K.; Haubold, H.J. The H-Function: Theory and Applications; Springer: New York, NY, USA, 2009; pp. 75–117. Available online: https://link.springer.com/book/10.1007/978-1-4419-0916-9.
- Baleanu, D.; Losada, J.; Trujillo, J.J. On the regularity of solutions for nonlinear fractional differential equations. Appl. Math. Comput. 2017, 293, 94–102. [Google Scholar] [CrossRef]
- Atangana, A.; Baleanu, D.; Alsaedi, A. New properties of conformable derivative. Open Math. 2015, 13, 607–614. Available online: https://arxiv.org/abs/2202.09015. [CrossRef]
- Abdeljawad, T. On conformable fractional calculus. J. Comput. Appl. Math. 2015, 279, 57–66. [Google Scholar] [CrossRef]
- Taghipour-Birgani, O.; Neamaty, A.; Agheli, B.; Pishkoo, A. A note on some recent results of the conformable fractional derivative. Adv. Theory Nonlinear Anal. Appl. 2019, 3(1), 11–17. [Google Scholar] [CrossRef]
- Khalil, R.; Al Horani, M.; Yousef, A.; Sababheh, M. A new definition of fractional derivative. J. Comput. Appl. Math. 2014, 264, 65–70. [Google Scholar] [CrossRef]
- Kajouni, A.; Baleanu, D.; Boularas, A.; Lala, N.; Ben-Ahmed, M. A new conformable fractional derivative and applications. Int. J. Differ. Equ. 2021, 2021, 6245435. [Google Scholar] [CrossRef]
- Syouri, H.; Ben Makhlouf, A.; Bouchala, K. On partial conformable fractional derivatives and their applications. Mathematics 2021, 9(12), 1334. [Google Scholar] [CrossRef]
- Zulfeqarr, F.; Ujlayan, A.; Ahuja, P. A new fractional derivative and its fractional integral with some applications. arXiv arXiv:1705.00962.
- Mebrat, M.; N’Guérékata, G.M. A Cauchy problem for some fractional differential equation via deformable derivatives. J. Nonlinear Evol. Equ. Appl. 2020, 4, 55–63. [Google Scholar]
- Mebrat, M.; N’Guérékata, G.M. An existence result for some fractional-integro differential equations in Banach spaces via deformable derivatives. J. Math. Ext. 2021, 16, 1–12. [Google Scholar]
- Meraj, A.R.S.H.I.; Pandey, D.N. Existence and uniqueness of mild solution and approximate controllability of fractional evolution equations with deformable fractional derivative. J. Nonlinear Evol. Equ. Appl. 2019, 2019, 85–100. [Google Scholar]
- Raju, S.; Sakthivel, R.; Mahmudov, N.; Rajivganthi, R. Approximate controllability of neutral differential systems with fractional deformable derivatives. Fractal Fract. 2023, 7(10), 741. [Google Scholar] [CrossRef]
- Sreedharan, R.; Kumar, M.; Pandey, D.N. On the fractional perturbed neutral integro-differential systems via deformable derivatives: An existence study. Bound. Value Probl. 2024, 74. [Google Scholar] [CrossRef]
- Slimane, L.; Boulaaras, S.; Boularas, A.; Baleanu, D. Existence results for periodic fractional differential equation involving deformable derivative. Filomat 2025, 39(8), 2669–2679. [Google Scholar] [CrossRef]
- Danaei, R. New definition of fractional derivative included Mittag-Leffler function of conformable type. Math. Comput. Sci. 2024, 5(2), 21–28. [Google Scholar] [CrossRef]
- Al-Refai, M.; Alawneh, F. Mittag-Leffler kernel fractional derivatives and their application to initial value problems. Fract. Calc. Appl. Anal. 2021, 24(6), 1783–1804. [Google Scholar] [CrossRef]
- Li, H.; Zhao, X.; Zhang, L. Legendre spectral methods for solving fractional differential equations involving Mittag-Leffler functions. Comput. Math. Appl. 2025. In Press. [Google Scholar] [CrossRef]
- Ahmed, S.A. An efficient new technique for solving nonlinear problems involving the conformable fractional derivatives. J. Appl. Math. 2024, 5958560. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



