Submitted:
02 September 2025
Posted:
04 September 2025
You are already at the latest version
Abstract
The swift integration of AI, robotics, and advanced sensing technologies has revolutionized agriculture into a data-centric, autonomous, and sustainable sector. This systematic study examines the interplay between artificial intelligence and agricultural robotics in intelligent farming systems. Artificial intelligence, machine learning, computer vision, swarm robotics, and generative AI are analyzed for crop monitoring, precision irrigation, autonomous harvesting, and post-harvest processing. Employing PRISMA to categorize more than 10,000 high-impact publications from Scopus, WoS, and IEEE. Drones and vision-based models predominate the industry, while IoT integration, digital twins, and generative AI are on the rise. Insufficient field validation rates, inadequate crop and regional representation, and the implementation of explainable AI continue to pose significant challenges. Inadequate model generalization, energy limitations, and infrastructural restrictions impede scalability. We identify solutions in federated learning, swarm robotics, and climate-smart agricultural artificial intelligence. This paper presents a framework for inclusive, resilient, and feasible AI-robotic agricultural systems.
Keywords:
artificial intelligence
; robotics
; smart agriculture
; autonomous systems
; generative AI
1. Introduction
In the last century, global agriculture faces tremendous challenges. Growing populations, climate change, limited natural resources, and growing socio-economic landscapes require more efficient, resilient, and sustainable food systems [1,2]. The global food production will need to increase 70% by 2050 to fulfill population needs, according to the FAO [3,4]. Traditional farming practices, while essential, generally rely on manual labor and reactive decision-making that are unsuitable for today’s complex agricultural reality [5]. While necessary, traditional farming practices typically involve manual labor and reactive decision-making, which are unsuitable for today’s complex agricultural landscape [5]. This context can be transformed by AI and robotics [6]. These technologies facilitate precision and automation throughout all phases of the agricultural cycle, i.e., soil monitoring, planting, crop management, harvesting, and post-harvest logistics [7,8]. AI facilitates data-driven decision-making by analyzing diverse data, including meteorological forecasts, satellite imagery, and in-field sensor data. Robotics perform repetitive tasks with rapidity, consistency, and minimal oversight. Collectively, AI and robotics catalyze a transformation from traditional agriculture to smart, autonomous farming systems [9,10,11,12]
This systematic review summarizes a decade of research on AI and robotics in agriculture, focusing on omnipresent, data-driven, autonomous smart farming systems. The PRISMA-based review examines AI-driven agricultural robotics’ evolution using over 10,000 Scopus, Web of Science (WoS), and IEEE publications. It divides the literature into robotic harvesting, precision spraying, weed detection, yield estimation, and crop health monitoring. Trends in robotic platforms, sensing modalities, AI, crop types, and geographic contributions are also mapped. It highlights field validation, explainability, energy constraints, and regional disparities as ongoing issues.
2. Materials and Methods
To ensure transparency and methodological rigor, this study follows a systematic review approach guided by the PRISMA (Preferred Reporting Items for Systematic Reviews and Meta-Analyses) framework. The literature selection process is based on a comprehensive search strategy applied to multiple academic databases, including Scopus, IEEE Xplore, Web of Science. Papers are included or excluded based on the defined criteria such as relevance to the topic, publication date, study type, and methodological quality (Table 1 and Figure 1).
The selected literature is categorized thematically according to the AI applications being explored, robotics, computer vision, autonomous navigation, decision-making frameworks, and integrated automation systems.
3. Results
A quantitative landscape analysis using the three databases helped us understand the multidisciplinary domain’s scope and trajectory. This analysis examines yearly publication growth trends, geographic distribution of research activity, keyword co-occurrence thematic clusters, AI techniques, robotic platforms, targeted crop categories, and the context in which AI-robotic systems are developed and deployed. This multifaceted investigation seeks to identify literature patterns and underexplored areas.
3.1. Publication Trends
The publication distribution from 2015 to 2025 (Figure 2) shows a notable increase in research focused on agricultural AI and robotics. Data from Scopus, WoS, and IEEE reveal a limited number of publications before 2018. Since 2019, there has been a noticeable shift in scholarly attention toward the adoption of more advanced robotic systems in agriculture. By 2024, approximately 1,200 indexed publications were recorded in Scopus, followed by 800 in WoS and 400 in IEEE. This growth across all three databases reflects a rising interdisciplinary interest in AI, robotics, and autonomous systems within the agricultural field. However, this high number of publications does not necessarily correlate with widespread field deployment, underscoring significant challenges related to validation studies and accessibility for smallholder farmers.
3.2. Geographic Distribution
The geographic distribution of publications from 2015 to 2025 (Figure 3) shows a concentrated research output in prominent countries, accompanied by notable regional disparities. India is the most prolific contributor to Scopus, with 1,412 publications, followed by China with 750 and the United States with 707. China dominates the WoS database (Figure 4b) with 754 publications, followed by the United States (604) and India (256), indicating minor coverage and indexing biases. Investment and institutional support for AI and robotics in agriculture are increasing in these rapidly developing and technologically advanced countries. The United Kingdom (GBR), Germany (DEU), and Italy (ITA) consistently contribute, with publication counts ranging from 150 to 210 in both datasets. The output of Brazil, Canada, Australia, Japan, and South Korea is inferior to that of the top three countries; however, they continue to make contributions. Sub-Saharan Africa, Southeast Asia (excluding China and India), and certain regions of South America are inadequately represented in the maps, highlighting geographic disparities within the global research ecosystem. It is important to note that IEEE Xplore does not provide geographical metadata, and thus, its geographic distribution is not represented in this analysis. These findings underscore the necessity for global collaboration and capacity enhancement to guarantee that AI-robotics-driven agriculture advantages all countries.
3.3. Keyword Co-Occurrence and Thematic Clustering
Figure 4 and Figure 5 show a comparative keyword co-occurrence analysis of Scopus and WoS indexed publications on AI and robotics in agriculture from 2015 to 2025, capturing the field’s thematic structure and temporal evolution, respectively. Both datasets show four dominant thematic clusters in Figure 4, indicating a coherent field structure: (1) Computer vision and deep Learning (blue cluster) captures “CNN,” “semantic segmentation,” and “object detection.” (2) Smart farming & IoT systems (red cluster) includes “IoT,” “blockchain,” “digital transformation,” and “smart agriculture,” reflecting AI’s growing integration with cyber-physical agricultural infrastructure. (3) Remote sensing and yield estimation (yellow cluster) includes “UAV,” “multispectral images,” “vegetation indexes,” and “reflectance,” emphasizing aerial sensing’s importance for monitoring and decision-making. (4) ML for precision agriculture/perception & Autonomy covers “support vector machines,” “forecasting,” “soil moisture,” “reinforcement learning,” and other keywords that emphasize adaptive and data-driven agricultural intelligence (green cluster). Figure 5 shows the average keyword publication year in both databases using a color gradient, with yellow representing recent topics and dark blue earlier topics. Both datasets show that foundational terms like “deep learning,” “artificial intelligence,” “agricultural robots,” and “precision agriculture” appear in cooler tones due to their early and sustained prominence in the literature. Emerging technologies like “YOLOv7/YOLOv8,” “transformers,” “object recognition,” and “smart agriculture” have received more research attention and appear in warmer tones. This trend shows that both databases are moving from foundational technologies to more specialized, real-time, and perception-based agricultural robotics applications.
Both Scopus and WoS databases agree on a thematic and temporal structure, confirming AI-driven agricultural robotics’ maturity and coherence as a multidisciplinary field. These visualizations show how AI has evolved from foundational concepts to targeted, sensor-integrated, precision-oriented applications.
3.4. AI Techniques Distribution
This section examines the diversity and prevalence of AI techniques employed in agricultural robotics research through two complementary analyses. The first analysis looks at different AI learning paradigms, such as supervised, unsupervised, and reinforcement learning, while the second analysis examines the areas where these methods are used and the types of AI/ML architecture used in major databases.
Figure 6a demonstrates that supervised learning (SL) dominated across all principal databases in agricultural robotics research from 2015 to 2025. SL has 59% of Scopus publications, surpassing hybrid/ensemble learning (5.8%), unsupervised learning (UL, 3%), reinforcement learning (RL, 1%), self-supervised learning (Self-SL, 0.9%) and semi-supervised learning (0.3%). The same trend is observed in WoS, where SL leads with 84% of the publication records, followed by hybrid/ensemble learning (10.2%), UL with 4%, RL with 1%, and Self-SL with 0.8%. Finally, IEEE also emphasizes the same trend where supervised learning with 88% of publications, significantly dominates compared to other learning paradigms. The remaining percentage in the databases corresponds to publications where the AI/ML approach was either unspecified or could not be clearly categorized.
Moreover, the circular taxonomy presented in Figure 6b analyzes agricultural AI methodologies. Deep learning (DL) significantly contributes to supervised learning (SL) and unsupervised learning (UL) applications, particularly in classification, regression, and clustering tasks. Recurrent Neural Networks (RNNs), Convolutional Neural Networks (CNNs), and Transformers (Trf) are fundamental deep learning architectures. The scheme shows that ensemble learning methods, random forests, support vector machines (SVM), and Q-learning are used in all categories, showing a growing variety of methods. However, self-supervised, hybrid, and semi-supervised learning are not used enough, showing gaps in research for AI that uses data more efficiently and can adapt better. The findings show a strong reliance on traditional methods that use labeled data, which could limit growth and adaptability, especially in fields or tasks with few labeled examples. This dependence underscores the necessity of incorporating zero-shot learning, federated learning, and explainable AI to develop more resilient, inclusive, and scalable smart agriculture solutions.
The second analysis in this section investigates the domains of application and model architecture in agricultural robotics AI. Figure 7 shows both the quantitative distribution of thematic AI branches (Figure 7a) and a taxonomical breakdown of representative models (Figure 7b). Scopus indexes 29% of publications on deep learning and neural network models (DL-NN), WoS 29.5%, and IEEE 31%. Convolutional neural networks (CNNs), transformers (Trf), long short terms memory (LSTM) networks, and their specific types (like Mask R-CNN and DeepLab) are commonly used for agricultural tasks that involve images and sensor-driven data. Computer vision (CV) ranks as the second most-cited category, comprising 19% of papers in Scopus, 24% in WoS, and 30% in IEEE, underscoring its pivotal role in workflow monitoring, detection, and automation. Classical machine learning (CI-ML), including decision trees, SVMs, and K-nearest neighbors, maintains a strong presence, particularly in Scopus (with 17% of publications), indicating continued reliance on interpretable and computationally lightweight models for precision agriculture. Other emerging categories include generative AI (e.g., GANs and diffusion models), hybrid models combining multiple learning models, and reinforcement learning (RL), which supports real-time control and adaptive decision-making. Despite their significance for sustainability and data privacy, physics-informed AI (Phy-AI, also known as physics-informed neural networks—PINNs) and federated AI (Fed-AI) models collectively have fewer than 500 publications in all databases. Natural language processing (NLP) and edge/on-device learning are currently marginal but anticipated to expand alongside voice-enabled agents and agricultural AI systems [13,14].
Figure 6b illustrates the correlation between AI model selections and algorithms across various domains, DL-NN, CV, NLP, RL, Hybrid, and Fed-AI, employing a circular taxonomy. Nevertheless, that said, advanced generative models such as GPT, Diffusion, and GANs are emerging in the field, offering opportunities to generate synthetic training data, simulate sensor inputs, and model hypothetical crop or environmental scenarios. Although still experimental, these models could help overcome data scarcity and improve model generalizability in agriculture [15]. Diversification in research may be feasible due to the low prevalence of PINNs, EdgeComp, and LangMod [16,17,18].
This analysis shows that deep learning and vision-based systems are the most common in agricultural AI research, but it also highlights important areas that are not well represented, such as energy efficiency, explainability, real-time autonomy, and situations with scarce data availability. Filling these gaps could accelerate the development of smart farming AI systems.
3.5. Robotic Platform Use
This section examines the distribution of robotic systems in agricultural applications across three key dimensions: mobility platform, functional role, and interaction/intelligence level. Figure 8a shows that aerial robots, mostly UAVs, account for 40.33% of Scopus, 62.71% of WoS, and 47.19% of IEEE publications. Ground-based robots are the second most common category, with 2.66% in Scopus, 3.37% in WoS, and 2.85% in IEEE, indicating their continued relevance for crop-level tasks like weeding, harvesting, and localized monitoring. Aquatic robots are underrepresented in Scopus, WoS, and IEEE: 0.34%, 0.46%, and 0.54%. Hybrid systems, which combine aerial and ground functions, are rare, accounting for 0.04% in WoS. These findings indicate a focus on aerial robotics while ground-based and hybrid systems are underutilized, indicating opportunities for future research and innovation in diverse agricultural contexts.
In terms of functional roles (Figure 8b), most robots are designed for monitoring. Monitoring robots dominate Scopus (37.08%), WoS (47.39%), and IEEE (37.56%), highlighting surveillance and data collection in agricultural robotics research. Spraying robots follow, with 11.29% in Scopus, 9.56% in WoS, and 8.65% in IEEE. Other roles like harvesting, seeding/planting, and post-harvest operations account for less than 10% of publications across all databases. This concentration reveals a gap in comprehensive automation solutions that span the full agricultural lifecycle.
With regard to interaction and intelligence (Figure 8c), autonomous AI-enabled robots are the most widely adopted category, accounting for 65.64% of Scopus publications, 62.64% of WoS, and 57.89% of IEEE. Semi-autonomous systems, with partial human oversight or shared control, are underrepresented in Scopus, WoS, and IEEE at 0.46%, 0.81%, and 0.89%, respectively. Similarly, collaborative and rule-based autonomous robots are also rare: 0.14% in Scopus, 0.11% in WoS, and 0.27% in IEEE. These findings show that the research field prioritizes fully autonomous AI-driven systems over collaborative or rule-based approaches. This underrepresentation highlights a potential gap in the development of robotic systems that support safe and effective human-robot collaboration, particularly in tasks requiring dexterity, adaptability, or social interaction.
In this analysis, publications that did not match any of the predefined keywords for the classification categories were labeled “uncategorized.” Case-insensitive, substring-based searches were performed on each publication’s title, abstract, and author keywords. Representative keywords defined each category, such as robotic platform type, functional role, evaluation method, or system architecture. This filtering method classifies only studies that explicitly reference technical or application-specific concepts and separates those with broader or less-specific language for clarity.
Finaly, this analysis highlights the emphasis on aerial and ground-based autonomous systems in agricultural robotics for monitoring and spraying applications. It also points out the overlooked chances for combining different types of robots, working together with humans, and expanding robot tasks in harvesting, planting, and post-harvest processing, which are important for improving automation in smart agriculture.
3.6. Crop Types Studied
The distribution of crop types targeted by AI and robotics research in agriculture reveals a notable focus around a few major horticultural crops. Maize and rice are the most frequently studied crops in all three databases, as shown in Figure 9. Maize accounts for 10.45% of crop-specific publications in Scopus, with rice following closely at 10.62%. In the same vein, maize occupies the highest position in the WoS, with 9.92%, followed by rice at 8.41%. The distribution of IEEE is slightly different, with rice (6.45%) and maize (7.52%) remaining the top two, albeit with slightly lower relative proportions than the other databases. Other significant field crops, including wheat and tomatoes, are also notable. Wheat holds the third position across all datasets, scoring 9.53% in IEEE, 8.25% in Scopus, and 6.21% in WoS. Tomato’s significance in high-value, labor-intensive production systems is evidenced by its consistent presence in the top five, with 6.78% in Scopus, 6.23% in IEEE, and 4.25% in WoS.
Pepper, cucumber, lettuce, apple, grape, banana, strawberry, and potato comprise the remaining horticultural crops, with each contributing a relatively small percentage, typically under 3% in any given database. It is important to note that pepper and apple are the only other crops that slightly exceed 1% across all sources.
This crop-specific analysis clearly emphasizes cereals and widely cultivated, data-rich crops. The widespread availability of structured datasets and the global food security priorities are consistent with the dominance of maize, rice, and wheat. The limited focus on specialty crops, fruits, and vegetables shows a lack of research, especially considering how much they could benefit from precise farming techniques, their greater variety, and the need for more labor. This difference highlights the need to expand AI and robotic solutions to include more types of crops, especially those important for small farmers and farming that can withstand climate changes.
3.7. Deployment and Implementation Contexts of AI-Robotic Systems
The chart in Figure 10a illustrates the categorization of evaluation methods. Field-tested systems represent the predominant share across all databases, with Scopus and IEEE displaying the greatest proportion. This trend indicates a growing focus on real-world validation and a drive toward elevated technology readiness levels (TRLs) for commercial implementation. Simulation-based evaluations, frequently utilizing platforms such as ROS and Gazebo [19,20], constitute a substantial share, with 14.74% in Scopus, 23.86% in WoS, 16.68% in IEEE, demonstrating their effectiveness for preliminary development. On the other hand, the prevalence of laboratory-only evaluations remains significant, indicating that a considerable portion of the research is still confined to conceptual or prototype stages with limited engagement with the uncertainties of agricultural environments. While simulations provide scalability and rapidity, their predictive efficacy is constrained without field validation, particularly in highly dynamic agricultural environments influenced by meteorological conditions, topographical variability, and biological unpredictability.
The chart in Figure 10b classifies the types of system architectures present in the examined literature. The findings indicate a significant prevalence of AI- and IoT-integrated systems throughout all databases. These systems are defined by real-time interaction among AI algorithms, cloud services, and edge sensors, facilitating agile, data-informed decision-making. Their extensive implementation signifies a transition to more interconnected and contextually aware robotics, consistent with the overarching digital agriculture framework.
Standalone robots, although still represented in a considerable percentage (particularly in IEEE with 12.39%), are observed less frequently, suggesting a diminishing dependence on isolated systems in favor of interconnected and adaptive frameworks. These rudimentary systems frequently execute repetitive tasks but are lacking environmental awareness or adaptability.
Digital twin-enabled systems, although few, are featured in Scopus with 4.83%, indicating their use as a cutting-edge technology in precision agriculture. These architectures facilitate predictive analytics and scenario simulations by sustaining real-time digital replicas of physical agricultural systems. Additionally, the limited adoption of digital twins and ongoing dependence on simulation underscore the necessity for additional investment and methodological diversification. Furthermore, accessibility continues to be an issue, although IoT-integrated systems offer more adaptability, they may be impractical for smallholders or resource-limited environments lacking sufficient connectivity infrastructure.
4. Discussion
Despite rapid advances and growing research interest in AI and robotics in agriculture, several gaps and persistent challenges prevent their widespread adoption and real-world implementation. This section presents the literature’s gaps, from limited crop diversity in datasets and overreliance on supervised learning models to underdeveloped multi-robot systems, constrained deployment in low-resource regions, and lack of field-validated evaluations. These challenges need to be addressed for AI-driven agricultural robots to move from being just test models to practical, adaptable, and widely usable tools for both advanced farms and small-scale farmers.
4.1. Quantified Research Gaps
A quantitative synthesis of the previously reviewed literature reveals several key gaps that must be addressed to enhance the maturity, equity, and real-world impact of AI-robotic systems in agriculture:
- a.
- Field validation rate: Fewer than 30% of Scopus, WoS, and IEEE studies validate results in real agricultural conditions, despite the large number of simulations and controlled lab studies [21,22,23]. This low rate of testing in real fields makes AI models less trustworthy and harder to apply in unpredictable outdoor settings, where factors like light, weather, and differences in living things can complicate how these systems see and make decisions.
- b.
- Adoption of explainable AI (XAI): Deep learning models used in agricultural robotics are becoming more complex and opaquer, but explainable AI has been rarely integrated. Less than 3% of reviewed publications (in Scopus, WoS and IEEE) mention saliency maps, SHAP, and LIME [24,25,26,27]. This lack of transparency impacts trust, regulatory compliance, and user understanding in high-stakes, safety-critical agricultural tasks.
- c.
- Coverage by region, crop, and task: The research landscape is still poorly balanced, i.e., the majority of AI-robotics publications come from India, China, and the US, leaving Sub-Saharan Africa, Southeast Asia (excluding China and India), Europe, and parts of Latin America underrepresented. The literature focuses on maize, rice, and wheat, but berries, leafy greens, and tropical fruits are neglected. Most studies focus on monitoring and spraying, while harvesting, weeding, and post-harvest sorting are understudied. This imbalance restricts AI generalizability and reinforces agricultural innovation disparities [28].
Together, these gaps point to the need for more inclusive, transparent, and field-validated AI-robotic systems that are adaptable across diverse agro-ecological zones and farming practices.
4.2. Technical Challenges
Despite significant advances in AI and robotics, technical challenges remain a barrier to the widespread adoption of AI-robotic systems in agriculture. Many AI models, particularly deep learning-based ones (which account for the vast majority of AI models used in agriculture; see Figure 6), are trained on context-specific datasets and struggle to perform consistently across geographies, crop types, lighting conditions, and seasons [29,30]. Domain adaptation and transfer learning integration are needed to scale these systems in diverse real-world settings. A related issue is robustness, especially in dynamic, unstructured agricultural environments. Foliage occlusions, irregular object geometries, sensor noise, and unpredictable weather often degrade model performance [31]. Current approaches often lack resilience to perturbations in perception, localization, and decision-making systems, which are essential for safe and reliable robotic autonomy in the field. Energy constraints also limit aerial and edge-deployed robotic systems. Modern AI models, especially vision-based deep neural networks, can quickly exceed the power budgets of embedded platforms or battery-powered drones. While cloud-based inference is scalable, it causes latency and connectivity issues in remote agricultural locations. To achieve real-time autonomy under power constraints, we need energy-efficient AI algorithms, model compression (pruning, quantization), and on-device optimization [32,33]. These technical challenges must be overcome to move laboratory research into scalable, real-world agriculture.
4.3. Ethical and Socioeconomic Barriers
AI and robotic systems promise to transform agriculture, but ethical and socioeconomic issues must be addressed to ensure equitable and inclusive technology acquisition [34,35]. Labor displacement is a major issue, especially in agricultural regions. Autonomous systems replacing manual labor in harvesting, monitoring, and spraying raise concerns about marginalizing low-skilled agricultural workers [36]. Without strategic reskilling and social safety policies, this shift may increase rural unemployment and social inequality. Another major obstacle for smallholder farmers in low- and middle-income countries is affordability [37,38]. The upfront cost, maintenance, connectivity infrastructure, and technical know-how of robotic platforms limit access to these innovations. Without deliberate subsidies or localization, agricultural AI may benefit large-scale industrial farms, reinforcing productivity and income disparities. Thirdly, the privacy and ownership of data are crucial considerations [39,40]. AI-driven agricultural systems use farm data like imagery, geolocation, soil metrics, and crop performance. Farmers often lack clarity or control over data collection, storage, and monetization. Data governance frameworks are unclear, raising concerns about consent, surveillance, and government or corporate exploitation. Transparent, farmer-centered data policies and open-source solutions can build trust and ethical AI integration [39,40].
4.4. Scalability and Infrastructure Limitations
Expanding AI and robotic technologies in various agricultural settings continues to be a significant challenge due to ongoing infrastructural and systemic constraints. In rural and remote farming areas with unreliable or unavailable internet access, connectivity is a major obstacle. Many AI-driven platforms require stable broadband or cellular networks for real-time data transfer, cloud-based analytics, or IoT sensor integration. Interoperability between systems and devices is another major issue [41,42]. The agricultural robotics ecosystem includes drones, ground vehicles, sensors, and software (ML algorithms, monitoring platforms) from various manufacturers with different communication protocols. Integration of these components into a cohesive and flexible farming system is difficult without standardized data exchange and control frameworks [43,44,45]. Retrofitting farms with AI-robotic technologies is costly and difficult. Small to medium-sized farms often use traditional equipment and infrastructure that is incompatible with modern AI solutions. The cost and complexity of upgrading or adapting these systems can delay adoption and limit scalability [46,47]. To close this gap and expand smart agriculture innovations, modular add-ons, plug-and-play AI kits, and low-cost retrofitting technologies are essential.
4.5. Research Priorities and Roadmap for Advancing AI-Robotic Agriculture
This section synthesizes a series of actionable research directions, building on the identified gaps and barriers. The objective of these priorities is to establish a connection between the current technical constraints and the future-ready, inclusive, and scalable AI-robotic agricultural systems. Table 2 summarizes these research priorities by mapping each challenge area to its associated gap and outlining corresponding opportunities for future development.
5. Conclusions
This systematic review investigated the integration of AI and robotics in agriculture for the last decade from multiple perspectives, including publication trends, geographic distribution, robotic platforms, functional roles, evaluation methods, and emerging research themes. The review showed that while there have been significant technological improvements in this field, there are still differences and gaps by using data analysis and mapping from three main databases: Scopus, WoS, and IEEE. AI-robotic innovations, especially in UAV monitoring and spraying tasks using vision-based deep learning models, have grown rapidly in the last decade, but research gaps remain. The lack of testing in real-world situations, the difficulty in understanding AI models, and the focus on only a few crops and areas make it challenging to use these technologies fairly and widely. These systems also face technical obstacles like poor generalization, energy constraints, and limited robustness when deployed in diverse agricultural environments. Economic and ethical issues like labor displacement, smallholder affordability, and data governance complicate adoption. Scalability is hampered by infrastructure issues like connectivity, interoperability, and retrofitting. However, these challenges provide a clear future innovation roadmap. Explainable AI, Generative AI such as zero-shot and federated learning, multi-agent coordination, and energy-efficient robotic design can help fill these gaps. Modern technology and inclusive, ethical, and context-sensitive deployment strategies will determine the future of AI in agriculture. Bridging these dimensions is essential for turning experimental models into resilient, real-world agricultural solutions for farmers of all sizes and regions.
Author Contributions
Conceptualization, A.H.; methodology, A.H.; software, A.H.; validation, A.H., A.A., F.Z.B. and K.J.; formal analysis, A.H.; investigation, A.H.; resources, A.H.; data curation, A.H.; writing—original draft preparation, A.H.; writing—review and editing, A.A., F.Z.B. and K.J.; visualization, A.H.; supervision, A.H.; project administration, A.H.; funding acquisition, none. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Acknowledgments
During the preparation of this manuscript, the authors used Grammarly (Version Premium, 2025) for grammar and clarity enhancement. The authors have reviewed and edited the output and take full responsibility for the content of this publication.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Bezner Kerr, R.; Naess, L.O.; Allen-O’Neil, B.; Totin, E.; Nyantakyi-Frimpong, H.; Risvoll, C.; Rivera Ferre, M.G.; López-i-Gelats, F.; Eriksen, S. Interplays between Changing Biophysical and Social Dynamics under Climate Change: Implications for Limits to Sustainable Adaptation in Food Systems. Glob. Chang. Biol. 2022, 28, 3580–3604. [Google Scholar] [CrossRef]
- Bisoffi, S.; Ahrné, L.; Aschemann-Witzel, J.; Báldi, A.; Cuhls, K.; DeClerck, F.; Duncan, J.; Hansen, H.O.; Hudson, R.L.; Kohl, J.; et al. COVID-19 and Sustainable Food Systems: What Should We Learn Before the Next Emergency. Front. Sustain. Food Syst. 2021, 5, 650987. [Google Scholar] [CrossRef]
- Alexandratos, N.; Bruinsma—FAO, J. World Agriculture towards 2030/2050: The 2012 Revision. 2012. [CrossRef]
- McKenzie, F.C.; Williams, J. Sustainable Food Production: Constraints, Challenges and Choices by 2050. Food Secur. 2015, 7, 221–233. [Google Scholar] [CrossRef]
- Mohyuddin, G.; Khan, M.A.; Haseeb, A.; Mahpara, S.; Waseem, M.; Saleh, A.M. Evaluation of Machine Learning Approaches for Precision Farming in Smart Agriculture System: A Comprehensive Review. IEEE Access 2024, 12, 60155–60184. [Google Scholar] [CrossRef]
- Warbhe, M.K.; Verma, P.; Rewatkar, R. A Review on the Use of AI and Robotics in Agricultural Practices. 2nd Int. Conf. Intell. Cyber Phys. Syst. Internet Things, ICoICI 2024—Proc. 2024, 1444–1450. [CrossRef]
- Krishnan, A.; Swarna, S.; Balasubramanya, H.S. Robotics, IoT, and AI in the Automation of Agricultural Industry: A Review. Proc. B-HTC 2020—1st IEEE Bangalore Humanit. Technol. Conf. 2020. [CrossRef]
- Pal, D.; Joshi, S. AI, IoT and Robotics in Smart Farming: Current Applications and Future Potentials. 2nd Int. Conf. Sustain. Comput. Data Commun. Syst. ICSCDS 2023—Proc. 2023, 1096–1101. [CrossRef]
- Adamo, G.; Willis, M. The Omnipresent Role of Technology in Social-Ecological Systems: Ontological Discussion and Updated Integrated Framework. Lect. Notes Bus. Inf. Process. 2023, 476 LNBIP, 87–102. [Google Scholar] [CrossRef]
- Mohandoss, K. The Omnipotent and Omnipresent Inevitability of Artificial Intelligence (AI) AI Is All about Creating a Win-Win Situation. Artif. Intell. Pharm. Sci. 2023, 1–17. [CrossRef]
- Javaid, M.; Haleem, A.; Khan, I.H.; Suman, R. Understanding the Potential Applications of Artificial Intelligence in Agriculture Sector. Adv. Agrochem 2023, 2, 15–30. [Google Scholar] [CrossRef]
- Delfani, P.; Thuraga, V.; Banerjee, B.; Chawade, A. Integrative Approaches in Modern Agriculture: IoT, ML and AI for Disease Forecasting amidst Climate Change. Precis. Agric. 2024, 25, 2589–2613. [Google Scholar] [CrossRef]
- Jura, J.; Trnka, P.; Cejnek, M. Using NLP to Analyze Requirements for Agriculture 4.0 Applications. 2022 23rd Int. Carpathian Control Conf. ICCC 2022 2022, 239–243. [CrossRef]
- Rezayi, S.; Liu, Z.; Wu, Z.; Dhakal, C.; Ge, B.; Dai, H.; Mai, G.; Liu, N.; Zhen, C.; Liu, T.; et al. Exploring New Frontiers in Agricultural NLP: Investigating the Potential of Large Language Models for Food Applications. IEEE Trans. Big Data 2024, 11, 1235–1246. [Google Scholar] [CrossRef]
- Lu, Y.; Chen, D.; Olaniyi, E.; Huang, Y. Generative Adversarial Networks (GANs) for Image Augmentation in Agriculture: A Systematic Review. Comput. Electron. Agric. 2022, 200, 107208. [Google Scholar] [CrossRef]
- Shi, H.; Li, Q. Edge Computing and the Internet of Things on Agricultural Green Productivity. J. Supercomput. 2022, 78, 14448–14470. [Google Scholar] [CrossRef]
- Kalyani, Y.; Collier, R. A Systematic Survey on the Role of Cloud, Fog, and Edge Computing Combination in Smart Agriculture. Sensors 2021, 21, 5922. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Cao, Z.; Dong, W. Overview of Edge Computing in the Agricultural Internet of Things: Key Technologies, Applications, Challenges. IEEE Access 2020, 8, 141748–141761. [Google Scholar] [CrossRef]
- Quigley, M.; Gerkey, B.; Conley, K.; Faust, J.; Foote, T.; Leibs, J.; Berger, E.; Wheeler, R.; Ng, A. ROS: An Open-Source Robot Operating System. lars.mec.ua.ptM Quigley, K Conley, B Gerkey, J Faust, T Foote, J Leibs, R Wheel. AY NgICRA Work. open source software, 2009•lars.mec.ua.pt.
- Koenig, N.; Howard, A. Design and Use Paradigms for Gazebo, an Open-Source Multi-Robot Simulator. 2004 IEEE/RSJ Int. Conf. Intell. Robot. Syst. 2004, 3, 2149–2154. [Google Scholar] [CrossRef]
- Hu, J.; Pang, T.; Peng, B.; Shi, Y.; Li, T. A Small Object Detection Model for Drone Images Based on Multi-Attention Fusion Network. Image Vis. Comput. 2025, 155, 105436. [Google Scholar] [CrossRef]
- Fu, G.; Li, C.; Liu, W.; Pan, K.; He, J.; Li, W. Maize Yield Estimation Based on UAV Multispectral Monitoring of Canopy LAI and WOFOST Data Assimilation. Eur. J. Agron. 2025, 168, 127614. [Google Scholar] [CrossRef]
- Jeon, D.; Jung, H.J.; Lee, K.D.; Han, J.G.; Park, C.; Han, S.; Kim, H. A Study of Spray Volume Prediction Techniques for Variable Rate Pesticide Application Using Unmanned Aerial Vehicles. J. Biosyst. Eng. 2025, 50, 21–32. [Google Scholar] [CrossRef]
- Dong, X.; Pan, J. DHS-YOLO: Enhanced Detection of Slender Wheat Seedlings Under Dynamic Illumination Conditions. Agriculture 2025, 15, 510. [Google Scholar] [CrossRef]
- Upadhyay, A.; C, S.G.; Mahecha, M.V.; Mettler, J.; Howatt, K.; Aderholdt, W.; Ostlie, M.; Sun, X. Weed-Crop Dataset in Precision Agriculture: Resource for AI-Based Robotic Weed Control Systems. Data Br. 2025, 60, 111486. [Google Scholar] [CrossRef]
- Aijaz, N.; Lan, H.; Raza, T.; Yaqub, M.; Iqbal, R.; Pathan, M.S. Artificial Intelligence in Agriculture: Advancing Crop Productivity and Sustainability. J. Agric. Food Res. 2025, 20, 101762. [Google Scholar] [CrossRef]
- Singha, C.; Sahoo, S.; Tinh, N.D.; Ditthakit, P.; Lu, Q.O.; El-Magd, S.A.; Swain, K.C. Climate-Resilient Strategies for Sustainable Groundwater Management in Mahanadi River Basin of Eastern India. Acta Geophys. 2024, 73, 1891–1926. [Google Scholar] [CrossRef]
- Wang, D.; Zhao, M.; Li, Z.; Xu, S.; Wu, X.; Ma, X.; Liu, X. A Survey of Unmanned Aerial Vehicles and Deep Learning in Precision Agriculture. Eur. J. Agron. 2025, 164, 127477. [Google Scholar] [CrossRef]
- Bala, A.; Muqaibel, A.H.; Iqbal, N.; Masood, M.; Oliva, D.; Abdullahi, M. Machine Learning for Drone Detection from Images: A Review of Techniques and Challenges. Neurocomputing 2025, 635, 129823. [Google Scholar] [CrossRef]
- Yang, Z.; Hu, K.; Kou, W.; Xu, W.; Wang, H.; Lu, N. Enhanced Recognition and Counting of High-Coverage Amorphophallus Konjac by Integrating UAV RGB Imagery and Deep Learning. Sci. Rep. 2025, 15, 1–14. [Google Scholar] [CrossRef]
- Woon Choi, D.; Hyeon Park, J.; Yoo, J.H.; Ko, K.E. AI-Driven Adaptive Grasping and Precise Detaching Robot for Efficient Citrus Harvesting. Comput. Electron. Agric. 2025, 232, 110131. [Google Scholar] [CrossRef]
- Mohanty, T.; Pattanaik, P.; Dash, S.; Tripathy, H.P.; Holderbaum, W. Smart Robotic System Guided with YOLOv5 Based Machine Learning Framework for Efficient Herbicide Usage in Rice (Oryza Sativa L.) under Precision Agriculture. Comput. Electron. Agric. 2025, 231, 110032. [Google Scholar] [CrossRef]
- Young, S.N. Editorial: Intelligent Robots for Agriculture -- Ag-Robot Development, Navigation, and Information Perception. Front. Robot. AI 2025, 12, 1597912. [Google Scholar] [CrossRef]
- Khaleelee, O. AI and Social Cohesion: Threat to Mankind? Organ. Soc. Dyn. 2024, 24, 201–215. [Google Scholar] [CrossRef]
- Mana, A.A.; Allouhi, A.; Hamrani, A.; Rahman, S.; el Jamaoui, I.; Jayachandran, K. Sustainable AI-Based Production Agriculture: Exploring AI Applications and Implications in Agricultural Practices. Smart Agric. Technol. 2024, 7, 100416. [Google Scholar] [CrossRef]
- Jadon, J.K.S.; Singh, R. Challenges and Opportunities of Internet of Things in Smart Agriculture: A Review. Lect. Notes Electr. Eng. 2022, 860, 653–662. [Google Scholar] [CrossRef]
- Allouhi, A.; Choab, N.; Hamrani, A.; Saadeddine, S. Machine Learning Algorithms to Assess the Thermal Behavior of a Moroccan Agriculture Greenhouse. Clean. Eng. Technol. 2021, 5, 100346. [Google Scholar] [CrossRef]
- Ngulube, P. Leveraging Information and Communication Technologies for Sustainable Agriculture and Environmental Protection among Smallholder Farmers in Tropical Africa. Discov. Environ. 2025, 3, 1–17. [Google Scholar] [CrossRef]
- Wilgenbusch, J.C.; Pardey, P.G.; Hospodarsky, N.; Lynch, B.J. Addressing New Data Privacy Realities Affecting Agricultural Research and Development: A Tiered-Risk, Standards-Based Approach. Agron. J. 2022, 114, 2653–2668. [Google Scholar] [CrossRef]
- Senay, S.D.; Shurson, G.C.; Cardona, C.; Silverstein, K.A.T. Big Data, Data Privacy, and Plant and Animal Disease Research Using GEMS. Agron. J. 2022, 114, 2644–2652. [Google Scholar] [CrossRef]
- Choruma, D.J.; Dirwai, T.L.; Mutenje, M.J.; Mustafa, M.; Chimonyo, V.G.P.; Jacobs-Mata, I.; Mabhaudhi, T. Digitalisation in Agriculture: A Scoping Review of Technologies in Practice, Challenges, and Opportunities for Smallholder Farmers in Sub-Saharan Africa. J. Agric. Food Res. 2024, 18, 101286. [Google Scholar] [CrossRef]
- Aborujilah, A.; Alashbi, A.; Shayea, I.; Mohamed, A.H.; Alhammadi, A.; El-Saleh, A.A.; Ahad, A. IoT Integration in Agriculture: Advantages, Challenges, and Future Perspectives: Short Survey. Proc.—10th Int. Conf. Wirel. Networks Mob. Commun. WINCOM 2023 2023. [CrossRef]
- Roussaki, I.; Doolin, K.; Skarmeta, A.; Routis, G.; Lopez-Morales, J.A.; Claffey, E.; Mora, M.; Martinez, J.A. Building an Interoperable Space for Smart Agriculture. Digit. Commun. Networks 2023, 9, 183–193. [Google Scholar] [CrossRef]
- Rose, D.C.; Lyon, J.; de Boon, A.; Hanheide, M.; Pearson, S. Responsible Development of Autonomous Robotics in Agriculture. Nat. Food 2021, 2, 306–309. [Google Scholar] [CrossRef]
- Lokhorst, K. AgROBOfood Final Report. Zenodo 2024. [Google Scholar] [CrossRef]
- Gil, G.; Casagrande, D.E.; Cortés, L.P.; Verschae, R. Why the Low Adoption of Robotics in the Farms? Challenges for the Establishment of Commercial Agricultural Robots. Smart Agric. Technol. 2023, 3, 100069. [Google Scholar] [CrossRef]
- Ohashi, T.; Saijo, M.; Suzuki, K.; Arafuka, S. From Conservatism to Innovation: The Sequential and Iterative Process of Smart Livestock Technology Adoption in Japanese Small-Farm Systems. Technol. Forecast. Soc. Change 2024, 208, 123692. [Google Scholar] [CrossRef]
Figure 1.
PRISMA-based flowchart of the literature selection process across Scopus, WoS, and IEEE databases.
Figure 1.
PRISMA-based flowchart of the literature selection process across Scopus, WoS, and IEEE databases.
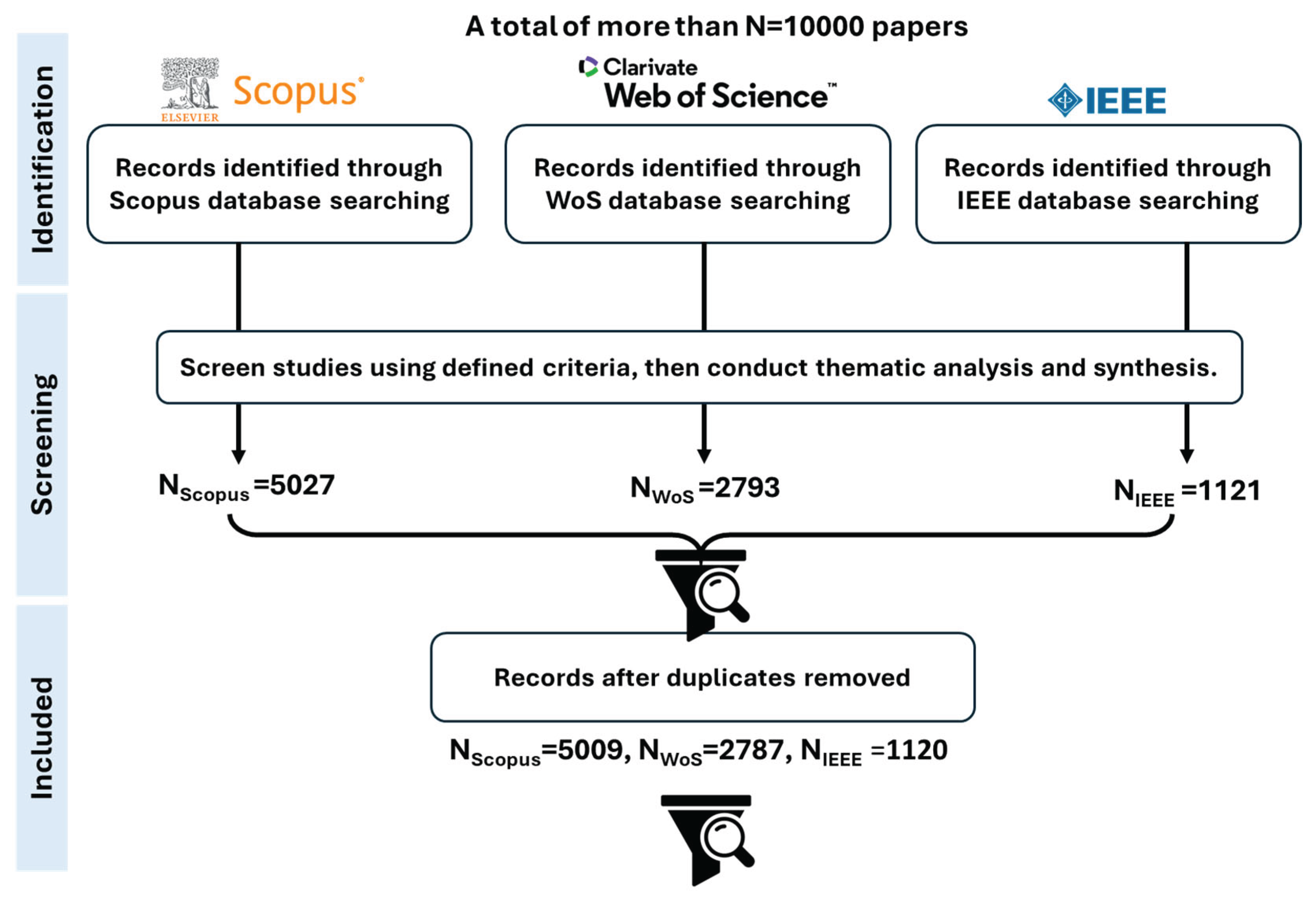
Figure 2.
Annual publication distribution from 2015 to 2025 across Scopus, WoS, and IEEE.
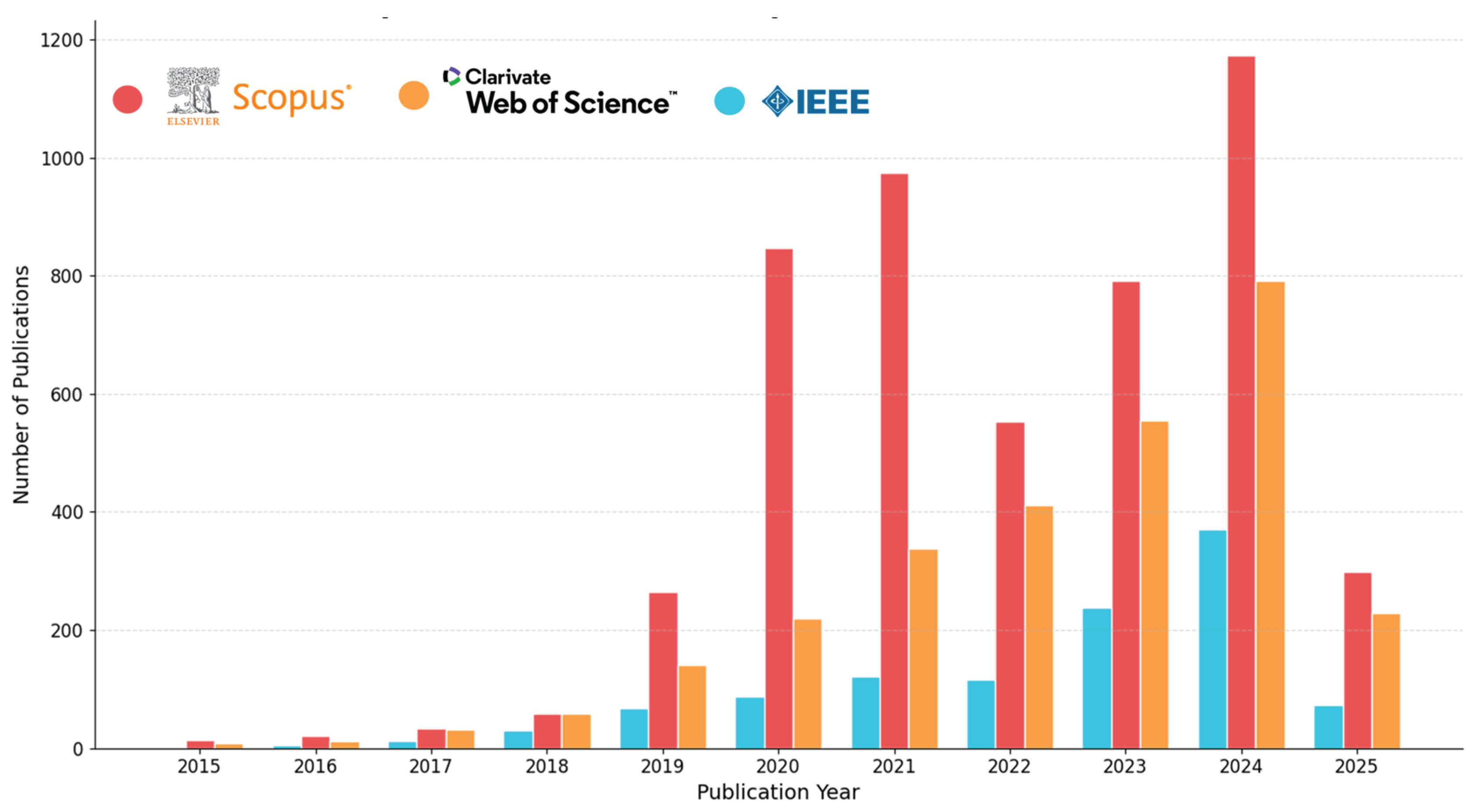
Figure 3.
Geographic distribution of publications on AI and robotics in agriculture (2015-2025) across Scopus and WoS.
Figure 3.
Geographic distribution of publications on AI and robotics in agriculture (2015-2025) across Scopus and WoS.
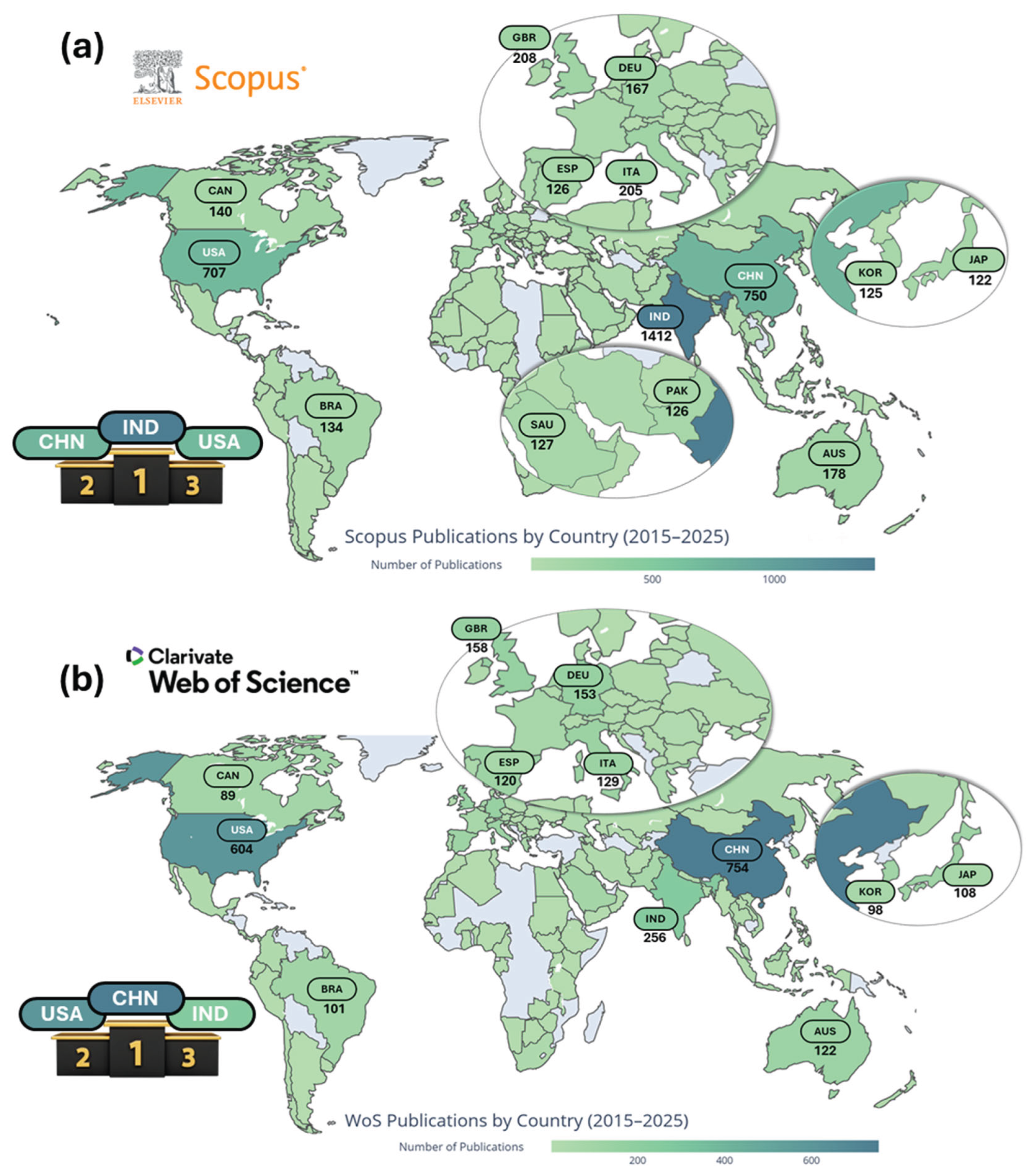
Figure 4.
Thematic clustering of research in AI and robotics in agriculture based on keyword co-occurrence analysis from (a) Scopus and (b) WoS databases.
Figure 4.
Thematic clustering of research in AI and robotics in agriculture based on keyword co-occurrence analysis from (a) Scopus and (b) WoS databases.
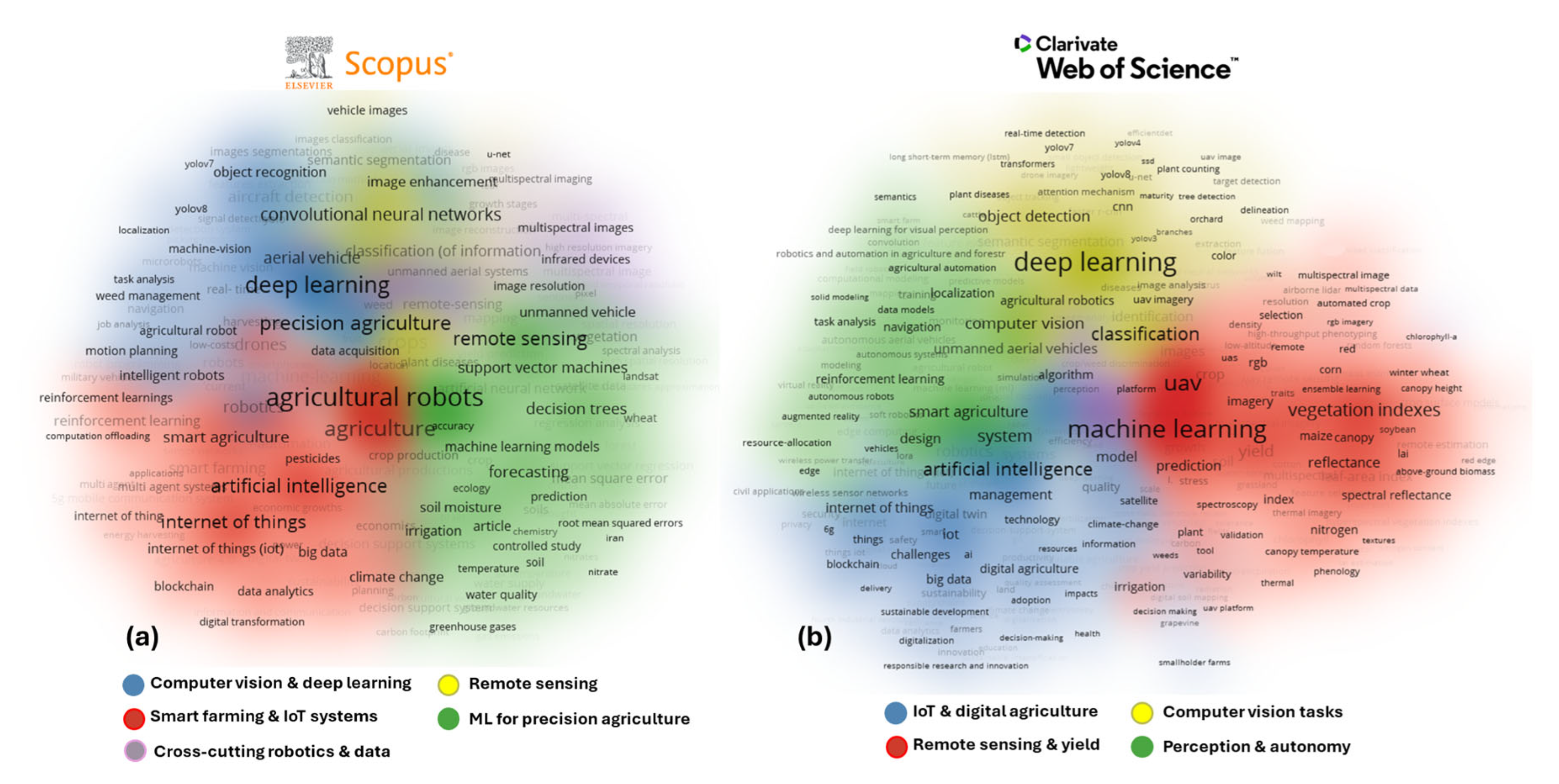
Figure 5.
Temporal evolution of research topics in AI and robotics in agriculture based on keyword co-occurrence analysis from (a) Scopus and (b) WoS databases.
Figure 5.
Temporal evolution of research topics in AI and robotics in agriculture based on keyword co-occurrence analysis from (a) Scopus and (b) WoS databases.
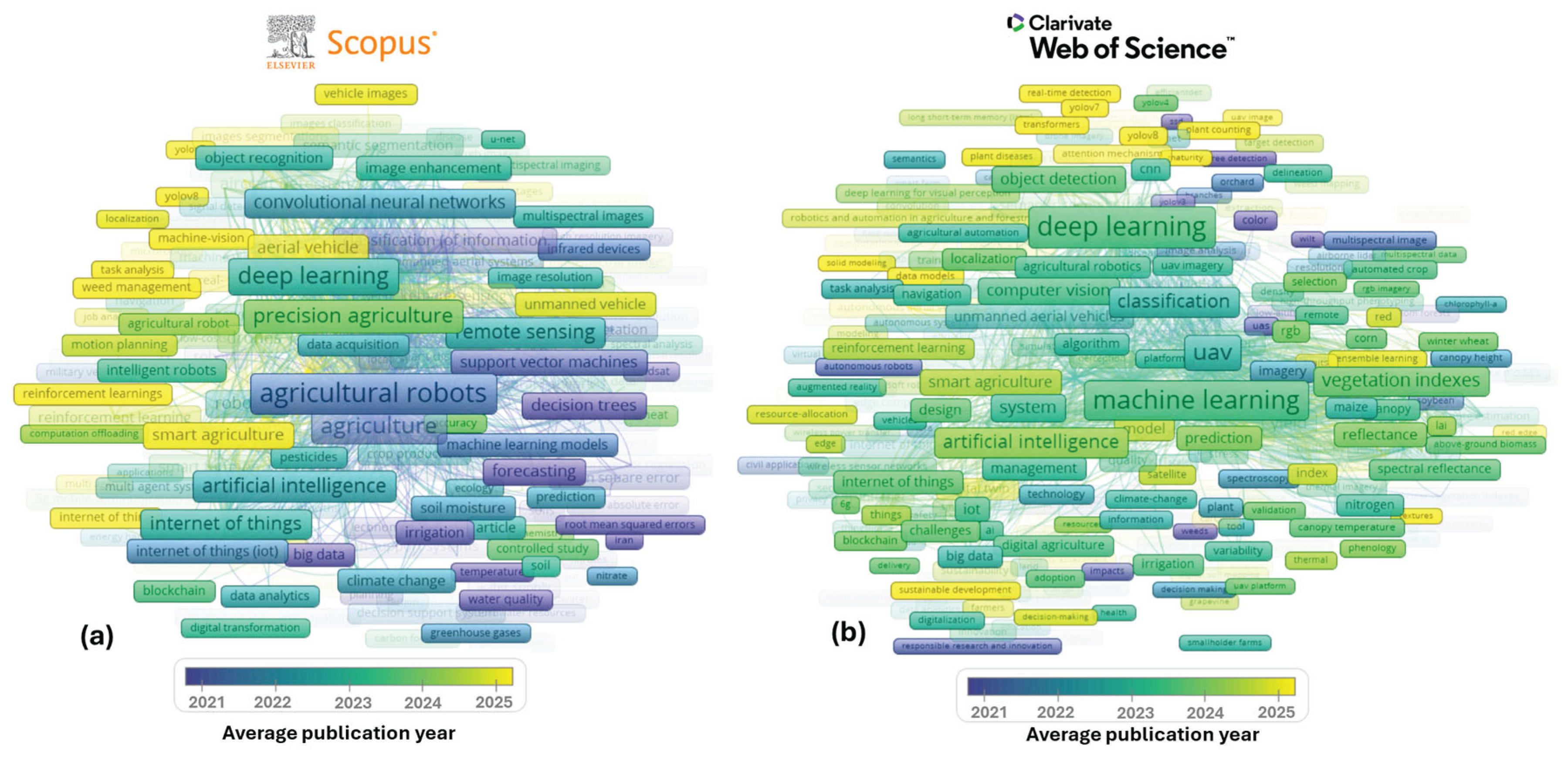
Figure 6.
(a) Distribution and (b) taxonomy of AI techniques used in agricultural robotics research (2015–2025) across Scopus, WoS, and IEEE.
Figure 6.
(a) Distribution and (b) taxonomy of AI techniques used in agricultural robotics research (2015–2025) across Scopus, WoS, and IEEE.
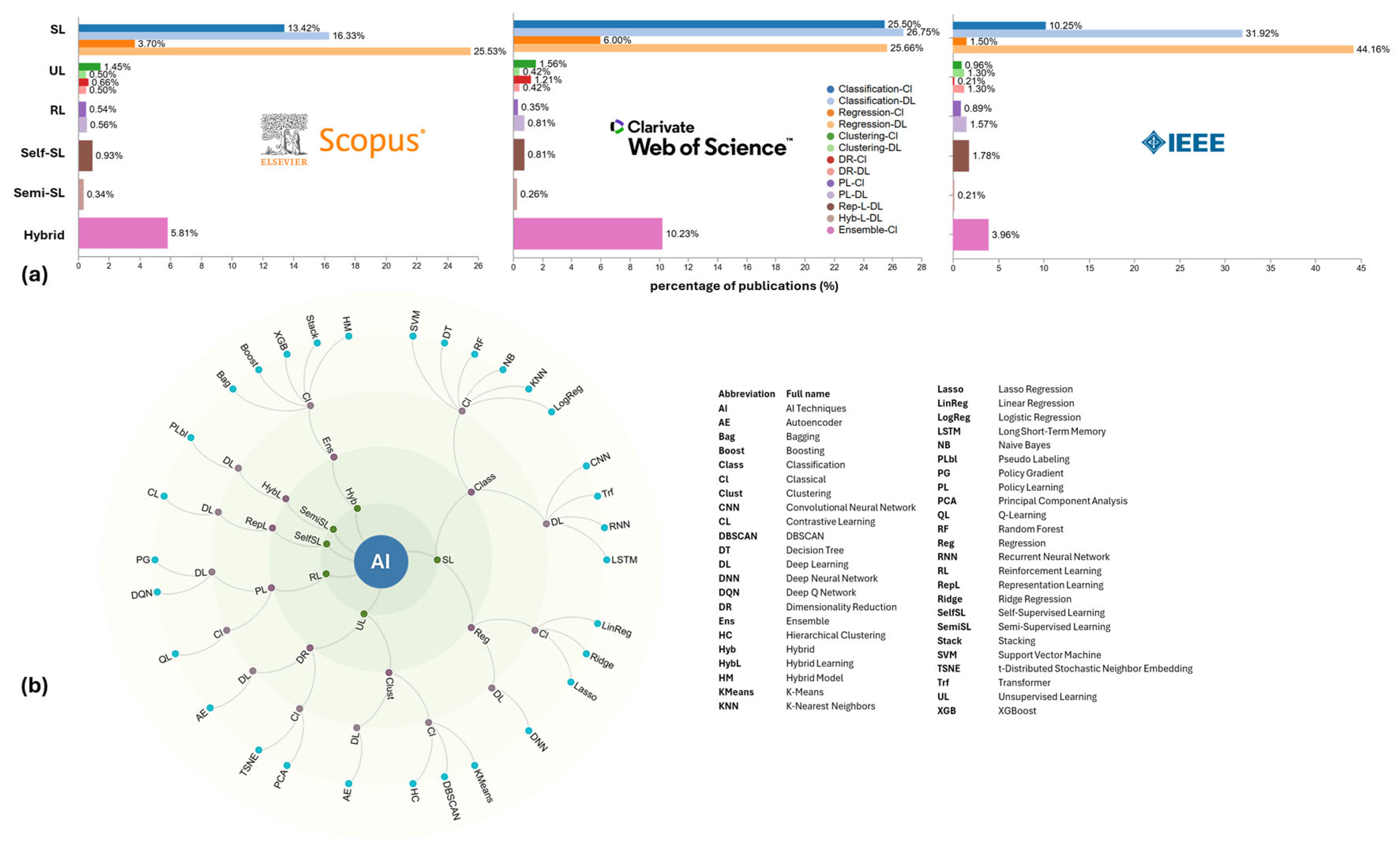
Figure 7.
Distribution of (a) AI application domains and (b) model architectures in agricultural robotics research (2015–2025) across Scopus, WoS, and IEEE.
Figure 7.
Distribution of (a) AI application domains and (b) model architectures in agricultural robotics research (2015–2025) across Scopus, WoS, and IEEE.
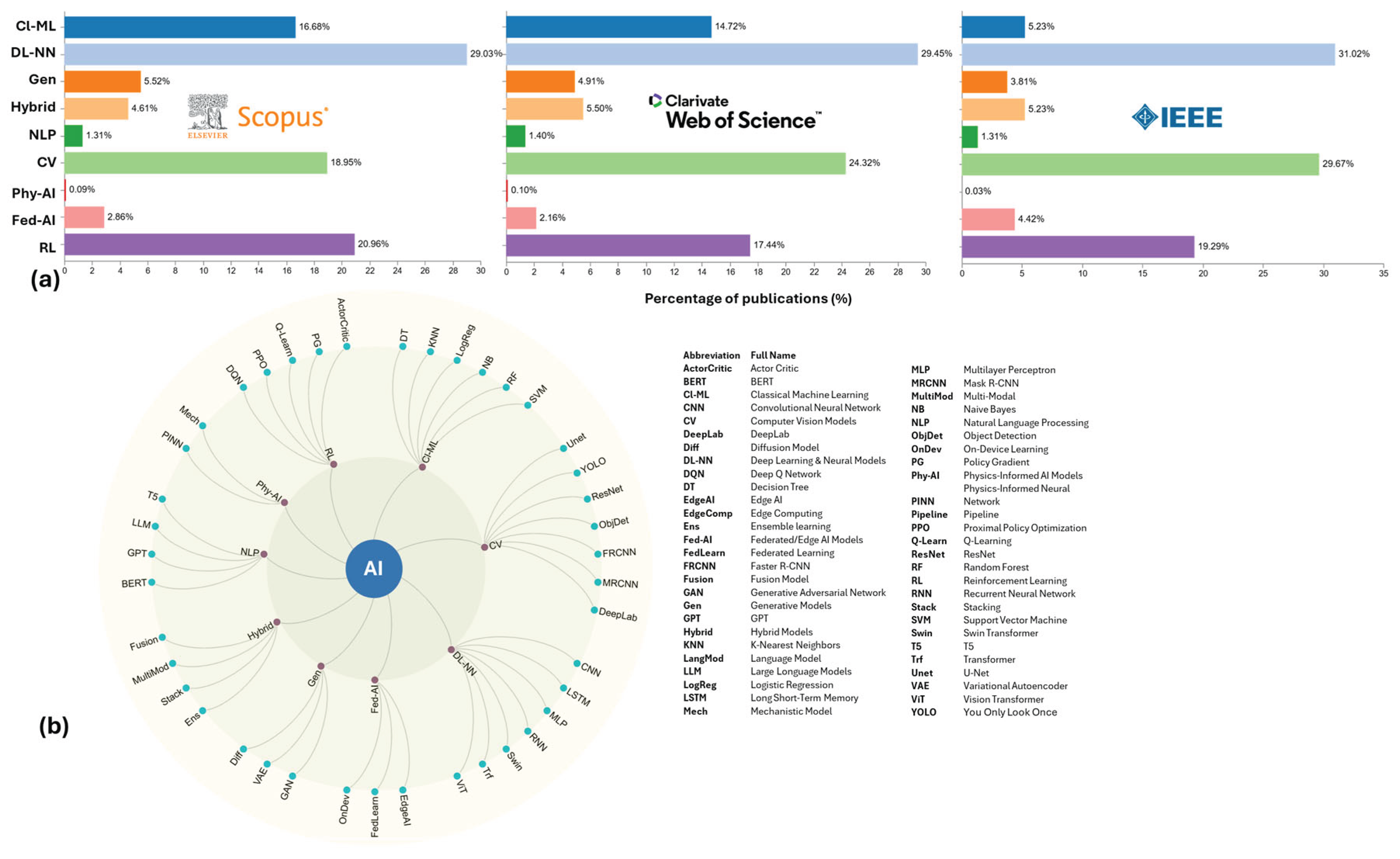
Figure 8.
Distribution of agricultural robotic systems by (a) mobility platform, (b) functional role, and (c) interaction type (2015–2025) across Scopus, WoS, and IEEE.
Figure 8.
Distribution of agricultural robotic systems by (a) mobility platform, (b) functional role, and (c) interaction type (2015–2025) across Scopus, WoS, and IEEE.
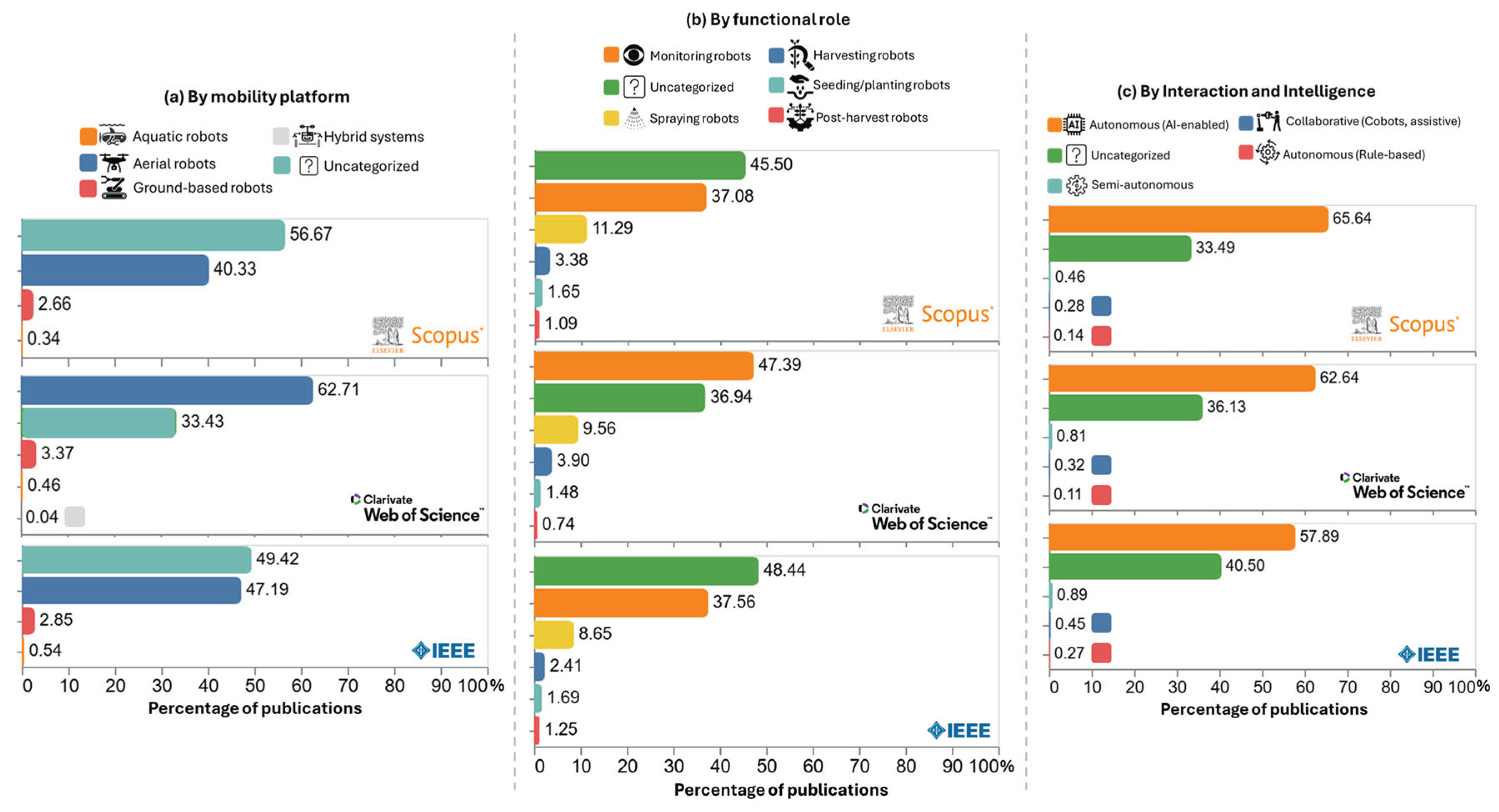
Figure 9.
Distribution of crop types studied in AI and robotics research across (a) Scopus, (b) WoS, and (c) IEEE (2015–2025).
Figure 9.
Distribution of crop types studied in AI and robotics research across (a) Scopus, (b) WoS, and (c) IEEE (2015–2025).
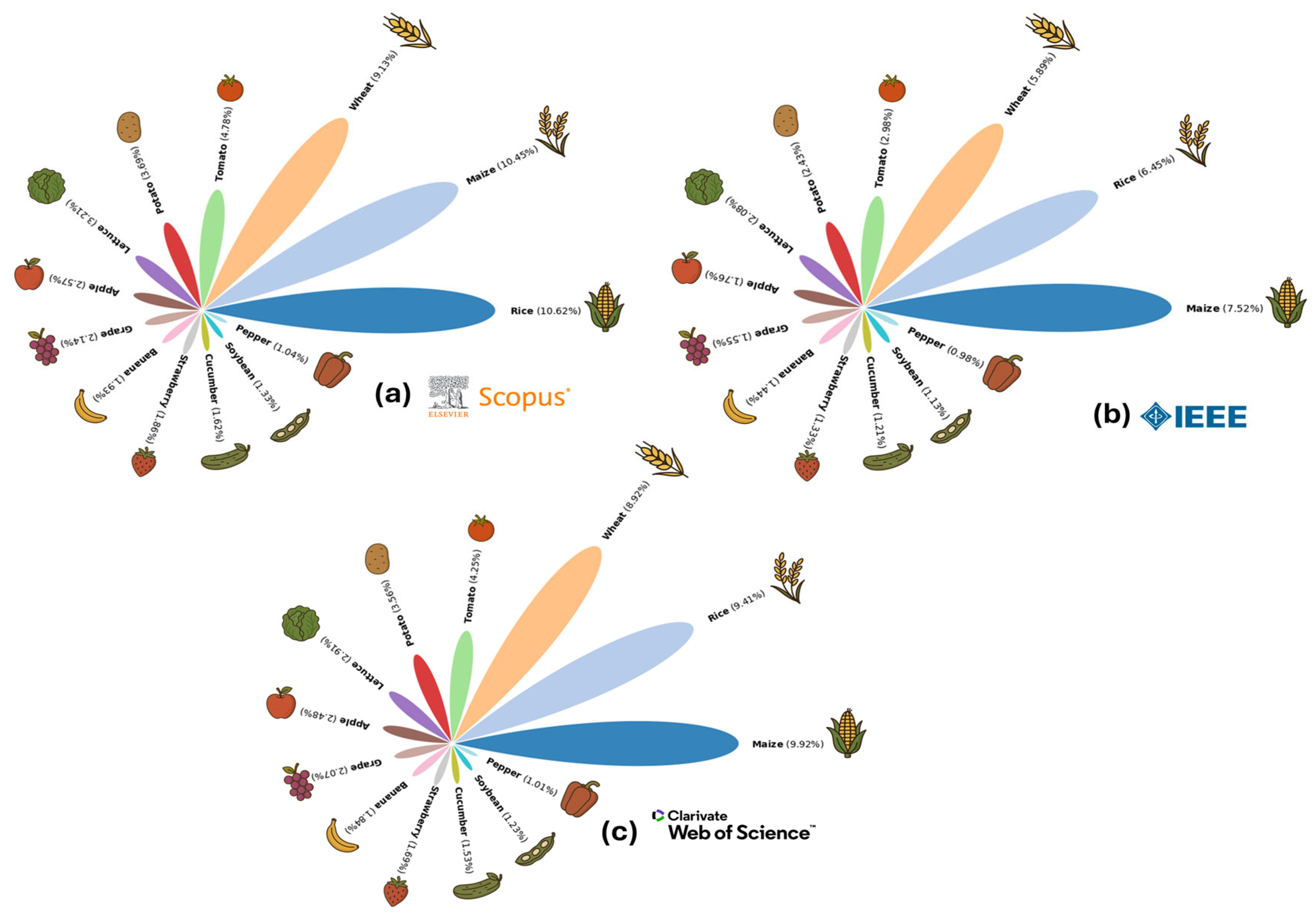
Figure 10.
Distribution of AI-robotic systems by (a) evaluation type and (b) system architecture across Scopus, WoS, and IEEE (2015–2025).
Figure 10.
Distribution of AI-robotic systems by (a) evaluation type and (b) system architecture across Scopus, WoS, and IEEE (2015–2025).
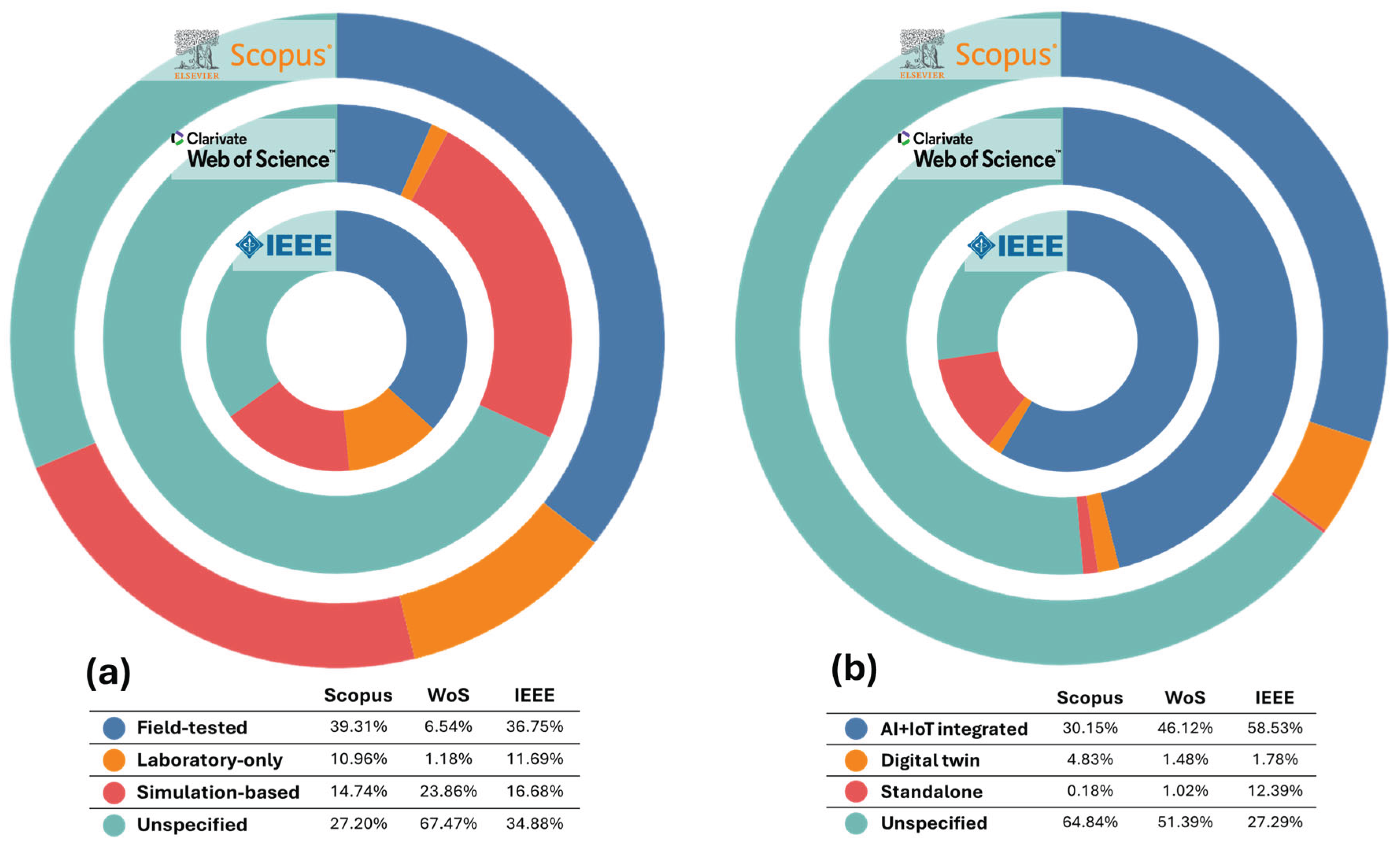

Table 1.
Systematic review protocol and methodological steps.
| Step | Description and key elements |
|---|---|
| Research questions | To guide the systematic review, we established key research questions focused on the intersection of AI and robotics in agriculture: ▪ How do AI and robotic technologies support the transition toward fully automated farms? ▪ What are the dominant trends and innovations shaping this domain? ▪ Which technical, economic, and ethical challenges currently hinder large-scale deployment? ▪ What are the gaps in the literature that future studies should address? |
| Identification of keywords | We developed a comprehensive Boolean query to encapsulate the scope of the review: (“artificial intelligence” OR “AI” “machine learning” OR “deep learning” OR “zero-shot learning” OR “self-supervised learning” OR “reinforcement learning”) AND (“agriculture” OR “smart farming” OR “autonomous farm” OR “precision agriculture”) AND (“robotics” OR “agricultural robots” OR “swarm robotics” OR “UAV” OR “drone” OR “cobot” OR “multi-agent systems” OR “digital twin”) |
| Selection of resources | The literature search was conducted across leading academic databases relevant to AI, engineering, and agricultural science: ▪ WoS (https://www.webofscience.com) ▪ Scopus (https://www.scopus.com) ▪ IEEE Xplore (https://ieeexplore.ieee.org) |
| Timeframe | The review includes peer-reviewed publications from 2015 to 2025, reflecting recent advances in smart agriculture and AI-enabled robotics. |
| Inclusion and exclusion criteria |
Inclusion criteria: ▪ Articles focused on AI or robotics applied to agricultural tasks. ▪ Studies addressing autonomous systems, smart farming, or agricultural decision support systems. ▪ Publications within the defined timeframe and written in English. Exclusion criteria: ▪ Studies not directly addressing AI or robotics in agriculture. ▪ Non-peer-reviewed sources or grey literature. ▪ Papers in non-English languages or lacking methodological rigor. |
| Article selection and screening | The search results were imported into Mendeley for deduplication. Final articles were selected based on full-text availability and relevance to the inclusion criteria. |
| Thematic analysis and synthesis | The included articles were categorized into thematic clusters such as robotic harvesting, precision irrigation, swarm robotics, and digital twins. Data extraction was conducted using a structured matrix to analyze methods, technologies, outcomes, and challenges. |
Table 2.
Challenges, gaps, and future directions in AI-robotic agriculture.
| Challenge area | Key gaps or barriers | Future research opportunities |
|---|---|---|
| Field validation & robustness | Low real-field deployment rate; model fragility to outdoor conditions | Field-validated pipelines; domain adaptation; multimodal sensor fusion |
| Transparency & trust | Minimal XAI use; lack of interpretability | Saliency maps, LIME/SHAP integration; regulatory-aligned AI auditing tools |
| Regional & task imbalance | Underrepresented regions, crops, and tasks | Regional datasets; multi-crop training; task-diverse benchmarking frameworks |
| Energy & real-time constraints | AI too heavy for drones or embedded systems | Lightweight GAI model design; pruning/quantization; neuromorphic or analog AI |
| Social impact & equity | Labor replacement fears; high system cost; unclear data ownership | Fair-tech design; AI subsidy programs; open-source/localized AI; data governance |
| Scalability & infrastructure | Poor connectivity; lack of standards; hard to retrofit | Interoperable AI ecosystems; plug-and-play modules; federated learning frameworks |
| Limited coordination & autonomy | Few multi-agent or swarm systems | Swarm robotics; multi-agent reinforcement learning; cooperative planning algorithms |
| Climate-smart adaptation | Lack of focus on sustainable, regenerative practices | AI for carbon farming, biodiversity, water use optimization |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



