Submitted:
13 April 2025
Posted:
14 April 2025
You are already at the latest version
Abstract
Vehicle-to-Everything (V2X) communication is an emerging paradigm that facilitates real-time data exchange between vehicles, infrastructure, pedestrians, and networks using wireless communication technologies. As traffic congestion, collision rates, and mobility demands increase, V2X offers promising solutions to improve road safety, optimize transportation systems, and enable autonomous vehicle operations. This paper presents a comprehensive survey of V2X communication modes—V2V, V2I, V2N, and V2P—while highlighting their architectures, applications, and operational challenges. Furthermore, mathematical models are developed to evaluate key performance indicators such as latency, packet delivery ratio (PDR), and throughput under varying traffic and deployment conditions. Simulation results demonstrate the critical role of relay nodes, RSU density, and packet size in determining V2X network performance. Concluding discussions emphasize the importance of reliable V2X deployment and suggest directions for integrating intelligent routing and adaptive communication to meet the needs of future smart transportation systems.
Keywords:
Connected vehicles
; V2V
; 5G communications
; V2X
; Latency and Throughput Modeling
1. Introduction:
Vehicle to Vehicle (V2V) communication is a technique that is used to exchange information between vehicles on the road, in order to avoid accidents, efficient traffics, deal with emergency cases, and other enhancements of services that to be used on the road [1].
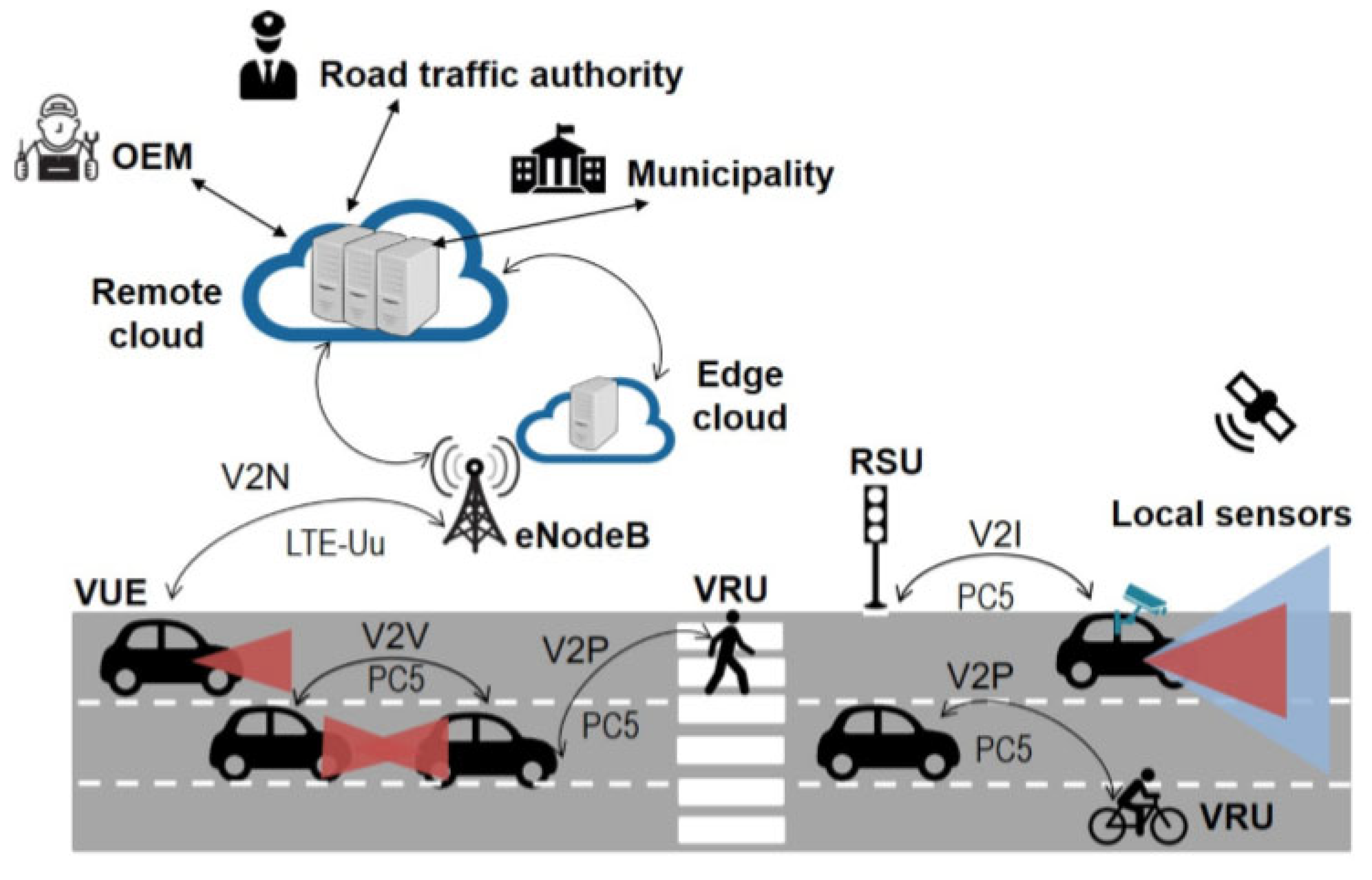
On the other side, vehicles need to communicate to infrastructures and all stationary points on the road to improve travel demands and planning decisions, this what is called a Vehicle to everything communication, and it is abbreviated as (V2X) [2]. Many projects and researches were published about V2V and V2X communications, these papers discussed how to apply this technology to develop different services and applications that are related to the road. Transportation system (for example) is a very important thing for our daily life, and enhancing these system means enhancing our life. This can be done through developing vehicles` technologies to communicate with each other, as well as, to communicate with everything, and thus traffic flow can be regulated, and hence congestions and car`s accidents can be avoided, power and time can be saved due to finding an optimal road that reduces power and time, and finally life can be saved also. Fig. 1 shows the infrastructure and modes of V2X network.
Nowadays with the developing of 5G communication techniques, researchers go towards applying this technique on the V2X networks, because of the high speed and the more bandwidth that provided by this new generation of communication technique [3]. The researchers also started to study the possibility of self-driving or auto-driving vehicles to achieve autonomous, and indeed some samples of these cars were introduced actually, and the best example of auto-driving cars, are Tesla cars. The developers dream to achieve the fully automatic driving cars (while the driver do some shopping on the internet, watching a TV show, checking his email, etc., also containing self-parking by the car itself) in the near few years.
The objectives of this paper are:
- To explain the core principles and communication modes of V2X systems, including V2V, V2I, V2N, and V2P, and their applications in transportation networks.
- To analyze the architectural frameworks supporting V2X, with a focus on 5G, PC5 interface, and LTE-Uu protocols.
- To evaluate the benefits and limitations of V2X in enhancing road safety, minimizing collisions, and enabling efficient traffic flow.
- To develop and apply mathematical models that quantify key V2X performance metrics, such as latency, packet delivery ratio, and throughput.
- To conduct simulation-based performance analysis for various deployment scenarios, including traffic density variations and RSU placement.
Figure 1.
V2X infrastructure and modes[3].
Figure 1.
V2X infrastructure and modes[3].
2. Why V2X (Benefits)?
If we talk about crash avoidance system as an example of V2X benefits, V2X technology is expected to be growing over today’s crash avoidance technologies such as forward collision warning, blind spot warning, and automatic emergency braking systems. V2X technology would be integrated with other technologies that depended on various sensors such as cameras or radar to improve the effectiveness of these safety systems furthermore, so the potential crash situations can be detected as soon as possible with more reliably. V2X has a possibility to allow for enhanced 360 degree situational awareness, and this allows vehicles to “see” around corners, and it can help the driver to detect and avoid many crashing scenarios that are difficult to be detected by other types of sensors like, for an example, intersection related crashes, That is considered as one of the most deadly crash types [4].
Some of the V2X technology benefits that are used in traffic enhancing system to make it more safety, are listed below:
- Warn if there is sudden braking in the vehicles ahead.
- Help drivers avoid collisions at intersections by alerting drivers if another vehicle approaching the intersection may run the red light. If you are the driver who might run a red light, V2X will send you an alert of a potential collision with cross traffic. Warn drivers of another vehicle in their blind spot.
- Inform drivers of bad road weather conditions, warning drivers of unsafe road conditions experienced by others ahead, enabling the driver to slow down or change routes altogether.
- V2X also has the potential to help enable warnings about pedestrians in crosswalks n crosswalks or work zones ahead.
3. Modes of Operation of V2X:
As mentioned above, V2X allows the vehicle to communicate with everything on the road, and in general there are mainly four modes of operation that this technology can be operate in them. These modes are Vehicle-to-Vehicle Communication (V2V), Vehicle-to-Pedestrian (V2P), Vehicle-to-Network (V2N), and Vehicle-to-Infrastructure (V2I) [5]. To increase safety, and make the exchanging of the information more smoothly and trusted, these four modes can be used simultaneously, and the information can be transformed from nearby sensors and hence accidents can be prevented. These four modes are:
- Vehicle-to-Vehicle (V2V): In this mode, vehicles will be allowed to exchange data between them directly, and a mesh network typically is formed, which helps to make better decisions through information exchange among the existing nodes. To do this, an authorization must firstly be obtained from the network operator. V2V application information involves location of the vehicle, vehicle attributes, traffic dynamics, etc., and the applications work by transmitting messages carrying these information. A prerequisite to create a V2V communication, is transforming data from one to many with minimum latency, this is done by keeping the message payloads flexible for better communication, and also by broadcasting Third Generation Partnership Project (3GPP) messages [6].
- Vehicle-to-Pedestrian (V2P): In this mode the data will be exchanged between vehicles and other road users those are not using vehicles(also known as Vulnerable Road Users (VRUs)), like bicyclists, pedestrians, etc. Information messages, warning messages, and alerts can be transmitted and received between the drivers and pedestrians by using User Equipment (UEs) that are provided for each of them [7]. The communication between vehicles and VRUs can be existed even when they are in Non-Line of Sight, and also under low visibility cases such as dark night, heavy rain, foggy weather, etc. The sensitivity of pedestrian UEs is lower than vehicular UEs because of the antenna and battery capacity difference. So V2P application supported UEs cannot transmit continuous messages like V2V supported UEs.
- Vehicle-to-Network (V2N): V2N transmission is between a vehicle and a V2X application server. A UE supporting V2N applications can communicate with the application server supporting V2N applications, while the parties communicate with each other using Evolved Packet Switching (EPS). V2X services are required for different applications and operation scenarios. It will help mobile operators to communicate the tasks of the Remote Switching Unit (RSU) over its network, reducing time to market, cost and eliminating the complexity of designing and running a purpose-built network for V2I as it could include communication between vehicles and the server via 4G or even 5G network. It does not need to be as precise as V2V but reliability is crucial
- Vehicle-to-Infrastructure (V2I): V2I application information is transmitted through a RSU or locally available application server. RSUs are roadside stationary units, which act as a transceiver. RSUs or available application servers receive the broadcast message and transmits the message to one or more UEs supporting V2I application. V2I can provide us with information, such as available parking space, traffic congestion, road condition, etc. Due to the high cost and lengthy deployment time, its application or installation is more challenging [8].
4. V2X Architecture:
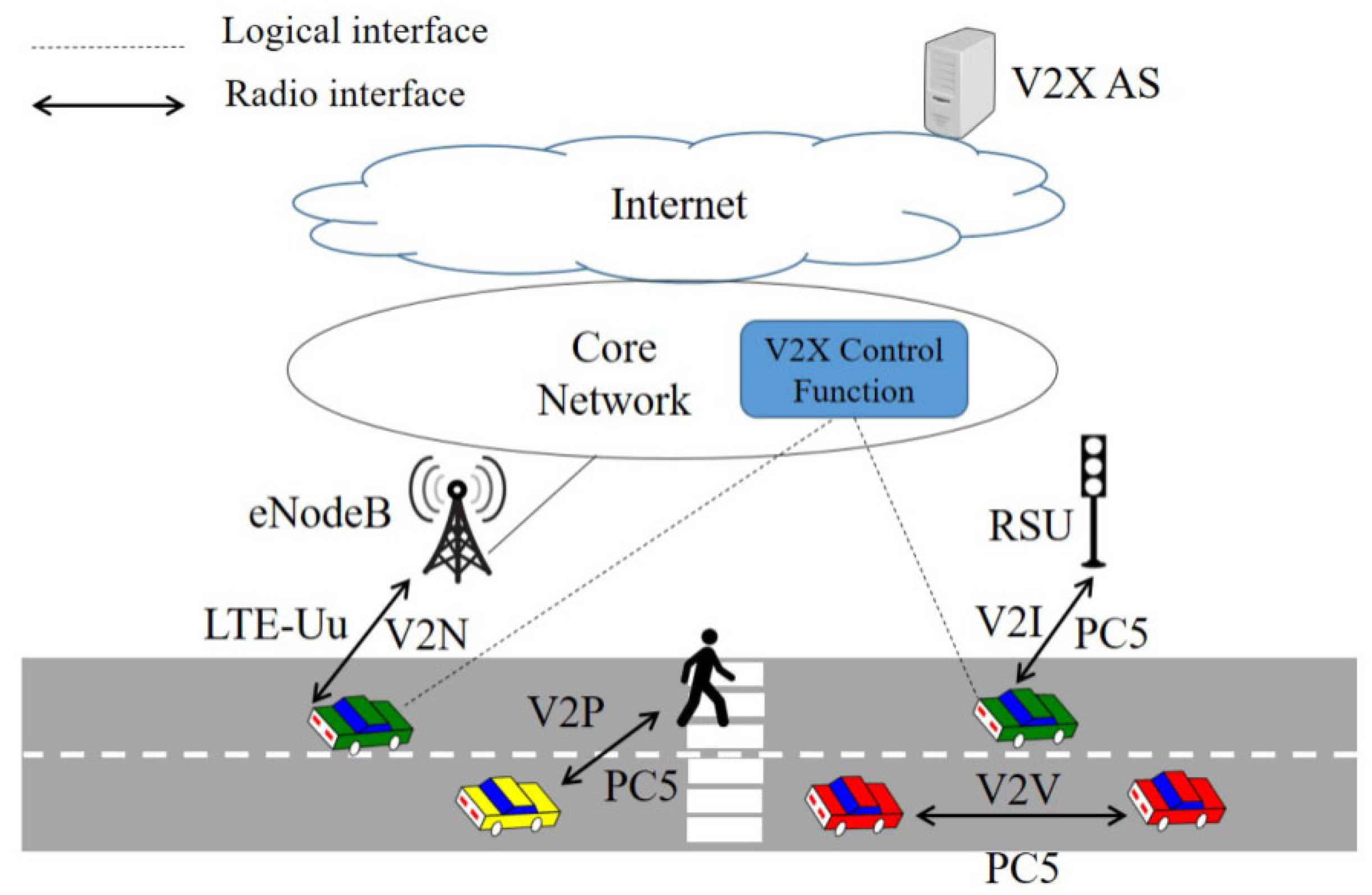
In this type of communication, PC5 interface is used to initiate a communication between various network devices, so V2X considered as an important application of Device-to-Device (D2D) communication. PC5 interface ensures one-to-many communication and also enables the use of LTE-Uu, which is the radio interface between UE and eNodeB (an element of an LTE Radio Access Network) [9]. A UE can operate in two modes of operation independently to transmit and receive data, these modes are unicast, and multimedia broadcast. PC5 interface and LTE-Uu can be used with different operation modes as described below.
- PC5 Based Communication: V2X messages are transmitted via PC5 and are received by UEs through PC5 and MBMS. With PC5, V2X messages are received by an RSU serving as a UE. Afterward, the RSU forwards the processed message to a V2X Application Server using the V1 interface. V2X Application Server processed messages are distributed to UEs through MBMS [10]. In this mode, the cellular network can deliver information from extended range. It enables advanced driving assistance applications.
- LTE-Uu based and PC5 based V2X Communication without MBMS: This mode supports communication of UE-type RSUs via PC5 for both transmission and reception of V2X messages. V2X application servers can communicate with the RSU through a cellular network. For instance, LTE-Uu is used to communicate V2X messages beyond the direct PC5 communication range. Based on such hybrid use of LTE-Uu and PC5-based V2X communications, MBMS broadcast of downlink data transmissions could be negligible [9]. This operation mode has got three components:
- To ensure adequate coverage to the available traffic, stationary infrastructures like UE-type RSUs are incorporated. This RSUs and UEs communicate with each other for V2X over PC5. The V2X Application Servers can also communicate with the UE-type RSUs.
- UE-type RSUs obtain V2X messages from other UEs via PC5. The V2X application of the RSUs evaluates whether the message should be routed to the V2X Application Servers over the LTE-Uu connection or not, in case of a larger target area (i.e. larger V2X communication coverage over PC5). The target area and the size of the area are determined by the V2X Application Servers, where the V2X messages are distributed. In the process of determining the coverage area, V2X Application Servers can communicate with each other.
- V2X downlink (‘Sidelink' in terms of D2D Communication) messages are sent by V2X Application Servers to the available RSU in the target distribution area. Afterward, the received message is broadcast by RSUs over PC5. UEs available in the same region are free to receive those broadcast data. In this process, vehicles operate using V2V/V2P services. When the UEs are employed as RSUs, they operate in a hybrid mode with simultaneous V2X communications over PC5 and LTE-Uu. These hybrid operations are also performed by UEs when they are unable to obtain a V2X signal directly from distant UEs via PC5 [12].
Figure 2.
V2X message transmission and reception over LTE-Uu using PC5 [11].
Figure 2.
V2X message transmission and reception over LTE-Uu using PC5 [11].
5. V2X Applications:
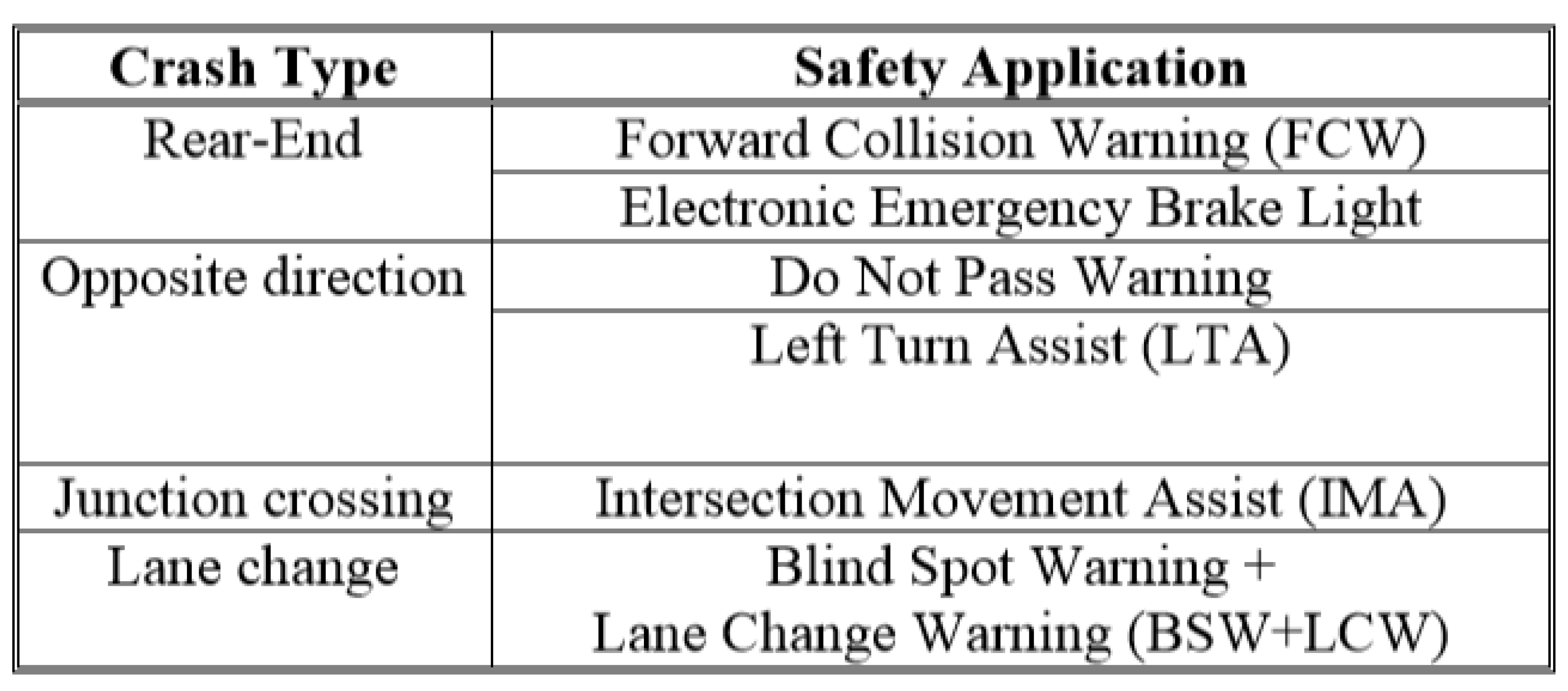
The applications used in V2X technology can be classified into three main categories, Service applications, Safety applications, and Effective applications [13]. Service applications are the applications that provide drivers with information that related to vehicle to improve driving, such as road information, steering recommendations and automated vehicle parking. Safety applications include forward collision warnings, electronic emergency brake light, road hazard warnings, speed warnings, and intersection movement assist, that refers to personal safety applications. Effective applications belong to applications that utilize effort and time to improve traffic efficiency. Table 1 below shows some safety applications [14].
6. Mathematical Modeling and Performance Analysis
In order to understand and evaluate the impact of Vehicle-to-Everything (V2X) communication systems, especially in urban and semi-urban environments, mathematical models are critical for simulating data flow, latency, packet loss, and other vital network performance indicators. This section introduces a set of mathematical models that reflect real-world behaviors of V2X networks and provides an analysis of simulated results for various V2X communication modes: V2V, V2I, V2N, and V2P.
6.1. Assumptions and Network Model:
To build a realistic V2X environment, we consider the following assumptions :
- Vehicles are distributed according to a Poisson Point Process (PPP) with a density λ_v vehicles/km.
- RSUs (Road Side Units) are distributed linearly along the road with a fixed spacing D.
- Communication occurs over a shared wireless channel using OFDM.
- Signal propagation follows a standard path-loss model with a path-loss exponent η.
- Transmit power is fixed and identical for all vehicles and infrastructure nodes.
6.2. Latency Model:
Latency (L) in V2X is primarily affected by processing delay, transmission delay, propagation delay, and queuing delay:
L_total = L_proc + L_tx + L_prop + L_queue
where:
- L_proc: processing delay at sender and receiver (assumed to be ~5ms)
- L_tx = Packet Size / Bandwidth
- L_prop = d / c (distance divided by speed of light ~3x10^8 m/s)
- L_queue: depends on traffic density and buffer capacity (modeled via M/M/1 queueing system)
Assuming:
- Packet size = 500 bytes
- Bandwidth = 10 MHz
- Distance = 100 m
Then: L_tx = (500*8 bits) / (10^7) = 0.4 ms L_prop = 100 / (3x10^8) = 0.00033 ms
Thus: L_total (ideal) = 5 + 0.4 + 0.00033 ≈ 5.4 ms
In real congested conditions, queuing delay L_queue may reach 20 ms, making L_total ≈ 25.4 ms
6.3. Packet Delivery Ratio (PDR)
Packet delivery ratio is a key performance metric defined as:
PDR = P(successful delivery) = exp(-β*d)
where β is the attenuation coefficient and d is the distance. For V2V communication with β = 0.01 and d = 100m:
PDR = exp(-0.01*100) = exp(-1) ≈ 0.367 (36.7%)
With relays (multi-hop): PDR_multi-hop = 1 - (1 - PDR)^n, where n = number of relays Assuming 2 relays: PDR_multi-hop = 1 - (1 - 0.367)^2 = 0.601 (60.1%)
6.4. Throughput Model:
Throughput T (in Mbps) is calculated as:
T = (PDR * Packet Size * 8) / L_total
Using:
- Packet Size = 500 bytes
- L_total = 25.4 ms (real condition)
- PDR = 0.367
T = (0.367 * 500 * 8) / 25.4 ≈ 57.8 kbps
In optimal condition (PDR = 1, L_total = 5.4 ms): T_opt = (1 * 500 * 8) / 5.4 ≈ 740.7 kbps
6.5. Simulation Results and Analysis
To validate the above models, simulations were conducted to emulate V2X scenarios across varying traffic densities, distances, and RSU deployments. The following patterns were observed, see Fig.3:
Figure 1.
Performance Analysis.
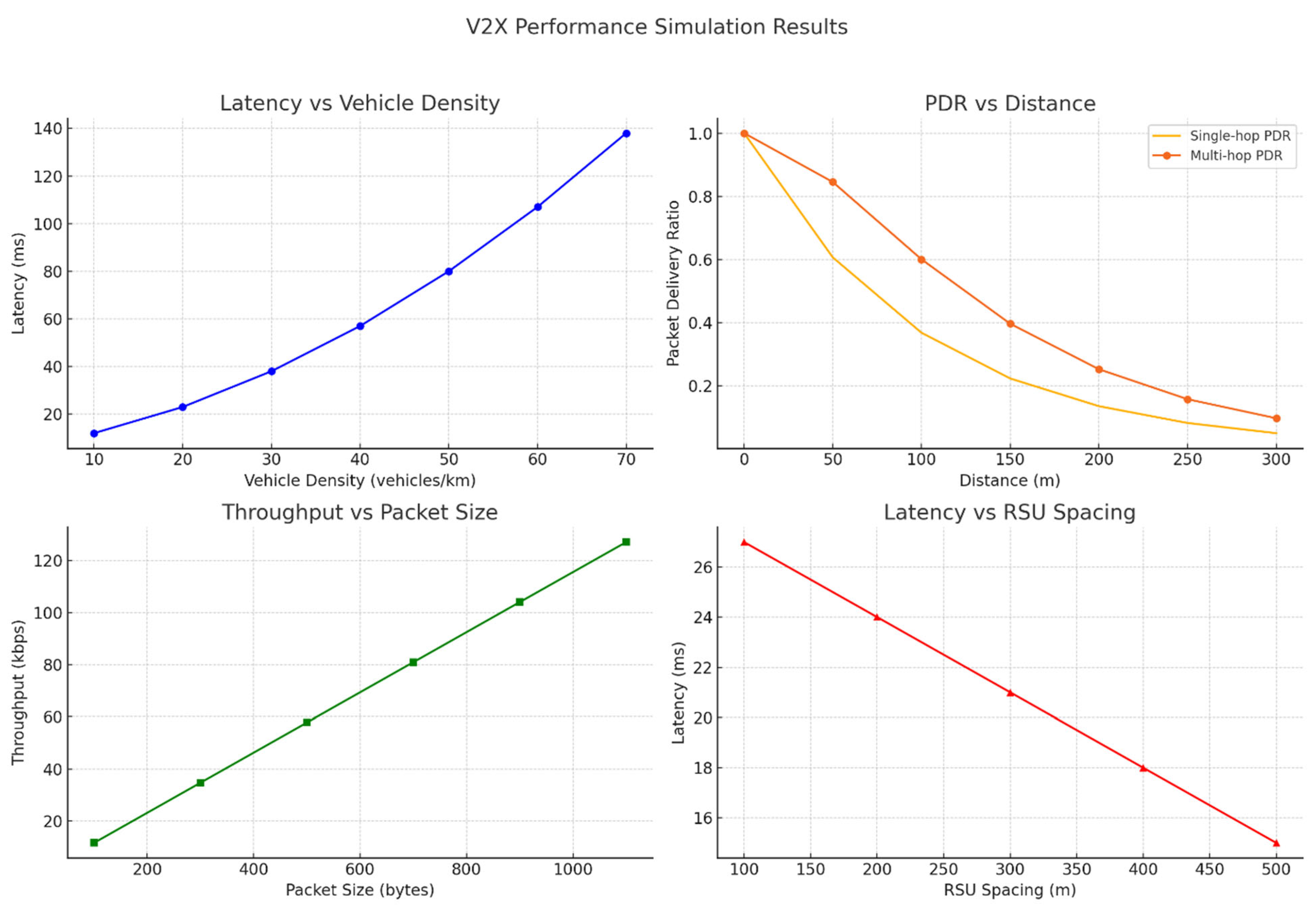
The analysis shows that V2X performance is highly sensitive to network topology and traffic conditions. In dense urban settings, delay and packet loss become significant without effective queuing mechanisms or RSU deployment strategies. V2V communications struggle with long-range reliability, making multi-hop relays a necessary design component. Additionally, latency-sensitive applications like crash avoidance require optimized packet sizes and minimal queuing.
Future enhancements could include AI-based adaptive routing, congestion-aware RSU selection, and beamforming for V2I links to further improve reliability and throughput. The mathematical modeling here offers a foundational understanding for implementing and testing such strategies in real deployments.
7. V2X Limitations and Challenges:
In general, V2X networks can be divided into two main networks: Intra-Vehicle networks, and Inter-Vehicle networks. Intra-vehicle wireless sensor networks show unique characteristics that differ from generic wireless sensor networks. Although there are good and encouraging factors, but there are challenges to design and deployment intra-vehicle networks [16], these challenges involve: The severe environment of communication, due to the cruel scattering in a small space [17], for safety applications, low latency and high reliability are required to transmit data, To meet the stringent requirement of real-time intra-vehicle control system, because of the proximity distances between vehicles in the roads, especially congested ones, the probability of interference between signals can be high [18].
Inter-Vehicle networks also suffer from many challenges, these challenges are mentioned in briefly in this section. In traffic safety applications, fast and reliable information are required to describe the current traffic situation, and the possible hazards that can in the near surrounding. any updating in information of one vehicle must be provided to all vehicles in the near surrounding. For safety applications the communication requires the periodical exchange of broadcast messages. the messages within the safety-relevant surrounding, need to be received with high probability of success, and the updating of these information messages needs to be high as well. in addition, the safety applications need to minimize the time of delivering the messages between vehicles as possible as short. A preliminary estimation on the communication requirements that have to be provided for traffic safety applications, has been provided by the final report of the VSC project [WWW VSC 2006, p.18]. The report mentioned that the messages of a size of a few hundred bytes (200 –500byte) are periodically transmitted several times per second (every100ms) as well as being transmitted on an event-driven basis [18].
8. Conclusions:
This paper has explored the transformative potential of Vehicle-to-Everything (V2X) communication in creating safer, smarter, and more efficient transportation systems. Through a survey of existing technologies, architectures, and communication protocols, along with rigorous mathematical modeling and simulation, the study underscores the impact of factors such as RSU density, relay support, and traffic volume on V2X performance. Results reveal that multi-hop communication and dense infrastructure significantly enhance packet delivery and reduce latency. Nonetheless, V2X implementation continues to face challenges related to network congestion, real-time reliability, and environmental interference. Future work should emphasize integrating machine learning for adaptive routing, deploying secure fog-based RSU networks, and enabling low-latency communication for autonomous mobility. V2X is a cornerstone of next-generation ITS, and its evolution will shape the future of road safety and intelligent mobility.
References
- Y. Shi, X. H. Y. Shi, X. H. Peng, and G. Bai, “Efficient V2X Data Dissemination in Cluster-Based Vehicular Networks”, The Seventh International Conference on Advances in Vehicular Systems, Technologies and Applications, IARIA, 2018.
- https://en.wikipedia.org/wiki/Vehicle-to-everything.
- Molinaro, and C. Campolo, “5G for V2X Communications”, University Mediterranea of Reggio Calabria, Loc. Feo di Vito, Reggio Calabria, Italy.
- https://www.transportation.gov/testimony/driving-safer-tomorrow-vehicle-vehicle-communications-and-connected-roadways-future.
- 3GPP TS 22.185, “Service requirements for V2X services”, Release 15, 2018.
- “Radio Interface Standards of Vehicle-to-Vehicle and Vehicle-to-Infrastructure Communications for Intelligent Transport System Applications”, Recommendation ITU-R M.2084-0, September 2015.
- Dr. M. Vanderveen, and K. Shukla, “Cellular V2X Communications Towards 5G”, 5G Americas (White Paper), March 2018.
- M. T. Kawser, M. S. Fahad, S. Ahmed, S. S. Sajjad, and H. A. Rafi, “The Perspective of Vehicle-to-Everything (V2X) Communication towards 5G”. IJCSNS International Journal of Computer Science and Network Security 2019, 19. [Google Scholar]
- 3GPP TS 23.285, “Architecture enhancements for V2X services”, Release 15, 2018.
- E. Dahlman, S. E. Dahlman, S. Parkvall, and J. Sköld, “4G LTE - Advanced Pro and The Road to 5G”, Elsevier Ltd., pp. 461486, ISBN: 978-0-12-804575-6.
- M. Amadeo, C. M. Amadeo, C. Campolo, A. Molinaro, J. Harri, C. E. Rothenberg, and A. Vinel, “Enhancing the 3GPP V2X Architecture with Information-Centric Networking”, Future Internet, MDPI journal, 2019.
- Zi. Liu, Zh. Liu, Z. Meng, X. Yang, L. Pu, and L. Zhang, “Implementation and performance measurement of a V2X communication system for vehicle and pedestrian safety. International Journal of Distributed Sensor Networks 2016, 12. [Google Scholar]
- CSAE, Cooperative Intelligent Transportation System, Vehicular Communication, Application Layer Specification and Data Exchange Standard, T/CSAE 0053-2017, CSAE: Beijing, China, 2017.
- J. Wang, Y. Shao, Y. Ge, and R. Yu, “A Survey of Vehicle to Everything (V2X) Testing. Sensors 2019. [Google Scholar]
- J. Harding, G. R. Powell, R. Yoon, J. Fikentscher, C. Doyle, D. Sade, M. Lukuc, J. Simons, and J. Wang, “Vehicle-to-Vehicle Communications: Readiness of V2V Technology for Application”, National Highway Traffic Safety Administration 1200 New Jersey Avenue SE. Washington, DC 20590, August 2014.
- N. Lu, N. Cheng, N. Zhang, X. Shen, and J. W. Mark, “Connected Vehicles: Solutions and Challenges. IEEE Internet of Things Journal 2014, 1. [Google Scholar]
- H. M. Tsai, W. Viriyasitavat, O. K. Tonguz, C. Saraydar, T. Talty, and A. Macdonald, “Feasibility of in-car wireless sensor networks: A statistical evaluation,” in Proc. IEEE SECON, San Diego, CA, USA, June 2007.
- F. S. Eisenlohr, “Interference in Vehicle-to-Vehicle Communication Networks Analysis, Modeling, Simulation and Assessment”, Handbook, KIT Scientific Publishing 2010.
- Q. I. Ali, "Design, implementation & optimization of an energy harvesting system for VANETs’ road side units (RSU). IET Intelligent Transport Systems 2014, 8, 298–307. [Google Scholar]
- Q. I. Ali, "An efficient simulation methodology of networked industrial devices," in Proc. 5th Int. Multi-Conference on Systems, Signals and Devices, 2008, pp. 1-6.
- Q. I. Ali, "Security issues of solar energy harvesting road side unit (RSU). Iraqi Journal for Electrical & Electronic Engineering 2015, 11. [Google Scholar]
- Q. I. Ali, "Securing solar energy-harvesting road-side unit using an embedded cooperative-hybrid intrusion detection system. IET Information Security 2016, 10, 386–402. [Google Scholar] [CrossRef]
- Q. Ibrahim, "Design & Implementation of High-Speed Network Devices Using SRL16 Reconfigurable Content Addressable Memory (RCAM). Int. Arab. J. e Technol. 2011, 2, 72–81. [Google Scholar]
- M. H. Alhabib and Q. I. Ali, "Internet of autonomous vehicles communication infrastructure: a short review. Diagnostyka 2023, 24. [Google Scholar]
- Q. I. Ali, "Realization of a robust fog-based green VANET infrastructure. IEEE Systems Journal 2022, 17, 2465–2476. [Google Scholar]
- Q. I. Ali and J. K. Jalal, "Practical design of solar-powered IEEE 802.11 backhaul wireless repeater," in Proc. 6th Int. Conf. on Multimedia, Computer Graphics and Broadcasting, 2014.

Table 1.
Safety applications [15].
 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



