Submitted:
05 March 2025
Posted:
05 March 2025
You are already at the latest version
Abstract
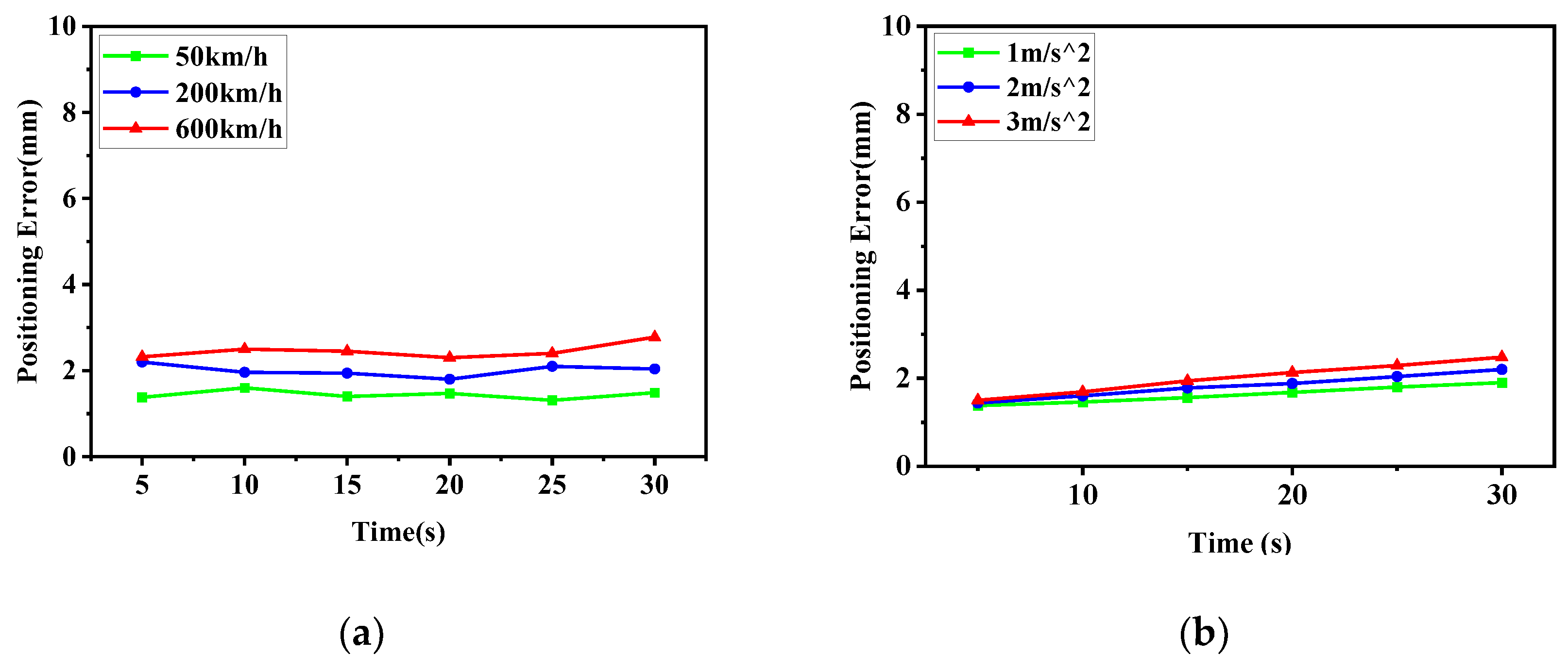
In order to solve the testing and verification problems at the early development stage of high-speed maglev positioning and speed measurement system(MPSS), a hardware-in-the-loop (HIL) simulation platform is presented, which includes induction loops, transmitting antennas, power driver unit, FPGA simulator and host computer, etc. This HIL simulation platform simulates the operation of high-speed maglev train and generates the related loop induced signals to test the performance of a real ground signal processing unit(GSPU). Furthermore, an absolute position detection method based on Gray-coded loops is proposed to identify which Gray-coded period the train is in. A relative position detection method based on height compensation is also proposed to calculate the exact position of the train in a Gray-coded period. The experimental results show that the positioning error is only 2.58mm, and the speed error is 6.34km/h even in the 600km/h condition. The proposed HIL platform also effectively simulates three kinds of operation modes of high-speed maglev trains, which verifies the effectiveness and practicality of the HIL simulation strategy. It is of great significance for the development and early validation of high-speed MPSS.
Keywords:
1. Introduction
2. Principle of Positioning
2.1. Composition and Principle of MPSS
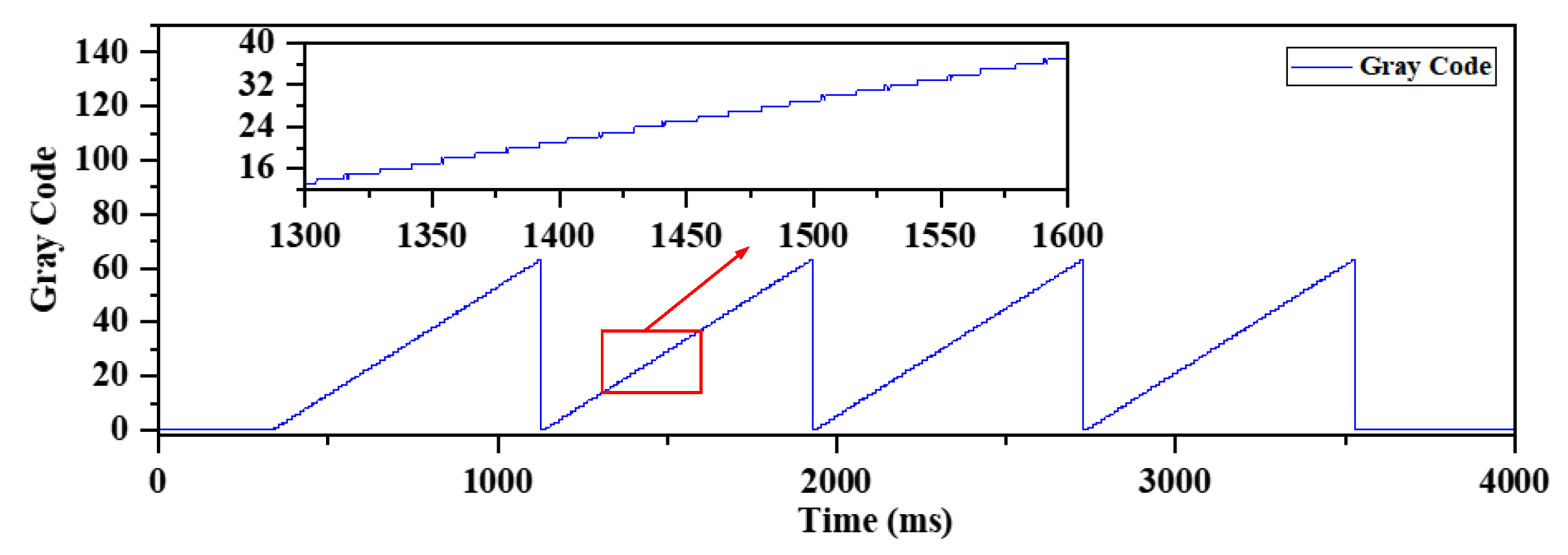
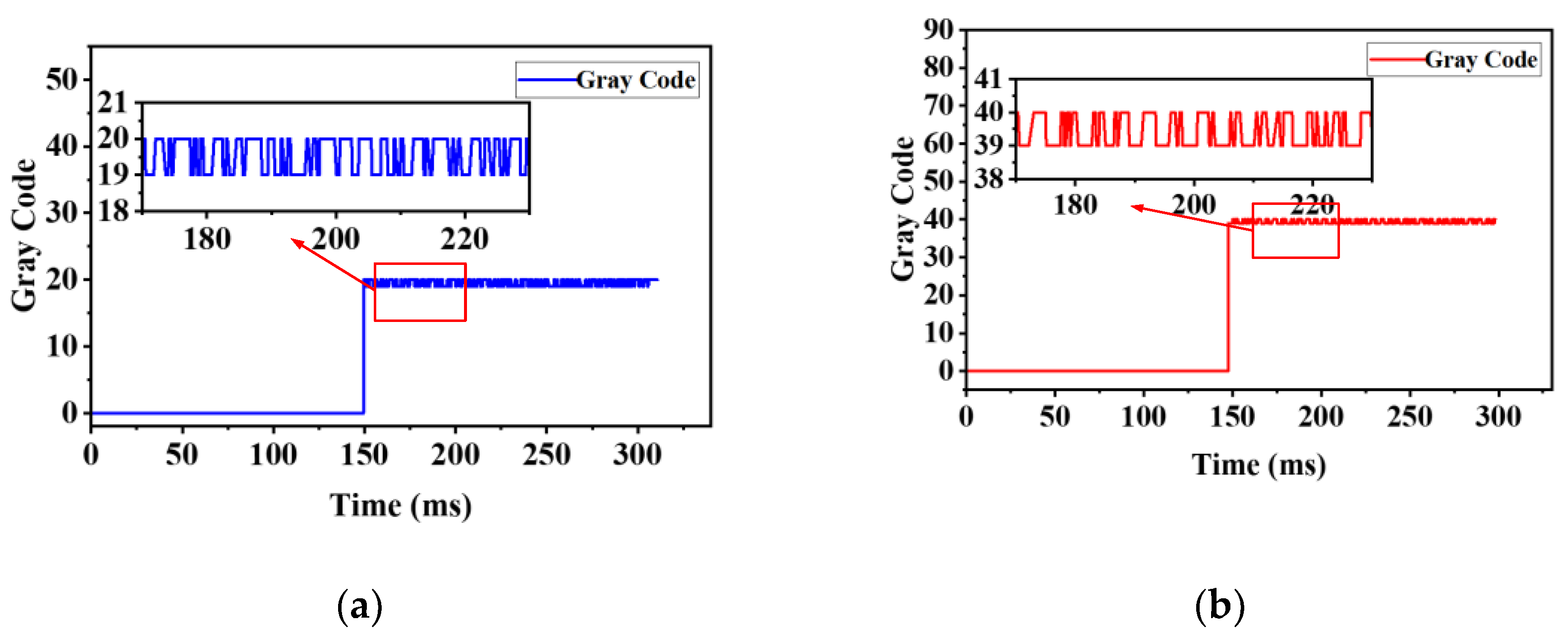
2.2. Absolute Position Detection Based on Gray-Coded Loops
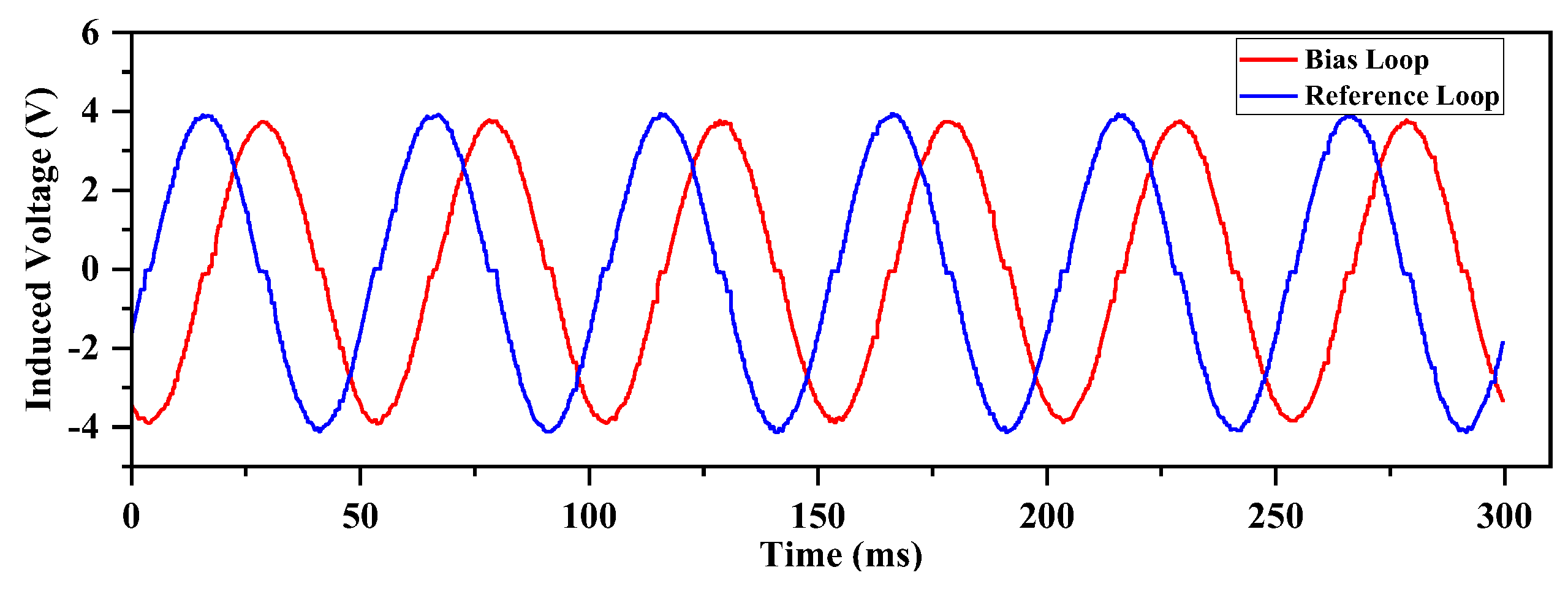
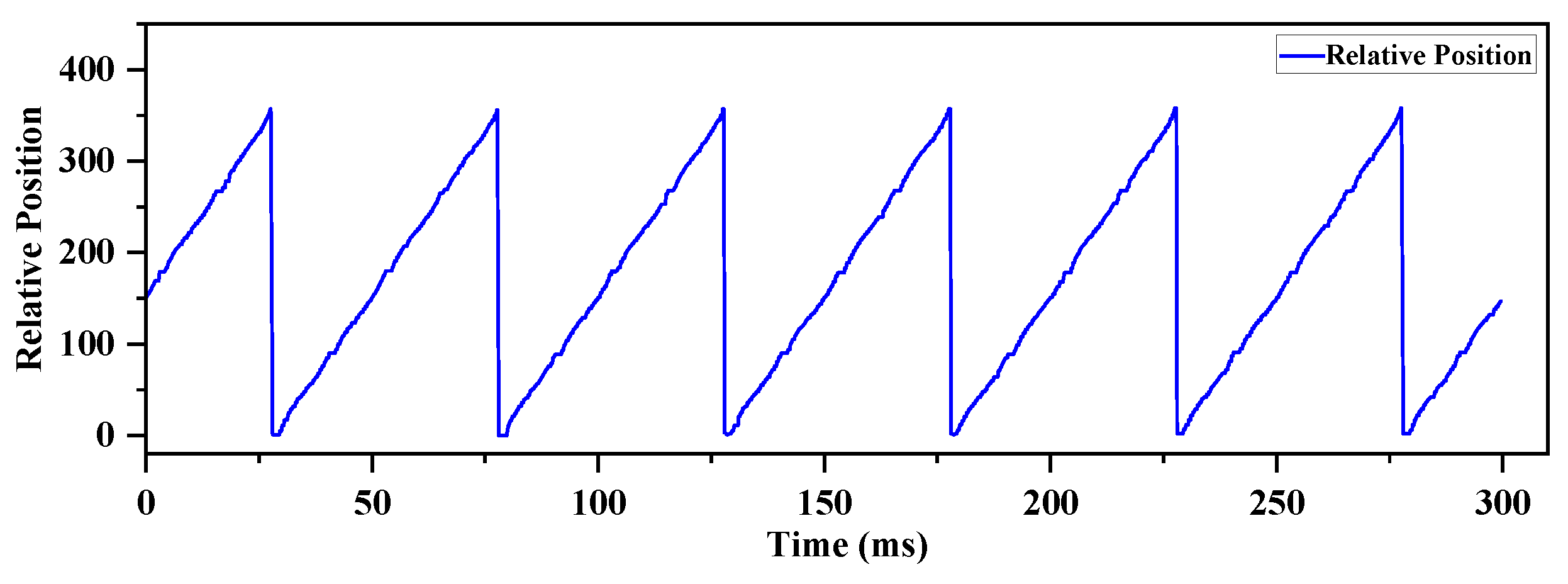
2.3. Relative Position Detection Based on Height Compensation
3. Signal Reconstruction Based on Parallel Signal Simulation
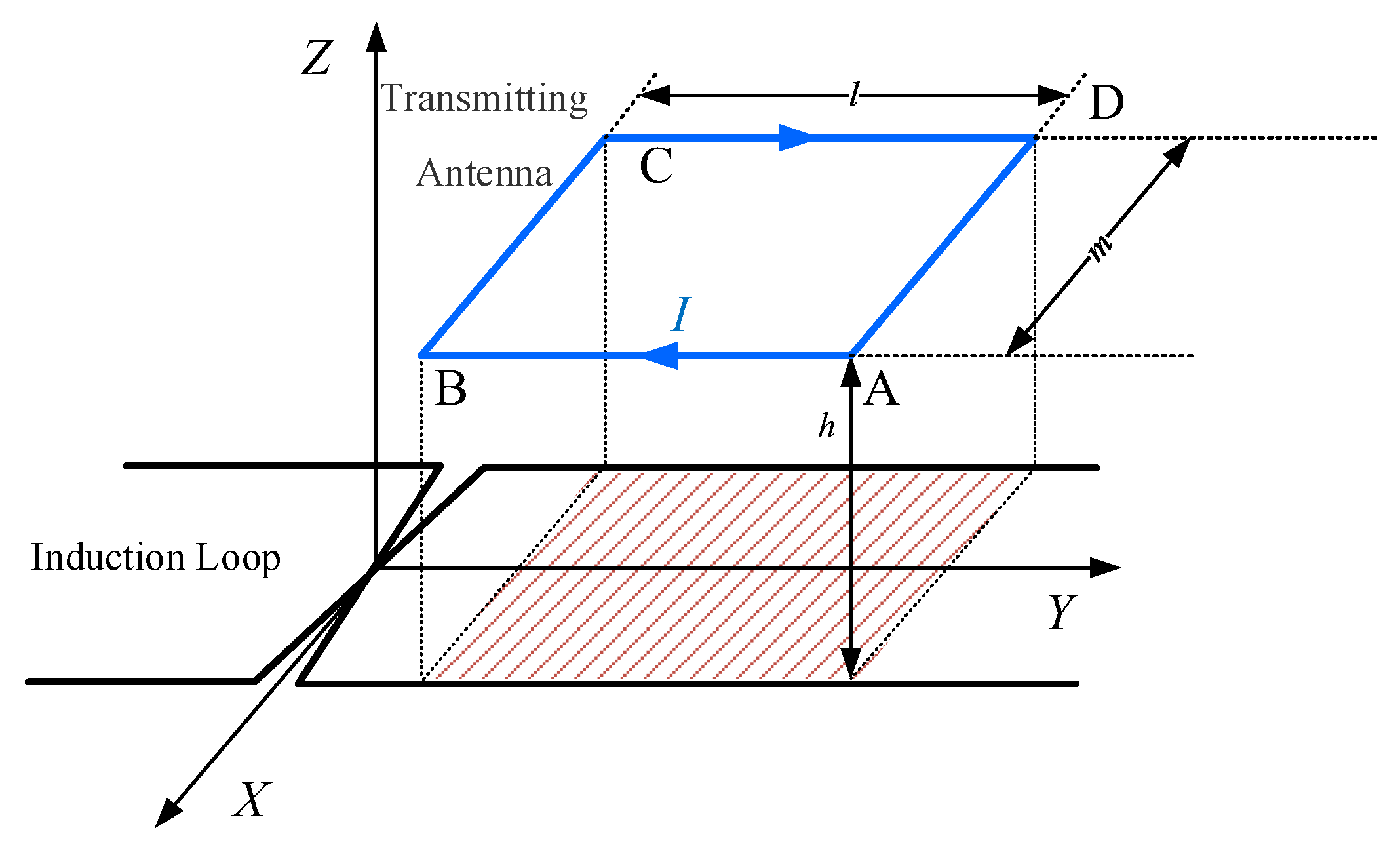
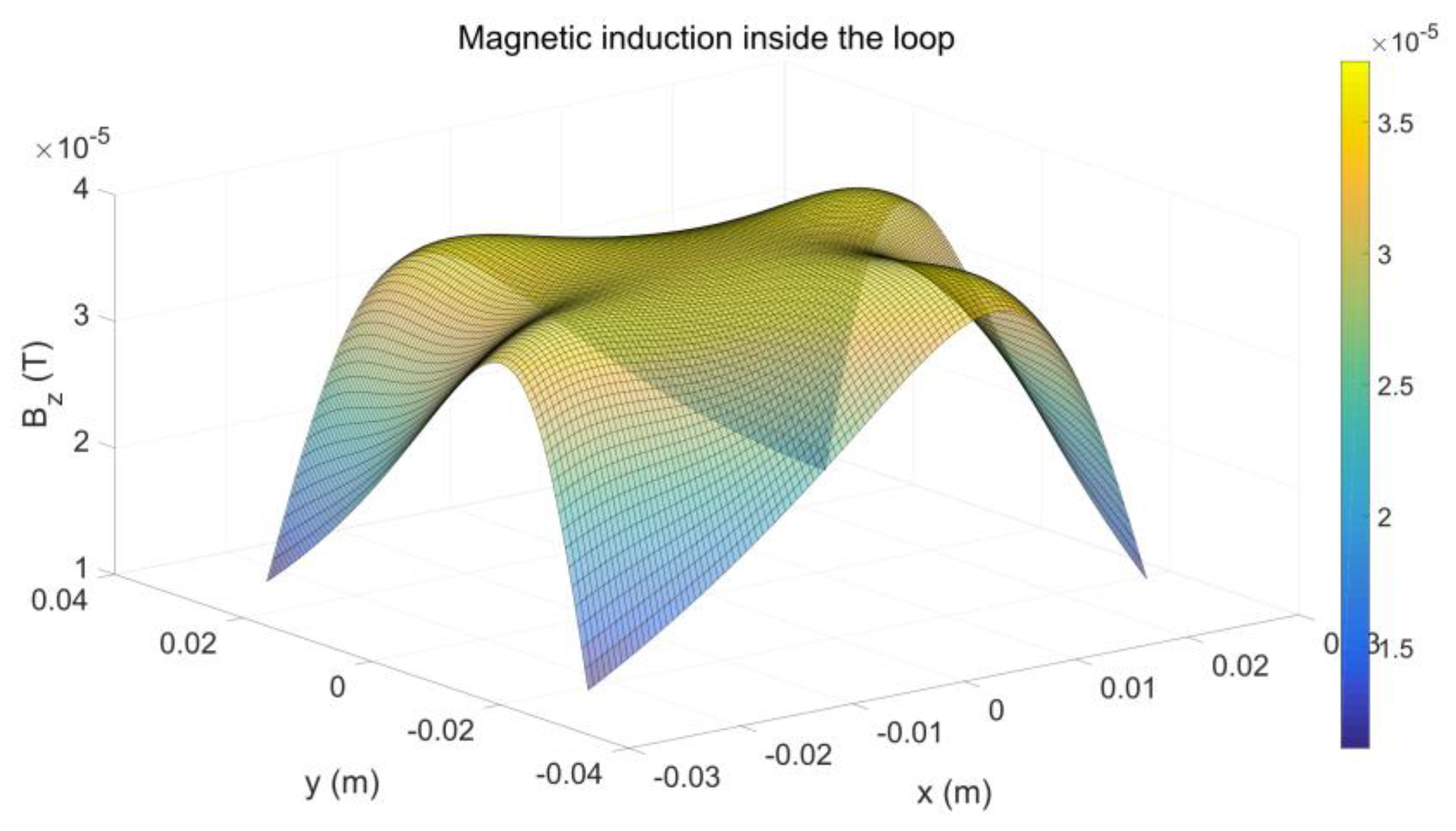
3.1. Analysis of Induced Signal Amplitude and Train Position
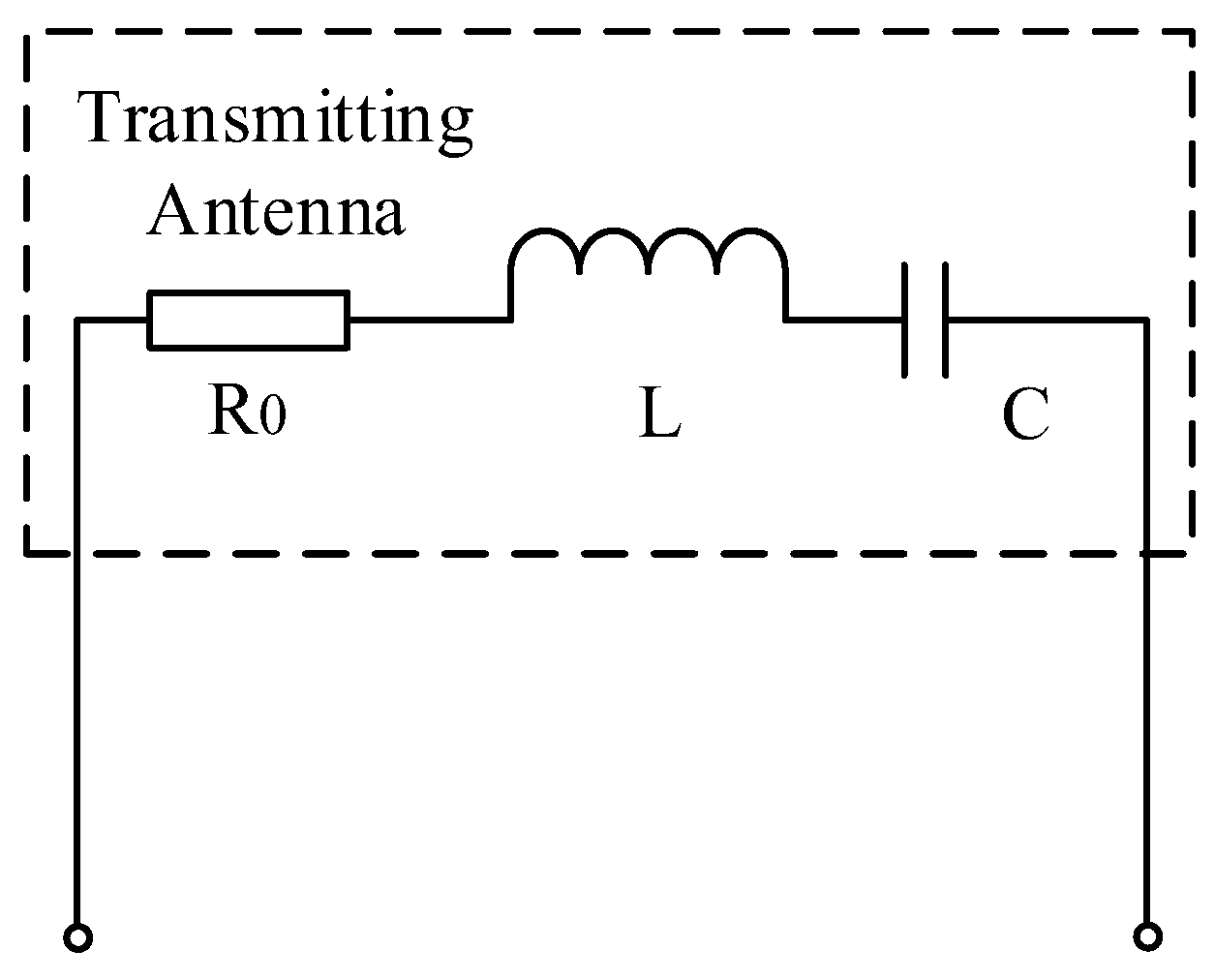
3.2. Analysis of Antenna Resonant Current and PWM Signal Duty Cycle
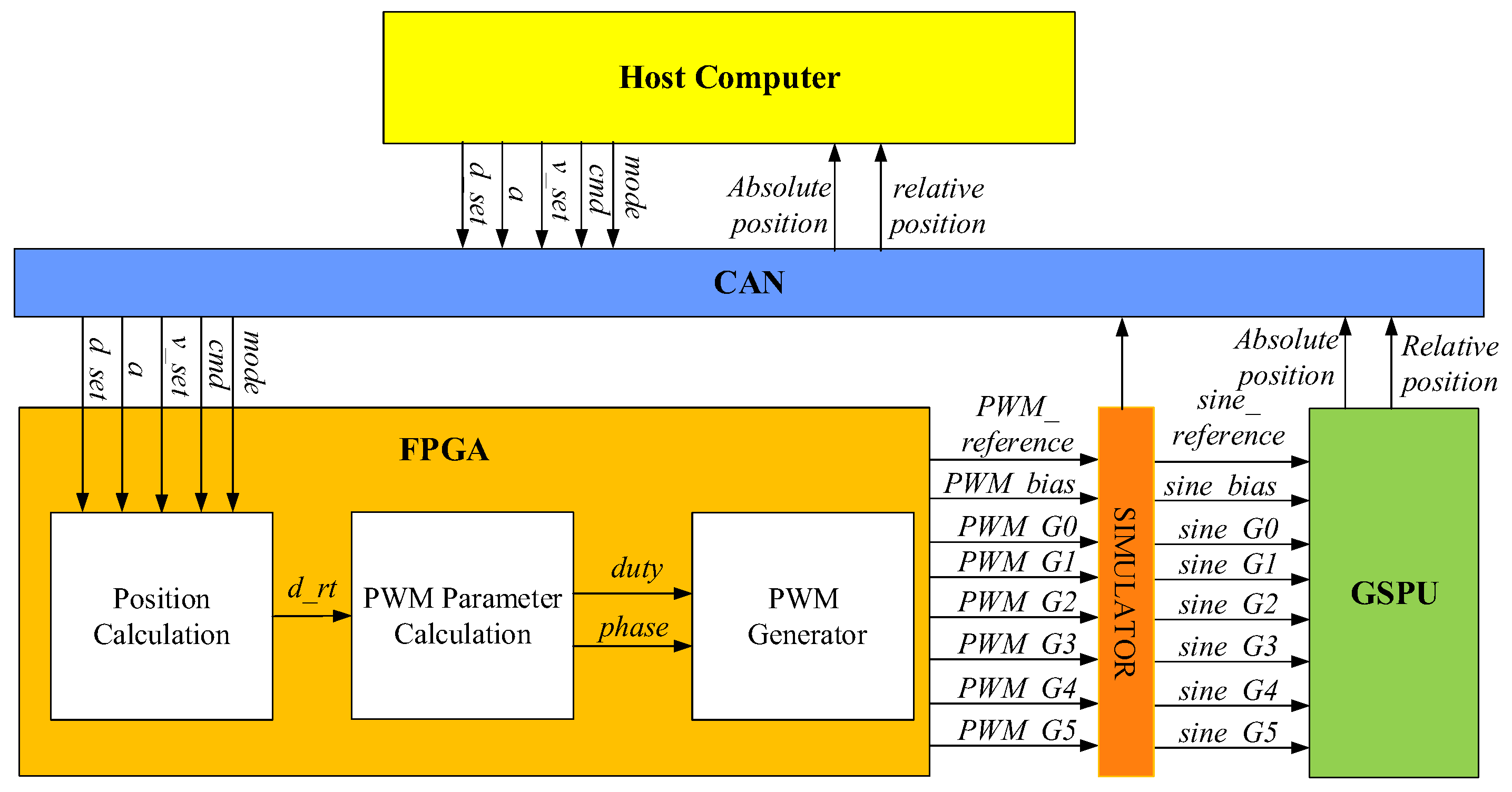
4. Implement of the HIL Platform
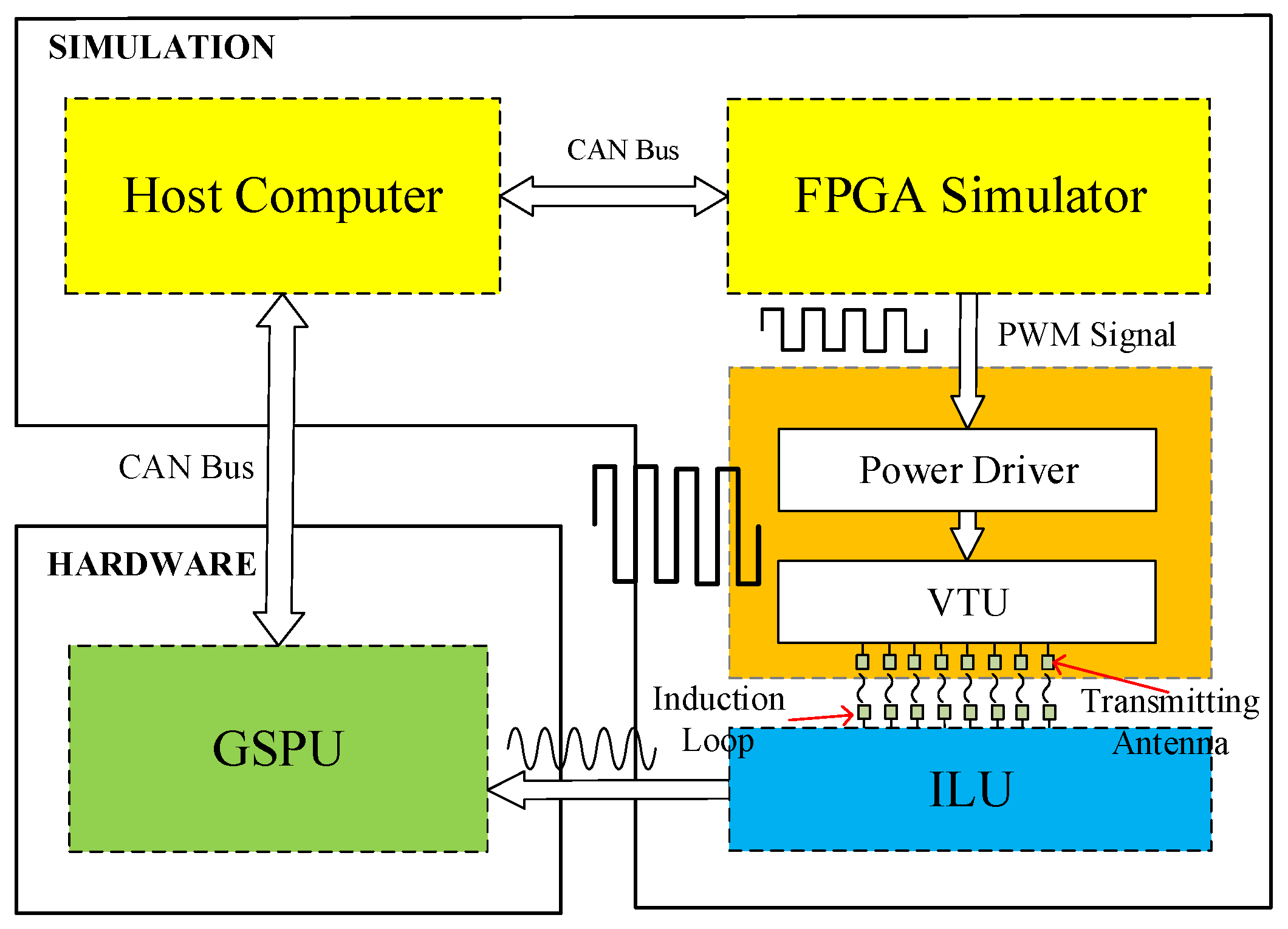
4.1. Platform Structure Design
4.2. Platform Hardware and Software Design
5. Results
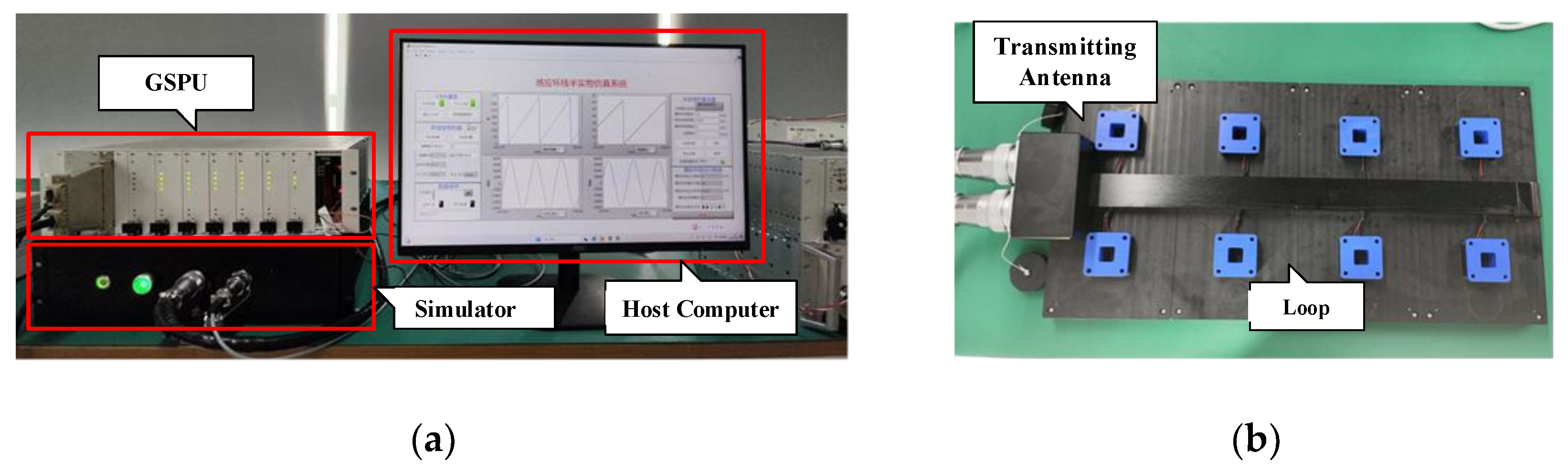
5.1. Physical Construction of Platforms
5.2. Functional Verification
5.2.1. Instantaneous Speed Mode Analysis
5.2.2. Instantaneous Position Mode Analysis
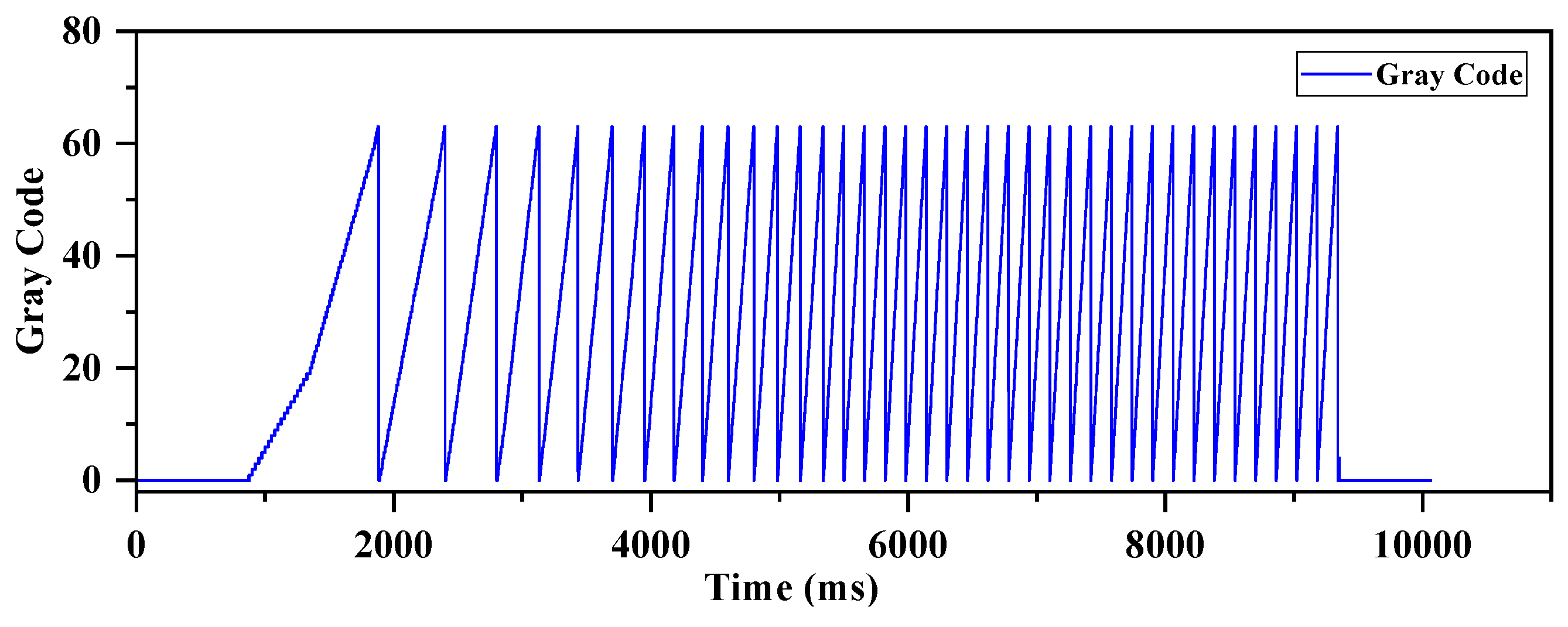
5.2.3. Acceleration Mode Analysis
5.3. Analysis of Experimental Results
6. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MPSS | Maglev Positioning and Speed measurement System |
| HIL | Hardware-In-the-Loop |
| FPGA | Field Programmable Gate Array |
| GSPU | Ground Signal Processing Unit |
| TCS | Traction Control System |
| EMI | ElectroMagnetic Interference |
| LIM | Linear Induction Motors |
| OCS | Operation Control Systems |
| PWM | Pulse Width Modulation |
| VTU | Vehicle Transmission Unit |
| ILU | Induction Loop Unit |
References
- Yan, L. Development and Application of the Maglev Transportation System. IEEE Transactions on Applied Superconductivity 2008, 18, 92–99. [CrossRef]
- Lin, P.; Deng, Z.; Ke, Z.; Lei, W.; Wang, X.; Ren, K. Dynamic Characteristics and Working Modes of Permanent Magnet Electrodynamic Suspension Vehicle System Based on Six Wheels of Annular Halbach Structure. Technologies 2023, 11, 16–16. [CrossRef]
- Ding, J.; Yang, X.; Long, Z.; Dang, N. Three-Dimensional Numerical Analysis and Optimization of Electromagnetic Suspension System for 200 Km/H Maglev Train Considering Eddy Current Effect. IEEE Access 2018, 6, 61547–61555. [CrossRef]
- Zhu, Q.; Wang, S.; Ni, Y. A Review of Levitation Control Methods for Low- and Medium-Speed Maglev Systems. Buildings 2024, 14, 837–837. [CrossRef]
- Zhang, D.; Long, Z.; Dai, C. Design and Realization of a Novel Position-And-Speed Measurement System with Communication Function for the Low-Speed Maglev Train. Sensors and Actuators A Physical 2013, 203, 261–271. [CrossRef]
- Jiang, S.; Wang, Y.; Liang, L.; Zhang, H.; Deng, Z. Truth-Correction-Based Multisensor Fusion Method for HTS Maglev Train’s Position Detection. IEEE Transactions on Instrumentation and Measurement 2023, 73, 1–14. [CrossRef]
- Li, F.; Sun, Y.; Xu, J.; He, Z.; Lin, G. Control Methods for Levitation System of EMS-Type Maglev Vehicles: An Overview. Energies 2023, 16, 2995–2995. [CrossRef]
- Xu, Y.; Fan, K.; Hu, Q.; Zhang, X. Positioning of Suspended Permanent Magnet Maglev Trains Using Satellite-Ground Multi-Sensor Fusion. IEEE Sensors Journal 2024, 24, 16816–16825. [CrossRef]
- Huang, W.; Tong, X.; Zeng, F.; Li, C.; Wang, Y. Maglev Train High-Precision Positioning Technology Based on FBG Array Time Division Multiplexing. Measurement 2024, 115160–115160. [CrossRef]
- Zhang, L.; Huang, J. Dynamic Interaction Analysis of the High-Speed Maglev Vehicle/Guideway System Based on a Field Measurement and Model Updating Method. Engineering Structures 2019, 180, 1–17. [CrossRef]
- Mihalič, F.; Truntič, M.; Hren, A. Hardware-In-The-Loop Simulations: A Historical Overview of Engineering Challenges. Electronics 2022, 11, 2462. [CrossRef]
- Montoya, J.; Brandl, R.; Vishwanath, K.; Johnson, J.; Darbali-Zamora, R.; Summers, A.; Hashimoto, J.; Kikusato, H.; Ustun, T.S. Advanced Laboratory Testing Methods Using Real-Time Simulation and Hardware-In-The-Loop Techniques: A Survey of Smart Grid International Research Facility Network Activities. Energies 2020, 13, 3267. [CrossRef]
- Arzate-Rivas, O.; Víctor Sámano-Ortega; Martínez-Nolasco, J.; Santoyo-Mora, M.; Martínez-Nolasco, C.; León-Lomelí, R.D. IoT Energy Management System Based on a Wireless Sensor/Actuator Network. Technologies 2024, 12, 140–140. [CrossRef]
- Amel Kasri; Kamel Ouari; Youcef Belkhier; Adel Oubelaid; Bajaj, M.; Milkias Berhanu Tuka Real-Time and Hardware in the Loop Validation of Electric Vehicle Performance: Robust Nonlinear Predictive Speed and Currents Control Based on Space Vector Modulation for PMSM. Results in Engineering 2024, 22, 102223–102223. [CrossRef]
- Wei, B. Discussion on Test Scheme for Train Integrity Functions in New Train Control System. Railway Signalling & Communication Engineering 2023, 20(05), 21-26+31. [CrossRef]
- Sun, X.; Jin, Z.; Xue, M.; Tian, X. Adaptive ECMS with Gear Shift Control by Grey Wolf Optimization Algorithm and Neural Network for Plug-in Hybrid Electric Buses. IEEE transactions on industrial electronics 2024, 71, 667–677. [CrossRef]
- Marinescu, A.; Taylor, A.; Clarke, S.; Serban, I.; Marinescu, C. Optimising Residential Electric Vehicle Charging under Renewable Energy: Multi-Agent Learning in Software Simulation and Hardware-In-The-Loop Evaluation. International Journal of Energy Research 2019, 43, 3853–3868. [CrossRef]
- Yang, X.; Yang, C.; Peng, T.; Chen, Z.; Liu, B.; Gui, W. Hardware-In-The-Loop Fault Injection for Traction Control System. IEEE Journal of Emerging and Selected Topics in Power Electronics 2018, 6, 696–706. [CrossRef]
- Zhao, Y.; Liu, Y.; Yang, S.; Liao, Y.; Chen, Z. Analysis on New Semi-Active Control Strategies to Reduce Lateral Vibrations of High-Speed Trains by Simulation and Hardware-In-The-Loop Testing. Proceedings of the Institution of Mechanical Engineers, Journal of Rail and Rapid Transit 2022, 236, 960–972. [CrossRef]
- Bernal, E.; Maksym Spiryagin; Cole, C. Ultra-Low Power Sensor Node for On-Board Railway Wagon Monitoring. IEEE Sensors Journal 2020, 20, 15185–15192. [CrossRef]
- Hägele, N.; Dignath, F. Vertical Dynamics of the Maglev Vehicle Transrapid. Multibody System Dynamics 2008, 21, 213–231. [CrossRef]
- Wang, H.; Ge, X.; Liu, Y.-C. Second-Order Sliding-Mode MRAS Observer-Based Sensorless Vector Control of Linear Induction Motor Drives for Medium-Low Speed Maglev Applications. IEEE Transactions on Industrial Electronics 2018, 65, 9938–9952. [CrossRef]
- Hu, H.; Zhong, J.; Chen, Y.; Ge, Q.; Wang, T. Research on Sectional Constant Slip Control of Linear Induction Motor Based on Parameter Self-Tuning. Energy Reports 2023, 9, 979–989. [CrossRef]
- Behzad Jandaghi; Venkata Dinavahi Hardware-In-The-Loop Emulation of Linear Induction Motor Drive for MagLev Application. IEEE Transactions on Plasma Science 2016, 44, 679–686. [CrossRef]
- Zhang, W.; Lin, G.; Hu, K.; Liao, Z.; Wang, H. Operation Control Method for High-Speed Maglev Based on Fractional-Order Sliding Mode Adaptive and Diagonal Recurrent Neural Network. Energies 2023, 16, 4566–4566. [CrossRef]
- Cao, X.; Ge, Q.; Zhu, J.; Kong, G.; Zhang, B.; Wang, X. Improved Sliding Mode Traction Control Combined Sliding Mode Disturbance Observer Strategy for High-Speed Maglev Train. IEEE Transactions on Power Electronics 2023, 38, 827–838. [CrossRef]
- Yang, J.; Gao, T.; Yuan, S.; Shi, H.; Zhang, Z. Research on Hardware-In-The-Loop Simulation of Single Point Suspension System Based on Fuzzy PID. International Journal of Grid and Utility Computing 2020, 11, 291–291. [CrossRef]
- Onur Akbatı; Hatice Didem Üzgün; Akkaya, S. Hardware-In-The-Loop Simulation and Implementation of a Fuzzy Logic Controller with FPGA: Case Study of a Magnetic Levitation System. Transactions of the Institute of Measurement and Control 2018, 41, 2150–2159. [CrossRef]
- Cao, X.; Ge, Q.; Zhu, J.; Zhao, L.; Zeng, D. Periodic Traction Force Fluctuations Suppression Strategy of Maglev Train Based on Flux Linkage Observation and Harmonic Current Injection. IEEE Transactions on Transportation Electrification 2023, 9, 3434–3451. [CrossRef]
- Zhu, J.; Cao, X.; Ge, Q.; Zeng, D. Adaptive-SMO-Based Traction Force Fluctuation Suppression Strategy Considering Suspension System for High-Speed Maglev Train. IEEE Transactions on Industrial Electronics 2024, 71, 2289–2299. [CrossRef]
- Lee, H.-W.; Kim, K.-C.; Lee, J. Review of Maglev Train Technologies. IEEE Transactions on Magnetics 2006, 42, 1917–1925. [CrossRef]
- Zhong, Z.; Shao, Z.; Yang, M.; Wang, X.; Xiao, Q.; Wang, Y. Quasi-Synchronous Operation Principle of a Variable Air-Gap Doubly Fed Linear Motor for High-Speed Maglev Application. IEEE Transactions on Transportation Electrification 2023, 9, 2929–2940. [CrossRef]
- Sun, L.; Taylor, J.; Guo, X.; Cheng, M.; Emadi, A. A Linear Position Measurement Scheme for Long-Distance and High-Speed Applications. IEEE Transactions on Industrial Electronics 2020, 68, 4435–4447. [CrossRef]
- Jo, J.-M.; Lee, J.-H.; Han, Y.-J.; Lee, C.-Y.; Lee, K.-S. Development of Propulsion Inverter Control System for High-Speed Maglev Based on Long Stator Linear Synchronous Motor. Energies 2017, 10, 170–170. [CrossRef]
- Dai, C.; Dou, F.; Song, X.; Long, Z. Analysis and Design of a Speed and Position System for Maglev Vehicles. sensors 2012, 12, 8526–8543. [CrossRef]
- Jo, J.-M.; Lee, C.-Y.; Kim, J.H. Relationship between the Shape of Cross-Inductive Loop Coils and the Induced Voltage for Position Detection System. Electronics Letter 2024, 60. [CrossRef]
- Dou, F.; Dai, C.; Xie, Y. Filtering Algorithm and Direction Identification in Relative Position Estimation Based on Induction Loop-Cable. Journal of Central South University 2016, 23, 112–121. [CrossRef]


| Solution | Test Object | Cost | Complexity | Ease of Implementation | Accuracy | Flexibility |
|---|---|---|---|---|---|---|
| Traditional Hardware-based1 | actual requirements | high | high | low | low | low |
| Existing HIL-based2 | LIM | low | high | low | high | low |
| OCS | moderate | high | moderate | moderate | low | |
| TCS | moderate | low | low | high | low | |
| Proposed HIL Platform | MPSS | low | low | high | high | high |
| Parameter Item | Parameter Setting | |
|---|---|---|
| physical parameters | transmitting antennas | |
| induction loops | ||
| operating parameters | instantaneous speed mode | |
| instantaneous position mode | ||
| acceleration mode | ||
| Software Modules | LUT | Flip-Flop | Block RAM |
|---|---|---|---|
| Analogue position calculation | 1.19% | 0.08% | 0.41% |
| Calculation of PWM parameters | 1.48% | 0.21% | 0.58% |
| PWM signal generation | 0.43% | 0.15% | 0.78% |
| Communication | 3.73% | 1.73% | 1.38% |
| Totals | 6.83% | 2.17% | 3.15% |
| Speed | Average Error | |
| Positioning(mm) | Speed Measurement(km/h) | |
| 50 km/h | 1.47 | 1.07 |
| 200 km/h | 1.92 | 3.19 |
| 600 km/h | 2.58 | 6.34 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



