Submitted:
08 February 2025
Posted:
10 February 2025
You are already at the latest version
Abstract
As a class of Synthetic Aperture Radar Ground Moving Target Indication (SAR-GMTI) methods, Robust Principal Component Analysis (RPCA)-based techniques consistently face the challenge of high correlation coefficients among channels, which will degrade the detection performance. Furthermore, the traditional RPCA-based methods always overlook the impact of azimuth velocity of moving targets, which has certain limitations for practical applications. To address these issues, this paper proposes a novel method, combining the generalized scale fourier transform with RPCA. First, it derives the signal model with introducing the azimuth velocity and proposes a generalized scale kernel function to achieve the decouple the envelope delay from the phase difference. It not only reduces the correlation coefficient effectively, but also achieves the precise estimation of the azimuth velocity through two-dimensional focusing associated with Doppler parameter in transform domain, while improving the method’s detection performance under low signal-to-noise ratio. Second, it derives the compensation processing of inter-channel signals to ensure compatibility with RPCA method and develops the correspond optimized criterion to achieve the detection of moving targets from the separate clutter. Finally, the simulated and measured data are provided to validate the effectiveness and correctness of the proposed method.
Keywords:
Robust principal component analysis (RPCA) method
; Ground moving target indication (GMTI)
; Synthetic aperture radar (SAR)
; Time-frequency analysis
1. Introduction
Synthetic Aperture Radar (SAR) systems [1] are widely utilized in various applications, including traffic control and battlefield surveillance. Ground Moving Target Indication (GMTI) is a significant concern in many SAR applications [2,3]. Typically, detecting moving targets directly in a SAR image is challenging due to the strong clutter background. Therefore, clutter suppression is crucial for robust moving target detection [4,5].
Clutter suppression techniques have been attracted many attentions recently, and many effective approaches have been performed, such as displaced phase center antenna (DPCA) [6] and along-track interferometry (ATI) approaches [7]. However, these two approaches are limited by registration precision among channels. In [8,9], space-time adaptive processing (STAP) method is proposed such that the disadvantage of the traditional SAR-based GMTI method could be removed. However, the STAP method requires high computational level and a large amount of target-free homogeneous secondary data, which could not always be obtained easily in practice. To alleviate the required number of samples and computational burden, reduced dimension and rank methods are presented in [10,11,12]. Unfortunately, the performance of clutter suppression also decreases. Meanwhile, a direct data domain-based least-squares approach (D3LS) is performed in [13], which requires only one sample number but causes corresponding aperture loss. To address the shortcomings of D3LS, an STAP based on compressive sensing (CS) method [14] is presented, which also only requires the data of one cell. However, the required user setting parameters in the CS algorithm are not easy to obtain in practice, and computational complexity is high. Afterwards, author proposed Reduced Dimension Compressed sensing (RD-CS) [15] to reduce the computational complexity of the CS method, but the problem of the required user setting parameters is still unresolved. Therefore, a fast algorithm for the solving sparse data is urgently needed. Low-rank matrix recovery (LRMR) [16,17], a generalization of CS, can take the rank of a matrix as a sparse measurement in two-dimensional matrix. The robust principal component analysis (RPCA) approach [18,19] is a variant of LRMR, which can separate an approximate low-rank matrix into the low-rank component and the strong sparse component. In [20,21], RPCA methods are used to suppress narrowband radio frequency interference (RFI) and to separate extended targets in the scenarios of interest for passive SAR, respectively. These works prove the applicability of RPCA methods in the field of radar. In [22,23], the authors proposed a ground moving target detection method combining pulse pressure data with RPCA method. However, in the face of strong noise, the background echo does not always meet the low-rank characteristics, resulting in the leakage of target energy into the clutter background. In [24], the author reconstructed the approximate low-rank matrix by using the azimuth sub-aperture to ensure the superior low-rank characteristics of structured data, but the result is not satisfactory because of only the amplitude information is used. In practice, since the movement of the target between different channels is existence, the moving targets will show obvious phase difference, which also makes the use of phase information possible. However, the velocity of moving target only can cause a small phase difference between channels, which is insensitive to correlation coefficient. So it will lead to high correlation coefficient and cannot be directly applied to RPCA method. In addition, the phase information is also easily destroyed by the soft threshold operator [24], which makes it impossible to estimate the velocity of the moving target. For this reason, [25] has made improvements, which can achieve accurate estimation of radial velocity, but still cannot obtain azimuth velocity.
To handle the above problems, a moving target detection method combing the generalized scaled Fourier transform (GSCFT) and RPCA is proposed in this paper. Here, the main contributions or innovations of this paper are as follows:
1) Proposed the idea of phase to envelope conversion. Similar to the positional deviation between moving targets and clutters at the same location after imaging. The motion characteristics of moving targets can also be reflected between different channels and form positional deviations in the time-frequency transform domain, thereby reducing the correlation coefficient between channels.
2) Do not ignore the impact of azimuth velocity and introduce it into echo model. Deriving GSCFT based on the idea of phase to envelope conversion within the introduction of the phase term caused by azimuth velocity, while associating it with position parameters to achieve accurate estimation of the velocity component.
3) Intentional two-dimensional focus processing. Compared with the lines formed by other one-dimensional focusing methods, the deliberately created two-dimensional focus is not only sparser in the plane of time-frequency transform domain for the subsequent RPCA process but also can further improve the SNR of moving target points, thus enhancing its detection performance under low SNR.
The remainder of this paper is organized as follows. In Section 2, we give the SAR-GMTI geometry, descripting the signal model and the existing problem. In Section 3, a moving target detection method based on GSCFT-RPCA is proposed. Next, the experiments verification is performed in Section 4. Finally, summations of the whole paper are provided in Section 5.
2. Signal Model and Problem Description
Figure 1 gives the geometry of multi-channel SAR system, in which consist of channels and their interval is . The first channel is used to transmit signal while all channels receive echo. The airplane flies with velocity at height . Define the velocity of the moving target is that is consist of the radial velocity and azimuth velocity . Then, the distance between channel and the moving target with slow time can be written as follow:
where denotes the instant distance when the radar boresight is directed to the target. Assuming that the radar transmits liner frequency modulation signal, then the echo received by channel can be formulated as follows:
where denotes the fast time and denotes the light speed. denotes the complex reflectivity for the moving target. is the range envelope after range pulse compression, while corresponds the azimuth envelope before azimuth compression. Usually, there exist many moving targets, so the Formula (2) can be rewritten as
It is easy to that Formula (3) is essentially a linear combination of each scattering point echo. For the convenience of subsequent analysis, we set . Then, we can get the following expression:
For the signal model shown in Formula (4), the current RPCA-based moving target detection methods [30] are usually considered that the (i.e., the symbol “”denotes much smaller than) and is approximated as . This assumption ignores the influence of on the envelope and phase. However, how should we handle when can not be ignored? How can we estimate this velocity? These issues have not been resolved in the above methods and are also challenges to be focused in this paper. In addition, the another issue of the current RPCA-based moving target detection methods is the high correlation coefficient. In RPCA-based SAR-GMIT processing, the following phase compensation function on the azimuth Doppler domain
which is adopted to achieve the inter-channel calibration. And then, the Formula (4) can be rewritten as
It is easy to see from Formula (6) that there only exists a phase difference between channels caused by . However, the correlation coefficient of moving target (i.e., the definition see [23]) is essentially determined by the above phase difference and is considered to be insensitive to this phase difference in current RPCA-based methods because of the much lower than . At this case, the correlation coefficient may appear the phenomenon of too high, which is not conducive to the parameter extraction from the sparse dictionary composed by moving targets according to Restricted Isometry Property (RIP) criteria [26]. So, how should we handle when the correlation coefficient is too high? This issue is also commonly overlooked in current RPCA-based moving target detection methods.
3. The Proposed Moving Target Detection Method Based on GSCFT-RPCA
In previous section, it summarizes the current existence of several issues to be solved. To address them, we first rederived the Formula (4) with introducing the variable and proposed a novel idea to reduce the correlation coefficient by using phase difference and envelope delay conversion. Based on this approach, we then improve the RPCA method—GSCFT-RPCA to simultaneously achieve robust moving target detection and the accurate estimation of . Specifically, as follows.
3.1. Generalized Scale Fourier Transform for Decreasing Correlation Coefficient
It is well known that phase is related to wavelength, whereas envelope corresponds to distance. When the phase is less than , its impact on the correlation coefficient may be minimal. In contract, the mismatch may occur if the phase converts to the envelope, and then the correlation characteristic will decrease among channels. So, based on this, we main research the conversion way, providing a detailed analysis of its characteristics and advantages in this subsection. Regarding the LFM signal model shown in Formula (4), we here simplify its representation to facilitate subsequent derivation as follow
where , and denote the delay-time, the carrier frequency and chirp rate, respectively. The amplitude of the signal is represented as . First, we define a generalized scale correlation kernel function as follow
where and denote the conjugation operation and lag-time, respectively. The parameter , , , are undetermined. From the Formula (8), we can see that the conversion way always faces the coupling term (i.e., the term contains t and simultaneously), such as a typical Wigner-Ville distribution (WVD) kernel function:
where the existing coupling term will produce pseudo peaks and increase the false alarm probability. So, selecting these parameters is crucial. For this, we build a critical as follow
where denotes the integer. Interestingly, the Formula (10) has infinitely many solutions. So, we hope to obtain a minimum value of these parameters, and then the solution can be chosen as follows:
and the auto-terms after modified correlation kernel function is written as follow:
In this case, the coupling term is eliminated and the maximum order is only second-order. Therefore, it can be seen that the modified conversion has more advantages, decreasing the false alarm probability caused by the pseudo peaks.
Additionally, the selection in Formula (11) also implies another layer of purpose, that is, the possibility of parameter for and . This is also specifically designed for the subsequent estimation for . Consequently, we further analyze and derive the two dimensional focusing process. First, the along -dimensional can be obtained by integrating
Second, rotation angle satisfies the condition: , the fractional Fourier transform is utilized to focus the -dimensional as follow
where denotes the Dirac-Delta function and . Obviously, the signal is focused on the point, where the two-dimensional coordinates correspond to and , respectively.
Of course, the echo usually consists of several signal components, and the cross-terms between them are also needed to consider. Here, we take two signal components as examples and derive their expressions as follow:
where and are the chirp rate and carrier frequency of , respectively. It is easy to see that these cross-terms cannot be focused on generating pseudo peaks due to the migration caused by and . So, the cross-terms formed through the parameters selected in the formula (10) will not affect the detection of auto-terms. In summary, the generalized scale fourier transform not only effectively realizes the conversion of phase and envelope, but also minimizes the influence of cross-term and coupling term to the greatest extent, laying a theoretical model for subsequent parameter extraction process.
3.2. Simultaneously Detect Moving Target and Estimate Azimuth Velocity Based on Improved RPCA
Based on the conversion model proposed in previous subsection, this subsection mainly considers two issues: I. Derive the compensation processing of inter-channel signals to ensure compatibility with the conversion model under the conditions of approximate failure; II. Under the premise of converting phase difference to envelope delay, how can the RPCA framework be introduced to develop an optimized model for moving target detection? To this end, we will provide a detailed discussion of the proposed GSCFT-RPCA method below.
First, the Formula (4) is used here as the initial signal because of and it can be find that is mostly contained in the coefficient term of the slow time . Therefore, we consider the technical idea of unified compensation in the doppler domain. Substituting the stationary phase into the Fourier transform integral, the signal in range-doppler domain can be written as
where the Formula (16) contains two phase terms related to and , and the final phase term corresponds to the phase difference between channels. So, we construct a compensation function as:
Then, the Formula (17) can be rewritten as
where and . For the Formula (18), we must have a clear understanding that the effect of the moving characteristics caused by does not affect the fast time (i.e., not consider the intra-pulse movement), but is closely related to the slow time . So, we need to obtain the relationship between and . In addition, another noteworthy issue here is that a single range cell may not contain all moving target information in practice. However, due to the extension of range frequency domain for all targets is the same, we can extract a range frequency cell, such as , which should contain information of all targets. Based on above analysis, we transform the Formula (18) into range frequency-slow time domain by principle of stationary phase as follow
It is easy to that the expression of the Formula (19) is similar to the Formula (6). So far, we finish the derivation of the compensation processing and ensure compatibility with the conversion model under the conditions of approximate failure. Then, substituting the Formula (19) into the Formulas (8)–(14), we can get the signal expression in the doppler chirp rate-transform domain as follow
Then, the azimuth velocity can be easily estimated with the focused coordinate along direction and is written as
where denotes the doppler chirp rate.
Based on above pre-processing, the next task is to introducing the RPCA framework. However, why the GSCFT is paired with RPCA framework? In theory, the RPCA framework require the input data to meet the sparsity and low-rank conditions. Upon careful examination of the GSCFT transform domain representation shown in formula 20, it can be concluded that the moving target is presented as a focus-point within the two-dimensional transform domain plane. In practice, the number of moving targets in the observation scene is usually limited, so the moving targets will exhibit obvious sparsity in the transform domain plane. Meanwhile, the clutter images are typically considered low-rank. Therefore, the input data after GSCFT processing meets the application conditions of RPCA framework. Here, we first observe the transform domain design part in Figure 2, in which the low-rank and sparse characteristics between moving targets and clutter points have been reflected in the doppler chirp rate-transform domain. However, it only corresponds to one channel. For improving the low-rank and sparse characteristics, all receive channel need to be utilized. So, we vectorize the two dimensional plane corresponding to the formula (20) and then stack all receive channel data as a matrix as follow
where denotes the vectorization operator. In this case, the received signal can be reformulated as
where denotes the received data of the background clutter while is the received data matrix of the moving targets. is the sampling number of the slow time. Then, the issue to extract the moving targets under the clutter backgrounds can be summarized as a following optimization criterion:
where and denote the rank and -norm, respectively. However, due to the formula (24) is an NP-hard problem, the terms of and need to be relaxed. Here, we utilize the and to replace them. So, a convex relaxation expression of the original problem can be written as follow
where (i.e., ) is penalty factor, denotes the -norm and the nuclear-norm is denoted as . Here, the formula (24) can be solved by the augmented Lagrange multiplier (ALM) [27,28,29]. Finally, the column of and is extracted and rearranged in matrix form, which represents the moving target data and clutter data, respectively. Additionally, the computational complexity of the proposed method mainly includes two parts: two-dimensional focusing processing and RPCA processing. Among them, RPCA processing includes the solution of kernel norm and 0-norm, and their computational complexity mainly lies in the singular value decomposition. Considering the data matrix and the rank of low-rank matrix is , then the computational complexity of singular value decomposition is . Meanwhile, the two-dimensional focusing processing is essentially a two-dimensional Fourier transform processing, which can usually be implemented using fast Fourier transform. So, its computational complexity is . Then, the total computational complexity of the proposed method is .
Summarizing the proposed moving target method, it addresses three issues compared to traditional RPCA-based method: I. the issue of high correlation coefficient, the proposed method give a novel idea by converting phase difference and envelope delay; II. the issue of ignoring azimuth velocity, the proposed method considers its influence and derive the compensation processing; III. the issue of estimating azimuth velocity, the proposed method utilizes the focused coordinate to reverse its value. Therefore, the proposed method has strong innovation in theoretically. Meanwhile, in order to facilitate a clear understanding of the processing flow and advantages, the flowchart of the proposed method and compared methods is shown in Figure 2, in which the red text corresponds to the modifications made by the proposed method.
4. Simulations and Results
In this section, we compare the proposed method with the traditional RPCA-based moving target detection method and verify the effectiveness of the proposed method using both simulated and measured data. Therefore, we divide the analysis into two parts: I. Theoretical feasibility analysis is performed to validate the azimuth velocity estimation and moving target detection using simulated data; II. Practical adaptability analysis is performed to validate whether the proposed method is applicable to real scenarios using measured data. Specifically, as follows.
4.1. Simulation Experiments
To investigate the target detection of the proposed method, we assume that the scene of interest contains 7 static clutter points and 2 moving targets, as shown in Figure 3, in which the static clutter points and moving targets are represented by squares and asterisks, respectively. The system parameters for the simulation experiment are shown in Table 1 and the radial velocities of the two moving targets are set to -2.784 m/s and 2.980 m/s, while the azimuth velocities are set to 4.446 m/s and 12 m/s, respectively.
According to the framework flow shown in Figure 2, we first give the pre-processing transform domain used by the proposed method and the comparison methods and then analyze their correlation coefficient results in Figure 4. Figure 4 (a) shows the results of the traditional RPCA method, in which it utilizes the range-doppler domain as the transform domain directly, this is, it does not perform the conversion between phase and envelope. Therefore, it is easy to see that the correlation coefficient is approximately equal to 1 between arbitrarily two channels. To improve on this, the proposed method and WVD-RPCA method reset their transform domain, namely the slow time-doppler domain and doppler chirp rate-transform domain as shown in Figure 4 (c), (e). Then, the correlation coefficients of the moving targets shown in Figure 4 (d), (f) appear a marked decline, which indicates the phase variation of the envelope transformation can decrease correlation coefficient of the moving targets effectively. Meanwhile, due to the correlation coefficient is closely related to the velocity of the moving targets, it can be seen from the Figure 4 (d), (f) that the correlation coefficient of target 1 is always higher than that of target 2. In addition, it is easy to see that the correlation coefficient outlines are different under these two methods. For WVD-RPCA method, due to the influence of data window length design, the data in the middle area is completely accumulated in WVD-RPCA method, resulting in a notch to form in the middle. For the proposed method, since the moving targets are focused in the doppler chirp rate-transform domain, its corresponding results become the peak in correlation coefficient image. However, it is worth noting that the resolution of the proposed method in the correlation coefficient image is higher, due to the two-dimensional focusing effect achieved by the proposed method compared to the one-dimensional focusing of WVD.
After analyzing the transform domain preprocessing, Figure 5 illustrates the effectiveness of different methods in separating moving targets from residual clutter points. Upon close examination of Figure 5(a), (b), it is evident that the traditional RPCA method suffers from a high correlation coefficient (shown in Figure 4 (b)), resulting in significant leakage of moving targets into the clutter separation images. However, this leakage is effectively suppressed in both the WVD-RPCA and the proposed methods. Figure 5 (c), (d) show that the WVD-RPCA method is affected by coupling terms, which prevents echo data from focusing in the slow-time Doppler domain, thereby failing to locate the peak positions of moving targets. Consequently, this method cannot accurately determine the velocity information of moving targets. Fortunately, the proposed method successfully generates target images where the coordinates of the two moving targets can be obtained through peak detection. By substituting these coordinates into Formula (21), we can obtain the estimated azimuth velocities of targets 1 and 2 as 4.501 m/s and 11.995 m/s, respectively. These estimates are closely aligned with the actual values.
Furthermore, we quantitatively evaluate their detection probabilities with the variation of signal-to-noise ratio (SNR) shown in Figure 6. Here, Figure 6 presents the comparison results with a false alarm rate of 10-6, showing that as SNR decreases, the detection performance of the three methods follows the order: the proposed method outperforms WVD-RPCA, and WVD-RPCA outperforms the traditional RPCA method. The reason for this phenomenon is evident: the key lies in the proposed method’s enhancement of the SNR. The proposed method can achieve two-dimensional accumulation, whereas WVD-RPCA has only one-dimensional accumulation capability, which makes the proposed method superior at lower SNR.
In conclusion, the proposed method is an efficient technique for detecting moving targets. It not only mitigates the issue of target leakage caused by high correlation coefficients, but also overcomes the limitations of current methods in accurately estimating azimuth velocities. Its performance is significantly superior to existing RPCA-based moving target detection methods.
4.2. Measured Data Verification
Through the above simulations, the correctness and feasible of the proposed method is verified. Here, we further analyze the practical adaptability of the proposed method by the measured data. The system parameters are follow: carrier frequency is 8.85GHz, bandwidth is 60MHz, pulse repetition frequency is 1000Hz and flight speed is 120m/s. Figure 7 presents a comparison of detection performance among traditional RPCA, WVD-RPCA and the proposed method. Figure 7 (a) shows the raw SAR image, containing a ground moving target marked with a red box, while Figure 7 (b), (c), (d) correspond the detection result of traditional RPCA, WVD-RPCA and the proposed method, respectively. First, it is easy to see that both traditional RPCA and WVD-RPCA do not achieve satisfactory separation results from Figure 7 (a), (b). From a theoretical perspective, the traditional RPCA method’s failure to achieve effective separation is not surprising due to inherent algorithmic limitations. However, the WVD-RPCA method also failed to effectively separate clutters from the moving targets. For this phenomenon, we believe this is due to the presence of many strong scatterers (such as the edges of dense buildings) in the scene, which results in many unresolved diagonal lines in Figure 7 (b), that is strong clutters overshadowing the ground moving target. In contrast, the target point is highlighted with two-dimensional accumulation of the proposed method, appearing an obvious focus peak point at (5.0, 23.68). But, some areas were still partially obscured by strong clutter in Figure 7 (d) due to the strong clutters. Then, the estimated azimuth velocity is about 0.68 m/s, aligning with the actual values. Overall, both simulation and real data validations demonstrate that the proposed method is an efficient and correct ground moving target detection method.
5. Conclusions
In this paper, an improved moving target detection method based on GSCFT-RPCA for SAR-GMTI system is proposed to solve many issues existed in current RPCA-based moving target detection methods. It not only effectively reduces the correlation coefficient through the conversion between phase difference and envelope delay, overcoming the leakage issue, but also improves the RPCA-based target detection method with introducing the azimuth velocity, achieving the detection of moving target and the estimation of azimuth velocity simultaneously. Finally, both simulated and measured data are utilized to verify the correctness and effectiveness of the proposed method through several comparative tests.
However, the current method also has its limitations, that is, it is only suitable for uniform motion. In the case of acceleration, the slant-distance history model is changed and the corresponding compensation processing will fail. Therefore, we will carry out further in-depth research on moving target detection with acceleration in the future research work.
Author Contributions
Conceptualization, G.T. and G.Y.; methodology, G.T. and G.Y; software and validation, Z. C. and Z.J.; investigation, X.C.; data curation, G. T.; writing—original draft preparation, G. T.; writing—review and editing, G.T. and G.Y.; supervision, L.G.; funding acquisition, G.Y.; All authors have read and agreed to the published version of the manuscript.”
Funding
This research was funded by the National Natural Science Foundation of China under Grant No. 62301438 and Grant No. 62301598, and the Fundamental Research Funds for the Central Universities under Grant G2023KY05109, and Natural Science Basic Research Program of Shaanxi under Grant No. 2023-JC-QN-0638).
Conflicts of Interest
The authors declare no conflicts of interest.
References
- H. Fan, L. Zhang, Z. Zhang, W. Yu, and Y. Deng. On the Processing of Gaofen-3 Spaceborne Dual-Channel Sliding Spot-light SAR Data. IEEE Transactions on Geoscience and Remote Sensing, vol. 60, pp. 5202912, 2022.
- Y. Wang, Q. Song, J. Wang, B. Du, and P. Wang, A Correction Method to Systematic Phase Drift of a High Resolution Radar for Foreign Object Debris Detection. Remote Sensing, vol. 14, no. 8, pp. 1787, 2022. [CrossRef]
- B. Djath, J. Schulz-Stellenfleth, and B. Cañadillas, Study of Coastal Effects Relevant for Offshore Wind Energy Using Spaceborne Synthetic Aperture Radar (SAR). Remote Sensing, vol. 14, no. 7, pp. 1688, 2022. [CrossRef]
- S. Zhang, Z. Jiang, J. Chen, S. Li, Y. Liu, R. Guo, M. Xing, An Effective Clutter Suppression Approach Based on Null-Space Technique for the Space-Borne Multichannel in Azimuth High-Resolution and Wide-Swath SAR System, IEEE Transactions on Geoscience and Remote Sensing, vol. 60, 2022. [CrossRef]
- Y. Guo, G. Liao, J. Li, T. Gu, A Clutter Suppression Method Based on NSS-RPCA in Heterogeneous Environments for SAR-GMTI, IEEE Transactions on Geoscience and Remote Sensing, vol. 58, no. 8, pp. 5880–6891, 2020. [CrossRef]
- D. Cerutti-Maori and I. Sikaneta, A generalization of DPCA processing for multichannel SAR/GMTI radars, IEEE Transactions on Geoscience and Remote Sensing, vol. 51, no. 1, pp. 560–572, Jan. 2013. [CrossRef]
- Budillon, V. Pascazio, and G. Schirinzi, Multichannel along-track interferometric SAR systems: Moving targets detection and velocity estimation, International Journal of Navigation Observation, vol. 2008, no. pp. 1–16, Feb. 2008.
- J. H. G. Ender, “Space-time processing for multichannel synthetic aperture radar,” Electronics and Communication Engineering Journal, vol. 11, no. 1, p. 29, 1999. [CrossRef]
- H. Jeon, Y. Chung, W. Chung, J. Kim, and H. Yang, Clutter covariance matrix estimation using weight vectors in knowledge-aided STAP, Electronics Letters, vol. 53, no. 8, pp. 560–562, April, 2017. [CrossRef]
- R. Klemm, Adaptive airborne MTI: an auxiliary channel approach. Communications Radar and Signal Processing, vol. 134, no. 3, pp. 269-276, 1987. [CrossRef]
- Xiang, D. Feng, H. Lv, J. He, H. Liu, Three-dimensional reduced-dimension transformation for MIMO radar space–time adaptive processing. Signal Processing, vol. 91, no. 8, pp. 2121-2126, 2011. [CrossRef]
- Y. Wang, J. Chen, Z. Bao, and Y. Peng, Robust space-time adaptive processing for airborne radar in nonhomogeneous clutter environments. IEEE Transactions on Aerospace and Electronic Systems , vol. 39, no. 1, pp. 70-81, Jan., 2003.
- T. K. Sarkar, H. Wang, S. Park, and J. Koh, A deterministic least-squares approach to space time adaptive processing (STAP). IEEE Transactions on Antennas and Propagation, vol. 49, no. 1, pp. 91-103, Jan. , 2001. [CrossRef]
- K. Sun, H. Meng, F. D. Lapierre, X. Wang, Direct data domain STAP using sparse representation of clutter spectrum. Signal Processing, vol. 91, no. 10, pp. 2268-2276, 2011. [CrossRef]
- J. Li, Y. Guo, G. Liao, Q. Guo, and J. Xi. Dimension Reduced Sparse Recovery Method for Clutter Suppression in Bistatic MIMO Radar. Radar conference, USA, pp. 1452-1455, 2015.
- J. Chen, J. Yang, “Robust subspace segmentation via low-rank representation,” IEEE Transactions on Cybernetics, vol. 44, no. 8, pp. 1432-1445, August, 2014. [CrossRef]
- M. Davenport, J.Romberg. An Overview of Low-Rank Matrix Recovery From Incomplete Observations, IEEE Journal of Selected Topics in Signal Processing, vol. 10, no. 4, pp. 608–622, 2016. [CrossRef]
- E. J. Candès, X. Li, Y. Ma, and J. Wright, Robust principal component analysis?, J. ACM, vol. 58, no. 3, pp. 1–37, May. 2011.
- Y. Gao, T. Lin, J. Pan, F. Nie, Youwei Xie Fuzzy Sparse Deviation Regularized Robust Principal Component Analysis, IEEE Transactions on Image Processing, vol. 31, pp. 5645–5660, 2022.
- Y. Huang, G. Liao, J. Li, J. Xu, Narrowband RFI Suppression for SAR System via Fast Implementation of Joint Sparsity and Low-Rank Property, IEEE Transactions on Geoscience and Remote Sensing , vol. 56, no. 5, pp. 2748-2761, 2018. [CrossRef]
- E. Mason, I. Son, and B. Yazıcı. Passive Synthetic Aperture Radar Imaging Using Low-Rank Matrix Recovery Methods, IEEE Journal of selected topics in signal processing, vol. 9, no 8, pp.1570-1582, Dec. 2015. [CrossRef]
- Y. Wang, T. Li, L. Chen, Y. Yu, Y. Zhao, J. Zhou, Tensor-Based Robust Principal Component Analysis With Locality Preserving Graph and Frontal Slice Sparsity for Hyperspectral Image Classification, IEEE Transactions on Geoscience and Remote Sensing, vol. 60, no. 5508319, 2022. [CrossRef]
- Yang, X. Yang, G. Liao, S. Zhu, Strong Clutter Suppression via RPCA in Multichannel SAR/GMTI System, IEEE Geoscience and Remote Sensing Letters, vol. 12, pp. 2257-2241, 2015. [CrossRef]
- J. Cai, E. J. Candès, and Z. Shen, A singular value thresholding algorithm for matrix completion, SIAM Journal on Optimization, vol. 20, no. 4, pp. 1956–1982, 2010. [CrossRef]
- Y. Guo, G. Liao, J. Li, and X. Chen. A Novel Moving Target Detection Method Based on RPCA for SAR Systems. IEEE Transactions on Geoscience and Remote Sensing, vol. 58, no. 9, pp. 6677-6690, 2020. [CrossRef]
- L. Donoho, M. Elad, and V. N. Temlyakov, Stable recovery of sparse overcomplete representations in the presence of noise, IEEE Transactions on Information Theory, vol. 52, no. 1, pp. 6-8, 2006.
- L. Zhouchen, C. Minming, and M. Yi, The augmented lagrange multiplier method for exact recovery of corrupted low-rank matrices, Eprint Arxiv, 2010.
- J.-F. Cai, E. J. Candès, and Z. Shen, A singular value thresholding algorithm for matrix completion, SIAM Journal on Optimization, vol. 20, no. 4, pp. 1956–1982, Jan. 2010.
- P. Giampouras, K. Themelis, A. Rontogiannis, et al. Simultaneously Sparse and Low-Rank Abundance Matrix Estimation for Hyperspectral Image Unmixing, IEEE Transactions on Geoence and Remote Sensing, vol. 54, no. 8, pp. 4775-4789, 2016.
- C. Kuptametee: N. Aunsri. An EMD with Masked WVDs for Cross-terms Reduction in Non-stationary Signals. 2022 Joint International Conference on Digital Arts, Media and Technology with ECTI Northern Section Conference on Electrical, Electronics, Computer and Telecommunications Engineering (ECTI DAMT & NCON). Chiang Rai, Thailand, January, 2022.
Figure 1.
the geometry of the typical multi-channel SAR system.
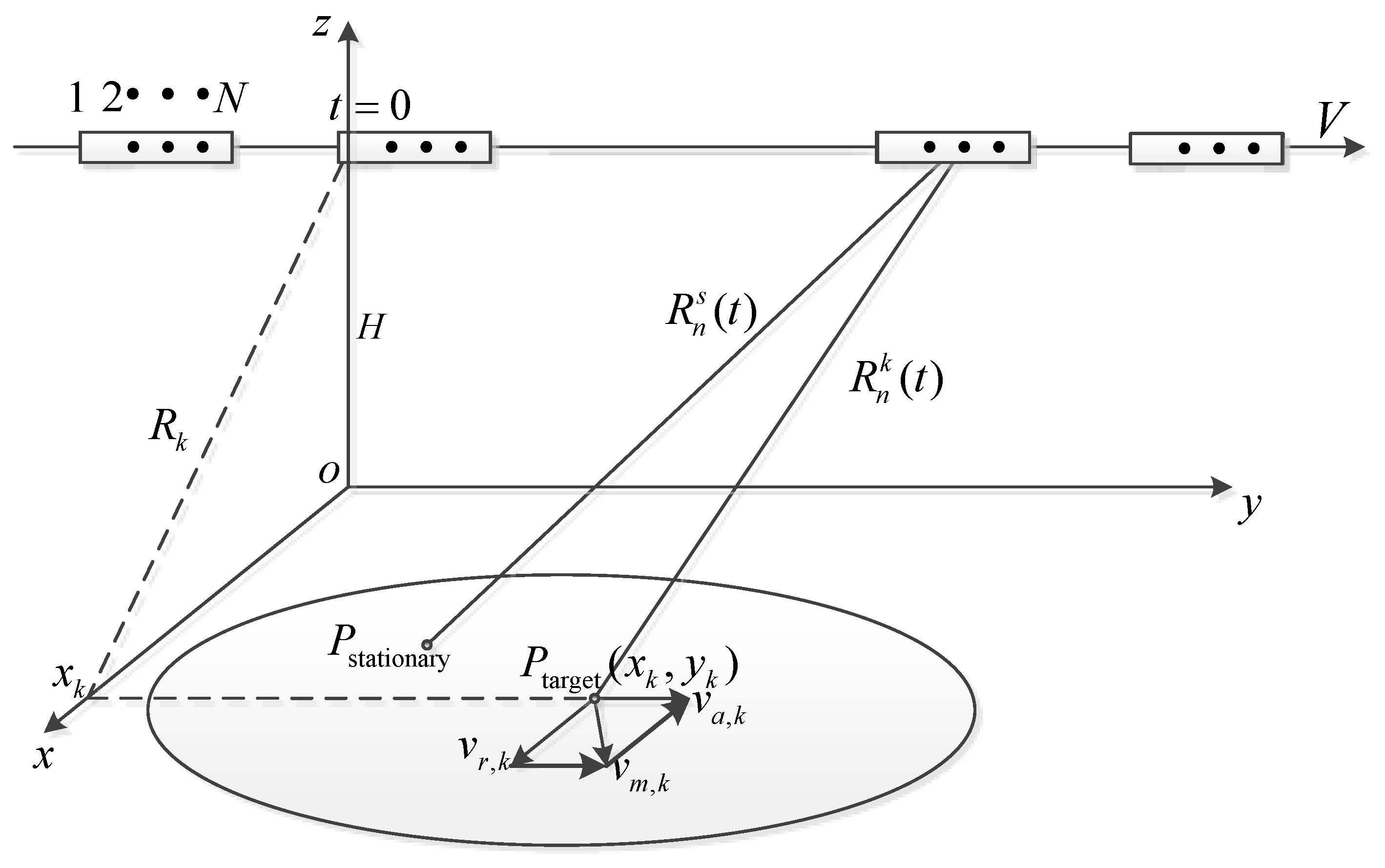
Figure 2.
Flowchart of the compare methods (Traditional RPCA, WVD-RPCA) and the proposed method.
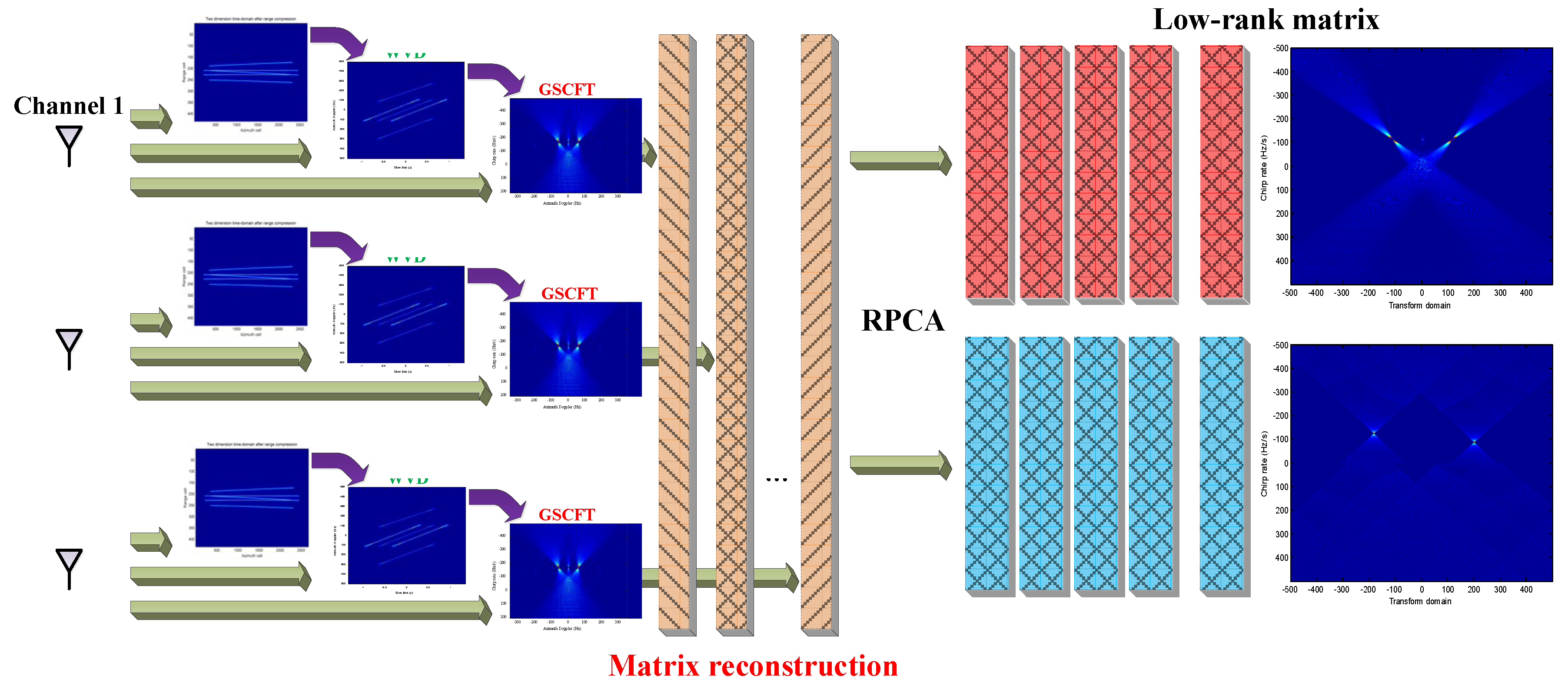
Figure 3.
The distribution of clutter points and moving targets.
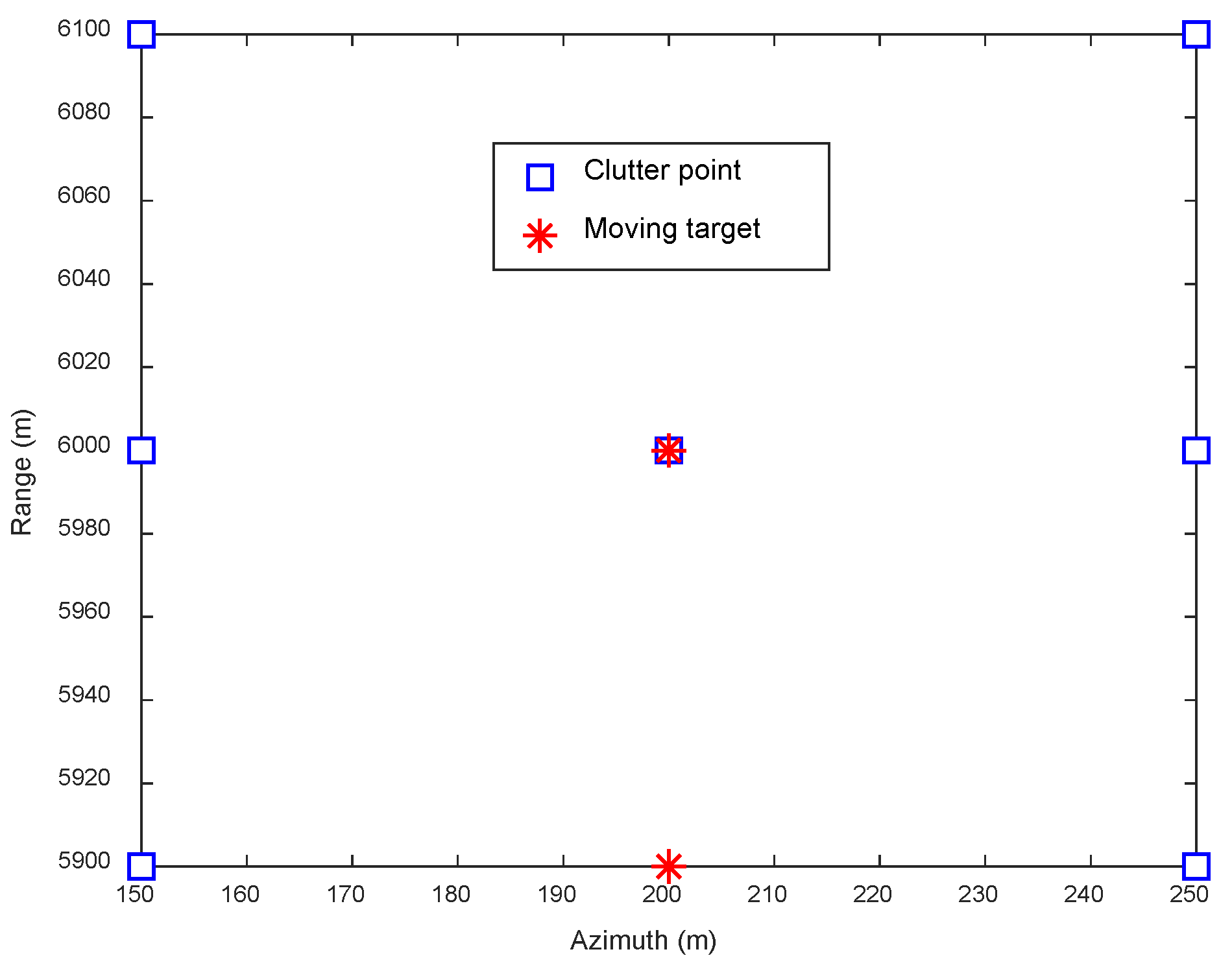
Figure 4.
The preprocess transform domain and correlation coefficient results obtained using the different methods: (a) The range-doppler domain using traditional RPCA-based method; (b) the correlation coefficient of traditional RPCA-based method; (c) the slow time-doppler frequency domain using WVD-RPCA method; (d) the correlation coefficient of WVD-RPCA method;(e) the doppler chirp rate-transform domain using the GSCFT -RPCA method; (f) the correlation coefficient of the proposed GSCFT-RPCA method.
Figure 4.
The preprocess transform domain and correlation coefficient results obtained using the different methods: (a) The range-doppler domain using traditional RPCA-based method; (b) the correlation coefficient of traditional RPCA-based method; (c) the slow time-doppler frequency domain using WVD-RPCA method; (d) the correlation coefficient of WVD-RPCA method;(e) the doppler chirp rate-transform domain using the GSCFT -RPCA method; (f) the correlation coefficient of the proposed GSCFT-RPCA method.
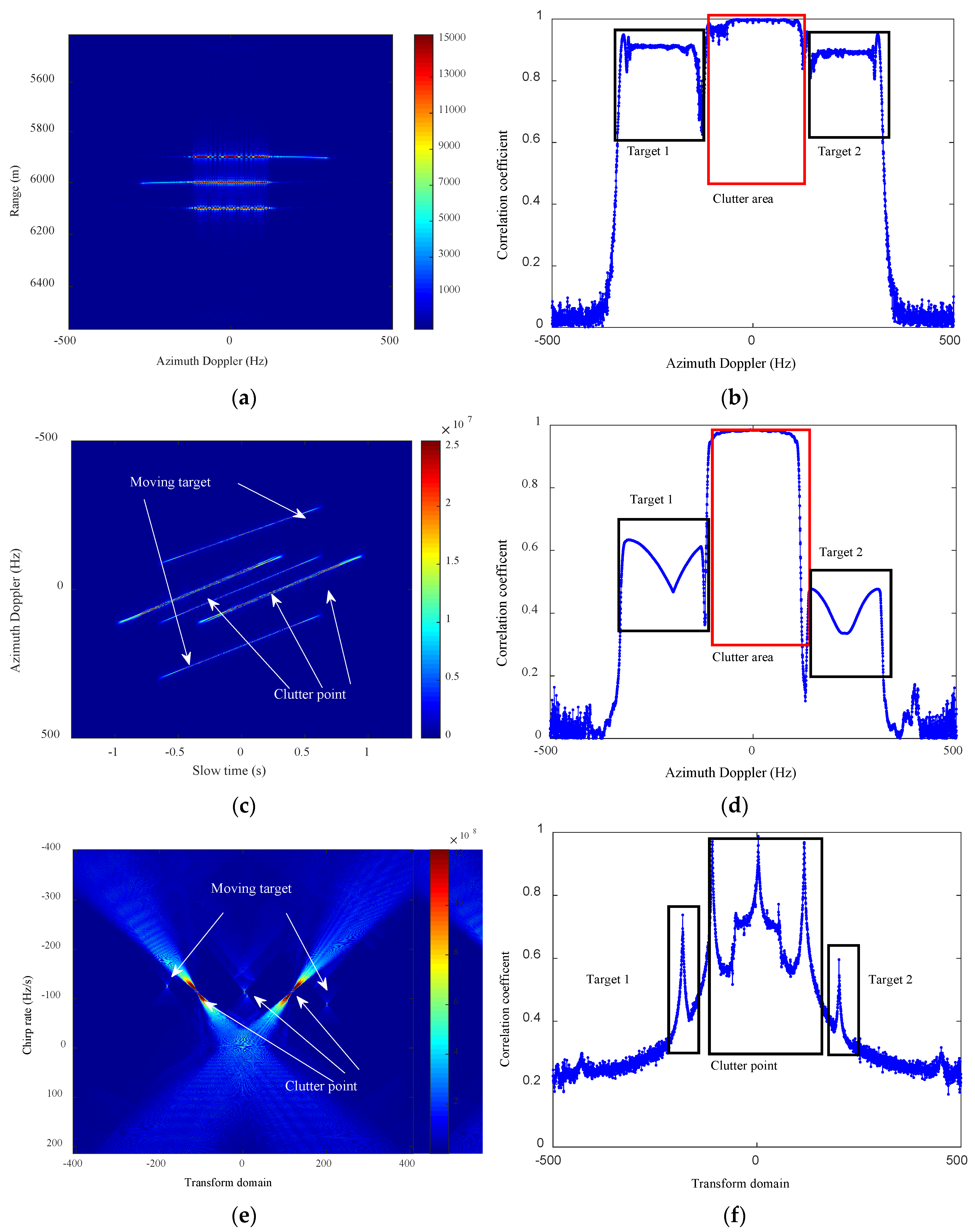
Figure 5.
Detection results of the different methods: (a) the detected clutter points by using the tradition RPCA method; (b) the detected moving targets in the tradition RPCA method; (c) the detected clutter points by using the WVD-RPCA method; (d) the detected moving targets in the WVD-RPCA method (e) the detected clutter points in the proposed method; (f) the detected moving targets in the proposed method.
Figure 5.
Detection results of the different methods: (a) the detected clutter points by using the tradition RPCA method; (b) the detected moving targets in the tradition RPCA method; (c) the detected clutter points by using the WVD-RPCA method; (d) the detected moving targets in the WVD-RPCA method (e) the detected clutter points in the proposed method; (f) the detected moving targets in the proposed method.
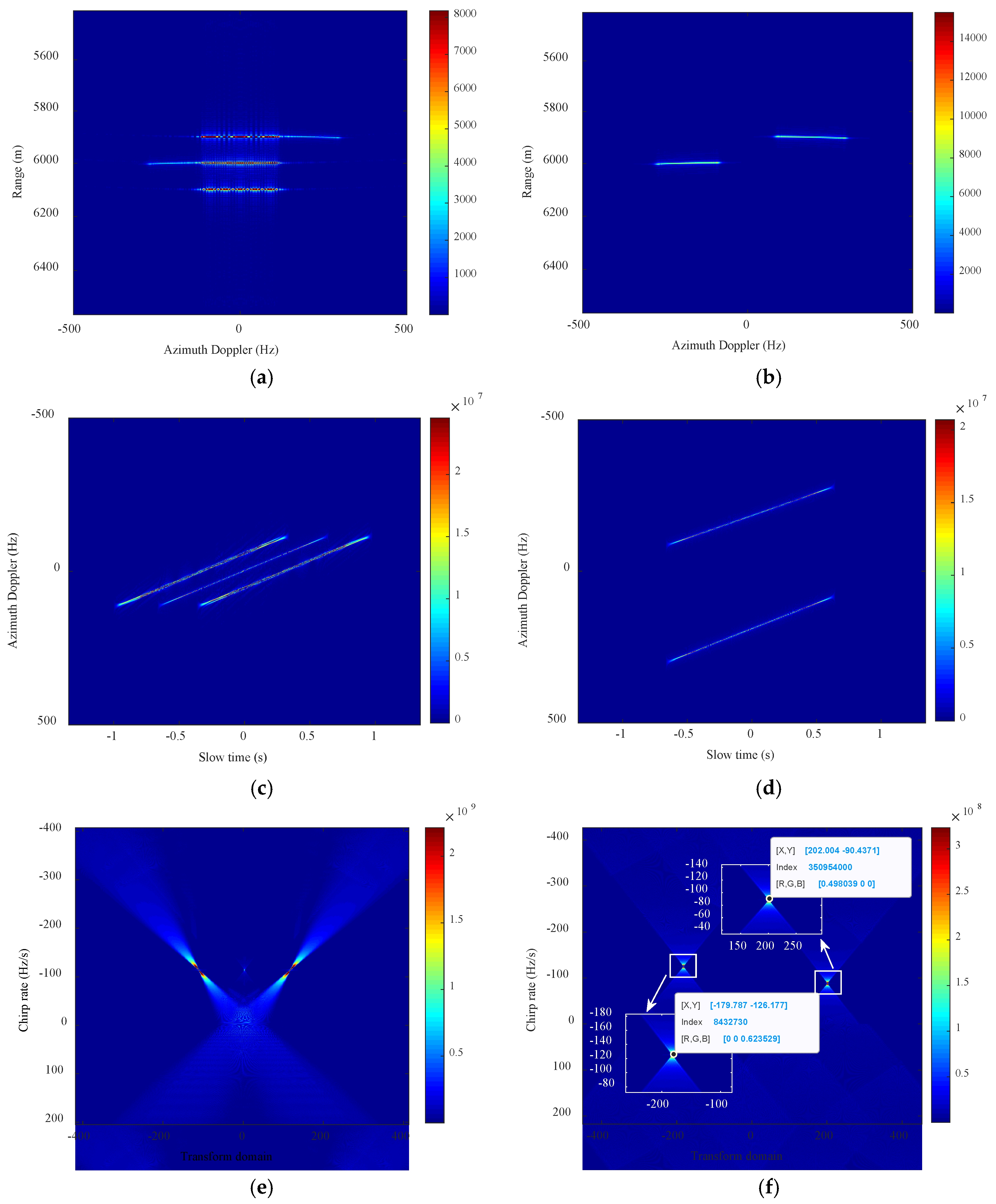
Figure 6.
the comparison of detection probabilities between proposed method and Traditional/WVD-RPCA method.
Figure 6.
the comparison of detection probabilities between proposed method and Traditional/WVD-RPCA method.
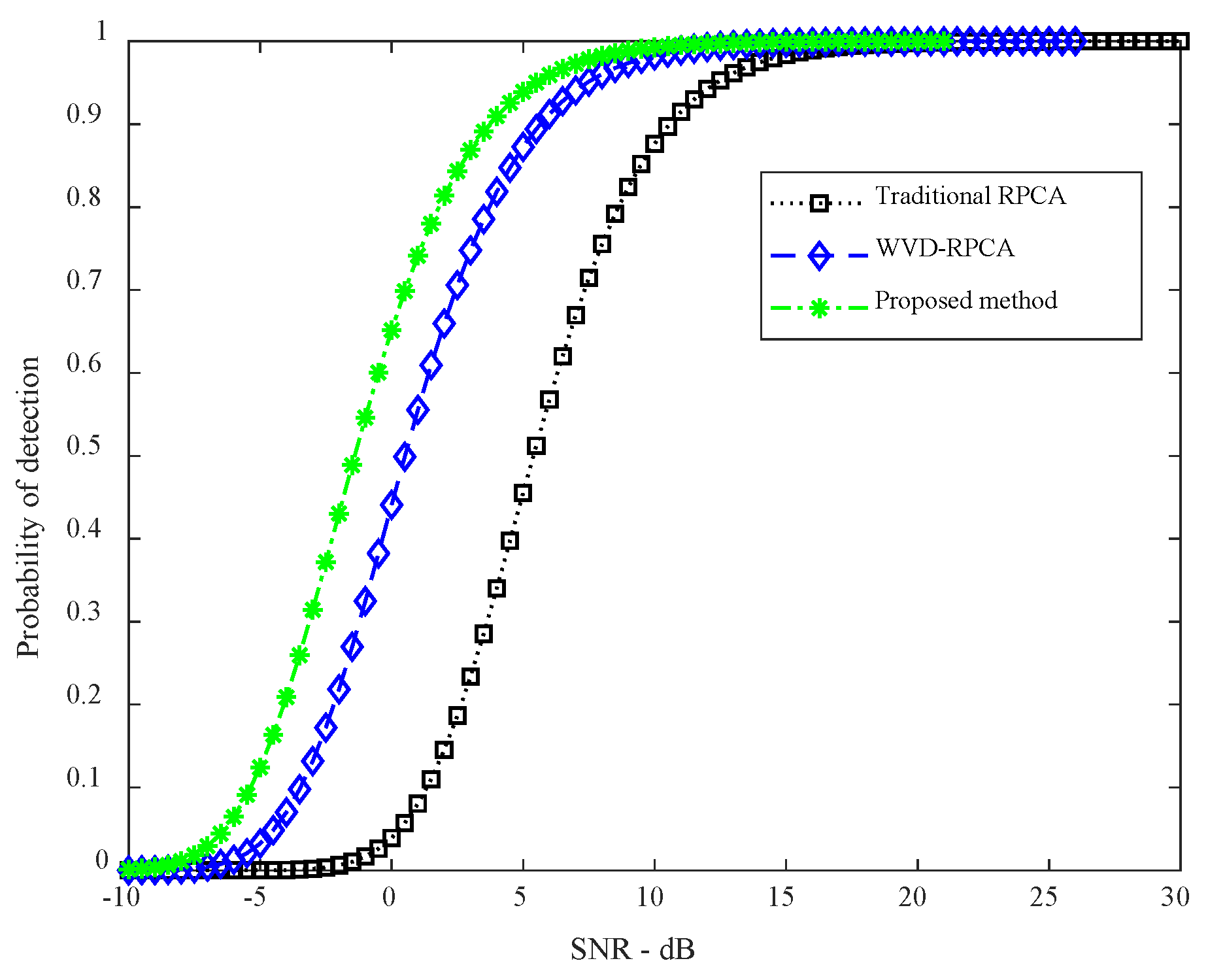
Figure 7.
Detection results of the proposed methods: (a) the raw SAR image, including a moving target; (b) the detected result of moving targets in traditional RPCA method; (c) the detected result of moving targets in WVD-RPCA method; (d) the detected result of moving targets in the proposed method.
Figure 7.
Detection results of the proposed methods: (a) the raw SAR image, including a moving target; (b) the detected result of moving targets in traditional RPCA method; (c) the detected result of moving targets in WVD-RPCA method; (d) the detected result of moving targets in the proposed method.
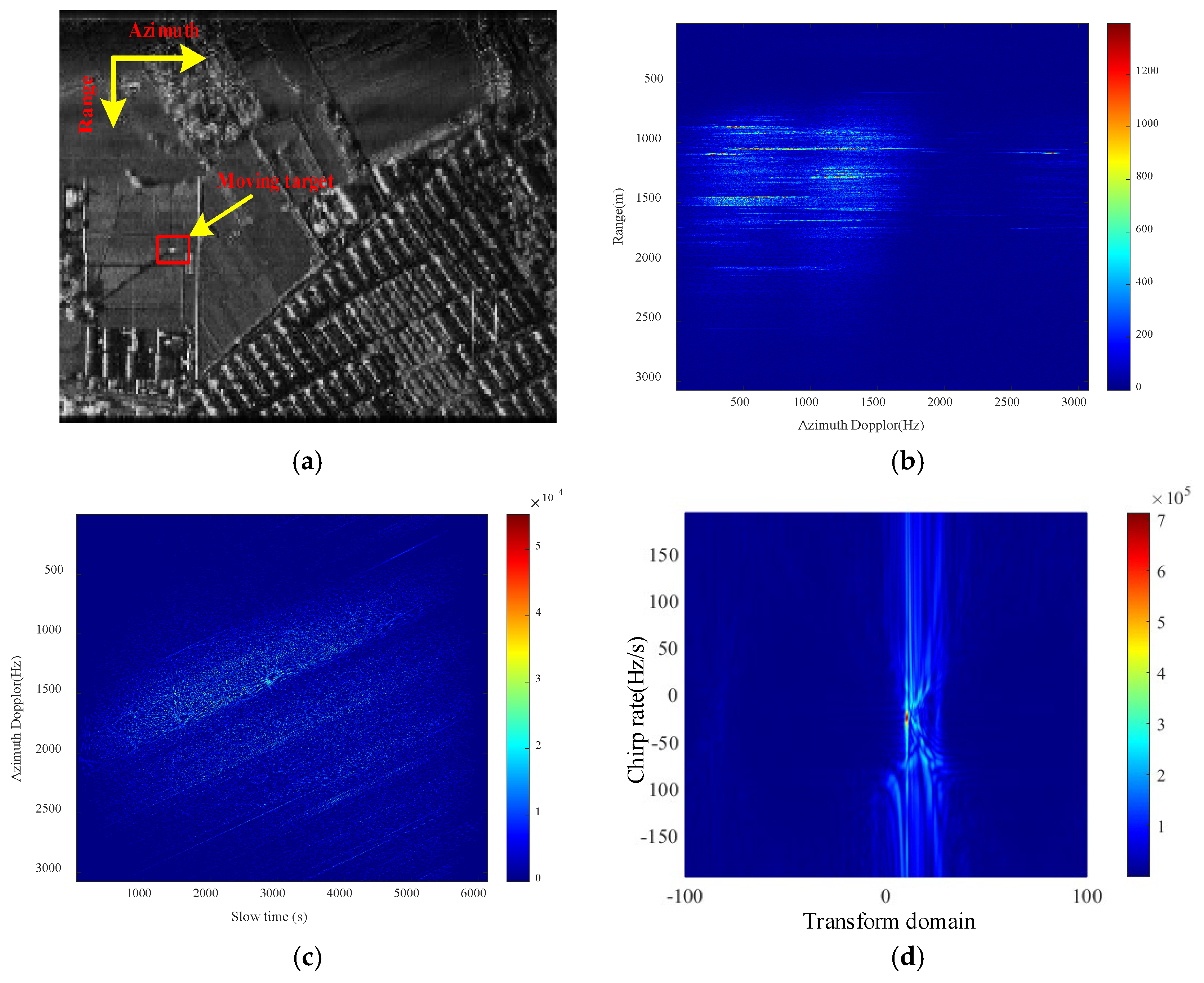

Table 1.
Simulation Parameters design.
| Parameter | Symbol | Value |
|---|---|---|
| Number of elemnts | N | 10 |
| Radar platform velocity | V | 100 m/s |
| Height of the radar platform | H | 2 km |
| Wavelength | 0.03 m | |
| Inter-element spacing | d | 0.6 m |
| Bandwidth | B | 100 MHz |
| Sampling frequency | 150 MHz | |
| Pulse repetition frequency | PRF | 1000 Hz |
| Signal to clutter ratio | SCR | -30dB |
| Signal to noise ratio | SNR | 10dB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



