Submitted:
30 January 2025
Posted:
30 January 2025
You are already at the latest version
Abstract
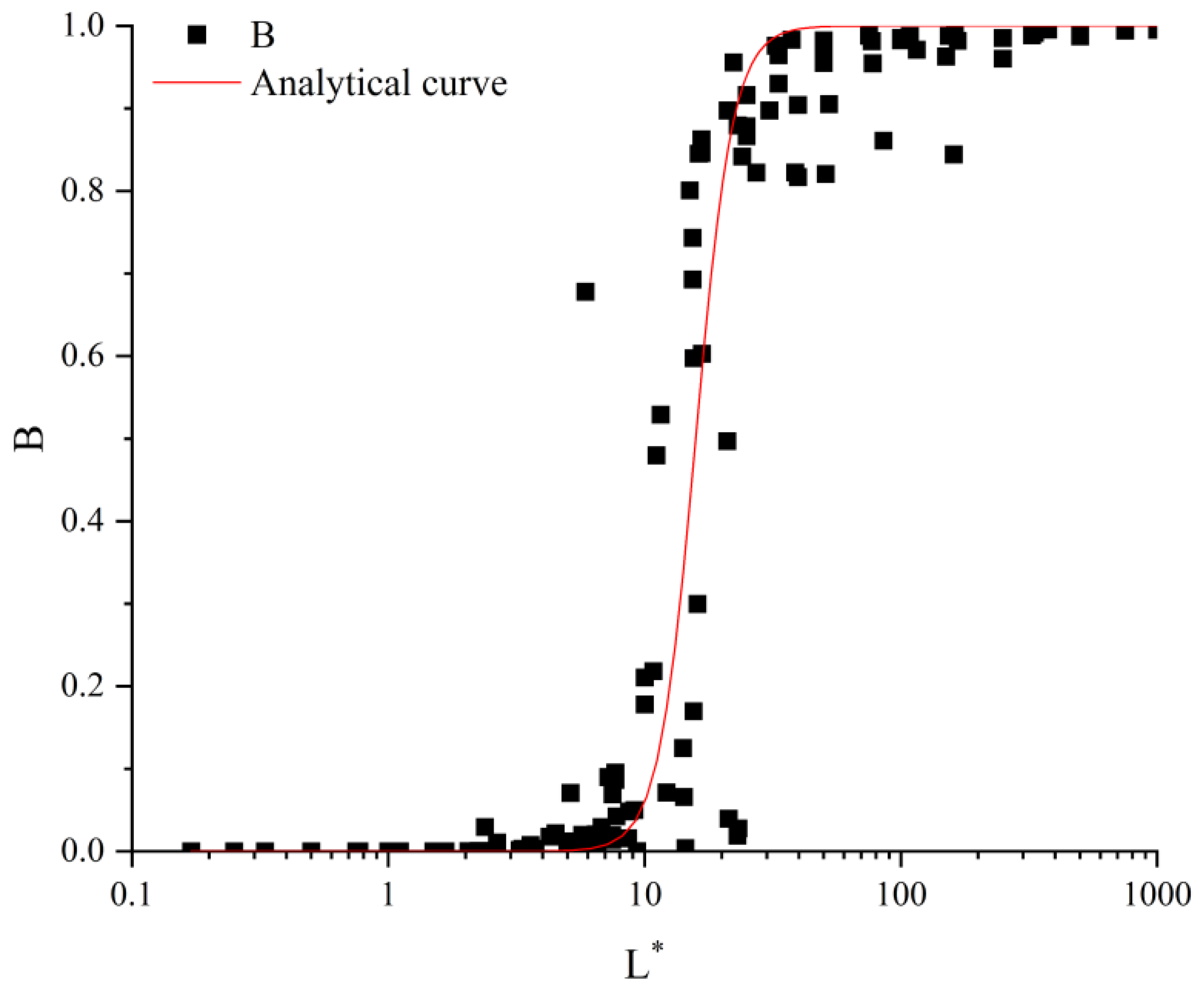
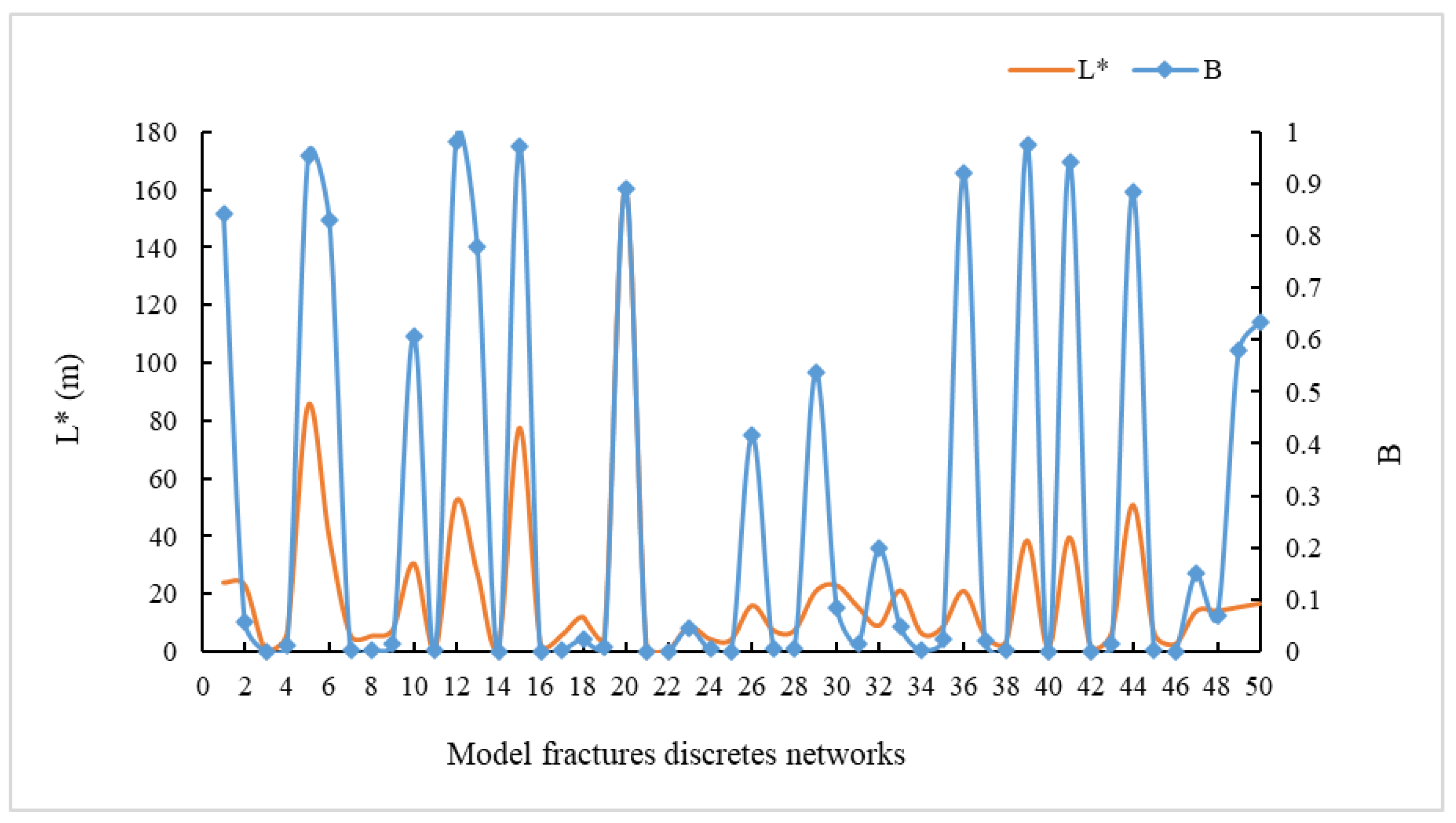
Understanding the blockiness of 3D fractured rocks with varying fracture persistence, spacing, and orientations is essential for comprehending rock mass behavior, particularly in engineering and geological applications. These factors significantly the mechanical behavior, stability, and blockiness of fragmented rock formations. This study aims to analyze the complex behavior of fractured rocks within blockiness fracturing setups using advanced numerical experiments. This study significantly enhances our understanding of how persistence and spacing affect fractured rock formation in three dimensions. Unlike previous studies, our work establishes a fundamental link between fracture geometry and blockiness using parameters of Discrete Fracture Networks (DFNs). Through meticulous analysis and advanced digital experiments, the GeneralBlock software was used to identify and discuss the key components of rupture systems, such as blockiness and representative elemental volume (REV). By establishing DFNs with different parameters, we discovered a fundamental link between fracture geometry and blockiness. The findings indicate that fractured rocks exhibit varied behaviors depending on the blockiness percentage and structural parameters. A higher fracture persistence, lower spacing, and larger angles, limited by the orientation of the fracture surfaces, result in higher L* values. When L* was less than 7.36, blockiness was below 1%. When L* ranges between 7.36 and 22.83, blockiness undergoes a sudden change ranging from 1% to 90%. When L* exceeds 22.83 and the blockiness surpasses 90%, it gradually stabilizes. These findings are crucial for a better understanding and prediction of the mechanical behavior, stability, and blockiness of fragmented rock formations, with significant implications for engineering and geological applications.
Keywords:
1. Introduction
2. Generation of Three-Dimensional Discrete Fractures
2.1. Generation of Three-Dimensional Discrete Fractures
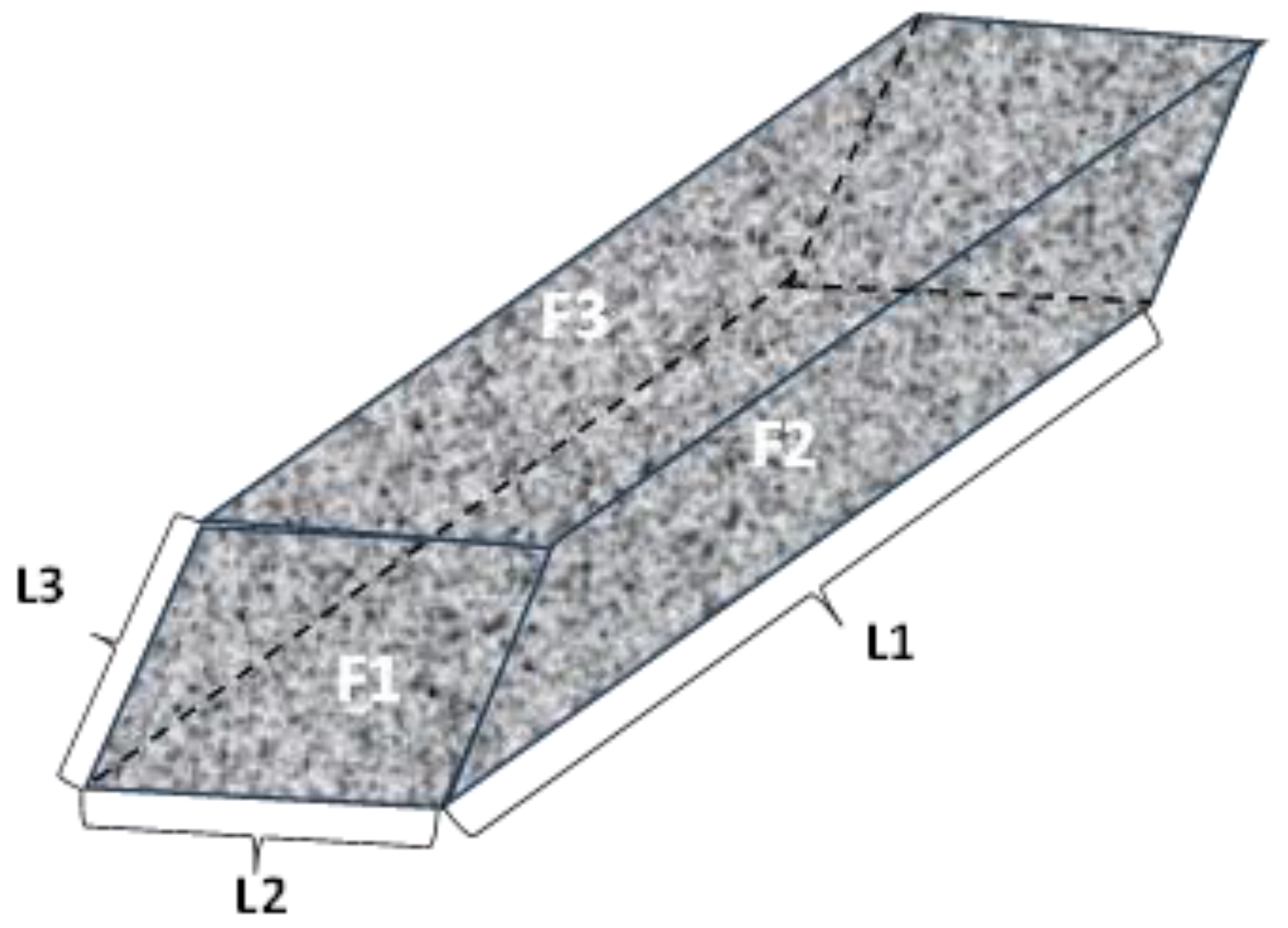
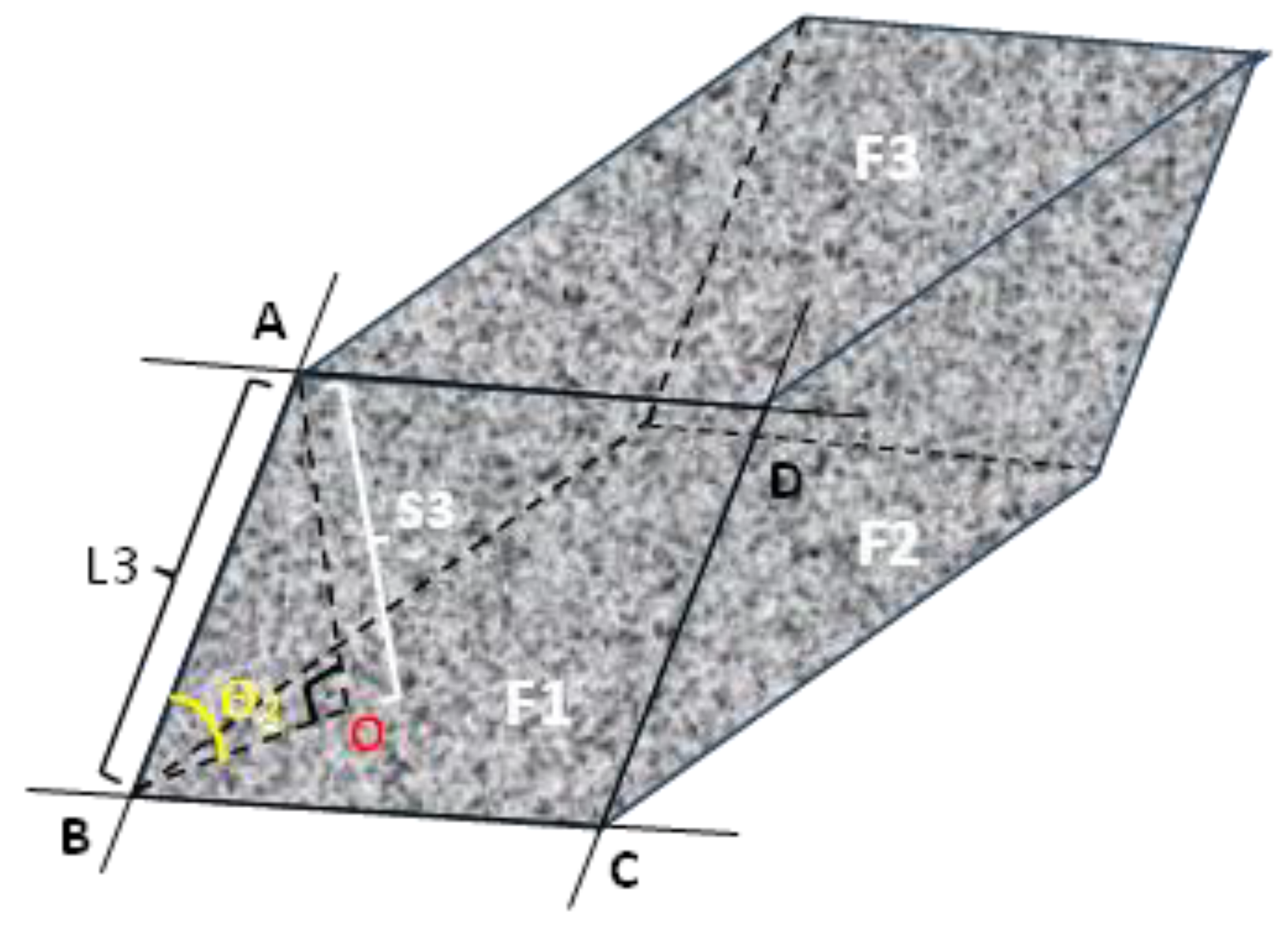
2.2.1. Fracture Geometry Parameters

2.2.2. Fracture Network Modelling
3. Blockiness Analysis and REV Size Estimation of Various Fractured Rocks
3.1. Blockiness of Fractured Rock Mass
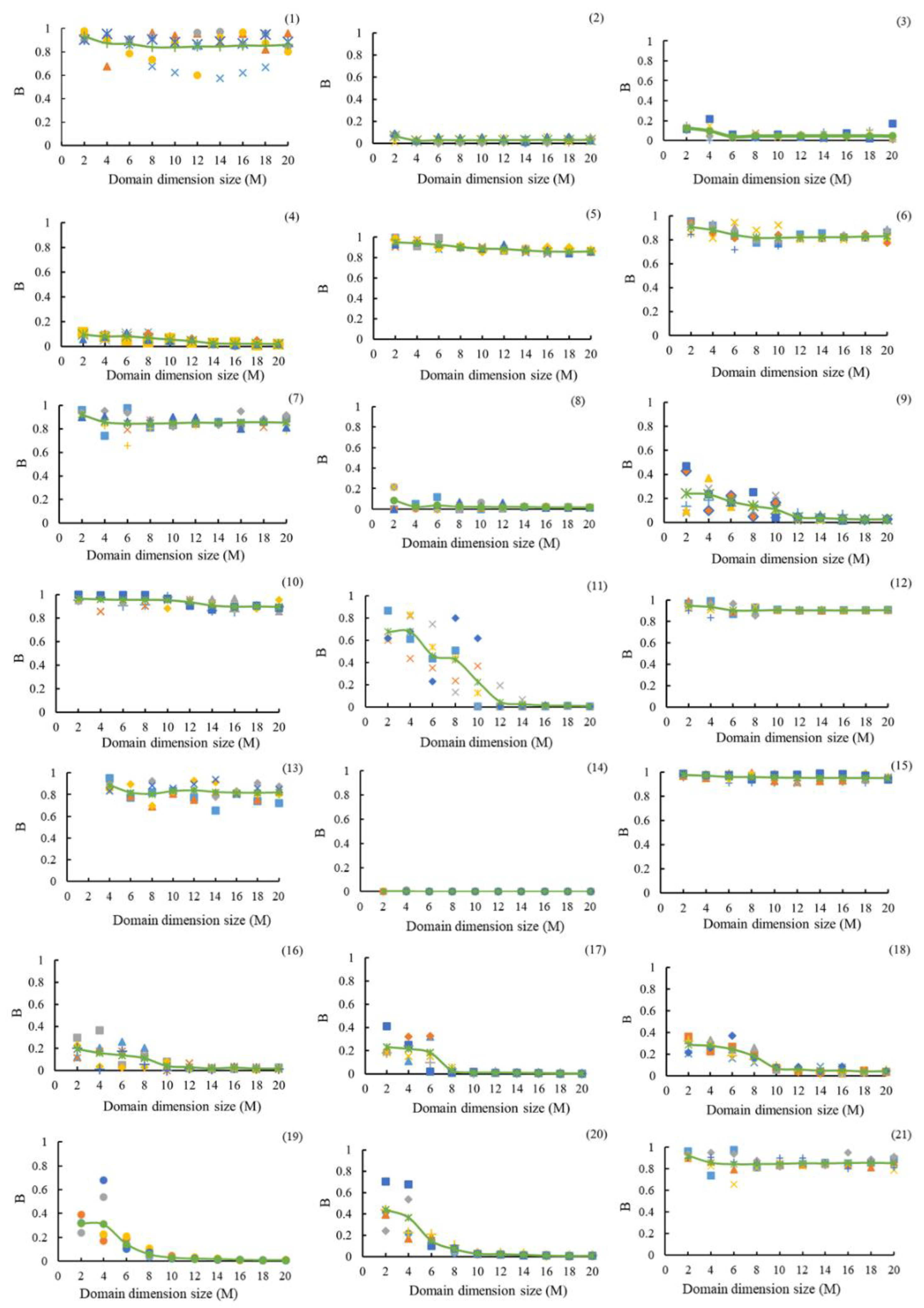
3.2. Estimation of the Blockiness and REV
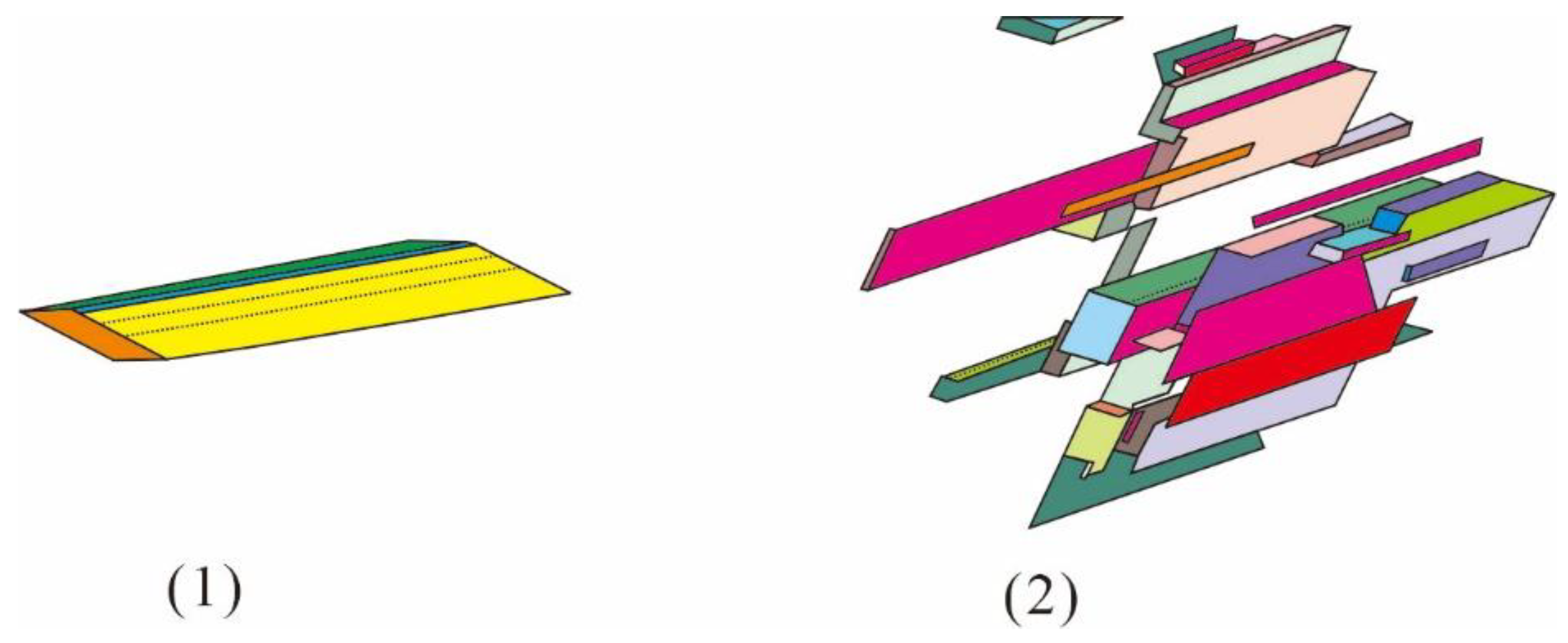
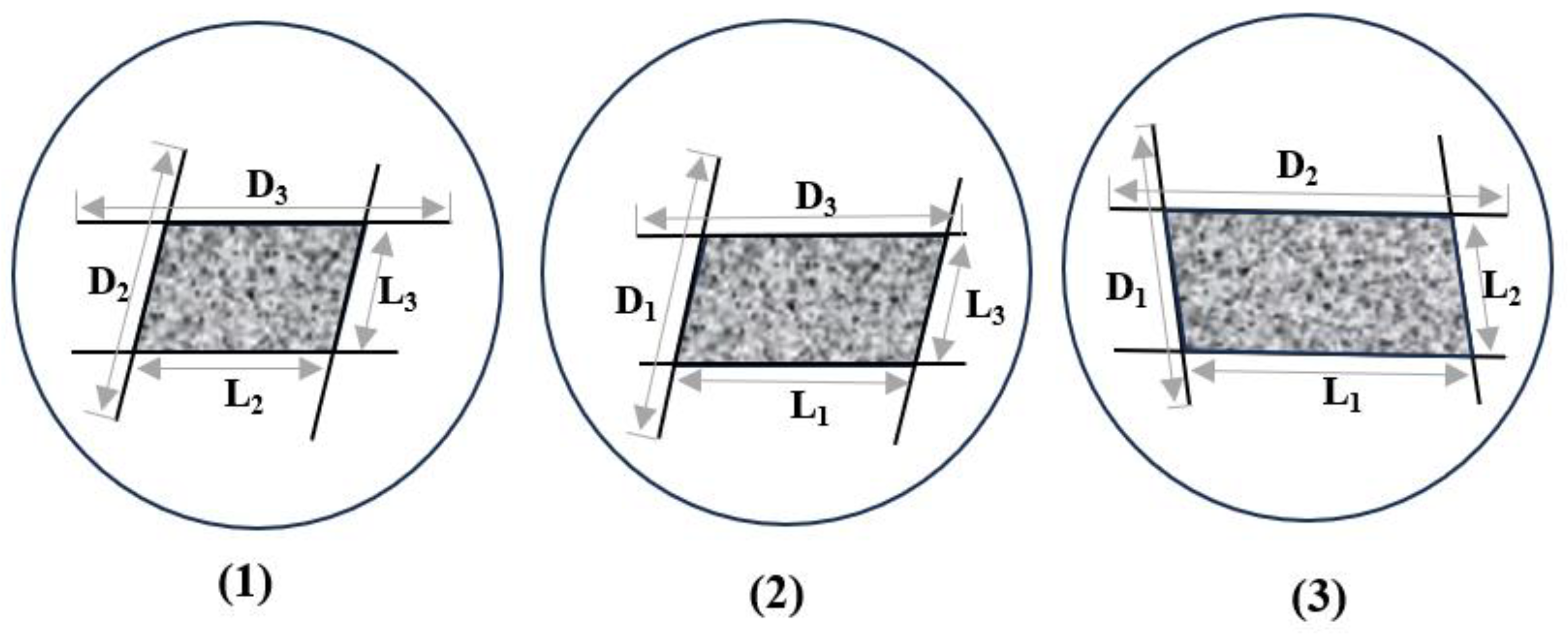
4. Two Types of Fractures that Result in Block Formation
5. Effects of Spatial Heterogeneity and Alignment on the Blockiness of 3D Fractures






6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DFNs | Discrete Fracture Networks |
| REV | Representative elemental volume |
| RQD | Rock quality designation |
| Jv | Volumetric fracture frequency |
| Kv | Degree of integrity of the rock mass |
| ISRM | International society for rock mechanics |
References
- Riquelme, A.J.; Tomás, R.; Abellán, A. Characterization of Rock Slopes through Slope Mass Rating Using 3D Point Clouds. Int. J. Rock Mech. Min. Sci. 2016, 84, 165–176. [Google Scholar] [CrossRef]
- Chen, S.; Qiao, C.; Ye, Q.; Khan, M.U. Comparative Study on Three-Dimensional Statistical Damage Constitutive Modified Model of Rock Based on Power Function and Weibull Distribution. Environ. Earth Sci. 2018, 77, 1–8. [Google Scholar] [CrossRef]
- Feng, X.T.; Guo, H. Sen; Yang, C.X.; Li, S.J. In Situ Observation and Evaluation of Zonal Disintegration Affected by Existing Fractures in Deep Hard Rock Tunneling. Eng. Geol. 2018, 242, 1–11. [Google Scholar] [CrossRef]
- Li, G.; Ma, F.; Guo, J.; Zhao, H.; Liu, G. Study on Deformation Failure Mechanism and Support Technology of Deep Soft Rock Roadway. Eng. Geol. 2020, 264. [Google Scholar] [CrossRef]
- Zhou, H.; Qu, C. kun; Hu, D. wei; Zhang, C. qing; Azhar, M.U.; Shen, Z.; Chen, J. In Situ Monitoring of Tunnel Deformation Evolutions from Auxiliary Tunnel in Deep Mine. Eng. Geol. 2017, 221, 10–15. [Google Scholar] [CrossRef]
- Kim, B.H.; Cai, M.; Kaiser, P.K.; Yang, H.S. Estimation of Block Sizes for Rock Masses with Non-Persistent Joints. Rock Mech. Rock Eng. 2007, 40, 169–192. [Google Scholar] [CrossRef]
- Singh, B.; Goel, R.K. Rock Quality Designation. Rock Mass Classif. 1999, 17–24. [Google Scholar] [CrossRef]
- Liu, Q.; Liu, J.; Pan, Y.; Kong, X.; Hong, K. A Case Study of TBM Performance Prediction Using a Chinese Rock Mass Classification System – Hydropower Classification (HC) Method. Tunn. Undergr. Sp. Technol. 2017, 65, 140–154. [Google Scholar] [CrossRef]
- Chen, Q.; Wang, S.; Yin, T.; Niu, W. Improvement of the Concept of the Blockiness Level of Rock Masses. Arab. J. Geosci. 2021, 14. [Google Scholar] [CrossRef]
- Barton, N.; Lien, R.; Lunde, J. Engineering Classification of Rock Masses for the Design of Tunnel Support. Rock Mech. Felsmechanik Mécanique des Roches 1974, 6, 189–236. [Google Scholar] [CrossRef]
- Xia, L.; Yu, Q. Numerical Investigations of Blockiness of Fractured Rocks Based on Fracture Spacing and Disc Diameter. Int. J. Geomech. 2020, 20, 1–10. [Google Scholar] [CrossRef]
- Elmouttie, M.K.; Poropat, G. V. A Method to Estimate in Situ Block Size Distribution. Rock Mech. Rock Eng. 2012, 45, 401–407. [Google Scholar] [CrossRef]
- Ajayi, K.M.; Shahbazi, K.; Tukkaraja, P.; Katzenstein, K. A Discrete Model for Prediction of Radon Flux from Fractured Rocks. J. Rock Mech. Geotech. Eng. 2018, 10, 879–892. [Google Scholar] [CrossRef]
- Zhu, H.; Zuo, Y.; Li, X.; Deng, J.; Zhuang, X. Estimation of the Fracture Diameter Distributions Using the Maximum Entropy Principle. Int. J. Rock Mech. Min. Sci. 2014, 72, 127–137. [Google Scholar] [CrossRef]
- Hu, H.; Xia, B.; Luo, Y.; Gao, Y. Effect of Crack Angle and Length on Mechanical and Ultrasonic Properties for the Single Cracked Sandstone Under Triaxial Stress Loading-Unloading. Front. Earth Sci. 2022, 10, 1–13. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, S.; Zhang, M.; Wu, B. Identification of Key Blocks Considering Finiteness of Discontinuities in Tunnel Engineering. Front. Earth Sci. 2022, 10, 1–13. [Google Scholar] [CrossRef]
- Alber, M.; Yaralı, O.; Dahl, F.; Bruland, A.; Käsling, H.; Michalakopoulos, T.N.; Cardu, M.; Hagan, P.; Aydın, H.; Özarslan, A. ISRM Suggested Method for Determining the Abrasivity of Rock by the CERCHAR Abrasivity Test; 2013; ISBN 9783319077123.
- Li, A.; Li, Y.; Wu, F.; Shao, G.; Sun, Y. Simulation Method and Application of Three-Dimensional DFN for Rock Mass Based on Monte-Carlo Technique. Appl. Sci. 2022, 12. [Google Scholar] [CrossRef]
- Gan, Q.; Elsworth, D. A Continuum Model for Coupled Stress and Fluid Flow in Discrete Fracture Networks. Geomech. Geophys. Geo-Energy Geo-Resources 2016, 2, 43–61. [Google Scholar] [CrossRef]
- Zhang, L.; Xia, L.; Yu, Q. Determining the REV for Fracture Rock Mass Based on Seepage Theory. Geofluids 2017, 2017. [Google Scholar] [CrossRef]
- Kulatilake, P.H.S.W.; Wathugalat, D.N.; Stephansson, O. Joint Network Modelling with a Validation Exercise in Stripa Mine, Sweden; 1993; Vol. 30.
- Chen, S.H.; Feng, X.M.; Isam, S. Numerical Estimation of REV and Permeability Tensor for Fractured Rock Masses by Composite Element Method. Int. J. Numer. Anal. Methods Geomech. 2008, 32, 1459–1477. [Google Scholar] [CrossRef]
- Li, Z.W.; Huang, C.Y.; Wang, H.X.; Xing, S.C.; Long, M.C.; Liu, Y. Determination of Heat Transfer Representative Element Volume and Three-Dimensional Thermal Conductivity Tensor of Fractured Rock Masses. Int. J. Rock Mech. Min. Sci. 2023, 170. [Google Scholar] [CrossRef]
- Narendran, V.M.; Cleary, M.P. ELASTOSTATIC INTERACTION OF MULTIPLE ARBITRARILY SHAPED CRACKS IN PLANE INHOMOGENEOUS REGIONS; 1984; Vol. 19.
- Wang, X.; Zheng, J.; Sun, H. A Method to Identify the Connecting Status of Three-Dimensional Fractured Rock Masses Based on Two-Dimensional Geometric Information. J. Hydrol. 2022, 614, 128640. [Google Scholar] [CrossRef]
- Nordahl, K.; Ringrose, P.S.; Wen, R. Petrophysical Characterization of a Heterolithic Tidal Reservoir Interval Using a Process-Based Modelling Tool.
- Rodríguez, J.M.; Carbonell, J.M.; Jonsén, P. Numerical Methods for the Modelling of Chip Formation. Arch. Comput. Methods Eng. 2020, 27, 387–412. [Google Scholar] [CrossRef]
- Tiedeman, C.R.; Shapiro, A.M.; Hsieh, P.A.; Imbrigiotta, T.E.; Goode, D.J.; Lacombe, P.J.; DeFlaun, M.F.; Drew, S.R.; Johnson, C.D.; Williams, J.H.; et al. Bioremediation in Fractured Rock: 1. Modeling to Inform Design, Monitoring, and Expectations. Groundwater 2018, 56, 300–316. [Google Scholar] [CrossRef]

| Description | Persistence (m) |
|---|---|
| Very low persistence (VLP) | <1 |
| Low persistence (LP) | 1-3 |
| Medium persistence (MP) | 3-10 |
| High persistence (HP) | 10-20 |
| Very high persistence (VHP) | >20 |
| Description | Spacing (mm) |
|---|---|
| Extremely close spacing (ECS) | <20 |
| Very close spacing (VCS) | 20-60 |
| Close spacing (CS) | 60-200 |
| Moderate spacing (MS) | 200-600 |
| Wide spacing (WS) | 600-2000 |
| Very wide spacing (VWS) | 2000-6000 |
| Extremely wide spacing (EWS) | >6000 |
| S=6.00 | S=4.00 | S=2.00 | S=1.30 | S=0.90 | S=0.60 | S=0.40 | S=0.20 | S=0.13 | S=0.06 | S=0.04 | S=0.02 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| D=1.0 | 0.212 | 0.318 | 0.637 | 0.979 | 1.572 | 2.122 | 3.183 | 6.366 | 9.794 | 21.221 | 31.831 | 63.662 | |
| D=2.0 | 0.040 | 0.08 | 0.159 | 0.245 | 0.354 | 0.401 | 0.796 | 1.592 | 2.449 | 5.305 | 7.958 | 15.916 | |
| D=3.0 | 0.024 | 0.035 | 0.071 | 0.109 | 0.157 | 0.236 | 0.354 | 0.707 | 1.075 | 2.358 | 3.407 | 7.074 | |
| D=6.5 | 0.005 | 0.002 | 0.015 | 0.023 | 0.033 | 0.050 | 0.075 | 0.151 | 0.232 | 0.502 | 0.740 | 1.507 | |
| D=10.0 | 0.002 | 0.003 | 0.006 | 0.010 | 0.014 | 0.021 | 0.032 | 0.064 | 0.098 | 0.212 | 0.318 | 0.637 | |
| D=15.0 | 0.001 | 0.001 | 0.003 | 0.004 | 0.006 | 0.009 | 0.014 | 0.028 | 0.044 | 0.094 | 0.142 | 0.283 | |
| D=20.0 | 0.001 | 0.001 | 0.002 | 0.002 | 0.004 | 0.005 | 0.002 | 0.016 | 0.025 | 0.040 | 0.080 | 0.159 |
| No. | D1 | S1 | Dip-direction1 | Dip-angle1 | D2 | S2 | Dip-direction2 | Dip-angle2 | D3 | S3 | Dip-direction3 | Dip-angle3 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 0.9 | 140.00 | 18.00 | 15 | 0.9 | 144.00 | 69.00 | 15 | 0.04 | 164.00 | 76.00 |
| 2 | 3 | 0.06 | 22.00 | 36.00 | 6.5 | 0.4 | 113.40 | 45.54 | 20 | 1.3 | 243.60 | 80.92 |
| 3 | 65 | 2 | 253.00 | 66 | 3 | 0.4 | 158.00 | 3 | 6.5 | 0.90 | 325.30 | 52.05 |
| 4 | 1 | 0.9 | 219.70 | 4.592 | 6.5 | 0.06 | 125.40 | 48.30 | 2 | 0.9 | 222.00 | 17.64 |
| 5 | 15 | 0.02 | 216.80 | 76.64 | 10 | 0.6 | 19.94 | 56.98 | 10 | 0.2 | 229.60 | 59.78 |
| 6 | 2 | 0.6 | 352.40 | 17.99 | 15 | 0.02 | 171.10 | 76.56 | 1 | 0.04 | 259.90 | 11.21 |
| 7 | 1 | 0.06 | 134.30 | 9.99 | 15 | 2 | 317.70 | 67.56 | 3 | 2 | 204.00 | 28.55 |
| 8 | 20 | 0.2 | 211.30 | 85.55 | 3 | 6 | 258.10 | 26.01 | 3 | 0.9 | 352.70 | 30.57 |
| 9 | 2 | 6 | 33.34 | 12.75 | 15 | 4 | 1.21 | 66.64 | 15 | 0.04 | 42.64 | 75.87 |
| 10 | 10 | 0.02 | 340.50 | 64.36 | 10 | 2 | 128.90 | 54.57 | 15 | 1.3 | 209.30 | 67.93 |
| 11 | 15 | 0.90 | 239.00 | 23.00 | 6.5 | 0.60 | 69.00 | 13.00 | 10 | 0.60 | 264.00 | 2.00 |
| 12 | 1 | 0.6 | 310.90 | 5.55 | 15 | 0.13 | 118.00 | 73.29 | 15 | 0.02 | 208.60 | 77.51 |
| 13 | 2 | 0.4 | 249.00 | 19.14 | 1 | 0.04 | 291.40 | 10.51 | 6.5 | 0.04 | 179.30 | 50.29 |
| 14 | 10 | 0.90 | 221.00 | 2.00 | 3 | 0.60 | 95.00 | 10.00 | 6.5 | 1.30 | 41.00 | 41.00 |
| 15 | 15 | 1.3 | 75.81 | 68.38 | 10 | 0.04 | 91.51 | 62.38 | 6.5 | 0.04 | 295.60 | 49.40 |
| 16 | 1 | 0.4 | 183.10 | 6.72 | 6.5 | 4 | 156.30 | 39.70 | 2 | 0.6 | 281.30 | 18.36 |
| 17 | 10 | 0.04 | 198.30 | 63.29 | 3 | 6 | 288.90 | 26.40 | 6.5 | 4 | 333.10 | 39.70 |
| 18 | 2 | 0.2 | 275.00 | 21.13 | 10 | 6 | 239.90 | 52.53 | 6.5 | 0.06 | 22.91 | 48.42 |
| 19 | 10 | 0.6 | 322.60 | 57.15 | 2 | 4 | 262.00 | 14.56 | 6.5 | 0.4 | 206.50 | 45.83 |
| 20 | 20 | 0.06 | 233.40 | 87.55 | 10 | 0.04 | 43.90 | 63.25 | 20 | 0.4 | 165.40 | 84.07 |
| 21 | 2 | 0.9 | 17.28 | 17.27 | 3 | 0.9 | 102.70 | 30.54 | 2 | 1.3 | 234.60 | 16.21 |
| 22 | 6.5 | 1.30 | 199.00 | 2.00 | 6.5 | 0.60 | 276.00 | 42.00 | 3 | 0.20 | 70.00 | 3.00 |
| 23 | 1 | 0.13 | 256.30 | 8.86 | 10 | 0.9 | 58.92 | 56.83 | 1 | 0.13 | 21.19 | 8.58 |
| 24 | 6.5 | 4 | 110.10 | 39.79 | 20 | 0.4 | 37.35 | 84.68 | 1 | 0.9 | 217.60 | 4.40 |
| 25 | 20 | 1.3 | 153.70 | 81.33 | 3 | 6 | 182.80 | 26.37 | 2 | 0.2 | 225.60 | 20.66 |
| 26 | 15 | 0.9 | 236.20 | 69.92 | 3 | 0.04 | 192.70 | 37.34 | 2 | 0.6 | 47.79 | 18.36 |
| 27 | 10 | 0.6 | 245.50 | 57.10 | 10 | 1.3 | 108.40 | 54.92 | 6.5 | 2 | 98.21 | 41.06 |
| 28 | 6.5 | 1.3 | 184.90 | 42.40 | 10 | 2 | 299.60 | 54.35 | 10 | 0.6 | 284.20 | 57.70 |
| 29 | 20 | 6 | 242.70 | 77.71 | 15 | 0.06 | 291.70 | 75.34 | 10 | 0.9 | 118.30 | 56.80 |
| 30 | 15 | 6 | 207.90 | 65.54 | 6.5 | 0.02 | 41.41 | 51.43 | 3 | 0.2 | 357.20 | 34.10 |
| 31 | 2 | 1.3 | 135.30 | 16.75 | 15 | 2 | 94.60 | 67.08 | 6.5 | 0.02 | 282.30 | 50.47 |
| 32 | 20 | 0.9 | 62.24 | 82.28 | 2 | 0.13 | 69.15 | 22.08 | 2 | 0.9 | 336.80 | 17.18 |
| 33 | 10 | 1.3 | 239.10 | 54.97 | 10 | 0.02 | 52.74 | 63.50 | 10 | 4 | 224.40 | 53.15 |
| 34 | 3 | 0.6 | 1.22 | 31.94 | 6.5 | 0.6 | 47.95 | 44.95 | 1 | 0.2 | 111.80 | 7.31 |
| 35 | 15 | 2 | 131.50 | 67.34 | 10 | 1.3 | 50.42 | 55.64 | 10 | 0.9 | 156.50 | 56.40 |
| 36 | 10 | 0.04 | 315.80 | 62.83 | 15 | 0.2 | 200.60 | 73.14 | 3 | 2 | 56.25 | 13.56 |
| 37 | 10 | 6 | 347.70 | 52.37 | 20 | 4 | 199.00 | 78.88 | 2 | 1.3 | 283.20 | 82.87 |
| 38 | 10 | 0.9 | 204.20 | 55.88 | 15 | 4 | 300.40 | 66.15 | 15 | 0.02 | 200.30 | 3.93 |
| 39 | 10 | 0.13 | 92.97 | 60.71 | 20 | 0.04 | 258.30 | 88.78 | 3 | 2 | 201.50 | 28.64 |
| 40 | 10 | 6 | 53.05 | 51.75 | 3 | 2 | 91.16 | 27.80 | 2 | 0.13 | 30.95 | 15.81 |
| 41 | 1 | 0.06 | 106.50 | 9.87 | 20 | 4 | 204.80 | 79.00 | 15 | 0.02 | 175.00 | 77.38 |
| 42 | 15 | 2 | 281.70 | 67.67 | 15 | 4 | 190.70 | 14.08 | 3 | 1.3 | 202.90 | 29.72 |
| 43 | 1 | 0.2 | 213.90 | 7.21 | 20 | 0.04 | 247.60 | 6.96 | 10 | 0.4 | 224.50 | 58.27 |
| 44 | 15 | 0.06 | 132.40 | 74.55 | 3 | 2 | 132.60 | 49.55 | 6.5 | 2 | 158.10 | 40.75 |
| 45 | 3 | 0.04 | 52.11 | 37.18 | 20 | 4 | 131.10 | 27.16 | 6.5 | 1.3 | 324.00 | 42.32 |
| 46 | 6.5 | 0.4 | 223.40 | 45.56 | 1 | 0.4 | 134.10 | 13.88 | 3 | 1.3 | 77.74 | 29.37 |
| 47 | 15 | 2 | 91.02 | 67.09 | 6.5 | 0.04 | 96.39 | 28.53 | 15 | 0.06 | 305.00 | 75.15 |
| 48 | 20 | 0.13 | 281.30 | 87.19 | 20 | 4 | 338.50 | 79.40 | 15 | 4 | 89.30 | 65.91 |
| 49 | 3 | 4 | 158.00 | 27.28 | 20 | 0.2 | 190.60 | 85.82 | 1 | 0.02 | 237.00 | 11.57 |
| 50 | 1 | 0.4 | 166.80 | 5.98 | 15 | 04 | 297.90 | 71.36 | 6.5 | 0.13 | 303.00 | 47.69 |
| No | B(%) | REV | No | B(%) | REV |
|---|---|---|---|---|---|
| 1 | 84.1697 | 8 | 26 | 41.6078 | 8 |
| 2 | 5.8664 | 6 | 27 | 0.6968 | 8 |
| 3 | 0.0477 | 8 | 28 | 0.7048 | 10 |
| 4 | 1.1088 | 14 | 29 | 53.6391 | 14 |
| 5 | 95.4269 | 16 | 30 | 8.5866 | 16 |
| 6 | 83.0128 | 8 | 31 | 1.4342 | 12 |
| 7 | 0.2659 | 8 | 32 | 19.7656 | 16 |
| 8 | 0.3314 | 12 | 33 | 4.8809 | 12 |
| 9 | 1.4802 | 16 | 34 | 0.2954 | 12 |
| 10 | 60.8001 | 6 | 35 | 2.3381 | 10 |
| 11 | 0.4089 | 12 | 36 | 91.9793 | 10 |
| 12 | 98.2560 | 14 | 37 | 2.1001 | 10 |
| 13 | 77.8435 | 10 | 38 | 0.2244 | 12 |
| 14 | 0.0008 | 8 | 39 | 97.4617 | 16 |
| 15 | 97.2955 | 12 | 40 | 0.0002 | 8 |
| 16 | 0.0017 | 10 | 41 | 94.1427 | 16 |
| 17 | 0.2988 | 12 | 42 | 0.0019 | 12 |
| 18 | 2.4939 | 10 | 43 | 1.6004 | 8 |
| 19 | 0.8873 | 6 | 44 | 88.3361 | 12 |
| 20 | 89.1926 | 8 | 45 | 0.3696 | 8 |
| 21 | 0.0054 | 6 | 46 | 0.0252 | 12 |
| 22 | 0.0244 | 12 | 47 | 15.1572 | 14 |
| 23 | 4.4814 | 8 | 48 | 6.9122 | 16 |
| 24 | 0.4395 | 8 | 49 | 57.8498 | 16 |
| 25 | 0.0044 | 10 | 50 | 63.3311 | 12 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



