Submitted:
27 December 2024
Posted:
28 December 2024
You are already at the latest version
Abstract
This paper addresses the challenge of designing an automatic train driving controller for high-speed railway systems to improve the accuracy and stability of train speed control. The Automatic Train Operation (ATO) system is crucial for ensuring safety, punctuality, and comfort. Traditional control algorithms, such as PID, Sliding Mode Control (SMC), and neural networks, have limitations in handling the nonlinear and time-varying nature of train dynamics. To overcome these, we propose a PID-type Iterative Learning Control (ILC) algorithm that leverages the repetitive characteristics of train operations. The algorithm combines feedback and feedforward mechanisms to process operational data iteratively, enabling rapid and accurate tracking of the target speed curve. Simulations using real track data and train parameters validate the algorithm's effectiveness, demonstrating improved tracking accuracy and convergence as the number of iterations increases. The PID-type ILC algorithm outperforms traditional PID control, showing its potential for high-precision, fast-response, and stable tracking in automatic train operation systems.
Keywords:
PID
; Iterative Learning Control (ILC)
; Automatic Train Operation (ATO)
; Curve Tracking Algorithm
; Error
1. Introduction
The Automatic Train Operation (ATO) system is a crucial technology for high-speed railway train control. It utilizes the operational speed curve as a reference for speed tracking, automatically adjusting the train's velocity to ensure precise speed control while maintaining safety, punctuality, and passenger comfort. However, high-speed trains operate at high velocities within complex and dynamic environments. The train control system is vulnerable to both internal and external disturbances, which lead to rapid, time-varying, and strongly nonlinear characteristics. Therefore, designing an intelligent automatic train driving controller to ensure precise control is a pressing issue that requires immediate attention.
Current research on automatic train driving control algorithms primarily focuses on Proportional Integral Derivative (PID) controllers, often in combination with Sliding Mode Control (SMC) [1], predictive control [2,3], fuzzy control [4], neural networks [5,6], and other methods. However, these approaches exhibit several notable limitations. Firstly, they linearize the nonlinear factors in train speed control, which may compromise the accuracy of control. Secondly, these algorithms lack the ability to learn, preventing them from adapting to the repetitive characteristics of train operation, such as the dynamic model, operating environment, and operational plans. Additionally, designing and fine-tuning control rules and parameters requires extensive practical experience, which complicates implementation.
The Iterative Learning Control (ILC) theory is particularly suitable for designing controllers for systems with highly repetitive characteristics [7]. Currently, ILC has been widely applied in modern control systems, including aviation and rail transit. For example, Yao [8] employed an intelligent PD-type ILC algorithm to address the path tracking problem of a sweeper operating in fixed sections of a park. Meng [9] integrated an iterative control strategy with Sliding Mode Control (SMC) to achieve precise tracking of the target trajectory by a manipulator. Additionally, He [10] proposed a differential parameter calculation method based on iterative learning to mitigate tracking errors in both the time and iterative domains. Gao [11] designed a model-free adaptive iterative learning fault-tolerant control strategy to address actuator faults and track high-speed train speed trajectories, considering both speed and traction/braking force constraints. Furthermore, Huang [12] introduced a novel ILC scheme that strictly limits speed and displacement to ensure the safety and comfort of high-speed train operations. Finally, Michael [13] developed a collective learning control method that combines ILC with a collective updating strategy to enhance the autonomous learning capability of multi-agent systems. These various applications demonstrate the versatility and potential of ILC in addressing complex control problems in automated systems. However, despite its advantages, there remain challenges in adapting ILC for real-time, high-speed train operations, especially in dealing with rapidly changing environmental conditions and disturbances.
Building on the above analysis and addressing the strong nonlinear and rapidly time-varying characteristics of the high-speed train automatic driving system, as well as the high repeatability of train operations, this paper introduces the concept of ILC. Accordingly, a PID-type ILC algorithm with both feedback and feedforward control is proposed for automatic train operation. The algorithm leverages iterative learning to process repeated operational data while handling non-repetitive disturbances during train operation in the time domain. This dual approach enables the train to track the target curve quickly and accurately. The effectiveness of the algorithm is validated through simulations in typical scenarios.
2. Problem Formulation
The railway operation entails a sophisticated and perpetual sequence of activities that are intricately interwoven with human elements, technological systems, and the ambient environment. This dynamic interplay necessitates a comprehensive understanding of the synergistic relationships among these constituents to ensure seamless and efficient operational protocols. This process can often be abstracted as a nonlinear multi-objective optimization problem. The ATO system must automatically adjust the train speed to accurately track the target speed curve of the train, minimize transitions between traction, braking, coasting, and operational states. This improves punctuality, parking accuracy, and passenger comfort while reducing the driver’s working intensity. The schematic diagram of the ATO system’s speed control is illustrated in Figure 1.
The dynamic model of the train operation represents the basis for the ATO system to calculate the target speed of train operation. Therefore, the model is shown in Eqs. (1) - (4):
where t represents the time, measured in seconds, whereas v denotes the train speed, measured in m/s and having a null initial condition (v(0)=0). Added to that, s represents the train operation distance, measured in m and having the following initial condition (s(0)=0). Moreover, u denotes the unit traction or braking force applied by the train dynamical system, expressed in N/kg, whereas w(v) represents the unit basic resistance of the train, expressed in N. Added to that, g(s) is the additional unit resistance of the train, also measured in N, l denotes an empirical constant, taking usually the value of gravitational acceleration, expressed in m/s2, and θs represents the line slope at position s, measured in °. Finally, Ca, Cv, and C0 are empirical constants standing for air resistance coefficient, mechanical resistance coefficient, and resistance coefficient of wheel rolling and sliding, respectively.
According to Eq. (3), the basic resistance includes a quadratic term correlated with train speed, representing a typical nonlinear characteristic. Nonetheless, attributable to the repetitive nature of train operations, the fundamental drag coefficient experienced by the train during each operational cycle can be perceived as either repetitive or in a quasi-stationary state over time. Leveraging the asymptotic convergence property of the iterative learning control (ILC) algorithm along the iterative axis, the recurring information embedded within the train's operational sequence can be adeptly managed. Consequently, the drag parameters at each sampling point of the train can be precisely ascertained.
Henceforth, the objective of this scholarly work is to engineer an automatic train driving control algorithm predicated on the principles of iterative learning. The aim is to identify an optimal control input sequence. As the number of iterations approaches infinity, the train is expected to accurately follow the desired trajectory along the fixed rail line. This precision in tracking ensures that the train operates with enhanced safety, efficiency, energy conservation, and passenger comfort.
3. Design of PID-Type ILC Algorithm
The automatic control of train speed is a typical tracking control problem. Consequently, applying ILC algorithms to train speed control enhances its ability to accurately track the target speed curve during operation.
The control objective of speed curve tracking is to ensure that the control variables in the train’s dynamic model, namely the train’s running speed v and displacement s, accurately track the target speed and displacement trajectories. Therefore, before designing the ILC controller, the tracking error for the system’s k-th iteration must be defined. Assume a finite time interval [0, T] is selected, typically representing the train's travel time between two adjacent stations. Repeating the train operation over this interval, denoted by k (k=0, 1, 2, ..., K), with the train’s operating speed v and displacement s as the system states, Eqs. (1) - (4) can be expressed as the system’s state space model. Upon reaching the k-th iteration, the system model is defined as follows:
where t is the time, expressed in seconds, vk(t)is the train speed of the k-th time iteration, measured in m/s, sk(t) represents the train operation displacement of the k-th iteration, expressed in m, and denote the first speed derivative and displacement respectively, representing the speed and displacement rate change, uk(t) denotes the system input, and, finally, yk(t) is the system output.
Definition 1: The tracking error ek(t) of the system is defined as follows:
where ek,1(t) is speed tracking error, measured in m/s, ek,2(t) represents the displacement tracking error, expressed in m, vd(t) is target speed, measured in m/s, and finally, sd(t) denotes the target displacement, expressed in m. The derivation of Eq. (7) with respect to time t yields the dynamic rate of change of the system’s tracking error, as shown in Eq. (8):
The iterative learning tracking law for the train’s target curve is designed based on the ILC concept, as shown in Eq. (9):
where α is the iterative learning gain with respect to the error, β denotes the iterative learning gain with respect to the rate of error change, and γ represents the learning law of the error integral term. By integrating the error rate of change and the error integral term in the controller’s iterative learning law, the system can achieve accurate tracking of the train's running trajectory after several iterations.
In summary, the block diagram of the PID-type ILC algorithm is designed as illustrated in Figure 2 where the tracking error ek is input to the PID feedback controller and the ILC controller, respectively, to generate the next inputs and . The train speed and displacement can approach the target speed and displacement curves quickly by combining both algorithms.
4. Simulation and Analysis
This section simulates the PID-type ILC algorithm proposed in the previous section through typical scenarios, and compares the simulation results with the PID control results to validate the performance of the proposed algorithm.
4.1. Controller Construction
This section simulates the PID-type ILC algorithm proposed earlier in typical scenarios and compares the simulation results with those of PID control to verify the effectiveness of this method. The simulation was performed using Matlab (2018b). The running resistance parameters in Eq. (3) are unknown, time-varying parameters influenced by the train’s dynamic operation and changes in external conditions. In controller design, empirical constants are often used. In this section, some technical parameters from the CRH-3 high-speed train, which is used in actual operation, are adopted as the train parameters, as shown in Table 1.
4.2. Design of Typical Simulation Scenario
The simulation line of train operation is set as follows:
(1) Through the simulation, the total length of the line is 99.95 km. There are two slope sections in the line: a 12.85 km-long section with a slope of 10‰ and a 4.1 km-long section with a slope of 7‰. The slope data of the simulated line is displayed in Figure 3.
Moreover, θs in Eq. (4) is usually very small; therefore, the value of sin(θs) can be approximated to θs. Considering the empirical constant l as the standard gravitational acceleration of 9.8 m/s2, the slope additional resistance g(s) is obtained according to Figure 3, as shown in Eq. (10):
(2) The simulation running time T is 1460 s, and the target speed curve of the train running within [0, T] is displayed in Eq. (11):
Moroever, the target displacement curve of the train within [0, T] is illustrated in Eq. (12):
(3) The proposed algorithm is based on the iterative domain; moreover, the feedback control is implemented using the time domain, and the ILC is implemented based on the iteration domain. The simulation sampling time ts is set to 0.1s;
(4) The learning gains in Eq. (9) are set α=0.5, β=0.05, and γ=0.1; therefore, the iterative learning law is displayed in Eq. (13):
(5) To facilitate of comparison of the control algorithms’ performance, the PID algorithm is evaluated against the PID-type ILC algorithm proposed in this paper, focusing on aspects such as convergence speed and tracking error. The control law of the PID algorithm is presented in Eq. (14):
where the gain of proportional term Kp is set to 5 according to reference [14], whereas the gain of integral term Ki is set to 0.1 and the one of the differential term Kd is set to 10.
(6) Definition 2: To quantify the tracking accuracy of PID-type ILC and PID algorithms, the tracking error rate re is displayed in Eq. (15):
where yd is the target value, and yd>0. Moreover, yr represents the actual value and the re value is represented using 2 decimal digits.
4.3. Simulation Result Analysis
By running the above simulation scenario using the PID-type ILC controller (refer to Eq. (11)) and the PID controller (refer to Eq. (12)), the speed and displacement tracking trajectories can be obtained, as illustrated in Figure 4 and Figure 5, respectively.
Figure 4 represents the tracking trajectory of the PID controller for the target speed curve, along with the tracking trajectories of PID-type ILC controller at the 1st, 5th, 15th, and 30th iterations. It also provides enlarged views of the tracking trajectory at the 30th iteration within the time intervals [197 s-210 s] and [610 s-655 s]. Several tracking points from Figure 4 are selected, and the speed tracking error rates for both controllers are calculated according to Eq. (16), as presented in Table 2.
According to Table 2, the speed tracking error rate of the PID-type ILC algorithm at the 30th iteration is less than 1%, significantly outperforming the PID algorithm. Additionally, for the same error rate, the implementation rate of PID-type ILC algorithm exhibits a faster response compared to the PID algorithm.
Figure 5 illustrates the tracking trajectory of the PID controller for the target displacement, alongside the tracking trajectories of the PID-type ILC controller at the 1st, 5th, 15th, and 30th iterations. Enlarged views of the displacement tracking trajectory at the 30th iteration within the time interval [810s-835s] are also provided. At 823.5s, the target displacement is 55,940 m, the tracking displacement of the PID controller is 54,890 m, the tracking error is 1,050 m, and re is equal to 1.88%. In comparison, the tracking displacement of the PID-type ILC controller is 55,870 m, with a tracking error is 80 m and an error rate re of 0.14%.
Referring to Figure 4 and Figure 5, a significant deviation is observed between the tracking trajectory of the PID-type ILC controller and the target trajectory at the start of the iteration. However, once the number of iterations reaches 15 or more, the two trajectories nearly overlap.
Figure 6 illustrates the absolute tracking error of the PID controller for both the target speed and target displacement. From this figure, the PID controller exhibits a high deviation rate during periods of target speed change, such as in the intervals [0s,200s), [620s,650s), [850s,900s), and [1300s,1460s). In summary, the PID algorithm lacks a learning mechanism, and increasing the number of iterations does not continuously reduce the tracking error. As a result, it cannot ensure tracking accuracy or convergence. This is particularly evident when the target speed changes, where the PID control algorithm exhibits a significant lag, resulting in a large error between the two trajectories.
Referring to Figure 7, the tracking error of the PID-type ILC controller decreases gradually as the number of iterations increases. By the 25th iteration, the speed and displacement tracking errors approach zero. In summary, the PID-type ILC algorithm efficiently learns from the target speed and displacement by learning repeated information of train operation, thereby achieving precise tracking.
5. Concluding Remarks
In this paper, the dynamic model of high-speed train operation is analyzed, and a curve tracking algorithm for ATO is designed based on the repetitive characteristics of train operation. The algorithm integrates the ILC law into the classical PID control law, achieving accurate tracking of the desired curve by learning from the error factors during the tracking process and the rate of error change from the previous iteration.
A typical simulation scenario was established to validate the performance of the designed algorithm using real track data and train parameters, and it was compared to existing algorithms. The simulation results demonstrate that the designed algorithm offers higher tracking accuracy. As the number of iterations increases, the actual running trajectory gradually converges with the target trajectory, with the tracking error steadily decreasing until it approaches zero. This confirms the effectiveness and superiority of the proposed algorithm. Consequently, the PID-type ILC algorithm presented in this article achieves high-precision, fast-response, and stable tracking of both the train’s target speed and target displacement.
The train dynamics model used in this paper treats high-speed trains as a single particle, whereas, in reality, high-speed trains operate with dispersed power systems. Therefore, it is essential to explore ILC methods based on a multi-particle model of the train. Additionally, integrating energy-saving operation strategies and autonomous driving techniques for high-speed trains will be key areas for next research direction.
Author Contributions
X.W.: Data curation, formal analysis, methodology, writing—original draft preparation. H.L.: Supervision, funding acquisition, writing—review and editing. Y.L.: Conceptualization, investigation. C.L.: Methodology, supervision, project administration. P.X.: Software, visualization. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Open Fund for Technological R&D of Rail Transit Control Engineering in Jiangsu Province (grant number: KFJ2411), Excellent Science and Technology Innovation Team of Nanjing Vocational Institute of Railway Technology (grant number: CXTD2022003), Bijie science and technology project (grant number: Bikelianhe [2023]45) and Guizhou Provincial Department of Education Youth Science and Technology Talents Growth Project (grant number: KY [2022]405 and KY [2024]251).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Li, M.; Wang, F.; Gao, F. PID-Based Sliding Mode Controller for Nonlinear Processes. Industrial & Engineering Chemistry Research 2001, 40, 2660–2667. [Google Scholar] [CrossRef]
- Havaei, P.; Sandidzadeh, M.A. Intelligent-PID controller design for speed track in automatic train operation system with heuristic algorithms. Journal of Rail Transport Planning & Management 2022, 22, 100321. [Google Scholar] [CrossRef]
- Xu, X.; Peng, J.; Zhang, R.; Chen, B.; Zhou, F.; Yang, Y.; Gao, K.; Huang, Z. Adaptive Model Predictive Control for Cruise Control of High-Speed Trains with Time-Varying Parameters. Journal of Advanced Transportation 2019, 2019, 7261726. [Google Scholar] [CrossRef]
- Pu, Q.; Zhu, X.; Liu, J.; Cai, D.; Fu, G.; Wei, D.; Sun, J.; Zhang, R. Integrated Optimal Design of Speed Profile and Fuzzy PID Controller for Train With Multifactor Consideration. IEEE Access 2020, 8, 152146–152160. [Google Scholar] [CrossRef]
- Milovanović, M.B.; Antić, D.S.; Milojković, M.T.; Nikolić, S.S.; Perić, S.L.; Spasić, M.D. Adaptive PID control based on orthogonal endocrine neural networks. Neural Networks 2016, 84, 80–90. [Google Scholar] [CrossRef]
- Pu, Q.; Zhu, X.; Zhang, R.; Liu, J.; Cai, D.; Fu, G. Speed Profile Tracking by an Adaptive Controller for Subway Train Based on Neural Network and PID Algorithm. IEEE Transactions on Vehicular Technology 2020, 69, 10656–10667. [Google Scholar] [CrossRef]
- Arimoto, S.; Kawamura, S.; Miyazaki, F. Bettering operation of Robots by learning. Journal of Robotic Systems 1984, 1, 123–140. [Google Scholar] [CrossRef]
- Yao, W.; Pang, Z.; Chi, R.; Shao, W.; Wang, H. Trajectory Tracking Control of Sweeping Car Based on Intelligent PD Iterative Learning Control. Journal of Qingdao University of Science and Technology(Natural Science Edition) 2022, 43, 105–110. [Google Scholar] [CrossRef]
- Meng, Q.; Nan, X.; Zhang, Y. Trajectory tracking control of manipulator based on PD type iterative learning. Modular Machine Tool & Automatic Manu-facturing Technique 2022, 11, 62–65. [Google Scholar]
- He, Z.; Xu, n. Research on Automatic Train Operation Algorithm Based on Non-parametric Iterative Learning Control. Journal of The China Railway Society 2020, 42, 90–96. [Google Scholar] [CrossRef]
- Gao, G.; Jin, S.; Wang, Q. Model Free Adaptive Iterative Learning Fault-tolerant Control for High-speed Trains with Speed and Input Constraints. In Proceedings of the 2021 IEEE 10th Data Driven Control and Learning Systems Conference (DDCLS), 2021, 14-16 May 2021; pp. 866–870. [Google Scholar]
- Huang, D.; Huang, T.; Chen, C.; Qin, N.; Jin, X.; Wang, Q.; Chen, Y. Iterative learning control for high-speed trains with velocity and displacement constraints. International Journal of Robust and Nonlinear Control 2022, 32, 3647–3661. [Google Scholar] [CrossRef]
- Michael, M.; Fabio, M.; Dustin, L.; Thomas, S. Collective Iterative Learning Control: Exploiting Diversity in Multi-Agent Systems for Reference Tracking Tasks. IEEE Transactions on Control Systems Technology 2022, 30, 1390–1402. [Google Scholar] [CrossRef]
- Wang, S.; Han, Y.; Chen, J.; Zhang, Z.; Liu, X. Active disturbance rejection control of UAV attitude based on iterative learning control. Acta Aeronautica et Astronautica Sinica 2020, 41, 324112. [Google Scholar] [CrossRef]
Figure 1.
Speed control schematic diagram of ATO system.
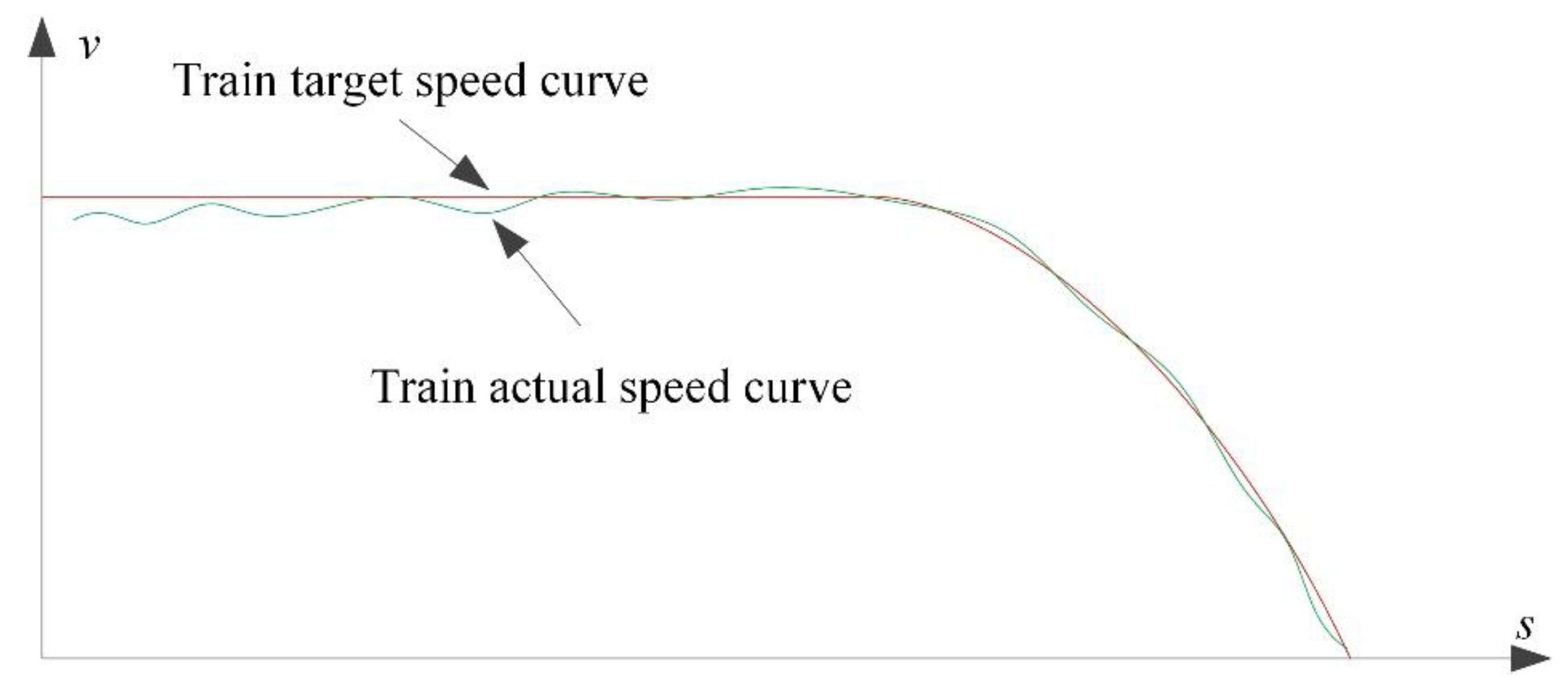
Figure 2.
Implementation block diagram of PID-type ILC algorithm.
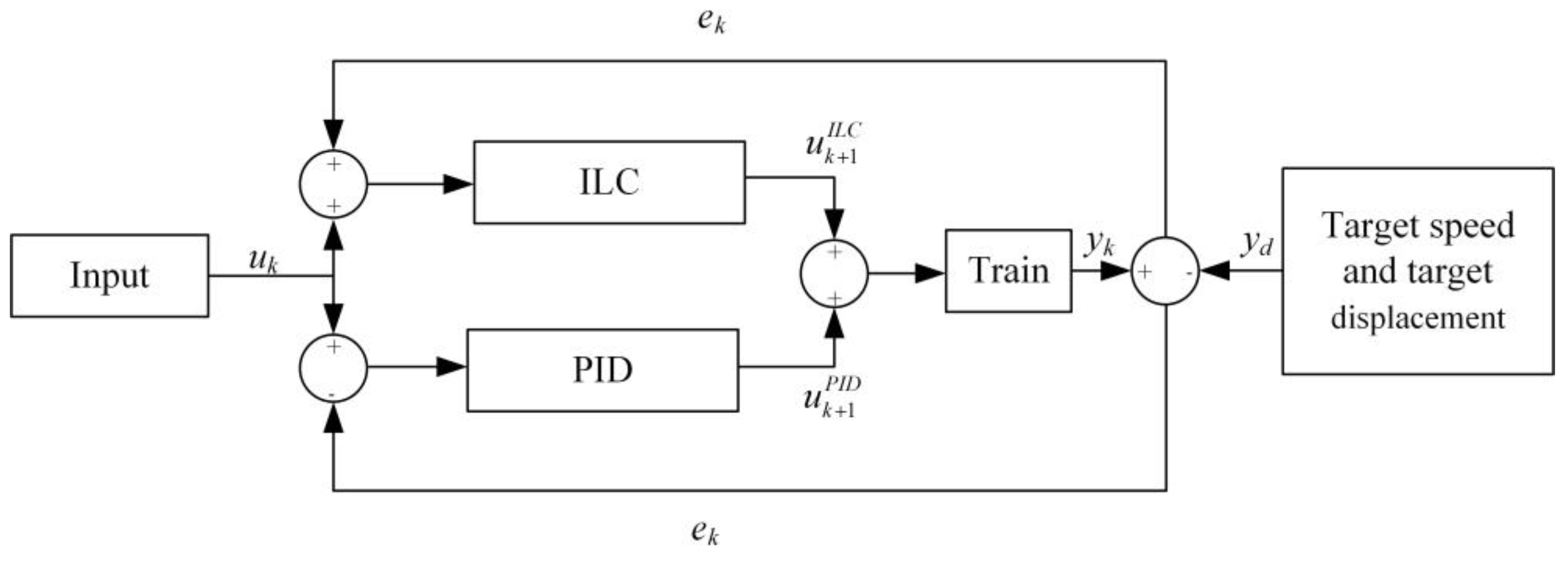
Figure 3.
Gradient data of simulation line.
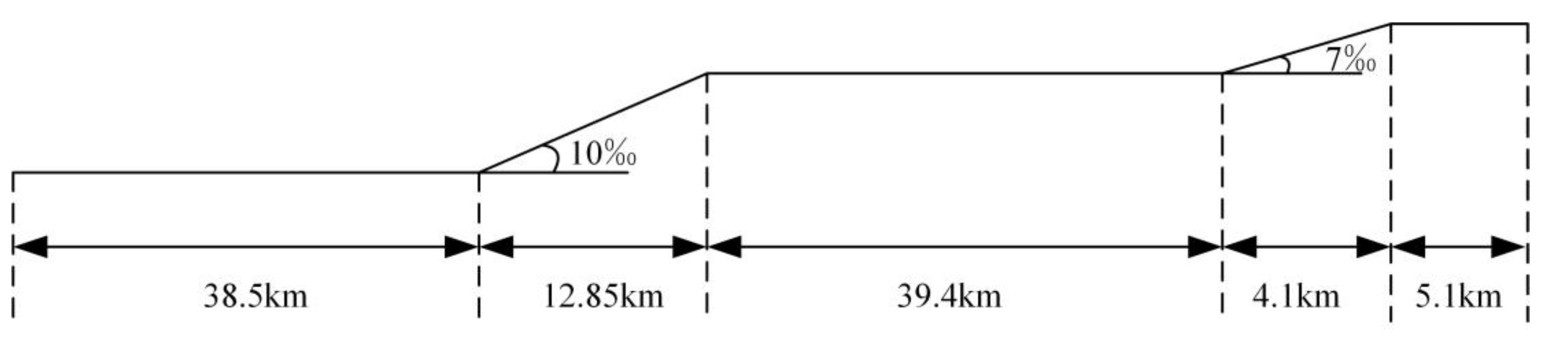
Figure 4.
Speed tracking results of PID controller and PID-type ILC controller.
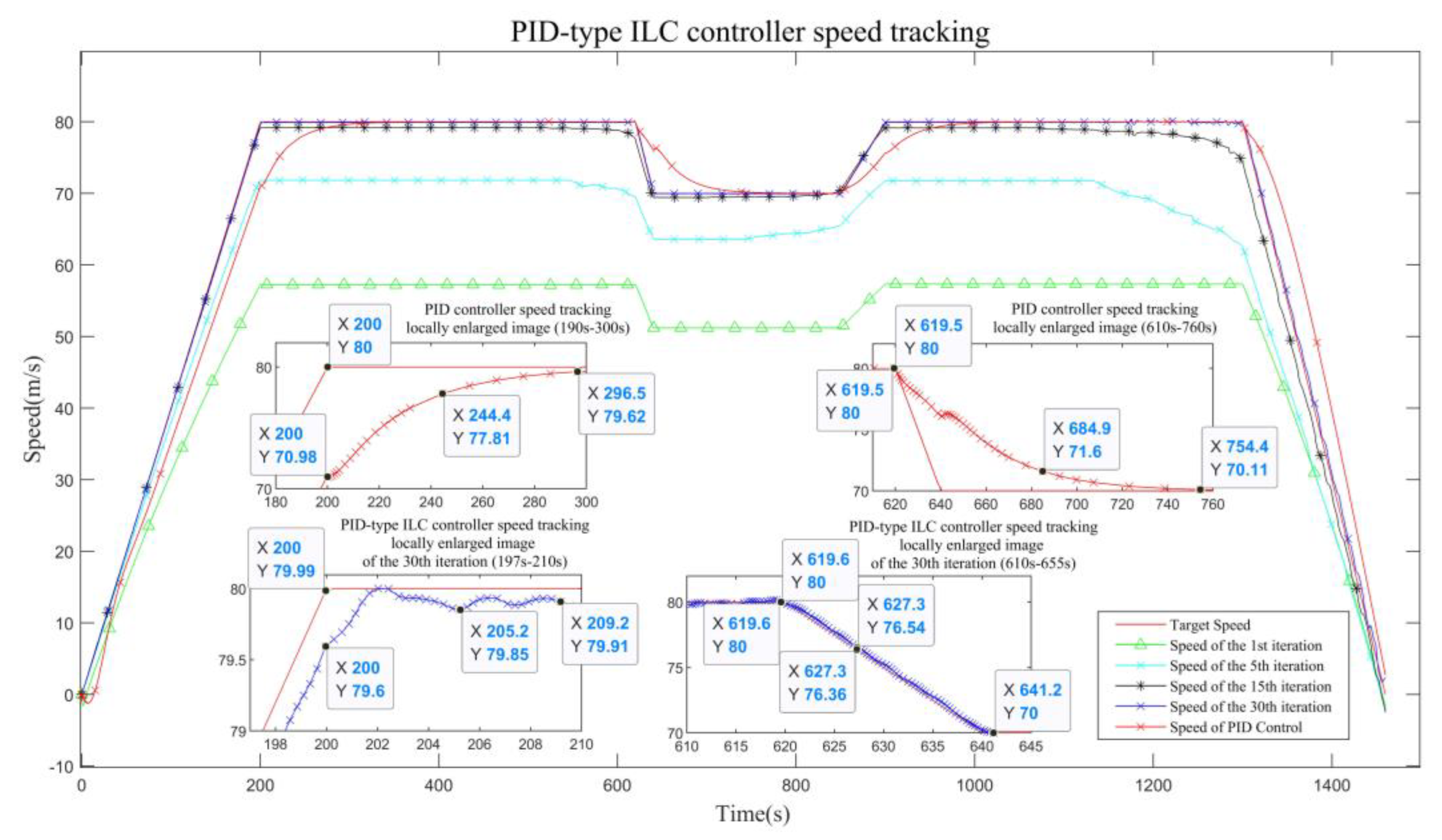
Figure 5.
Displacement tracking of PID controller and PID-type ILC controller.
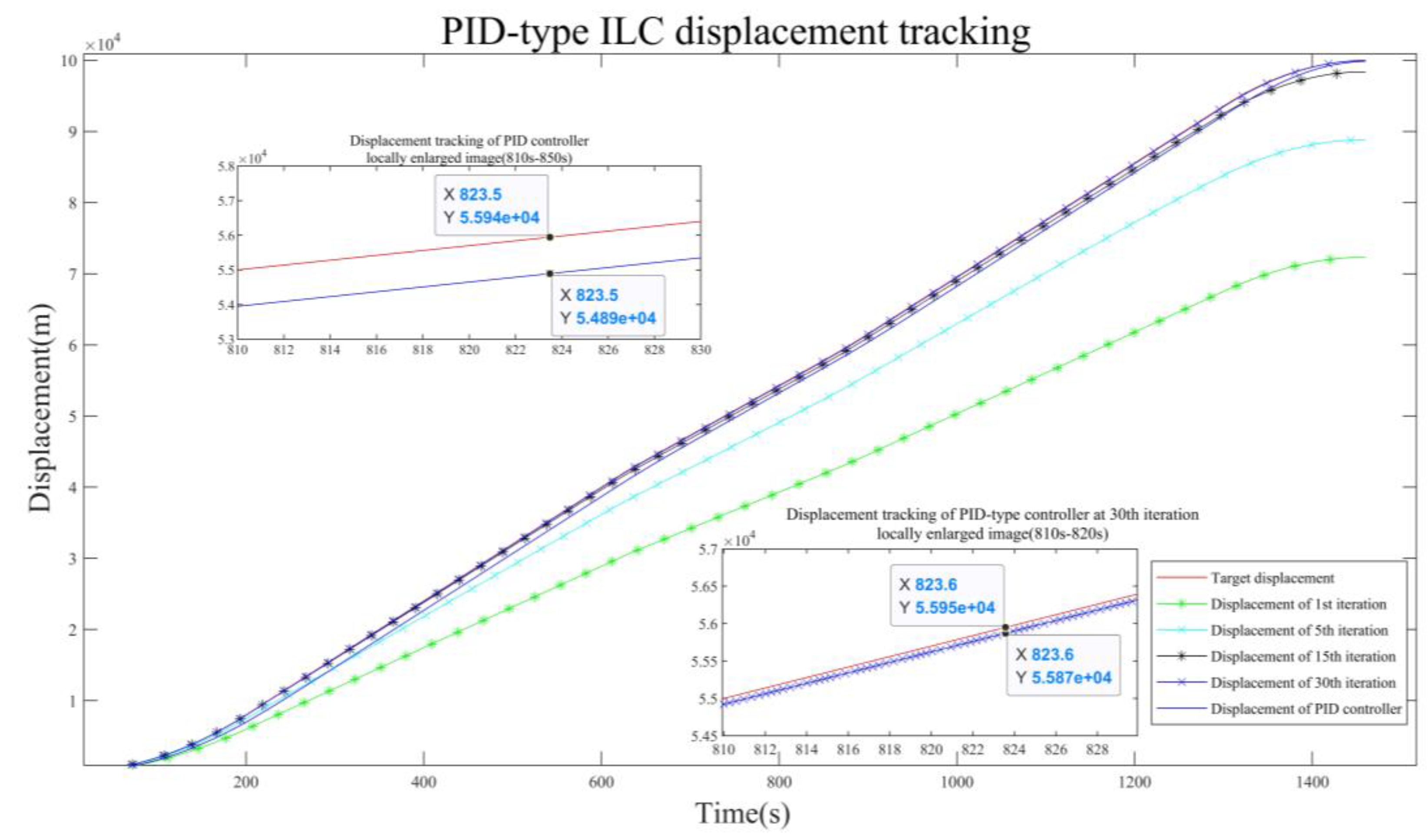
Figure 6.
Speed and displacement tracking absolute error rate of PID controller.
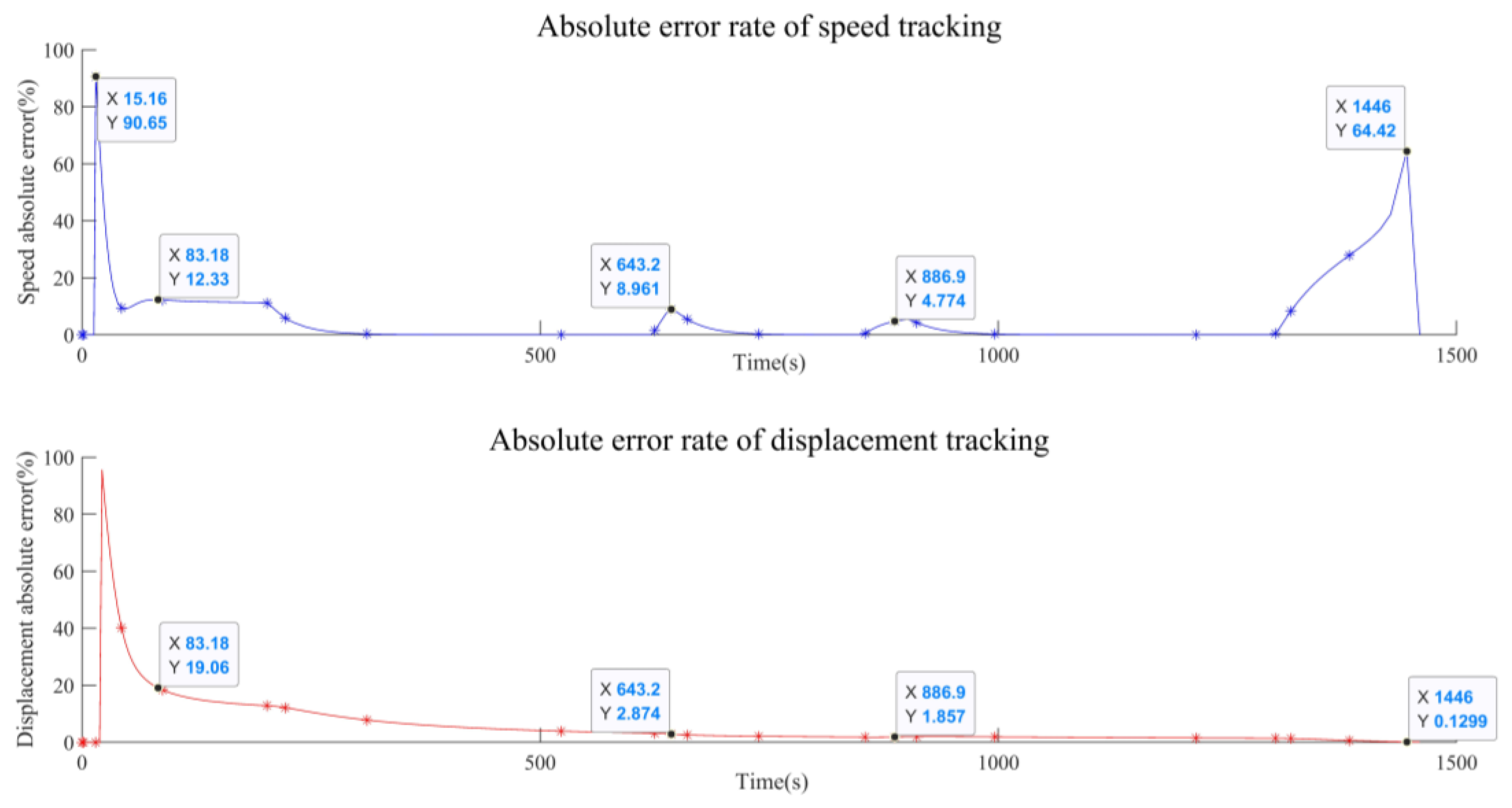
Figure 7.
The relationship between the absolute value of the maximum tracking errors and the number of iterations in PID-type ILC controller.
Figure 7.
The relationship between the absolute value of the maximum tracking errors and the number of iterations in PID-type ILC controller.
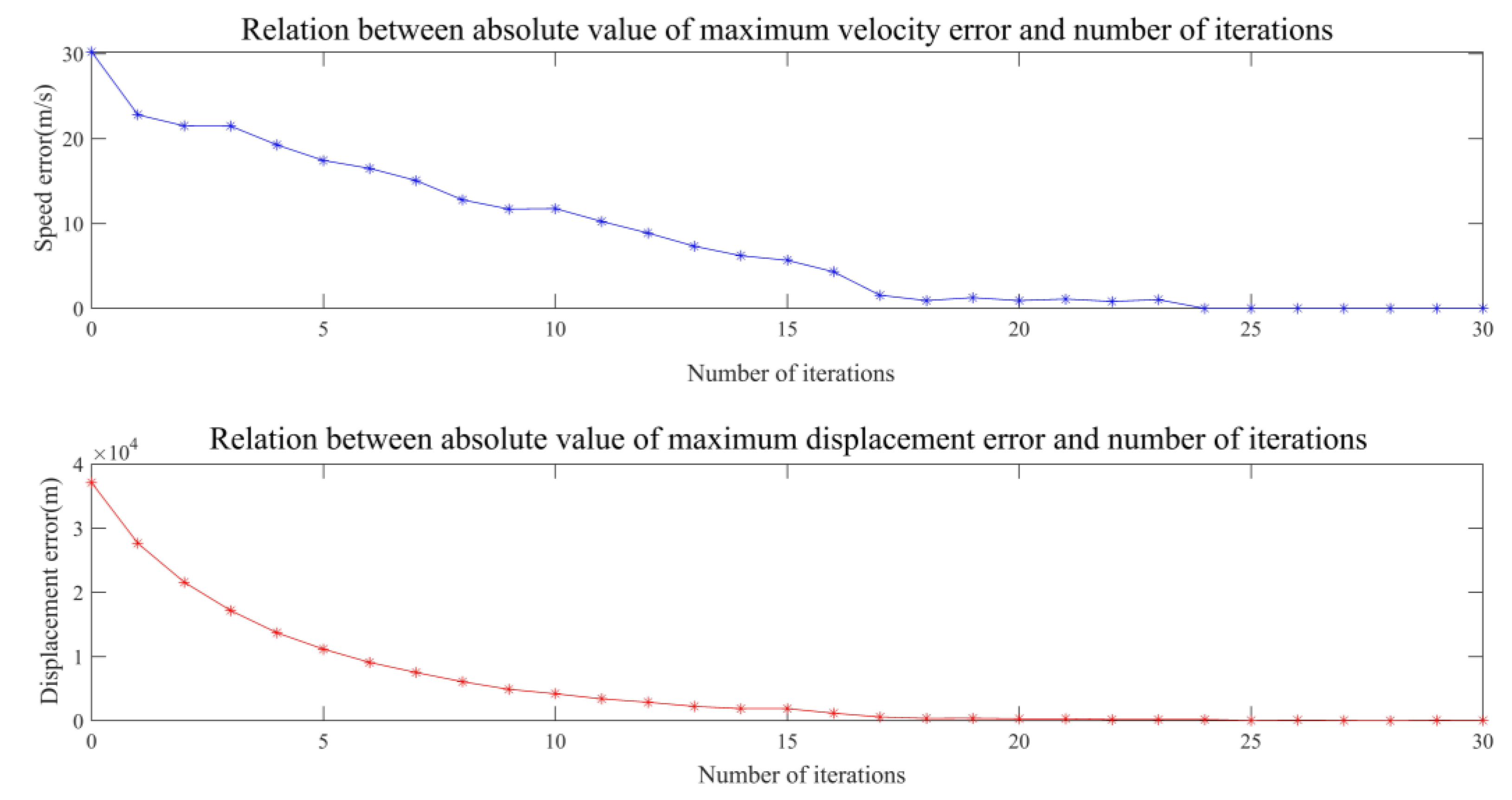

Table 1.
Partial technical parameters of high-speed railway CRH-3 EMU
| Parameters | Values | Units |
| Marshalling length | 200.67 | m |
| Marshalling weight | 380 | t |
| 0.0166 | N·h2/km2·t | |
| 0.228 | N·h/km·t | |
| 7.75 | N/t | |
| Maximum operation speed | 350 | km/h |
| Mean starting acceleration | 0.38 | m/s2 |
Table 2.
Analysis of speed tracking absolute error rates.
| Time /(s) | Target speed /(m/s) | Speed of PID controller/(m/s) | of PID controller | Speed of PID-type ILC controller/(m/s) | of PID-type ILC controller |
| 200 | 80 | 70.98 | 11.28% | 79.6 | 0.5% |
| 205.2 | 80 | / | / | 79.85 | 0.19% |
| 209.2 | 80 | / | / | 79.86 | 0.18% |
| 244.4 | 80 | 77.81 | 2.74% | / | / |
| 296.5 | 80 | 79.62 | 0.48% | / | / |
| 619.5 | 80 | 80 | 0% | / | / |
| 619.6 | 80 | / | / | 80 | 0% |
| 627.3 | 76.36 | / | / | 76.54 | 0.24 |
| 641.2 | 70 | / | / | 70 | 0% |
| 684.9 | 70 | 71.6 | 2.29% | / | / |
| 754.4 | 70 | 70.11 | 0.16% | / | / |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



