Submitted:
26 December 2024
Posted:
27 December 2024
You are already at the latest version
Abstract
This systematic review explores recent advancements in control methods for rehabilitation exo-skeleton robots, which assist individuals with motor impairments through guided movement. As robotics technology progresses, precise, adaptable, and safe control techniques have become ac-cessible for effective human-robot interaction in rehabilitation settings. Key control methods, including Computed Torque and Adaptive Control, excel in managing complex movements and adapting to diverse patient needs. Robust and Sliding Mode Controls address stability under unpredictable conditions. Traditional approaches, like PD and PID control schemes, maintain stability, performance and simplicity. In contrast, Admittance Control enhances user-robot in-teraction by balancing force and motion. Advanced methods, such as Model Predictive Control (MPC) and Linear Quadratic Regulator (LQR), provide optimization-based solutions. Intelligent controls using Neural Networks, Deep Learning, and Reinforcement Learning offer adaptive, patient-specific solutions by learning over time. This review provides an in-depth analysis of these control strategies by examining advancements in recent scientific literature, highlighting their potential to improve rehabilitation exoskeletons, and offering future recommendations for greater efficiency, responsiveness, and patient-centered functionality.
Keywords:
PD
; PID
; Adaptive Control
; Robust Control
; Sliding Mode Control
; Chattering Suppressor
; Intelligent Control
1. Introduction
Exoskeleton robots are becoming essential tools in aiding patients with motor impairments. They offer support and guidance for physical rehabilitation throughout the various stages of physical recovery. With rapid advancements in control technologies, exoskeleton robots are now equipped with sophisticated control systems that enhance safety, flexibility, and adaptability to meet the unique user’s needs. Effective control of the exoskeleton systems is crucial, as it enables accurate trajectory tracking of desired motions, accommodates the dynamic nature of human-robot interaction, and ensures the comfort and safety of the user. This systematic review explores recent advances in control techniques for rehabilitation exoskeletons, focusing on their role in enhancing the physical recovery experience for users.
Robot dynamic modeling is a core component of any exoskeleton control system. Dynamic modeling provides a mathematical representation of the exoskeleton robot's behavior. By nature, robot dynamics possess nonlinear behaviors. Most of the nonlinear controllers are model based controllers which utilize the dynamic model of the robot as a part of the control algorithms. Dynamic models allow us to simulate controller performance before implementation. Accurate dynamic models enable controllers to anticipate and respond to changes in the exoskeleton’s environment or the user’s movements. With accurate models, controllers can manage the robot's behavior, improving interaction and optimizing assistance for patients during rehabilitation exercises. Control systems typically comprise feedback loops, allowing real-time adjustments to enhance accuracy and safety. These systems ensure that exoskeletons can respond to the user’s needs and change conditions in the environment. As technology advances, control system architectures continue to evolve, incorporating newer, more efficient algorithms to manage complex interactions between robots and humans.
Computed Torque Control (CTC) is a widely used control technique that utilizes a model-based approach to linearize and control robots. CTC determines the exact torque needed for each movement and enables precise trajectory tracking, which makes it a crucial tool for patient-specific rehabilitation. Its effectiveness is heavily relied on the accuracy of dynamic models. It may need adaptation to account for variations in the dynamic model.
Adaptive control dynamically responds to changes in system behavior or environmental conditions, which makes it ideal for rehabilitation exoskeletons. This strategy continuously adjusts control parameters in real-time, effectively addressing variations in patient behavior and interaction forces during therapy. Its flexibility enables it to meet diverse patient needs and physical conditions. As a result, rehabilitation robotics widely adopts adaptive control that provides personalized and effective support throughout recovery.
Robust Control techniques are developed to maintain performance despite unpredictable disturbances or modeling inaccuracies. This method provides consistent assistance across different usage scenarios and users. By counteracting uncertainties, robust control allows for stable and safe operation even when faced with unmodeled dynamics.
Sliding Mode Control (SMC) is another robust approach known for its ability to handle system uncertainties and disturbances. SMC ensures stable control by forcing the system to "slide" along a predefined trajectory. This capability is particularly valuable in rehabilitation, where patient movements can be unpredictable. The control system must quickly adapt to maintain the desired performance.
Traditional techniques such as Linear Control techniques remain widely used due to their simplicity and reliability. PID control provides straightforward regulation of speed and position. This makes it useful in scenarios with relatively stable dynamics. However, these methods may struggle with more complex or nonlinear dynamics present in many exoskeleton applications.
Admittance Control is designed to regulate how the robot responds to external forces, making it particularly suitable for exoskeletons. By controlling the relationship between force and motion, admittance control helps create a more natural and intuitive interaction between the user and the device.
Model Predictive Control (MPC) and Linear Quadratic Regulator (LQR) techniques provide optimal control solutions. It balances multiple performance criteria, such as energy consumption, precision, and stability. For example, model predictive control anticipates future states and adjusts control actions accordingly. LQR optimizes controller gains to minimize a given cost function. These approaches are highly adaptable to complex rehabilitation scenarios where fine control is required.
Recent advancements have brought in Intelligent Control Systems, integrating machine learning and data-driven methods for better performance. Neural network-based control systems are dedicated to learn patterns from past interactions. It enables adaptive and personalized rehabilitation experiences. Similarly, Deep Learning-based control systems provide more advanced pattern recognition, helping the exoskeleton to predict and adjust to patient-specific movements.
This review explores these diverse control techniques in-depth, analyzing their benefits, limitations, and potential applications in rehabilitation robotics. Through a systematic examination of literature, we aim to provide insights into how these control methods can be combined or improved to meet the growing demands of rehabilitation technology. The findings are intended to guide future developments in control systems which will help build more efficient rehabilitation exoskeletons capable of adapting individual patient needs.
This article is organized into 8 comprehensive sections, each addressing critical aspects of control techniques for rehabilitation exoskeleton robots. Section 1 introduces readers to a range of control methodologies that are commonly employed in rehabilitation exoskeletons, emphasizing their distinctive features and practical applications. Section 2, provides an overview of existing review articles, examining their focus on control strategies within the context of rehabilitation robotics and identifying gaps in the current body of knowledge. Section 3 explains the systematic review process in detail. It covers the formulation of research questions, literature search strategies, and criteria for inclusion and exclusion. It also describes the procedures for selecting studies, techniques for extracting data, and methods used to validate the selected articles. Section 4 explores dynamic modeling techniques, highlighting their importance in developing accurate control systems. Section 5 reviews the latest advancements in nonlinear control methods specifically utilized in exoskeleton robot control applications. These methods are categorized into Computed Torque Control, Adaptive Control, Robust Control, Optimal Control, and Intelligent Control Systems, with a focus on their roles in enhancing performance, stability, and user adaptability. Section 6 presents an intuitive discussion of the findings, analyzing the strengths and limitations of various control techniques. Section 7 outlines future directions, offering insights into potential advancements and research opportunities in light of the reviewed literature. Finally, Section 8 concludes the article, summarizing key takeaways and emphasizing the implications for the development of efficient, responsive, and patient-centered rehabilitation exoskeletons.
2. Current Review
The field of rehabilitation robotics has seen significant advancements in recent years, particularly in the development and application of control strategies for exoskeleton systems. These control techniques are critical for improving human-robot interaction, enhancing patient engagement, and optimizing rehabilitation outcomes. Various reviews have provided insights into control strategies for specific applications, such as lower limb rehabilitation, upper limb rehabilitation, and telerehabilitation, each offering unique perspectives and highlighting areas for further exploration. The following section introduces readers to these existing review articles, establishing the context and identifying gaps to define the scope and contributions of this article.
The review article "Control Strategies for Effective Robot-assisted Gait Rehabilitation: The State of the Art and Future Prospects" explores control strategies for robotic gait rehabilitation [1]. It focuses on trajectory tracking and assist-as-needed (AAN) control. Trajectory tracking follows predefined motion paths, a method adapted from industrial robotics but criticized for limiting motor learning. AAN control, on the other hand, dynamically adjusts robotic assistance based on real-time user needs. It encourages active participation and fosters motor recovery. The review emphasizes clinical studies, assessing the effectiveness of these strategies in rehabilitation.
An advantage of the article is its detailed analysis of both fundamental and advanced control strategies. It includes bio-cooperative control methods that are influenced by user feedback like muscle activity and interaction forces. It integrates clinical evidence and provides a robust foundation for implementing these strategies in practice. Additionally, the article highlights emerging technologies such as patient-specific adaptation and cognitive human-robot interaction. It also covers master-slave control, where one machine acts as the master, and the other blindly follows its commands. Collaborative control is another topic discussed. Where robots participate in collaborative environment. Assist in tasks like drilling by carrying the weight of the drill and maintaining rigidity for accurate operation. Additionally, the article explores rehabilitation exoskeleton robot control techniques. These include passive rehabilitation, where the robot follows a set trajectory, and active modes like assist-as-needed control.
However, the article has limitations. It focuses on specific patient populations, like stroke and spinal cord injury patients. This restricts the generalizability of its findings. Practical implementation in routine clinical settings receives less emphasis. The study leans heavily on mechanical and algorithmic aspects, paying little attention to psychological and motivational factors. It lacks long-term follow-up studies to confirm the sustained benefits of robotic gait rehabilitation. Advanced strategies, like patient-cooperative control, require high computational resources, making them less feasible for standard healthcare settings. Some reviewed clinical trials have limitations, such as small sample sizes and lack of double-blind designs, which may affect the reliability of their outcomes. It does not emphasize low-level or high-level control algorithms.
The article provides a comprehensive overview of current control strategies in robotic gait rehabilitation, emphasizing the potential of AAN approaches. Despite its narrow focus on treadmill systems, it is a valuable resource for advancing control strategies in rehabilitation robotics.
The article “Exploring Challenges and Opportunities of Wearable Robots: A Comprehensive Review of Design, Human-Robot Interaction and Control Strategy” examines wearable robotics [2]. It focuses on Supernumerary Robotic Limbs (SRL) and exoskeletons for mobility and rehabilitation assistance. It explores current design approaches, control strategies, and human-robot interaction techniques. The review highlights SRLs for task augmentation and exoskeletons for aiding motor-impaired individuals. Key advances include adaptive control methods, ergonomic designs, and multi-modal human-machine interfaces. The review also identifies challenges like balancing system lightness with performance and improving compliance control strategies.
This paper specifies detailed coverage of technical and functional aspects of wearable robots. It provides insights into diverse applications, from industrial settings to medical rehabilitation. Its discussion on future directions, such as integrating advanced sensors and embodied intelligence, offers a forward-looking perspective. It includes practical challenges like achieving optimal human-robot coordination and the need for adaptive, user-friendly designs.
The article offers a comprehensive overview of wearable robotics. The major limitations of this article are that the discussion on clinical validations is limited, which reduces its applicability in real-world medical scenarios. Despite some gaps in application-specific details, it effectively bridges technical advancements with emerging trends, guiding future development in the field.
The article “Control Strategies for Active Lower Extremity Prosthetics and Orthotics: A Review” by Tucker et al. examines advancements in active prosthetics and orthotics (P/Os) aimed at enhancing mobility for individuals with lower limb impairments [3]. It reviews control strategies, including activity mode recognition, volitional control, and hierarchical control frameworks. The study emphasizes integrating human motion intentions with robotic control through sensors and adaptive algorithms. It introduces a generalized framework to align P/O control with the user’s sensory-motor system. This promotes seamless interaction between humans and devices.
The article’s strength lies in its thorough examination of both control challenges and opportunities in active P/Os. It highlights innovative techniques like activity mode recognition using machine learning and the integration of volitional and environmental sensing for precise motion assistance. The proposed framework and classification of controllers offer a practical guide for future research, emphasizing safety and human-robot cooperation.
This article has several limitations. It focuses more on theoretical frameworks than on real-world validations. In terms of control, it emphasizes human-machine interfacing using physiological signals, such as EMG signals. For P/Os control, it primarily covers finite state machine-based systems. While finite state machines are simple and effective for managing different states of variables, the article does not address low-level or high-level controllers. It also lacks coverage of advanced control algorithms, focusing instead on integrating physiological signals with finite state machines.
In conclusion, the article effectively outlines the current state of control strategies for active P/Os. Despite its limitations, it serves as a valuable resource for advancing the integration of robotics with human sensory-motor systems in rehabilitation technology.
The article “A Review on the Application of Intelligent Control Strategies for Post-Stroke Hand Rehabilitation Machines” focuses on advancements in hand rehabilitation robots designed to aid post-stroke recovery [4]. It discusses intelligent control strategies and their role in integrating bioelectrical signals to predict motor intentions and stimulate neuroplasticity. The review emphasizes combining theoretical rehabilitation principles with adaptive control methods to improve the user experience. It also examines commercially available hand rehabilitation robots. It provides an overview of their design features, control strategies, and future development trends.
One advantage of this article is its thorough discussion of bioelectrical signal integration, such as electromyography (EMG) and electroencephalography (EEG). This integration enables real-time intention recognition and supports personalized, adaptive rehabilitation. The inclusion of practical applications and commercial examples strengthens its relevance for researchers and developers. Furthermore, the emphasis on neuroplasticity as a rehabilitation mechanism underscores the scientific basis of its recommendations.
The article has several limitations. While its title suggests a focus on the application of intelligent control strategies for hand rehabilitation machines, the emphasis is primarily on the theoretical basis of hand rehabilitation in stroke and the use of intelligent control systems based on signal types. The author categorizes signals into two types: bioelectric signals, derived from the human body (physiological signals), and non-biological signals, sourced from various sensors.
The article titled “Control Method of Upper Limb Rehabilitation Exoskeleton for Better Assistance: A Comprehensive Review” provides an extensive overview of control strategies for upper limb rehabilitation exoskeletons [5]. It categorizes control methods into high-level modes, including passive, active, and assist-as-needed (AAN) modes, and low-level controllers designed to ensure accurate trajectory tracking and safe human-robot interaction. The review highlights challenges in exoskeleton control, including complex dynamic models, unknown disturbances, and motion intention recognition. It also explores practical solutions such as sliding mode control, impedance control, and the use of machine learning techniques for adaptive responses.
A major advantage of this article is its systematic classification of control methods and their alignment with different rehabilitation stages. It bridges theoretical principles with practical applications, discussing innovations such as multimodal sensing and machine learning for dynamic adjustments. The inclusion of a detailed analysis of bioelectric signals and human-robot interaction enhances its relevance for developing patient-specific rehabilitation systems. Furthermore, it provides insights into integrating ergonomic design with control strategies, which is critical for user comfort.
In conclusion, this article serves as a valuable resource for understanding control strategies in upper limb rehabilitation exoskeletons. While it effectively covers technical advancements, more attention to practical implementation and user-centric evaluations would enhance its impact.
The article titled "Lower Limb Exoskeleton Robot and Its Cooperative Control: A Review, Trends, and Challenges for Future Research" provides a comprehensive review of control strategies for lower limb exoskeleton robots, focusing on human-robot cooperative control (HRCC) and recent advancements in this field [6]. It explores the integration of physiological and biomechanical signals to enhance user intent recognition and highlights multi-information fusion techniques as a trend for improving control precision. The review also discusses challenges in developing adaptive and user-friendly systems, including issues with real-time data processing, safety, and robustness during human-robot interaction.
The main advantage of the article is its detailed discussion on combining bioelectrical signals such as EMG and EEG with other interaction metrics like ground reaction forces to refine motion intention detection. This fusion of signals enhances accuracy and adaptability, making exoskeletons more responsive to user needs. The article also outlines various control algorithms, such as impedance and admittance controls, and their applications in rehabilitation and daily activities.
The primary limitation of this article is its narrow focus on control systems, as it primarily emphasizes collaborative control techniques such as impedance control and admittance control. Additionally, it limits its scope to EEG and EMG signal-based triggering methods. This excludes other potentially valuable control strategies.
The article “Review of Adaptive Control for Stroke Lower Limb Exoskeleton Rehabilitation Robot Based on Motion Intention Recognition” provides an overview of adaptive control strategies used in lower limb exoskeletons for stroke rehabilitation [7]. The review highlights the importance of integrating motion intention recognition to enhance real-time interaction and adaptive assistance. It categorizes methods into kinematic, kinetic, and multimodal approaches, focusing on how sensors like inertial measurement units (IMUs), surface electromyography (sEMG), and electroencephalography (EEG) are used to capture user intentions. The study also emphasizes the role of machine learning algorithms in improving accuracy and responsiveness.
One advantage of this review is its detailed classification of motion intention recognition techniques and their application in adaptive control models. It highlights the integration of multi-source data, including biomechanical and physiological signals, as a key trend. The paper explains how these approaches enhance rehabilitation outcomes through personalized, real-time adjustments. It also addresses challenges like muscle fatigue and suggests solutions such as multimodal data fusion.
The major limitations of this article are: It lacks detailed experimental validations with stroke patients, relying heavily on simulations and healthy subject data. The challenges of implementing these strategies in clinical settings, such as cost and complexity, are underexplored.
The article offers valuable insights into adaptive control strategies for rehabilitation exoskeletons. It effectively outlines the potential of motion intention recognition but would benefit from more practical evaluations and discussions on real-world applications.
The article “Myoelectric Control Systems for Upper Limb Wearable Robotic Exoskeletons and Exosuits-A Systematic Review” examines state-of-the-art myoelectric control systems for upper limb exoskeletons and exosuits [8]. It focuses on the use of surface electromyography (EMG) signals to detect motion intentions. This enables better adaptability and human-robot interactions during tasks. The review categorizes control methods into threshold-based, proportional, biomechanical model-based, machine learning-based, and neural-fuzzy systems. It discusses design features like degrees of freedom, portability, and the intended application scenarios, alongside experimental validations.
The main advantage of the article is its thorough analysis of EMG-based control strategies. It highlights their ability to provide timely and accurate motion intention detection, crucial for both rehabilitation and augmentation applications. The inclusion of experimental validations strengthens its relevance. It shows how these systems perform in real-world conditions. Furthermore, the article emphasizes advanced machine learning techniques and adaptive control strategies for improving multi-degree-of-freedom motion tracking.
The article provides valuable insights into myoelectric control systems, emphasizing their potential to enhance upper limb rehabilitation and augmentation. Future research should focus on clinical trials, cost-effective designs, and strategies to improve long-term usability for diverse user groups.
The article titled "Review of Control Strategies for Lower-Limb Exoskeletons to Assist Gait" provides a detailed classification of control strategies for lower-limb exoskeletons, which focuses on their implementation, advantages, and limitations [9]. These strategies are organized into high-level, mid-level, and low-level controls. High-level controls govern device behavior, such as mode switching and terrain adaptation. These controls use methods like manual input, brain-computer interfaces (BCIs), and terrain identification. Manual inputs are straightforward but increase cognitive load. In contrast, BCIs improve automation but tend to be slow and error prone.
Mid-level controls manage continuous device behavior, such as gait synchronization and torque computation. Techniques like adaptive frequency oscillators (AFOs) and impedance control enhance user-device synergy. AFOs are robust and adapt to gait variations but are less effective in non-periodic motion, while impedance control promotes active user participation but requires precise tuning. Neuromuscular models mimic human systems for natural interaction but are complex and challenging to implement.
Low-level controls interact directly with actuators, employing position and torque control. While position control ensures precise movement, it limits flexibility. Torque control offers better adaptability but requires accurate force estimation.
The systematic review titled “Effectiveness of Intelligent Control Strategies in Robot-Assisted Rehabilitation” examines the use of intelligent control systems to enhance outcomes in robot-assisted rehabilitation [10]. These strategies include genetic algorithms, fuzzy logic control, adaptive controllers, learning control, and neural networks, all of which demonstrate significant potential in improving motion tracking accuracy, system robustness, and adaptability to patient needs. The review emphasizes the importance of optimization and learning techniques in enhancing patient engagement and customizing interventions. It presents a strong argument for integrating these advanced methods into rehabilitation robotics.
Despite these advancements, the review identifies key limitations. Most notably, a lack of studies involving impaired participants creates challenges in validating the effectiveness of these strategies in real-world rehabilitation contexts. Additionally, the absence of standardized evaluation metrics and comparative studies across different control techniques limits the ability to draw definitive conclusions about their relative benefits. This lack of standardization further complicates the assessment of these technologies, making it difficult to generalize findings across rehabilitation settings.
The review also notes significant gaps in addressing patient-centric concerns, such as safety, comfort, and engagement, which are crucial for successful therapy. Furthermore, minimal practical solutions are provided for challenges related to integrating intelligent control systems into real-world scenarios. The exclusion of traditional control strategies, such as linear and nonlinear methods, restricts the review’s scope, preventing a comprehensive comparison across the full spectrum of available approaches.
The lack of experimental evidence to demonstrate the superiority of intelligent systems over traditional rehabilitation methods underscores the need for future research. Long-term studies involving impaired participants and participant feedback are essential to enhance therapy design. The review concludes that while intelligent control strategies offer substantial promise, further research is needed to develop adaptive, targeted, and patient-centered solutions to enable their practical adoption in clinical settings.
The article titled “Review of control methods for upper limb telerehabilitation with robotic exoskeletons” offers a detailed analysis of control strategies for upper limb telerehabilitation using robotic exoskeletons [11]. It focuses on the unique challenges of upper limb rehabilitation, which demands higher precision and complexity compared to lower limb therapy.
The review highlights the growing need for telerehabilitation technologies, driven by demographic changes and the COVID-19 pandemic, which underscored the importance of remote rehabilitation. Telerehabilitation uses telecommunication technologies to provide therapy remotely. This enables continuous patient-therapist interaction without physical presence. This approach helps address geographical and logistical barriers.
The article explores various control methods for telerehabilitation, such as Proportional-Integral-Derivative (PID), impedance, admittance, adaptive control, and sliding mode control. It categorizes these methods into passivity-based strategies, such as wave transformation and time-domain passivity control (TDPC), that ensure stability during communication delays. Non-passivity-based strategies, including four-channel architecture and adaptive robust control, are also addressed. However, it does not cover all linear and nonlinear control strategies, which is a notable limitation.
The review identifies key challenges, including the immaturity of assistive robotics, high costs, and dependence on internet connectivity. It recommends focusing on simpler, affordable robotic systems with fewer degrees of freedom to improve portability and accessibility for home use. Additionally, it emphasizes the need for better control methods to address uncertainties in human interaction and manage communication delays for improved stability and performance.
While the article provides valuable insights, it has limited real-world applicability since many technologies are still in early development stages. The lack of standardized experimental protocols further complicates the evaluation of these systems.
The article titled “Control strategies used in lower limb exoskeletons for gait rehabilitation after brain injury: a systematic review and analysis of clinical effectiveness” provides an in-depth analysis of control strategies for lower limb exoskeletons used in gait rehabilitation after brain injuries [12].
It reviews 159 studies, emphasizing assistive control strategies such as rule-based algorithms and trajectory-tracking control. The review highlights that these strategies are primarily applied to stroke patients, with significant variability in clinical validation methods and outcome metrics. The authors highlight that combining trajectory-tracking with compliant control works best for acute stroke patients. For subacute stroke patients, threshold-based algorithms using EMG metrics are more effective.
However, the article has a significant limitation. It focuses narrowly on lower-limb rehabilitation following brain injury, excluding conditions like cerebral palsy and traumatic brain injury. It also omits other exoskeleton types, such as those for upper limbs or full-body support. This limits the applicability of its findings to a broader range of neurological impairments.
Additionally, the review lacks a standardized framework for comparing control strategies, making it difficult to evaluate their relative effectiveness. The absence of unified outcome metrics further complicates the ability to determine optimal strategies for specific patient groups. While the article emphasizes the importance of adaptive and personalized control strategies, it provides limited practical guidance on integrating advanced technologies, such as neural networks or brain-computer interfaces, to improve motion control and user adaptability.
The article by Yao et al. presents an in-depth review of sensor technologies and control strategies for lower-limb rehabilitation exoskeletons [13]. It emphasizes their potential to revolutionize mobility for individuals with movement disorders. The review meticulously analyzes 100 articles, focusing on various sensing modalities such as electromyography (EMG) and force sensors, alongside advanced control algorithms that enhance motion control and human-robot interaction. The authors identify significant advancements in sensor integration and user-centered design, yet highlight persistent challenges in stability, sensing methods, and the need for broader subject testing.
A notable limitation of this review is its exclusive focus on lower-limb exoskeletons, neglecting control strategies applicable to both upper and lower limbs. This narrow scope limits the generalizability of the findings. Additionally, the review lacks real-world applicability, as many devices remain in early development stages with limited testing on individuals with motor disabilities. The absence of standardized experimental protocols across studies further complicates the comparison of effectiveness. While the review discusses sensor integration and control strategies, it overlooks the potential of neural networks to enhance motion control and personalized therapy.
The article emphasizes the importance of personalized rehabilitation and real-time feedback but provides minimal practical solutions for challenges related to force transmission, control, and ergonomics. Future research recommendations are broad, stressing the need for more targeted clinical trials and real-world testing to facilitate the practical adoption of these exoskeletons.
The article titled “A Review on Upper Limb Rehabilitation Robots” provides an in-depth review of robotic exoskeletons and rehabilitation technologies, with a primary focus on upper limb rehabilitation for patients with motor impairments [14]. Key examples like ARMin, CADEN-7, and L-EXOS are discussed and their features, control methodologies, and clinical applications are highlighted. The review concludes that EMG driven robots demonstrate superior performance over passive systems in rehabilitation. It underscores the significance of precise torque estimation and the utilization of EMG signals to facilitate movement.
However, the article has several limitations. It does not encompass control strategies for all limbs, such as lower limbs. It restricts its applicability to a broader spectrum of rehabilitation needs. Additionally, the review does not address rehabilitation exoskeletons. The lack of standardized experimental protocols across studies complicates the comparison of effectiveness, and the article offers minimal practical solutions for challenges related to force transmission, control, and ergonomics. While it discusses the importance of user experience and portability, specific strategies for enhancing these aspects are absent.
The article titled " Review on Patient-Cooperative Control Strategies for Upper-Limb Rehabilitation Exoskeletons" investigates the intricacies of control strategies designed to enhance motor recovery in patients utilizing exoskeletons [15]. It introduces a three-tier classification system encompassing high-level training modalities, low-level control strategies, and hardware-level implementations. This framework aims to optimize rehabilitation outcomes by customizing assistance to the unique needs of each patient. The review emphasizes the significance of adaptive control methods, such as impedance and admittance control, in facilitating effective human-robot interaction and aiding motor relearning.
However, the article has several limitations. It primarily focuses on upper-limb rehabilitation, overlooking control strategies for lower limbs or other body parts, which narrows its scope. The discussion is largely theoretical, with limited empirical data or clinical validation to support the proposed strategies. Many of the technologies discussed are still in the experimental phase and lack real-world application and validation.
The article also fails to explore the potential of advanced neural networks, such as convolutional neural networks (CNNs) and recurrent neural networks (RNNs), in improving control accuracy and personalization. Additionally, it does not adequately address hardware challenges, such as actuator performance and sensor limitations, which are essential for effective implementation. While it suggests directions for future research, these recommendations are broad and lack specific, actionable strategies. The discussion on patient-specific adaptation is minimal, offering few practical solutions for managing individual variability and fostering patient engagement.
The article titled “Control Method of Upper Limb Rehabilitation Exoskeleton for Better Assistance: A Comprehensive Review” offers a detailed overview of control strategies for upper limb rehabilitation exoskeletons [16]. It emphasizes the integration of advanced machine learning techniques to enhance rehabilitation outcomes. The review covers various control methodologies, including sliding mode control (SMC), adaptive control, and neural networks, while highlighting the importance of multimodal data integration to improve the precision and effectiveness of training. Additionally, it explores the potential of active assistive control modes, which are essential for enabling patient-driven movement and effective rehabilitation.
Despite its thorough coverage, the article has several limitations. It focuses primarily on upper limb rehabilitation, neglecting control strategies for lower limb exoskeletons. Although it provides extensive discussion on machine learning applications, it lacks detailed insights into practical challenges, such as computational requirements and the need for large datasets. While the review stresses the importance of human-robot interaction, it gives limited attention to patient-specific variability and safety concerns. The proposed directions for future research are broad and lack actionable strategies for practical implementation. Furthermore, the article overlooks the potential of advanced neural networks, such as convolutional neural networks (CNNs) and long short-term memory networks (LSTMs), to enhance adaptability and personalization in rehabilitation protocols.
By reviewing the existing Review articles, it has been revealed that most of the existing review articles emphasize human-robot interfaces rather than the underlying control techniques implemented in rehabilitation exoskeletons. These articles frequently focus on interfacing mechanisms and the use of physiological signals, such as EMG, EEG, and ECG, to facilitate interaction. While some reviews explore intelligent control systems and others address rehabilitation-focused applications, limited attention has been given to conventional model-based control methods in conjunction with intelligent control systems. This research article aims to address this gap by systematically examining both conventional control techniques and intelligent control systems for rehabilitation exoskeleton robot control. A systematic review was conducted by collecting articles from multiple databases, applying stringent inclusion and exclusion criteria to ensure relevance and quality. The selected articles were reviewed to provide a comprehensive analysis of advancements and challenges in this domain. The following section outlines the article selection methodology employed in this review.
3. Methodology
This systematic review followed a structured and comprehensive approach to examine the application of various neural network models in exoskeleton-based robot-assisted upper extremity rehabilitation. The review process was conducted in five distinct stages: defining the research questions, identifying relevant studies, selecting studies based on inclusion and exclusion criteria, extracting data, and analyzing the findings.
3.1. Research Question Formulation
The primary research question guiding this review was: " How are various control systems utilized in exoskeleton-based rehabilitation robots?" Sub-questions included examining the types of control systems used, their effectiveness, and the challenges they address in rehabilitation technologies.
3.2. Literature Search Strategy
A systematic search was conducted using several electronic databases, including PubMed, IEEE Xplore, Scopus, and Web of Science. The search terms included combinations of keywords such as "computed torque control", "exoskeleton", "robot-assisted rehabilitation", "computed torque control”, “Robust Control", "Sliding mode control", and "Linear Control". The search was limited to articles published in peer-reviewed journals and conference proceedings between 2014 and 2024. To ensure thorough coverage, both backward and forward citation tracking of selected articles was performed.
3.3. Inclusion and Exclusion Criteria
Studies were included if they met the following criteria:
- -
- Rehabilitation exoskeleton robots
- -
- Proposed a novel control system.
- -
- Dynamic Simulation or Prototype testing on human subjects.
- -
- Published within the period of 2014-2024.
Exclusion criteria were:
- -
- Soft robotics
- -
- Papers not applying novel control system in rehabilitation processes.
- -
- Reviews, editorials, or commentaries without empirical data.
3.4. Study Selection
After conducting the database searches, duplicates were removed, and the titles and abstracts of the remaining studies were screened by two independent reviewers. Full-text articles were then assessed for eligibility based on the inclusion and exclusion criteria.
Disagreements between reviewers were resolved through discussion or a third reviewer when necessary.
3.5. Data Extraction and Synthesis
For the selected studies, data were extracted on the following parameters: type of control system, rehabilitation application, type of exoskeleton, advantages, key outcomes, and limitations. A qualitative synthesis was performed to analyze the findings and categorize the neural network applications based on their functionality and impact on rehabilitation.
3.6. Quality Assessment
The quality of the included studies was evaluated using a modified version of the Newcastle-Ottawa Scale, specifically adapted to assess the methodological rigor and relevance of control system used in rehabilitation research.
3.7. Data Analysis
The findings were synthesized to provide a comprehensive overview of the Advances in Control Techniques for Rehabilitation Exoskeleton Robots.
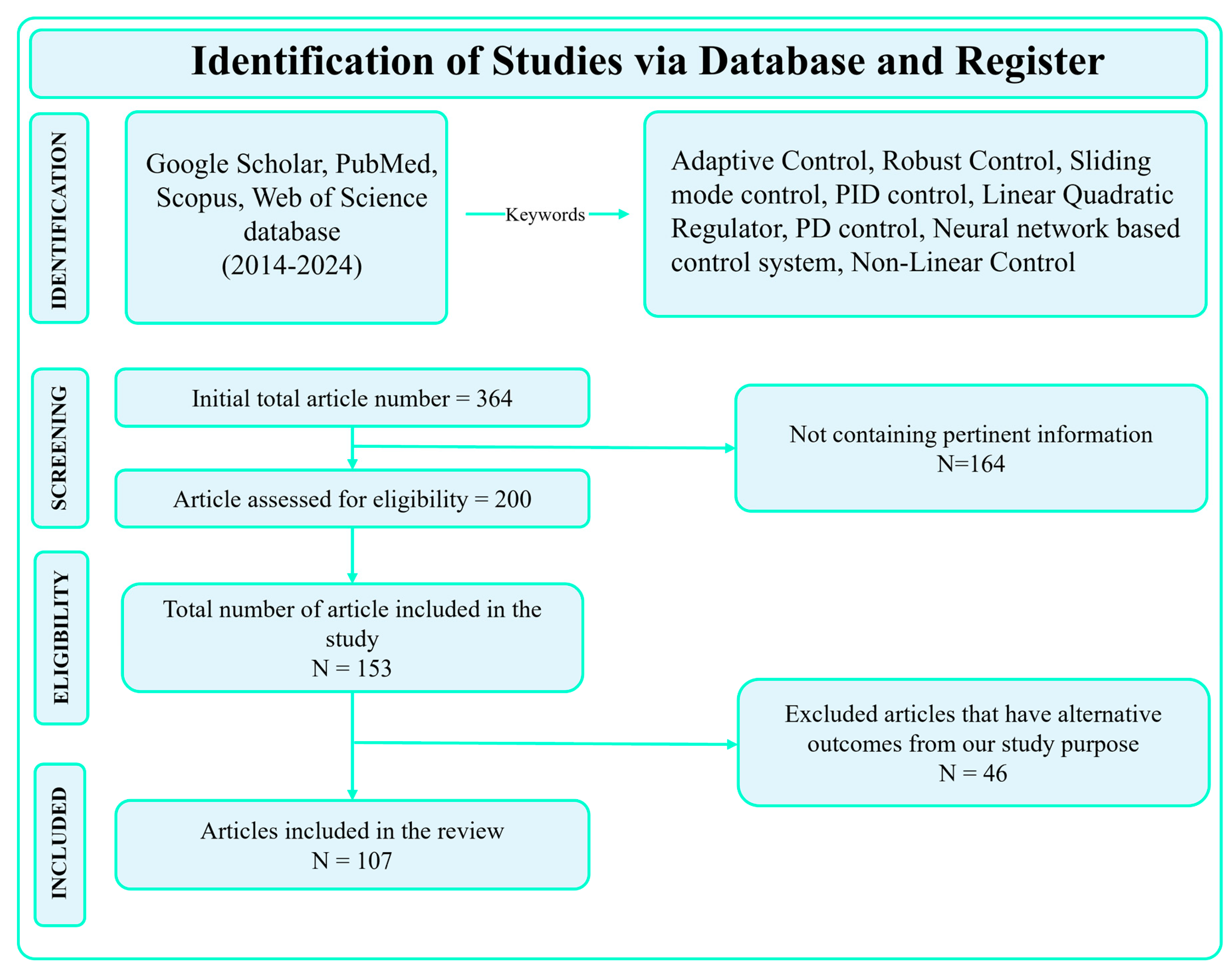
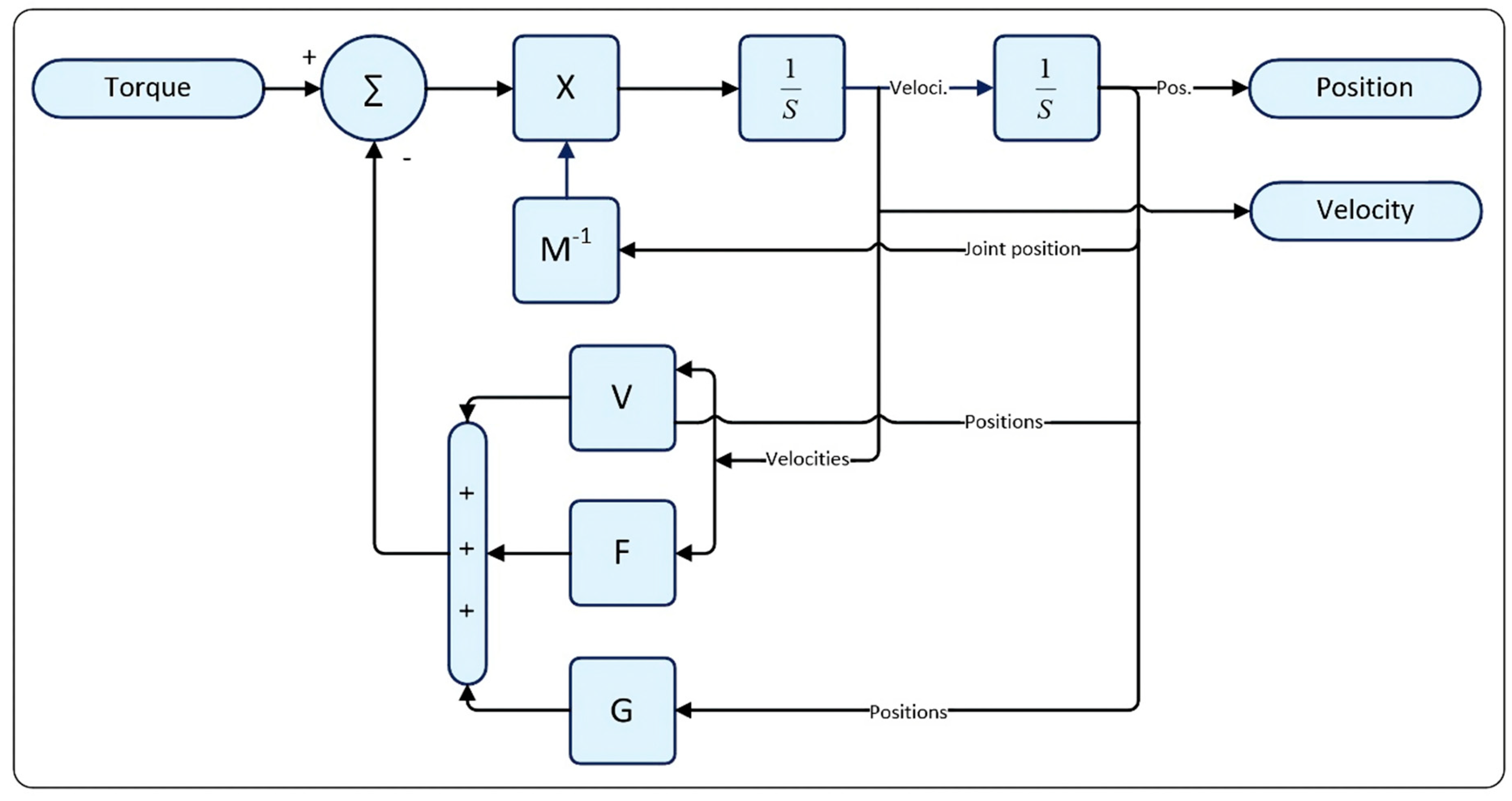
Figure 1.
Flow Chart of the Search and Inclusion Process.
4. Robot Dynamic Modeling
Robot dynamics are inherently nonlinear. Due to the nonlinear nature of these dynamics, it is recommended to use nonlinear control systems for robot control. Most conventional nonlinear control algorithms rely on a model-based approach, where the dynamics of the robot form an integral part of the control algorithm. The key advantage of model-based control systems lies in their ability to separate different components of the dynamic model.
Two popular methods for developing robot dynamic models are LaGrange method and Newton Eulers method. The Newton-Euler method is a classical approach based on Newton's second law of motion and Euler's rotational dynamics. The Lagrange energy method is an analytical approach that uses the principle of conservation of energy to derive the equations of motion for a dynamic system [17]. In the case of robots, the primary components of robot dynamics include Coriolis and centrifugal forces, gravitational forces, and the mass matrix. Often advanced friction models are used to predict the joint friction phenomena [18]. Separating these components specifically gravitational forces and Coriolis and centrifugal forces enables the linearization of the nonlinear system.
Figure 2 illustrates the internal architecture of a robot dynamic model. From the diagram, it is evident that the total torque used to move the robotic manipulator is distributed among several factors: accelerating the links , compensating for gravitational forces , countering Coriolis and centrifugal forces , and overcoming friction matrix) at mechanical joints. A dynamic model allows for the decomposition of the mass matrix, gravitational forces, Coriolis and centrifugal forces and friction. This decomposition facilitates linearization of nonlinear dynamics, enabling the design of a linear control system for the linearized model.
Accurate dynamic model is crucial because model-based control relies on the robot's dynamics to formulate control algorithms. If the dynamic model is inaccurate, the control system will lack the required precision and accuracy.
Dynamic models help to linearize the nonlinear system and at the same time develop different types of control algorithms and tune them to maximize the performance. Even non-model-based control systems can be benefited from the dynamic model by setting up the controller gains. By selecting inappropriate controller gains system may become unstable. Dynamic models and associated simulation help to protect from instability of the system.
Figure 2.
Robot dynamics including the friction model.
5. Overview of Robot Control System
A robot control system is the central mechanism responsible for robot's actions and behaviors. It enables the robot to interact effectively with its environment, adapt to changes as needed. In rehabilitation robots, the control system plays an even more critical role, as it governs the robot's interactions with human users, ensuring safety, responsiveness, and support throughout the rehabilitation process. The control system is responsible for regulating the robot's movements, adjusting speed, force, and trajectory to achieve desired tasks. In exoskeleton robots, control systems ensure precise and safe movements that match the user’s needs, which is critical in rehabilitation scenarios. Control systems typically involve feedback loops, where sensors continuously monitor the robot's position, force, and environmental changes, allowing real-time adjustments to movement.
To meet the complex demands of human-robot interaction, modern control systems integrate multiple types of controllers, including adaptive, robust, and intelligent controls. These varied approaches enable the exoskeleton to respond smoothly to different physical conditions or levels of user mobility. For example, adaptive control can adjust for a patient’s shifting strength, while robust control ensures stability even with external disturbances. More advanced control systems also incorporate machine learning, allowing the robot to learn from each session and refine its assistance over time. This multifaceted approach ensures that exoskeleton control systems can deliver precise, responsive, and supports each individual’s rehabilitation needs.
5.1. Non-linear Control System
Non-linear control systems play a crucial role in managing exoskeleton robots, especially given the complex, unpredictable nature of human movement. Unlike linear systems, which assume proportional responses, non-linear control systems can handle the dynamic and variable forces involved in human-robot interaction, allowing the exoskeleton to respond more naturally and effectively to the user’s actions. This capability allows exoskeletons to adapt in real-time to changes in movement and force. By accounting for these complexities, non-linear control systems enable a smoother, more intuitive interaction between the exoskeleton and the user.
Non-linear control techniques, such as sliding mode control and adaptive control, allow the exoskeleton to adjust its behavior based on real-time feedback and external disturbances, such as a sudden change in the user’s movement or strength. Sliding mode control, for example, is effective for maintaining stability despite external disruptions, helping the exoskeleton maintain precise support. Adaptive non-linear control systems are also valuable, as they adjust to each user’s unique biomechanics and gradually refine assistance based on ongoing interactions. This adaptability enhances comfort, safety, and efficiency in rehabilitation exercises. By using non-linear control, exoskeleton robots can provide a more intuitive and supportive experience, shaping assistance to each user’s needs and fostering better recovery outcomes. The following section will discuss the various types of nonlinear control schemes commonly used in exoskeleton robot control.
5.1.1. Computed Torque Control
Computed Torque Control (CTC) is a model-based control technique widely used in exoskeleton robots to achieve precise trajectory tracking and smooth, responsive movement. This control method uses the robot’s dynamics to compute the exact torques required at each joint to achieve the desired position and orientations. By effectively “linearizing” the robot’s nonlinear dynamics, CTC transforms complex, nonlinear control challenges into simpler linear ones, making it easier to achieve accurate, predictable control. This capability is particularly valuable in rehabilitation applications, where precise and stable movements are critical to safely supporting users through exercises or mobility tasks.
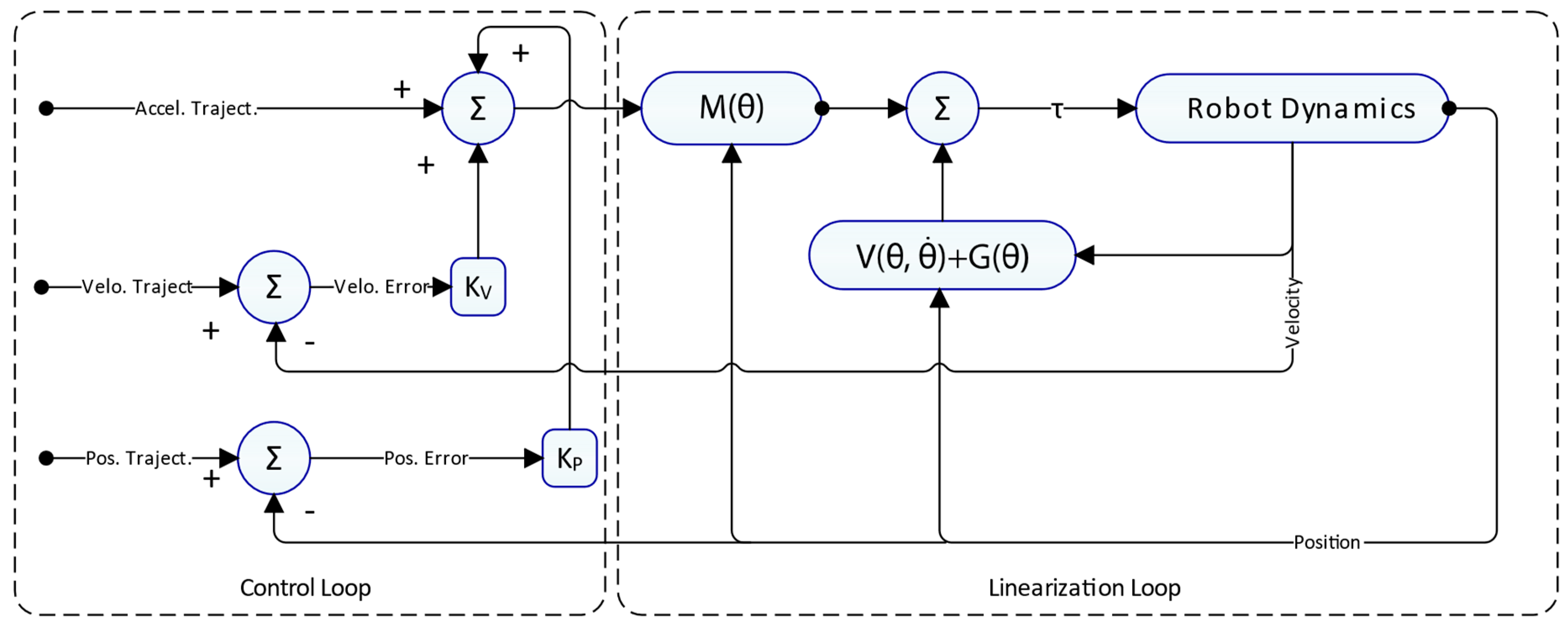
Figure 3 shows the architecture of the computed torque control scheme. It consists of two loops. Linearization loop is responsible for removing the nonlinear effects due to gravity and Coriolis and centrifugal effects. Control loop provides the required controlled input to the plant for achieving the desired performance and maintain system stability.
CTC relies heavily on the accuracy of the robot's dynamic model, as it calculates torques based on assumptions about factors like inertia, friction, and the external forces acting on the exoskeleton. When the model closely matches the actual dynamics of the exoskeleton and the user’s interaction, CTC can deliver highly accurate control, ensuring smooth movement and consistent support. However, this dependency on model accuracy can be a limitation; if there are discrepancies between the model and real-world interactions, control performance may degrade. To address this, CTC is often combined with adaptive or robust control techniques that enhance resilience to modeling inaccuracies, ensuring reliable support in diverse rehabilitation scenarios. The following section will discuss the exoskeleton robot controller based on the computed torque controller.
The paper “Time-delay Estimation Based Computed Torque Control with Robust Adaptive RBF Neural Network Compensator for a Rehabilitation Exoskeleton” presents a control system for a 12-degree-of-freedom lower limb exoskeleton designed for rehabilitation [19]. The system combines time-delay estimation (TDE) with computed torque control (CTC) and a robust adaptive radial basis function neural network (RBFNN) compensator.
The control strategy aims to improve tracking accuracy and robustness against unknown dynamics and disturbances, common in human-exoskeleton interactions. The TDE component compensates for time delays and uncertainties, ensuring precise control of movements. The RBFNN approximates unknown dynamics and addresses errors from the TDE process, providing a robust mechanism for accurate trajectory tracking.
Lyapunov theory validates the system's stability, confirming asymptotic stability where errors converge to zero over time. Co-simulation experiments demonstrate the effectiveness of the proposed system. Results show it outperforms traditional CTC and methods like sliding mode control, with improved stability, reduced tracking errors, and shorter settling times in gait trajectory tracking.
The TDE-RBFNN controller effectively handles modeling deviations and interaction forces, making it a strong candidate for rehabilitation applications. This study advances robotics and rehabilitation by introducing a sophisticated control system that integrates advanced estimation and compensation techniques, offering a reliable solution for developing more effective exoskeletons.
The paper “Adaptive RBF Neural Network-Computed Torque Control for a Pediatric Gait Exoskeleton System: An Experimental Study” introduces an adaptive radial basis function neural network-computed torque control (ARBFNN-CTC) scheme for a pediatric gait exoskeleton designed to handle uncertain model parameters and external disturbances in rehabilitation [20]. This control system aims to enhance gait tracking by estimating unknown dynamics and providing robust compensation.
The exoskeleton is tailored for children aged 8-12 and features three active joints (hip, knee, and ankle) with safety-specific ranges of motion. The human-exoskeleton system's dynamics are modeled using the Euler-Lagrange principle to calculate joint torques. The ARBFNN-CTC scheme shows significant improvements over traditional computed torque control (CTC), with tracking accuracy enhancements of 37.5% to 40.98% across all joints. Its adaptive nature allows the system to adjust to dynamic uncertainties and disturbances, making it suitable for pediatric rehabilitation.
The study emphasizes personalized gait training and calls for research on diverse pediatric subjects. Lyapunov stability proof ensures system stability, and experimental results confirm the ARBFNN-CTC’s effectiveness in precise gait tracking and rehabilitation.
The integration of motion capture technology enhances movement tracking and guidance during therapy, reinforcing the potential of the ARBFNN-CTC approach for consistent and effective gait training in pediatric subjects. This control strategy offers a promising solution for improving rehabilitation outcomes in pediatric exoskeleton systems.
The paper “Computed Torque Control of the Stewart Platform with Uncertainty for Lower Extremity Robotic Rehabilitation” proposes a robust control strategy for a six-degree-of-freedom Stewart platform designed to improve rehabilitation for patients with diabetic neuropathy [21]. The study addresses uncertainties in patient characteristics, such as variations in foot mass, which can affect control system performance.
Figure 3.
Computed Torque Control Architecture.
To manage these uncertainties, the authors combine Polynomial Chaos Expansion (PCE) with the Computed Torque Control Law (CTCL). CTCL, a feedback linearization technique, simplifies the Stewart platform's nonlinear dynamics into a linear ordinary differential equation (ODE). Proportional-derivative (PD) controllers ensure stability and maintain the platform's trajectory, essential for effective rehabilitation.
PCE models uncertainties by projecting stochastic responses onto orthogonal polynomial bases. This method systematically evaluates generalized driving forces and accommodates parameter variations. Integrating PCE with CTCL enables the system to handle uncertainties while maintaining desired performance levels.
The study compares the PCE-based approach with the traditional Monte Carlo method. Simulation results show that PCE is more efficient and accurate, producing similar mean values with lower standard deviations. Additionally, PCE significantly reduces computation time (64.08 seconds versus 95.30 seconds for Monte Carlo).
The PCE-integrated CTCL effectively controls the Stewart platform under uncertain conditions, delivering improved accuracy and efficiency. This innovative strategy enhances robotic rehabilitation systems and offers a reliable solution for managing uncertainties in various robotic applications.
The paper “Modified Computed Torque Control of a Robotic Orthosis for Gait Rehabilitation” explores a modified computed torque control strategy for a two-degree-of-freedom (2-DOF) robotic orthosis designed for gait rehabilitation using pneumatic artificial muscles (PAMs) [22]. The study focuses on improving trajectory tracking to ensure safety and comfort during rehabilitation.
The authors propose a control algorithm that incorporates fractional-order derivatives to enhance performance in transient and steady-state conditions. This approach addresses the limitations of conventional Proportional-Derivative (PD) controllers, achieving faster stabilization and lower root mean square tracking errors (RMSTEs) for hip and knee joints.
A detailed mathematical model of the robotic system, including the dynamics of the orthosis and a bi-articular muscle, forms the foundation for the control algorithm. This model ensures an accurate representation of system behavior. Experimental tests with multiple subjects validate the strategy, demonstrating its effectiveness and robustness. The system achieved acceptable maximum tracking errors (MTEs) and RMSTEs across different users, confirming its reliability.
The study highlights the advantages of PAMs in rehabilitation robotics, emphasizing their smooth and responsive assistance. The authors suggest testing the control system on neurologically impaired patients to assess safety and therapeutic benefits. This work underscores the importance of advanced control algorithms in improving rehabilitation technologies and encourages further innovation.
The paper “Adaptive Computed Torque Control Based on RBF Network for a Lower Limb Exoskeleton” presents a control system for a 12-degree-of-freedom (DOF) lower limb rehabilitation exoskeleton [23]. Traditional computed torque control (CTC) methods often face challenges in accurately modeling exoskeleton dynamics due to uncertainties and unmodeled factors. To address these limitations, the authors propose an adaptive control strategy using radial basis function (RBF) neural networks. This approach estimates and compensates for unknown dynamics, enhancing the control system's robustness and adaptability.
The study utilizes MATLAB/Robotics Toolbox (RTB) for dynamic modeling and SolidWorks for prototype design. Co-simulation experiments show significant performance improvements, with tracking errors reduced to the order of The adaptive CTC method with RBF networks achieves precise motion control across multiple joints, even in the presence of dynamic uncertainties.
The paper is structured into sections on virtual prototype design, problem formulation, estimation and compensation methods, and concluding remarks. The virtual prototype is designed in SolidWorks, focusing on the physical properties of the exoskeleton. The problem formulation outlines the shortcomings of traditional CTC methods, while the estimation and compensation section explain the integration of RBF neural networks into the control system.
The research demonstrates a robust and adaptive control system for lower limb exoskeletons, offering improved motion control through RBF neural networks. Co-simulation results validate the effectiveness of the proposed approach, showing minimized tracking errors and enhanced system stability.
The paper “Feedback Control Design for Robust Comfortable Sit-to-Stand Motions of 3D Lower-Limb Exoskeletons” discusses the design and optimization of feedback control systems for a 3D lower-limb exoskeleton. It focuses on robust and comfortable sit-to-stand and sit-to-crouch-to-stand transitions [24]. The authors use a quadratic programming (QP)-based computed torque controller to manage exoskeleton dynamics while adhering to constraints like joint limits, motor torque bounds, and contact forces.
This nonlinear control strategy optimizes motor and user effort by incorporating constraints on torso angles and knee positions to ensure user comfort. The study formulates motion generation as a constrained optimization problem, deriving joint trajectories and motor torques based on user characteristics such as weight, height, and chair dimensions. System robustness is tested against perturbations, including zero user force and knee joint spasticity.
The results show that both Set-Point (SP) and State Update (SU) controllers maintain stability and performance under various conditions. A key feature is the use of virtual constraints, which are dynamically adjustable to support effective feedback control without altering physical connections. These constraints enable smooth transitions between sitting and standing.
The paper highlights the importance of optimizing exoskeleton movements for user comfort and safety. Success criteria include minimal tracking errors, adherence to torque limits, and compliance with friction constraints. The findings demonstrate that the proposed control system can accommodate diverse users and conditions, offering specific benefits for different motion types. The methodology is adaptable to other exoskeleton designs and motions, advancing rehabilitation technology and robotic assistance.
The article titled "A Realistic Model Reference Computed Torque Control Strategy for Human Lower Limb Exoskeletons" presents a novel control system designed to improve the performance of exoskeleton robots used for rehabilitation [25]. These robots assist individuals with mobility impairments and demand precise, reliable control for effective therapy. The proposed control system, the Realistic Model Reference Computed Torque Controller (RMRCTC), addresses challenges arising from nonlinear dynamics and uncertain parameters in robotic-human interaction.
The study begins by establishing a comprehensive 7-degree-of-freedom (DOF) dynamic model for the exoskeleton robot. This model incorporates human-like biomechanics and a detailed friction model that captures Coulomb friction, viscous effects, and the Stribeck phenomenon. By using this realistic representation, the RMRCTC ensures accurate simulation of real-world joint resistances and improves the reliability of the control system.
Unlike traditional computed torque controllers (CTC), which are sensitive to inaccuracies in dynamic modeling and computationally expensive, the RMRCTC introduces several optimizations. The control algorithm is divided into two loops to enhance efficiency and stability. The slower loop calculates joint torque requirements based on reference trajectories and system dynamics, running at 100 Hz. The faster loop employs a proportional-integral-derivative (PID) controller to correct trajectory tracking errors, operating at 1 kHz. This dual-loop design reduces the computational load while maintaining high tracking accuracy.
The RMRCTC also excludes Coriolis and centrifugal forces from the dynamic model. These forces have a minimal impact on overall system dynamics but require significant computational power to calculate. By treating these forces as disturbances, the controller achieves a substantial reduction in computational demands and energy consumption, improving the robot's real-time response capabilities.
The Realistic Model Reference Computed Torque Controller offers a practical and efficient solution to the challenges of exoskeleton control, combining computational efficiency with high tracking accuracy. Simulation results validate the effectiveness of the proposed control system. The RMRCTC delivers excellent trajectory tracking performance with minimal errors. It outperforms traditional methods, including standard CTC, by demonstrating robustness against modeling discrepancies and parameter uncertainties. The controller adapts well to variations in user-specific parameters, such as weight and height, ensuring consistent performance across diverse rehabilitation scenarios.
The Table 1 summarizes the articles discussed in this section:
The next section will discuss the recent advancements of adaptive control system for rehabilitation exoskeleton applications.
5.1.2. Adaptive Control
Adaptive control in exoskeleton robots is essential for providing personalized and responsive assistance to users. The adaptive control adjusts its parameters in real time, accommodating changes in the user's movements, strength, and interaction dynamics. This capability is critical in exoskeletons used for rehabilitation, where patients may exhibit varying levels of mobility, muscle tone, or fatigue during each session. Adaptive control enables the exoskeleton to customize its support, offering a seamless experience that aligns with the user's current capabilities and needs.
The adaptive control system constantly monitors the user's actions through sensors and modifies its response to match these inputs accurately. For instance, if a user unexpectedly changes speed or force, the adaptive control system can adjust the exoskeleton’s output to maintain stability and comfort. Additionally, adaptive control enhances safety by quickly responding to irregularities, reducing the risk of injury. Often, adaptive control is paired with machine learning techniques, allowing the exoskeleton to refine its responses based on accumulated data over multiple sessions. This adaptability not only improves the effectiveness of rehabilitation but also supports a more natural, intuitive interaction between the user and the exoskeleton, ultimately fostering more consistent and meaningful recovery progress.
The article “Impedance Learning-Based Hybrid Adaptive Control of Upper Limb Rehabilitation Robots” presents a hybrid adaptive control (HAC) strategy aimed at improving human-robot interaction (HRI) in upper limb rehabilitation robots [26]. The approach addresses challenges posed by uncertainties in dynamic modeling and human impedance variations.
The proposed control system combines impedance learning with adaptive control mechanisms. It uses a differential updating mechanism to estimate parametric uncertainties and a periodic adaptation mechanism to learn time-varying human impedance. This hybrid approach ensures asymptotic stability and regulates variable impedance without requiring force measurements.
Key components of the control system include feedforward forces, stiffness, and damping matrices, which enhance tracking performance by compensating for dynamic changes in the HRI environment. The control law manages tracking errors and estimates time-varying impedance profiles, keeping estimation errors uniformly bounded and ensuring that tracking errors converge to zero over time.
The system effectively handles non-linear relationships and detects subtle changes in human impedance or movement patterns. This is achieved through adaptive mechanisms that estimate parameters such as feedforward force, stiffness, and damping using periodic learning laws. The effectiveness of the control strategy is validated theoretically through the analysis of a non-negative function, demonstrating that estimation errors remain finite and continuous over specified intervals.
The HAC strategy is tested through simulations and experiments on a planar five-bar parallel mechanism. Results show significant improvements over traditional adaptive control methods, particularly in tracking accuracy and stability. This approach offers a robust solution for enhancing the performance of upper limb rehabilitation robots.
Cai et al. proposed a Compensation-Corrective Adaptive Control (CCAC) strategy for robotic systems designed to assist individuals with upper limb impairments [27]. The study addresses challenges related to compensatory movements, which hinder effective rehabilitation. The control system dynamically adjusts robotic assistance to reduce trunk compensation and enhance motor performance.
The CCAC system integrates an admittance model, a human intention estimator, and dynamic assistance estimators. The admittance model provides necessary assistance, the human intention estimator interprets user movements, and the dynamic assistance estimators make adjustments to minimize trunk compensation. These components work together to ensure tailored and effective support during rehabilitation.
Experiments involved healthy participants performing reaching tasks, with simulated weak muscles using springs. The tasks were tested under various conditions, including reference-free, no assistance, and robotic assistance. Metrics such as trunk compensation angles, upper-limb position error, movement smoothness, and joint angles were used to evaluate motor performance. Statistical analysis with SPSS showed a significant increase in trunk compensation under constrained conditions compared to reference conditions.
The proposed control system reduced trunk compensation by over 60% in various tasks, including forward-and-back, side-to-side, and up-and-down movements. Improved motor performance was demonstrated through reduced position errors and increased joint angles. The adaptive control system allows robotic exoskeleton to provide personalized support, enhancing the effectiveness of rehabilitation.
Future research aims to apply this strategy to stroke patients and refine the robotic system based on user feedback, further improving its rehabilitation potential.
The paper “A Muscle Synergy-Inspired Control Design to Coordinate Functional Electrical Stimulation and a Powered Exoskeleton” introduces a hybrid neuroprosthesis combining functional electrical stimulation (FES) and powered exoskeleton technology to assist individuals with spinal cord injuries (SCI) in gait restoration [28]. At the core of this system is an adaptive synergy-based controller that simplifies and coordinates complex movements using muscle synergies—groups of muscle fibers activated together.
The controller integrates feedback strategies to manage muscle activation and joint trajectories. A finite-state machine (FSM) manages different gait states and transitions, optimizing the coordination between electric motors and muscle stimulation for effective locomotion. The adaptive control algorithm addresses challenges such as electromechanical delay, activation dynamics, and muscle fatigue.
Experimental results highlight improved tracking performance and reduced energy consumption compared to traditional approaches. The paper also explores optimization techniques, including principal component analysis, to identify artificial muscle synergies. This reduces the dimensionality of control inputs while maintaining performance.
Additionally, the optimization framework enables the design of subject-specific gait trajectories, offering lightweight and personalized rehabilitation solutions. The study demonstrates the potential of this approach to enhance the efficiency and effectiveness of gait rehabilitation for individuals with SCI.
Han et al. developed a rehabilitation leg exoskeleton designed to assist individuals, particularly hemiplegic patients, during gait training [29]. The exoskeleton features an adaptive control system composed of three key components: interaction torque, an inertia compensator, and assistive torque generated by an adaptive frequency oscillator (AFO).
The interaction torque component synchronizes the exoskeleton with the user’s natural gait by detecting and responding to user-applied forces. The inertia compensator mitigates weight and friction challenges, enabling smoother movement. The AFO adjusts to varying swing frequencies, tailoring assistance to the user’s active motion. This adaptability ensures the exoskeleton meets each user's specific needs.
The exoskeleton is constructed using lightweight materials and a cable-driven mechanism to reduce physical strain on the user. The paper highlights potential future research directions, including enhancing frequency adaptation capabilities and integrating EMG activation measurements for improved performance and personalization.
The paper titled "An Adaptive Controller for Human Lower Extremity Exoskeleton Robot" focuses on developing an effective control system for robotic rehabilitation exoskeletons [30]. These exoskeletons assist individuals with lower limb impairments by providing precise, customizable therapy. The study highlights the challenges of controlling such systems, particularly due to the nonlinear dynamics and variability in human limb properties like mass and inertia.
To address these challenges, the researchers developed a 7-degrees-of-freedom (DOF) dynamic model of the human lower extremity using the Newton-Euler method. This model accounts for the complexities of joint motions and includes a friction model based on Coulomb friction, viscous effects, and the Stribeck phenomenon. These features enable the exoskeleton to simulate realistic interactions with the human limb.
The paper introduces a direct adaptive controller designed to manage these dynamics and ensure accurate trajectory tracking. Adaptive controllers are particularly suited for systems with uncertain parameters, such as human limb variability. This controller adjusts to parameter changes using real-time feedback and ensures system stability through adaptive gains derived from the Lyapunov stability approach. Unlike conventional controllers, the adaptive scheme does not require precise knowledge of system parameters, making it robust against uncertainties.
The adaptive control strategy leverages a regressor matrix, a key component in handling nonlinearities. The controller adapts to dynamic variations, maintaining stability and accuracy even in the presence of disturbances like joint friction. By considering 31 system parameters for adaptation, the control design ensures comprehensive system response to real-world variations. The use of Lyapunov-based stability guarantees makes the control approach theoretically sound and practically reliable.
Simulation results validate the effectiveness of the controller. The system demonstrated excellent trajectory tracking, even under high-friction scenarios. Parameters such as torque and power requirements were analyzed, and results showed efficient use of energy while maintaining precise movement. The parameters of the robot dynamically converged during operation, indicating the system's adaptability and stability.
Pan et al. designed a lower-limb rehabilitation exoskeleton to assist individuals with mobility impairments [31]. The exoskeleton weighs less than 16 kg and features four degrees of freedom per leg, covering the waist, hip, knee, and ankle. It includes a stepless adjustable mechanism to enhance user comfort and accommodate different heights.
A notable feature of the exoskeleton is its multi-axis self-tuning control system, which manages motor operations for walking gait. The system employs vector pulse width modulation for a three-phase inverter and motor control. Using Clarke and Park transformations, it converts three-phase currents into direct and quadrature reference frames. Controller gains are dynamically adjusted based on motor current signals, optimizing performance and maintaining stability during varying walking conditions.
The design incorporates powered hip and knee joints driven by motors and hydraulic devices. A master-slave motor-driven setup ensures precise gait control. Preliminary tests captured walking data without the exoskeleton to refine the control strategies. Comparisons between conventional PI controllers and the proposed self-tuning controller showed improved tracking performance and reduced errors in hip and knee movements.
Wang et al. propose an Adaptive Interaction Torque-Based Assist-As-Needed (AITAAN) control strategy for lower-limb rehabilitation exoskeletons [32]. At the core of this strategy is a Nonlinear Disturbance Observer (NDO) that estimates the wearer's muscle torque. This estimation enables the exoskeleton to dynamically adjust its assistance, ensuring the support is appropriately tailored and neither excessive nor insufficient.
The control system uses a computed torque control (CTC) approach to calculate the required input torque for rehabilitation. A flexible boundary Proportional-Integral-Derivative (PID) controller ensures accurate trajectory tracking. The research focuses on converting the interaction torque tracking problem into a trajectory tracking problem, allowing the control system to prioritize precise movement paths.
Co-simulation experiments validate the effectiveness of the proposed strategy, demonstrating its ability to provide precise assistance based on the wearer’s muscle strength. The controller achieves smaller tracking errors and enhances rehabilitation outcomes. The paper also discusses the mechanical design and dynamic modeling of the exoskeleton, incorporating stiffness and damping coefficients, which are critical for implementing the control strategy accurately.
The paper “Switched Concurrent Learning Adaptive Control for Treadmill Walking Using a Lower Limb Hybrid Exoskeleton” introduces an adaptive control strategy for a powered lower limb exoskeleton to assist individuals with spinal cord injuries during treadmill walking [33]. The exoskeleton combines cable-driven motors with functional electrical stimulation (FES) to activate muscles and facilitate movement.
At the core of the system is a switched concurrent learning adaptive controller designed to handle the nonlinear and uncertain dynamics of human-exoskeleton interactions. This controller provides torque assistance to the hip and knee joints while managing gait phase transitions through a phase-dependent switched system. It also activates muscles using FES.
Experimental treadmill trials with nondisabled participants show that the concurrent learning controller outperforms traditional adaptive controllers. It reduces kinematic tracking errors by 22.6% and accelerates parameter convergence. Results highlight improved joint kinematic tracking, with reduced root mean square (RMS) errors during trials with concurrent learning. Additionally, shorter stimulation pulses help minimize muscle fatigue, offering potential benefits for long-term use.
The stability analysis focuses on the stance and swing phases of the right leg. Using multiple Lyapunov methods and dwell time conditions, the study ensures stability under slow switching conditions. Exponential kinematic tracking is demonstrated for each phase, with specific dwell time conditions required during transitions.
The concurrent learning adaptive control strategy improves hybrid exoskeleton performance. However, future research should address limitations such as the exclusion of the double-stance support phase and evaluate robustness against muscle fatigue and external disturbances. This work underscores the potential of advanced control strategies in enhancing rehabilitation technologies.
The paper “Medical Exoskeleton ‘Remotion’ with an Intelligent Control System: Modeling, Implementation, and Testing” describes the development and implementation of a lower limb medical exoskeleton designed for rehabilitating patients with mobility impairments, including those with spinal cord injuries [34]. The exoskeleton integrates an intelligent control system that includes electric drive control, a human-machine interface, and walking pattern control, all managed by a 32-bit STM32 microcontroller.
The control system ensures precise movement using feedback sensors and an inertial navigation system, allowing the exoskeleton to replicate natural human gait patterns. A key feature is the adaptive drive control, enabling the exoskeleton to handle complex tasks and adapt to varying conditions. The user-friendly human-machine interface supports control via touchscreen or voice commands, enhancing accessibility for patients with limited mobility. Safety features, such as pressure sensors and emergency shutdown mechanisms, are included to prevent falls.
The paper also covers the mathematical modeling of human gait, essential for simulating locomotion. A kinematic model of biped gait, developed using sensor data, accurately represents hip and shin angles during the step cycle. Testing on a stationary treadmill validated the modeling accuracy and parameter adjustments. Telemetry data showed effective operation, though minor inconsistencies in movement consistency were observed.
The paper “Gait Deviation Correction Method for Gait Rehabilitation with a Lower Limb Exoskeleton Robot” introduces the Gait Deviation Correction Method (GDCM), a novel control system designed for lower limb exoskeletons to improve gait rehabilitation, particularly for stroke patients [35]. Traditional exoskeletons often struggle to align the user's gait with a reference trajectory due to challenges like flexible connections and compliance control strategies. The GDCM addresses these limitations by using an ensemble of decision trees to predict human joint angles based on body parameters such as height and weight.
The model is trained using clinical gait analysis (CGA) curves and participant gait data, then integrated into the exoskeleton's control system to adjust input trajectories dynamically. Performance metrics, including the coefficient of determination (R²), mean absolute deviation (MAD), and peak angle differences, were used to evaluate the system. Results show significant improvements in hip and knee joint angle tracking. After applying the GDCM, the maximum and minimum joint angles aligned more closely with the CGA curve, and MAD for both joints was significantly reduced.
These findings suggest that the GDCM effectively minimizes gait deviations, enhancing rehabilitation outcomes. The study highlights the impact of body parameters on gait deviation and recommends future research to expand the dataset and investigate ankle gait deviations.
The paper “Generically Optimized Parameter Estimation of Mathematical Model for Multi-Joints Hip-Knee Exoskeleton” focuses on optimizing parameter estimation for a four-degree-of-freedom (DoF) hip-knee exoskeleton (HKE) using a Genetic Algorithm (GA) [36]. Accurate parameter estimation is essential for controlling multi-joint actuators due to their nonlinear behavior.
The authors develop a detailed mathematical model of the HKE, incorporating its electro-mechanical, mechanical, and electrical components. The model includes DC motor dynamics, with equations of motion derived using the Lagrangian method to calculate torques on the femur and tibia based on input voltage and joint angles. GA is employed to minimize errors between actual and simulated angular trajectories of the hip and knee joints. The objective function is based on the root mean square (RMS) error from experimental data.
The study compares GA with Particle Swarm Optimization (PSO), another optimization technique. While both methods provide satisfactory predictions, GA achieves greater accuracy in reducing trajectory errors. These findings demonstrate that GA-based optimization is effective for parameter identification and significantly aids in designing and validating control systems for lower limb exoskeletons.
The paper “Optimally Initialized Model Reference Adaptive Controller of Wearable Lower Limb Rehabilitation Exoskeleton” introduces an Incremental Model Reference Adaptive Controller (IMRAC) designed to assist individuals with mobility impairments caused by neurological conditions [37]. The IMRAC is optimized using Genetic Algorithms (GA) and Particle Swarm Optimization (PSO) to fine-tune controller gains, improving joint trajectory tracking and ensuring stability through Lyapunov stability theory.
The study compares the IMRAC with traditional Model Reference Adaptive Controllers (MRAC) and those initialized using the Ziegler-Nichols method. Results demonstrate that the IMRAC outperforms these methods in convergence speed and tracking error reduction. Experimental validation involved a healthy male participant walking with the exoskeleton for 78 seconds. The IMRAC, particularly when initialized with GA and PSO, exhibited faster convergence and lower tracking errors than conventional approaches.
Statistical analysis confirmed that the IMRAC achieved the lowest maximum error and root mean square error (RMSE), demonstrating its effectiveness in controlling angular trajectories for hip and knee joints. The research underscores the potential of optimized adaptive control strategies in improving rehabilitation exoskeleton performance, highlighting their promise for developing more effective assistive technologies.
The paper “Design and Single-Parameter Adaptive Fuzzy Control of Pneumatic Lower Limb Exoskeleton with Full State Constraints” presents a novel design and control strategy for a pneumatically actuated lower limb exoskeleton, focusing on safety and precision in gait training [38]. The exoskeleton is lightweight, utilizing pneumatic artificial muscles (PAMs) and a Bowden cable system to ensure compliance while minimizing weight.
At the core of the study is the Single-Parameter Adaptive Fuzzy Control (SAFC) method, which addresses uncertainties in dynamic modeling and ensures accurate trajectory tracking based on normal human walking patterns. The SAFC method employs a barrier Lyapunov function to maintain the exoskeleton's movements within safe constraints, offering lower computational costs compared to conventional adaptive fuzzy control methods. The paper provides mathematical derivations and Lyapunov stability proof to establish the stability and effectiveness of the SAFC method.
The control strategy is validated through numerical simulations and experiments with healthy subjects, demonstrating superior tracking performance compared to conventional PID controllers. These experiments include no-load conditions as well as passive and active gait training scenarios. The key contributions of the study include the innovative SAFC method, a lightweight exoskeleton design, and theoretical guarantees of stability and safety in the control process.
The Table 2 summarizes the articles discussed in this section:
The next section will discuss the application of robust control in rehabilitation exoskeleton robots.
5.1.3. Robust Control
Robust control in exoskeleton robots is a powerful technique designed to maintain stability and performance despite uncertainties, disturbances, or changes in the interaction dynamics. This approach is crucial in rehabilitation, where the robot must adapt to diverse users and unpredictable forces, such as sudden shifts in the user's movement or unexpected external loads. Unlike adaptive control, which adjusts parameters in real time, robust control is configured to handle a predefined range of uncertainties, ensuring that the exoskeleton can perform reliably even when faced with modeling inaccuracies or external disturbances.
The primary goal of robust control is to make the exoskeleton resilient to variations that could disrupt smooth operation or lead to safety concerns. For example, if a user with limited muscle strength suddenly leans into the exoskeleton, robust control can manage this extra force, maintaining balance and providing appropriate support without sudden jerks or movements. Common robust control methods, such as H-infinity control and sliding mode control, are particularly effective for ensuring stable performance across a range of challenging scenarios. By prioritizing stability and consistency, robust control enhances user safety and provides reliable experience, making it an ideal choice for rehabilitation tasks where user movements are often variable and unpredictable.
Brahmi et al. proposed a robust control strategy for a smart robotic exoskeleton (SREx) designed to assist in upper limb rehabilitation therapy, particularly for stroke survivors [39]. The control system is based on differential flatness, a method well-suited for nonlinear dynamic systems. Differential flatness transforms complex systems into a triangular flat canonical normal form, simplifying control design.
The study demonstrates that the SREx robot’s dynamics are differentially flat, enabling the system to be converted into a form suitable for precise control. This transformation facilitates the design of a control system that achieves asymptotic stability through exponentially stabilizing feedback. System stability is validated using the Lyapunov criterion.
Experimental evaluations highlight the flatness-based controller’s superior performance compared to a conventional computed torque controller (CTC). The flatness-based approach delivers better tracking of desired trajectories while requiring reduced control inputs. The paper also explores the geometric conditions for transforming systems into the flatness form, focusing on controllability and the application of Lie brackets in the analysis.
The article titled “Closed-Loop Kinematic and Indirect Force Control of a Cable-Driven Knee Exoskeleton: A Lyapunov-Based Switched Systems Approach” developed a control framework for a cable-driven knee exoskeleton [40]. This exoskeleton is designed to assist individuals facing movement challenges, including those recovering from neurological conditions. Its primary goal is to improve mobility while reducing the workload on physical therapists. A critical focus of the design is achieving precise knee joint tracking. Additionally, it aims to prevent cable slackness, which can negatively impact the system's performance.
The authors developed a two-layer control system. The high-level controller ensures the knee joint follows desired periodic trajectories, such as leg swings, using repetitive learning techniques. This approach controls the predictable nature of periodic movements to refine control with each cycle. The low-level controller manages the cable-driven system by adjusting motor actions to maintain proper cable tension and avoid counteracting forces.
The exoskeleton uses two electric motors connected to Bowden cables for bi-directional control of the knee joint. The motors alternate roles between "leader" and "follower." The leader motor focuses on achieving the desired knee movement, while the follower motor minimizes cable slackness by monitoring tension and adjusting accordingly. The control system incorporates admittance models, which use real-time cable tension feedback to guide the adjustments.
The experimental validation involved six able-bodied participants wearing the exoskeleton in a standing position. Results demonstrated that using cable tension feedback significantly reduced cable slackness, improved knee tracking, and minimized variability in control efforts. The advanced controller required lower input forces, enhancing safety and comfort.
This study highlights the importance of integrating tension feedback and learning-based control in exoskeletons to enhance performance. Future work includes extending the framework to multi-joint systems for walking and developing adaptive controls for user-specific adjustments. These advancements promise to improve rehabilitation technologies and expand their applicability in real-world settings.
The paper “Autonomous Locomotion Trajectory Shaping and Nonlinear Control for Lower Limb Exoskeletons” presents an advanced control strategy aimed at improving human-robot interaction (HRI) and personalizing locomotion in lower limb exoskeletons [41]. The approach utilizes adaptive central pattern generators (ACPGs) to adjust gait frequency and amplitude dynamically based on user interaction, ensuring real-time adaptability and compliance.
A key feature of the system is a time-varying bounded-gain adaptive disturbance observer, which estimates and compensates for interaction torques. This component is essential for both high-level gait generation and low-level trajectory tracking. The control framework is based on robust nonlinear control principles, with stability validated through Lyapunov analysis. The analysis shows that tracking and estimation errors converge to a compact region, ensuring reliable system operation.
The developed control law enables precise tracking of desired trajectories while compensating for estimated human torque, promoting smooth collaboration between the user and the exoskeleton. Experimental validation was conducted using the Indego exoskeleton with able-bodied participants. Results demonstrated significant improvements in gait parameters, including a 53% increase in locomotion frequency and a 15% increase in gait amplitude, highlighting the system's adaptability and effectiveness.
The paper “Robust Control of a Hip-Joint Rehabilitation Robot” introduces a novel control strategy for HipBot, a hip-joint rehabilitation robot, utilizing Generalized Proportional Integral (GPI) controllers [42]. This approach addresses challenges in rehabilitation robotics, particularly in achieving precise movement control for stroke recovery.
Dynamic modeling of the robot is performed using the Euler-Lagrange method, providing a mathematical framework to analyze interactions between the robot, the human body, and the environment. The GPI controllers are designed to manage structural nonlinearities, nonlinear friction, and parametric uncertainties, ensuring robust trajectory tracking despite unknown disturbances and dynamic changes. Bezier polynomials define the desired trajectories for rehabilitation exercises, while an impedance control strategy mimics the movements of a physiotherapist.
The effectiveness of the control system is evaluated through numerical simulations and experimental tests with healthy volunteers. Simulations demonstrate the GPI controllers' ability to reject disturbances and adapt to dynamic changes, resulting in minimal tracking errors. Experimental results confirm system stability and performance, even under varying weights and external forces. The use of GPI controllers reduces the need for multiple sensors, potentially lowering system costs.
The findings suggest that GPI controllers can enhance patient recovery and quality of life by improving rehabilitation outcomes. Future tests involving stroke patients are planned to further validate the control system in real-world scenarios. This research contributes to advancements in robotic rehabilitation technologies, offering a promising solution to challenges in the field.
The paper “Deterministic Adaptive Robust Control with a Novel Optimal Gain Design Approach for a Fuzzy 2-DOF Lower Limb Exoskeleton Robot System” proposes a deterministic adaptive robust control strategy for a two-degree-of-freedom (DOF) lower limb exoskeleton robot system (LLERs), designed to enhance rehabilitation training for stroke patients [43]. The control method uses a cooperative game theory framework to optimize control gain parameters, effectively addressing uncertainties and external disturbances.
The control strategy consists of three components: a servo constraint torque to manage initial tracking deviations, a compensatory term to handle system uncertainties, and an adaptive component to estimate unknown parameters. This structure ensures uniform boundedness of trajectory deviations and parameter estimation errors, significantly improving system robustness. Fuzzy set theory is applied to model uncertainties more effectively than traditional probability theory, providing a precise framework for addressing inherent system uncertainties.
The cooperative game theory framework optimizes control gains by resolving challenges posed by the strong coupling between control parameters. This approach leads to Pareto optimal solutions, improving overall system performance. The paper also describes the exoskeleton's dynamical modeling using the Euler-Lagrange method, highlighting the importance of consistent constraint satisfaction during operation.
Simulation results demonstrate the proposed method's superiority over classical linear-quadratic regulator (LQR) control, particularly in tracking desired gait trajectories and reducing control input fluctuations. The study emphasizes the deterministic nature of the control strategy, distinguishing it from traditional fuzzy control methods.
The paper “Design Control of a Series Elastic Actuator with Clutch for Hip Exoskeleton for Precise Assistive Magnitude and Timing Control and Improved Mechanical Safety” presents the development and control of a Series Elastic Actuator with Clutch (SEAC) for a hip exoskeleton to assist individuals with lower limb impairments [44]. The SEAC is designed for precise torque control and incorporates a mechanical clutch that disengages under excessive torque, ensuring safety and compliance in human-robot interactions.
The control system uses singular perturbation theory with flexibility compensation to enhance robustness and reject disturbances. By separating slow and fast time scales, this approach manages system dynamics for precise control. An adaptive controller with a projection algorithm addresses parameter drift, maintaining stability and accuracy in torque delivery.
The SEAC design includes an encoder-based torque sensor, a brushless motor driver, and a DSP chip for data acquisition and control. These components enable the system to deliver assistive torque during various walking phases, such as early-swing and stance phases. Experimental validation demonstrates the SEAC’s ability to provide assistive torque with minimal tracking errors. Tests confirm accurate torque tracking, and preliminary trials with human subjects validate its effectiveness in assisting walking activities.
Al-Awad et al. presents a rehabilitation knee exoskeleton controlled using fractional multi-loop active disturbance rejection control (FADRC) methods [45]. These exoskeletons enhance physical training by automating repetitive movements, improving therapy efficiency. However, control challenges arise from nonlinear dynamics, external disturbances, and parameter uncertainties.
The study evaluates three FADRC schemes. FADRC1 incorporates a fractional state observer (FSO), FADRC2 employs a fractional proportional-derivative controller (FPD), and FADRC3 combines these in a multi-loop structure. Simulations in MATLAB/Simulink assess their performance under noise disturbances.
FADRC3 demonstrates superior disturbance rejection and reduced tracking errors compared to FADRC1 and FADRC2. It delivers smoother control with minimal chattering by integrating fractional calculus into both feedback and feedforward loops. Performance metrics, including root mean square error (RMSE) and control effort (ISU), confirm its effectiveness. Without disturbances, FADRC3 achieves the smallest RMSE of 0.0039 radians, a 48% improvement over FADRC2. Under disturbances, it maintains robust control with an RMSE of 0.0091 radians.
The study highlights the advantages of fractional order components in enhancing robustness and precision. FADRC3 actively estimates and compensates for disturbances through fractional extended state observers, achieving superior stability and trajectory tracking. The research concludes that FADRC3 offers a promising approach for exoskeleton control, combining precision and adaptability.
Jiang et al. present the design and control of a three-degree-of-freedom (3DOF) lower limb rehabilitation robot (LLRR) aimed at assisting stroke patients with motor dysfunction [46]. The robot facilitates motion recovery through passive movement training and repetitive task-specific exercises, targeting the hip, knee, and ankle joints. Its adjustable design accommodates patients of different heights.
The LLRR employs an adaptive robust control strategy to handle system uncertainties and disturbances, including patient interaction forces. Its design incorporates a kinematic model, friction model, and motor model to ensure accurate trajectory tracking. The kinematic model captures joint dynamics, the friction model accounts for non-rigid component effects, and the motor model manages energy conversion from electrical to mechanical.
The control system includes two sub-controllers: an adaptive robust sub-controller to manage disturbances and a proportional-integral (PI) sub-controller to improve trajectory tracking accuracy. These controllers work together to regulate motor torque and maintain system stability. Experiments validate the LLRR’s ability to perform joint-specific training and gait training, demonstrating high trajectory tracking accuracy with minimal error and effective disturbance rejection.
The study emphasizes the importance of a physiologically safe design. Emergency stop mechanisms in both hardware and software protect patients from overexertion during training sessions. The adjustable exoskeleton and modular control system enhance the robot’s versatility, making it suitable for various rehabilitation needs.
The paper “Active Torque-Based Gait Adjustment Multi-Level Control Strategy for Lower Limb Patient Exoskeleton Coupling System in Rehabilitation Training” introduces a multi-level control strategy to enhance interaction between patients and rehabilitation exoskeletons by addressing the limitations of existing methods [47]. The approach emphasizes personalized rehabilitation through adaptive control mechanisms.
The control system consists of three layers. The high-level controller uses an Adaptive Central Pattern Generator (ACPG) to adjust the rehabilitation gait based on the patient’s active torque. This personalization increases difficulty as the patient’s muscle strength improves, ensuring engagement and effectiveness. The middle-level controller combines a Radial Basis Function (RBF) neural network and a Nonlinear Disturbance Observer (NDO) to estimate interaction and muscle torques. This robust control strategy manages uncertainties in patient dynamics, allowing the exoskeleton to adapt to variations in muscle strength accurately.
The low-level controller employs a Time Delay Estimation-based Prescribed Performance Model-Free Controller (TDE-PPMFC) for precise trajectory tracking. This ensures the exoskeleton follows the desired path while maintaining performance within predefined bounds. Stability is validated using the Lyapunov criterion, confirming that trajectory tracking errors for both the exoskeleton and the patient’s lower limbs remain bounded.
Simulation results, conducted with a twin-double pendulum model and co-simulation using SimMechanics, demonstrate the system’s effectiveness in adapting rehabilitation gait, estimating muscle torque, and achieving accurate trajectory tracking. Although the study provides promising simulation outcomes, future work will involve practical experiments with a prototype exoskeleton to further validate the controller’s performance. This research makes a significant contribution to robotic rehabilitation technologies.
The paper “Active Disturbance Rejection Control Based Human Gait Tracking for Lower Extremity Rehabilitation Exoskeleton” explores the use of Active Disturbance Rejection Control (ADRC) for improving the control of hip and knee joints in rehabilitation robotic exoskeletons [48]. The study focuses on assisting patients in walking by enhancing trajectory tracking accuracy and compensating for external disturbances.
The research includes a detailed mathematical model of the exoskeleton, covering input torque dynamics and the formulation of mass, Coriolis, and gravitational matrices. The ADRC approach employs an Extended State Observer (ESO) to estimate and mitigate disturbances, ensuring precise control. Desired gait trajectories are derived from Clinical Gait Analysis (CGA) to align with natural human walking patterns.
The ADRC strategy is compared to traditional Proportional-Integral-Derivative (PID) control using MATLAB simulations. Results show that ADRC outperforms PID, especially under disturbance conditions, by providing superior tracking accuracy. The study emphasizes the importance of tuning observer and controller bandwidths to optimize performance while managing noise tolerance.
Experimental validation with a healthy subject further confirms ADRC’s effectiveness. The root means square error (RMSE) results reveal significant improvements, with ADRC achieving a 73.4% reduction in hip joint errors and an 86.3% reduction in knee joint errors compared to PID control. The research provides valuable insights into optimizing control strategies and disturbance rejection in rehabilitation robotics.
The paper “Robust Tracking Control Design with a Novel Leakage-Type Adaptive Mechanism for an Uncertain Lower Limb Exoskeleton Robot” proposes an adaptive robust control strategy tailored for lower limb exoskeletons used in stroke rehabilitation [49]. This approach introduces a leakage-type adaptive mechanism that estimates uncertainties without requiring prior knowledge of their bounds. It overcomes the limitations of conventional adaptive controls. It assumes constant or slow time-varying uncertainties.
The control design treats gait following as a constraint control problem, ensuring that constraints remain uniformly bounded. The framework is supported by a set of assumptions and a theorem guaranteeing system stability. A Lyapunov function demonstrates the Uniform Boundedness (UB) and Uniform Ultimate Boundedness (UUB) of the system states. Mathematical derivations illustrate how the control law manages uncertainties while maintaining stability.
Simulations validate the control strategy, showing improved tracking performance under varying uncertainties compared to an active disturbance rejection control (ADRC) scheme. The results highlight the robustness and adaptability of the proposed approach. The study also emphasizes the importance of selecting appropriate parameters to optimize control performance. The findings underscore its potential to improve the effectiveness of passive rehabilitation training, advancing the field significantly. The Table 3 summarizes the articles discussed in this section:
The next section will discuss the recent advancements of sliding mode control systems for rehabilitation exoskeleton applications.
5.1.4. Sliding Mode Control
Sliding Mode Control (SMC) is a robust and nonlinear control strategy widely used in engineering and scientific applications due to its effectiveness in handling system uncertainties and external disturbances. This method is based on driving the system state trajectories onto a predefined sliding surface and maintaining them there for the remainder of the control process. The sliding surface is designed to achieve the desired system dynamics, ensuring stability and performance. SMC is characterized by its ability to switch control actions at high frequency, creating a discontinuous control signal that enforces the sliding motion. This switching mechanism makes SMC inherently robust to modeling inaccuracies and external perturbations, as it forces the system to "slide" along the surface where these effects are minimized. One of the key challenges associated with SMC is the chattering phenomenon, a high-frequency oscillation caused by the finite bandwidth of actuators and measurement noise. To mitigate chattering, various techniques have been developed, including boundary layer approaches, adaptive sliding surfaces, and higher-order sliding mode controllers. These advancements extend the applicability of SMC to systems with practical constraints. Due to its simplicity in design and strong robustness properties, SMC continues to be a focal area in control research, particularly in robotics, automotive systems, and power electronics.
Figure 4 shows the architecture of the sliding mode controller for robotics applications. Figure 5 shows the sliding mode controller with chattering suppressor. The following section will cover the recent advancement of the sliding mode controller for robotics applications.
The paper “Adaptive Neural Network-Based Practical Predefined-Time Nonsingular Terminal Sliding Mode Control for Upper Limb Rehabilitation Robots” introduces a novel control strategy tailored for upper-limb rehabilitation robots [50]. This approach addresses model uncertainties and external disturbances that often affect precise trajectory tracking in robotic systems.
The proposed method improves fixed-time terminal sliding mode control by ensuring predefined-time convergence without singularity issues. A novel sliding mode surface guides the system's trajectory to reach a sliding manifold within a specified timeframe, ensuring that tracking errors converge to a small neighborhood of the origin in another predefined period. This convergence is independent of control parameters.
A key feature of the strategy is the integration of Radial Basis Function Neural Networks (RBFNNs), which estimate and compensate for system disturbances. The RBFNNs adaptively adjust the controller’s response based on tracking errors, effectively approximating lumped disturbances. This reduces the required switching gain and minimizes chattering in the control signals. The adaptive weight update law ensures that the RBFNNs dynamically respond to environmental changes and user inputs.
Theoretical analysis confirms that tracking errors converge to the vicinity of the origin within the predefined time. Stability of the closed-loop system is verified using a Lyapunov function, demonstrating that all signals remain bounded, and the sliding mode surface converges to zero.
Simulations on two robotic systems-a two-joint single-arm robot and a 5-DOF upper-limb exoskeleton-validate the control system’s effectiveness. Results highlight the proposed strategy’s ability to enhance rehabilitation robots by providing precise, responsive, and reliable support, showcasing its potential for improving rehabilitation outcomes.
The paper “Extended State Observer-Based Nonlinear Terminal Sliding Mode Control with Feedforward Compensation for Lower Extremity Exoskeleton” presents an innovative control strategy for improving gait tracking in lower extremity exoskeletons [51]. Known as ESO-F-NTSMC, the method combines Extended State Observer (ESO) and Nonlinear Terminal Sliding Mode Control (NTSMC) with feedforward compensation to address internal and external disturbances effectively.
The ESO-F-NTSMC strategy leverages the robustness of sliding mode control and the disturbance estimation capabilities of ESO to enhance tracking performance. The system dynamics are modeled as a second-order multi-input multi-output (MIMO) system, with control laws designed for fast convergence and robustness. The control law ensures the tracking error and sliding surface converge to zero asymptotically, guaranteeing global stability.
Experimental tests with human volunteers validated the method, comparing it with traditional terminal sliding mode control (TSMC) and ESO-based TSMC. Results show that ESO-F-NTSMC significantly improves tracking accuracy, reducing root mean square errors (RMSE) and tracking errors for hip and knee joints. The control architecture integrates various sensors and a central controller, with safety mechanisms to protect users.
While the method achieves smoother movement and enhanced gait tracking, it requires extensive empirical parameter tuning. Future research will focus on online parameter adjustment, dynamic model identification using neural networks, and evaluating the metabolic cost of using the exoskeleton. This study demonstrates the potential of ESO-F-NTSMC to provide robust and adaptable solutions for rehabilitation exoskeletons, offering improved performance for diverse users.
The paper “Design and Implementation of a Robotic Hip Exoskeleton for Gait Rehabilitation” details the development and evaluation of a lightweight robotic hip exoskeleton, focusing on advanced control strategies to aid gait rehabilitation [52]. The exoskeleton supports active flexion/extension and passive abduction/adduction at the hip joints, designed to meet individual needs without requiring additional torque sensors.
The system employs a Linear Extended State Observer (LESO) to estimate user torque and manage dynamic uncertainties. This facilitates the implementation of a LESO-based Proportional-Derivative (PD) controller and a Sliding Mode Controller (SMC). The study compares three control strategies: Linear Active Disturbance Rejection Control (LADRC), LESO-based SMC, and LESO-based Fast Terminal Sliding Mode Control (FTSMC).
Experiments conducted at walking speeds of 0.15 m/s and 0.225 m/s reveal that the LESO-based FTSMC delivers superior tracking performance, particularly in reducing root mean square error (RMSE) of hip joint trajectories. The LADRC controller performed less effectively, especially at higher speeds. The exoskeleton was also tested during stair ascension tasks, where it showed better performance with two steps per stride.
The study emphasizes the importance of addressing disturbances such as spasms and tremors, which can temporarily increase tracking errors. Despite these challenges, LESO-based FTSMC maintained stability and robustness. The robotic hip exoskeleton demonstrates potential for improving gait function in rehabilitation by providing effective power assistance without significantly affecting ground reaction forces.
Further refinement and clinical trials are recommended to address challenges during faster walking and validate its effectiveness in clinical settings. This research highlights the promise of advanced control strategies in enhancing robotic rehabilitation technologies.
The paper “Study on the control algorithm for lower limb exoskeleton based on ADAMS/Simulink co-simulation” investigates the development and simulation of a lower limb exoskeleton using a sliding mode control (SMC) algorithm [53]. It employs ADAMS/Simulink co-simulation for real-time motion control. The exoskeleton model is built in ADAMS, while MATLAB handles control signal processing.
The SMC algorithm improves the exoskeleton's ability to track human walking gaits. This enhances wearer comfort and system reliability. Compared to traditional PID control, SMC offers faster response, greater stability, and better handling of system uncertainties and external disturbances. Accurate trajectory tracking ensures the exoskeleton aligns with the user’s natural gait, minimizing discomfort and reducing the risk of injury.
Experimental results show that the SMC-controlled exoskeleton significantly assists users. However, real-world challenges, such as nonlinearity and assembly errors, highlight the need for further refinement. The paper provides an overview of lower limb exoskeletons and existing control methods. It emphasizes the robustness of SMC against disturbances and its advantages in motion control.
The co-simulation approach combines mechanical and electrical simulations, optimizing the design and testing of the control algorithm. The study demonstrates SMC’s potential to enhance exoskeleton performance, paving the way for future advancements in human-machine cooperation and exoskeleton technology.
The article titled “Biomechanical design and control of an eight DOF human lower extremity rehabilitation exoskeleton robot” covers biomechanical design and nonlinear control of a lower extremity rehabilitation exoskeleton robot [54]. The exoskeleton features eight degrees of freedom, seven of which are actively actuated to replicate human lower limb movements accurately. A cam follower mechanism is integrated to replicate the complex motions of the knee joint, ensuring ergonomic and natural movement for effective rehabilitation. This design enables the robot to provide various forms of therapy, including active, passive, and assisted exercises.
A key focus of the study is the implementation of a robust control system using sliding mode control (SMC), known for its ability to manage nonlinear dynamics and disturbances. However, traditional SMC is prone to chattering-high-frequency oscillations that can destabilize the system and cause discomfort. To address this, the study incorporates a super twisting algorithm, which effectively suppresses chattering while preserving the robust performance of the control system. This enhancement enables precise and smooth trajectory tracking, critical for rehabilitation therapy.
The control system also addresses joint friction and external disturbances through a detailed friction model that includes Coulomb, viscous, and Stribeck effects. This comprehensive modeling ensures the control system can adapt to dynamic variations, delivering consistent performance in real-world conditions. By compensating for friction and other uncertainties, the exoskeleton maintains stability and reliability during operation, creating a safer and more effective therapeutic experience.
The exoskeleton is designed with patient comfort in mind. Lightweight materials and ergonomic configurations facilitate natural movement, enabling extended use during therapy sessions. Its versatility makes it suitable for patients at various stages of recovery, including early post-stroke rehabilitation when prompt intervention is crucial. This adaptability underscores the device’s potential to significantly improve therapy outcomes.
Simulation results validate the effectiveness of the control system. The integration of the super twisting algorithm eliminates chattering, ensures stability, and enhances the energy efficiency of the exoskeleton. The results demonstrate high precision in trajectory tracking and reliable operation under dynamic conditions, making it a promising advancement in rehabilitation technology.
The paper “Model-free finite-time robust control using fractional-order ultra-local model and prescribed performance sliding surface for upper-limb rehabilitation exoskeleton” proposes a new control strategy for upper-limb rehabilitation exoskeletons [55]. It focuses on achieving accurate trajectory tracking despite uncertainties and disturbances. The method, Fractional-Order Finite-Time Robust Control (FO-FTRC), uses a model-free approach. It combines fractional-order dynamics with a prescribed performance sliding surface, ensuring finite-time convergence to desired states while maintaining robustness.
FO-FTRC employs a multi-input multi-output (MIMO) fractional-order ultra-local model. This simplifies control by approximating the exoskeleton’s complex dynamics without requiring an accurate model. The control system includes key components such as a Fractional-Order Quasi-Time Delay Estimator (FO-QTDE) for estimating uncertainties and an Unknown Disturbance Estimator (UDE) to reduce estimation errors. A Proportional Sliding Mode Controller (PPSMC) ensures convergence within set performance limits.
The stability and convergence of the control system are evaluated using Lyapunov’s theorem. This analysis confirms that the sliding surface reaches zero within a finite time, stabilizing the system. Co-simulation and experiments on 7-degree-of-freedom (DOF) and 2-DOF exoskeletons validate the method’s effectiveness. Compared to other strategies, FO-FTRC shows faster convergence, higher tracking precision, and better robustness. These improvements are supported by lower Integral of Time multiplied by Absolute Error (ITAE) values.
In conclusion, FO-FTRC enhances tracking accuracy and robustness for upper-limb rehabilitation exoskeletons. It outperforms traditional control methods. Future research is suggested to address input nonlinearities.
The paper “Human gait tracking for rehabilitation exoskeleton: adaptive fractional order sliding mode control approach” presents a new control system for lower limb exoskeletons, focusing on improving gait tracking for hemiplegic patients [56]. The system uses the Adaptive Fractional Order Fast Terminal Sliding Mode Controller (AFOFTSMC). This controller provides high precision, fast response, and robust trajectory tracking.
AFOFTSMC handles uncertainties and disturbances through adaptive parameter adjustments. It employs a discrete dynamic model based on the Lagrange discretization criterion. The design includes fractional order operators, a sliding mode surface for quick convergence, and stability analysis via Lyapunov’s method. Mathematical proofs ensure the system remains stable, with errors converging to a bounded region.
Simulations using a MATLAB-OpenSim co-simulation platform confirm the controller’s effectiveness. AFOFTSMC outperforms Conventional Sliding Mode Control (CSMC) and Fast Terminal Sliding Mode Control (FTSMC) in trajectory tracking, error reduction, and robustness. The study highlights potential applications of AFOFTSMC in other areas, such as robotics and UAVs.
The article titled "Development of a Sliding Mode Controller with Chattering Suppressor for Human Lower Extremity Exoskeleton Robot" focuses on designing an advanced control system to address the challenges of robotic rehabilitation for individuals with lower limb disabilities [57]. This work centers on the application of a sliding mode controller (SMC), a robust nonlinear control technique, to achieve precise trajectory tracking and effective rehabilitation.
The study highlights the dynamic complexities of human lower extremity exoskeletons, which require robust control due to nonlinearities, friction, and disturbances inherent in their operation. A detailed dynamic model of a seven-degree-of-freedom lower limb exoskeleton was developed using empirical anthropometric data and included a comprehensive friction model. The friction model combines Coulomb, viscous, and Stribeck effects to accurately simulate joint resistance and improve control system realism.
A key focus of the research is addressing the phenomenon of chattering in sliding mode controllers. Chattering, caused by the high frequency switching inherent to SMC, results in mechanical wear, system inefficiency, and discomfort during rehabilitation exercises. To overcome this, the researchers incorporated a continuous mode chattering suppressor. This addition significantly reduced oscillations, allowing smoother and quieter operation while maintaining the robustness of the control system.
The control system was validated through dynamic simulations in a MATLAB environment. These simulations evaluated the controller’s performance in tracking sequential and simultaneous joint movements under varying conditions, both with and without the chattering suppressor. Results showed that the sliding mode controller with a chattering suppressor achieved superior performance, with reduced torque requirements and improved energy efficiency. The suppressor effectively minimized jerks and actuator saturation, enhancing both user comfort and the mechanical lifespan of the system.
In addition to demonstrating the advantages of the sliding mode controller with chattering suppression, the study compared its performance to conventional control methods, such as PID and computed torque controllers. While all controllers showed acceptable tracking accuracy, the sliding mode controller with a chattering suppressor outperformed others in terms of smoothness, robustness, and energy efficiency.
The paper “Design, development and control of a 2PRP-2PPR planar parallel manipulator for lower limb rehabilitation therapies” introduces ANKUR-LL II, a rehabilitation system for patients in sitting or lying positions [58]. The system features a compact, modular, and cost-effective 2PPR-2PRP planar parallel manipulator with enhanced workspace and stiffness.
It uses a non-singular fast terminal sliding mode control (NSTSMC) to handle uncertainties and disturbances. This approach ensures finite-time convergence and reduces control input chattering. A disturbance observer further strengthens control by estimating and compensating for uncertainties. The system’s kinematic and dynamic models, derived through the Euler-Lagrange method, are validated using MSC ADAMS simulations and integrated with Simulink.
Tests on a prototype with a passive serial RRR lower limb orthosis show effective tracking of clinically obtained gait trajectories. The system achieves errors within ±1°. NSTSMC outperforms traditional PID and computed torque control methods, delivering lower root mean square errors in joint tracking and control inputs.
ANKUR-LL II incorporates safety protocols, adjustable orthosis components, and a user interface for therapists, ensuring adaptability and patient safety. The study concludes that the system is well-suited for clinical applications. The Table 4 summarizes the articles discussed in this section:
The next section will discuss the application of fuzzy logic-based control methods in rehabilitation exoskeleton robots.
5.1.5. Fuzzy Logic-based Control System
A fuzzy logic-based control system is an intelligent control strategy that mimics human reasoning by employing a rule-based approach to handle imprecise, uncertain, or nonlinear systems. Unlike conventional control methods that require precise mathematical models, fuzzy logic control relies on linguistic rules and fuzzy sets to represent and process data. These systems interpret inputs using fuzzy membership functions, applying a set of "if-then" rules to determine outputs. The following section will introduce the recent advancements of Fuzzy Logic based control system in exoskeleton robot assisted rehabilitation applications.
Abdallah et al. introduced an Optimized Stimulation Control System (OSCS) for upper limb rehabilitation, incorporating a fuzzy logic-based control system [59]. The system works alongside a robotic exoskeleton to support patients with motor impairments.
At the core of the control algorithm is a fuzzy logic-based pain detection mechanism. It processes electromyography (EMG) signals to monitor muscle activity and pain levels during rehabilitation exercises. Fuzzy logic is chosen for its ability to handle imprecise inputs and make adaptive decisions, making it effective for real-time pain estimation and rehabilitation protocol adjustments. The system uses five membership functions for input parameters and three for muscle contractions, enabling accurate pain detection and appropriate modifications to the rehabilitation process.
The fuzzy logic controller is integrated with a functional electrical stimulation (FES) system. This integration allows precise muscle stimulation with adjustable parameters such as pulse amplitude, rate, and width. The robotic exoskeleton supports normal arm movements and is controlled through a LabVIEW interface. It enables precise actuation and real-time adjustments based on the fuzzy logic controller's outputs.
Clinical trials showed significant improvements in patients' range of motion, highlighting the system's effectiveness and potential for real-world applications.
The paper “Control of twin-double pendulum lower extremity exoskeleton system with fuzzy logic control method” presents a lower-limb exoskeleton (LLE) robot designed for gait rehabilitation and mobility assistance [60]. A twin-double pendulum system is used to model human leg movements. The study focuses on using a fuzzy logic controller (FLC) to manage joint movements and improve the exoskeleton's performance.
The FLC processes error and error derivation inputs through fuzzification, inference, and defuzzification to produce control signals for the robot's actuators. Simulations in the MATLAB/Simulink environment evaluate the system’s performance, showing low tracking errors and robustness under different load conditions and limb sizes. Tracking errors for the hip joint range from 1.73 to 3.21 degrees, while errors for the knee joint range from 1.86 to 3.47 degrees.
The exoskeleton's design emphasizes simplicity and cost-effectiveness. It uses only one encoder and one linear potentiometer per joint, yet achieves effective control. This minimal sensor setup highlights the efficiency of the proposed approach, making the exoskeleton suitable for widespread use in rehabilitation settings. The research demonstrates the potential of fuzzy logic control in improving the reliability and adaptability of LLEs. It maintains performance despite varying conditions, showcasing its effectiveness in supporting human movement.
The study contributes to the development of affordable and functional exoskeletons with accurate control and adaptability. The integration of fuzzy logic and adaptive control techniques plays a key role in enhancing the performance and reliability of robotic systems for rehabilitation and mobility assistance.
The article “Fuzzy radial-based impedance controller design for lower limb exoskeleton robot” discusses the development and testing of a fuzzy radial-based impedance (RBF-FVI) controller for a six-degree-of-freedom lower limb exoskeleton robot designed for rehabilitation [61]. This exoskeleton aims to assist patients with movement disorders in regaining mobility. A human-machine coupling model, based on a spring-damping system, enables coordinated interaction between the patient and the robot.
The RBF-FVI controller includes two modules: an inner-loop fuzzy position control and an outer-loop impedance control. The inner loop ensures precise trajectory tracking, while the outer loop adjusts the dynamic force-position relationship using impedance parameters. A radial basis function neural network (RBFNN) enhances outer-loop control by adapting impedance parameters in real-time, addressing system uncertainties and improving performance.
Simulations and hardware tests confirm the controller's effectiveness. The RBF-FVI controller achieves better trajectory tracking accuracy compared to conventional methods, with reduced joint angle errors. It provides minimal errors in both hip and knee joints, outperforming traditional feedback and standard impedance control strategies. The system supports stable and adaptive movement by converting interaction forces into real-time trajectory adjustments.
During experiments, the exoskeleton demonstrated safe support for human motion. Compliance control kept interaction forces at safe levels. However, sudden torque changes during gait phase transitions indicated the need for improvements in system response. The study concludes that the RBF-FVI controller significantly improves the exoskeleton’s ability to facilitate smooth and adaptive rehabilitation movements. Future research will focus on refining the control structure and conducting tests with stroke patients to further validate the system’s efficiency. The Table 5 summarizes the articles discussed in this section:
5.2. Linear Control
Using linear control systems on nonlinear systems is a common practice in control engineering, often motivated by the simplicity and well-established design methods of linear controllers. This approach typically involves linearizing the nonlinear system. Model based linearization techniques are commonly used to derive the linear model, enabling the application of traditional control strategies like PID, state feedback, or linear quadratic regulators (LQR). Using the Gravity and Coriolis and centrifugal model torque required to remove nonlinearities are calculated and supplied to the robot to remove nonlinearities. Figure 6 shows the example of model-based linearization and LQR based control scheme.
Linear control systems in exoskeleton robots provide a straightforward approach to managing movement and support functions, relying on linear relationships between inputs and outputs. In this setup, control responses are directly proportional to the input signals, which simplifies the control process and makes it easier to implement and tune. Linear control systems, like Proportional-Derivative (PD) and Proportional-Integral-Derivative (PID) control, are commonly used in exoskeleton applications where movements are relatively predictable and stable, such as assisting with walking or providing steady joint support. These controllers adjust force and position based on predefined proportional gains, allowing for smooth and steady movements.
One advantage of linear control in exoskeletons is its computational efficiency. Linear control algorithms are less complex than non-linear or adaptive controls, allowing them to run with minimal processing power, which is beneficial in real-time applications. However, linear control systems may struggle with more complex, non-linear dynamics often present in human-robot interactions. When dealing with irregular or unpredictable movements, linear control might not provide the required adaptability, potentially leading to reduced accuracy or stability. Linear control is often used in combination with more advanced control methods to enhance its performance in diverse and dynamic rehabilitation scenarios, providing a reliable foundation for basic, stable control. The following section will introduce readers to the recent advancements of the linear control schemes in controlling the rehabilitation exoskeleton robots.
5.2.1. Linear Quadratic Regulator
The Linear Quadratic Regulator (LQR) is a powerful optimal control strategy used to achieve precise and stable motion in robotic systems. It minimizes a cost function that balances system performance (e.g., trajectory tracking or posture stability) against control effort, ensuring efficient and effective operation. The cost function is typically quadratic in terms of the system state and control input, penalizing large deviations from desired states and excessive actuator usage. To calculate the LQR controller gains, the process begins by defining the system dynamics in state-space form, , where represents the state vector, the control input, and and the system matrices. The cost function of the form is specified, where is the state weighting matrix and the control effort weighting matrix. These matrices are chosen to reflect the desired trade-off between performance and effort. The LQR gains are then computed by solving the algebraic Riccati equation to find the optimal feedback matrix . The control law uses to regulate the robot's motion effectively. LQR is widely applied in robotics for tasks such as balancing, trajectory tracking, and stabilization of complex systems like manipulators or autonomous vehicles. Figure 6 shows the architecture of an LQR control system. The following section will explain the recent applications of the LQR controller in robotics.
The paper “Development of a novel autonomous lower extremity exoskeleton robot for walking assistance” introduces Auto-LEE, an autonomous lower limb exoskeleton designed to assist individuals with motor impairments [62]. Unlike traditional exoskeletons, Auto-LEE features ten independently actuated joints, enabling better balance and a natural gait without requiring support like crutches. Its modular structure and multi-modal human-robot interfaces, such as EEG and EMG controls, improve user interaction and broaden the applications of wearable walking aids in rehabilitation.
The exoskeleton’s control system incorporates sensors, including force sensors and IMUs, to monitor motion states and maintain stability during walking. A plantar pressure detection system measures the Zero Moment Point (ZMP) in real-time, which is crucial for balance. The study evaluates three algorithms for generating bipedal walking patterns: the three-dimensional inverted linear pendulum model (3D-ILPM), the cart-table model, and the ZMP preview control method. The ZMP preview control method is selected for its ability to generate continuous, real-time walking patterns and performs best in experiments.
The Auto-LEE virtual prototype, weighing 42 kg, successfully demonstrated self-balanced walking while carrying a 20 kg dummy. Future efforts will focus on improving stability on uneven terrain and enhancing safety in human-robot interaction. The study highlights the importance of joint motion in maintaining balance and emphasizes the exoskeleton’s adaptability to meet diverse user needs. This innovative design significantly enhances mobility and improves the quality of life for individuals with lower limb disabilities, marking a valuable advancement in rehabilitation robotics.
The paper “Lower Limb Exoskeleton with Compliant Actuators: Design, Modeling, and Human Torque Estimation” examines the design and control of a lower limb exoskeleton for rehabilitation therapy in individuals with mobility impairments [63]. The exoskeleton uses variable stiffness actuators (VSAs) in the hip and knee joints to provide compliant interaction, improving both safety and effectiveness. Designed to support patients with conditions like hemiplegia, the system features six degrees of freedom and weighs 14.4 kg. It also integrates with a wheeled walker for enhanced mobility.
Figure 6.
Architecture of a Linear Quadratic Regulator.
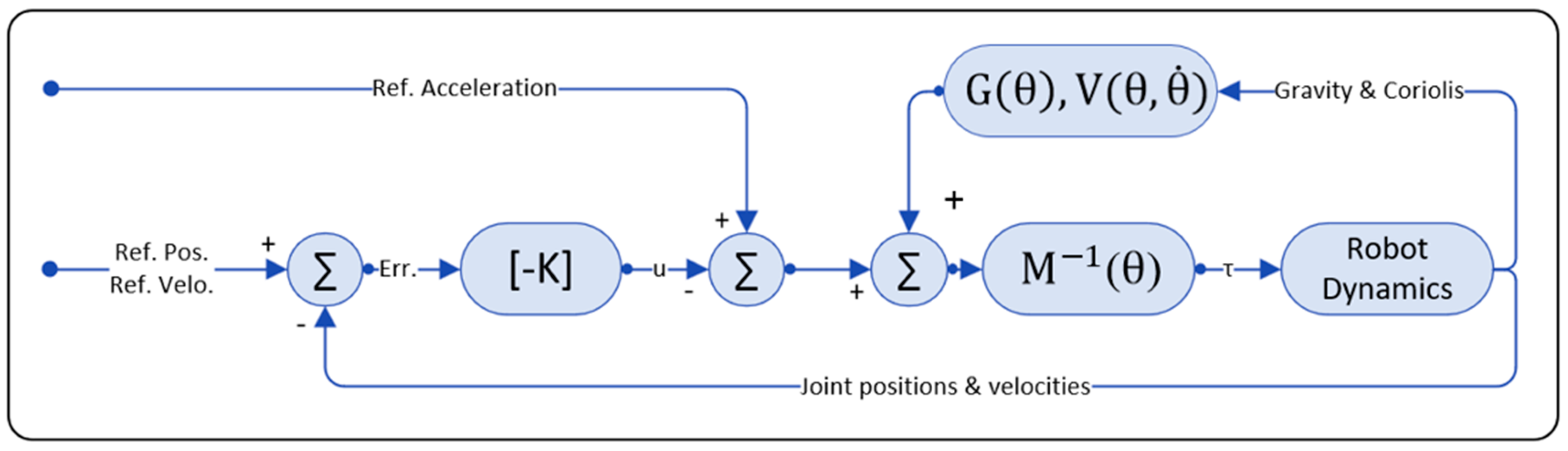
The control strategy employs a linear quadratic Gaussian regulator (LQG) and a Kalman filter to manage interaction torques and estimate internal states. Specifically, an Unscented Kalman Filter (UKF) estimates joint torques during the swing phase of walking. The UKF offers robust performance compared to traditional inverse dynamics methods, effectively handling fast dynamics and noise using empirical covariance matrices.
The exoskeleton and human leg are modeled as a double pendulum system, with dynamics described through Lagrange formalism. Interaction torque is measured using serial elasticity deflection, enabling real-time estimation of user motion intentions. Experimental results demonstrate the exoskeleton’s ability to assist with smooth gait patterns while maintaining low interaction torques.
The study emphasizes the importance of adaptability and responsiveness in rehabilitation exoskeletons. By focusing on safe human-machine interaction and accurate user intention estimation, it contributes to advancements in rehabilitation robotics. Future work will include online parameter estimation to further enhance system performance.
The article “Trajectory tracking using online learning LQR with adaptive learning control of a leg-exoskeleton for disorder gait rehabilitation” presents an advanced control framework for a leg exoskeleton designed to aid patients with gait disorders during rehabilitation [64]. The proposed system combines an online learning-based linear quadratic regulator (OILLQR) with adaptive iterative learning control (ILC) to address challenges like non-linear dynamics, uncertainties, and external disturbances. It focuses on optimizing learning rates and improving tracking accuracy.
The exoskeleton features two active joints per leg, allowing independent control of the hip and knee. It includes a weight support system to assist patients unable to bear their own weight, ensuring safe and effective rehabilitation. The dynamic model is developed using Euler-Lagrange equations, with the swing phase of motion as the primary focus.
The OILLQR framework integrates iterative learning with a linear quadratic regulator to dynamically adjust controller gains at every point in the gait trajectory. This helps mitigate disturbances and uncertainties during real-time operation. Adaptive ILC further enhances trajectory tracking by refining learning gains based on real-time data, reducing errors across successive cycles.
Simulation results show that OILLQR with adaptive ILC significantly outperforms traditional proportional-derivative (PD) controllers and standard LQR methods. It reduces tracking errors by 50% and accelerates the learning process, requiring fewer cycles to achieve stability. Experiments with a physical prototype validate these results, demonstrating improved tracking performance and faster adaptation to the desired gait pattern.
The study concludes that OILLQR with adaptive ILC provides precise and adaptive motion control, making it a valuable contribution to rehabilitation robotics. Future work will explore its application to other robotic systems with repetitive tasks and conduct further clinical validation to enhance its effectiveness in rehabilitation settings.
The article titled "Developing a Linear Quadratic Regulator for Human Lower Extremity Exoskeleton Robot" discusses the design of a Linear Quadratic Regulator (LQR) control system to enhance the functionality of rehabilitation exoskeleton robots [65]. The study focuses on improving trajectory tracking and minimizing energy consumption for exoskeletons assisting individuals with lower extremity impairments.
The researchers developed a 7-degree-of-freedom (DOF) dynamic model of the human lower extremity. This model incorporates realistic human biomechanics, including joint movements and friction dynamics. A LuGre friction model is used to simulate joint friction, capturing Coulomb friction, viscous effects, and the Stribeck phenomenon. The model provides a realistic basis for testing and validating the control system.
The LQR control strategy is designed to optimize the performance of the exoskeleton by minimizing cost function . This function accounts for tracking errors and control efforts, ensuring a balance between accuracy and energy efficiency. The study employs a feedback linearization approach to handle the nonlinear dynamics of the exoskeleton. By compensating for gravitational, Coriolis, and centrifugal forces, the system achieves linear behavior, enabling the LQR to work effectively.
Simulations conducted in MATLAB validate the controller's performance. Results show that the LQR achieves excellent trajectory tracking, with errors kept within one degree, even in the presence of joint friction. The controller also minimizes energy consumption, outperforming alternative control methods like PID, Computed Torque Control (CTC), and Sliding Mode Control (SMC). Comparisons highlight the LQR’s superior efficiency, with lower torque and power requirements for trajectory tracking tasks.
The study emphasizes the importance of stability analysis in control design. Using the Algebraic Riccati Equation, the researchers ensure that the LQR maintains stability under varying conditions. This robustness makes it suitable for diverse rehabilitation scenarios and user-specific variations, such as differences in patient weight and limb dynamics.
In conclusion, the research presents a significant advancement in rehabilitation robotics. The LQR-based control system offers a reliable, efficient, and precise solution for managing exoskeleton robots. Its ability to handle nonlinear dynamics, minimize energy use, and provide accurate trajectory tracking positions as a promising tool for enhancing mobility and recovery in patients with lower limb disabilities. Future work will focus on implementing the LQR in physical exoskeleton systems for clinical testing and further refinement. The Table 6 summarizes the articles discussed in this section:
The next section will discuss the application of Proportional-Derivative (PD) control methods in rehabilitation exoskeleton robots.
5.2.2. PD Control
Proportional-Derivative (PD) controllers are widely used in robotics applications due to their simplicity and effectiveness in achieving precise motion control and stability. The PD controller combines two components: the proportional term, which scales the control action based on the current error, and the derivative term, which predicts system behavior by considering the rate of change of the error. Together, these terms enable the robot to respond quickly to deviations from desired positions or trajectories while minimizing overshoot and oscillations. In robotics, PD controllers are commonly applied to tasks such as joint control in manipulators, balancing in bipedal robots, and trajectory tracking in mobile robots. Their computational efficiency makes them suitable for real-time control in systems with limited processing power. However, PD controllers may struggle with unmodeled dynamics, disturbances, or varying system parameters, which can limit their performance in complex or nonlinear robotic applications. To address these challenges, PD controllers are often augmented with adaptive or feedforward strategies to enhance robustness and adaptability. Figure 7 shows the simplified PD control architecture for robotics applications. Often a low pass filter is added after derivative gain to reduce the sensitivity. The following section will discuss some recent use of PD controllers for rehabilitation robotics applications.
The research paper “A Method for Obtaining the Parameters for Changing the Settings of the Control System of a Rehabilitation Device” presents a novel control system for lower limb exoskeletons designed to assist individuals with mobility impairments [66]. The goal is to develop a system that accurately replicates natural walking movements.
The study introduces a proportional-differential (PD) control system, which calculates the error between a desired setpoint and the actual position. Corrective actions are applied based on proportional and differential terms. The methodology includes data acquisition from walking trials, processing to determine average walking parameters, and approximating movement trajectories using polynomial functions. This approach ensures the exoskeleton mimics natural human movements with high precision.
The PD control system is integrated into the exoskeleton’s automatic control system, which includes angle sensors and DC motor drivers. This setup enables continuous adjustments in response to real-time data. The reported maximum trajectory deviation is less than 8.1%, with a mean error of 2.3%, well within the natural variation of human gait.
Orekhov et al. developed regression-based open-loop motor controllers for cable-driven exoskeletons and compares their performance with traditional closed-loop torque control system [67]. The goal is to improve control responsiveness and efficiency of the wearable exoskeletons for rehabilitation and mobility assistance applications. Open-loop controllers eliminate torque sensors, reducing cost and complexity.
The researchers developed two open-loop models, one using torque and velocity inputs (complex model) and the other using only torque inputs (simple model). These models predict motor current during walking and adjust assistance accordingly. Testing involved treadmill and over-ground walking with able-bodied participants, comparing the two open-loop controllers to closed-loop control in terms of torque tracking, power consumption, and noise.
Both open-loop controllers achieved similar torque tracking performance to closed-loop control while significantly reducing power consumption and noise. The simple open-loop controller performed better in some metrics, suggesting potential advantages in simpler designs. Participants perceived open-loop controllers as more consistent and assistive, highlighting their practicality for real-world use. However, they noted a stiffness that could be refined in future designs.
The study shows that open-loop controllers can match or exceed closed-loop performance in controlled settings. The reduced complexity and noise make them attractive for commercialization and long-term studies. The findings support further exploration of open-loop control methods for enhancing user comfort and adaptability in exoskeletons. Future work should address limitations in velocity estimation and evaluate the impact on users with mobility impairments over extended periods.
The paper titled “Modelling and Analysis of Coupling Dynamics of Swinging a Lower Limb Exoskeleton” examines the dynamics and control of lower limb exoskeletons, with a focus on improving mobility for elderly and disabled individuals [68]. It presents a novel model that analyzes human-exoskeleton coupling dynamics during swing motions. The model incorporates damped springs to represent the elastic and viscous properties of human tissue, addressing limitations in earlier methods that inaccurately predicted interactive forces due to unrealistic contact formulations.
A proportional-derivative (PD) feedback control mechanism with gravity compensation is employed to help users track desired trajectories with minimal errors. Joint torques and interactive forces are derived using Euler-Lagrange equations and validated through experiments. The study identifies several factors that significantly influence interaction dynamics, including desired trajectory, mass ratio, misalignment, coupling points, health condition, and band tightness.
Key findings suggest that tight coupling at the thigh reduces tracking errors for individuals with lower health conditions, while lightweight exoskeleton designs decrease forces and power requirements. Gravity compensation enhances tracking accuracy but has little impact on coupling forces. Misalignment increases tracking errors and forces, but adjustments to coupling points can mitigate these issues. The research highlights the importance of proper alignment and lightweight designs to optimize performance and user comfort.
Figure 7.
Simplified control architecture of a PD controller.
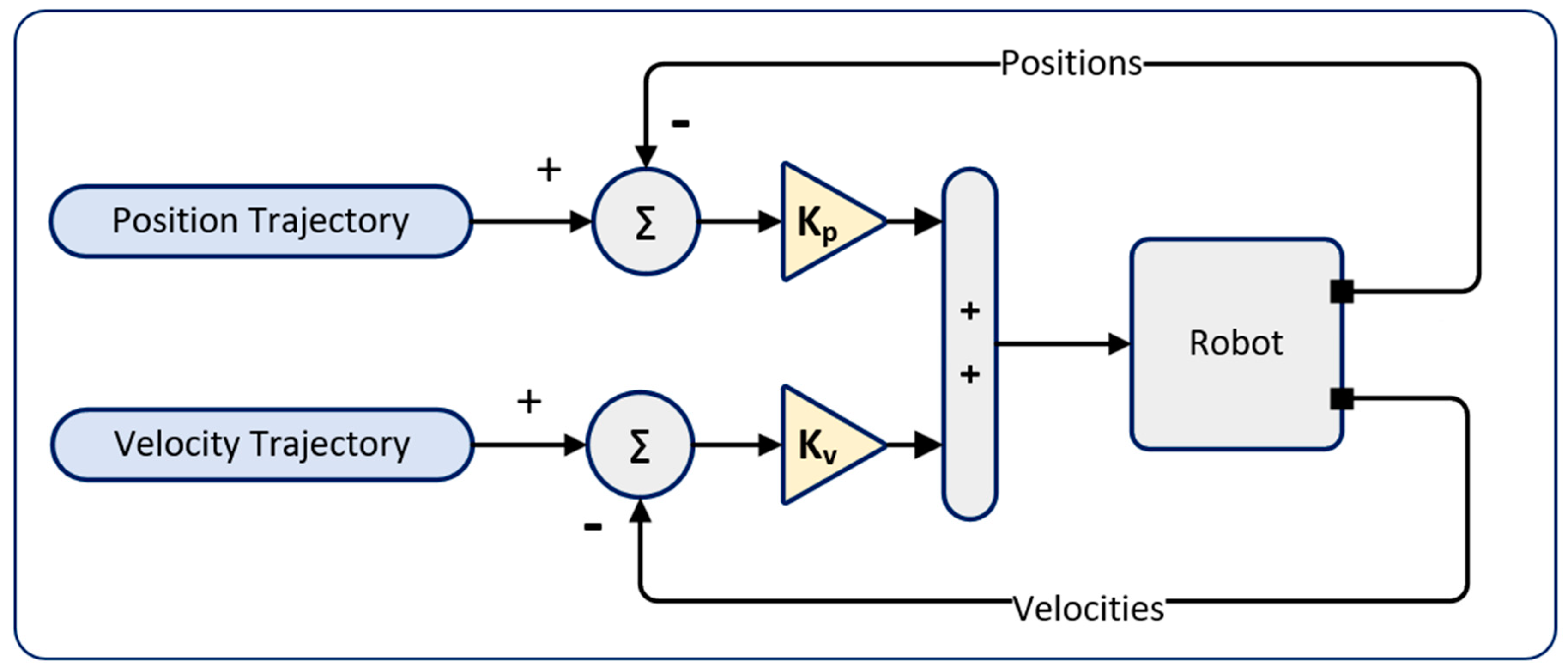
Although the study is limited to swing motions, future work will extend the analysis to more complex movements. The findings underscore the need for accurate modeling and human-centered design in developing effective rehabilitation technologies. This research is supported by grants and contributions from participants involved in data collection. The Table 7 summarizes the articles discussed in this section:
The next section will discuss the application of Proportional-Integral-Derivative (PID) control methods in rehabilitation exoskeleton robots.
5.2.3. PID Control
The Proportional-Integral-Derivative (PID) controller is widely used in robotics due to its simplicity, effectiveness, and ease of implementation. It offers a robust solution for managing robotic system dynamics, ensuring accurate and stable control. PID controllers are commonly employed for tasks such as trajectory tracking, speed regulation, and balance maintenance.
The proportional term addresses the current error by generating a control effort proportional to the difference between the desired and actual states. The integral term eliminates steady-state errors by summing past errors, while the derivative term predicts future errors by considering the error's rate of change. These three components work together to handle a variety of dynamic behaviors in robots.
Tuning the PID parameters-proportional, integral, and derivative gains is critical for achieving optimal performance. This process can be challenging in systems with high nonlinearity or significant external disturbances. An accurate dynamic model is essential for setting these gains to ensure stability and desired performance.
Despite its limitations, the PID controller remains a foundational element in robotic control systems. It is often combined with advanced strategies to enhance performance. Figure 8 illustrates the architecture of a PID controller for robotics applications. The next section will explore recent applications of PID controllers in rehabilitation robotics.
Yu et al. introduce an omnidirectional mobile exoskeleton robot for lower limb rehabilitation [69]. The system combines an omnidirectional mobile platform, a lower limb exoskeleton, and a support module, allowing versatile movement and effective rehabilitation training. The robot supports both passive and active training modes, adjusting its response based on contact forces detected by a tension sensor. This control approach simulates a mass-spring-damping system, emphasizing interaction between the robot and the user, differing from traditional methods.
The control system employs a PID (Proportional-Integral-Derivative) controller for position control. The robot’s dynamics are modeled using Lagrangian mechanics, with simulations examining the effects of varying damping and stiffness on system response. Experiments involved a healthy subject walking with the exoskeleton at an initial speed of 0.21 m/s. Different damping behaviors—overdamping, critical damping, and underdamping—were analyzed. Results showed that lower damping produced faster responses but larger overshoots, while higher damping reduced overshoots but increased steady-state errors.
The robot's performance was further tested by measuring contact forces and tracking hip and knee trajectories. In passive mode, the robot effectively assisted leg movement, maintaining stable contact forces and accurate trajectory tracking with minimal errors. In active mode, tracking errors and response lag slightly increased, but the robot still followed human movements effectively. These findings highlight the robot's potential for adaptive and interactive lower limb rehabilitation.
These results indicate that robots can aid rehabilitation, although improvements in hardware and control response are needed for better performance.
The paper titled “Differential Inverse Kinematics of a Redundant 4R Exoskeleton Shoulder Joint” introduces a 4R exoskeleton shoulder joint designed for upper extremity rehabilitation [70]. The joint features non-orthogonal axes, which enhance the range of motion and reduce the risk of collisions with the human body. A key component of the system is a differential inverse kinematics (IK) algorithm that manages joint redundancy.
Figure 8.
Robot Control architecture of a PID Controller.
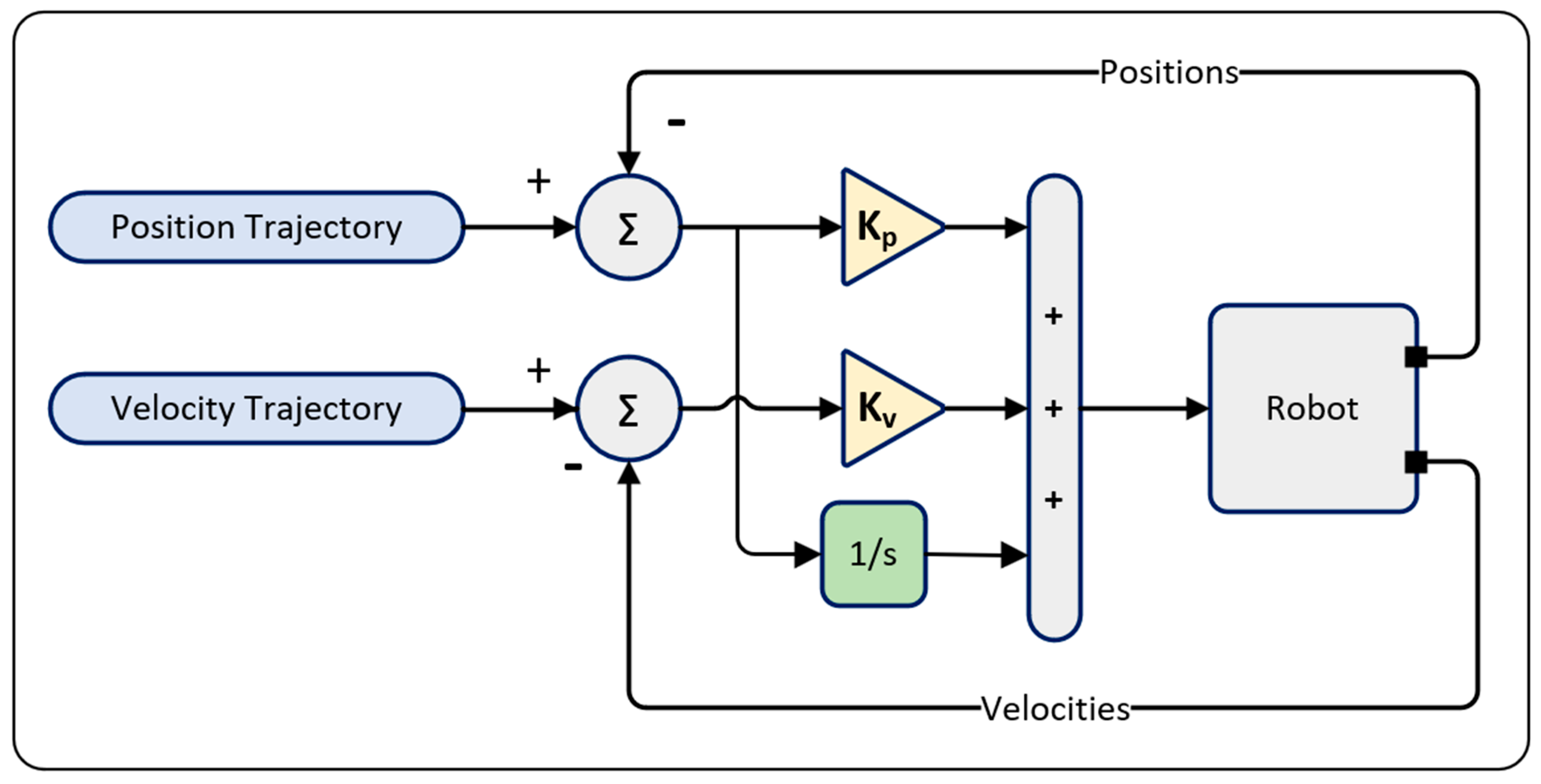
This algorithm improves joint conditioning and prevents collisions during movement without requiring precomputed trajectories.
The control system employs PID (Proportional-Integral-Derivative) control to regulate joint angles and velocities at a low level. The kinematic framework combines forward and inverse kinematics. Forward kinematics utilizes rotation matrices, while inverse kinematics calculates joint velocities based on known parameters. The Jacobian matrix, which links joint velocities to end-effector velocities, is computed using a pseudo-inverse. Joint-space constraints are implemented to avoid collisions with the human body. Additionally, null-space motions utilize redundancy for internal joint adjustments that do not alter the overall arm position. The system is designed to avoid singularities, where the Jacobian loses rank and limits movement options.
Real-time testing demonstrated the system’s ability to manage joint angles and velocities effectively. Analytical benchmarks validated the approach, showing improved joint conditioning and velocity management compared to traditional 3R architecture. The research highlights the potential of the 4R exoskeleton shoulder joint to provide advanced, collision-free movement for upper extremity applications.
The article “NESM-γ: An Upper-Limb Exoskeleton with Compliant Actuators for Clinical Deployment” presents an upper-limb exoskeleton designed for post-stroke rehabilitation [71]. The control system features a hierarchical structure with a high-level control layer (HLCL) and a low-level control layer (LLCL). The HLCL processes user commands and determines the desired interaction torques, while the LLCL executes motor commands to track these reference torques.
A notable feature of the system is the model-based low-level torque controller, enhanced with feed-forward gravity compensation. The exoskeleton utilizes a 2-pole-2-zero (2p2z) controller, enabling it to support users without restricting natural movements. The hardware control unit includes a real-time controller and FPGA, ensuring efficient operation. The HLCL operates at 100 Hz, and the LLCL runs at 1 kHz, allowing for timely feedback and responsiveness during rehabilitation tasks. This demonstrates the system's ability to manage dynamic movements effectively. The study highlights the potential of the NESM-γ exoskeleton to enhance post-stroke rehabilitation through its advanced control system and responsive design.
Tanyıldızı et al. examine the design, modeling, and control of a three-degree-of-freedom (DoF) upper limb exoskeleton robot [72]. The exoskeleton includes a fixed hand-holding mechanism, a shoulder joint with two DoFs, and an elbow joint with one DoF. Its rotational axes are aligned with human anatomy to ensure ergonomic integration and user comfort. The system is powered by three motors that control shoulder and elbow movements, prioritizing load-carrying capacity and effective user interaction.
The control system uses a fractional Proportional Integral Derivative (PID) controller integrated with inertial measurement units (IMUs). The IMUs estimate joint angles by combining data from gyroscopes, accelerometers, and magnetometers. The fractional PID controller is selected for its superior flexibility and performance compared to traditional PID controllers. Performance tests conducted under varying loads revealed that, although tracking errors increased with higher loads, the fractional PID controller maintained lower errors than reported in existing studies.
The exoskeleton’s kinematic and dynamic behavior is modeled using Denavit-Hartenberg (D-H) parameters. A multibody system model was also developed in Matlab Simscape to analyze its performance. The study highlights the effectiveness of the fractional PID controller in maintaining precise motion control and demonstrates the potential of the exoskeleton for upper limb rehabilitation.
The paper titled “Design and Preliminary Validation of a Lower Limb Exoskeleton with Compact and Modular Actuation” describes the design and initial testing of a lower limb exoskeleton (LLE) for paraplegic patients with spinal cord injuries, aiming to aid in regaining locomotion [73]. The exoskeleton incorporates geared motor-driven actuators for the hip and knee joints, using a synchronous and gear drive system to ensure compactness and effective torque distribution. Its modular design enables ergonomic frame customization, improving user comfort and integration.
The control system is structured into high-level gait control, which interprets user motion intentions, and low-level motor control, which operates the motors based on these inputs. Compact motor controllers (EPOS4 50/8 CAN) are used for precise motor control, with integrated sensors providing position feedback. Preliminary validation involved benchtop tests and human subject trials. These tests showed good tracking precision, repeatability, and torque capacity, along with smooth and symmetrical joint trajectories during walking.
The design emphasizes modularity, compactness, and ergonomics, with torque-dense motors and efficient transmission ratios in the hip and knee modules. The exoskeleton weighs approximately 12.8 kg, with joint actuators accounting for 60% of the total mass. The results indicate that the LLE reduces user effort and produces smooth gait cycles, making it a promising solution for individuals with mobility impairments. Future work involves optimizing the mechanical design, improving the electrical and control systems, and conducting additional experimental validations with a larger subject pool. The paper contributes to the field of rehabilitation robotics, offering a potential solution for enhancing mobility in individuals with impairments.
The paper titled “Optimized Proportional-Integral-Derivative Controller for Upper Limb Rehabilitation Robot” focuses on optimizing PID controller parameters for a two-degrees-of-freedom (2-DOF) upper limb rehabilitation exoskeleton, RAX-1, using nature-inspired algorithms [74]. Traditional PID tuning methods, such as Ziegler-Nichols (ZN), often result in large overshoots, which are unsuitable for rehabilitation applications. To overcome this limitation, the study utilizes Particle Swarm Optimization (PSO) and Artificial Bee Colony (ABC) algorithms to improve PID controller performance.
The research includes a comprehensive analysis of the robotic arm's kinematics and dynamics, employing the Denavit-Hartenberg convention and Euler-Lagrangian approach to derive motion equations. The exoskeleton features DC motors with harmonic gears, integrated sensors, and a graphical user interface for control. The study evaluates the performance of ABC-PID, PSO-PID, and ZN-PID controllers, focusing on metrics such as overshoot, rise time, and settling time. Among these, the ABC-PID controller achieves the best results, offering minimal overshoot and robust stability, as confirmed by Nyquist plots.
Experiments involving three healthy male subjects performing shoulder exercises demonstrate that the ABC-optimized PID controller provides smoother responses and eliminates steady-state errors, making it highly suitable for rehabilitation purposes. The paper emphasizes the importance of optimizing PID parameters to ensure effective and safe rehabilitation, particularly for stroke patients. It also outlines plans to extend the exoskeleton's functionality to include elbow and wrist rehabilitation in future work. Overall, the study highlights the effectiveness of using PSO and ABC algorithms to optimize PID controllers in robotic rehabilitation systems.
The paper titled “Lower Limb Exoskeleton with Energy-Storing Mechanism for Spinal Cord Injury Rehabilitation” presents a lower-limb exoskeleton designed for spinal cord injury (SCI) rehabilitation [75]. It introduces an innovative energy-storage mechanism that uses springs and camshafts. This mechanism reduces motor load and enhances torque compensation by converting body weight into potential energy.
The system significantly lowers energy requirements, allowing for improved mobility. It achieves a maximum walking speed of 0.5 m/s and operates for two hours on full charge. The exoskeleton incorporates a control system that uses electroencephalography (EEG) and electrooculogram (EOG) signals to interpret user intentions. This enables seamless interaction and natural movement. A proportional-integral-derivative (PID) control algorithm ensures precise motor control, improving movement fluidity.
MATLAB simulations are used to estimate ground reaction forces and joint torques during sit-to-stand and stand-to-sit motions. These simulations guide the exoskeleton's design and optimization. The mechanical design, named BART LAB EXO-II, features 11 degrees of freedom with both passive and active joints to support natural movement patterns.
Comprehensive laboratory tests validate its effectiveness in enhancing mobility for SCI patients. Tests demonstrate a significant reduction in torque at the hip and knee joints during various movements. The findings highlight exoskeleton’s potential as a rehabilitation tool.
The paper emphasizes the exoskeleton's advanced control system and innovative design, which together improve functionality in rehabilitation. Future work will focus on customization and compatibility using machine learning, advancing exoskeleton technology for better outcomes in SCI mobility support.
Another study, titled “Generalized Control Framework for Exoskeleton Robots by Interaction Force Feedback Control,” introduces a new control framework for exoskeleton robots [76]. It focuses on interaction force feedback control to improve physical interaction between the exoskeleton and its wearer. The framework unifies various control methods under a standardized force feedback system, making it adaptable to a range of exoskeleton applications.
The control system is designed as a multi-SISO (Single Input, Single Output) structure with a diagonal controller matrix, employing PID (Proportional-Integral-Derivative) controllers. Stability is ensured using the Nyquist criterion. The framework includes two loops: one for controlling interaction forces and another for generating reference forces tailored to the user’s needs. This dual-loop design allows precise delivery of reference forces, ensuring a light operational feel and robustness against disturbances. The authors argue that this approach achieves robust control without disrupting the wearer’s natural movements.
Experimental validation involved four test scenarios using a 2-DOF lower-limb exoskeleton. These tests measured system loads without control, controlled zero interaction forces, tracked non-zero reference forces, and tested robustness against external disturbances. Results showed the effective delivery of desired reference forces, a light operational feel, and resilience to disturbances.
The authors suggest that future work will expand this framework to full-body exoskeletons. This study highlights the potential of the generalized control framework to standardize control methods for diverse applications, enhancing exoskeleton adaptability and functionality for rehabilitation and assistance.
Valdivia et al. discusses the development and evaluation of HipBot, a robotic device designed for hip rehabilitation therapy [77]. HipBot addresses the need for improved rehabilitation systems, especially for patients with mobility challenges due to conditions like stroke or surgery. The robot is designed to assist in movements critical for hip rehabilitation, including abduction/adduction and flexion/extension, combining these actions to replicate therapeutic exercises.
HipBot features a mechatronic design with five degrees of freedom (DOF), providing stability, safety, and adaptability for patients of varying sizes. The system uses a robust mechanical structure with linear and rotary actuators to ensure precision and smooth operation. A graphical user interface (GUI) allows therapists to guide the robot through desired movements, which it then learns and replicates autonomously.
The control system incorporates a combination of PID and impedance controllers to manage force and position during exercises. This approach ensures accurate trajectory tracking while responding to external forces. Safety is prioritized through various hardware and software measures. These include emergency stops and continuous monitoring routines. Tests conducted with healthy volunteers demonstrated HipBot’s ability to accurately reproduce therapeutic movements taught by therapists.
The system was stable under varying weights and conditions, with minimal errors in motion. The robot effectively performed both individual and combined hip movements, proving its potential to improve physiotherapy outcomes. The study concludes that HipBot is a promising tool for hip rehabilitation, offering an efficient and safe alternative to traditional methods.
summarizes the articles discussed in this section:

Table 8.
Summaries of the articles which use PID Control method.
| Degrees of Freedom (DOF) | Control Technique | Reference |
| 4 | PID-controlled omnidirectional mobile exoskeleton for lower limb rehabilitation. | [69] |
| 4 | Differential inverse kinematics with PID control for redundant 4R exoskeleton shoulder joint. | [70] |
| 6 | Hierarchical control system with model-based low-level torque control for upper-limb exoskeletons. | [71] |
| 3 | Fractional PID control system with IMU-based joint angle estimation for 3-DOF upper limb exoskeleton. | [72] |
| Not Specified | High-level gait control with low-level motor control for modular lower limb exoskeleton. | [73] |
| 2 | Optimized PID control system for 2-DOF upper limb rehabilitation exoskeleton using PSO and ABC. | [74] |
| 5 | Energy-storing mechanism with PID control system for spinal cord injury rehabilitation exoskeleton. | [75] |
| 2 | Interaction force feedback control system with PID for multi-SISO exoskeleton robots. | [76] |
| 5 | PID and impedance control system for five-DOF robotic hip rehabilitation device. | [77] |
The next section will discuss the application of Admittance control methods in rehabilitation exoskeleton robots.
5.3. Admittance Control
Admittance control in exoskeleton robots enables intuitive and responsive interaction by managing the robot's response to external forces exerted by the user. Unlike traditional position-based systems, it adjusts movement based on sensed forces, making the exoskeleton feel like a natural extension of the body. This approach is especially useful in rehabilitation, where patients may apply varying forces due to fluctuations in strength, stability, or motor control. By regulating the force-motion relationship, admittance control allows the exoskeleton to respond dynamically, provide assistance tailored to the user's needs and intentions.
Admittance control works by continuously measuring the forces and torques applied by the user and adjusting the exoskeleton's response accordingly. For instance, gentle pushes from the user result in minimal assistance, while stronger forces prompt greater support. This adaptability creates more comfortable and cooperative interaction. It improves the user's sense of control and reduces the mental effort needed to operate the device. Although this approach relies on precise force sensors and high responsiveness, it offers a smoother and more personalized experience. This makes it particularly suited for rehabilitation, where user comfort and natural movement are crucial. The next section of the article highlights recent applications of admittance control in rehabilitation exoskeletons.
The paper “A Variable-Admittance Assist-As-Needed Controller for Upper-Limb Rehabilitation Exoskeletons” introduces a two-port variable admittance control approach tailored for upper-limb rehabilitation [78]. The system adapts to users based on their level of disability, allowing simultaneous regulation of hand position and arm posture. Its core feature is variable admittance control, an adaptive mechanism that dynamically adjusts parameters according to user performance and intention, unlike traditional fixed-model controllers.
The control system modulates damping and stiffness to deliver a personalized rehabilitation experience. A notable feature is its ability to regulate interaction forces at both the wrist and upper arm, enabling effective training for hand motion and arm posture. The two-port admittance controller enhances user engagement by responding to movements while preventing improper arm postures.
The architecture includes a low-level position control loop that manages the robot’s dynamics. This loop converts human arm trajectories into exoskeleton trajectories, ensuring alignment with user intentions. Experimental results from simulations and a pilot study with healthy participants confirm the system's feasibility and effectiveness.
The variable admittance controller demonstrates superior adaptability and user engagement compared to fixed-model controllers. The research validates its ability to emulate disabilities and provide appropriate assistance during rehabilitation tasks, highlighting its potential for advancing personalized rehabilitation technologies.
The research article titled “Adaptive Gait Training of a Lower Limb Rehabilitation Robot Based on Human-Robot Interaction Force Measurement” presents an innovative lower-limb rehabilitation robot [79]. This robot is designed to enhance adaptive gait training using precise human-robot interaction force measurements. Traditional rehabilitation robots often rely on fixed walking trajectories, overlooking patients' residual muscle strength and individual movement patterns.
To address these limitations, the robot combines active and passive joint movements. It uses cantilever beam force sensors to measure interaction forces between the robot and the patient. These measurements enable a dynamic model that estimates the forces exerted by the human leg. The robot's functionality is based on the admittance control method, which allows it to adapt its gait in response to the patient's movements.
Key parameters of the admittance control system include stiffness , damping , and inertia . These parameters ensure the robot responds appropriately to patient-exerted forces. The dynamics of the robot are modeled using Lagrange equations, calculates the interaction torque from the human leg as a passive force. A fixed stiffness connection is assumed between the human leg and the robot.
The process involves collecting gait data, stabilizing it through filtering, and generating smooth gait curves using cubic spline interpolation. Experimental trials demonstrate the robot’s ability to measure and respond to interaction forces effectively. The findings suggest that the robot significantly enhances rehabilitation training by providing personalized support tailored to the patient's needs.
The paper, "Physical Human-Robot Interaction of a Robotic Exoskeleton by Admittance Control," explores an innovative framework for human-robot interaction (pHRI) using a robotic exoskeleton [80]. The study focuses on implementing admittance control to accommodate human intention while addressing challenges like unknown dynamics and variable stiffness in the system.
Admittance control is optimized in this work through adaptive mechanisms. This includes reshaping reference trajectories based on interaction forces and dynamically adjusting stiffness parameters to improve compliance and minimize errors in task execution. The approach integrates inner and outer control loops: the inner loop manages unknown robotic dynamics, while the outer loop aligns interaction models with human intentions. The adaptive control method ensures robust performance without requiring extensive offline model tuning.
The study applies this framework to various pHRI tasks, demonstrating the system’s ability to adapt to diverse human force levels and motion intentions. Experimental results show significant improvements in trajectory tracking, force minimization, and task execution efficiency. Key innovations include adaptive stiffness estimation, trajectory reshaping, and a robust control design capable of addressing uncertainties in the robot's physical and dynamic parameters.
In comparison to traditional methods with static impedance parameters, the proposed control technique achieves better compliance and reduced human effort during interaction. Experimental validations highlight the efficacy of this system in scenarios involving dynamic interactions between humans and robotic systems.
The paper's contributions are pivotal for advancing robotic exoskeletons in applications like rehabilitation and cooperative manipulation. It emphasizes user-centric control designs that seamlessly integrate human and robotic capabilities for effective physical collaboration.
The paper, "Adaptive Admittance Control for Human-Robot Interaction Using Model Reference Design and Adaptive Inverse Filtering" introduces a two-loop control architecture aimed at improving the adaptability and robustness of physical human-robot interaction (pHRI) [81]. This approach separates the robot's control requirements from task-specific performance objectives, making the system more intuitive for human operators.
The inner loop of the proposed system focuses on robot-specific control. It employs a neuroadaptive controller that ensures the robot behaves according to a predefined admittance model, independent of task dynamics. This design allows the robot to compensate for nonlinearities and disturbances without needing detailed task information, simplifying the interaction for the human user.
The outer loop is dedicated to task-specific adaptations. Using adaptive inverse filtering techniques, it adjusts the parameters of the prescribed admittance model to align the robot's behavior with the ideal task requirements and human operator dynamics. This loop enables the robot to adapt to different users and varying levels of human skill.
The system was tested in experiments involving a PR2 robot performing point-to-point motion tasks under human guidance. Results showed that the adaptive control architecture significantly reduced human effort and improved task performance compared to standard admittance control methods. The stability of the combined system was analyzed and confirmed through theoretical proofs. It demonstrates that the two-loop structure provides robust and stable interaction.
This study highlights the potential of adaptive admittance control to improve pHRI in applications like rehabilitation and cooperative tasks. By combining task-specific learning with robust robot control, the system effectively integrates human dynamics into robotic behavior. Future research will explore broader human models and advanced techniques such as reinforcement learning to further improve adaptability and usability.
The Table 9 summarizes the articles discussed in this section:
The next section will discuss the application of Proportional-Integral-Derivative (PID) control methods in rehabilitation exoskeleton robots.
5.4. Model Predictive Control
Model Predictive Control (MPC) is an advanced control technique used in exoskeleton robots to achieve optimal movement by predicting and adjusting the robot’s actions based on a model of dynamics. MPC works by predicting future states of the exoskeleton over a set time horizon and determining the control actions needed to meet a specific objective, such as maintaining stability or following a desired path. MPC optimizes each step, enabling the exoskeleton to respond proactively to anticipated changes. This makes it highly effective in scenarios that require precise and adaptable assistance, such as rehabilitation exercises.
A key benefit of Model Predictive Control (MPC) is its ability to manage constraints, such as joint limits and force thresholds. This ensures the exoskeleton operates safely while maintaining performance. MPC is particularly useful for complex rehabilitation tasks where safety and comfort are essential.
The iterative optimization process of MPC is computationally demanding. However, advancements in processing power and algorithm efficiency now make real-time applications feasible. By continuously optimizing future movements, MPC adds a predictive and adaptive layer of control. This improves the smoothness and responsiveness of exoskeleton-assisted rehabilitation.
Yan et al. introduced Laguerre Function-based Model Predictive Control (LF-MPC) for trajectory tracking in wearable upper limb rehabilitation robots [82]. This control method focuses on optimizing performance while minimizing computational load. The study models the rehabilitation robot dynamically, incorporating joint position, velocity, torque, mass inertia, centripetal, Coriolis, and gravitational forces.
The trajectory tracking problem is formulated as minimizing the tracking errors. An extended state-space model with pseudo-linearization enhances control accuracy and stability. Laguerre functions are used to approximate the system's pulse response, simplifying the control problem into solving a parameter vector. This reduces optimization parameters, balancing performance and computational efficiency.
A performance index, including system states and control inputs, refines the control system. Minimizing this index determines the optimal control input while respecting input and state constraints. Asymptotic stability is ensured using a Lyapunov-based analysis. A disturbance observer further boosts system performance.
Simulations highlight the method's superiority over traditional approaches like Generalized Predictive Control (GPC) and PID-Computed Torque Control (PID-CTC), showing better accuracy and stability.
Bao et al. developed a tube-based nonlinear model predictive control (NMPC) method for regulating knee joint angles in hybrid neuro-prosthesis system [83]. This system integrates functional electrical stimulation (FES) to activate paralyzed muscles and powered exoskeletons for reliable torque assistance. The method addresses challenges related to modeling uncertainties and disturbances.
The control strategy minimizes the error between actual and nominal knee angles. It combines feedback control with NMPC to enhance performance. A key feature is the terminal cost approach, which reduces computational demands while maintaining similar performance to terminal constraint methods. This makes the method suitable for real-time rehabilitation therapies.
The study models the system in state-space form, including muscle activation, fatigue dynamics, and disturbances. It assumes bounded disturbances and controllability of the linearized model. The tube-based NMPC ensures recursive feasibility and stability while respecting input constraints. It also maintains desired state trajectories and specifies conditions for MPC algorithm feasibility and stability.
Tests were conducted to estimate parameters for knee joint movement and muscle fatigue dynamics. The results confirmed the system's effectiveness in maintaining knee angle regulation.
The paper titled “ANFIS and MPC controllers for a reconfigurable lower limb exoskeleton” explores advanced control algorithms for improving gait stability and user comfort in reconfigurable lower limb exoskeletons (LLEs) [84]. It focuses on Adaptive Neuro-Fuzzy Inference System (ANFIS) and Model Predictive Control (MPC) as alternatives to traditional Proportional-Derivative (PD) controllers, which struggle with the nonlinear dynamics of human limb movements.
ANFIS combines neural networks and fuzzy logic, using triangular membership functions and a Sugeno-type rule set to adapt to varying conditions. MPC, known for handling multivariable systems and constraints, optimizes control actions for the complex dynamics of LLEs. The exoskeleton is modeled as a two-link planar rotational robot manipulator. Performance is evaluated using various error indices.
Simulation results show that MPC provides the best tracking performance, followed by ANFIS, while PD controllers lag in adaptability and precision. These findings suggest that ANFIS and MPC can improve torque and traction control. It improves the responsiveness and comfort of LLE systems. The study is based on simulations, and it highlights the transformative potential of advanced controllers for rehabilitation and assistive technologies. The Table 10 summarizes the articles discussed in this section:
The next section will discuss the application of Proportional-Integral-Derivative (PID) control methods in rehabilitation exoskeleton robots.
5.5. Intelligent Control System
Intelligent control systems in exoskeleton robots enhance rehabilitation by using AI techniques including different forms of neural networks and fuzzy logic. These systems learn from user data, allowing exoskeleton to adapt to each individual's movement patterns, needs, and progress. For example, a neural network-based controller can analyze past interactions, identify movement patterns or preferences, and adjust the exoskeleton's responses to offer tailored assistance.
This learning process makes these systems highly adaptable, refining their actions through continuous feedback for smoother and more effective rehabilitation sessions. They effectively address the non-linear and unpredictable aspects of human movement, which are often challenging for traditional methods to manage. Using AI, these systems make real-time decisions based on sensor data, adjusting to changes in a user's physical condition, strength, or motor control abilities.
This adaptability is essential for rehabilitation, where progress varies between patients. While intelligent control systems can be computationally demanding, improvements in processing power are making them more practical. They promise a more intuitive, responsive, and user-focused rehabilitation experience, contributing to better recovery outcomes.
Intelligent systems are often used to interpret physiological signals and utilize them for control purposes. These systems can also predict joint torque requirements for tracking specific trajectories. In most cases, a PD controller is placed alongside the AI-based prediction system. This setup helps reduce prediction errors and improves trajectory tracking performance. Figure 9 shows the generalized control architecture using artificial intelligence for trajectory tracking. From the figure we can see that joint torque predictors predict the required torque based on the trajectory. Whereas the PD controller placed in parallel with the joint torque predictor for correcting the prediction error and combinedly it runs the robot [85,86]. The following section will introduce readers with some recent uses of Intelligent control system for rehabilitation robotics applications.
Huang et al. propose a neural network-based sliding mode control (NNPSMC) system for a robotic orthosis powered by Pneumatic Artificial Muscles (PAMs) [87]. This control approach aims to improve joint angle position control, especially for gait training in rehabilitation. PAMs are noted for their compliance and safety. These features make them suitable for assisting patients with neurological impairments.
The system uses a back-propagation neural network to enable real-time tuning of PID gains. This adaptive tuning optimizes control parameters based on the system's operational conditions. As a result, the control system manages varying loads and individual differences in human subjects more effectively than traditional methods.
The study compares NNPSMC to proxy-based sliding mode control, which combines a virtual proxy with PID and sliding mode control laws to manage positional errors. Experimental results show that NNPSMC outperforms proxy-based methods. It reduces tracking errors and oscillations, particularly under dynamic conditions. The system adapts better to load changes and individual gait patterns, maintaining accurate trajectory tracking with minimal errors across subjects.
This adaptability offers a clear advantage over fixed PID gains used in PSMC. It also addresses challenges such as disturbances from friction and the need for users to adjust to the robotic system.
The paper titled “Human-Gait-Based Tracking Control for Lower Limb Exoskeleton Robot” presents a new control scheme for lower-limb exoskeleton robots (LLER) designed to assist stroke patients in rehabilitation by replicating human gait patterns [88]. The system uses an adaptive radial basis function network (ARBFN) controller and a feed-forward controller to improve trajectory tracking and performance.
The ARBFN controller handles uncertain model parameters by predicting and adapting to them, ensuring precise movement replication for effective therapy. The feed-forward controller enhances response speed and compensates for input torque based on tracking errors, boosting stability and performance.
The study collected human gait data from three healthy subjects using a 3D motion capture platform. Simulations showed the system’s effectiveness, with significant improvements in trajectory tracking accuracy and overall performance.
The study combines neural network-based adaptive control with feed-forward compensation to address uncertain parameters and improve system responsiveness. Future research may integrate electroencephalogram (EEG) data to capture movement intentions, further enhancing adaptability to individual users.
The article titled “Radial Basis Function-Based Exoskeleton Robot Controller Development” discusses the creation of a novel control system for a human lower extremity exoskeleton robot [89]. The focus is on a radial basis function (RBF) neural network designed to address the challenges of controlling robots with nonlinear dynamics and high degrees of freedom. This approach seeks to enhance trajectory tracking precision and computational efficiency while maintaining system stability.
The exoskeleton is modeled with seven degrees of freedom, capturing the complexities of human lower limb motion. A realistic friction model is integrated, accounting for Coulomb friction, viscous effects, and the Stribeck phenomenon. These elements ensure the control system can adapt to the nonlinear behaviors inherent in robotic and human interactions. Dynamic modeling is performed using both the Newton-Euler and Lagrange methods to accurately capture mass, gravity, Coriolis, and centrifugal effects.
The study introduces a radial basis function neural network as the core of the control system. Unlike traditional computed torque controllers (CTC), which rely heavily on exact dynamic models and demand high computational power, the RBF neural network leverages parallel processing capabilities. The neural network predicts joint torques required for trajectory tracking and compensates for nonlinearities in real time. This predictive mechanism reduces the computational burden associated with calculating dynamic matrices in traditional approaches, making it ideal for high-speed applications.
A Proportional-Derivative (PD) controller is integrated into the feedback loop to manage prediction errors from the RBF network. The hybrid approach combines the feedforward capabilities of the RBF network with the error-correcting properties of the PD controller. This structure ensures stability and precise trajectory tracking, even under varying operating conditions.
Figure 9.
Generalized Control Architecture of an AI based controller.
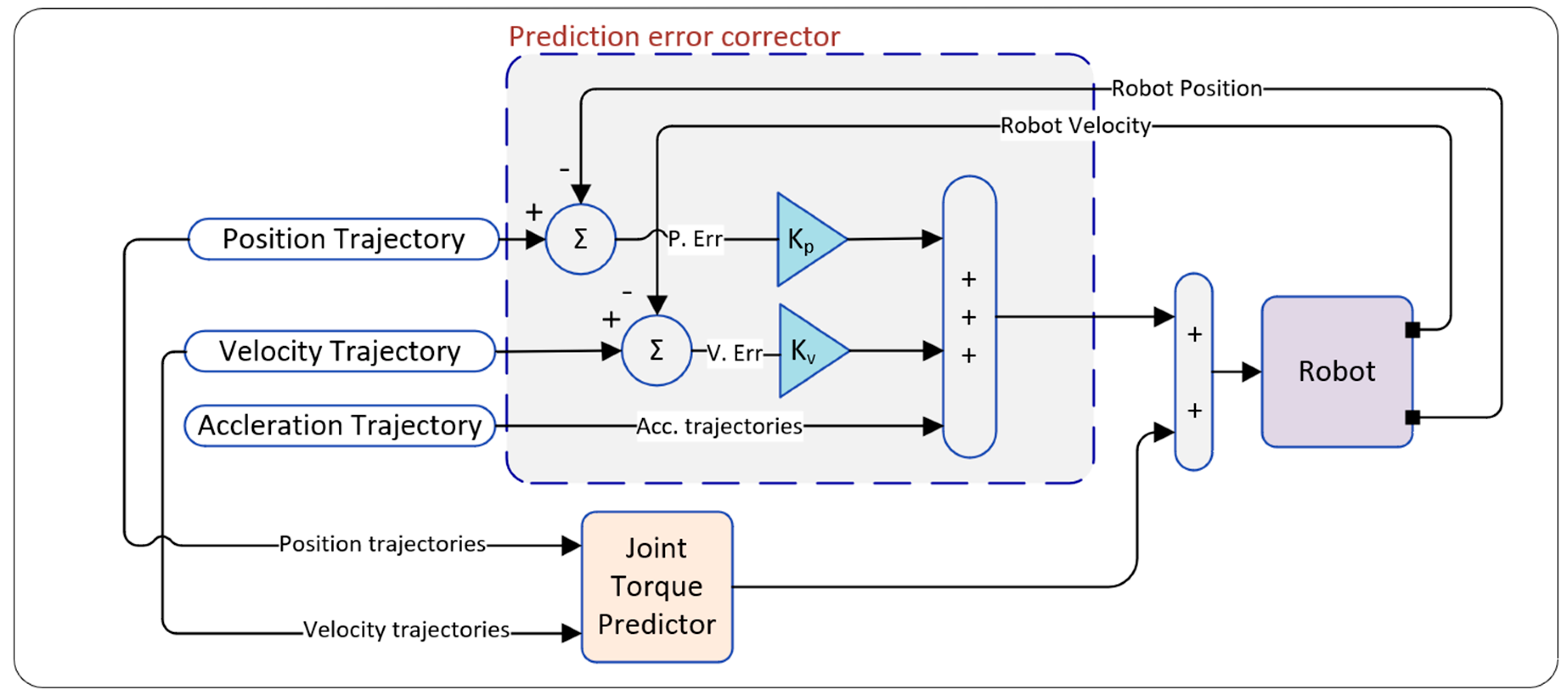
Simulation results demonstrate the effectiveness of the RBF-based controller in achieving accurate trajectory tracking for both sequential and simultaneous joint movements. Comparisons with traditional controllers, such as sliding mode controllers and adaptive controllers, highlight the superior computational efficiency and robustness of the RBF-based approach. The controller consistently maintained high performance with minimal trajectory tracking errors, even when subjected to parameter variations like user weight and height.
The study concludes that the RBF-based control system offers significant advantages in terms of robustness, energy efficiency, and computational speed. Its ability to handle nonlinearities and adapt to dynamic changes makes it a promising solution for rehabilitation.
The article titled "Deep Learning Technology-Based Exoskeleton Robot Controller Development" discusses the creation of a novel control system for a lower extremity exoskeleton robot [90]. The work focuses on developing a hybrid control mechanism integrating deep learning with traditional proportional-derivative (PD) control. The goal is to enhance trajectory tracking, efficiency, and adaptability for robots designed to assist in rehabilitation and mobility.
The study highlights the challenges associated with conventional model-based controllers, which rely on precise dynamic models of robots. Such models often struggle with nonlinear dynamics and computational delays, especially for robots with high degrees of freedom. To address these challenges, the authors propose a deep neural network (DNN)-based approach. DNN serves as a feed-forward control mechanism, estimating the joint torques needed for accurate trajectory tracking in real time.
The developed system is built on a 7-degree-of-freedom exoskeleton robot model that incorporates realistic human dynamics, including anthropometric data, joint friction, and the effects of gravity, Coriolis, and centrifugal forces. This comprehensive modeling ensures accurate simulation and control of the robot’s behavior under real-world conditions.
The neural network used in this system features a parallel structure with multiple hidden layers. It predicts joint torques based on input data, including desired joint trajectories and user-specific parameters like weight and height. The authors trained the network using large datasets generated through dynamic simulations of sequential and simultaneous joint movements. This training process ensures that the network can generalize well across various operating conditions.
To mitigate the prediction errors of the DNN, a PD controller is added in a feedback loop. This hybrid design leverages the neural network's computational efficiency for feed-forward control while relying on the PD controller for stability and error correction. Stability analysis of the system confirms that the hybrid controller is robust and maintains performance across variations in user parameters and environmental disturbances.
Simulation results demonstrate that the developed controller achieves excellent trajectory tracking with minimal error. It outperforms traditional controllers like sliding mode control, computed torque control, and linear quadratic regulators in terms of accuracy and computational efficiency. Additionally, the controller is shown to be robust against changes in user weight and height, verified through statistical analysis.
The paper titled “Joint-Angle Adaptive Coordination Control of a Serial-Parallel Lower Limb Rehabilitation Exoskeleton” introduces a control system for replicating human kinematics in rehabilitation [91]. The exoskeleton tackles the challenges of controlling a parallel mechanism and managing uncertainties from structural errors and external disturbances.
To address these issues, the authors propose an adaptive control strategy using a radial basis function (RBF) neural network. This approach improves robustness and compensates for uncertainties. The system features a multi-axis control setup with EtherCAT communication, using DC servo motors and real-time encoder feedback to track joint angles accurately.
The kinematic and dynamic models of the exoskeleton are developed using Lagrange energy method. Motion planning includes continuous path (CP) and point-to-point (PTP) modes, with specific equations for hip and knee joint movement. Experimental results validate the control method, showing bounded tracking errors and stable performance in both modes.
The RBF neural network-based adaptive controller compensates effectively for model uncertainties and external disturbances. Key contributions include a dynamic model for joint coordination, precise attitude measurement through sensors, and adaptive neural network control. Future research aims to optimize controller parameters to improve performance and adaptability in various rehabilitation scenarios.
The paper titled “Echo State Network-Enhanced Super-Twisting Control of Gait Training Exoskeleton Driven by Pneumatic Muscles” introduces a new control strategy for a passive gait training exoskeleton powered by pneumatic muscles. It focuses on improving control accuracy and robustness against disturbances [92]. The core innovation is the combination of an Echo State Network (ESN) with a Super-Twisting Controller (STC), forming the ESN-STC system. This approach addresses the challenges faced by traditional model-based controllers, which often struggle with uncertainties and external disturbances.
The study begins by modeling the exoskeleton’s dynamics, including uncertainties and disturbances. The ESN approximates these uncertainties, enabling a more robust control strategy. Sliding mode control (SMC) defines the sliding surface based on errors between desired and actual joint angles and velocities. Stability is verified using Lyapunov’s theorem, with a positive definite matrix supporting the integration of ESN and STC.
This study highlights the potential of using ESN in assistive robotics. The ESN-STC method is compared with traditional approaches like SMDO-STC (non-neural network) and RBF-STC (neural network). Results show that ESN-STC achieves superior tracking accuracy, lower computational complexity, and better handling of system uncertainties and disturbances. Simulations demonstrate improved trajectory tracking and disturbance rejection. Experimental results confirm its effectiveness, even in challenging conditions such as stumbles.
The paper “Development of an RBFN-Based Neural-Fuzzy Adaptive Control Strategy for an Upper Limb Rehabilitation Exoskeleton” presents a neural-fuzzy adaptive control strategy using a Radial Basis Function Network (RBFN) for an upper limb rehabilitation exoskeleton [93]. The system is designed to assist patients with motion impairments by enabling natural arm movements through seven actuated degrees of freedom.
The control strategy combines adaptive neural network control, fuzzy logic, and force feedback compensation. This integration ensures accurate trajectory tracking despite uncertainties and disturbances. Stability is validated using Lyapunov stability theory. The exoskeleton’s architecture includes a host control layer and a target control layer, implemented on industrial PCs. Real-time control is achieved by converting Simulink models into C code. Sensors measure joint positions and human-robot interaction forces to support precise operation.
Safety features include mechanical end-stops, a gravity-balanced design, and emergency shutdown buttons. Experimental results show that the RBFN-based control surpasses traditional methods like cascaded PID and fuzzy sliding mode controllers in position tracking accuracy and frequency response. Feedback from potentiometers and force/torque sensors enables tracking of predefined sinusoidal trajectories for shoulder, elbow, and wrist movements.
Tests on human subjects, including healthy individuals and stroke patients, confirm the system’s effectiveness in real-world applications. The study emphasizes the importance of adaptive control in rehabilitation robotics. Future work will focus on developing patient-active control strategies and incorporating hand rehabilitation. This research advances rehabilitation technology and aims to improve the quality of life for individuals with upper limb impairments.
The paper “Neural Network-Based Bounded Control of Robotic Exoskeletons without Velocity Measurements” introduces an innovative output feedback controller for robotic exoskeletons that achieves trajectory tracking without requiring velocity measurements [94]. The controller employs an adaptive feedforward neural network to manage unknown nonlinear dynamics using only position data. It ensures control commands remain bounded. The support adjusts based on user performance, demonstrating assist-as-needed behavior.
The control strategy employs a Radial Basis Function (RBF) neural network to address dynamic uncertainties. The exoskeleton’s dynamics include inertia, friction, and gravity effects. An auxiliary variable is introduced to aid controller design, ensuring bound commands and stable trajectory tracking. Simulations in MATLAB/Simulink and experiments on the TTI-Knuckle1 lower-limb exoskeleton validate the approach. This exoskeleton supports knee joint rehabilitation and walking tasks.
The results show effective joint trajectory tracking with minimal errors and smooth control efforts. Walking tests reveal that the proposed controller outperforms traditional PD-type and earlier neural network controllers. It achieves better tracking performance while requiring fewer sensors. The controller is robust against external torques and encourages active user participation in trajectory tracking.
The method is computationally efficient and ensures stability, making it ideal for rehabilitation applications. This study highlights the potential of the neural network-based controller to improve robotic exoskeleton functionality and enhance rehabilitation outcomes.
The paper “Task Performance-Based Adaptive Velocity Assist-as-Needed Control for an Upper Limb Exoskeleton” introduces the TPAVAAN controller, a novel approach designed to improve stroke rehabilitation through adaptive assistance [95]. This system combines a Position and Velocity-based Dynamic Impedance Controller (PVDIC) with a Neural Network-based Backstepping Learning Force Tracking and Dynamic Error Compensation (NN-BLFTDEC) loop.
The PVDIC calculates assistive forces based on the user's motor abilities, adapting the desired velocity to enhance rehabilitation efficiency and reduce injury risk. The NN-BLFTDEC uses a radial basis function neural network (RBFNN) to estimate and compensate for uncertainties in the exoskeleton's dynamics, ensuring accurate movement tracking. The TPAVAAN controller adjusts its assistance level by analyzing position tracking errors and assistive forces, promoting active user participation during rehabilitation tasks.
Co-simulation studies show the TPAVAAN controller reduces position tracking errors from 0.039 m to 0.013 m. It also increases the average energy function value, indicating greater user engagement compared to traditional controllers. This adaptive control strategy effectively supports users and adjusts to their changing motor abilities, fostering a more engaging rehabilitation process.
By tailoring assistance to individual patient needs, the TPAVAAN controller improves tracking accuracy and encourages active involvement. The study emphasizes the importance of personalized robotic assistance in achieving better rehabilitation outcomes for stroke patients.
The paper “Neural-Network-Based Nonlinear Model Predictive Tracking Control of a Pneumatic Muscle Actuator-Driven Exoskeleton” presents a neural-network-based nonlinear model predictive control (NN-NMPC) strategy for a lower limb exoskeleton [96]. It is driven by pneumatic muscle actuators (PMAs) and aimed at improving gait rehabilitation.
The authors use an Echo State Gaussian Process (ESGP) to model system dynamics, covering both PMA actuation and the exoskeleton’s mechanical structure. This modeling enables precise joint angle tracking during gait training by minimizing tracking errors and optimizing control signals. Stability analysis, simulations, and experimental validation with healthy subjects demonstrate the effectiveness of the NN-NMPC in managing the complexities of PMA-driven systems.
The proposed control strategy outperforms traditional PID methods, achieving better tracking accuracy for hip and knee joint angles, especially under varying input frequencies. Future research will focus on improving actuation response and sensor accuracy to enhance the human-robot interaction experience.
The article titled “Enhanced neural network control of lower limb rehabilitation exoskeleton by add-on repetitive learning” develops neural networks (NN) based control technique, enhanced with repetitive learning control (RLC) strategy for lower limb rehabilitation exoskeletons [97]. The primary objective is to improve trajectory tracking performance and adapt to the repetitive nature of rehabilitation exercises. This is crucial for effective therapy and ensuring user safety during interactions between humans and exoskeleton.
Two control schemes are proposed. The first uses a pure neural network to handle both periodic and non-periodic uncertainties in the system. It incorporates a combined error factor (CEF) to improve transient response and enhance safety. However, while the neural network can approximate a wide range of system uncertainties, it does not fully exploit the periodic nature of rehabilitation movements, which may affect tracking performance.
The second approach integrates an add-on RLC with the neural network. This combination leverages RLC's ability to learn and adapt to periodic uncertainties while the neural network addresses non-periodic factors. By combining these methods, the system achieves improved accuracy in trajectory tracking and better transient performance.
The stability of both control schemes is analyzed using Lyapunov theory. Simulation results show that the integrated NN and RLC controller outperforms the pure neural network control in terms of tracking accuracy and transient performance. Additionally, the system maintains stability and bounded performance even under various disturbances and uncertainties.
The study concludes that combining neural networks with repetitive learning control significantly enhances the functionality of rehabilitation exoskeletons. This approach can improve therapeutic outcomes and safety for users. Future research will focus on experimental validation and refining these control strategies for broader applications in rehabilitation robotics.
Xiong et al. present a single-layer learning-based predictive control strategy for a lower-limb exoskeleton driven by pneumatic muscle actuators (PMAs) [98]. PMAs are lightweight, compliant, and cost-effective, making them ideal for rehabilitation. However, their nonlinearities, hysteresis, and time-varying parameters make precise control challenging.
The proposed strategy employs an Echo State Network (ESN), a type of recurrent neural network, to model the complex dynamics of the PMA-driven exoskeleton. ESN predicts future system behaviors by learning from input-output data, eliminating the need for detailed theoretical models. Its ability to approximate nonlinear time-series data makes it well-suited for managing the dynamic properties of PMAs.
The control method combines predictive control principles with single-layer learning to calculate control signals over a finite future horizon. Stability is ensured through theoretical analysis, confirming the closed-loop system’s asymptotic stability when the ESN accurately approximates the exoskeleton’s dynamics. Simulations show that the ESN outperforms traditional multilayer perceptron (MLPs) in predicting complex dynamics in presence of noise.
Experiments with healthy subjects validate the strategy’s effectiveness in passive gait training. The system achieves accurate trajectory tracking for hip and knee joint movements, outperforming conventional PID and MLP-based controllers. The proposed method also demonstrates robustness across individuals with varying physical characteristics, highlighting its adaptability for rehabilitation applications.
The study concludes that the ESN-based predictive control strategy improves the precision and robustness of PMA-driven exoskeletons. Future research will aim to optimize control parameters and conduct broader clinical tests to confirm its practical benefits for patients with motor impairments.
The paper “Real-Time Locomotion Mode Recognition and Assistive Torque Control for Unilateral Knee Exoskeleton on Different Terrains” presents a hierarchical control system for a unilateral knee exoskeleton designed to improve mobility and rehabilitation for stroke survivors [99]. The system uses support vector machine (SVM) classifiers and data from two inertial measurement units (IMUs) to recognize gait modes, including standing, level-ground walking, stair ascending, and stair descending.
The control system operates on three levels. The high-level controller detects motion intention. The mid-level controller generates assistive torque based on the identified locomotion mode and gait phase. The low-level controller executes the desired motion. Experiments with five able-bodied subjects and one stroke patient showed high recognition accuracy, averaging 97.52% for able-bodied participants and 97.38% for the stroke patient. The system also demonstrated low detection delays, making it suitable for real-time applications.
Assistive torque control improved gait symmetry and stability, especially for the stroke patient, though some recognition errors occurred during transitions between gait modes. The study highlights the importance of real-time gait recognition and motion intent-based assistive torque in enhancing mobility for individuals with gait impairments.
Despite the promising results, the study acknowledges challenges, including the need for individualized model training and basic torque pattern design. Future research will focus on creating personalized control strategies and refining torque patterns to improve system effectiveness. This work contributes significantly to advancements in lower limb robotics and exoskeleton technology. The Table 1 summarizes the articles discussed in this section:
The next section will discuss the application of Intelligent Control methods in rehabilitation exoskeleton robots.
5.6. Hybrid Control System
Intelligent hybrid control systems in exoskeleton robots combine traditional control methods with advanced artificial intelligence (AI) techniques to offer both stability and adaptability in rehabilitation. By blending established controls like PID or Model Predictive Control (MPC) with intelligent components, such as neural networks or fuzzy logic, hybrid systems can benefit from the strengths of each approach. The traditional control elements provide a reliable, stable foundation for basic movement control, while the AI components enable real-time adaptability, learning from user interactions to tailor responses based on individual needs or changing conditions. For example, a hybrid system may use MPC to plan optimal trajectories while relying on a neural network to adapt these trajectories to specific user feedback or unexpected disturbances.
This layered approach allows hybrid systems to address the non-linear and dynamic nature of human movement, managing complex variations that might otherwise challenge single-method controllers. Through intelligent adaptation, the system can adjust to each user’s physical capabilities, motor control level, and rehabilitation progress. The AI elements of a hybrid control system learn from continuous sensor data, allowing the exoskeleton to improve over time without the need for manual reprogramming. Although intelligent hybrid control systems may require substantial computational resources, they hold great potential for enhancing the safety, efficiency, and personalization of rehabilitation exoskeletons, ultimately promoting more effective recovery outcomes for diverse user populations.
Aliman et al. present the development of an Adaptive-Fuzzy-Proportional-Derivative (Adaptive-FLC-PD) controller for a rehabilitation lower limb exoskeleton (RLLE) [100]. The controller addresses challenges like non-linear dynamics and tracking errors in multi-joint actuators. The exoskeleton uses a direct current motor as a joint actuator and includes a patient leg model to simulate passive rehabilitation exercises through trajectory tracking.
The Adaptive-FLC-PD controller combines fuzzy logic, adaptive control, and proportional-derivative elements. It uses a zero-order Takagi-Sugeno fuzzy model for inference, adjusting motor inputs based on the difference between desired and actual joint angles. Parameters are optimized through Particle Swarm Optimization (PSO), which iteratively refine them to reduce tracking errors and improve trajectory accuracy.
A key feature of the controller is its online tuning capability, enabled by Model Reference Adaptive Control (MRAC). This allows real-time parameter adjustments to eliminate steady-state errors, ensuring precise and responsive support. Stability is confirmed through Lyapunov’s method, demonstrating asymptotic stability. The research highlights the controller’s potential to enhance rehabilitation devices. Future work will focus on testing its effectiveness with actual prototypes and real patients.
Giovacchini et al. propose a lightweight bilateral active pelvis exoskeleton (APO) designed to assist hip flexion and extension during walking [101]. The APO is intended for individuals with mobility impairments, providing assistive power to the hips to support natural movement without restriction. It incorporates two series elastic actuators (SEAs) that deliver smooth assistive torque profiles. The device achieves a closed-loop torque control bandwidth of 15 Hz and an output impedance suited to human gait frequencies.
A key focus of the study is the APO's hybrid control system. It combines low-level torque control using a proportional-integral-derivative (PID) regulator with a high-level adaptive assistive strategy based on adaptive oscillators. Usability tests conducted with a healthy subject demonstrated the device's effectiveness in providing walking assistance. The exoskeleton features a comfortable human-robot interface with a wide contact area, ensuring stability and efficient torque transmission. Future research will evaluate the device’s impact on reducing user energy expenditure and validate its effectiveness in elderly individuals with gait impairments.
The paper “Fuzzy Enhanced Adaptive Admittance Control of a Wearable Walking Exoskeleton with Step Trajectory Shaping” introduces a control strategy aimed at improving human-robot interaction in wearable exoskeletons [102]. The approach combines adaptive control with fuzzy logic to dynamically adapt to the user’s walking intentions. This hybrid system addresses uncertainties and disturbances, enhancing the exoskeleton’s real-time performance and stability.
At the core of the strategy is an admittance model that shapes reference trajectories based on user-applied forces. This enables the exoskeleton to align its movements with the user’s intentions, creating a natural and intuitive interaction. An integral-type Lyapunov function controller ensures accurate tracking of these trajectories while compensating for unknown nonlinear disturbances. Fuzzy logic further enhances the system by approximating continuous functions and managing control input disturbances, ensuring stable gait and effective joint trajectory tracking.
The exoskeleton’s dynamics are modeled using the Euler-Lagrange method, incorporating joint angles, inertia, Coriolis forces, and gravitational effects. Stability during walking tasks is maintained using the Zero-Moment Point (ZMP) concept. Experiments with healthy subjects validated the system’s ability to shape step trajectories and maintain stability. It outperformed traditional PD controllers in reducing tracking errors and adapting to interaction forces.
The paper emphasizes the potential of fuzzy enhanced adaptive admittance control for long-term use in wearable exoskeletons. The study highlights the importance of real-time adaptation to user intentions, essential for rehabilitation and assistance applications. By integrating adaptive control and fuzzy logic, the system provides a robust solution for managing uncertainties and enhancing responsiveness to user needs.
The research paper “Humanoid control of lower limb exoskeleton robot based on human gait data with sliding mode neural network” presents a novel control system for lower limb exoskeletons designed to improve rehabilitation for individuals with lower extremity dysfunction [103]. The system uses human gait data and a sliding mode neural network to replicate human motion which facilitates the natural movement and increases flexibility of robotic-assisted therapy.
A humanoid model, based on human biomechanics, guides the exoskeleton’s movements. The control system employs a Radial Basis Function (RBF) neural network to manage uncertainties in the robot’s dynamic model and ensure adaptability and stability. Sliding mode control further improves response speed and stability. Lyapunov stability analysis validates the system’s stability, and a comfort evaluation function measures the similarity between the robot’s trajectory and human gait. This evaluation considers joint angles, velocities, and accelerations.
Simulation results show effective trajectory tracking with minimal errors and stable joint torques. High tracking accuracy is confirmed, especially for the knee joint, though the hip joint demonstrates slightly less optimal transient response characteristics. The study also uses a fuzzy C-means (FCM) clustering algorithm to analyze gait trajectories, identifying Fourier fitting as the most accurate method for trajectory data.
The research emphasizes the need for precise measurement of dynamic parameters and real-time feedback on human motion intentions for future development. The proposed control system provides a robust and adaptive solution to improve rehabilitation outcomes.
The paper “Output Constrained Control of Lower Limb Exoskeleton Based on Knee Motion Probabilistic Model with Finite-Time Extended State Observer” presents an advanced control strategy for lower limb exoskeletons designed to handle the variability and uncertainty of human gait [104]. It uses a Sparse Gaussian Process (SGP) to create a probabilistic model of knee motion based on hip motion. This model establishes time-varying constrained boundaries for knee positions to ensure safety and comfort.
A low-cost gait acquisition system, equipped with inertial measurement units (IMUs), collects data on hip and knee positions. This data is used to accurately predict knee movements. A key feature of the control system is the Finite-Time Extended State Observer (FESO). This estimates unmeasured joint velocities and compensates for system uncertainties. The FESO improves state estimation, enabling the control system to track desired joint positions while maintaining safety constraints.
The control strategy includes a backstepping controller that works with the FESO to manage joint positions within predefined limits. The study examines two control modes: online active and offline passive. Both models are validated through simulations and experiments with a healthy operator. Results show the system achieves effective tracking performance with low root-mean-square error (RMSE) and Pinball loss metrics, indicating high accuracy in probabilistic estimations.
This research provides a detailed framework to enhance the performance and safety of lower limb exoskeletons. By integrating advanced strategies such as SGP and FESO, it improves the coordination and safety of human-exoskeleton interactions during gait, accommodating uncertainties in knee motion.
The paper “Hybrid Filtered Disturbance Observer for Precise Motion Generation of a Powered Exoskeleton” introduces a hybrid filtered disturbance observer (HF-DOB) control framework for the WalkON Suit. It is a powered exoskeleton designed to assist individuals with complete paraplegia [105]. The HF-DOB addresses challenges in precise motion control caused by model uncertainties and disturbances during gait. Traditional methods like gain-switching and proportional-derivative (PD) control have struggled to manage disturbances from human behavior and environmental interactions.
The HF-DOB improves control performance by adaptively identifying the exoskeletal system using a hybrid nominal model. It employs model-based tracking controllers that switch according to the user’s gait phase. A novel allowance filter compensates for plant dynamics and ensures stability during digital implementation. The framework includes mathematical modeling of joint dynamics, feedforward filtering to adjust for zero dynamics, and model switching based on gait phases (stance and swing). This design enhances robustness by rejecting external forces and maintaining stability despite variations in model parameters.
The tracking controllers ensure precise performance and smooth transitions in motor torque during gait phase changes, enhancing user comfort and control. Experimental validation with a user with complete paraplegia showed an 80.74% reduction in root mean square error compared to previous models.
The paper “Research on Mechanical Leg Structure Design and Control System of Lower Limb Exoskeleton Rehabilitation Robot Based on Magnetorheological Variable Stiffness and Damping Actuator” presents a novel control system for lower limb exoskeletons designed to improve flexibility and stability during rehabilitation [106]. It introduces a fuzzy switch damping control strategy that combines variable stiffness and damping using magnetorheological (MR) technology. This approach addresses the challenges of impact forces and vibrations during walking, optimizing human displacement and acceleration.
The study begins with the design and mathematical modeling of a Variable Stiffness and Damping Actuator (VSDA). The VSDA incorporates magnetorheological dampers (MRDs) to manage impact forces and is modeled as a single-degree-of-freedom system. This design allows simultaneous adjustment of stiffness and damping. The fuzzy logic controller processes input variables such as human body velocity and relative velocity to produce output damping coefficients.
Simulation results in MATLAB/Simulink show that the fuzzy control approach outperforms traditional systems, providing improved control effectiveness under various excitation conditions. The study also analyzes the damping characteristics of two types of MRDs which show their nonlinear behavior influenced by displacement and input current. A switching damping control algorithm, inspired by the Skyhook control method, is proposed to improve stability and safety while walking.
The research emphasizes the importance of optimizing damping characteristics and notes the need for adjustments to meet individual user needs. Future work will focus on refining control parameters and rehabilitation strategies to improve user experience. The goal is to ensure the exoskeleton accommodates different user sizes and meets ergonomic standards.
The article titled “Control of a Robotic Knee Exoskeleton for Assistance Rehabilitation Based on Motion Intention from sEMG” describes the development and validation of a robotic knee exoskeleton designed to assist individuals with reduced mobility, especially those with neurological impairments (ALLOR) [107]. The control system uses human motion intention recognition (HMIR) based on surface electromyography (sEMG) signals from lower-limb and trunk muscles. It employs a finite state machine (FSM) to translate recognized intentions into actions and integrates various controllers, including admittance, velocity, and trajectory controllers, to support knee joint movements during activities like sitting, standing, walking, and knee flexion-extension.
The system was tested with ten healthy subjects to validate its performance. The results showed high classification accuracy for motion intentions, particularly for lower-limb muscles during sitting movements and trunk muscles during standing movements. Trunk muscles proved to be a viable alternative for controlling the exoskeleton, especially for recognizing movements like standing up and walking.
The article titled “Multi-modal control scheme for rehabilitation robotic exoskeletons” introduces a multi-modal control scheme for rehabilitation robotic exoskeletons driven by series elastic actuators (SEAs) [108]. These exoskeletons are designed to assist patients with stroke or brain injuries by enabling safe and effective therapeutic exercises. The study addresses challenges in maintaining stability in robotic systems that experience nonlinear dynamics and variable interaction forces.
The proposed control scheme integrates three modes: robot-assisted, robot-dominant, and safety-stop. In the robot-assisted mode, the robot follows human-initiated movements, providing support only as needed to encourage voluntary efforts. The robot-dominant mode activates when human movements deviate from expected trajectories. It allows the robot to guide the user back to proper motion patterns. The safety-stop mode ensures patient safety by halting the robot if interaction forces exceed safe limits.
The control system relies on regional position and force feedback to implement the "assist-as-needed" paradigm. The use of singular perturbation methods enables the separation of the system’s fast actuator dynamics from slower robotic movements, ensuring stability in real-time. Lyapunov stability analysis and Tikhonov’s theorem confirm the system’s robustness.
Experimental results demonstrate the scheme’s effectiveness in upper-limb and lower-limb robotic exoskeletons. The robot successfully transitions between control modes, supporting free movements, correcting deviations, and ensuring safety during high-force interactions. The system adapts to human needs, balancing support and autonomy to promote active participation.
The article titled “Real-Time EEG-EMG human-machine interface-based control system for a lower-limb exoskeleton” focuses on a novel control system for lower-limb exoskeletons based on a multimodal human-machine interface (HMI) integrating EEG and EMG signals [109]. It aims to enhance rehabilitation by enabling real-time exoskeleton control through brain and muscle activity.
The system uses EEG to decode motor imagery (MI) and EMG to detect muscle activity. It provides complementary information for robust movement prediction. EEG signals capture brain activity during MI, while EMG signals reflect physical muscle intentions. This dual-modality approach addresses limitations of single-mode systems, such as the EEG’s susceptibility to noise and EMG’s reduced reliability in patients with weak muscles.
The exoskeleton control combines these signals to predict motion intentions and execute precise movements. Experiments conducted with healthy subjects validated the system’s ability to distinguish between left and right leg movements, as well as rest states. The integration of EEG and EMG using logical combinations like "AND" and "OR" reduced false positives, improving overall safety and adaptability.
The study highlights the system’s adaptability to different rehabilitation stages. For early-stage patients with minimal muscular activity, EEG-based control dominates, while later-stage patients benefit from EMG-driven precision. Combining modalities enhances reliability and reduces risks, such as unintended exoskeleton movements.
The article titled "Development of a Model Reference Computed Torque Controller for a Human Lower Extremity Exoskeleton Robot" focuses on creating an effective control system to increase the functionality of exoskeleton robots designed for rehabilitation [110]. These robots are particularly useful in assisting patients with physical disabilities by providing precise, adaptive physical therapy tailored to individual recovery needs. The study highlights the critical role of control systems in ensuring smooth and accurate exoskeleton operation, particularly when dealing with nonlinear dynamics and uncertain parameters.
A novel Model Reference Computed Torque Controller (MRCTC) is proposed to address the limitations of traditional computed torque controllers (CTC). While the CTC is effective in theory, it heavily depends on accurate modeling of robot dynamics, making it less practical for rehabilitation robots that must adapt to varying payloads, friction, and human interactions. The MRCTC incorporates a dual-loop architecture to overcome these challenges. The inner loop calculates the required torque using the CTC scheme and feedback linearization, while the outer loop corrects the system's response to align with the reference model, compensating for discrepancies between the robot and its modeled parameters.
To build the controller, the study developed a 7-degree-of-freedom (DOF) dynamic model of the human lower extremity using the Lagrange method. This model is enhanced with a realistic friction model that accounts for Coulomb friction, viscous friction, and the Stribeck effect, accurately simulating the resistance encountered during joint movements. These features ensure the controller can adapt to real-world conditions, including dynamic disturbances and varying friction levels.
The Model Reference Computed Torque Controller effectively handles nonlinear dynamics and parameter uncertainties, making it well-suited for adaptive therapy applications. The MRCTC's stability is ensured through gain matrices derived from Routh-Hurwitz stability criteria, making the system robust against parameter uncertainties. Simulations conducted in MATLAB Simulink environment demonstrate the effectiveness of the control strategy. The controller exhibits excellent trajectory tracking for both sequential and simultaneous joint movements in the presence of modeling inaccuracies. Compared to conventional control methods, the MRCTC achieves better performance in terms of precision and stability.
The paper titled “Modular Design and Decentralized Control of the RECUPERA Exoskeleton for Stroke Rehabilitation” present a robotic exoskeleton designed to support stroke rehabilitation [111]. The system uses hybrid control architecture with three levels: First-Level, Mid-Level, and High-Level Control.
First-Level Control operates through Field Programmable Gate Arrays (FPGA). These provide precise control over the position, velocity, and current of the actuators. This approach ensures safety, modularity, and fast adjustments. Each actuator is managed locally by an Actuator Control Unit (ACU) connected to a real-time network.
Mid-Level Control leverages kinematic and dynamic models to deliver various rehabilitation therapies. Modes such as Gravity Compensation, Teach & Replay, and Master-Slave adapt to the user’s needs, mirroring movements and providing personalized support. This control is managed by ZynqBrain, a central processing system located in a backpack. ZynqBrain integrates processing and programmable logic to handle complex control tasks.
Safety is prioritized through mechanical end stops, emergency stops, and independent safety limits for each actuator. Experimental results show the system performs effectively, with low mean absolute errors in torque measurements and improved trajectory tracking. The Table 2 summarizes the articles discussed in this section:
6. Discussion
The advances in control techniques for rehabilitation exoskeleton robots have transformed how these systems support individuals with mobility impairments. This discussion explores the effectiveness, limitations, and future potential of various control methods used in rehabilitation exoskeletons, highlighting their contributions to safety, adaptability, and precision.
Robot dynamic modeling is foundational to all control strategies, as it defines the behavior and motion characteristics of the exoskeleton. Accurate modeling is essential for designing control algorithms that manage complex human-robot interactions. However, creating precise models remains challenging due to the diversity in patient physiology and unpredictable human movement. Consequently, adaptive control techniques have been developed to address some of these variations, adjusting in real-time to account for individual user dynamics and unexpected changes.
Overview of control systems reveals the growing complexity of exoskeleton architecture. Integrating various control types allows systems to enhance real-time response, improve interaction quality, and ensure safety during rehabilitation exercises. Often, these systems are designed with feedback mechanisms that make immediate adjustments based on user input or changes in the environment. This adaptability is crucial for maintaining user safety and comfort, as it enables the system to respond promptly and accurately to evolving needs and conditions during rehabilitation.
Computed Torque Control (CTC) is particularly useful in achieving precise trajectory tracking by directly computing the required torques based on dynamic models. However, CTC's reliance on accurate models can be a limitation, especially when interacting with diverse users who introduce variability in movement. The need for model precision means CTC may perform inconsistently when faced with deviations from the assumed dynamic model, which can be a drawback in real-world applications.
Adaptive Control addresses some limitations of CTC by adjusting parameters to accommodate system and user changes. This adaptability makes it well-suited for rehabilitation settings where patients exhibit varied and evolving movement patterns. While adaptive control enhances flexibility, it may struggle in environments where rapid and unpredictable changes occur, as adaptation can be slower than real-time demands. Nonetheless, adaptive control remains a promising approach, particularly for systems focused on personalization.
Robust Control techniques focus on maintaining system stability under uncertain conditions, which is invaluable in exoskeletons dealing with unpredictable external forces or inaccuracies in modeling. This type of control is particularly beneficial for users with fluctuating levels of mobility or strength. However, robust control methods can be conservative, prioritizing stability over responsiveness. For applications requiring fine-tuned, precise movements, robust control might limit flexibility.
Sliding Mode Control (SMC) combines robustness with responsiveness, allowing the system to "slide" along a predetermined trajectory even when disturbances occur. SMC’s ability to handle uncertainties and maintain stability makes it ideal for rehabilitation, where patients' movements can be unpredictable. However, one drawback of SMC is "chattering" small oscillations around the trajectory which can affect user comfort and system wear.
Linear Control and PID Control are traditional methods still prevalent due to their simplicity and reliability. While PID control provides effective regulation of speed and position, it may be less suitable for handling nonlinear dynamics common in human-robot interactions. For stable scenarios, PID remains a strong choice, but it can be limited when higher adaptability or complex motion is required.
Admittance Control plays a unique role in defining how the exoskeleton responds to external forces, creating a more intuitive and natural user experience. By allowing adjustments based on force, admittance control supports smoother human-robot interaction, which can be crucial for patient engagement and comfort during rehabilitation. However, admittance control is less effective in environments where sudden force changes occur, as it can lead to delays in response.
Model Predictive Control (MPC) and Linear Quadratic Regulator (LQR) offer predictive and optimized solutions. It balances criteria like precision, energy efficiency, and stability. MPC, by predicting future states, is beneficial in scenarios requiring anticipatory control, although its computational demands may limit real-time applications. LQR’s optimization of control actions supports smooth, efficient movement, although it is best suited for linear systems, limiting its use in highly dynamic, nonlinear settings.
PD Control provides a simple, effective solution for controlling position and velocity. Its ease of implementation and tuning make it valuable in many exoskeleton systems, though it lacks the complexity needed for complex or unpredictable motions.
Intelligent Control Systems incorporating Neural Network and Deep Learning-based controls have introduced adaptive learning capabilities. By analyzing patterns in movement, these systems offer tailored assistance, adjusting to patient-specific needs. However, their dependency on training data and computational complexity can be limiting. Similarly, Reinforcement Learning-based systems learn from trial and error, enabling personalized control. While promising, reinforcement learning requires extensive interaction data and has a slower learning curve, which may delay immediate application.
This review of control methods also underscores importance for hybrid systems that integrate different techniques to maximize performance. Future advancements will likely focus on combining model-based, adaptive, and intelligent methods to create systems capable of providing personalized, responsive, and safe support. As technology progresses, further research into real-time adaptability, computational efficiency, and seamless human-robot interaction will continue to enhance rehabilitation exoskeleton capabilities.
7. Future Directions
The rapid advancements in control techniques for rehabilitation exoskeleton robots emphasize key areas for future research. These include enhancing adaptability, improving user interaction, and refining control accuracy. Building on existing methods offers the potential to develop more personalized, responsive, and efficient exoskeletons tailored to individual needs.
Future research should prioritize improvements in dynamic modeling and the integration of intelligent systems. Dynamic modeling remains a critical area for advancement, as current models often fail to accurately represent the complex physical interactions between humans and robots. Enhancing these methods could lead to more realistic depictions of human biomechanics, particularly for users with unique motor impairments. Additionally, developing adaptive models capable of learning from real-time data may enable continuous adjustments based on patient-specific movement and interaction patterns.
The overview of control systems suggests a future need for hybrid and flexible architectures. Control systems in exoskeletons will likely evolve toward frameworks that can incorporate multiple control methods. This allows the robot to switch between them based on the user’s condition or specific task requirements. Modular control system architectures could also enable easy adjustments, making it simpler to implement upgrades or customizations that meet the evolving needs of individual patients.
Computed Torque Control (CTC), although precise, can benefit from advancements in model precision. Researchers could focus on reducing the model dependency of CTC through hybrid methods that combine CTC with adaptive or robust controls, making it more resilient to unmodeled dynamics. This hybrid approach would enhance trajectory tracking while reducing the risks associated with modeling errors, resulting in safer interactions for users.
Adaptive Control will continue to be valuable, particularly if improved to handle faster and more unpredictable changes in patient behavior. Developing adaptive systems that can better anticipate user actions and make quicker adjustments would allow exoskeletons to accommodate a wider range of users, including those with highly variable movements. Further research in combining adaptive control with learning-based approaches could create systems capable of continuous refinement based on individual user progress.
Robust Control techniques could be expanded to handle increasingly complex and variable patient scenarios. Future research might focus on achieving a balance between robustness and responsiveness. It allows the system to handle uncertainties without compromising on user comfort. Exploring robust control methods that can maintain stable operations even with significant variability in user input will be essential for broadening exoskeleton applications.
Sliding Mode Control (SMC) presents a promising area for refinement, especially in minimizing chattering, a known limitation in user comfort. Future directions could focus on reducing chattering through advanced filtering techniques or hybrid methods, blending SMC with other control types for smoother operations. Additionally, using SMC in combination with adaptive or intelligent controls might further reduce oscillations, enhancing both stability and user comfort.
Linear Control and PID Control remain simple and effective but may benefit from more research in hybrid configurations. As foundational control methods, they can be combined with more sophisticated techniques to handle nonlinear dynamics. This offers an accessible yet adaptable solution for many rehabilitation scenarios.
PD Control has potential in hybrid systems where its simplicity can complement more advanced methods, offering control stability in less demanding scenarios. Future research could investigate combining PD control with intelligent systems to enhance stability and adaptiveness for diverse movement patterns.
Admittance Control could be enhanced to offer more dynamic force-response behaviors. It allows for smoother and more natural interaction. Future research might focus on creating adaptive admittance control systems that automatically adjust based on the user’s strength and movement needs. By improving real-time force responsiveness, admittance control can provide a more intuitive experience. It will enable patients to feel more in control of the exoskeleton.
Model Predictive Control (MPC) and Linear Quadratic Regulator (LQR) techniques show promise for high-precision control, though computational demands are a current limitation. Future work may explore lightweight versions of these algorithms or leverage faster computing hardware to make MPC and LQR viable in real-time applications. Integrating MPC with machine learning algorithms could allow it to predict user actions more accurately, further enhancing rehabilitation exercises.
The integration of Intelligent Control Systems, including Neural Network and Deep Learning-based controls, will likely shape the future of rehabilitation exoskeletons. By enabling real-time pattern recognition, these systems allow for highly personalized assistance. Future research might explore reducing their dependency on extensive data and computational resources to enable faster learning.
In summary, future research should focus on hybrid and adaptive systems that combine the strengths of multiple control techniques, which can make exoskeletons operate safely, responsively, and effectively across diverse rehabilitation scenarios. By increasing adaptability, improving computational efficiency, and advancing intelligent control integration, rehabilitation exoskeletons can become more tailored to individual patient needs, promoting effective and engaging rehabilitation experiences.
8. Conclusions
This review explored recent advancements in control techniques for rehabilitation exoskeleton robots. The study highlights how these developments contribute to safe, adaptable, and precise assistance for individuals with mobility impairments. Robot dynamic modeling is essential in creating accurate representations of the exoskeleton’s behavior, which supports the development of effective control strategies. An overview of robot control systems showed that hybrid and flexible architectures are crucial for adapting to various patient needs.
Among the discussed control methods, Computed Torque Control and Adaptive Control enable precise and personalized movements by accommodating complex dynamics and individual variations. Robust Control and Sliding Mode Control (SMC) enhance system stability under uncertainty, although SMC could benefit from further refinement to minimize chattering and improve comfort.
Traditional methods, such as PID Control and Linear Control, remain valuable for their simplicity and reliability, while Admittance Control enhances the naturalness of human-robot interactions by regulating response to external forces. Control techniques like Model Predictive Control (MPC) and Linear Quadratic Regulator (LQR) offer optimal solutions, though computational demands currently limit their real-time use. Future research should focus on developing more personalized, efficient, and accessible control systems, incorporating advanced technologies like neural networks and reinforcement learning for enhanced adaptability. This review lays a strong foundation for advancing rehabilitation, aiming to improve mobility and the quality of life for individuals with motor impairments.
Author Contributions
Gazi Abdullah Mashud: literature review, methodology design, data curation, data analysis, manuscript drafting, revision and rewriting. SK Hasan: conceptualization, manuscript drafting, figure preparation and revision and rewriting. Nafizul Alam: revision and rewriting. Each author has read and approved the final version of the manuscript and agrees to be accountable for all aspects of the work.
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors
Acknowledgments
The authors would like to express their gratitude to the Mechanical and Manufacturing Engineering Department, College of Engineering and Computing, Miami University for providing the resources and facilities necessary for this research.
Conflicts of Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this manuscript.
References
- Cao, J.; Xie, S.Q.; Das, R.; Zhu, G.L. Control strategies for effective robot assisted gait rehabilitation: The state of art and future prospects. Med Eng. Phys. 2014, 36, 1555–1566. [Google Scholar] [CrossRef]
- Chen, L.; Xie, H.; Liu, Z.; Li, B.; Cheng, H. Exploring Challenges and Opportunities of Wearable Robots: A Comprehensive Review of Design, Human-Robot Interaction and Control Strategy. APSIPA Trans. Signal Inf. Process. 2023, 12. [Google Scholar] [CrossRef]
- M. R. Tucker et al., “Control strategies for active lower extremity prosthetics and orthotics: A review,” J Neuroeng Rehabil, vol. 12, no. 1, pp. 1–30, Jan. 2015. [CrossRef]
- Liu, C.; Guo, K.; Lu, J.; Yang, H. A review on the application of intelligent control strategies for post-stroke hand rehabilitation machines. Adv. Mech. Eng. 2023, 15. [Google Scholar] [CrossRef]
- Wang, W.; Ren, H.; Ci, Z.; Yuan, X.; Zhang, P.; Wang, C. Control Method of Upper Limb Rehabilitation Exoskeleton for Better Assistance: A Comprehensive Review. J. Field Robot. 2024. [Google Scholar] [CrossRef]
- G. Masengo, X. G. Masengo, X. Zhang, R. Dong, A. B. Alhassan, K. Hamza, and E. Mudaheranwa, “Lower limb exoskeleton robot and its cooperative control: A review, trends, and challenges for future research,” Front Neurorobot, vol. 16, p. 913748, Jan. 2023. [Google Scholar] [CrossRef]
- Su, D.; Hu, Z.; Wu, J.; Shang, P.; Luo, Z. Review of adaptive control for stroke lower limb exoskeleton rehabilitation robot based on motion intention recognition. Front. Neurorobotics 2023, 17, 1186175. [Google Scholar] [CrossRef]
- Fu, J.; Choudhury, R.; Hosseini, S.M.; Simpson, R.; Park, J.-H. Myoelectric Control Systems for Upper Limb Wearable Robotic Exoskeletons and Exosuits—A Systematic Review. Sensors 2022, 22, 8134. [Google Scholar] [CrossRef] [PubMed]
- Baud, R.; Manzoori, A.R.; Ijspeert, A.; Bouri, M. Review of control strategies for lower-limb exoskeletons to assist gait. J. Neuroeng. Rehabilitation 2021, 18, 1–34. [Google Scholar] [CrossRef]
- Brown, D.F.; Xie, S.Q. Effectiveness of Intelligent Control Strategies in Robot-Assisted Rehabilitation—A Systematic Review. IEEE Trans. Neural Syst. Rehabilitation Eng. 2024, 32, 1828–1840. [Google Scholar] [CrossRef]
- Bauer, G.; Pan, Y.-J. Review of Control Methods for Upper Limb Telerehabilitation With Robotic Exoskeletons. IEEE Access 2020, 8, 203382–203397. [Google Scholar] [CrossRef]
- de Miguel-Fernández, J.; Lobo-Prat, J.; Prinsen, E.; Font-Llagunes, J.M.; Marchal-Crespo, L. Control strategies used in lower limb exoskeletons for gait rehabilitation after brain injury: a systematic review and analysis of clinical effectiveness. J. Neuroeng. Rehabilitation 2023, 20, 1–28. [Google Scholar] [CrossRef]
- Yao, Y.; Shao, D.; Tarabini, M.; Moezi, S.A.; Li, K.; Saccomandi, P. Advancements in Sensor Technologies and Control Strategies for Lower-Limb Rehabilitation Exoskeletons: A Comprehensive Review. Micromachines 2024, 15, 489. [Google Scholar] [CrossRef] [PubMed]
- Qassim, H.M.; Hasan, W.Z.W. A Review on Upper Limb Rehabilitation Robots. Appl. Sci. 2020, 10, 6976. [Google Scholar] [CrossRef]
- Gasperina, S.D.; Roveda, L.; Pedrocchi, A.; Braghin, F.; Gandolla, M. Review on Patient-Cooperative Control Strategies for Upper-Limb Rehabilitation Exoskeletons. Front. Robot. AI 2021, 8, 745018. [Google Scholar] [CrossRef]
- Wang, W.; Ren, H.; Ci, Z.; Yuan, X.; Zhang, P.; Wang, C. Control Method of Upper Limb Rehabilitation Exoskeleton for Better Assistance: A Comprehensive Review. J. Field Robot. 2024. [Google Scholar] [CrossRef]
- J. J. . Craig, “Introduction to robotics : mechanics and control,” 2022, Accessed: Nov. 29, 2024. [Online]. Available: https://books.google.com/books/about/Introduction_to_Robotics_Global_Edition.html?id=Bjw1EAAAQBAJ.
- Hasan, S.; Dhingra, A.K. Development of a model reference computed torque controller for a human lower extremity exoskeleton robot. Proc. Inst. Mech. Eng. Part I: J. Syst. Control. Eng. 2021, 235, 1615–1637. [Google Scholar] [CrossRef]
- Han, S.; Wang, H.; Tian, Y.; Christov, N. Time-delay estimation based computed torque control with robust adaptive RBF neural network compensator for a rehabilitation exoskeleton. ISA Trans. 2020, 97, 171–181. [Google Scholar] [CrossRef]
- Narayan, J.; Abbas, M.; Patel, B.; Dwivedy, S.K. Adaptive RBF neural network-computed torque control for a pediatric gait exoskeleton system: an experimental study. Intell. Serv. Robot. 2023, 16, 549–564. [Google Scholar] [CrossRef]
- Sabet, S.; Dabiri, A.; Armstrong, D.G.; Poursina, M. Computed Torque Control of the Stewart platform with uncertainty for lower extremity robotic rehabilitation. 2017 American Control Conference (ACC). LOCATION OF CONFERENCE, USADATE OF CONFERENCE; pp. 5058–5064.
- Dao, Q.-T.; Yamamoto, S.-I. Modified Computed Torque Control of a Robotic Orthosis for Gait Rehabilitation. 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). LOCATION OF CONFERENCE, United StatesDATE OF CONFERENCE; pp. 1719–1722.
- Han, S.; Wang, H.; Tian, Y. Adaptive computed torque control based on RBF network for a lower limb exoskeleton. 2018 15th International Workshop on Advanced Motion Control (AMC). LOCATION OF CONFERENCE, JapanDATE OF CONFERENCE; pp. 35–40.
- Mungai, M.E.; Grizzle, J.W. Feedback Control Design for Robust Comfortable Sit-to-Stand Motions of 3D Lower-Limb Exoskeletons. IEEE Access 2020, 9, 122–161. [Google Scholar] [CrossRef]
- Hasan, S.K. A Realistic Model Reference Computed Torque Control Strategy for Human Lower Limb Exoskeletons. Actuators 2024, 13, 445. [Google Scholar] [CrossRef]
- Jiang, Z.; Wang, Z.; Lv, Q.; Yang, J. Impedance Learning-Based Hybrid Adaptive Control of Upper Limb Rehabilitation Robots. Actuators 2024, 13, 220. [Google Scholar] [CrossRef]
- Cai, S.; Xie, P.; Li, G.; Xie, L. Compensation-corrective adaptive control strategy for upper-limb rehabilitation robots. Robot. Auton. Syst. 2024, 177. [Google Scholar] [CrossRef]
- Alibeji, N.A.; Molazadeh, V.; Moore-Clingenpeel, F.; Sharma, N. A Muscle Synergy-Inspired Control Design to Coordinate Functional Electrical Stimulation and a Powered Exoskeleton ARTIFICIAL GENERATION OF SYNERGIES TO REDUCE INPUT DIMENSIONALITY. IEEE Control. Syst. 2018, 38, 35–60. [Google Scholar] [CrossRef]
- Han, Y.; Zhu, S.; Zhou, Y.; Gao, H. An admittance controller based on assistive torque estimation for a rehabilitation leg exoskeleton. Intell. Serv. Robot. 2019, 12, 381–391. [Google Scholar] [CrossRef]
- Hasan, S.K.; Dhingra, A.K. An adaptive controller for human lower extremity exoskeleton robot. Microsyst. Technol. 2021, 27, 2829–2846. [Google Scholar] [CrossRef]
- Pan, C.-T.; Lee, M.-C.; Huang, J.-S.; Chang, C.-C.; Hoe, Z.-Y.; Li, K.-M. Active Assistive Design and Multiaxis Self-Tuning Control of a Novel Lower Limb Rehabilitation Exoskeleton. Machines 2022, 10, 318. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, H.; Tian, Y. Adaptive interaction torque-based AAN control for lower limb rehabilitation exoskeleton. ISA Trans. 2021, 128, 184–197. [Google Scholar] [CrossRef]
- Casas, J.; Chang, C.-H.; Duenas, V.H. Switched Concurrent Learning Adaptive Control for Treadmill Walking Using a Lower Limb Hybrid Exoskeleton. IEEE Trans. Control. Syst. Technol. 2023, 32, 174–188. [Google Scholar] [CrossRef]
- Kagirov, I.; Kapustin, A.; Kipyatkova, I.; Klyuzhev, K.; Kudryavcev, A.; Kudryavcev, I.; Loskutov, Y.; Ryumin, D.; Karpov, A. Medical exoskeleton “Remotion” with an intelligent control system: Modeling, implementation, and testing. Simul. Model. Pr. Theory 2020, 107, 102200. [Google Scholar] [CrossRef]
- Zhang, S.; Guan, X.; Ye, J.; Chen, G.; Zhang, Z.; Leng, Y. Gait Deviation Correction Method for Gait Rehabilitation With a Lower Limb Exoskeleton Robot. IEEE Trans. Med Robot. Bionics 2022, 4, 754–763. [Google Scholar] [CrossRef]
- Amiri, M.S.; Ramli, R.; Ibrahim, M.F. Genetically optimized parameter estimation of mathematical model for multi-joints hip–knee exoskeleton. Robot. Auton. Syst. 2020, 125, 103425. [Google Scholar] [CrossRef]
- Amiri, M.S.; Ramli, R.; Barari, A. Optimally Initialized Model Reference Adaptive Controller of Wearable Lower Limb Rehabilitation Exoskeleton. Mathematics 2023, 11, 1564. [Google Scholar] [CrossRef]
- Chen, C.; Huang, J.; Tu, X. Design and single-parameter adaptive fuzzy control of pneumatic lower limb exoskeleton with full state constraints. Robotica 2022, 41, 995–1014. [Google Scholar] [CrossRef]
- Brahmi, B.; Ahmed, T.; El Bojairami, I.; Swapnil, A.A.Z.; Zaman, A.U.; Schultz, K.; McGonigle, E.; Rahman, M.H. Flatness Based Control of a Novel Smart Exoskeleton Robot. IEEE/ASME Trans. Mechatronics 2021, 27, 974–984. [Google Scholar] [CrossRef]
- Chang, C.-H.; Casas, J.; Duenas, V.H. Closed-Loop Kinematic and Indirect Force Control of a Cable-Driven Knee Exoskeleton: A Lyapunov-Based Switched Systems Approach. IEEE Open J. Ultrason. Ferroelectr. Freq. Control. 2023, 2, 171–184. [Google Scholar] [CrossRef]
- Sharifi, M.; Mehr, J.K.; Mushahwar, V.K.; Tavakoli, M. Autonomous Locomotion Trajectory Shaping and Nonlinear Control for Lower Limb Exoskeletons. IEEE/ASME Trans. Mechatronics 2022, 27, 645–655. [Google Scholar] [CrossRef]
- Guzmán, C.H.; Blanco, A.; Brizuela, J.A.; Gómez, F.A. Robust control of a hip–joint rehabilitation robot. Biomed. Signal Process. Control. 2017, 35, 100–109. [Google Scholar] [CrossRef]
- Han, J.; Yang, S.; Xia, L.; Chen, Y.-H. Deterministic Adaptive Robust Control With a Novel Optimal Gain Design Approach for a Fuzzy 2-DOF Lower Limb Exoskeleton Robot System. IEEE Trans. Fuzzy Syst. 2020, 29, 2373–2387. [Google Scholar] [CrossRef]
- Zhang, T.; Huang, H. Design and Control of a Series Elastic Actuator With Clutch for Hip Exoskeleton for Precise Assistive Magnitude and Timing Control and Improved Mechanical Safety. IEEE/ASME Trans. Mechatronics 2019, 24, 2215–2226. [Google Scholar] [CrossRef]
- Al-Awad, N.A.; Humaidi, A.J.; Al-Araji, A.S. Fractional multi-loop active disturbance rejection control for a lower knee exoskeleton system. Acta Polytech. 2023, 63, 158–170. [Google Scholar] [CrossRef]
- Wu, J.; Gao, J.; Song, R.; Li, R.; Li, Y.; Jiang, L. The design and control of a 3DOF lower limb rehabilitation robot. Mechatronics 2016, 33, 13–22. [Google Scholar] [CrossRef]
- Wang, Y.; Tian, Y.; Guo, Y.; Wang, H. Active torque-based gait adjustment multi-level control strategy for lower limb patient–exoskeleton coupling system in rehabilitation training. Math. Comput. Simul. 2023, 215, 357–381. [Google Scholar] [CrossRef]
- Long, Y.; Du, Z.; Cong, L.; Wang, W.; Zhang, Z.; Dong, W. Active disturbance rejection control based human gait tracking for lower extremity rehabilitation exoskeleton. ISA Trans. 2017, 67, 389–397. [Google Scholar] [CrossRef]
- Yang, S.; Pei, J.; Liu, Y.; Chen, Y.-H. Robust tracking control design with a novel leakage-type adaptive mechanism for an uncertain lower limb exoskeleton robot. J. Vib. Control. 2022, 29, 2681–2695. [Google Scholar] [CrossRef]
- Li, J.; Wang, Q.; Fang, Y. Adaptive neural network-based practical predefined-time nonsingular terminal sliding mode control for upper limb rehabilitation robots. Commun. Nonlinear Sci. Numer. Simul. 2024, 136. [Google Scholar] [CrossRef]
- Long, Y.; Peng, Y. Extended State Observer-Based Nonlinear Terminal Sliding Mode Control With Feedforward Compensation for Lower Extremity Exoskeleton. IEEE Access 2022, 10, 8643–8652. [Google Scholar] [CrossRef]
- Hsu, S.-H.; Changcheng, C.; Lee, H.-J.; Chen, C.-T. Design and Implementation of a Robotic Hip Exoskeleton for Gait Rehabilitation. Actuators 2021, 10, 212. [Google Scholar] [CrossRef]
- Wu, H.; Jia, T.; Li, N.; Wu, J.; Yan, L. Study on the control algorithm for lower limb exoskeleton based on ADAMS/Simulink co-simulation. J. Vibroengineering 2017, 19, 2976–2986. [Google Scholar] [CrossRef]
- Hasan, S.; Dhingra, A.K. Biomechanical design and control of an eight DOF human lower extremity rehabilitation exoskeleton robot. Results Control. Optim. 2022, 7, 100107. [Google Scholar] [CrossRef]
- He, D.; Wang, H.; Tian, Y.; Ma, X. Model-free finite-time robust control using fractional-order ultra-local model and prescribed performance sliding surface for upper-limb rehabilitation exoskeleton. ISA Trans. 2024, 147, 511–526. [Google Scholar] [CrossRef]
- Zhou, Y.; Sun, Z.; Chen, B.; Huang, G.; Wu, X.; Wang, T. Human gait tracking for rehabilitation exoskeleton: adaptive fractional order sliding mode control approach. Intell. Robot. 2023, 3, 95–112. [Google Scholar] [CrossRef]
- Hasan, S.; Dhingra, A.K. Development of a sliding mode controller with chattering suppressor for human lower extremity exoskeleton robot. Results Control. Optim. 2022, 7. [Google Scholar] [CrossRef]
- Mohan, S.; Mohanta, J.; Kurtenbach, S.; Paris, J.; Corves, B.; Huesing, M. Design, development and control of a 2PRP-2PPR planar parallel manipulator for lower limb rehabilitation therapies. Mech. Mach. Theory 2017, 112, 272–294. [Google Scholar] [CrossRef]
- Ben Abdallah, I.; Bouteraa, Y. An Optimized Stimulation Control System for Upper Limb Exoskeleton Robot-Assisted Rehabilitation Using a Fuzzy Logic-Based Pain Detection Approach. Sensors 2024, 24, 1047. [Google Scholar] [CrossRef]
- Tanyildizi, A.K.; Yakut, O.; Taşar, B.; Tatar, A.B. Control of twin-double pendulum lower extremity exoskeleton system with fuzzy logic control method. Neural Comput. Appl. 2021, 33, 8089–8103. [Google Scholar] [CrossRef]
- Zhang, P.; Zhang, J.; Elsabbagh, A. Fuzzy radial-based impedance controller design for lower limb exoskeleton robot. Robotica 2022, 41, 326–345. [Google Scholar] [CrossRef]
- He, Y.; Li, N.; Wang, C.; Xia, L.-Q.; Yong, X.; Wu, X.-Y. Development of a novel autonomous lower extremity exoskeleton robot for walking assistance. Front. Inf. Technol. Electron. Eng. 2019, 20, 318–329. [Google Scholar] [CrossRef]
- Bergmann, L.; Lück, O.; Voss, D.; Buschermöhle, P.; Liu, L.; Leonhardt, S.; Ngo, C. Lower Limb Exoskeleton With Compliant Actuators: Design, Modeling, and Human Torque Estimation. IEEE/ASME Trans. Mechatronics 2022, 28, 758–769. [Google Scholar] [CrossRef]
- Ajjanaromvat, N.; Parnichkun, M. Trajectory tracking using online learning LQR with adaptive learning control of a leg-exoskeleton for disorder gait rehabilitation. Mechatronics 2018, 51, 85–96. [Google Scholar] [CrossRef]
- Hasan, S.K.; Dhingra, A. Developing a Linear Quadratic Regulator for Human Lower Extremity Exoskeleton Robot. J. Mechatronics Robot. 2022, 6, 28–46. [Google Scholar] [CrossRef]
- Yatsun, S.F.; Mal’chikov, A.V.; Yatsun, A.S. A Method for Obtaining the Parameters for Changing the Settings of the Control System of a Rehabilitation Device. Biomed. Eng. 2023, 1–5. [Google Scholar] [CrossRef]
- Orekhov, G.; Luque, J.; Lerner, Z.F. Closing the Loop on Exoskeleton Motor Controllers: Benefits of Regression-Based Open-Loop Control. IEEE Robot. Autom. Lett. 2020, 5, 6025–6032. [Google Scholar] [CrossRef] [PubMed]
- Yan, Y.; Chen, Z.; Huang, C.; Guo, Q. Modelling and analysis of coupling dynamics of swinging a lower limb exoskeleton. Nonlinear Dyn. 2022, 111, 1213–1234. [Google Scholar] [CrossRef]
- Yu, S.; Liu, C.; Ye, C.; Fu, R. Passive and Active Training Control of an Omnidirectional Mobile Exoskeleton Robot for Lower Limb Rehabilitation. Actuators 2024, 13, 202. [Google Scholar] [CrossRef]
- Keemink, A.Q.L.; van Oort, G.; Wessels, M.; Stienen, A.H.A. Differential Inverse Kinematics of a Redundant 4R Exoskeleton Shoulder Joint. IEEE Trans. Neural Syst. Rehabilitation Eng. 2018, 26, 817–829. [Google Scholar] [CrossRef]
- Pan, J.; Astarita, D.; Baldoni, A.; Dell'Agnello, F.; Crea, S.; Vitiello, N.; Trigili, E. NESM-γ: An Upper-Limb Exoskeleton With Compliant Actuators for Clinical Deployment. IEEE Robot. Autom. Lett. 2022, 7, 7708–7715. [Google Scholar] [CrossRef]
- A. K. Tanyıldızı, “A three-DoF upper limb exoskeleton’s design, modeling, and interaction-based control,” Journal of the Brazilian Society of Mechanical Sciences and Engineering, vol. 45, no. 9, pp. 1–17, Sep. 2023. [CrossRef]
- Li, Y.; Guan, X.; Han, X.; Tang, Z.; Meng, K.; Shi, Z.; Penzlin, B.; Yang, Y.; Ren, J.; Yang, Z.; et al. Design and Preliminary Validation of a Lower Limb Exoskeleton With Compact and Modular Actuation. IEEE Access 2020, 8, 66338–66352. [Google Scholar] [CrossRef]
- Joyo, M.K.; Raza, Y.; Ahmed, S.F.; Billah, M.M.; Kadir, K.; Naidu, K.; Ali, A.; Yusof, Z.M. Optimized Proportional-Integral-Derivative Controller for Upper Limb Rehabilitation Robot. Electronics 2019, 8, 826. [Google Scholar] [CrossRef]
- Pillai, B.M.; Owatchaiyapong, P.; Treratanakulchai, S.; Sivaraman, D.; Ongwattanakul, S.; Suthakorn, J. Lower Limb Exoskeleton With Energy-Storing Mechanism for Spinal Cord Injury Rehabilitation. IEEE Access 2023, 11, 133850–133866. [Google Scholar] [CrossRef]
- Lee, H.J.; Kim, K.-S.; Kim, S. Generalized Control Framework for Exoskeleton Robots by Interaction Force Feedback Control. Int. J. Control. Autom. Syst. 2021, 19, 3419–3427. [Google Scholar] [CrossRef]
- Guzmán-Valdivia, C.; Blanco-Ortega, A.; Oliver-Salazar, M.; Gómez-Becerra, F.; Carrera-Escobedo, J. HipBot – The design, development and control of a therapeutic robot for hip rehabilitation. Mechatronics 2015, 30, 55–64. [Google Scholar] [CrossRef]
- Zarrin, R.S.; Zeiaee, A.; Langari, R. A Variable-Admittance Assist-As-Needed Controller for Upper-Limb Rehabilitation Exoskeletons. IEEE Robot. Autom. Lett. 2024, 9, 5903–5910. [Google Scholar] [CrossRef]
- Yu, F.; Liu, Y.; Wu, Z.; Tan, M.; Yu, J. Adaptive Gait Training of a Lower Limb Rehabilitation Robot Based on Human–Robot Interaction Force Measurement. Think. Ski. Creativity 2024, 5, 0115. [Google Scholar] [CrossRef]
- Li, Z.; Huang, B.; Ye, Z.; Deng, M.; Yang, C. Physical Human–Robot Interaction of a Robotic Exoskeleton By Admittance Control. IEEE Trans. Ind. Electron. 2018, 65, 9614–9624. [Google Scholar] [CrossRef]
- Ranatunga, I.; Lewis, F.L.; Popa, D.O.; Tousif, S.M. Adaptive Admittance Control for Human–Robot Interaction Using Model Reference Design and Adaptive Inverse Filtering. IEEE Trans. Control. Syst. Technol. 2016, 25, 278–285. [Google Scholar] [CrossRef]
- Yan, Y.; Tang, M.; Wang, W.; Zhang, Y.; An, B. Trajectory tracking control of wearable upper limb rehabilitation robot based on Laguerre model predictive control. Robot. Auton. Syst. 2024, 179. [Google Scholar] [CrossRef]
- Bao, X.; Sheng, Z.; Dicianno, B.E.; Sharma, N. A Tube-Based Model Predictive Control Method to Regulate a Knee Joint With Functional Electrical Stimulation and Electric Motor Assist. IEEE Trans. Control. Syst. Technol. 2020, 29, 2180–2191. [Google Scholar] [CrossRef]
- Rodriguez, C.A.; Ponce, P.; Molina, A. ANFIS and MPC controllers for a reconfigurable lower limb exoskeleton. Soft Comput. 2016, 21, 571–584. [Google Scholar] [CrossRef]
- Hasan, S. Radial basis function-based exoskeleton robot controller development. IET Cyber-Systems Robot. 2022, 4, 228–250. [Google Scholar] [CrossRef]
- S. Hasan, “Deep Learning Technology-Based Exoskeleton Robot Controller Development,” Sep. 2022, Accessed: Dec. 02, 2024. [Online]. Available: https://arxiv.org/abs/2209.12133v2.
- Huang, M.; Huang, X.; Tu, X.; Li, Z.; Wen, Y. An online gain tuning proxy-based sliding mode control using neural network for a gait training robotic orthosis. Clust. Comput. 2016, 19, 1987–2000. [Google Scholar] [CrossRef]
- Dan, Y.; Ge, Y.; Wang, A.; Li, Z. Human-Gait-Based Tracking Control for Lower Limb Exoskeleton Robot. J. Robot. Mechatronics 2022, 34, 615–621. [Google Scholar] [CrossRef]
- Hasan, S. Radial basis function-based exoskeleton robot controller development. IET Cyber-Systems Robot. 2022, 4, 228–250. [Google Scholar] [CrossRef]
- S. Hasan, “Deep Learning Technology-Based Exoskeleton Robot Controller Development,” Sep. 2022, Accessed: Dec. 03, 2024. [Online]. Available: https://arxiv.org/abs/2209.12133v2.
- Shi, D.; Zhang, W.; Wang, L.; Zhang, W.; Feng, Y.; Ding, X. Joint-Angle Adaptive Coordination Control of a Serial-Parallel Lower Limb Rehabilitation Exoskeleton. IEEE Trans. Med Robot. Bionics 2022, 4, 775–784. [Google Scholar] [CrossRef]
- Zhang, M.; Huang, J.; Cao, Y.; Xiong, C.-H.; Mohammed, S. Echo State Network-Enhanced Super-Twisting Control of Passive Gait Training Exoskeleton Driven by Pneumatic Muscles. IEEE/ASME Trans. Mechatronics 2022, 27, 5107–5118. [Google Scholar] [CrossRef]
- Wu, Q.; Wang, X.; Chen, B.; Wu, H. Development of an RBFN-based neural-fuzzy adaptive control strategy for an upper limb rehabilitation exoskeleton. Mechatronics 2018, 53, 85–94. [Google Scholar] [CrossRef]
- Asl, H.J.; Narikiyo, T.; Kawanishi, M. Neural network-based bounded control of robotic exoskeletons without velocity measurements. Control. Eng. Pr. 2018, 80, 94–104. [Google Scholar] [CrossRef]
- Guo, Y.; Wang, H.; Tian, Y.; Caldwell, D.G. Task performance-based adaptive velocity assist-as-needed control for an upper limb exoskeleton. Biomed. Signal Process. Control. 2022, 73. [Google Scholar] [CrossRef]
- Cao, Y.; Huang, J. Neural-network-based nonlinear model predictive tracking control of a pneumatic muscle actuator-driven exoskeleton. Ieee/caa J. Autom. Sin. 2020, 7, 1478–1488. [Google Scholar] [CrossRef]
- Yang, Y.; Huang, D.; Dong, X. Enhanced neural network control of lower limb rehabilitation exoskeleton by add-on repetitive learning. Neurocomputing 2018, 323, 256–264. [Google Scholar] [CrossRef]
- Cao, Y.; Huang, J.; Xiong, C. Single-Layer Learning-Based Predictive Control With Echo State Network for Pneumatic-Muscle-Actuators-Driven Exoskeleton. IEEE Trans. Cogn. Dev. Syst. 2020, 13, 80–90. [Google Scholar] [CrossRef]
- Liu, X.; Wang, Q. Real-Time Locomotion Mode Recognition and Assistive Torque Control for Unilateral Knee Exoskeleton on Different Terrains. IEEE/ASME Trans. Mechatronics 2020, 25, 2722–2732. [Google Scholar] [CrossRef]
- Aliman, N.; Ramli, R.; Haris, S.M.; Amiri, M.S.; Van, M. A robust adaptive-fuzzy-proportional-derivative controller for a rehabilitation lower limb exoskeleton. Eng. Sci. Technol. Int. J. 2022, 35. [Google Scholar] [CrossRef]
- Giovacchini, F.; Vannetti, F.; Fantozzi, M.; Cempini, M.; Cortese, M.; Parri, A.; Yan, T.; Lefeber, D.; Vitiello, N. A light-weight active orthosis for hip movement assistance. In Proceedings of the Robotics and Autonomous Systems; Elsevier: Amsterdam, The Netherlands, 2015; Volume 73, pp. 123–134. [Google Scholar]
- Huang, P.; Li, Z.; Zhou, M.; Li, X.; Cheng, M. Fuzzy Enhanced Adaptive Admittance Control of a Wearable Walking Exoskeleton With Step Trajectory Shaping. IEEE Trans. Fuzzy Syst. 2022, 30, 1541–1552. [Google Scholar] [CrossRef]
- Yu, J.; Zhang, S.; Wang, A.; Li, W.; Ma, Z.; Yue, X. Humanoid control of lower limb exoskeleton robot based on human gait data with sliding mode neural network. CAAI Trans. Intell. Technol. 2022, 7, 606–616. [Google Scholar] [CrossRef]
- Chen, Z.; Guo, Q.; Li, T.; Yan, Y. Output Constrained Control of Lower Limb Exoskeleton Based on Knee Motion Probabilistic Model With Finite-Time Extended State Observer. IEEE/ASME Trans. Mechatronics 2023, 28, 2305–2316. [Google Scholar] [CrossRef]
- Park, K.-W.; Choi, J.; Kong, K. Hybrid Filtered Disturbance Observer for Precise Motion Generation of a Powered Exoskeleton. IEEE Trans. Ind. Electron. 2022, 70, 646–656. [Google Scholar] [CrossRef]
- Zhao, C.; Liu, Z.; Zheng, C.; Zhu, L.; Wang, Y. Research on Mechanical Leg Structure Design and Control System of Lower Limb Exoskeleton Rehabilitation Robot Based on Magnetorheological Variable Stiffness and Damping Actuator. Actuators 2024, 13, 132. [Google Scholar] [CrossRef]
- Villa-Parra, A.C.; Delisle-Rodriguez, D.; Botelho, T.; Mayor, J.J.V.; Delis, A.L.; Carelli, R.; Neto, A.F.; Bastos, T.F. Control of a robotic knee exoskeleton for assistance and rehabilitation based on motion intention from sEMG. Res. Biomed. Eng. 2018, 34, 198–210. [Google Scholar] [CrossRef]
- Li, X.; Pan, Y.; Chen, G.; Yu, H. Multi-modal control scheme for rehabilitation robotic exoskeletons. Int. J. Robot. Res. 2017, 36, 759–777. [Google Scholar] [CrossRef]
- Gordleeva, S.Y.; Lobov, S.A.; Grigorev, N.A.; Savosenkov, A.O.; Shamshin, M.O.; Lukoyanov, M.V.; Khoruzhko, M.A.; Kazantsev, V.B. Real-Time EEG–EMG Human–Machine Interface-Based Control System for a Lower-Limb Exoskeleton. IEEE Access 2020, 8, 84070–84081. [Google Scholar] [CrossRef]
- Hasan, S.; Dhingra, A.K. Development of a model reference computed torque controller for a human lower extremity exoskeleton robot. Proc. Inst. Mech. Eng. Part I: J. Syst. Control. Eng. 2021, 235, 1615–1637. [Google Scholar] [CrossRef]
- Kumar, S.; Wöhrle, H.; Trampler, M.; Simnofske, M.; Peters, H.; Mallwitz, M.; Kirchner, E.A.; Kirchner, F. Modular Design and Decentralized Control of the Recupera Exoskeleton for Stroke Rehabilitation. Appl. Sci. 2019, 9, 626. [Google Scholar] [CrossRef]
Figure 4.
Architecture of a Sliding Mode Controller.
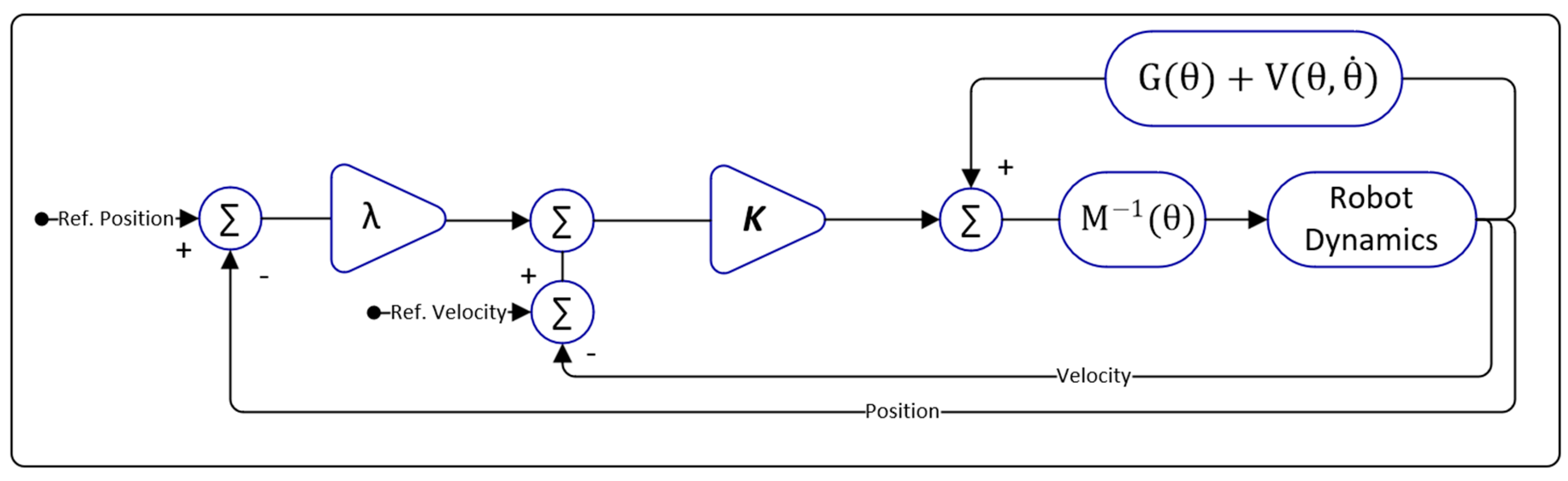
Figure 5.
Architecture of a Sliding Mode Controller with chattering suppressor.
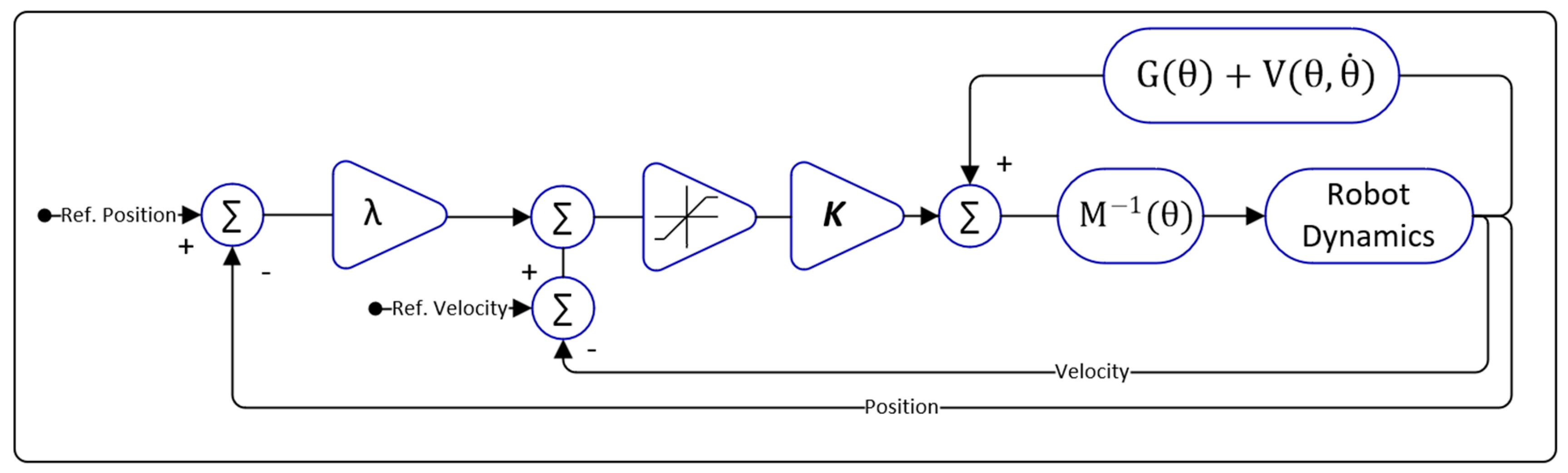
Table 1.
Summaries of articles which use Computed Torque control.
| Degrees of Freedom (DOF) | Control Techniques | Reference |
| 12 | Time-delay estimation-based computed torque control with adaptive RBFNN compensator system. | [19] |
| 6 | Adaptive RBF neural network-computed torque control system for pediatric gait exoskeletons. | [20] |
| 6 | Polynomial Chaos Expansion-integrated computed torque control system for Stewart platform rehabilitation. | [21] |
| 2 | Modified computed torque control system with fractional-order derivatives for PAM-based orthosis. | [22] |
| 12 | Adaptive computed torque control system with RBF neural networks for exoskeletons. | [23] |
| 18 | Quadratic programming-based computed torque control system for sit-to-stand exoskeletons. | [24] |
| 7 | Realistic Model Reference Computed Torque Controller for adaptive exoskeleton rehabilitation robotics. | [25] |
Table 2.
Summaries of the articles which use Adaptive Control method.
| Degrees of Freedom (DOF) | Control Technique | Reference |
| Not Specified | Impedance learning-based hybrid adaptive control system for upper limb robots. | [26] |
| 4 | Compensation-corrective adaptive control system for upper limb robotic assistance. | [27] |
| 4 | Synergy-inspired adaptive control system for hybrid FES-powered exoskeleton gait restoration. | [28] |
| 2 | Adaptive frequency oscillator-based control system for hemiplegic gait rehabilitation exoskeleton. | [29] |
| 7 | Direct adaptive control system for 7-DOF lower extremity rehabilitation exoskeleton. | [30] |
| 4 | Multi-axis self-tuning control system for motor-driven lower-limb exoskeleton. | [31] |
| Not Specified | Adaptive interaction torque-based assist-as-needed control system with nonlinear observer. | [32] |
| 4 | Switched concurrent learning adaptive control system for hybrid treadmill exoskeletons. | [33] |
| Not Specified | Control system with adaptive drive for medical lower-limb exoskeleton. | [34] |
| 8 | Gait deviation correction method-based control system for stroke rehabilitation exoskeletons. | [35] |
| 4 | Genetic algorithm-based parameter estimation system for hip-knee exoskeleton control. | [36] |
| 4 | Optimally initialized incremental model reference adaptive control system for exoskeletons. | [37] |
| 1 | Single-parameter adaptive fuzzy control system for pneumatic lower limb exoskeletons. | [38] |
Table 3.
Summaries of the articles which use Robust Control methods.
| Degrees of Freedom (DOF) | Control Technique | Reference |
| 7 | Differential flatness-based control system for smart upper limb rehabilitation exoskeleton. | [39] |
| Not Specified | Closed-loop kinematic and indirect force control system for cable-driven knee exoskeleton. | [40] |
| Not Specified | Adaptive central pattern generator-based nonlinear control system for lower limb exoskeletons. | [41] |
| 5 | Generalized proportional integral control system for hip-joint rehabilitation robot. | [42] |
| 2 | Deterministic adaptive robust control system with fuzzy optimization for 2-DOF exoskeletons. | [43] |
| 6 | Series elastic actuator with clutch control system for hip exoskeletons. | [44] |
| 1 | Fractional multi-loop active disturbance rejection control system for knee exoskeletons. | [45] |
| 3 | Adaptive robust control system for 3DOF lower limb rehabilitation robot. | [46] |
| Not Specified | Multi-level adaptive control system with ACPG and TDE for rehabilitation exoskeletons. | [47] |
| 2 | Active disturbance rejection control system with ESO for gait tracking exoskeletons. | [48] |
| 2 | Leakage-type adaptive robust control system for uncertain lower limb exoskeletons. | [49] |
Table 4.
Summaries of the articles which use Sliding Mode control system.
| Degrees of Freedom (DOF) | Control Technique | Reference |
| 5 | Adaptive neural network-based predefined-time sliding mode control for upper-limb robots. | [50] |
| 7 | Extended state observer-based nonlinear terminal sliding mode control for exoskeletons. | [51] |
| 4 | Linear extended state observer-based fast terminal sliding mode control for hip exoskeletons. | [52] |
| Not Specified | Sliding mode control system with ADAMS/Simulink co-simulation for lower limb exoskeletons. | [53] |
| 8 | Eight-DOF lower limb exoskeleton with super-twisting sliding mode control system. | [54] |
| 7 | Fractional-order finite-time robust control system for upper limb rehabilitation exoskeletons. | [55] |
| 2 | Adaptive fractional-order fast terminal sliding mode control for gait tracking exoskeletons. | [56] |
| 7 | Sliding mode control system with chattering suppressor for lower limb exoskeletons. | [57] |
| 3 | Non-singular fast terminal sliding mode control system for 2PPR-2PRP rehabilitation manipulator. | [58] |
Table 5.
Summaries of the articles which use Fuzzy Logic-based Control system.
| Degrees Of Freedom (DOF) | Control Technique | Reference |
| 2 | Fuzzy logic-based optimized stimulation control system for upper limb rehabilitation. | [59] |
| 2 | Fuzzy logic control system for twin-double pendulum lower limb exoskeleton. | [60] |
| 6 | Fuzzy radial-based impedance control system for six-DOF lower limb exoskeletons. | [61] |
Table 6.
Summaries of the articles which use Linear Quadratic Regulator.
| Degrees of Freedom (DOF) | Control Technique | Reference |
| 10 | Zero Moment Point preview control with multi-modal EEG/EMG sensors for autonomous exoskeleton. | [62] |
| 6 | Linear Quadratic Gaussian and Unscented Kalman Filter control system for compliant lower limb exoskeletons. | [63] |
| Not Specified | Online learning LQR with adaptive iterative learning control for gait exoskeleton. | [64] |
| 7 | Linear Quadratic Regulator control system for trajectory tracking in lower limb exoskeletons. | [65] |
Table 7.
Summaries of the articles which use PD Control method.
| Degrees of Freedom (DOF) | Control Technique | Reference |
| Not Specified | Proportional-differential control system for lower limb exoskeleton trajectory tracking. | [66] |
| Not Specified | Regression-based open-loop motor control system for cable-driven exoskeletons. | [67] |
| 4 | Proportional-derivative feedback control system for lower limb exoskeleton swing dynamics. | [68] |
Table 9.
Summaries of the articles which use Admittance Control method.
| Degrees of Freedom (DOF) | Control Technique | Reference |
| 8 | Variable-admittance assist-as-needed control system for upper-limb exoskeletons. | [78] |
| 6 | Admittance control system with interaction force measurement for adaptive lower-limb rehabilitation robot. | [79] |
| Not Specified | Adaptive admittance control system for human-robot interaction in robotic exoskeletons. | [80] |
| 7 | Adaptive admittance control with model reference design and inverse filtering for pHRI. | [81] |
Table 10.
Summaries of the articles which use Model Predictive Control method.
| Degrees of Freedom (DOF) | Control Technique | Reference |
| 2 | Laguerre function-based model predictive control for trajectory tracking in upper limb exoskeletons. | [82] |
| Not Specified | Tube-based nonlinear model predictive control for knee joint regulation in neuro-prosthesis systems. | [83] |
| 8 | ANFIS and model predictive control for reconfigurable lower limb exoskeletons. | [84] |
Table 1.
Summaries of the articles which use Intelligent Control system.
| Degrees of Freedom (DOF) | Control Technique | Reference |
| 4 | Neural network-based sliding mode control for Pneumatic Artificial Muscle-powered robotic orthosis. | [87] |
| 6 | Adaptive radial basis function network with feed-forward control for lower-limb exoskeletons. | [88] |
| 7 | Radial basis function neural network-based control system for lower-limb exoskeletons. | [89] |
| 7 | Deep learning-based hybrid control system with PD feedback for lower-limb exoskeletons. | [90] |
| 3 | Radial basis function neural network-based adaptive coordination control for lower-limb exoskeleton. | [91] |
| Not Specified | Echo State Network-enhanced super-twisting control for pneumatic muscle-driven gait exoskeleton. | [92] |
| 7 | RBFN-based neural-fuzzy adaptive control for upper limb rehabilitation exoskeletons. | [93] |
| 2 | Neural network-based bounded control for robotic exoskeletons without velocity measurements. | [94] |
| 7 | Task performance-based adaptive velocity assist-as-needed control for upper limb exoskeleton. | [95] |
| Not Specified | Neural-network-based nonlinear model predictive control for pneumatic muscle actuator-driven exoskeleton. | [96] |
| Not Specified | Enhanced neural network control with repetitive learning for lower limb rehabilitation exoskeletons. | [97] |
| 2 | Single-layer learning-based predictive control with Echo State Network for PMA-driven exoskeletons. | [98] |
| Not Specified | Hierarchical control system with real-time locomotion mode recognition for knee exoskeleton. | [99] |
Table 2.
Summaries of the articles which use Hybrid Control system
| Degrees of Freedom (DOF) | Control Technique | Reference |
| Not Specified | Adaptive-fuzzy-PD control system with online tuning for lower limb exoskeletons. | [100] |
| Not Specified | Hybrid torque control with adaptive oscillators for bilateral active pelvis exoskeleton. | [101] |
| 10 | Fuzzy-enhanced adaptive admittance control for wearable exoskeletons with step trajectory shaping. | [102] |
| 2 | Sliding mode neural network control system for humanoid lower limb exoskeletons. | [103] |
| 2 | Probabilistic knee motion model with finite-time observer for exoskeleton control. | [104] |
| Not Specified | Hybrid Filtered Disturbance Observer control system for adaptive exoskeleton motion stabilization. | [105] |
| 1 | Fuzzy-switch damping control system with magnetorheological actuators for exoskeleton stability. | [106] |
| Not Specified | Motion-intention recognition control system using sEMG signals for knee exoskeleton rehabilitation. | [107] |
| 1 | Multi-modal control scheme with SEAs for adaptable rehabilitation exoskeleton operation. | [108] |
| Not Specified | EEG-EMG multimodal control system for real-time lower-limb exoskeleton rehabilitation. | [109] |
| 7 | Model Reference Computed Torque Controller for adaptive lower-limb exoskeleton rehabilitation. | [110] |
| 3 | Hybrid modular control system with decentralized FPGA-based actuators for exoskeleton rehabilitation. | [111] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



