Submitted:
05 December 2024
Posted:
06 December 2024
You are already at the latest version
Abstract
The public security patrol path planning plays an important role in public security work, however, existing public security patrol path planning has varying degrees of shortcomings. To address these shortcomings, this paper proposes a public security patrol path planning recommendation method based on an improved wolf-pack optimization algorithm (S3PRM-DAF-BRS-CWOA). Firstly, an optimization objective function regarding the public security patrol path planning(S3P-Function) was abstracted based on the actual situation; Secondly, this paper proposed an improved wolf-pack optimization algorithm named DAF-BRS-CWOA using Dynamic-Adjustment-Factor(DAF) and Balanced-Raid-Strategy(BRS), and DAF devoted to adjust the overall wolf-pack running strategy by dynamically adjusting the number of airdropped wolves during the stage of Summon-Raid while BRS with symmetric property was to improve both the algorithm's global exploration as well as the local development capabilities by increasing the number of checking locations, that means not only checking the reverse position of the current wolf, but also the positions generated according to certain rules between the reverse position of the current wolf and the current optimal wolf during the stage of Summon-Raid; Finally, DAF-BRS-CWOA was adopted to optimize S3P-Function, forming a public security patrol path planning recommendation method based on DAF-BRS-CWOA (S3PRM-DAF-BRS-CWOA). Comparative and numerical experiments with four similar swarm intelligence optimization algorithms (PSO, GA, WDX-WPOA and DAF-BRS-CWOA) were conducted on 20 public datasets as well as the proposed S3P-Function, and the experimental results demonstrated that S3PRM-DAF-BRS-CWOA has superior performance as same as DAF-BRS-CWOA.
Keywords:
1. Introduction
2. Related Works
2.1. Swarm Intelligence Optimization
2.2. Wolf-Pack Optimization Algorithm
2.3. Data-Sets
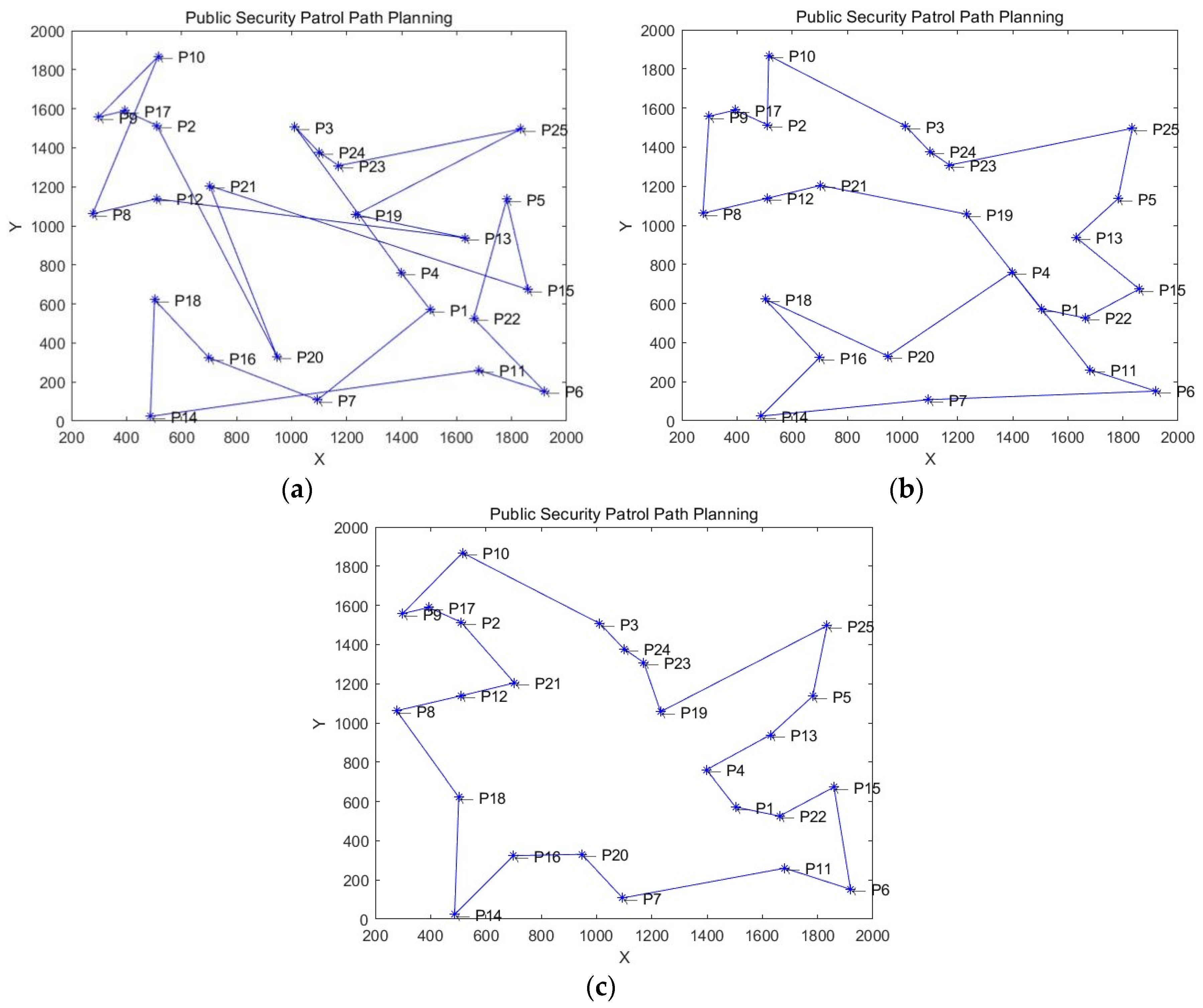
2.4. S3P-Function
3. Improvement and Design of the New Proposed Method
3.1. Dynamic-Adjustment-Factor
3.2. Balanced-Raid-Strategy
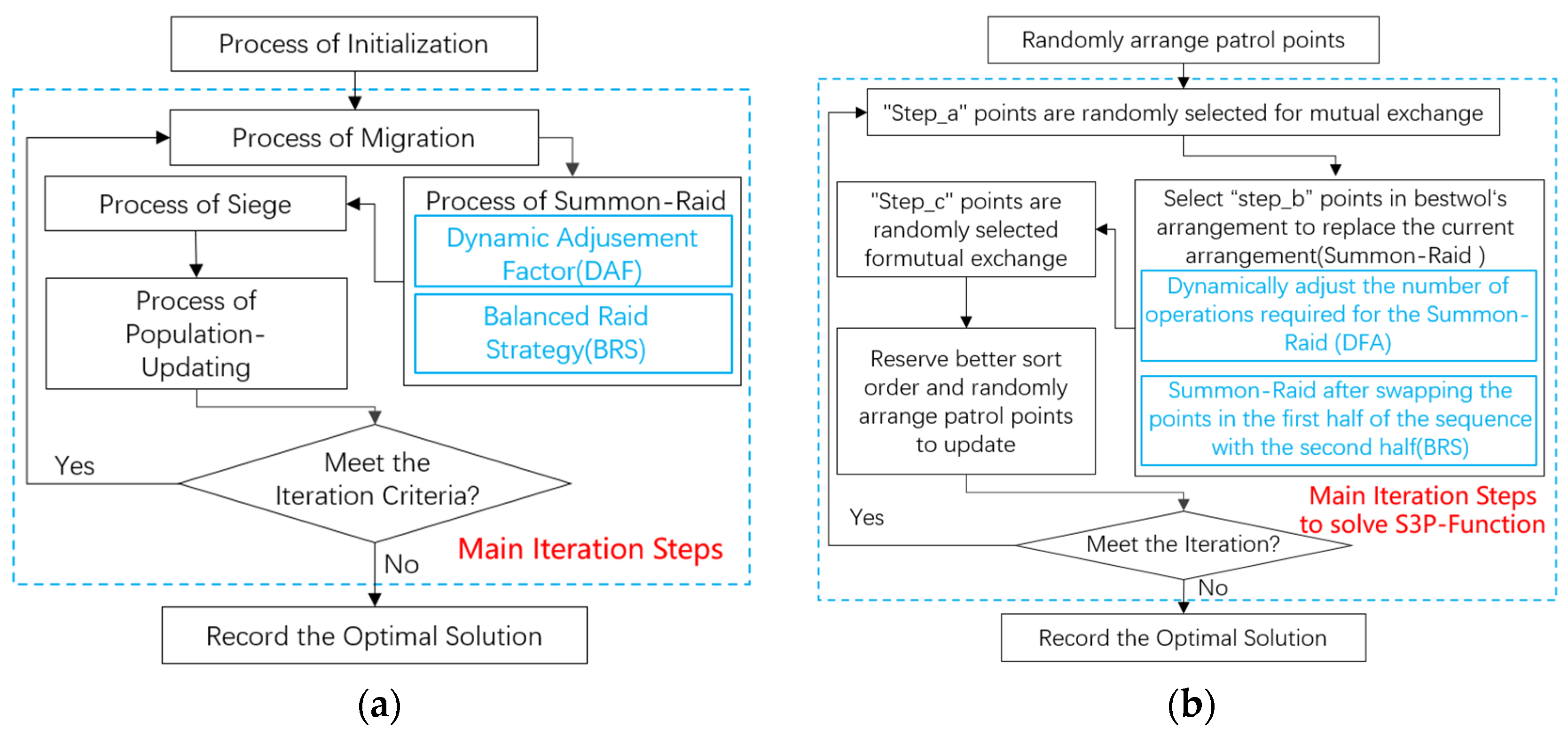
3.3. Steps Of DAF-BRS-CWOA
4. Performance Verification Experiment
4.1. Experimental Designment
4.2. Experimental Results and Analysis
5. Conclusions
Acknowledgments
References
- Wang, C., Wang, S., Song, S., Wang, K, Wu, S., &Huang, G. (2023). Multi unmanned ship path planning method and simulation for maritime patrol. Chinese Journal of Image and Graphics, 28(8), 2536-2548.
- Xiang, R., Zhu M., &Xu, L. (2022). Planning Method for Multi UAV Highway Patrol Tasks. Radio Engineering (007), 052.
- Li, L. (2020). Research and Application Development of Traffic Police Patrol Route Optimization Based on Open-Source GIS and Rural Postman Problem (Doctoral dissertation, East China Normal University).
- Zhang, L., Fan X. (2020). Key patrol route planning under ant colony algorithm. Practice and Understanding of Mathematics, 50(16), 9.
- Kong, L., Zhang, G., Su, Z., &Jiang, J. (2018). Ambulance emergency rescue path planning based on improved ant colony algorithm. Computer Engineering and Applications.
- Jie, Yi., Gu, Yi. (2017). Multi agent reinforcement learning police patrol path planning based on Stackelberg strategy. Journal of Beijing Institute of Technology 37(1), 7.
- Liang, J. (2024). Optimization of Tourist Park Sightseeing Path Planning Based on Improved Ant Colony Algorithm. Control and Information Technology.
- Shi, W., Fu, Y., Zhao, X., Liu, H., &Li, P. (2021). Research on Patrol Task Allocation and Path Optimization Method Based on Multi Agent. Journal of the Chinese Academy of Electronic Sciences, 16(7), 6.
- Yan, Z., He, Li., &Li, J. (2017). Multi domain limited multi AUV patrol route planning method. Journal of Underwater Unmanned Systems, 25(4), 6.
- Mukhopadhyay, A., Zhang, C., Vorobeychik, Y., Tambe, M., Pence, K., & Speer, P. (2016). Optimal allocation of police patrol resources using a continuous-time crime model. In Decision and Game Theory for Security: 7th International Conference, GameSec 2016, New York, NY, USA, November 2-4, 2016, Proceedings 7 (pp. 139-158). Springer International Publishing.
- Zhang, L., Gao, T., Cai, G., & Hai, K. L. (2022). Research on electric vehicle charging safety warning model based on back propagation neural network optimized by improved gray wolf algorithm. Journal of Energy Storage, 49, 104092. [CrossRef]
- Tang, D., Huang, C., Xiang, X., Zhou, H., Zhu, S., & Hu, T. (2023). Behavior automatic analysis for wolf pack hunting: making fast behavior analysis of massive data possible. Behavioral Ecology and Sociobiology, 77(6), 67. [CrossRef]
- Duan, H., Yang, Q., Deng, Y., Li, P., Qiu, H., Zhang, T., ... & Shen, Y. (2019). Unmanned aerial systems coordinate target allocation based on wolf behaviors. Science China. Information Sciences, 62(1), 14201. [CrossRef]
- Yao, K., Sun, J., Chen, C., Cao, Y., Xu, M., Zhou, X., ... & Tian, Y. (2023). An information entropy-based grey wolf optimizer. Soft Computing, 27(8), 4669-4684. [CrossRef]
- Chen, S., & Zheng, J. (2024). A hybrid grey wolf optimizer for engineering design problems. Journal of Combinatorial Optimization, 47(5), 86. [CrossRef]
- Wang, Z., & Zhang, J. (2022). A task allocation algorithm for a swarm of unmanned aerial vehicles based on bionic wolf pack method. Knowledge-Based Systems, 250, 109072. [CrossRef]
- She, A., Wang, L., Peng, Y., & Li, J. (2023, November). Structural reliability analysis based on improved wolf pack algorithm AK-SS. In Structures (Vol. 57, p. 105289). Elsevier. [CrossRef]
- H, W., Wen, J., & Xu, Z. (2024) Underwater robot submarine cable positioning algorithm based on improved grey wolf swarm optimization algorithm. Control and decision-making1-7.
- Cortes C , Vapnik V .Support-Vector Networks[J].Machine Learning, 1995, 20(3):273-297. [CrossRef]
- YANG X S. A new metaheuristic bat-inspired algo rithm[J]. Computer knowledge & technology, 2010, 284: 65-74.
- Yang C, Tu X, Chen J.Algorithm of marriage in honey bees optimi zation based on the wolf-pack search[C] //International Conference on Intelligent Pervasive Computing.Jeju: IEEE Computer Society, 2007: 11-13.
- Wang, D. , Qian, X. , Liu, K. , & Ban, X. . (2018). An Adaptive Shrinking Grid Search Chaos Wolf Optimization Algorithm with Adaptive Standard-Deviation Updating Amount.
- Wang, D. , Qian, X. , Liu, K. , Ban, X. , & Guan, X. . (2018). An adaptive distributed size wolf-pack optimization algorithm using strategy of jumping for raid (september 2018). IEEE Access, PP, 1-1. [CrossRef]

| Order | Function | Expression | Dimension | Range | Optimum |
|---|---|---|---|---|---|
| 1 | Ackley | 2 | [-32.768, 32.768] | Min f=0 | |
| 2 | Bukin6 | 2 | [-15, 3] | Min f=0 | |
| 3 | Drop-Wave | 2 | [-5.12, 5.12] | Min f=-1 | |
| 4 | Eggholder | 2 | [-512, 512] | Min f=-959.6407 | |
| 5 | Griewank | 2 | [-600, 600] | Min f=0 | |
| 6 | Levy | 2 | [-10, 10] | Min f=0 | |
| 7 | Levy13 | 2 | [-10, 10] | Min f=0 | |
| 8 | Rastrigin | 2 | [-5.12, 5.12] | Min f=0 | |
| 9 | Schaffer2 | 2 | [-100, 100] | Min f=0 | |
| 10 | Bohachevsky1 | 2 | [-100, 100] | Min f=0 | |
| 11 | Perm0-d-β | 2 | [-2, 2] | Min f=0 | |
| 12 | Rotated Hyper-Ellipsoid | 2 | [-65.536, 65.536] | Min f=0 | |
| 13 | Sum Squares | 2 | [-10, 10] | Min f=0 | |
| 14 | Trid | 2 | [-4, 4] | Min f=2 | |
| 15 | Booth | 2 | [-10, 10] | Min f=0 | |
| 16 | Matyas | 2 | [-10, 10] | Min f=0 | |
| 17 | Zakharov | 2 | [-5, 10] | Min f=0 | |
| 18 | Easom | 2 | [-4, 4] | Min f=-1 | |
| 19 | Eggcrate | 2 | [-π, π] | Min f=0 | |
| 20 | Bohachevsky3 | 2 | [-100, 100] | Min f=0 |
| Order | Algorithm Name | Configuration |
|---|---|---|
| 1 | GA | Crossover probability is 0.8, the mutation probability is 0.01, the max iteration T=600. |
| 2 | PSO | Inertia weight is 0.5, the Cognitive coefficient is 1.5, the social coefficient is 1.5, the max iteration T=600. |
| 3 | WDX-WPOA | Initial value of search step size step_a0 =1.5; the initial max value of siege step size step_cmax= 1e6 and the minimum value of siege step size step_cmin = 1e-40; the max iteration T=600; the amount of the wolf population N=50. |
| 4 | DAF-BRS-CWOA | Initial value of search step size step_a0 =1.5; the initial max value of siege step size step_cmax= 1e6 and the minimum value of siege step size step_cmin = 1e-40; the max iteration T=600; the amount of the wolf population N=50. |
| Function | Algorithm | Optimal Value | Worst Value | Average Value | Standard Deviation | Average Iteration | Average Time |
|---|---|---|---|---|---|---|---|
| 1 Ackley min f=0 | GA | 7.92E-06 | 0.00012803 | 0.000051735 | 6.95E-10 | 176.7 | 0.23365 |
| PSO | 1.71E-05 | 0.00057189 | 0.00011362 | 6.89E-09 | 600 | 0.046053 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 37.6333 | 0.053561 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 22.2667 | 0.033704 | |
| 2 Bukin6 min f=0 | GA | 0.6912 | 11.2453 | 3.7961 | 2.6443 | 600 | 0.013 |
| PSO | 0.0012517 | 0.13 | 0.058051 | 0.041452 | 600 | 0.013559 | |
| WDX-WPOA | 0.0023801 | 0.082569 | 0.029872 | 0.022073 | 600 | 0.80598 | |
| DAF-BRS-CWOA | 0.075576 | 0.50493 | 0.28726 | 0.12965 | 600 | 0.64729 | |
| 3 Drop-Wave min f=-1 | GA | -0.99992 | -0.78573 | -0.93986 | 0.04808 | 600 | 0.012028 |
| PSO | -1 | -0.93625 | -0.98512 | 0.026965 | 218.6333 | 0.004777 | |
| WDX-WPOA | -1 | -1 | -1 | 0 | 14.4333 | 0.018366 | |
| DAF-BRS-CWOA | -1 | -1 | -1 | 0 | 12.1333 | 0.016619 | |
| 4 Eggholder min f=-959.6407 | GA | -959.6387 | -629.6112 | -876.5954 | 78.8508 | 600 | 0.012111 |
| PSO | -959.6407 | -718.1675 | -926.7076 | 53.5701 | 600 | 0.012546 | |
| WDX-WPOA | -959.6407 | -935.338 | -947.2171 | 11.904 | 600 | 1.0656 | |
| DAF-BRS-CWOA | -959.6404 | -935.3379 | -948.744 | 11.7553 | 600 | 0.72768 | |
| 5 Griewank min f=0 | GA | 0.004788 | 0.31789 | 0.075813 | 0.063402 | 600 | 0.013661 |
| PSO | 0 | 0.019719 | 0.0026303 | 0.0045421 | 339.3 | 0.0085504 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 17.5667 | 0.025562 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 13.5 | 0.020979 | |
| 6 Levy min f=0 | GA | 0.00024335 | 1.1263 | 0.12324 | 0.21281 | 600 | 0.038618 |
| PSO | 1.50E-32 | 1.50E-32 | 1.50E-32 | 1.09E-47 | 600 | 0.039204 | |
| WDX-WPOA | 0 | 5.98E-01 | 0.019935 | 0.10735 | 549.9 | 0.84128 | |
| DAF-BRS-CWOA | 0 | 0.39478 | 0.013159 | 0.070865 | 479.1333 | 0.7371 | |
| 7 Levy13 min f=0 | GA | 0.011247 | 2.2797 | 0.22303 | 0.76184 | 600 | 0.01238 |
| PSO | 0.00010961 | -0.97283 | -0.97283 | 3.33E-16 | 600 | 0.012789 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 25.1333 | 0.038007 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 21.7 | 0.03573 | |
| 8 Rastrigin min f=0 | GA | 0.013678 | 6.3489 | 2.2711 | 1.7587 | 600 | 0.0119 |
| PSO | 0 | 0.99496 | 0.066331 | 0.24819 | 110.4333 | 0.0023772 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 12.3 | 0.018345 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 10.9 | 0.016472 | |
| 9 Schaffer2 min f=0 | GA | 1.03E-06 | 0.042464 | 0.010477 | 0.0093243 | 600 | 0.01321 |
| PSO | 0 | 0 | 0 | 0 | 66.9667 | 0.0019346 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 11.7333 | 0.016255 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 9.7 | 0.01489 | |
| 10 Bohachevsky1 min f=0 | GA | 0.011268 | 0.91934 | 0.48134 | 0.25563 | 600 | 0.011984 |
| PSO | 0 | 0 | 0 | 0 | 78.1667 | 0.0017231 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 14.5 | 0.020572 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 12.3 | 0.018081 | |
| 11 Perm0-d-β min f=0 | GA | 0.011057 | 388.7314 | 26.2837 | 71.8592 | 600 | 0.01213 |
| PSO | 0 | 0 | 0 | 0 | 175.3667 | 0.0052171 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 25.8 | 0.030897 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 21.7667 | 0.026103 | |
| 12 Rotated Hyper-Ellipsoi min f=0 | GA | 0.00039244 | 0.12985 | 0.034819 | 0.03493 | 600 | 0.012687 |
| PSO | 1.96E-134 | 1.02E-129 | 8.56E-131 | 2.28E-130 | 600 | 0.013828 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 25.9667 | 0.029679 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 22.7 | 0.027767 | |
| 13 Sum Squares min f=0 | GA | 2.42E-06 | 0.0025094 | 0.00051005 | 0.00048937 | 600 | 0.012084 |
| PSO | 5.91E-137 | 2.18E-132 | 3.76E-133 | 5.82E-133 | 600 | 0.013233 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 24.3667 | 0.029123 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 21.1667 | 0.027215 | |
| 14 Trid min f=-2 | GA | -0.037736 | -1.9991 | -1.8925 | 0.11219 | 600 | 0.01241 |
| PSO | -2 | -2 | -2 | 0 | 600 | 0.014356 | |
| WDX-WPOA | -2 | -2 | -2 | 0 | 10.6667 | 0.013702 | |
| DAF-BRS-CWOA | -2 | -2 | -2 | 0 | 9.1667 | 0.011635 | |
| 15 Booth min f=0 | GA | 4.93E-12 | 4.92E-09 | 8.73E-10 | 1.11E-18 | 74.79 | 0.088336 |
| PSO | 5.62E-23 | 8.78E-17 | 5.13E-18 | 2.36E-34 | 600 | 0.02997 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 24.0667 | 0.027151 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 20.4 | 0.025748 | |
| 16 Matyas min f=0 | GA | 9.11E-06 | 0.042161 | 0.010059 | 0.010711 | 600 | 0.01241 |
| PSO | 1.76E-120 | 2.71E-116 | 2.87E-117 | 5.48E-117 | 600 | 0.013081 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 24.5 | 0.030189 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 20.3333 | 0.025239 | |
| 17 Zakharov min f=0 | GA | 2.32E-06 | 0.0016735 | 0.00069625 | 0.00057972 | 600 | 0.015955 |
| PSO | 3.10E-137 | 7.27E-131 | 3.57E-132 | 1.30E-131 | 600 | 0.016975 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 24.8 | 0.053188 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 21.1 | 0.045726 | |
| 18 Easom min f=-1 | GA | -1 | 0 | -0.75001 | 0.18749 | 72.91 | 0.084762 |
| PSO | -1 | -6.30E-61 | -0.90001 | 0.089988 | 593.02 | 0.033852 | |
| WDX-WPOA | -1 | -1 | -1 | 0 | 13.6667 | 0.018649 | |
| DAF-BRS-CWOA | -1 | -1 | -1 | 0 | 11.7333 | 0.016503 | |
| 19 Eggcrate min f=0 | GA | 2.01E-02 | 6.72E-01 | 2.91E-01 | 1.61E-01 | 600 | 0.024449 |
| PSO | 6.23E-24 | 1.42E-08 | 1.42E-10 | 1.99E-18 | 597.56 | 0.030566 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 14.9667 | 0.020518 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 12.9 | 0.018693 | |
| 20 Bohachevsky3 min f=0 | GA | 0.032611 | 0.7588 | 0.26482 | 0.18579 | 600 | 0.024356 |
| PSO | 0 | 0 | 0 | 0 | 87.4667 | 0.016874 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 14.2333 | 0.023575 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 11.9 | 0.017347 | |
| 21 3P-Function | GA | 15442.6497 | 24126.8603 | 19416.3543 | 1816.0666 | 600 | 0.79052 |
| PSO | 9629.7786 | 13812.6688 | 11390.4309 | 844.0894 | 600 | 5.0392 | |
| WDX-WPOA | 8586.7186 | 11586.8103 | 10318.2428 | 762.6918 | 600 | 79.7046 | |
| DAF-BRS-CWOA | 8586.7186 | 11387.3388 | 9997.6471 | 710.5523 | 600 | 73.1483 |
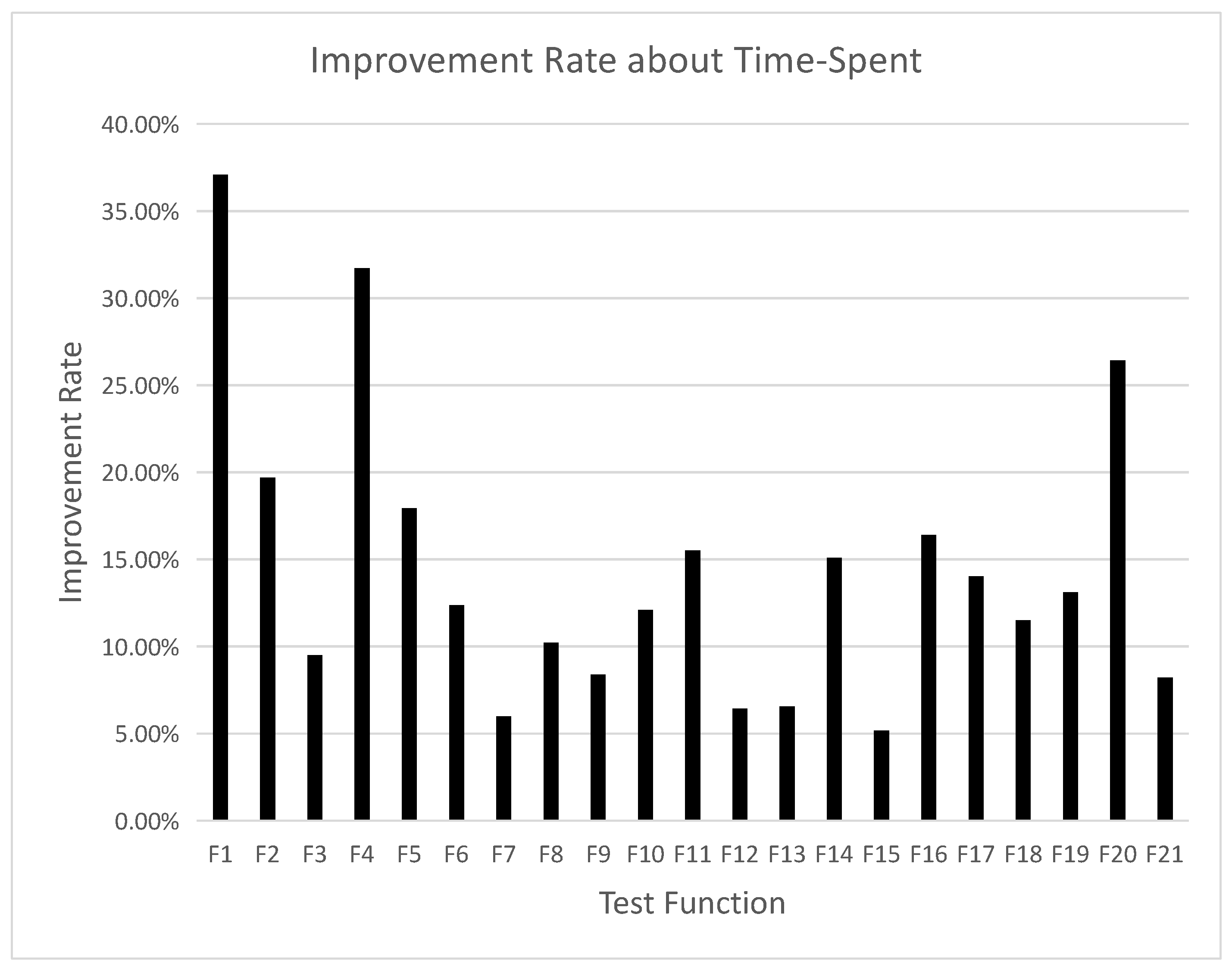
| Function | WDX-WPOA | DAF-BRS-CWOA | Improvement-Rate | |
| Algorithm | ||||
| F1 | 0.053561 | 0.033704 | 37.07% | |
| F2 | 0.80598 | 0.64729 | 19.69% | |
| F3 | 0.018366 | 0.016619 | 9.51% | |
| F4 | 1.0656 | 0.72768 | 31.71% | |
| F5 | 0.025562 | 0.020979 | 17.93% | |
| F6 | 0.84128 | 0.7371 | 12.38% | |
| F7 | 0.038007 | 0.03573 | 5.99% | |
| F8 | 0.018345 | 0.016472 | 10.21% | |
| F9 | 0.016255 | 0.01489 | 8.40% | |
| F10 | 0.020572 | 0.018081 | 12.11% | |
| F11 | 0.030897 | 0.026103 | 15.52% | |
| F12 | 0.029679 | 0.027767 | 6.44% | |
| F13 | 0.029123 | 0.027215 | 6.55% | |
| F14 | 0.013702 | 0.011635 | 15.09% | |
| F15 | 0.027151 | 0.025748 | 5.17% | |
| F16 | 0.030189 | 0.025239 | 16.40% | |
| F17 | 0.053188 | 0.045726 | 14.03% | |
| F18 | 0.018649 | 0.016503 | 11.51% | |
| F19 | 0.032477 | 0.028214 | 13.13% | |
| F20 | 0.023575 | 0.017347 | 26.42% | |
| F21 | 79.7046 | 73.1483 | 8.23% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



