Submitted:
22 October 2024
Posted:
30 October 2024
You are already at the latest version
Abstract
This paper presents a Poisson multi-Bernoulli mixture (PMBM) forward-backward smoother for multiple extended target detection and tracking in the random finite sets (RFS) framework. The proposed method consists of forward filtering, achieved by the PMBM filter recursion, followed by backward smoothing, achieved by a parametric updated posterior PMBM density. The performance of the proposed method is evaluated in a simulation study.
Keywords:
Poisson multi-Bernoulli mixture
; forward-backward
; smoother
; random finite sets
; extended target tracking
0. Introduction
The PMBM is a parameterised Bayesian recursive filtering in the RFS framework [1,2]. This paper presents a forward-backward smoothing method for extended target tracking (ETT) using PMBM representations. General RFS filters consist of prediction, achieved using the Chapman-Kolmogorov equation [3], and filtering, achieved using the Bayesian formula. This paper considers the problem of smoothing based on PMBM filtering in ETT. Prediction, filtering and smoothing are three key interrelated steps of a dynamic system for joint target detection and tracking conditioned on noisy sensor measurements [4]. Smoothing typically refers to the estimation of the target state of the past time using all measurements up to the current time. In other words, it amounts to calculating , the probability density of the state at time k, given the observation history up to time l. Prediction, filtering and smoothing refer respectively to the cases , and [5].
The forward-backward probability hypotheses density (PHD) smoothers are proposed in [6,7,8], but the PHD filter is known to suffer from highly uncertain cardinality estimates because it models the target state as a Poisson RFS. The Bernoulli smoother is first introduced in [9], which models the target in one of two modes "present" or "absent" by a Bernoulli RFS in a non-linear model, but is limited to the case where only one target can be tracked. However, the multi-Bernoulli (MB) filter can accommodate the case with targets of varying [10]. The PMBM is a multi-target tracking (MTT) Bayesian conjugate prior, which means that we know what the theoretically exact density is and can find computationally tractable approximations for the given assumed models. In addition, the PMBM conjugate prior has a more efficient hypotheses structure than the PHD and MB filters. In fact, PMBM can be converted to PHD and MB, respectively. If we recycle all Bernoulli components and approximate them as the intensity of the Poisson point process (PPP) after each update in PMBM filtering, we obtain a PHD filter [11]. If the PMBM birth model is multi-Bernoulli instead of Poisson, the PMBM filter reduces to a multi-Bernoulli mixture (MBM) filter [12]. If there is only one Bernoulli component in the MBM, then the MBM is actually an MB. Therefore, a feasible forward-backward smoother is given by an implementation of PMBM filtering in this paper.
1. Problem Formulation
1.1. The Generic Multi-Target Bayesian Forward–Backward Smoother
The extended target states and the measurements are both modelled as RFS. At each time step k, let denote a single extended target state, each target state x is also a random variable. The set of measurements taken at time step k is denoted as , including clutter and target generated measurements. z is the single extended target measurement. The number of targets, i.e. the target set cardinality , is a time-varying discrete random variable. Y is the smoothed extended target state set.
Let , and denote the multi-target set density, the multi-target transition density and the multi-target measurement likelihood, respectively. The Bayesian multi-target filter propagates the multi-target posterior density in time using the Chapman-Kolmogorov prediction equation.
and the Bayesian update formula
The generic multi-target Bayesian forward–backward smoother (smoothing recursion) is described as follows
For simplicity the following notation is adopted throughout this paper:
1.2. Standard Multi-Target System Models
1.2.1. Multi-Target Dynamic Model
As described in Sec.II A, for the extended target set at time step k, each target survives with probability and moves to a new state with a transition density according to a Markov chain, or dies with probability . The multi-target set are the union of the surviving targets and new targets, which are born independently following a Poisson point process (PPP) with intensity .
1.2.2. Extended Target Measurement Model
Let be the measurement set, where are mutually independent disjoint sets. modelled as a PPP with intensity is the clutter measurement set. is the measurement generated by the target . Each extended target state is either detected with probability or missed with probability . The extended target measurements are modelled as a PPP rate and spatial distribution , independent of any other targets and their corresponding generated measurements.
We use the convolution formula for the multiple extended target likelihood density, also known as the conditional extended target measurement set likelihood,
For an extended target , the effective detection probability is the product of the detection probability and the PPP probability density function (PDF), i.e., where is the Poisson probability of generating at least one measurement. Therefore, the effective probability that the extended target will not be detected is
Note that the conditional likelihood (4) for an empty measurement set, , is also described by (5) [13].
1.3. PMBM RFS
The PMBM filter developed in recent years is an RFS method defined as a convolution of a PPP intensity for the undetected targets and a MBM density for the detected targets. The PMBM filter is an ETT conjugate prior based on the standard RFS method [10]. The importance of the conjugate prior is that, given the assumed models, we know what the theoretically exact density is and can find computationally tractable approximations [14].
In the PMBM model, the set of targets is a union of two disjoint sets, i.e. . The set of undetected targets is denoted , modelled by PPP. The set of detected targets, denoted , modelled by MBM. The density of the PMBM set can be described by [13]
Therefore, the RFS density of PMBM is entirely determined by the parameters .
2. The PMBM Forward-Backward Smoother
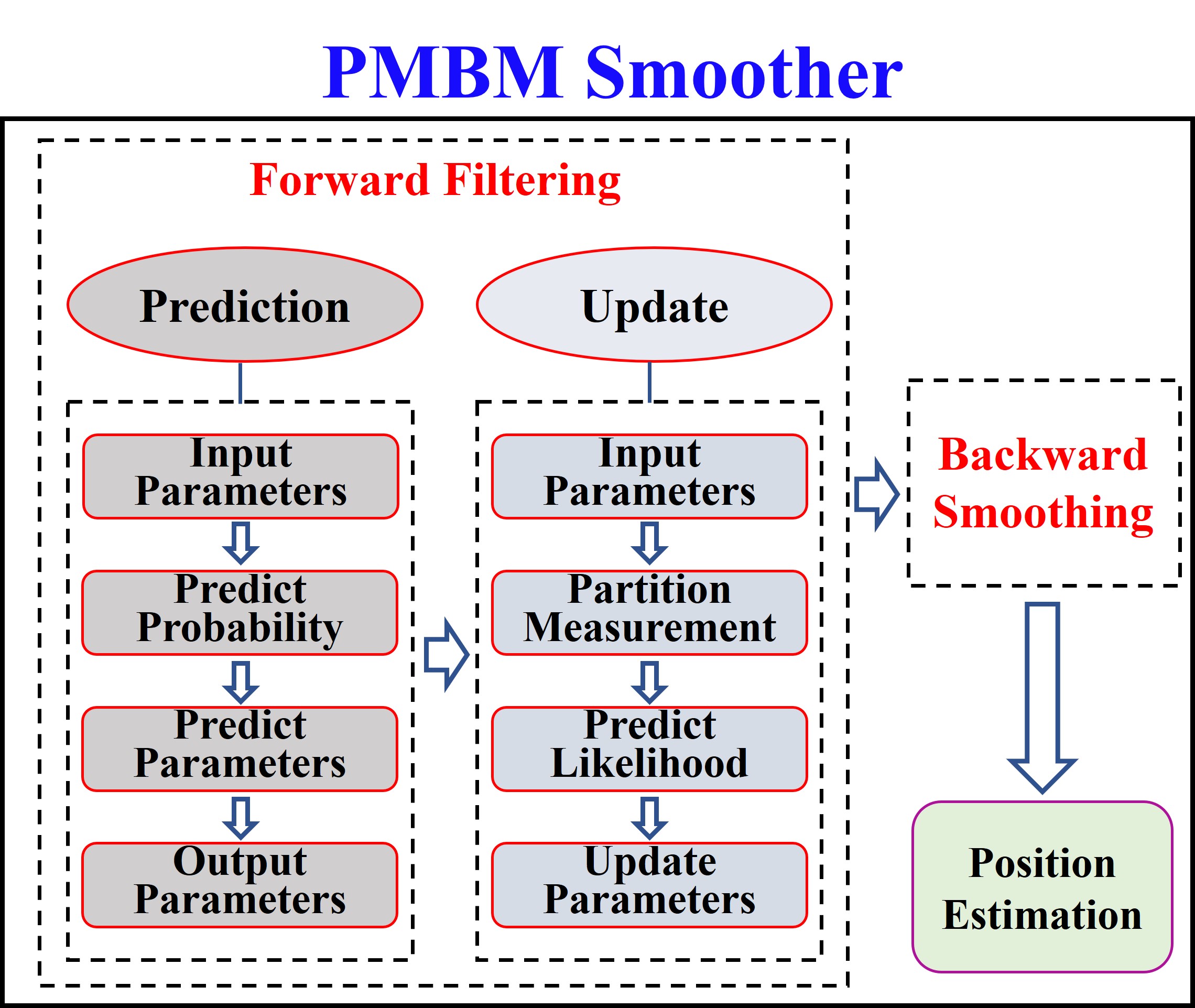
The proposed PMBM forward-backward smoother consists of forward filtering achieved by the PMBM filter recursion, followed by backward smoothing achieved by a parametric updated posterior PMBM density. In this section, we give a representation of the backward smoothing recursion.
2.1. PMBM Forward Filtering
The forward filtering is done by the PMBM filtering recursion. Here the PMBM filtering recursion is omitted, for a more detailed description see [10].
2.2. Backward Smoothing Recursion
After the PMBM filter recursion, the updated PMBM filter density at time k is
where
where is the space of all data association hypotheses. C is a subset of all data associations A. A data association is an assignment of each measurement in to a source, either the background (clutter or new target) or one of the existing targets indexed by . is the probability of missed detection. is the likelihood function of the data association C. is a Bernoulli density. See [10] for more details.
Given the above updated posterior PMBM density, a set of measurements and standard multi-target system models, then the PMBM backward smoothing density can be calculated as follows.
The detailed implementation of the PMBM smoother is shown in Figure 1.
The Poisson and MBM parts of the backward smoothing are calculated as follows.
2.2.1. PPP
2.2.2. MBM
The Bernoulli part of the backward smoothing can be computed using the Bernoulli filter smoothing recursion [9], which is given by
The formula above (16) can be rewritten as
for detailed proof, see [9].
As there are several Bernoulli components in PMBM filtering, we have used
where , . is the index set of the Bernoulli components. is the index set of the MBs. The calculation of (18) is the same as that of (17). See [9] for more details. The MBM is composed of several MBs, the smoothing recursion is given by
where from (18). Next we look at the calculation of .
Since the number of data associations is unknown, the number of components in the MBM increases rapidly as more data are observed. Each MB component in the MBM corresponds to a unique global hypotheses. The number of MBs and Bernoulli components is retained in the PMBM prediction. However, due to unknown data association, these two numbers grow in the update, where the more global hypotheses, the more data association weights need to be computed, which may refer to (17a) in [10]. In the PMBM smoothing recursion, we also need to compute weights from four parts according to the data association formed during the filtering process.
For missed detection of PPP
In this part, no data associations have been generated in relation to missed PPP detection or updating the undetected target intensity. Therefore, there is no need to calculate the weight.
For potential targets detected of PPP for the first time
As the MBM filter density is updated in this part, we give expressions for an updated weight for the first measurement cell in the data associations.
where , , is the likelihood of the first measurement cell, is the first measurement cell corresponding to the data association. is the assignment of measurement cell in Z to new Bernoulli components.
For missed detection of MBM
In this part, we consider the update of the missed detection of the MBM filtering recursion for the second measurement cell in the data associations, so the updated weight is as follows
where is the likelihood of the second measurement cell, is the second measurement cell corresponding to the data association. is the hypotheses of the unassigned measurement cell in Z.
For updated MBM
In this part, we consider the updating of the previous potentially detected targets of the MBM filtering recursion for the third measurement cell in the data associations, so that the updated weight is as follows.
where is the likelihood of the third measurement cell, is the third measurement cell corresponding to the data association. is the assignment of measurement cell in Z to the existing Bernoulli components.
3. Simulation Results
In this section, we evaluate the performance of the proposed algorithm in a scenario over a surveillance area with coalescence, where there are three targets moving randomly and irregularly at a constant speed. The maximum number of global hypotheses considered is . At each update step, we use ellipsoidal gating with threshold to consider only the relevant measurements for each individual trajectory hypotheses. In the simulation experiment presented here, we focus on comparing the PMBM smoother with the standard PMBM filter. For each filter, 100 Monte Carlo (MC) runs were performed. The Poisson clutter intensity is and the target detection probability is , the target survival probability is .
Let be the kinematic state, where is the position of the extended target, is the velocity. , where H is the observation matrix and R is the measurement noise covariance matrix, given by respectively
where is the standard deviation of the measurement noise. The Generalised Optimal Sub-pattern Assignment (GOSPA) metric [15] is used to assess performance. The cut-off and order parameters are set to and respectively
It can be seen from Figure 2 that the PMBM smoother performs much better and more stable compared to the PMBM filter because more measurements are used to produce more effective estimates by delaying the decision time (k) and using data at a later time . The decomposition of the GOSPA errors of the PMBM smoother and the PMBM filter are shown in Figure 3, while the mean computation time per MC is shown in Table 1. It can be seen that the PMBM smoother has the better performance according to the GOSPA errors and stable trajectory estimation. However, the PMBM smoother is generally a more computationally expensive operation, as the mean computation time of the PMBM smoother is slower than that of the PMBM filter, because the PMBM smoother has to perform the third step "smoothing" after "prediction" and "filtering", while the PMBM filter does not. In other words, the PMBM smoother must be computed in reverse order from to 0 with the following PMBM recursive density after "updating" with measurements at a current time k.
4. Conclusion
In this paper, we have presented a PMBM smoother under the RFS framework, which has the advantage of maintaining the tracking accuracy of different positions. The proposed smoother consists of forward propagation of PMBM filter densities followed by backward propagation of an updated PMBM filter density including PPP smoothing and MBM smoothing, respectively. Simulation results have demonstrated the superior performance of the smoother in terms of GOSPA errors and tracking performance compared to the standard PMBM filter.
Author Contributions
Conceptualization, Xingxiang Xie; Methodology, Xingxiang Xie; Software, Xingxiang Xie and Kai Tian; Validation, Zhumei Song and Kening Li; Formal analysis, Xingxiang Xie; Investigation, Kai Tian; Resources, Zhumei Song and Kening Li; Data curation, Xingxiang Xie; Writing—original draft preparation, Xingxiang Xie; Writing—review and editing, Xingxiang Xie; Visualization, Xingxiang Xie; Supervision, Kai Tian, Zhumei Song and Kening Li; Project administration, Kening Li; Funding acquisition, Xingxiang Xie.
Funding
This work was supported by the Doctoral and Master’s Teacher Research Initiation Project (Science and Technology)—Doctoral Level under Grant SZIIT2024KJ010.
Data Availability Statement
Due to privacy concerns and ethical restrictions, the data underlying the findings of this paper are not publicly available.
Acknowledgments
We would like to express our gratitude to Ángel F. García-Fernández for his invaluable technical support throughout the research process. Additionally, we acknowledge the administrative assistance provided by the School of Information Communication Technology, Shenzhen Institute of Information Technology.
Conflicts of Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Abbreviations
The following abbreviations are used in this manuscript:
| ETT | extended target tracking |
| GOSPA | Generalised Optimal Sub-pattern Assignment |
| MB | multi-Bernoulli |
| MBM | multi-Bernoulli mixture |
| MC | Monte Carlo |
| MTT | multi-target tracking |
| PHD | probability hypothesis density |
| PMBM | Poisson multi-Bernoulli mixture |
| PPP | Poisson point process |
| RFS | random finite sets |
References
- Williams, J.L. Marginal multi-Bernoulli filters: RFS derivation of MHT, JIPDA, and association-based MeMBer. IEEE Transactions on Aerospace and Electronic Systems 2015, 51, 1664–1687. [Google Scholar] [CrossRef]
- García-Fernández, Á.F.; Williams, J.L.; Granström, K.; Svensson, L. Poisson multi-Bernoulli mixture filter: Direct derivation and implementation. IEEE Transactions on Aerospace and Electronic Systems 2018, 54, 1883–1901. [Google Scholar] [CrossRef]
- Karr, A.F. Markov Chains: Theory and Applications (Dean L. Isaacson and Richard W. Madsen). SIAM Review 1978, 20, 606. [Google Scholar] [CrossRef]
- Vo, B.N.; Vo, B.T.; Mahler, R.P. Closed-form solutions to forward–backward smoothing. IEEE Transactions on Signal Processing 2011, 60, 2–17. [Google Scholar] [CrossRef]
- Harvey, A.C. Forecasting, structural time series models and the Kalman filter 1990.
- Nadarajah, N.; Kirubarajan, T.; Lang, T.; McDonald, M.; Punithakumar, K. Multitarget tracking using probability hypothesis density smoothing. IEEE Transactions on Aerospace and Electronic Systems 2011, 47, 2344–2360. [Google Scholar] [CrossRef]
- Mahler, R.P.; Vo, B.T.; Vo, B.N. Forward-backward probability hypothesis density smoothing. IEEE Transactions on Aerospace and Electronic Systems 2012, 48, 707–728. [Google Scholar] [CrossRef]
- Vo, B.N.; Vo, B.T.; Mahler, R.P. A closed form solution to the probability hypothesis density smoother. 2010 13th International Conference on Information Fusion (FUSION). IEEE, 2010, pp. 1–8.
- Vo, B.T.; Clark, D.; Vo, B.N.; Ristic, B. Bernoulli forward-backward smoothing for joint target detection and tracking. IEEE Transactions on Signal Processing 2011, 59, 4473–4477. [Google Scholar] [CrossRef]
- Granström, K.; Fatemi, M.; Svensson, L. Poisson multi-Bernoulli mixture conjugate prior for multiple extended target filtering. IEEE Transactions on Aerospace and Electronic Systems 2019, 56, 208–225. [Google Scholar] [CrossRef]
- Williams, J.L. Hybrid Poisson and multi-Bernoulli filters. 2012 15th International Conference on Information Fusion (FUSION). IEEE, 2012, pp. 1103–1110.
- García-Fernández, Á.F.; Svensson, L.; Williams, J.L.; Xia, Y.; Granström, K. Trajectory Poisson multi-Bernoulli filters. IEEE Transactions on Signal Processing 2020, 68, 4933–4945. [Google Scholar] [CrossRef]
- Xia, Y.; Granström, K.; Svensson, L.; Fatemi, M.; García-Fernández, Á.F.; Williams, J.L. Poisson Multi-Bernoulli Approximations for Multiple Extended Object Filtering. IEEE Transactions on Aerospace and Electronic Systems 2022, 58, 890–906. [Google Scholar] [CrossRef]
- Xie, X.; Wang, Y. Analysis of recycling performance in Poisson multi-Bernoulli mixture filters. 2021 IEEE 24th International Conference on Information Fusion (FUSION). IEEE, 2021, pp. 1–7.
- Rahmathullah, A.S.; García-Fernández, Á.F.; Svensson, L. Generalized optimal sub-pattern assignment metric. 2017 20th International Conference on Information Fusion (FUSION). IEEE, 2017, pp. 1–8. [CrossRef]
Figure 1.
The recursion of the PMBM forward-backward smoother
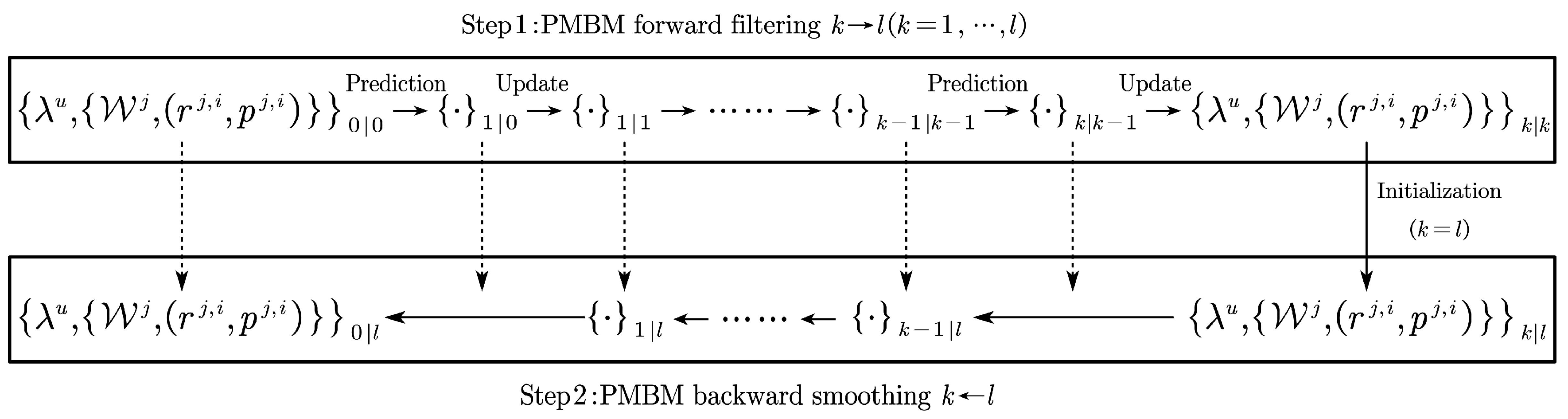
Figure 2.
(a) It is shown that the ground truth trajectories of three targets are coloured differently and their initial positions are marked with a circle and their final positions with a triangle. Furthermore, targets 1 and 2 were born at time 1 and died at time 70. Target 3 was born at time 20 and died at time 100. (b) The generated measurement data (black crosses) are shown in per MC. (c) Estimated trajectories from the PMBM filter. (d) Estimated trajectories from the PMBM smoother.
Figure 2.
(a) It is shown that the ground truth trajectories of three targets are coloured differently and their initial positions are marked with a circle and their final positions with a triangle. Furthermore, targets 1 and 2 were born at time 1 and died at time 70. Target 3 was born at time 20 and died at time 100. (b) The generated measurement data (black crosses) are shown in per MC. (c) Estimated trajectories from the PMBM filter. (d) Estimated trajectories from the PMBM smoother.
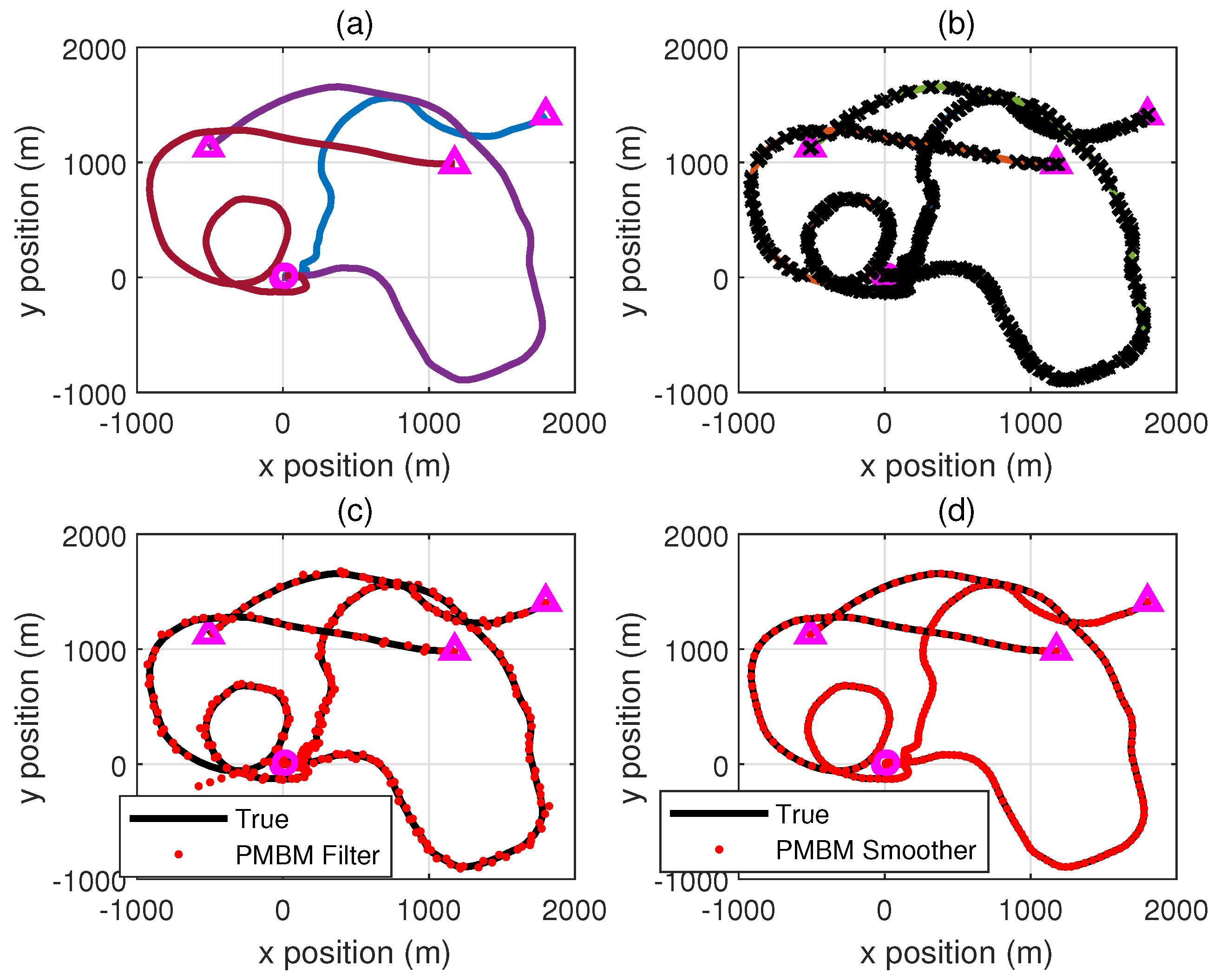
Figure 3.
Decomposition of GOSPA errors of PMBM Smoother and PMBM Filter. (a) is total error, (b) is localization error, (c) is missed error, (d) is false error.
Figure 3.
Decomposition of GOSPA errors of PMBM Smoother and PMBM Filter. (a) is total error, (b) is localization error, (c) is missed error, (d) is false error.
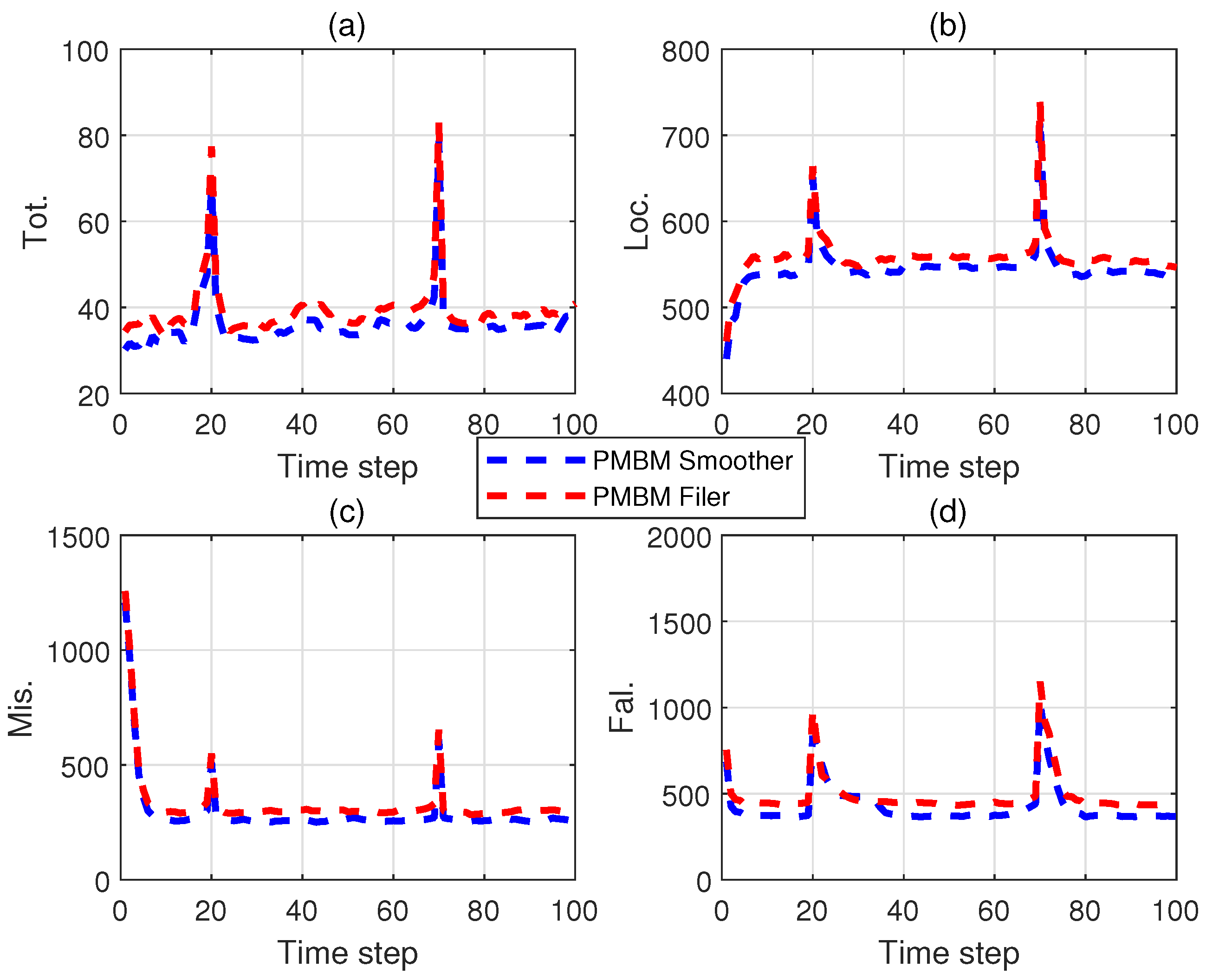

Table 1.
Mean GOSPA Errors and Computational Time (s) of PMBM Smoother and PMBM Filter.
| Tot. | Loc. | Mis. | Fal. | Time (s) | |
| PMBM Smoother |
35.9148 | 544.7799 | 291.3828 | 424.2022 | 7.5621 |
| PMBM Filter | 39.1842 | 558.4260 | 328.7539 | 485.2292 | 6.1128 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



