Submitted:
23 September 2024
Posted:
24 September 2024
You are already at the latest version
Abstract
The increasing demand for agricultural automation within the precision agriculture sector necessitates the development of advanced robotic systems to enhance efficiency in fruit harvesting. This study presents the Computer-Aided Design (CAD) and modeling of a 4-degree-of-freedom (DOF) robotic arm specifically designed for automated fruit harvesting applications. Utilizing Fusion 360 software, a comprehensive model has been created, encompassing material selection, stress analysis, and motion simulations to verify both the functionality and durability of the robotic system. Design methodologies are articulated, alongside simulation tests that evaluate the arm’s operational performance. Proposed enhancements aim to optimize harvesting efficiency while minimizing potential damage to crops. The robotic arm is equipped with an adaptive gripper, engineered to adjust to various fruit sizes, ensuring delicate and precise manipulation during the harvesting process. This work establishes a robust foundation for the advancement of robotic systems in agricultural contexts, contributing to improved productivity and sustainability in fruit harvesting operations.
Keywords:
Robotic arm
; Motion simulation
; CAD design
1. Introduction
Agriculture faces multiple challenges related to sustainability, increasing productivity, and reducing intensive manual labor. One of the most critical issues is fruit harvesting, which, in many regions of the world, remains a manual process, thereby increasing production costs and generating inefficiencies [6]. In response to these challenges, robotic process automation has emerged as a promising solution to enhance efficiency in the agricultural sector [2]. Among the most relevant advancements are robotic arms, which can perform harvesting tasks accurately and quickly. These systems not only reduce dependence on human labor but also improve the quality of the harvest and minimize product waste [1].
The present work aims at the design and CAD modeling of a 4-degree-of-freedom robotic arm oriented toward fruit harvesting. Although the construction and testing of robotic prototypes for agriculture have been extensively researched [8], this article is limited to the design and simulation phase of the model in a virtual environment using Fusion 360 software. The physical construction of the device has not been conducted; thus, the results presented are based solely on simulations and stress analysis.
In the last decade, various robotic systems have been developed for agriculture. Examples such as the robotic harvesting arm developed by [4] and the automated system for apple harvesting by the team of [8] demonstrate significant advances, yet they also present limitations in terms of adaptability and efficiency in uneven terrain. This article addresses some of these challenges by offering a streamlined, modular design that can be adjusted to different crop configurations.
The development of robotic arms for automated harvesting presents several design challenges, including adaptability to different types of fruit and the ability to operate in unstructured environments. Additionally, the design of grippers capable of handling fruit without causing damage is a key aspect of the system’s functionality [10]. In this context, CAD modeling plays a crucial role, as it allows for the anticipation of the mechanical behavior of the robotic arm prior to physical construction. Through simulations, it is possible to analyze aspects such as movement trajectories, the forces involved, and the interactions between the arm and the objects to be manipulated [11].
This article describes the design process in detail, focusing on the modeling of the joints, links, and adaptive gripper of the robotic arm. The design has been developed in a modular manner to allow for future improvements and adjustments without necessitating modifications to the entire structure. A 4-degree-of-freedom configuration was chosen due to its simplicity and efficiency in executing basic harvesting movements [5]. This number of degrees of freedom provides a balance between control complexity and the ability to reach fruits from various angles.
Throughout the modeling process, stress simulations were conducted to ensure that the arm can withstand the expected loads during harvesting, thereby minimizing the risk of mechanical failure [7]. These simulations were based on conditions typical of an agricultural environment, where the robotic arm must operate on uneven terrain and handle fruits of varying sizes and weights.
Previous research, such as that conducted by [8], has demonstrated that robotic systems can significantly reduce harvesting time compared to traditional methods. However, many of these systems require enhancements in adaptability and the ability to function under varying agricultural conditions. The design presented here aims to overcome some of these limitations through a flexible and modular approach, allowing for customization for different types of crops without the need to modify the entire system.
In summary, this article provides a solid foundation for the development of robotic arms intended for automated fruit picking. The CAD design and modeling presented not only facilitate the visualization of the proposed system but also offer valuable insights into its potential performance through motion simulations and structural analysis. It is important to note that this work is limited to the design and simulation phase; the physical construction of the prototype will be addressed in future research.
2. Methodology
2.1. Design of the Robotic Arm in CAD
The design of the robotic arm has been developed with a focus on a modular and adaptive structure, employing an approach that integrates various materials and manufacturing techniques to optimize performance while minimizing costs. The CAD model of the robotic arm was created using Fusion 360, ensuring precision and flexibility in the design process. This model has been specifically conceived for manufacturing primarily through 3D printing, which facilitates construction in low-budget environments. The use of 3D printing not only enables rapid prototyping and iteration but also allows for quick adjustments to the design based on testing feedback. This adaptability is crucial in agricultural applications, where conditions can vary significantly. Furthermore, the modular design allows individual components to be easily replaced or upgraded, enhancing the longevity and functionality of the robotic arm over time. By strategically selecting materials that balance strength, weight, and cost, the design aims to ensure that the robotic arm can withstand the demands of fruit harvesting while remaining economically viable for widespread use in the agricultural sector.
2.2. Structure of the Robotic Arm
A 4-DOF robotic arm typically consists of the following joints:
- Base rotation (J1).
- Arm Raise (J2).
- Arm extension (J3).
- Wrist rotation (J4).
Figure 1.
Figure 1 shows the basic structure for the robotic arm with 4 degrees of freedom.
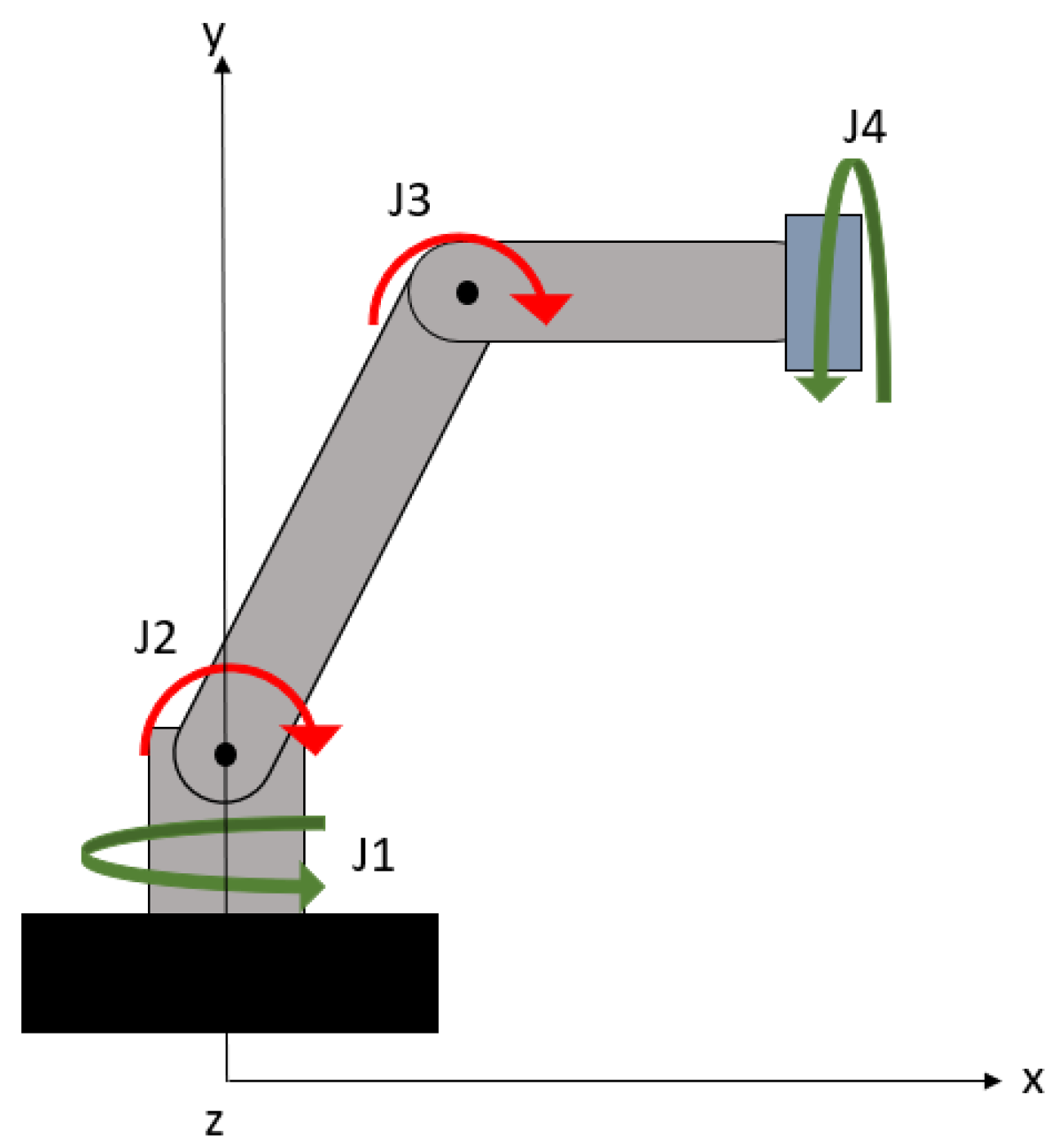
Each joint of the robotic arm is equipped with an electric motor that delivers the precise movements required for effective operation. The coordination of these motors allows the arm to reach and manipulate fruit positioned at various angles within its operational range, enhancing its versatility in the field.
The robotic arm features an internal structure made of aluminum, chosen for its exceptional mechanical properties, including lightweight design and high tensile strength, which ensure that the arm can withstand the forces generated during the harvesting process without compromising mobility [3]. Aluminum’s lightweight nature contributes to the overall efficiency of the arm, reducing energy consumption and allowing for smoother operation. Additionally, aluminum serves as an excellent thermal conductor, facilitating the dissipation of heat generated by the motors, which is crucial for maintaining performance during prolonged use. Its natural corrosion resistance further enhances its suitability for outdoor applications, where exposure to moisture and environmental elements is common. This combination of properties makes aluminum an ideal choice for constructing a robust and reliable robotic arm designed for agricultural tasks, ultimately contributing to improved productivity in fruit harvesting.
Figure 2.
Figure 2 shows the internal structure of the robotic arm, which is composed of a square aluminum profile.
Figure 2.
Figure 2 shows the internal structure of the robotic arm, which is composed of a square aluminum profile.
On the other hand, the external structure of the arm is designed using PETG plastic (glycol-modified polyethylene terephthalate), a material widely favored in 3D printing due to its ease of processing, excellent mechanical strength, and impressive durability. PETG was selected over other commonly used materials, such as PLA (polylactic acid) or ABS (acrylonitrile butadiene styrene), primarily because of its superior flexibility and impact resistance. These properties are crucial for withstanding the vibrations and shocks that are often encountered in agricultural environments, where the robotic arm may need to navigate uneven terrain and endure sudden movements during harvesting operations.
Moreover, PETG offers significant advantages in terms of environmental resilience. It is resistant to moisture and chemical agents, making it a more suitable choice than other plastics for outdoor applications where exposure to water, fertilizers, and pesticides is common. This resistance helps maintain the integrity of the material over time, ensuring that the robotic arm can operate effectively without degrading. Additionally, the use of PETG allows for a lightweight yet robust structure, contributing to the overall efficiency of the robotic arm. By leveraging the unique properties of PETG, the design not only enhances the arm’s functionality but also extends its lifespan, making it a reliable solution for the demands of modern agricultural practices.
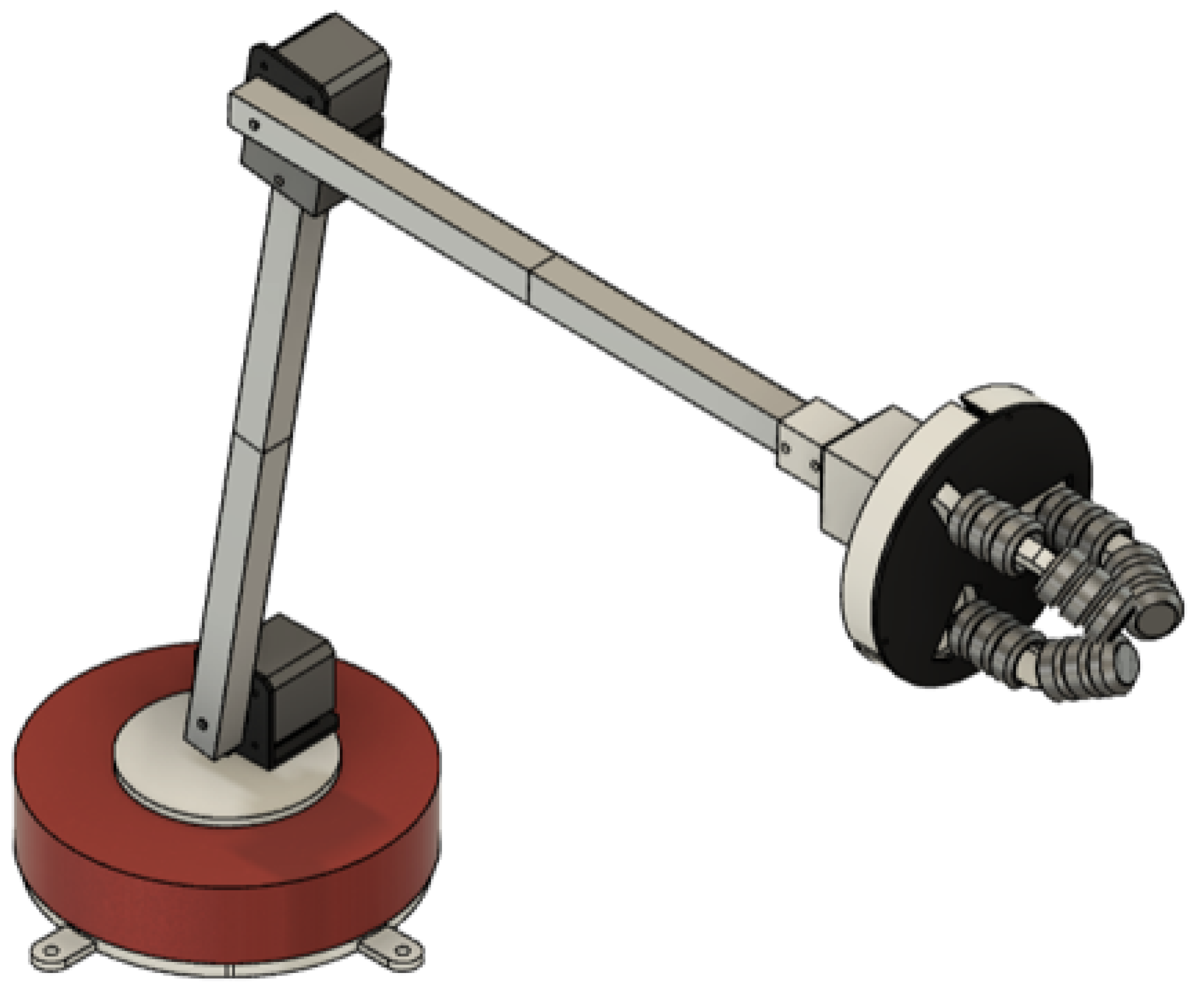
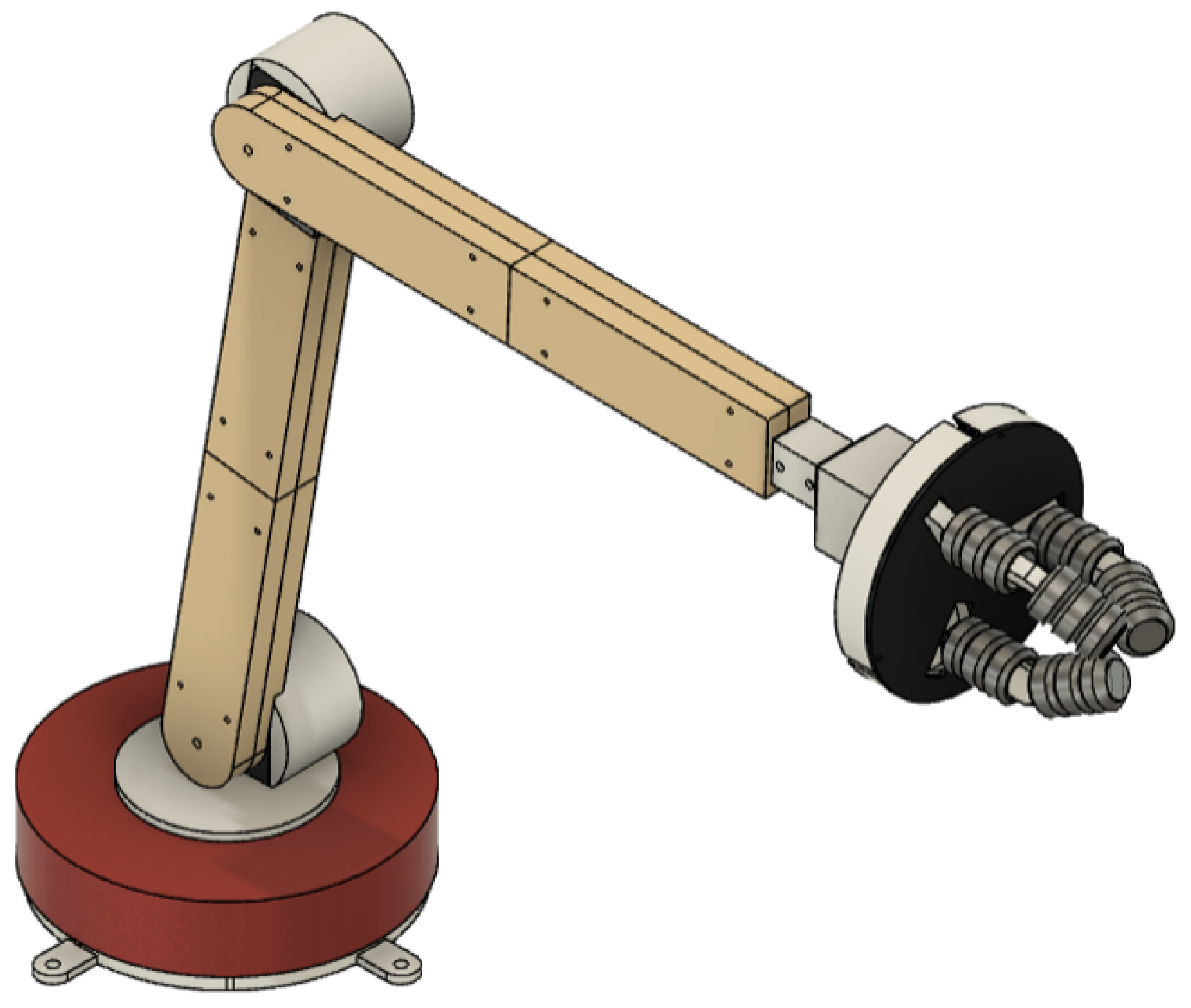
Figure 3.
Figure 3 shows the complete robotic arm with its plastic housing.
2.3. Gripper Design
The gripper of the robotic arm has been designed with three points and is also manufactured using 3D printing, employing two different materials to optimize both the precision of the grip and the protection of the fruit. The structural components of the gripper are made of PETG, leveraging its advantages, such as durability and resistance. In contrast, the gripper tips are printed with TPU (thermoplastic polyurethane), an elastic and flexible material that allows for a firm yet gentle grip, minimizing the risk of damaging the fruits during harvesting [11]. The use of TPU in the gripper tips is crucial to ensure that the system can handle fruits of varying sizes and textures without causing any surface damage.
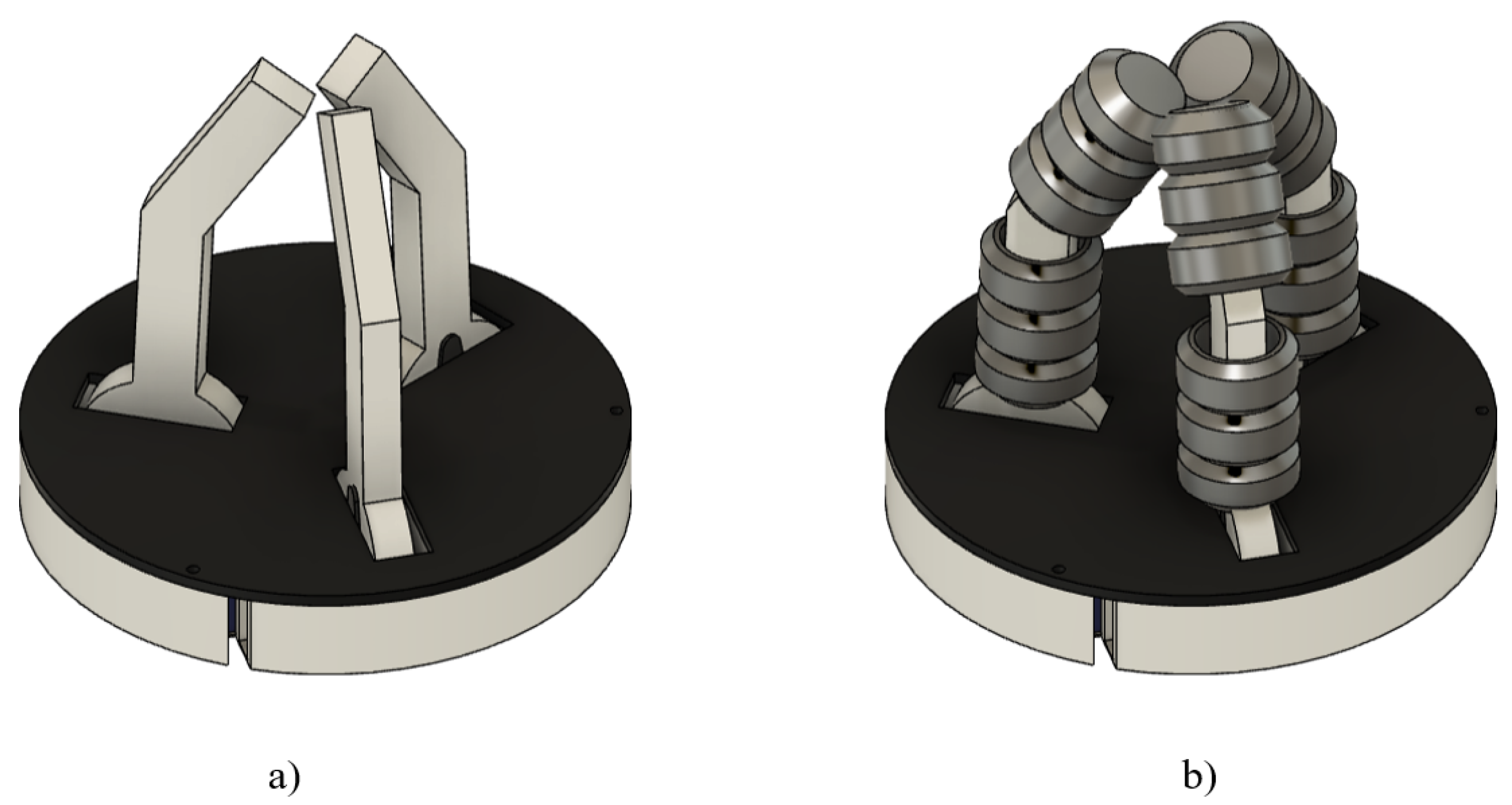
Figure 4.
Figure 4 shows the structure of the gripper. a) It shows the completely plastic structure. b) It shows a TPU coating for handling the fruits
Figure 4.
Figure 4 shows the structure of the gripper. a) It shows the completely plastic structure. b) It shows a TPU coating for handling the fruits
2.4. Actuators
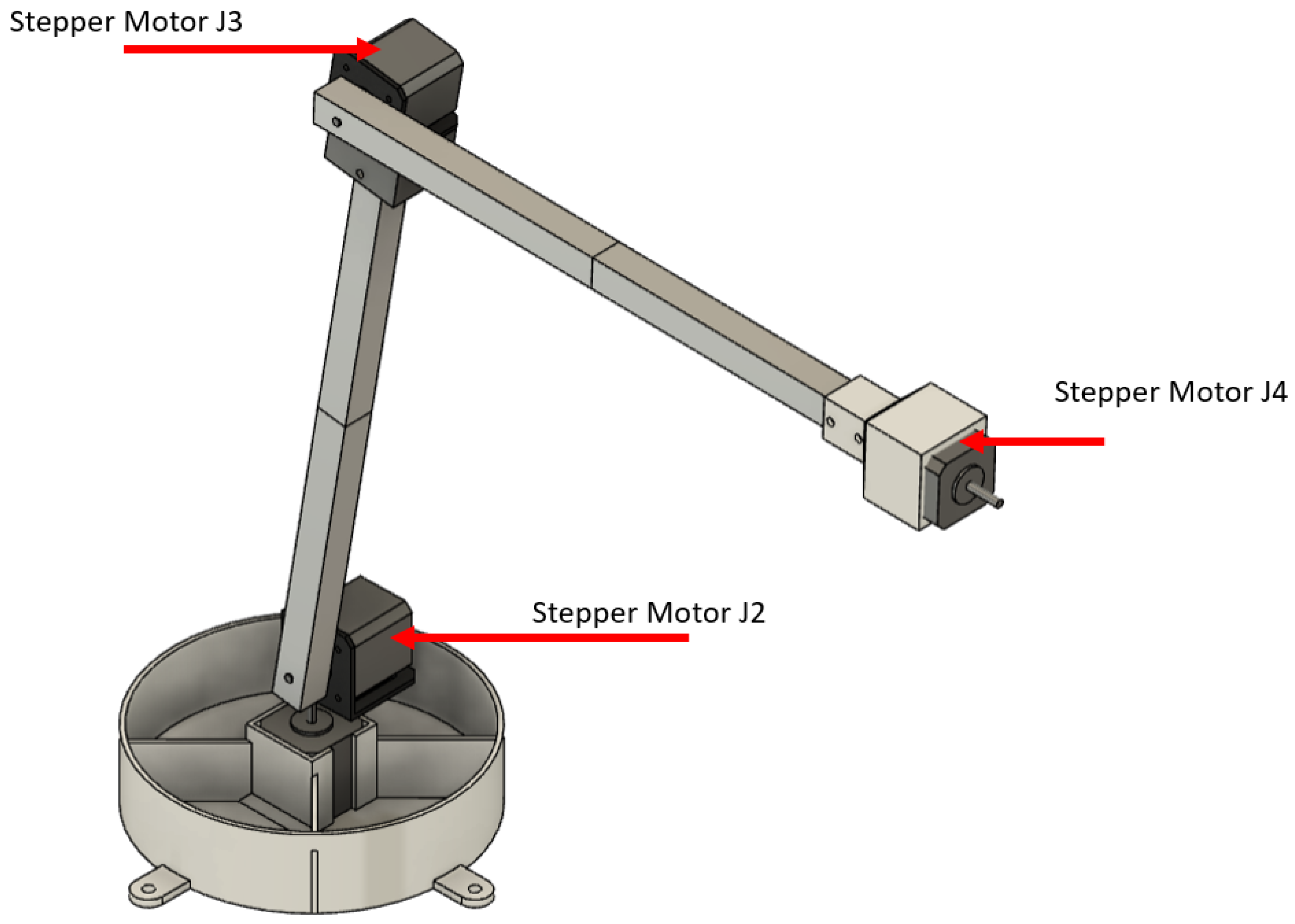
The movement of the robotic arm is controlled by NEMA 17 stepper motors, which provide high precision in controlling the angular position. Stepper motors were chosen for their capability to execute controlled movements without the need for a complex feedback system, thereby simplifying the design and reducing costs [4]. Furthermore, this type of motor enables smooth and precise control over the four degrees of freedom of the arm, ensuring that the system can maneuver effectively within agricultural environments. The reliability and accuracy of stepper motors make them an ideal choice for applications requiring meticulous movement, such as fruit harvesting.
Figure 5.
Figure 5 shows the location of the stepper motors that generate the robot’s motion.
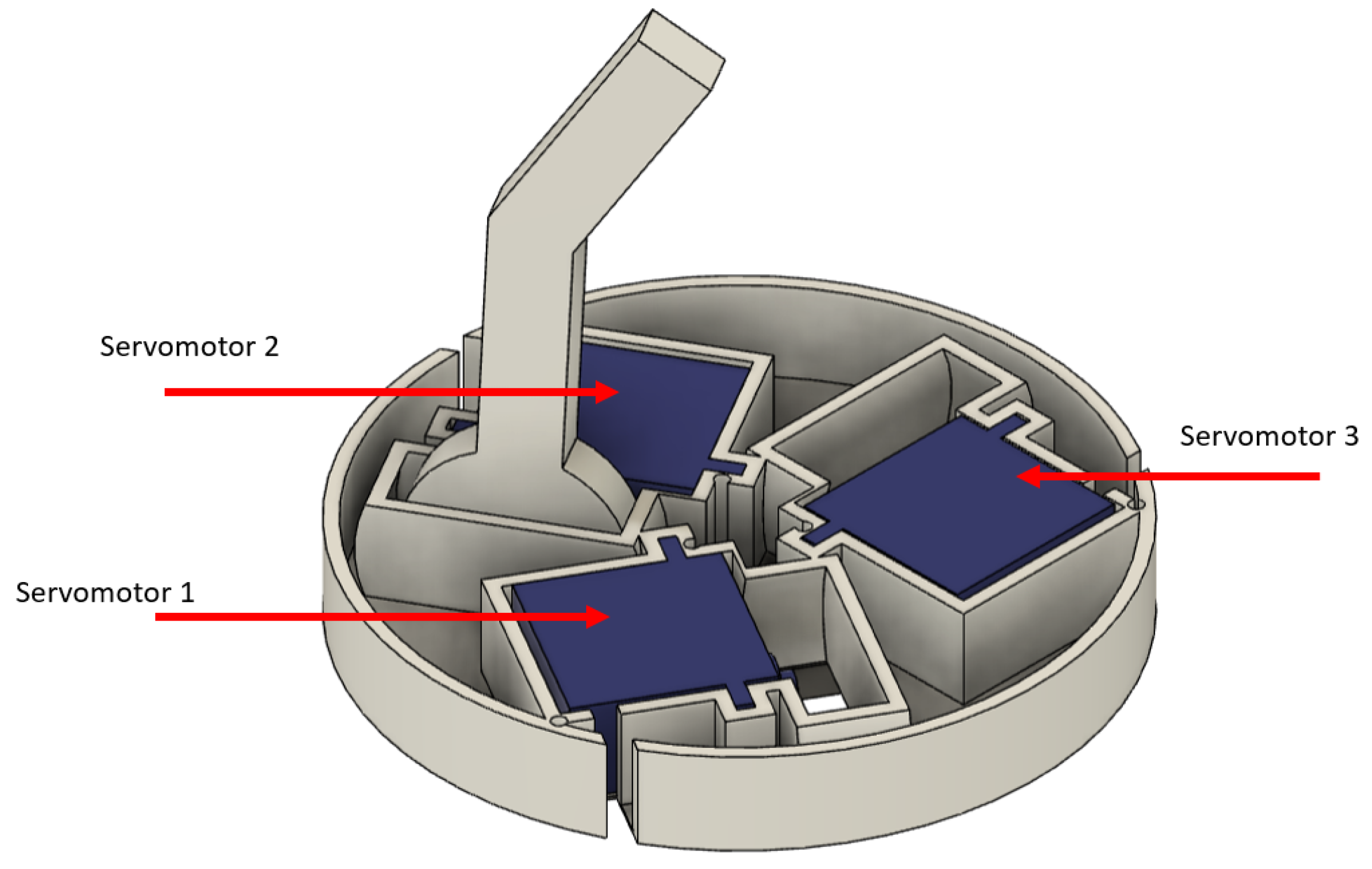
On the other hand, the control of the gripper is managed by servomotors, which offer finer and more precise movement control, particularly important for gripping and handling fruit. Servomotors allow for more accurate adjustments of the angle of the gripper tips, which is essential for achieving a secure and stable grip while minimizing the risk of damaging the fruit during handling. The combination of stepper motors in the arm and servomotors in the gripper provides an optimal balance of precision, control, and ease of implementation. This integration enhances the overall performance of the robotic system, making it well-suited for the delicate tasks involved in fruit harvesting.
Figure 6.
Figure 6 shows the location of the servo motors that act for the movement of the grippers.
Figure 6.
Figure 6 shows the location of the servo motors that act for the movement of the grippers.
2.5. Simulations and Analysis
The simulation of the movement of the robotic arm was conducted to evaluate its capability to operate effectively in an automated harvesting environment. Utilizing simulation software, the arm’s four degrees of freedom were modeled, each with specific ranges that facilitate precise and efficient movement within its operational area.
The work area of the robotic arm is designed to maximize efficiency during fruit picking. This design enables the arm to function in a three-dimensional space, allowing it to handle fruit from various positions effortlessly. The configuration of the axes of motion is outlined below, illustrating how the arm can adapt to different harvesting scenarios while maintaining optimal performance.
- J1 (Base): This shaft allows for a full 360-degree rotation, giving the arm ample mobility around its base. This continuous rotation is essential to adjust the orientation of the arm when approaching different fruits from different angles.
- J2 (Lower Arm): The second axis has a range of motion from 0 to 180 degrees, allowing the arm to be raised and lowered. This range is crucial to position the gripper at the right height to pick different types of fruit, adapting to their location on the plant.
- J3 (Elbow): This axis features a range of 270 degrees, which provides considerable flexibility in arm movement. The ability to articulate the elbow allows for a more precise approach to the fruits, ensuring that the gripper can reach and hold effectively.
- J4 (Gripper): Finally, the fourth axis, which controls the gripper, allows for 360-degree rotation. This functionality is essential for making fine adjustments to the gripper position, ensuring that fruits are picked safely and efficiently.
3. Results
The results of this study are derived exclusively from motion simulations performed on the CAD design of the robotic arm in Autodesk Fusion 360. This stage is crucial for validating the feasibility of the design prior to the physical construction of the prototype. The simulations conducted allowed for the observation of how the robotic arm interacts within its defined work area. The movements were assessed based on the four degrees of freedom, each conforming to the previously defined range of motion specifications. This evaluation ensures that the design meets the functional requirements necessary for effective operation in an agricultural setting.
- J1 rotation: Simulations showed that the base axis (J1) moves easily over a full 360-degree range, allowing the arm to orient itself in different directions without restriction. This is crucial in an agricultural environment, where flexibility and access to different collection points are essential.
- Movements of the J2 and J3: The lower arm (J2) and elbow (J3) demonstrated a coordinated operation. The J2, by moving from 0 to 180 degrees, allows the arm to rise and fall, making it easier to approach the fruit from different heights. The J3’s 270-degree range of motion provided remarkable flexibility, allowing the arm to extend and flex properly to reach the fruits in difficult positions.
- Gripper (J4) Adjustments: The rotation of the gripper (J4) showed that it is capable of making precise adjustments over a 360-degree range, ensuring that it can adapt to different angles of entry when picking fruit. This adjustability is vital to minimize damage to produce during harvest.
The simulations indicated that the design of the robotic arm shows significant promise in terms of operational efficiency. The integration of stepper motors and servo motors facilitates precise timing, resulting in smooth and controlled movements. These characteristics are essential for successful fruit-picking operations, where both speed and finesse are critical factors. Throughout the simulations, seamless transitions between movements were observed, suggesting that the design is not only functional but also intuitive. This adaptability implies that the robotic arm can quickly respond to changes in the environment, a highly desirable trait in agriculture, where conditions can vary.
It is important to note that, since only the movements have been simulated and no physical construction or load calculations have been conducted, the results remain preliminary. The next phase of the project should involve the construction of the prototype and testing under real conditions, which will provide empirical data to validate or refine the findings obtained during this simulation phase. Additionally, future studies may focus on integrating sensors to enhance the arm’s capability to identify and select specific fruits, as well as optimizing control algorithms to improve picking accuracy and efficiency. This emphasis on simulation and design lays a solid foundation for the future development of the robotic arm, ensuring that the practical needs of fruit picking in agricultural settings are effectively addressed.
4. Discussion
The simulation of the robotic arm for automated harvesting represents a critical step in the advancement of agricultural technologies. This study has demonstrated the feasibility of the design, highlighting its capacity to operate effectively within a fruit-picking environment. By focusing on motion simulation, we have provided a clear understanding of how the arm can interact with its surroundings, which is essential for enhancing efficiency in modern agriculture.
The design of the robotic arm features an internal aluminum skeleton combined with an external PETG plastic structure, effectively merging the strength of aluminum with the versatility of PETG. This choice of materials not only contributes to the arm’s lightweight nature and ease of manufacturing through 3D printing, but also ensures it can withstand the rigors of agricultural tasks. Additionally, the selection of a three-pronged gripper made from TPU offers the flexibility needed to handle delicate fruits without causing damage, a crucial consideration in harvesting operations.
Based on the results obtained from the simulations, we intend to proceed with the construction of the robotic arm prototype in the near future. This phase is vital for validating the theoretical designs created in Fusion 360. Physical construction will enable real-world testing, providing empirical data regarding the arm’s functionality, load capacity, and overall performance in the field.
The construction process will incorporate stepper motors for the arm and servo motors for the gripper, both of which have been successfully simulated at this initial stage. These motors will ensure precise control of each joint, allowing for smooth and coordinated movements during the harvesting process.
Transitioning from simulation to physical construction will require additional considerations, such as optimizing control algorithms and integrating sensors. These components will enhance the robotic arm’s accuracy in identifying and harvesting specific fruits while adapting to variations in the agricultural environment. Furthermore, implementing feedback systems could provide a greater degree of autonomy and adaptability, which are increasingly valued in precision agriculture.
In summary, the simulation of the robotic arm has established a solid foundation for future prototype development. The intention to construct the robot soon underscores our commitment to innovation in automated fruit harvesting. As we progress towards construction and field testing, this project aims not only to improve harvesting efficiency but also to contribute to the development of sustainable technologies in agriculture, addressing the growing demand for more efficient and environmentally friendly harvesting methods.
Research in this area not only opens doors to new possibilities in agricultural automation but also serves as a model for the development of future robotic projects in agriculture and other fields.
5. Conclusions
This study has demonstrated the feasibility of designing a robotic arm for automated fruit harvesting, grounded in motion simulations conducted using Autodesk Fusion 360. Through these simulations, we have successfully validated the ranges of motion associated with the arm’s four degrees of freedom, providing a comprehensive understanding of its functionality and versatility in an agricultural setting.
The proposed design integrates an internal aluminum skeleton with an external structure made of PETG plastic, optimizing both strength and lightness while facilitating production through 3D printing. The inclusion of a three-point gripper crafted from TPU ensures gentle handling of fruits, a crucial factor in minimizing damage during the harvesting process.
Furthermore, we have outlined a clear plan to progress toward prototype construction in the near future. This phase is essential for conducting empirical tests that validate the simulation results and enable necessary adjustments to the design and control systems. The integration of stepper motors and servo motors is specifically intended to ensure precise and efficient control, which are critical components for the robot’s success in harvesting tasks.
The path forward involves not only the construction and testing of the prototype but also the potential incorporation of additional technologies, such as sensors and feedback systems, which would enhance the autonomy and adaptability of the robotic arm. These innovations are vital for addressing current challenges in agriculture, where the objective is to improve both the efficiency and sustainability of harvesting processes.
In conclusion, this project represents a significant advancement in the development of robotic technologies applied to agriculture and establishes a foundation for future research and development in agricultural automation. As we progress toward building and testing the prototype, this robotic arm is anticipated to contribute to the optimization of harvesting practices, offering effective and sustainable solutions within the agricultural sector.
Author Contributions
Conceptualization, M.S.; Methodology, M.S.; Formal Analysis, M.S. and P.P.; Investigation, M.S. and P.P.; Data Curation, P.P.; Writing—Original Draft Preparation, M.S.; Writing—Review and Editing, P.P.; Supervision, P.P.; Validation, M.S. All authors have read and agreed to the published version of the manuscript.
Funding
The author(s) declared having received the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Universitario Rumiñahui as part of the research department.
Acknowledgments
The activities that gave rise to the results presented were carried out in the context of the project to develop a fruit harvesting robot. This project is in its initial stage and the research gave rise to the results presented, with the support of the Rumiñahui University Institute. We deeply appreciate the collaboration of all the researchers, students and professionals involved in this project, whose dedication and effort have been fundamental to achieving our objectives.
Conflicts of Interest
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
References
- Bechar, A., & Vigneault, C. (2017). Agricultural robots for field operations: Concepts and components. Biosystems Engineering, 149, 94-111. [CrossRef]
- Cai, J., Guo, W., Chen, X., Zhang, Q., & Zhang, D. (2021). Robotic technology and interactive design in agriculture: A review. Computers and Electronics in Agriculture, 187, 106281. [CrossRef]
- García, F. A., & Hevia, R. (2018). Design and development of a robotic arm for agricultural applications. Journal of Robotics and Automation, 3(2), 45-52. [CrossRef]
- Hayashi, S., et al. (2010). A machine vision system for tomato harvesting robot. Robotics and Autonomous Systems, 58(10), 1142-1147.
- Hayashi, S., Ganno, K., Ishii, M., & Tanaka, I. (2010). Robotic harvesting system for eggplants. Biosystems Engineering, 105(4), 528-536. [CrossRef]
- Le Floc’h, L., Rabatel, G., Perret, J., & Rabatel, G. (2018). Robotic systems in precision agriculture: State of the art and future trends. IEEE Robotics & Automation Magazine, 25(3), 67-78.
- Roba, G. M., Hernandez-Moreno, D., Aitor, B. J., García-Gil, C., & Bachiller, A. M. (2021). Finite element analysis and optimization of lightweight robotic arms for agriculture. Applied Sciences, 11(10), 4567. [CrossRef]
- Silwal, A., Davidson, J. R., Karkee, M., Mo, C., Zhang, Q., & Lewis, K. (2017). Design, integration, and field evaluation of a robotic apple harvester. Journal of Field Robotics, 34(6), 1140-1159. [CrossRef]
- Silwal, A., et al. (2017). Design and field evaluation of a robotic apple harvester. Journal of Field Robotics, 34(6), 1143-1159.
- Williams, M., De Lacy Costello, B., Adamatzky, A., & Shannon, K. (2019). Tactile sensing in agricultural robotics: Current technology and applications. Frontiers in Robotics and AI, 6, 43. [CrossRef]
- Zhang, Z., Qian, Y., & Zhou, X. (2020). Mechanical design and kinematic analysis of an agricultural robot for picking fruit. Agricultural Engineering International: CIGR Journal, 22(1), 1-11.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



