Submitted:
12 September 2024
Posted:
13 September 2024
You are already at the latest version
Abstract
The effective macroscopic model describing interactions of a viscous compressible heat-conducting fluid and a two-level fine bristly thermoelastic structure is derived from microstructure by means of the Allaire–Briane multi-scale convergence method. This new model naturally generalizes the isothermal formulation earlier constructed by the authors in 2020, see in Siberian Electronic Mathematical Reports, vol. 17 (https://doi.org/10.33048/semi.2020.17.100). In applications, the established model can be used, for example, in description, with account of heat transfer phenomemon, of airflow near surface of plant’s leaf, in simulation of epithelium surfaces of blood vessels, and in design of biotechnological devices operating in liquids.
Keywords:
compressible thermofluid
; thermoelastic solid
; Stokes–Fourier equations
; linear thermoelasticity equations
; homogenization
; periodic structure
; biotechnology
; bionics
MSC: 35D30; 35Q92; 74F10; 92B05
1. Introduction
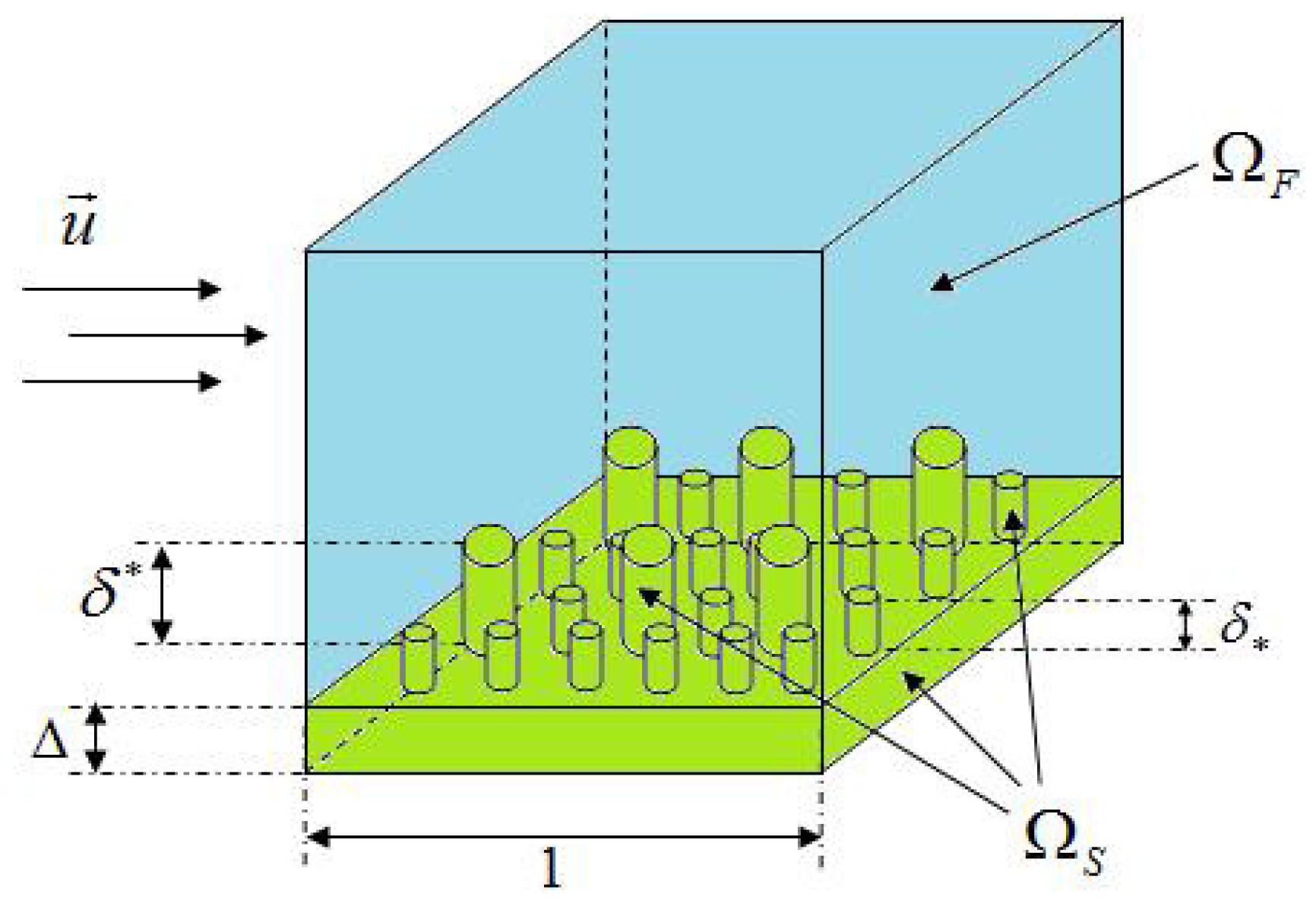
We consider the linearized mathematical model of joint motion of a viscous compressible heat-conducting fluid (thermofluid) and a flat thermoelastic plate with attached bristles. We assume that, in dimensionless variables, the viscous thermofluid and the bristly plate occupy the three-dimensional unit cube . The flat plate lies at the bottom of the cube and fills in layer (). The bristles are modeled as thermoelastic cylinders that are very frequently periodically located on the upper surface of the flat plate, orthogonally to this surface. There are cylinders of two different sizes. The shorter and at the same time thinner cylinders are located on the upper surface of the flat plate an order or several orders of magnitude more often than the taller and thicker ones. The heights of the cylinders are fixed and equal to and , where . The dimensionless distance between the symmetry axes of two adjacent tall cylinders is , while the distance between the symmetry axes of two adjacent short cylinders is . Here is a small positive parameter.
The motion of the viscous thermofluid is described by the linearized non-stationary Stokes–Fourier equations and the motion of the thermoelastic bristly plate is governed by the classical non-stationary equations of linear thermoelasticity. On the fluid-solid interface, continuity of velocity, temperature, normal stress, and normal heat flux is prescribed. The system consisting of the Stokes–Fourier equations, the linear thermoelasticity equations, and the fluid-solid interface conditions is endowed with the set of initial (in time t) conditions and boundary conditions on . The velocity field in the fluid, the displacement field in the bristly plate, and the distribution of temperature in the whole fluid-solid continuum are the sought functions in the system. In this article, the above described dimensionless model incorporating the small parameter is called Model . Its precise formulation along with the detailed description of the fine bristly structure is given further in Section 2, Section 3. In addition, Section 2 provides a result on the existence and uniqueness of weak solutions to Model for any fixed .
In the formulation of Model , each bristle is distinguished. Therefore, this model describes the microscopic behavior of the thermomechanical system under study. Such description can be called the ‘precise’ one. However, Model is inappropriate for practical analysis: from the computational point of view, the great amount of bristles leads to necessity of use of very fine meshes in numerical analysis, which leads to an inaccessible amount of calculations. This circumstance motivates to substitute ‘the precise’ Model by an averaged approximate one that does not contain the small parameter . In accord with this, the aim of the present study is to carry out and justify the homogenization procedure, i.e., to pass to the limit in Model as , and to derive a closed system of effective relations that describes the behavior of the thermomechanical system on the macroscopic level. To this end, in Section 4 we recall and in Section 5 we apply the Allaire–Briane multi-scale convergence method and, as the result, derive the three-scale homogenized system of equations and boundary conditions for the set consisting of the respective macroscopic, mesoscopic and microscopic homogenized velocities u, , and and the respective macroscopic, mesoscopic and microscopic homogenized temperatures , , and . We call this three-scale system Model H-3sc.
In principle, Model H-3sc serves as a solution to the homogenization problem, since its formulation does not contain the small parameter and, therefore, gives an averaged description of the thermomechanical system. At the same time, the system of equations in Model H-3sc is nonclassical and looks very unusual. In order to clarify its physical essence and make possible applications easier, in Section 6 and Section 7, we fulfill the full asymptotic decomposition, which amounts to the gradual scale separation. As the result, we construct the desired effective limit model for the pair of macroscopic velocity and temperature solely. We state the variational formulation of this model in Section 7 and call it Model H-var. In Section 8, we state its equivalent, in the sense of the theory of distributions, integro-differential formulation and call it Model H-ID. This model describes the evolution of the thermomechanical system at the macroscopic level. Model H-ID consists of the classical system of linear thermoelasticity equations for the purely thermoelastic flat plate , the two systems of non-classical non-local in time integro-differential Kelvin–Voigt-type equations of thermoviscoelastic layers and , the classical Stokes–Fourier equations of the pure fluid component , the set of the natural conditions on the discontinuity surfaces , , and , and the set of initial (in time) and boundary (on ) conditions for velocity and temperature. After Model H-ID is formulated, in Section 9 we propose a procedure for computing effective physical characteristics of the homogenized medium.
Let us remark that the mathematical modeling of bristly structures immersed in liquid or gas on macroscopic scales has a fairly notable history. Almost ninety years ago, in 1938, a rather simple model was proposed in the monograph by S. Goldstein [1][Secs. 53 and 145]. In this model, a laminar flow around a flat plate with a single orthogonally welded pin is considered. The air flows in parallel to the plate. There are found the conditions for the airflow to remain laminar after passing by the pin. The obvious idea that the flow remains laminar again after flowing around another similar pin leads to the conclusion that Goldstein’s model can be naturally generalized to cases of any number of pins, that is, to cases of bristly structures. Such a generalization was successfully adapted in a number of works for studying aerodynamics in a neighborhood of a plant leaf with trichomes being taken into account, see, for example, [2,3], [Ch. X]. Trichomes are bristles (fuzz) on a leaf epithelium. It is worth noting that Goldstein’s model [1] has its origins in the theory of the wing in aeronautics. As a matter of fact, Goldstein’s model and its generalizations [2,3] are strictly restrained to the laminar regimes and are inapplicable for studying more complex situations of flow. A much more general macroscopic model, covering a wide range of interactions between a bristly plate and a fluid flow around it, was constructed by K.-H. Hoffmann, N.D. Botkin and V.N. Starovoitov in 2005 in [4] by the homogenization method starting from the classical Stokes equations of viscous compressible fluid and classical Lamé’s equations of linear elasticity. This model is isothermal, and it is based on a microstructure with frequently and periodically arranged cylindrical elastic bristles of the same size. In [4], the authors give the full justification of the homogenization procedure and fulfill a series of numerical experiments that show perfect consistency with physical observations.
The study in [4] was motivated by demand in mathematical modeling and design of aptamer-based biosensors: in [4][Introduction] the authors suggested that `one can impress’ (inside the biosensor) ‘the aptamer protein layer as a periodic bristle or pin structure on the top of the gold film contacting the liquid’. Since 2005, based on the Hoffmann–Botkin–Starovoitov model (from [4]), several computational algorithms for modeling biosensors have been created and the corresponding numerical experiments have been carried out [5,6,7]. More specifically, article [5] describes a numerical method and a program for calculating dispersion relations for surface and bulk acoustic waves in multi-layered anisotropic structures that may contain specific bristle-like layers in contact with liquids. This study is of great importance from the point of view of biosensor applications, since the numerical method takes into account the piezoelectric properties of materials, the ability to work with very thin layers and adequate treatment of the interface between a solid bristle-like structure and a liquid. In [6], an interesting approach for simulation of wave patterns in surface acoustic wave biosensors is proposed. This approach relies on [4] and involves a rather subtle application of the differential games theory. Feasibility of this approach is verified in [6] by a set of numerical experiments. The most recent article [7] develops the concepts obtained in [4,5] for investigating the glycocalyx, `a polysaccharide polymer molecule layer on the endothelium of blood vessels that, according to recent studies, plays an important role in protecting against diseases’ (citation from [7]).
At the same time, since the Hoffmann–Botkin–Starovoitov model is based on the most fundamental laws of continuum mechanics and does not contain in its general form any specific relationships related to certain properties of biosensor components, its applicability can be expanded for a much larger number of phenomena related to bristly structures, rather than only with processes in biosensors. In particular, the Hoffmann–Botkin–Starovoitov model can be regarded as a generalization of Goldstein’s model [1,2,3] for (not necessarily laminar) airflow near plant’s leafs, in a sense.
Now, let us note that, for many reasons arising from nature and technological demands, it is favorable to consider bristly structures including bristles having two distinct sizes, as in the formulation of Model in the present article. For example, in the general case, trichomes on the same leaf of a plant may belong to different types depending on length and form, which should be taken into account when studying airflow near the leaf. A characteristic feature is that the number of trichomes of different length has a different order — on a plant leaf, there are quite a lot of short trichomes for one long trichome [8,9,10]. Another possible application of models of two-level bristly structures interacting with liquids can be found in bionics (or biomimicry). Biomimicry describes the processes in which ideas and concepts developed by nature are translated into technology. According to the observations made in [11], bristles, as a rule, have a strong effect on the wettability of plates: plate surfaces can be superhydrophobic, self-cleaning (superoleophobic) and have low adhesion, which is often very advantageous properties of materials. Two-level (hierarchical) roughness structures are typical for superhydrophobic surfaces in nature. For example, the effect of self-purification in polluted reservoirs using a two-level trichome structure is observed in lotus: in [12][Sec. 42.4.3]BJN, the question of how to create an artificial two-level superhydrophobic surface similar to the surface of a lotus is discussed in detail.
In [13], the Hoffmann–Botkin–Starovoitov model [4] was generalized onto the case of two-level bristly structures in the isothermal case. The model that we construct in the present article is a natural generalization to non-isothermal cases of the Hoffmann–Botkin–Starovoitov isothermal models built earlier for single-level [4] and two-level [13] bristly structures.
In the end of this introduction, firstly, we note that, in the present work, the vast majority of the results and technical calculations that do not directly relate to the temperature function and its limits (as ) coincide with those obtained in the isothermal case in [13]. Therefore, in this article we do not repeat these calculations and present the corresponding results without proof, limiting ourselves to precise references to the arguments from [13]. Secondly, we would like to notice that the content of the present article involves very many notations, which is a usual thing in studies of homogenization problems. Therefore, for convenience of reading we add an appendix in the end of the article, where we aggregate a fairly comprehensive list of used notations.
2. Basic Formulation of ‘Thermofluid–Structure’ Interactions
According to the fundamentals of continuum mechanics [14][Ch. I], the most general model of joint motion of a heat-conducting elastic body and a viscous thermofluid consists of the mass, linear momentum, and energy balance equations, the first and the second laws of thermodynamics in each phase, individual state equations, determining thermomechanical behavior in each phase, and certain conditions on the fluid-solid interface. Assuming a priori, that perturbations of the considered thermomechanical system are small about some rest state, applying in this view the classical linearization formalism [15][§ 8.1] to the equations of the most general model and passing to the proper dimensionless variables, we arrive eventually at the closed system of linear equations of ‘fluid-solid’ interactions. The initial-boundary value problem for this system is formulated below and is considered further in the paper.
Model . (Basic formulation of ‘thermofluid – thermoelastic structure’ interactions. The dimensionless form.) Let be divided into two disjoint subdomains and and the Lipschitz boundary between them, so that the fluid occupies subdomain , and the plate with attached bristles occupies subdomain . Let be a given moment of time.
Find a velocity field : , a displacement field : , and a temperature field : satisfying the equations
the interface conditions
the initial conditions
and the conditions on the fixed boundary :
In this formulation, is a small positive parameter that characterize the ratio between the characteristic lengths of the microscale and the macroscale. Its precise notion will be given in Section 3.
Equations (1a)–(1b) are the linearized non-stationary Stokes–Fourier equations of compressible heat-conducting fluid, equations (1c)–(1d) are the classical equations of linear thermoelasticity. Relations (1e)–(1g) are the continuity equations on the interface for velocity, temperature, and the normal stresses and heat fluxes, respectively. In (1a) and further in the paper, by we denote the symmetric part of the gradient of some enough regular vector-function : , . The rest of the notation for differential operators in (1) is quite standard. In (1a) and further in the paper, by we denote the Volterra operator:
By we denote the identical transformation in , i.e., , where is Kronecker’s symbol. In (1e)–(1g), the following notation for values of temperature on interface is used: for any we set
Vector is the unit normal to at a point , pointing into .
Dimensionless coefficients , , , , , , , , , , and are constant, positive and independent of . They are given and relate to the dimensional physical characteristics of the problem via the following identities:
Here is the characteristic size of (measured, for example, in meters: m); (s) is the characteristic duration of physical processes; () is the atmosphere pressure; g () is the acceleration of free fall; () is the mean density of air at the temperature 273 K and at the atmosphere pressure; (K) is a reference temperature; (K) is the temperature difference between the boiling- and freezing-points of water at the atmosphere pressure. Dimensional coefficients , , , , and in the fluid phase are respective shear and bulk viscosities, mean density, heat conductivity, and specific heat capacity at constant pressure; the dimensional coefficient characterizes the compressibility of the fluid. Dimensional coefficients , , and in the solid phase are respective mean density, heat conductivity and specific heat capacity at constant pressure.
is the dimensionless elastic stiffness tensor. Its components () can be arbitrary up to base restrictions so that any anisotropic solid can be considered. We have
components are constant, and there are fulfilled the symmetry condition
and the positive-definiteness condition: there exists a constant such that
Here and further, we deal with symmetric -matrices, say, such that . We denote the class of these matrices by . Note that demands (2) and (4) perfectly meet the fundamental principles of Newtonian mechanics.
Notation 1.
Above in this section and further in the article, we use the conventional notation for the inner products of fourth-rank tensors and -matrices and for the dyads of -matrices and vectors. More precisely, is the inner product (convolution) of a fourth-rank tensor and a -matrix . It is the -matrix defined by the formula
The inner product (convolution) of two -matrices and is the scalar defined by formula
In particular, we have
for all fourth-rank tensors and -matrices and .
The dyad of two -matrices and is the fourth-rank tensor defined by formula
and the dyad of two vectors a and b is the -matrix defined by the formula
In particular, we have
for all -matrices , , and , and for all vectors a, b, and c.
In the formulation of Problem , the dimensionless elastic stiffness tensor relates to the dimensional elastic stiffness tensor via the identity , -matrices and are the dimensionless matrices characterizing thermal dilatation in the fluid and solid phases, respectively; these matrices are constant, symmetric, and they relate to the dimensional matrices and via identities
The sought dimensionless velocity , displacement and temperature relate to the respective dimensional distributions , and via identities
Finally, f is the dimensionless density of distributed mass forces and and are volumetric dimensionless densities of external heat application in the fluid and the solid phases, respectively. We have
where , and are the corresponding dimensional thermomechanical characteristics.
The initial distributions , , , , and in (1a), (1f) and (1h)–(1j) and the boundary distributions and in (1k) and (1m) are given.
For the further purpose of homogenization, it is necessary to introduce the proper notion of weak solution to Model , uniform in the whole domain . To this end, let us follow [4][Sec. 2.2] and [13][§ 2].
Using (2), we rewrite equation (1c) and condition (1i)1 equivalently as
and equation (1d) as
Here is the velocity vector.
We accept the following two assumptions on the initial data in Model .
Assumption 1.
We suppose that the initial data for velocity
given in the whole cube Ω, does not depend on ε. In other words, we impose an independent of ε uniform initial velocity field on Ω.
Assumption 1 is consistent with the requirement that the initial velocity field is continuous in the whole cube .
Assumption 2.
We suppose that the initial distribution of pressure and the initial displacement are defined in the whole cube Ω, do not depend on ε, and along with and satisfy the compatibility conditions
Relations (5a) and (5b) express, respectively, the smoothness of the initial stress and the initial heat flux in the whole cube .
Now introduce into considerations the characteristic function of domain :
Taking into account this notation, we rewrite system (1) as the system of the uniform momentum and energy equations with the discontinuous coefficients in the whole cube :
supplemented with the set of initial and boundary data:
In (7a)–(7b) and further, we denote
In (7d), is a given vector-function, which is defined in the whole closed space-time domain and satisfies the boundary condition
Remark 1.
In Section 3 further, we will define the geometry of and such that and are independent of ε, and are simply connected, and and .
Now, we are in a position to introduce a notion of weak solution to Model .
Definition 1.
The pair of functions is aweak solution of Model , if it satisfies the regularity demands
the boundary conditions () in the trace sense, and the integral equalities
for all smooth test vector-functions , vanishing in a neighborhood of plane and boundary , and
for all smooth test functions vanishing in the neighborhood of plane and boundary .
The following result on the well-posedness of Model and on uniform (in ) estimates for the family of solutions to Model is valid.
Proposition 1.
Assume , , , , , , , and , where constant does not depend on ε.
Then, for any fixed , there is a unique weak solution to Model in the sense of Definition 1.
Moreover, the energy estimate
and the additional estimate
hold true, where constant depends on T, , , , , , , , , , , , , and , and constant depends only on and . (Here, is the constant from Korn’s inequality [16][Ch. I, § 2, Th. 2.1].) At the same time, both and are independent of ε.
Proof of Proposition 1 completely repeats the proof of Theorem 3.4 from [17][Secs. 4, 5] with slight natural modifications. □
Generally speaking, estimates (19) and (20) are sufficient to fulfill the homogenization of Model with the help of the method of three-scale convergence. However, some serious technical difficulties must be overcome in this case. To avoid that, we establish a stronger estimate for and , using Assumption A2:
Proposition 2.
Let , , , , , and Assumption A2 hold.
Then the family of solutions of Model satisfies the estimate
where is a constant independent of ε.
Proof of this proposition replicates the justification of Theorem 2.6 from [4]. Therefore we give it here rather schematically.
Let us introduce a pair of functions as the weak solution of the problem
where and .
By Theorem 3.4 from [17], the weak solution to problem (22) exists, is unique, and the energy estimates for this problem appears as follows:
which yields
where the positive constants and are independent of .
3. Fine Geometry of the Microstructure
In this section, we precisely define the geometrical forms of and , following the lines of [13][Sec. 3]. By this we introduce a two-level bristle structure.
Assume that taller bristles are located -periodically and shorter bristles are located -periodically in and . Parameter is small and positive: , . In order to describe exact locations of the bristles, we introduce mesoscopic variables, microscopic variables, and, correspondingly, the pattern mesoscopic cell and the pattern microscopic cell , each consisting of the two nonempty subdomains and the interface between these subdomains:
Here is the orthogonal projection of a taller bristle onto the flat surface of plate taken in scale, i.e., -times stretched. Analogously, is the orthogonal projection of a shorter bristle onto the flat surface of plate taken in scale.
We assume that both and are simply connected sets with smooth boundaries, each of them being locally situated on one side of the boundary. For simplicity, suppose that and do not have common points with and , respectively (see Figure 1 and Figure 2).
Further, let us additionally denote and introduce into consideration the characteristic functions and of sets and , respectively:
Extend functions and onto the whole spaces and 1-periodically.
Using the above introduced constructions, we set up a refined geometrical structure of domains and as follows.
Let be the thickness of plate without taking bristles in account. Let and be the heights of taller and shorter bristles, respectively. We assume that . In line with (6), define the characteristic function of domain as follows:
where
Thus, the structure of and is introduced. It is loosely shown on Figure 3.
4. The Allaire–Briane Three-Scale Convergence Method
Our aim now is to pass to the limit in the integral equalities (17)–(18) as . This limiting passage is based on the Allaire–Briane three-scale convergence method. We formulate the fundamentals of this method in the form adapted to the problem under consideration, following the lines of [13][Sec. 4].
Proposition 3. (G. Allaire, M. Briane, [18][Th. 2.4])Let be a bounded sequence in . Then there exist a subsequence from (still denoted by ) and a function
such that the limiting relation
holds true for all smooth and 1-periodic in and test functions .
Definition 2.
Proposition 4.
(i). [19][Sec. 3]The three-scale limit is unique, i.e., if sequence converges in the three-scale sense to functions then a.e. in .
(ii) [18][Th. 2.6]Let sequences and be bounded in and , respectively. Then there exist a subsequence from (still denoted by ) and a triple of functions , and such that
and , in the 3-sc. sense.
(iii) [18][Th. 4.6]Let sequences and be bounded in and , respectively. Let be defined by formula (Section 3). Then there exist a subsequence from and functions , and , with the same regularity properties as in assertion (ii), such that
where χ is the characteristic function of set , i.e.,
where
and
In the formulation of Proposition 4 and further in the article, the standard notation for the spaces of periodic functions, which have gradients, is in use:
Notation 2.
By and we denote the spaces of functions belonging to and , being 1-periodic in and , respectively, and satisfying the following normalization conditions:
By and we denote the gradient operators
5. The Limiting Passage in Model as . Homogenized Three-Scale Equations
Now, with the help of Propositions 1–4, we carry out the homogenization procedure for Model and derive the closed well-posed homogenized three-scale model. Namely, we establish the following theorem.
Theorem 1.
(i).There exist a subsequence from the family of weak solutions of Model , a triplet of vector-functions
and a triplet of scalar functions
satisfying the regularity requirements
and the limiting relations
(ii)The set of the six limit functions is the unique solution of the limitModel H-3scstated below.
Model H-3sc. (The homogenized three-scale model.) Find the set of six functions satisfying the regularity requirements (30), the integral equality
for arbitrary smooth test vector-functions , and such that , , and vanish in a neighborhood of and section , is 1-periodic in , and is 1-periodic in and , the integral equality
for arbitrary smooth test scalar functions , and such that , , and vanish in a neighborhood of and section , is 1-periodic in , and is 1-periodic in and , and the boundary conditions
in the trace sense.
Notation 3.
We denote , . For and , we define the linear integro-differential operator by formula
i.e., is defined by formula (9) with χ on the place of and ξ on the place of x.
Further, we denote
Also, let us write down the explicit expressions for symmetric parts of gradients and for divergences:
where and are arbitrary admissible vector-functions.
Proof of Theorem 1. (i) The limiting relations (31) in the three-scale sense follow immediately from Propositions 1–4 and the uniform estimates (19)–(21). The limiting relations (31a) and (31c) follow from (21) and the Rellich theorem.
Also, by Propositions 1–4 we have
in the 3-sc. sense. Additionally, from Proposition 1 and the Rellich theorem it follows that
(ii) Now insert the test vector-function of the form
into (17) and the scalar function of the form
into (18). In (36), , and are arbitrary smooth test vector-functions vanishing in a neighborhood of and section such that is 1-periodic in and is 1-periodic in and . In (37), , and are arbitrary smooth test functions vanishing in a neighborhood of and section such that is 1-periodic in , and is 1-periodic in and .
With this choice of test functions, passing to the limit as and using relations (31), (34) and (35), from (17) and (18) we derive exactly the variational equations (32a) and (32b). The boundary conditions (32c) (in the sense of traces) clearly follow from the boundary conditions (7d) as , due to sufficient regularity of , , u, and . Thus, the limiting passage as in Model proves the existence of solutions to Model H-3sc.
The uniqueness assertion for solutions of Model H-3sc is verified standardly for linear problems: the classical energy identity for Model H-3sc yields that the solution is identically equal to zero if , f, , , , , and are identically equal to zero. This proof is similar to justification of Theorem 1 from [13].
Theorem 1 is proved. □
6. Asymptotic Decomposition I: The Homogenized Two-Scale Model – Model H-2sc
The asymptotic decomposition follows the lines of [13][Secs. 6–12] with necessary modifications, and the most of technical calculations and results in the present article are exactly the same, as in [13]. Due to this, we outline the asymptotic decomposition procedure in the present article in an abridge form, focusing mainly on novel constructions and giving the precise references to the calculations and results from [13].
First, we solve the microstructure and thereby establish the following theorem.
Theorem 2.
Let the set of six functions be the solution of Model H-3sc. Then, its subset — the quadruple — serves as a solution toModel H-2scstated below.
Model H-2sc. (The homogenized two-scale model.) Find two vector-functions and and two scalar functions and satisfying the regularity requirements (30a), (30b), (30d), and (30e), the integral equality
for arbitrary smooth test vector-functions and such that and vanish in a neighborhood of and section and is 1-periodic in , the integral equality
for arbitrary smooth test scalar functions and such that and vanish in a neighborhood of and section and is 1-periodic in , and the boundary conditions (32c) in the trace sense.
Notation 4.
In (38) and further in the article, by , , and we denote the mean value of 1-periodic functions ϕ on , Θ, and Σ, respectively:
for all admissible 1-periodic in and functions ϕ.
By and we denote the (Lebesgue) measures of and , respectively:
Also, further we use the following notation for the elements of the Cartesian bases in and .
Notation 5.
The -matrix () is defined by the formula
or, in the component-wise form,
By () we denote the standard Cartesian basis vectors in . Thus .
The fourth-rank tensors , , , and , the -matrices , , , , , , and and the scalar functions and are uniquely defined by the solutions of the so-called cell problems posed on the microscopic pattern cell . In turn, the cell problems contain the complete information about the homogenized dynamics of the thermomechanical system at the level of the most fine bristle structure. This means that the thermomechanical behavior at the scale of variable is sublimed in the components of , , , , , , , , , , and , and in scalars and .
The exact expressions of , , , and have already been established in [13][Secs. 6, 7] along with the formulations of the corresponding cell problems. The exact expressions of , , , , , , , and are novel, as are the formulations of the cell problems associated with these expressions. Now, we present the exact expressions of , , , , , , , , , , , , and and the exact formulations of all the cell problems (posed on ) along with the results on their well-posedness. After this, we give a proof of Theorem 2.
We have
where
where
where
where
where
and
where
where
where
where
where
where
where
and
where
In (39)–(43), (47), (48), (50), and (51), vector-functions , , , and are the solutions of the following problems set on the microscopic pattern cell :
Problem Z1. ([13][page 1380].) Find a vector-function , which satisfies the regularity condition
and resolves the Stokes system
and the linear elasticity problem
in the weak sense, i.e., in the sense of the integral equality
(In (54), is the trace of the solution of the system (53) on the interface between and .)
Problem Z2. ([13][pages 1380-1381].) Find a vector-function (), defined in , which satisfies the regularity condition
and the integral equality
In (56), is the solution of Problem Z1.
Problem Z3. ([13][page 1381].) Find a vector-function , defined in , which satisfies the regularity condition
the integral equality
and the initial condition
where is the solution of Problem Z2.
Problem Z4. ([13][page 1382].) Find a vector-function , defined in , which satisfies the regularity condition
and the integral equality
Problem Z5. ([13][page 1382].) Find a vector-function , defined in , which satisfies the regularity condition
the integral equality
and the initial condition
where is the solution of Problem Z4.
Problem Z6. ([13][page 1382].) Find a vector-function (), defined in , which satisfies the regularity condition
and the integral equality
Problem Z7. ([13][page 1383].) Find a vector-function (), defined in the space-time parallelepiped , which satisfies the regularity condition
the integral equality (58b) (with on the place of ) and the initial condition
where the vector-function is the solution of Problem Z6.
Remark 2.
In (44)–(46) and (49), the vector-function and the scalar functions () are the solutions of the following cell problems:
Problem Z8. Find a vector-function , which satisfies the regularity condition
and resolves the variational equations
and
Problem Z9. Find a scalar function (), which satisfies the regularity condition
and resolves the variational equation
Variable plays the role of parameter in this formulation.
These two problems are well-posed:
Proposition 5.
Each of Problems Z8 and Z9 has a unique solution.
Proof of Proposition 5 is quite standard in the theory of linear elliptic problems, and we present it here rather sketchy. Firstly, by the Lax–Milgram theorem and the Poincaré–Wirtinger inequality, the variational equation (61b) has a solution , which is unique up to a constant vector. Secondly, by the classical theory of Sobolev spaces, inclusion is equivalent to the system consisting of inclusions and and the matching condition
where is the trace of and is the trace of on . For the known solution of (61b), by the Lax–Milgram theorem, the system (61c), (63) has a unique solution , furthermore, belongs to .
Shifting, if necessary, the values of on a constant vector , we obtain the unique solution to Problem Z8.
Finally, the variational equation (62b) is well-known in the elasticity theory (see, for example, [20]) and its unique solvability again follows from the Lax–Milgram theorem and Poincaré–Wirtinger inequality.
Proposition 5 is proved. □
Remark 3.
Let us turn to justification of Theorem 2.
Proof of Theorem 2. We separate variable standardly, by the procedure of asymptotic decomposition analogous to the one carried out in [13][Secs. 6, 7]. More certainly, we seek for the representation of and in the form
and
where , , , , , and are unknown functions that should be defined as the solutions of the cell problems. In order to formulate the proper cell problems, in (32a) we take
where is an arbitrary smooth 1-periodic in scalar function, vanishing in a neighborhood of and the section , and is an arbitrary 1-periodic smooth vector-function, in (32b) we take
where is an arbitrary smooth 1-periodic in scalar function, vanishing in a neighborhood of and the section , and is an arbitrary 1-periodic smooth function. Next, we insert (64) into (32a) and (64) and (65) into (32b). After this, properly collecting terms and performing simple but rather lengthy technical manipulations, we eventually deduce the set of the well-posed cell problems for determining the unique functions , , , , , and , see the above stated Problems Z1–Z9.
Finally, in (32a) we take and insert representation (64) for , and in (32b) we take , and insert (64) and (65) on the respective places of and . By this, we establish exactly the variational equations (38a) and (38b) and the representations (39)–(50) of the two-scale homogenized coefficients, which completes the proof of Theorem 2. □
The two-scale homogenized coefficients in the variational equations (38a) and (38b) have the following main properties.
Proposition 6. (i) The tensor-valued functions
and the matrix-valued function satisfy the regularity conditions
(ii)The tensor-valued function satisfies the finiteness property
the symmetry property
and the uniform positive definiteness property:
(iii)The tensor-valued function
satisfies the symmetry properties
, and
and the uniform positive definiteness property:
(iv) For a.e. matrix is symmetric.
(v) The matrix-valued functions
and the scalar functions and satisfy the regularity conditions
(vi)The matrix-valued function satisfies the symmetry property
and the uniform positive definiteness property:
(vii)Matrices , , , , and are symmetric for all , , and .
Notation 6.
In (73), by and the respective Laplace transforms in t of and are denoted. It is assumed that and vanish for .
Recall that the Laplace transform of a function is defined by the formula
Proof of Proposition 6. Assertions (i)–(iv) were proved in [13][Sec. 7]. Proof of assertion (v) is quite analogous to the justification of assertion (i): we have that the periodicity conditions (77) hold since the characteristic functions and are 1-periodic in in representations (44)–(50); the regularity properties (78)–(80) hold true due to the regularity properties (52), (57a), (58a), (60), (61a), and (62a) of the solutions of the cell problems. Assertion (vi) directly follows from (46) and (62b) by the same arguments, as in [21][Ch. V, § 3]. Assertion (vii) is evident due to expressions (44), (45), (47), and (48). □
7. Asymptotic Decomposition II: The Effective Macroscopic Model — Variational Formulation
On the second step of the asymptotic decomposition, we separate the intermediate (mesoscopic) level, which is characterized by the sought functions and and the independent variable . As the result, we derive the variational formulation of the effective macroscopic model describing the dynamics of the ‘fluid–structure’ interaction.
Theorem 3.
Let the quadruple of functions be the solution of Model H-2sc. Then, its subset — the pair — serves as a solution to Model H-var stated below.
Model H-var. (The homogenized model — variational formulation.) Find a velocity field and a temperature distribution satisfying the regularity requirements (30a) and (), the variational balance of momentum equation
for an arbitrary smooth test vector-function vanishing in a neighborhood of boundary and section , the variational balance of energy equation
for an arbitrary smooth test scalar function vanishing in a neighborhood of boundary and section , and the boundary conditions (32c) in the trace sense.
The fourth-rank tensors , , , , , and , the -matrices , , , , , , , , , , , and , and the scalar functions , , , and are uniquely defined by the solutions of the cell problems posed on the mesoscopic pattern cell . These cell problems contain the complete information about the homogenized dynamics of the thermomechanical system at the level of the taller bristles.
The exact expressions of , , , , , , and have already been established in [13][Secs. 10, 11] along with the formulations of the corresponding cell problems. The exact expressions of , , , , , , , , , , , , , , and are novel, as are the formulations of the cell problems associated with these expressions. Now, we present the exact expressions of , , , , , , , , , , , , , , , , , , , , , and and the exact formulations of the cell problems (posed on ) along with the results on their well-posedness. After this, we prove Theorem 3.
We have
where
and
where
and
where
and
where
and
where
and is given by formula (88e);
where
and
where
and
where
where
where
where
where
where
where
where
where
where
where
where
where
where
where
In (85)–(91), (99)–(102), and (106), vector-functions , , , and are the solutions of the following problems set on the mesoscopic pattern cell :
Problem Y1. ([13][page 1411].) Find a vector-function () defined in the pattern cell for all and satisfying the regularity condition
and the integral equalities
and
Problem Y2. ([13][page 1412].) Find a vector-function defined in for all and satisfying the regularity condition
and the integral equalities
and
Problem Y3. ([13][page 1412].) Find a vector-function () defined in for all and satisfying the regularity condition
and the integral equalities
and
In (109b), is the unit outward normal to the boundary of domain , and stands for an infinitesimal element of .
Problem Y4. ([13][page 1414].) Find a vector-function () defined in the set for all and satisfying the regularity condition
and the integral equalities
and
Problem Y5. ([13][page 1415].) Find a vector-function () defined in the set for all and satisfying the regularity condition
and the integral equalities
and
In (110b), (110c), (111b), and (111c), function () is the solution of Problem Y1.
Problem Y6. ([13][pages 1415–1416].) Find a vector-function defined in the set for all and satisfying the regularity condition
and the integral equalities
and
Problem Y7. ([13][page 1416].) Find a vector-function () defined in the set for all and satisfying the regularity condition
and the integral equalities
and
Remark 4.
Each of Problems Y1–Y7 has the unique solution [13][Propos. 8, 9, 11] and each of the vector-functions , , , and does not vary with change of on segments and [13][Remark 25], i.e.,
Also, for all , and [13][Remark 24].
In (92)–(98) and (103)–(105), vector-functions and and the scalar functions () are the solutions of the following cell problems:
Problem Y8. Find a vector-function defined in the pattern cell for all and satisfying the regularity condition
and the integral equality
Problem Y9. Find a vector-function defined in the set for all and satisfying the regularity condition
and the integral equality
where is the solution of Problem Y8.
Problem Y10. Find a scalar function () defined in the pattern cell for all and satisfying the regularity condition
and the integral equality
Problems Y8–Y10 are well-posed:
Proposition 7.
Each of Problems Y8, Y9, and Y10 has a unique solution.
Proof.
Due to the positive definiteness, symmetry and sufficient regularity of and and due to the sufficient regularity of (see Proposition 6), Problems Y8 and Y10 have the unique solutions by the Lax–Milgram theorem.
Applying the Laplace transform in t to (115b) and multiplying the resulting equation by s, where is the dual to t, we establish the variational equation
Here, is defined by formula (73), and Notation 6 for the Laplace transform is used. Since is positive definite and symmetric (see assertion (iii) of Proposition 6) and , , , , and are sufficiently regular (see Proposition 6 and formula (114a)), the variational equation (117) has a unique solution for by the Lax–Milgram theorem. In turn, due to one-on-oneness of the Laplace transform , we conclude that is the unique solution of the variational equation (115b) on segment , which completes the proof of the unique solvability of Problem Y9. □
Remark 5.
Due to Remark 3, the vector-functions and and the scalar functions () do not vary with change of on segments and , i.e.,
Remark 6.
Due to Remarks 3–5, from the explicit representations (85)–(106) it is clear that tensors , , , , matrices , , , , , , , , and scalars , are constant and tensors , , , , , , , , matrices , , , , , , , , , , , , , and scalars , , , , depend only on t and/or τ.
Let us turn to justification of Theorem 3.
Proof of Theorem 3. We separate variable standardly, by the procedure of asymptotic decomposition analogous to the one carried out in [13][Secs. 10, 11]. More certainly, we seek for the representation of and in the form
and
where , , , , , , and are unknown functions that should be defined as the solutions of the cell problems. In order to formulate the proper cell problems, in (38a) we take
where is an arbitrary smooth function vanishing in a neighborhood of section , is an arbitrary smooth function vanishing in a neighborhood of , and is an arbitrary 1-periodic smooth vector-function, in (38b) we take
where is an arbitrary smooth function vanishing in a neighborhood of and section and is an arbitrary 1-periodic smooth function. Next, we insert (118) into (38a) and (118) and (119) into (38b). After this, properly collecting terms and performing simple but rather lengthy technical manipulations, we eventually deduce the set of the well-posed cell problems for determining the unique functions , , , , , , and , see the above stated Problems Y1–Y10.
Finally, in (38a) we take and insert representation (118) for and in (38b) we take and insert (118) and (119) on the respective places of and . By this, we establish exactly the variational equations (84a) and (84b), which completes the proof of Theorem 3. □
The effective homogenized coefficients in the variational equations (84a) and (84b) have the following main properties.
Proposition 8.
(i).The tensor-valued functions , , , , , and and the matrix-valued function satisfy the following regularity conditions:
(ii)The tensor-valued function satisfies the finiteness property
the symmetry property
and the uniform positive definiteness property:
(iii)The tensor-valued function
satisfies the symmetry properties
and the uniform positive definiteness property:
(iv)For a.e. , tensor satisfies the symmetry properties
(v)For a.e. , matrix is symmetric.
(vi)The matrix-valued functions , , , , , , , , , , and the scalar functions , , , satisfy the following regularity conditions:
(vii)The matrix-valued function satisfies the symmetry property
and the uniform positive definiteness property:
(viii)Matrices , , , , , , , , , and are symmetric.
Notation 7.
In (127), by we denote the indicator function of the set :
Proof.
Assertions (i)–(v) of Proposition 8 were proved in [13][Sec. 11, Propos. 12].
Proof of assertion (vi) is quite analogous to the justification of assertion (i): we have that the regularity properties (133)–(137) hold true due to the regularity properties (107a), (111a), (112a), (113a), (114a), (116a) of the solutions of the cell problems (Problems Y1, Y5–Y10) and due to the regularity properties of the tensor-valued functions , , , , see assertion (i) of Proposition 6.
Assertion (vii) directly follows from representations (46), (98) and the integral equalities (46b), (116b) by the same arguments, as in [21][Ch. V, § 3].
Further, notice that tensors , , , and are symmetric due to the respective representations (39b), (41b), (40b), and (42b) and the symmetry property , see Remark 2. Now, the symmetry of follows from representation (92) and the symmetry of and (see assertion (vii) of Proposition 6); the symmetry of follows from representation (93) and the symmetry of , , and (see assertion (vii) of Proposition 6); the symmetry of follows from representation (94) and the symmetry of and ; the symmetry of follows from representation (95) and the symmetry of ; the symmetry of follows from representation (96) and the symmetry of and ; the symmetry of follows from (97) and the symmetry of ; the symmetry of follows from (99), the symmetry property , see Remark 4, and the symmetry of , see assertion (vii) of Proposition 6; the symmetry of follows from (100), the symmetry property (), see Remark 4, and the symmetry of and , see assertion (vii) of Proposition 6; the symmetry of follows from (101), the symmetry property and the symmetry of ; the symmetry of follows from (102), the symmetry property , see Remark 4, and the symmetry of . Proposition 8 is proved. □
8. The Effective Macroscopic Model — Integro-Differential Formulation
Analogously to [13][Sec. 12], we deduce that, in the sense of the theory of distributions, Model H-var is equivalent to the following initial-boundary value problem.
Model H-ID. (The homogenized model — integro-differential formulation.) Find a macroscopic velocity field and a macroscopic temperature distribution satisfying the following set of equations and initial, boundary and interfacial conditions.
▪ In , for , the fluid motion is governed by the Stokes–Fourier system
▪ In , for , the fluid-structure interactions are governed by the equations of linear thermoviscoelasticity with memory effects: the balance of momentum equation
and the energy equation
In (140c) and (140d), is the constant mean density and is the constant mean heat capacity of the homogenized thermoviscoelastic medium occupying layer ;
is the constant effective instantaneous viscous stress tensor,
is the constant effective instantaneous elastic stiffness tensor, and are two constant matrices corresponding to the effective instantaneous thermal dilatation, is the matrix of effective heat conductivity, the components of matrix and the scalar coefficient are the effective coefficients characterizing irreversible heat generation due to the combined effect of thermal dilatation and viscosity friction in ; the components of tensor
and matrices
and scalar are the time-dependent relaxation kernels determining influence of thermomechanical history of the medium occupying during the time period on the current state at the time moment t; the components of tensor
and matrices
and scalar are the additional time-dependent effective coefficients arising from the initial fluid-structure balance of stress and heat in .
▪ In , for , the fluid-structure interactions are governed by the equations of linear thermoviscoelasticity with memory effects: the balance of momentum equation
and the energy equation
In (140e) and (140f), is the constant mean density and is the constant mean heat capacity of the homogenized thermoviscoelastic medium occupying the layer ;
is the constant effective instantaneous viscous stress tensor,
is the constant effective instantaneous elastic stiffness tensor, and are two constant matrices corresponding to the effective instantaneous thermal dilatation, is the matrix of effective heat conductivity, the components of matrix and the scalar coefficient are the effective coefficients characterizing irreversible heat generation due to the combined effect of thermal dilatation and viscosity friction in ; the components of tensors
and matrices
, and , and scalars and are the time-dependent relaxation kernels determining influence of thermomechanical history of the medium occupying during the time period on the current state at the time moment t; the components of tensor
and matrices
and scalar are the additional time-dependent effective coefficients arising from the initial fluid-structure balance of stress and heat in .
▪ In , for , the motion of the elastic heat-conducting plate is governed by the classical equations of linear thermoelasticity: the balance of momentum equation
and the energy equation
▪ The macroscopic velocity and temperature satisfy the initial conditions
i.e., the initial conditions (7c).
▪ On the outer boundary of , the macroscopic velocity and temperature satisfy the conditions
i.e., the boundary conditions (7d), which are inherited from Problems , H-3sc, and H-2sc, successively.
▪ On interfaces , and , the standard matching relations hold, which are the classical conditions of continuity of velocity, temperature, normal stress, and normal heat flux.
Remark 7.
As in [13][Remark 28], we note that and are the restrictions of to the segments and , respectively; and and are the restrictions of to the segments and , respectively.
In equations (140a)–(140j), tensors , , , , , , , , , and , matrices , , , , , , , , , , , , , , , , , , , and , scalar coefficients , , , , , , , , , , , , , , , , , , and , scalar relaxation tensors , , and , the distributed mass force f, the volumetric densities of external heat application , , , , the initial functions , , , and , and the boundary functions and are considered to be given. Thus we obtain that Model H-ID is the integro-differential closed effective macroscopic homogenized model of ‘the compressible thermofluid – two-level fine thermoelastic structure’ interactions, where is the pair of sought functions.
We naturally formulate the notion of weak solutions of Model H-ID as follows.
Definition 3.
A pair of functions is calleda weak solution to Model H-IDif it is a solution of Problem H-var.
Theorem 3 immediately yields the following assertion.
Corollary 1.
Assume that , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , and are defined from the data of micro- and mesoscopic structure in accordance with formulas (39)–(51), (85)–(106) and solutions of Problems Z1–Z9 and Y1–Y10.
Then, for any given , , , , , , , such that , for , , and , there exists a unique weak solution of Model H-ID in the sense of Definition 3.
9. Concluding Remarks and Discussion
On the base of the constructions made in Section 5, Section 6, Section 7 and Section 8, we can now propose the following algorithm of determining the effective macroscopic physical characteristics of the reciprocal motion of the fine two-level thermoelastic bristle structure and the viscous compressible thermofluid, starting from the microstructure.
- (i)
- Using the given data of the microstructure, solve Problems Z1–Z9 to find , , , , , and .
- (ii)
- (iii)
- Using tensors , , , and and matrices , , , , and , obtained on the previous step, solve Problems Y1–Y10 to find , , , , , , and .
- (iv)
- Inserting the solutions of Problems Y1–Y10 into (85)–(106), calculate the homogenized macroscopic tensors , , , , , , matrices , , , , , , , , , , , , and scalars , , , and , respectively.
- (v)
- Provided with the data obtained on the previous step, solve Problem H-var (and, equivalently in the sense of distributions, Problem H-ID) to find the macroscopic velocity distribution u and temperature distribution .
This five-step algorithm is quite possible to implement numerically. In contrast, Model with a small is inaccessible for practical analysis due to the enormous amount of necessary calculations. The interim homogenized Models H-3sc and H-2sc also worth consideration in line with a possible numerical analysis.
Both from a purely theoretical point of view and from the point of view of promising applications in technology, Model H-ID serves as a generalization of previously constructed models [1,2,4,13] from the isothermal case to the case when the effect of heat transfer is taken into account. As it is mentioned in Section 1, application of Model H-ID can most likely be found in describing the airflow near the surface of a plant leaf, in modeling the epithelial surfaces of blood vessels, in modeling superhydrophobic and superoleophobic surfaces, as well as in designing biotechnological devices operating in liquids.
In future works, it would be useful and interesting to consider isothermal and non-isothermal Model -type systems taking into account transfer of admixture by a free flow of liquid (air) and sedimentation of the admixture particles on the surface of a two-level fine bristly structure. In such systems, the laws of balance of the admixture concentration in an open liquid (air) and on the solid-liquid (solid-air) interface can be taken in accordance with W. Hornung and W. Jaeger [22]. To homogenize the balance of the sedimented admixture on the solid-liquid (solid-air) interface, the Allaire–Damlamian–Hornung modified version of two-scale convergence [23] can be generalized and used. By this, one could make a further extension of study of bristly structures in interaction with liquids and gases based on [13] and the present article.
Author Contributions
Conceptualization, S.S.; methodology, S.S.; validation, S.S. and E.S.; formal analysis, S.S. and E.S.; investigation, S.S. and E.S.; writing—original draft preparation, S.S.; writing—review and editing, S.S. and E.S. The both authors have read and agreed to the published version of the manuscript.
Funding
S.S. was supported by the Ministry of Science and Higher Education of the Russian Federation under Project no. FZMW-2024-0003.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
10. Nomenclature
In this appendix, we provide a fairly comprehensive list of notations used in the article.
| Roman Symbols | ||
| Notation | Description | Introduced in |
| , | effective two-scale tensors | (39a), (41a) |
| , | tensors derived from microstructure | (39b), (41b) |
| , | effective two-scale tensors | (40a), (42a) |
| , | tensors derived from microstructure | (40b), (42b) |
| homogenized three-scale dimensionless | Notat. 3 | |
| thermal dilatation matrix | ||
| dimensionless thermal dilatation | (1a), (1c) | |
| matrices in fluid and solid, resp. | ||
| uniform notation for dimensionless | (11) | |
| thermal dilatation in | ||
| c | homogenized three-scale dimensionless | Notat. 3 |
| specific heat capacity | ||
| dimensionless specific heat capacities | (1b), (1d) | |
| in fluid and solid, resp. | ||
| uniform notation for dimensionless | (12) | |
| specific heat capacity in | ||
| symmetric parts of the gradients | Section 2, Section 5 | |
| , and , resp. | ||
| effective instantaneous elasticity tensor | (86a) | |
| instantaneous elasticity corrector term | (86c) | |
| on | ||
| instantaneous elasticity corrector term | (86b) | |
| on | ||
| matrix corresponding to the effective | (93a) | |
| instantaneous thermal dilatation | ||
| restriction of to | (93c) | |
| restriction of to | (93b) | |
| Cartesian basis vector in | Notat. 5 | |
| tensor derived from the meso- and | (90a) | |
| microstructures | ||
| restriction of to | (90a), Model H-ID | |
| restriction of to | (90a), Model H-ID | |
| tensor derived from the meso- and | (90c) | |
| microstructures | ||
| tensor derived from the meso- and | (90b) | |
| microstructures | ||
| matrix derived from the meso- and | (91a) | |
| microstructures | ||
| restriction of to | (91a), Model H-ID | |
| restriction of to | (91a), Model H-ID | |
| effective two-scale matrix | (43a) | |
| , | matrices derived from microstructure | (43b), (43c) |
| tensor derived from the meso- and | (91c) | |
| microstructures | ||
| tensor derived from the meso- and | (91b) | |
| microstructures | ||
| f | distributed mass force | (1a) |
| elastic stiffness tensor | (1c) | |
| effective elastic stiffness tensor in | (140e) | |
| effective elastic stiffness tensor in | (140c) | |
| Laplace image of the principle two-scale | (73) | |
| stress tensor multiplied by s | ||
| Laplace image of the principle effective | (127) | |
| stress tensor multiplied by s | ||
| effective two-scale matrices | (44a), (45a) | |
| effective constant matrices | (44b), (45b) | |
| corresponding to thermal dilatation | ||
| unit -matrix | Section 2 | |
| , | Volterra operator (primitive of function) | (2) |
| -matrix | Notat. 5 | |
| effective relaxation tensor | (87a) | |
| restriction of to | (87c) | |
| restriction of to | (87b) | |
| Laplace transform | (83) | |
| effective macroscopic matrices corresponding | (94a), (95a) | |
| to thermal memory effects | ||
| restriction of , resp., to | (94c), (95b) | |
| restriction of to | (94b) | |
| matrix of effective macroscopic | (98a) | |
| heat conductivity | ||
| restriction of to | (98c) | |
| restriction of to | (98b) | |
| , | effective two-scale matrices corresponding | (47a), (48a), |
| to thermal dilatation | (51a) | |
| restriction of to | (47b) | |
| restrictions of , resp., to | (48b), (51b) | |
| , | effective macroscopic matrices corresponding | (99a), (100a), |
| to thermal dilatation | (101a), (102a) | |
| restrictions of , resp., | (99c), (100c), | |
| to | (101b), (102c) | |
| restrictions of , resp., | (99b), (100b), | |
| to | (102b) | |
| restrictions of , resp., to | (48b), (51b) | |
| effective two-scale heat conductivity matrix | (46a) | |
| restriction of to | (46b) | |
| effective two-scale scalar coefficients | (49a), (50a) | |
| corresponding to thermal dilatation | ||
| restrictions of , resp., to | (49b), (50b) | |
| effective macroscopic scalar coefficients | (103a), (106a) | |
| restrictions of , resp., to | (103c), (106c) | |
| restrictions of , resp., to | (103b), (106b) | |
| macroscopic relaxation kernels | (104a), (105a) | |
| restrictions of , resp., to | (104c), (105b) | |
| restriction of to | (104b) | |
| homogenized three-scale uniform stress tensor | (33) | |
| uniform stress tensor in microscopic | (9) | |
| description | ||
| homogenized three-scale partial initial | (32a) | |
| data for stress | ||
| partial initial data for stress | (10) | |
| in microscopic description | ||
| unit normal to the fluid-structure interface | (1f), (1g) | |
| unit outward normal to | (109b) | |
| instantaneous viscous stress tensor in | (140e) | |
| instantaneous viscous stress tensor in | (140c) | |
| initial pressure distribution | (1a) | |
| effective relaxation tensor | (88a) | |
| tensors derived from the meso- and | (88c), (88d) | |
| microstructures | ||
| restriction of to | (88b) | |
| matrix derived from the meso- and | (88e) | |
| microstructures | ||
| viscoelastic relaxation tensors in | (140e) | |
| viscoelastic relaxation tensor in | (140c) | |
| heat relaxation matrices in | (140c) | |
| heat relaxation matrix in | (140c) | |
| s | argument of the Laplace transform image | (73), (83) |
| trace of a matrix | Notat. 1 | |
| u, | macroscopic velocity vector | Section 1 |
| initial macroscopic velocity vector | (1h) | |
| mesoscopic velocity vector | Section 1 | |
| microscopic velocity vector | Section 1 | |
| boundary macroscopic velocity distribution | (7d), (15) | |
| effective instantaneous viscosity tensor | (85a) | |
| instantaneous viscosity corrector term | (85c) | |
| on | ||
| instantaneous viscosity corrector term | (85b) | |
| on | ||
| matrix corresponding to the effective | (92a) | |
| instantaneous thermal dilatation | ||
| restriction of to | (92c) | |
| restriction of to | (92b) | |
| macroscopic displacement vector | Section 1 | |
| initial macroscopic displacement vector | (1i) | |
| effective relaxation tensor | (89a) | |
| tensor derived from the meso- and | (89b) | |
| microstructures | ||
| effective macroscopic matrices corresponding | (96a), (97a) | |
| to thermal memory effects | ||
| restriction of , resp., to | (96c), (97b) | |
| restriction of to | (96b) | |
| x | macroscopic position vector | Section 1 |
| vector | Section 3 | |
| , | solutions of the mesoscopic cell problems | Probl. Y1–Y10 |
| , | ||
| mesoscopic position vector | Section 3 | |
| , | solutions of the microscopic cell problems | Probl. Z1–Z9 |
| , | ||
| microscopic position vector | Section 3 | |
| Greek Symbols | ||
| Notation | Description | Introduced in |
| , , , | positive dimensionless ratios | (1), |
| , | Section 2 | |
| fluid-structure interface | Model | |
| thickness of elastic plate | Section 1 | |
| Kronecker’s symbol | Section 2 | |
| height of a shorter bristle | Section 1 | |
| height of a taller bristle | Section 1 | |
| small characteristic parameter of | Section 1 | |
| the periodic structure | ||
| extension of | (26b) | |
| characteristic function of | (25)1 | |
| , | macroscopic temperature | Section 1 |
| initial temperature | (1j) | |
| mesoscopic temperature | Section 1 | |
| microscopic temperature | Section 1 | |
| boundary temperature distribution | (1m) | |
| pattern microscopic cell | Section 3 | |
| liquid and solid parts of , resp. | Section 3 | |
| homogenized three-scale dimensionless | Notat. 3 | |
| heat conductivity | ||
| dimensionless heat conductivity | (1b) | |
| in fluid | ||
| dimensionless heat conductivity | (1d) | |
| in solid | ||
| uniform notation for dimensionless | (13) | |
| heat conductivity in | ||
| homogenized three-scale density | Section 5 | |
| fluid density | Section 2 | |
| density of the elastic body | Section 2 | |
| mean densities in and , resp. | (140e), (140c) | |
| uniform notation for density in | (8) | |
| mean value of on | (38) | |
| pattern mesoscopic cell | Section 3 | |
| liquid and elastic parts of , resp. | Section 3 | |
| homogenized three-scale characteristic | (28a) | |
| function of the fluid domain | ||
| characteristic function of the fluid domain | (26a) | |
| in microscopic description | ||
| extension of | (26c) | |
| characteristic function of | (25)2 | |
| homogenized three-scale | Notat. 3 | |
| volumetric dimensionless density | ||
| of external heat application | ||
| volumetric dimensionless densities | (1b), (1d) | |
| of external heat application in fluid | ||
| and solid, resp. | ||
| uniform notation for volumetric dimensionless | (14) | |
| density of external heat application in | ||
| domain of dimensionless macroscopic positions | Section 1 | |
| fluid domain and elastic body, resp. | Model , Section 3 | |
| fluid layer above all bristles | Section 1 | |
| elastic plate without bristles | Section 1 | |
| spatial layer, where the shorter bristles | Section 1 | |
| locate | ||
| spatial layer, where the taller bristles locate | Section 1 | |
| Some operators and binary operations | ||
| Notation | Description | Introduced in |
| divergence operators | Section 5 | |
| inner product (convolution) | Notat. 1 | |
| ⊗ | dyad | Notat. 1 |
| , | gradient operators | (29) |
| Laplace transform of a function : | (83) | |
| , | mean value of a function on , , | Notat. 4 |
| and , resp. | ||
References
- Goldstein, S. Modern Developments in Fluid Dynamics. An Account of Theory and Experiment Relating to Boundary Layers, Turbulent Motion and Wakes. Vol. I; Clarendon Press: Oxford, UK, 1938. [Google Scholar]
- Schreuder, M.D.J.; Brewer, C.A.; Heine, C. Modelled influences of non-exchanging trichomes on leaf boundary layers and gas exchange. J. Theor. Biol. 2001, 210, 23–32. [Google Scholar] [CrossRef] [PubMed]
- Vogel, S. Life in Moving Fluids: The Physical Biology of Flow, 2nd ed.; Pinceton University Press: Princeton, NJ, USA, 1994. [Google Scholar]
- Hoffmann, K.-H.; Botkin, N.D.; Starovoitov, V.N. Homogenization of interfaces between rapidly oscillating fine elastic structures and fluids. SIAM J.Appl. Math. 2005, 65, 983–1005. [Google Scholar] [CrossRef]
- Botkin, N.D.; Hoffmann, K.-H.; Pykhteev, O.A.; Turova, V.L. Dispersion relations for acoustic waves in heterogeneous multi-layered structures contacting with fluids. J. Frankl. Inst. 2007, 344, 520–534. [Google Scholar] [CrossRef]
- Botkin, N.; Turova, V. Simulation of acoustic wave propagation in anisotropic media using dynamic programming technique. In System Modeling and Optimization. CSMO 2013. IFIP Advances in Information and Communication Technology, vol. 443; Pötzsche, C., Heuberger, C., Kaltenbacher, B., Rendl, F., Eds.; Springer: Berlin, Heidelberg, Germany, 2014; pp. 36–51. [Google Scholar]
- Turova, V.; Kovtanyuk, A.; Pykhteev, O.; Sidorenko, I.; Lampe, R. Glycocalyx sensing with a mathematical model of acoustic shear wave biosensor. Bioengineering 2022, 9, 462. [Google Scholar] [CrossRef] [PubMed]
- Genaev, M.A.; Doroshkov, A.V.; Pshenichnikova, T.A.; Kolchanov, N.I.; Afonnikov, D.A. Extraction of quantitative characteristics describing wheat leaf pubescence with a novel image-processing technique. Planta 2012, 236, 1943–1954. [Google Scholar] [CrossRef] [PubMed]
- Pomeranz, M.; Campbell, J.; Siegal-Gaskins, D.; Engelmeier, J.; Wilson, T.; Fernandez, V.; Brkljacic, J.; Grotewold, E. High-resolution computational imaging of leaf hair patterning using polarized light microscopy. Plant J. 2013, 73, 701–708. [Google Scholar] [CrossRef] [PubMed]
- Pshenichnikova, T.A.; Doroshkov, A.V.; Osipova, S.V.; Permyakov, A.V.; Permyakova, M.D.; Efimov, V.M.; Afonnikov, D.A. Quantitative characteristics of pubescence in wheat (Triticum aestivum L.) are associated with photosynthetic parameters under conditions of normal and limited water supply. Planta 2019, 249, 839–847. [Google Scholar] [CrossRef] [PubMed]
- Koch, K.; Bhushan, B.; Barthlott, W. Multifunctional plant surfaces and smart materials. In Springer Handbook of Nanotechnology, Part F: Biomimetics; Bhushan, B., Ed.; Springer: Berlin, Heidelberg, Germany, 2010; pp. 1399–1436. [Google Scholar]
- Bhushan, B.; Jung, Y.C.; Nosonovsky, M. Lotus effect: surfaces with roughness-induced superhydrophobicity, self-cleaning and low adhesion. In Springer Handbook of Nanotechnology, Part F: Biomimetics; Bhushan, B., Ed.; Springer: Berlin, Heidelberg, Germany, 2010; pp. 1437–1524. [Google Scholar]
- Sazhenkov, S.A.; Sazhenkova, E.V. Homogenization of a submerged two-level bristle structure for modeling in biotechnology. Sib. Élektron. Mat. Izv. 2020, 17, 1359–1450. [Google Scholar] [CrossRef]
- Temam, R.; Miranville, A. Mathematical Modeling in Continuum Mechanics, Cambridge University Press: Cambridge, UK, 2005.
- Germain, P. Cours de Mécanique des Milieux Continus, tome 1: Théorie générale, Masson et Cie: Paris, France, 1973.
- Oleinik, O.A.; Shamaev, A.S.; Yosifian, G.A. Mathematical Problems in Elasticity and Homogenization, North-Holland: Amsterdam, Netherlands, 1992.
- Meirmanov, A.M.; Sazhenkov, S.A. Generalized solutions to linearized equations of thermoelastic solid viscous thermofluid. Electron. J. Diff. Equ. 2007, 2007, 41. [Google Scholar]
- Allaire, G.; Briane, M. Multiscale convergence and reiterated homogenization. Proc. R. Soc. Edinb. 1996, 126A, 298–341. [Google Scholar]
- Lukkassen, D.; Nguetseng, G.; Wall, P. Two-scale convergence. Int. J. Pure Appl. Math. 2002, 2, 35–86. [Google Scholar]
- Cioranescu, D.; Donato, P. An Introduction to Homogenization, Oxford University Press: Oxford, UK, 1999.
- Sanchez-Palencia, E. Non-homogeneous media and vibration theory, Lecture Notes in Physics, vol. 127, Springer: Berlin, Germany, 1980.
- Hornung, U.; Jäger, W. Diffusion, convection, adsorption and reaction of chemicals in porous media. J. Diff. Equat. 1991, 92, 199–225. [Google Scholar] [CrossRef]
- Allaire, G.; Damlamian, A.; Hornung, U. Two-scale convergence on periodic surfaces and applications. In Proceedings of the International Conference on Mathematical Modelling of Flow through Porous Media (May 1995); Bourgeat, A., Carasso, C., Luckhaus, S., Mikelić, A., Eds.; World Scientific Publishing Co.: Singapore, 1996; pp. 15–25. [Google Scholar]
Figure 1.
Mesoscopic pattern cell
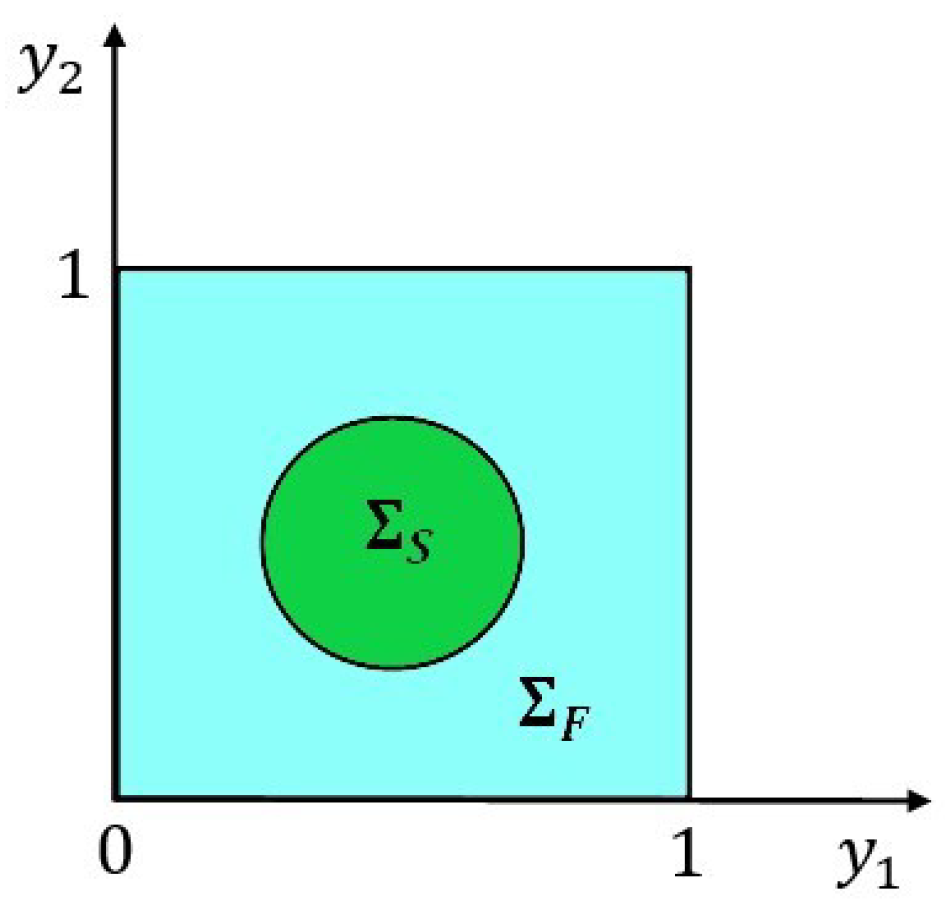
Figure 2.
Microscopic pattern cell
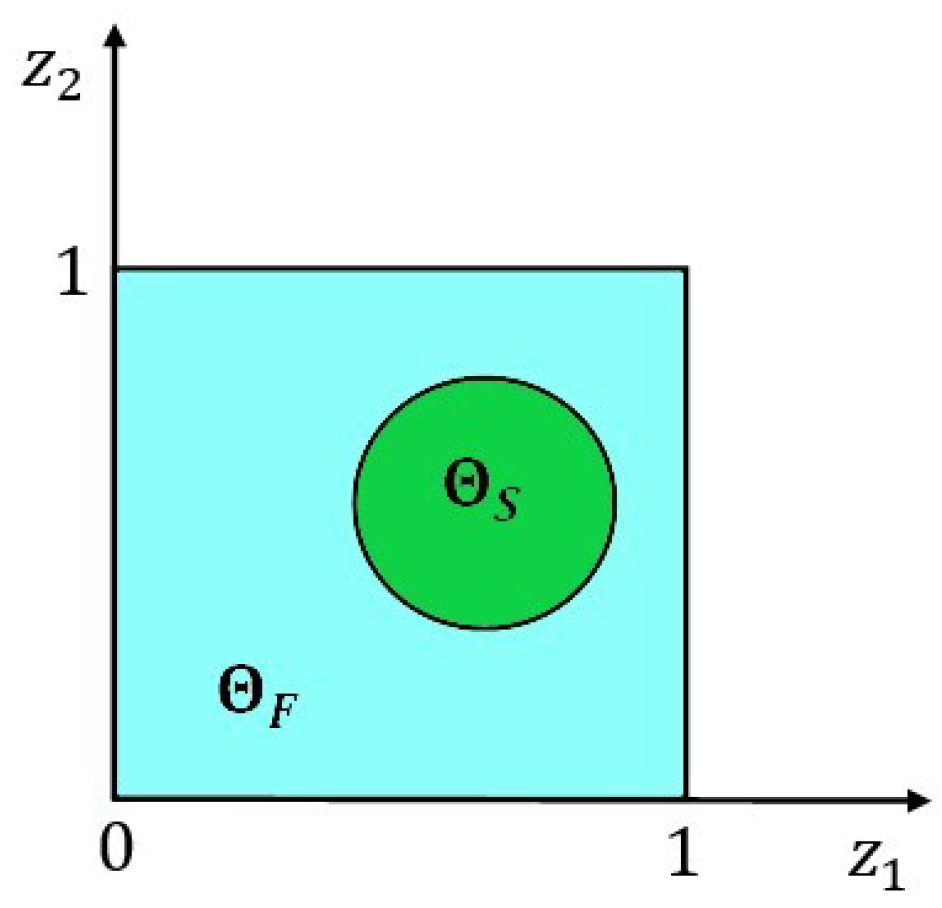
Figure 3.
Plate with the bristles and the fluid flow
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



