
Submitted:
09 August 2024
Posted:
12 August 2024
You are already at the latest version
Abstract
In the last decade, the integration of robots into agricultural tasks has significantly transformed food production from planting to harvest. The precision and efficiency of a robot allow for specialized crop management in cases such as; plant disease identification, optimization of water and fertilizer use, monitoring of environmental and soil conditions, among others. That is, the adoption of robots in agricultural practices through intelligent automation increases crop yields and decreases environmental impact. Intelligent automation faces contemporary challenges such as climate change and population growth, promoting sustainable food security. Therefore, this article presents a review of the state of the art of modular robots and their applications in agriculture. Modular robots have the ability to reconfigure and adapt to different tasks, promoting versatile solutions for the agricultural sector. These solutions are linked to the robot's control systems, which can be centralized, decentralized, and hybrid. Firstly, centralized control allows for unified management and coordination in high-precision tasks. Secondly, the decentralized approach offers flexibility and robustness in changing environments where adaptability is required. Thirdly, hybrids incorporate features of both control types balancing control and autonomy to increase efficiency and effectiveness in practical applications. In some cases, control systems incorporate bio-inspired motion control techniques, where the robot mimics natural movements and behaviors to improve its adaptability in performing a task. For example, the chemosynthesis model, which is a biological process where bacteria convert an inorganic compound into energy, has been adapted for individual robots to explore and navigate their environment. Therefore, this article presents an overview of modular robots, the incorporation of bio-inspired motion control techniques, and their convergence towards the sustainable solution of contemporary problems in the agro-industry.
Keywords:
agricultural robotics
; intelligent automation
; modular robots
; control systems
; bio-inspired motion control
1. Introduction
The world population increase, projected to reach 11.2 billion by the year 2100 [3], poses significant challenges in agricultural resource management and food production. According to United Nations data, the proportion of the population residing in urban areas has risen from 52.5% in 2012 to 56.9% in 2022. This trend towards urbanization is more pronounced in developed countries, where it is estimated that 79.7% of the population lives in urban areas, in contrast to 52.3% in developing countries. On the other hand, in the least developed countries, the urban population constitutes only 35.8% of the total [4].
Urbanization has made the population predominantly urban since 2017, and this behavior is expected to continue over the coming decades. In this context, the challenges of this era include urban sustainability, agricultural resource management, and food production [4]. Likewise, the development of sustainable agricultural systems, which not only meet food demand but also adapt to the reduction of rural spaces and increase in urban areas. From this perspective, robotics helps to address these challenges, as automation and the use of robots in agriculture compensate for labor shortages and optimize agricultural production efficiency.
Robotics is a branch of engineering that involves the design, manufacture, and operation of robots, which could be defined as an advanced tool for enhancing human capabilities [5]. In this scenario, agricultural robots equipped with sensors and artificial intelligence systems perform tasks such as; optimizing the use of water and fertilizers, carrying out planting activities, and/or taking care of crops and harvesting. For example, artificial vision systems used to identify and harvest ripe peppers [6].
Agrotechnology is a term that integrates robotics and/or automation with agriculture, aiming to transform, totally or partially, practices adopted in some stages of agricultural production. Specifically, autonomous vehicles or systems used in planting, which adapt to the varying environmental conditions ensuring constant seed spacing and planting depth, maximize crop yield through controlled plant development [7]. This approach has enabled the incorporation of multi-robot systems, or swarms of robots to perform tasks simultaneously in different parts of the field, increasing coverage efficiently. For example, swarms of drones used for monitoring or spraying crops [8,9].
In the category of multi-robot systems, there are modular robots characterized by their ability to reconfigure and adapt to different tasks and environments. This means that a single robotic system can perform various functions, changing its structure or modules according to each specific case [1]. Although there are no specific applications for all types of modular robots in agriculture, they may be employed in tasks such as; pesticide spraying or data collection, as needed at the time. This ability to adapt and reconfigure not only improves efficiency but also reduces the need for multiple specialized machines, which can be a significant saving in terms of costs and space.
Modular robots, equipped with specialized control systems and techniques, differ from conventional algorithms in their configuration. In some cases, these robots implement biologically inspired control techniques, mimicking behaviors observed in nature [10]. In agriculture, their applications are diverse, as presented in this article, which is organized as follows: the first section describes the methodology used for the literature review. The second section addresses the development of agricultural robots, from a general perspective to the implementation of multi-robot systems. Finally, the conclusions offer an overview of the topic and explore the role of modular robots in addressing the agricultural challenges of the modern era.
2. Methodology
The topic encompasses various fronts, which are presented in the following sections. However, for each general theme, different search equations were used to capture as much relevant information as possible. Initially, the research focuses on aspects related to agriculture and automation methods. Then, the topics focus on issues related to multi-robot systems and control strategies. Finally, the search delves into a specialized approach oriented towards modular robots, multicellular robots, and the phenomenon of bacterial quorum sensing, as shown below. From a total of 120 sources and/or articles initially selected, 72 were chosen based on their relevance, recency, and alignment with the research objectives, ensuring a comprehensive yet focused exploration of the subject matter.
-
Agriculture and automation:
- -
- Agricultural robotics AND agriculture AND emerging technologies
- -
- Robotic systems AND crops AND environmental sustainability in agriculture
- -
- Automation technologies AND agricultural practices
- -
- Trends in modular robotics AND agriculture
-
Multi-robot systems and control forms:
- -
- Autonomous robotic systems AND precision agriculture
- -
- Synthetic biology AND modular robots AND agricultural optimization
- -
- Bio-inspired robotics AND motion control
-
Modular robots, Multicellular robots, and Bacterial Quorum Sensing:
- -
- Modular robots AND multicellular robots
- -
- Bacterial quorum sensing AND robots
- -
- Synthetic biology AND modular robots AND agricultural optimization
The databases and information sources consulted address information reported by researchers, students, and/or organizations to quantify or understand the technological trend of modular robotics. Therefore, searches were conducted on sites like IEEE Xplore, Web of Science, Scopus, Springer, and Google Scholar, as well as technical reports, conference papers, and relevant theses to obtain a comprehensive view of the current state and future trends in modular robotics applied to agriculture. However, this review focuses on identifying and analyzing recent developments and potential applications of modular robots in agriculture. Nevertheless, this review had certain limitations, given the rapid evolution of robotics may mean that some very recent developments are not included, as shown in Figure 1.
3. Robots and Agriculture
Agriculture is one of the sectors transformed by leveraging the versatility of robotics [11]. However, robots are classified in various ways, taking into account aspects such as their functionality, control techniques, type of actuators, among other characteristics. In this context, there are two main types of robotic systems: individual robotic systems and multi-robot systems [12].
On one hand, an individual robotic system refers to a robot designed to carry out tasks autonomously. This type of robot is equipped with sensors, communication systems, and control mechanisms, enabling it to perform tasks such as; preparing the land, plant treatment, sowing, collecting agronomic data, and harvesting [11]. On the other hand, a multi-robot system is a set of robots working simultaneously on one or several tasks within the same agricultural ecosystem. These robots are designed to share information, make decisions based on collectively gathered data, and cover large areas of land.
The choice between one system or another depends on various factors, such as; the size and type of crop, the tasks to be performed, and the cost. Although individual systems are efficient for performing specialized tasks, multi-robot systems are more flexible and are used in large-scale tasks. Therefore, this classification is presented in a general way in Table 1 and is explained during the development of this section.
3.1. Individual Robotic System
Individual agricultural robots are designed with various types of sensors, actuators, and communication systems to increase the farmer’s productivity in performing a task. Firstly, they are equipped with imaging, environmental, or soil sensors to analyze, visualize, or collect environmental data from the surroundings, supporting tasks like planting, fertilization, or pest control [15]. Secondly, these robots can have locomotion systems such as wheels, tracks, propellers, or legs to move from one place to another. Thirdly, the communication systems implement wireless technologies such as Wi-Fi, Bluetooth, LoRaWAN, NB-IoT, or GSM, facilitating their integration into smart agricultural systems or allowing their operation remotely [16,17].
Another characteristic of these robots is that they vary in size and design, from small autonomous devices to large and complex systems. Small robots are typically used for simple tasks like weeding or crop monitoring, as they can quickly move between crop rows. In contrast, larger robots are mostly used for planting, fertilization, and harvesting, as they cover extensive land areas and perform demanding tasks [18,19]. Various examples are provided below to describe the basic functionality of this type of robot, and an overview is presented in Table 2 and Table 3, which outlines their basic characteristics, advantages, and disadvantages.
- CropScout (Figure 2) is a robot designed for crop inspection and analysis, equipped with multispectral cameras and temperature and humidity sensors to monitor crop health and growth. Moreover, this robot implements Wi-Fi technology to transmit data in real-time to a database, where it is analyzed to provide insights about the crop condition. CropScout is capable of autonomously navigating through fields, using wheels designed to adapt to various types of agricultural terrain [20].
- WeedBot (Figure 2) is a robot that uses cameras and computer vision sensors to identify weeds among the crops and mechanically remove them without using herbicides. Additionally, this robot communicates via Wi-Fi to receive updates and send information to operators, and its compact design allows it to maneuver easily between the crops [21].
- GrapeBot (Figure 2) is a robot designed for viticulture, equipped with specialized sensors to measure the maturity and environmental conditions of grapes, and then harvest them. This robot communicates with the operator via Wi-Fi, is capable of making autonomous decisions based on the collected data, and its modular design allows it to adapt to different grape varieties and cultivation techniques [22].

Table 2.
Comparison of individual robotic systems with agricultural applications (part 1).
| Name | Application | Loco-motion | Functional advantages | User interface | Year | |
|---|---|---|---|---|---|---|
| Land Preparation | John deere autonomous tractor   [23] [23] |
Commercial | 4WD | - High traction on rough terrains. - Reduces operator fatigue. | Cabin control panel, mobile app | 2022 |
Kubota X Tractor  [24] [24] |
Commercial | 4WS | - High-efficiency electric vehicle. - Reduces environmental impact and saves energy. | Mobile app, touch control panel | 2020 | |
| Agrobot SW6010 [25] |
Commercial | 2WS | - Stability on uneven terrains. - Minimizes soil compaction. | Remote control, mobile app | 2019 | |
| SoilAnalyzer [26] |
Research | 4WD | - Adaptable to various soil types. - Analyzes soil composition. | Mobile app, web interface | 2021 | |
| Land Preparation | John Deere Autonomous Tractor [23] |
Commercial | 4WD | High traction on difficult terrains. Reduces operator fatigue. | Cabin control panel, mobile app | 2022 |
| Kubota X Tractor [24] |
Commercial | 4WS | High-efficiency electric vehicle. Reduces environmental impact and saves energy. | Mobile app, touch control panel | 2020 | |
| Agrobot SW6010 [25] |
Commercial | 2WS 1WD | Stability on uneven terrain. Minimizes soil compaction. | Remote control, mobile app | 2019 | |
| SoilAnalyzer [26] |
Research | 4WD | Adapts to various soil types. Analyzes soil composition. | Mobile app, web interface | 2021 | |
| Plant Treatment | Ecorobotix ARA [27] |
Commercial | 4WD | Uses solar energy for mobility. Reduces the use of chemicals or fertilizers. | Mobile app, touch control panel | 2021 |
| Dino [28] |
Commercial | 4WS | Maneuverability in tight spaces. Controlled weeding in vegetable crops. | Cabin control panel, mobile app | 2019 | |
DJI Agras T20  [29] [29] |
Commercial | UAV | Aerial access for precise spraying. Improves spraying efficiency. | Remote control, mobile app | 2024 | |
| PlantHealth [30] |
Research | 4WS | Precision in soil treatment application. Diagnosis and treatment of plant diseases. | Mobile app, web interface | 2022 |
Table 3.
Comparison of individual robotic systems with agricultural applications (part 2).
| Name | Application | Loco-motion | Functional advantages | User interface | Year | |
|---|---|---|---|---|---|---|
| Sowing | Rowbot [31] |
Commercial | 4WD | Quickly fertilizes row crops. Reduces excessive seed expenditure. | Mobile app, web interface | 2022 |
| AgriBots [32] |
Research | 4WD | Precision and reduction in seeding waste. | Control panel, mobile app | 2022 | |
FarmBot Genesis  [33] [33] |
Commercial | Robotic arm | Customization for home gardening. Automation in small gardens. | Web app, remote control | 2020 | |
| SeedMaster [34] |
Research | 4WD | Precision seeding efficiency. Reduces variability in seeding. | Mobile app, web interface | 2021 | |
| PlantingDrone [35] |
Research | UAV | Aerial seeding in inaccessible terrains. Expands the reach of seeding. | Remote control, mobile app | 2022 | |
| Harvesting | Harvest CROO Robotics [36] |
Commercial | 4WD | Increases productivity in harvesting. | Cabin control panel, mobile app | 2023 |
| Abundant Robotics [37] |
Commercial | 4WD | Automated apple harvesting. | User interface with panel | 2022 | |
| AppleHarvester AI [38] |
Research | 4WD | AI-based smart harvesting. Reduces damage and improves fruit selection. | Control panel, mobile app | 2022 | |
| TerraSentia [39] |
Research | 4WD | Mobility in high-density crops. Detailed monitoring and crop performance improvement. | Mobile app, web interface | 2019 | |
| SoilScan AI [40] |
Research | UAV | Real-time soil analysis. Soil fertility optimization and nutrient detection. | Mobile app, web interface | 2022 |
3.2. Multi-Robot Systems
Individual robotic systems marked the beginning of a transformation in the agricultural sector, highlighting their ability to perform tasks such as planting, irrigation, or harvesting, reducing the dependency on manual labor. However, some of these systems transitioned towards multi-robot systems. This transition is characterized by the coordinated collaboration between multiple robots, working together as a synchronized fleet to amplify the individual capabilities of each robot.
For example, SwarmFarm Robotics are modular robots capable of performing planting, spraying, and weeding in controlled conditions. These robots have a modular design that allows them to be reconfigured to perform various tasks. Similarly, fleets of DJI Agricultural Drones (model DJI Agras MG-1) perform tasks of spraying and aerial monitoring. These drones quickly fumigate large tracts of land to improve crop yields by eliminating pests [29,41].
Other examples of multi-robot systems like AgEagle Aerial Systems and Harvest Automation HV-100 leverage the specialization of each robot to solve tasks collectively. AgEagle drones carry out aerial mapping and spraying, while Harvest Automation HV-100 robots focus on greenhouse logistics. Each of these robotic systems redefines agricultural practices, as summarized with some examples in Table 4 shown below.
3.3. Modular Robots
Within the realm of multi-robot systems, modular robots (Figure 3) stand out as articulated systems composed of blocks, standardized components, or modules. Unlike the previously discussed robots, these modules allow the robot to reconfigure itself to construct different morphologies, thus solving various types of tasks. These morphologies can be defined or arbitrary. On one hand, the assembly of the modules is done in an orderly and specific manner. On the other hand, the modules have various connection forms and can form different types of structures [45,46].
The modules of a modular robot can be reconfigured either manually or with user assistance or automatically, where the robot autonomously manages its individual modules. Module management is carried out through controllers that can be centralized, where a single controller available in a module or external device coordinates the robot’s movements; decentralized, two or more modules control the robot; or hybrid, combining centralized coordination with decentralized autonomy. However, since the modules of a modular robot are interchangeable, decentralized control systems reduce the unit cost of each module through mass production [47,48].
Control defines the intelligence of each module based on its ability to interact with the environment; therefore, some authors incorporate local sensors and actuators in each module to respond effectively to external stimuli such as heat, light, electricity, moisture, among others. This indicates that the design of the modules must consider at least three (3) stages: definition of the architecture to determine functional modules and feasible assemblies between modules; orientation of system configuration tasks to optimize module assembly; and the form of control to coordinate and control the movements of the formed robotic structure. Among these, the architecture allows for the classification of modular robots into three (3) categories: chain, lattice, or hybrids. On one hand, chain-type modular robots are assemblies of modules connected in sequence whose configurations form kinematic chains in two (2D) or three (3D) dimensions. On the other hand, lattice-type modular robots form geometric structures similar to a prism, and hybrids integrate elements of both chain and lattice robots, allowing their modules to group forming linear chains or adopt regular geometric arrangements in their structure [47,49].
The mechanisms used by modules to couple are crucial as they enable system reconfiguration and transmit mechanical force, energy, heat, or data. However, the shape of the module faces dictates the movement and load capacity of the assembled robot. These faces can have connectors or forms of connectors, such as male, female, hermaphroditic, or gender-neutral. Male and female connectors have shapes that fit together mechanically or electromechanically. Hermaphroditic connectors have both male and female elements on each face, allowing them to adopt a module in any position, while gender-neutral connectors are usually electromagnetic and do not require mechanical coupling [46,50].
A specific example of a chain-type modular robot is the EMeRGE modular robot, which has four faces; three of them are female connectors, and one is male. Magnets on the faces allow its modules to be quickly coupled Figure 4. Then, there is the lattice-type modular robot Odin, characterized by a hierarchical structure of modules based on specific functionality. Lower-level modules act as joints, focusing on information transmission, while higher-tier modules provide structural support and facilitate movement. Odin’s modular architecture allows adaptive reconfiguration, deforming to fit different environments without altering its general configuration Figure 4. Additionally, there is the HyMod hybrid modular robot, which has modules with three degrees of freedom and hermaphroditic connectors to form arbitrary structures and manipulate objects with tools activated by the user from an application Figure 4.
While most studies consider the load capacity of the mechanism in the design process, it is not a representative factor for determining whether they can create reliable connections in module assemblies. The limited load capacity and the nature of the movements imply that many of these robots are in preliminary development stages and do not have a defined commercial application. Each connection mechanism has its advantages and disadvantages, as connectors allow for quick coupling and uncoupling of modules to perform self-repair tasks, enabling the robot to replace faulty modules with functional ones while performing a task. In other words, self-repair is a specific case of self-reconfiguration [54,55].
For example, in the application by Wu et al. [56], faulty modules can be ejected from the initial configuration and replaced with spare modules. They developed a gradient-based self-repair method, in which some modules identify and replace the faulty modules without needing to eject them. This approach allowed for faster and more energy-efficient repairs, as it minimizes the number of movements required for reconfiguration and repair. However, Wu’s method was validated only in simulations and requires further research for real hardware implementation.
Another aspect of modular robotics is the study of the enumeration of modules in the robot’s configuration, but this does not provide information about performance in specific tasks [57]. However, artificial evolution is proposed as an approach to discover suitable combinations of morphologies and controllers. Luo et al. and Shin et al. explored the idea of evolving morphologies and controllers simultaneously to create virtual creatures, although their physical construction was challenging. Similar techniques are applied to modular robots, with the advantage that these robots can be easily assembled from modules, allowing simpler adaptation to various applications and tasks [58,59].
This implies that the design of the controllers for the robots must be sophisticated, and the techniques implemented for controlling them even more so. Therefore, this article will describe the controllers used in this type of robot and their information transmission methods in the following sections.
3.4. Control Systems
Control mechanisms in modular robots range from centralized controllers to bio-inspired ones. Each control approach has unique characteristics and adaptability versions according to the robot implementing it. Firstly, centralized control is characterized by a single central system or controller that makes decisions and coordinates all the actions of the robot’s modules. Despite its efficiency in coordination and decision-making process simplification, the vulnerability of the central controller to failures can paralyze the entire robot’s operation [1,10,60].
In contrast, distributed control assigns each robot module its own local controller, allowing it to make decisions independently. Coordination between modules is achieved through communication, creating a robust and fault-tolerant system. This structure has certain advantages in changing or unpredictable environments, where the ability to adapt and recover from failures is embedded in the robot [61].
For example, the M-TRAN (Modular Transformer) robot is a modular robotic system based on a lattice structure that can modify its morphology. This robot incorporates distributed control, which enabled the modeling of self-reconfiguration experiments with up to 24 modules, managed by both centralized and decentralized control. The scalability and homogeneity of the system were maintained in all experiments, demonstrating the effectiveness of distributed control in modular robotic systems [62].
This distributed control approach indicates that each module can function independently while retaining the capability to coordinate complex actions with other modules. This module-level autonomy enhances the system’s overall robustness and fault tolerance, as the failure of one module does not incapacitate the entire robot. Furthermore, distributed control facilitates adaptability and real-time reconfiguration, allowing adaptation to dynamic and unpredictable environments [63].
Other control forms, such as bio-inspired or autonomous, are based on principles and strategies to enhance the operability of modular robots. Bio-inspired control leverages algorithms and principles based on the behavior of living organisms, allowing robots to modify their behavior in response to environmental changes, by emulating biological processes to increase their efficiency and effectiveness. On the other hand, autonomous control provides these robots with the ability to operate independently, without human intervention, using sensors and algorithms for decision-making, thus navigating and executing tasks in various environments. Furthermore, remote control or teleoperation, along with mixed control, offer alternatives that allow direct human intervention from a distance in hazardous environments or the combination of multiple control systems to achieve a balance between efficacy, adaptability, and robustness, tailored to the specific needs of each application [63,64].
For example, ATRON uses a distributed control that incorporates Artificial Neural Networks (ANN) to decide when to emerge, stop, and calculate the fitness value in self-reconfiguration and self-repair processes, using genetic algorithms to optimize the ANN weights. This approach shows a combination of bio-inspired and autonomous control, as ATRON modules are capable of making decisions locally and coordinating their movements without direct human intervention [65]. Another example is the Molecubes robot, which uses a bio-inspired and autonomous approach, implementing a genetic algorithm to evolve the control of the robot’s modular neural network in simulation, aiming to generate specific behaviors or movements [66].
As observed, the choice of control system depends on the specific application and the environment in which the robot will operate. For instance, a centralized control system might be preferable in controlled settings where experimental testing is conducted, while distributed control offers advantages in terms of robustness and fault tolerance for operations in unpredictable or hazardous environments.
3.5. Multicellular Robots
Control system models represent this type of robot as multicellular robots, which mimic the organization and functioning of living organisms. Just as cells in an organism specialize and work together to achieve complex goals, multicellular robots use control systems, such as distributed or bio-inspired, to self-organize, adapt, and navigate through changing environments [50,51,66].
This biology-robotics connection reflects a paradigm where engineering meets biology. For instance, the biological systems studied by Satoshi et al. represent an innovative advancement in synthetic biology, where through the use of cellular signaling with the synNotch platform, researchers managed to program cells to induce specific morphological changes and spatial organization [67,68].
This work highlights the ability of biological systems to self-organize into complex multicellular structures through cellular interactions. Cells can communicate with each other and change their behavior in response to specific signals, similar to robots using control systems to adapt to their environment. These artificial genetic programs lead to the formation of cellular assemblies with characteristics of natural developmental systems, such as robust self-organization, choreographed sequential assembly, divergence of cell types, symmetry breaking, and the ability to regenerate after injury [69].
Similarly, Ghasem et al. and Banzhaf et al. describe how Quorum Sensing (QS) facilitates communication and coordination among bacteria using signaling molecules called autoinducers (AIs). This process allows bacteria to detect population density and collectively regulate their gene expression, which is crucial for a variety of bacterial behaviors, such as biofilm formation and virulence. QS systems can be genetically reconfigured to develop new functions in biotechnology and medicine, such as biosensors and bacteria-based therapies [70,71].
In parallel, the concepts of Quorum Sensing (QS) and unicellular organisms are studied in robotics, where control and communication systems among modules determine the collective behavior of a system. Similar to QS, multicellular robots use signals to coordinate among themselves, adjusting their behavior based on the perception of the environment and the density of the robotic population. This process allows for self-organization and adaptability in complex tasks, reflecting how living organisms, like bacteria, communicate and coordinate for collective functions [69,70].
More specifically, multicellular robots are modular robotic systems composed of multiple autonomous units that interact with each other to achieve common goals. These units, often referred to as modules or robotic cells, can have the ability to self-organize, adapt, and work together similarly to how biological cells form tissues, organs, and entire organisms. Some key concepts to study in this type of robot are [47]:
- Modularity: Multicellular systems are characterized by their modular structure, where each module can perform specific functions.
- Self-organization: The ability of multicellular robots to form complex structures or behavior patterns without centralized direction, similar to biological processes like embryonic development or tissue formation.
- Adaptability: These robots can adapt to changes in the environment or in the task being performed, autonomously adjusting their configuration or behavior.
- Communication: Interaction among robotic cells often involves some form of communication, whether through direct physical connections or via wireless signals, allowing coordination and cooperation between modules.
Specific examples of this type of robot include RoboBees, swarm robots, and robots inspired by marine organisms to mimic the collective intelligence observed in nature. RoboBees are small flying robots that work in swarms to perform tasks like crop pollination or search and rescue in hard-to-reach areas. Swarm robots, composed of numerous small units, coordinate with each other to create structures or patterns, enabling them to explore environments or transport objects [72]. Additionally, there are robots designed after marine organisms that simulate the collective behavior of schools of fish or jellyfish colonies, with the goal of monitoring the marine environment or responding to oil spills. Finally, Table 5 presents a compilation of different types of modular robots and their applications.
Conclusions
Quorum sensing (QS) communication in bacteria, which allows for complex coordination and adaptation within microbial communities, provides an analogy for modular robotics. Just as bacteria use QS to synchronize collective actions, modular robots could employ similar signals to coordinate their movements and tasks, adapting to changes in the environment or to the density of the robot population. This approach would allow modular robotic systems to exhibit collective behavior, enhancing efficiency and adaptability in performing various tasks.
In agriculture, modular robots can utilize QS principles to optimize irrigation, fertilization, and harvesting. These robots could communicate among themselves to efficiently distribute tasks, identify areas requiring attention, and adapt their actions in real time to changing conditions, such as weather or plant growth. The ability to self-organize and respond as a collective could revolutionize precision agriculture, making crop management sustainable and productive.
Furthermore, implementing QS strategies in modular robotics could facilitate monitoring and responding to environmental issues, such as early detection of plant diseases or soil imbalances. Robots equipped with sensors and QS algorithms could patrol fields, communicate findings, and autonomously take corrective actions, thus minimizing the need for human intervention and optimizing resource use.
Inspiration from QS could also lead to the creation of modular robots capable of constructing or repairing agricultural structures, such as irrigation systems or crop protection barriers. By working together, these robots could adjust their construction or repair strategy based on detected needs, similar to how bacterial communities build protective biofilms.
References
- Seo, J.; Paik, J.; Yim, M. Modular Reconfigurable Robotics. The Annual Review of Control, Robotics, and Annu. Rev. Control Robot. Auton. Syst 2019, 2, 63–88. [CrossRef]
- Pavlic, T.P.; Hanson, J.; Valentini, G.; Walker, S.I.; Pratt, S.C. Quorum sensing without deliberation: biological inspiration for externalizing computation to physical spaces in multi-robot systems. Swarm Intelligence 2021, 15, 171–203. [CrossRef]
- Nations, U. World population projected to reach 9.8 billion in 2050, and 11.2 billion in 2100 | UN DESA | United Nations Department of Economic and Social Affairs.
- Nations, U. World Population Prospects 2022 World Population Prospects 2022 Summary of Results.
- Considine, D.M.; Considine, G.D., Robot Technology Fundamentals. In Standard Handbook of Industrial Automation; Considine, D.M.; Considine, G.D., Eds.; Springer US: Boston, MA, 1986; pp. 262–320. [CrossRef]
- Azimi, S.; Abidin, M.S.Z.; Emmanuel, A.A.; Hasan, H.S.; Mahmud, M.S.A.; Emmanuel, A.A. Robotics and Automation in Agriculture: Present and Future Applications APPLICATIONS OF MODELLING AND SIMULATION Robotics and Automation in Agriculture: Present and Future Applications, 2020.
- Zhang, L.; Zhang, H.; Niu, Y.; Han, W. Mapping maizewater stress based on UAV multispectral remote sensing. Remote Sensing 2019, 11. [CrossRef]
- Hafeez, A.; Husain, M.A.; Singh, S.P.; Chauhan, A.; Khan, M.T.; Kumar, N.; Chauhan, A.; Soni, S.K. Implementation of drone technology for farm monitoring & pesticide spraying: A review, 2023. [CrossRef]
- Boehlje, M.; Langemeier, M. Automation and Robotics in Production Agriculture, 2022.
- Zhang, C.; Zhu, P.; Lin, Y.; Jiao, Z.; Zou, J. Modular Soft Robotics: Modular Units, Connection Mechanisms, and Applications. Advanced Intelligent Systems 2020, 2. [CrossRef]
- Oliveira, L.F.; Moreira, A.P.; Silva, M.F. Advances in agriculture robotics: A state-of-the-art review and challenges ahead, 2021. [CrossRef]
- Dorigo, M.; Theraulaz, G.; Trianni, V. Swarm Robotics: Past, Present, and Future [Point of View]. Proceedings of the IEEE 2021, 109, 1152–1165. [CrossRef]
- Fernandes, H.R.; Polania, E.C.M.; Garcia, A.P.; Mendonza, O.B.; Albiero, D. Agricultural unmanned ground vehicles: A review from the stability point of view. Revista Ciência Agronômica 2020, 51, e20207761. [CrossRef]
- Chitre, N.; Dogra, A.; Singla, E. Optimal synthesis of reconfigurable manipulators for robotic assistance in vertical farming. Robotica 2023, 41, 2283 â 2297. Cited by: 1, . [CrossRef]
- Cristóvão, M.P.; Portugal, D.; Carvalho , A.E.; Ferreira , J.F. A LiDAR-Camera-Inertial-GNSS Apparatus for 3D Multimodal Dataset Collection in Woodland Scenarios. Sensors 2023, 23. Cited by: 1; All Open Access, Gold Open Access, Green Open Access, . [CrossRef]
- Dyshekov, A.; Mirzaev, M.; Pavlov, D.; Smirnov, I. Design of an autonomous self-propelled platform for performing agricultural tasks. 2023, Vol. 2697. Cited by: 0; All Open Access, Bronze Open Access, . [CrossRef]
- Pincheira, M.; Shamsfakhr, F.; Hueller, J.; Vecchio, M. Overcoming Limitations of IoT Installations: Active Sensing UGV for Agricultural Digital Twins. 2023, p. 319 â 324. [CrossRef]
- Joseph, D.M.; Santhosh, S.; Yesudas, K.; Sojan, A.; Mahanta, G.B. A preliminary study on design of a modular agricultural mobile robot. 2022, Vol. 2670. Cited by: 0; All Open Access, Bronze Open Access, . [CrossRef]
- Zhang, A.; Pan, Y.; Zhang, C.; Wang, J.; Chen, G.; Shang, H. Design and Implementation of a Novel Agricultural Robot with Multi-Modal Kinematics. Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics) 2023, 14272 LNAI, 395 â 406. Cited by: 0, . [CrossRef]
- Design, Y. AI-POWERED CROP SCOUTING ROBOT PROMISES BETTER YIELDS WITH SENSIBLE FARMING, 2023.
- Tran, D.; Schouteten, J.J.; Degieter, M.; Krupanek, J.; Jarosz, W.; Areta, A.; Emmi, L.; Steur, H.D.; Gellynck, X. European stakeholdersâ perspectives on implementation potential of precision weed control: the case of autonomous vehicles with laser treatment. Precision Agriculture 2023, 24, 2200–2222. [CrossRef]
- Peng, C.; Vougioukas, S.; Slaughter, D.; Fei, Z.; Arikapudi, R. A strawberry harvest-aiding system with crop-transport collaborative robots: Design, development, and field evaluation. Journal of Field Robotics 2022, 39, 1231–1257, [https://onlinelibrary.wiley.com/doi/pdf/10.1002/rob.22106]. [CrossRef]
- US, J.D. Autonomous Tractor | John Deere US, 2024.
- KUBOTA. Kubota Concept Tractor | Innovation | Kubota Global Site, 2024.
- AGROBOT. The first pre-commercial robotic harvesters for gently harvest strawberries., 2024.
- Rao, V.R.; Krishna, G.B. Soil sampler robot with localization for agro purposes.
- ARA, E. ARA is a high-precision sprayer developed by Ecorobotix, 2024.
- Technologies, N. Dino has completed its transformation into Orio, 2024.
- DJI. DJI AGRASMG-1, 2024.
- Rizk, H.; Habib, M.K. Robotized Early Plant Health Monitoring System. In Proceedings of the IECON 2018 - 44th Annual Conference of the IEEE Industrial Electronics Society, 2018, pp. 3795–3800. [CrossRef]
- Mansur, H.; Flippo, D.; Sharda, A.; Schmitz, A.; Badgujar, C.; McCornack, B. Design of a Reconfigurable Crop Scouting Vehicle for Row Crop Navigation: A Proof-of-Concept Study. Sensors 2022, 22. [CrossRef]
- Adetunji, C.O.; Hefft, D.I.; Olugbemi, O.T. Chapter 17 - Agribots: A gateway to the next revolution in agriculture. In AI, Edge and IoT-based Smart Agriculture; Abraham, A.; Dash, S.; Rodrigues, J.J.; Acharya, B.; Pani, S.K., Eds.; Intelligent Data-Centric Systems, Academic Press, 2022; pp. 301–311. [CrossRef]
- Montagnino, F.M., Beyond the âGreat Derangementâ: Will the Humanities Lead Ecological Transition?; 2020; pp. 111–142. [CrossRef]
- SeedMaster. REVOLUTIONARY ULTRA SR THE MOST ADVANCED LARGE-SCALE AIR SEEDER, 2024.
- Mohan, M.; Richardson, G.; Gopan, G.; Aghai, M.M.; Bajaj, S.; Galgamuwa, G.A.; Vastaranta, M.; Arachchige, P.S.; Amorós, L.; Corte, A.P.D.; et al. Uavâsupported forest regeneration: Current trends, challenges and implications, 2021. [CrossRef]
- Karkee, M.; Silwal, A., Robotic Fruit Harvesting. In Encyclopedia of Smart Agriculture Technologies; Zhang, Q., Ed.; Springer International Publishing: Cham, 2022; pp. 1–16. [CrossRef]
- Li, Z.; Yuan, X.; Wang, C. A review on structural development and recognitionâlocalization methods for end-effector of fruitâvegetable picking robots. International Journal of Advanced Robotic Systems 2022, 19, 17298806221104906. [CrossRef]
- advancedfarm. Robotic Apple Harveste, 2024.
- Kayacan, E.; Chowdhary, G. Tracking Error Learning Control for Precise Mobile Robot Path Tracking in Outdoor Environment. Journal of Intelligent & Robotic Systems 2019, 95. [CrossRef]
- Liu, J.; Cai, H.; Chen, S.; Pi, J.; Zhao, L. A Review on Soil Nitrogen Sensing Technologies: Challenges, Progress and Perspectives. Agriculture 2023, 13, 743. [CrossRef]
- Swarfarmrobotic. Swarfarmrobotic, 2019.
- Manuel, V.; Salinas, G.; Juan, .; Santiago, G.P.; Cortes, A.; Quintanar, C.T. Artà culo: COMEII-23030 VIII CONGRESO NACIONAL Y I CONGRESO INTERNACIONAL DE RIEGO, DRENAJE Y BIOSISTEMAS.
- Harvest. MOBILE ROBOTS FOR INDUSTRIAL PRODUCTIVITY, 2016.
- Henrà quez, G.F.A.; Mauricio, C.; Torres, M.; Salvador, E.; Resumen, S. Aplicaciones de los drones en la agricultura, 2017.
- Ning, L.; Limpabandhu, C.; Tse, Z.T.H. Engineering Magnetic Soft and Reconfigurable Robots. Soft Robotics 2024, 11, 2 â 20. Cited by: 0, . [CrossRef]
- Martà nez, G.J.; Adamatzky, A.; Figueroa, R.Q.; Schweikardt, E.; Zaitsev, D.A.; Zelinka, I.; Oliva-Moreno, L.N. Computing with Modular Robots. International Journal of Unconventional Computing 2022, 17, 31 â 60. Cited by: 0.
- Liu, Y.; Wei, R.; Dong, H.; Zhu, Y.; Zhao, J. A DESIGNATION of MODULAR MOBILE RECONFIGURABLE PLATFORM SYSTEM. Journal of Mechanics in Medicine and Biology 2020, 20. Cited by: 2; All Open Access, Hybrid Gold Open Access, . [CrossRef]
- Tian, X.; Zhan, Q. A Hermaphrodite Electromechanical Connector for Self-Reconfigurable Robot Modules. IEEE/ASME Transactions on Mechatronics 2021, 26, 3276 â 3281. Cited by: 2, . [CrossRef]
- Yang, H.A.; Duan, X.; Zhang, Z.Q.; Cao, S.; Zan, W.P. A matrix shape formation approach and experiment for latticed swarm robots.Kongzhi yu Juece/Control and Decision 2020, 35, 2391 â 2398. Cited by: 1, . [CrossRef]
- Freeman, C.; Maynard, M.; Vikas, V. Topology and Morphology Design of Spherically Reconfigurable Homogeneous Modular Soft Robots. Soft Robotics 2023, 10, 52 â 65. Cited by: 4, . [CrossRef]
- Moreno, R.; Faiña, A. EMERGE Modular Robot: A Tool for Fast Deployment of Evolved Robots. Frontiers in Robotics and AI 2021, 8. [CrossRef]
- Garcia, R.F.M.; Lyder, A.; Christensen, D.J.; Stoy, K. Reusable electronics and adaptable communication as implemented in the odin modular robot. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, 2009, pp. 1152–1158. [CrossRef]
- Alvarez, S.R.; Espinosa Oviedo, J.; Gil, A.A. Hymod: A Software For Hybrid Microgrid Optimal Design. In Proceedings of the 2018 15th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), 2018, pp. 1–6. [CrossRef]
- Peck, R.H.; Timmis, J.; Tyrrell, A.M. Self-Assembly and Self-Repair during Motion with Modular Robots. Electronics (Switzerland) 2022, 11. Cited by: 3; All Open Access, Gold Open Access, Green Open Access, . [CrossRef]
- Nokhanji, N.; Santoro, N. Self-Repairing Line of Metamorphic Robots. In Proceedings of the 2021 7th International Conference on Automation, Robotics and Applications (ICARA), 2021, pp. 55–59. [CrossRef]
- Wu, Q.; Liu, S.; Cao, G.; Fei, Y. Mechatronics Design of a Modular Self-Reconfigurable and Self-Repair Robot. In Proceedings of the 2007 IEEE International Conference on Control and Automation, 2007, pp. 2243–2247. [CrossRef]
- Feng, J.; Liu, J. Enumerating the Nonisomorphic Configurations of a Modular Reconfigurable Robot. Journal of Mechanisms and Robotics 2022, 14. Cited by: 1, . [CrossRef]
- Shin, S.; Kang, M.; Baek, J. Dynamic Model Learning and Control of Robot Manipulator Based on Multi-layer Perceptron Neural Network.Transactions of the Korean Society of Mechanical Engineers, A 2023, 47, 945 â 957. Cited by: 0, . [CrossRef]
- Luo, H.; Lam, T.L. Auto-Optimizing Connection Planning Method for Chain-Type Modular Self-Reconfiguration Robots. IEEE Transactions on Robotics 2023, 39, 1353 â 1372. Cited by: 0, . [CrossRef]
- Ju, C.; Son, H.I. A Hybrid Systems-Based Hierarchical Control Architecture for Heterogeneous Field Robot Teams. IEEE Transactions on Cybernetics 2023, 53, 1802 â 1815. Cited by: 5; All Open Access, Green Open Access, . [CrossRef]
- Chen, J.; Qiang, H.; Xu, G.; Liu, X.; Mo, R.; Huang, R. Extraction of navigation line based on improved grayscale factor in corn field. Ciência Rural 2020, 50, e20190699. [CrossRef]
- Kurokawa, H.; Tomita, K.; Kamimura, A.; Yoshida, E.; Kokaji, S.; Murata, S. Distributed self-reconfiguration control of modular robot M-TRAN. In Proceedings of the IEEE International Conference Mechatronics and Automation, 2005, 2005, Vol. 1, pp. 254–259 Vol. 1. [CrossRef]
- Cortez, W.S.; Verginis, C.K.; Dimarogonas, D.V. A Distributed, Event-Triggered, Adaptive Controller for Cooperative Manipulation with Rolling Contacts. IEEE Transactions on Robotics 2023, 39, 3120 â 3133. Cited by: 1; All Open Access, Green Open Access, . [CrossRef]
- Stroppa, F.; Selvaggio, M.; Agharese, N.; Luo, M.; Blumenschein, L.H.; Hawkes, E.W.; Okamura, A.M. Shared-Control Teleoperation Paradigms on a Soft-Growing Robot Manipulator. Journal of Intelligent and Robotic Systems: Theory and Applications 2023, 109. Cited by: 1; All Open Access, Green Open Access, . [CrossRef]
- Brandt, D.; Christensen, D.J.; Lund, H.H. ATRON Robots: Versatility from Self-Reconfigurable Modules. In Proceedings of the 2007 International Conference on Mechatronics and Automation, 2007, pp. 26–32. [CrossRef]
- Parada, I.; Sacristán, V.; Silveira, R.I. A new meta-module design for efficient reconfiguration of modular robots. Autonomous Robots 2021, 45, 457 â 472. Cited by: 6; All Open Access, Green Open Access, Hybrid Gold Open Access, . [CrossRef]
- Kuzuya, A.; Nomura, S.I.M.; Toyota, T.; Nakakuki, T.; Murata, S. From Molecular Robotics to Molecular Cybernetics: The First Step Toward Chemical Artificial Intelligence. IEEE Transactions on Molecular, Biological and Multi-Scale Communications 2023, 9, 354–363. [CrossRef]
- Yoo, A.; Lee, K.; Kang, B.; Kim, C.s.; Han, J.; Park, J.O.; Choi, E. Actively Controllable Stem Cell Spheroid-based Microrobot for Tissue Regeneration. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), 2018, pp. 1286–1290. [CrossRef]
- Tissera, P.S.S.; Choe, S.; Punmiya, R. Quorum Sensing-Based Nanonetwork Synchronization. IEEE Wireless Communications Letters 2019, 8, 893–896. [CrossRef]
- Khajepour, G.; Vakilzadeh, M.; Vatankhah, R. Controller design for discrete-time nonlinear feed-forward cascades with application to bacterial quorum sensing. Journal of the Franklin Institute 2023, 360, 3967 â 3988. Cited by: 0, . [CrossRef]
- Banzhaf, M.; Resendis-Antonio, O.; Zepeda-Mendoza, M.L. Uncovering the Dynamic Mechanisms of the Pseudomonas Aeruginosa Quorum Sensing and Virulence Networks Using Boolean Modelling. IEEE Transactions on NanoBioscience 2020, 19, 394–402. [CrossRef]
- Wood, R., N.R..W.G.Y. flight of the robobees. Scientific American 2013, 308(3), 60â65.
Figure 1.
Relationship of terms used in modular robotics.
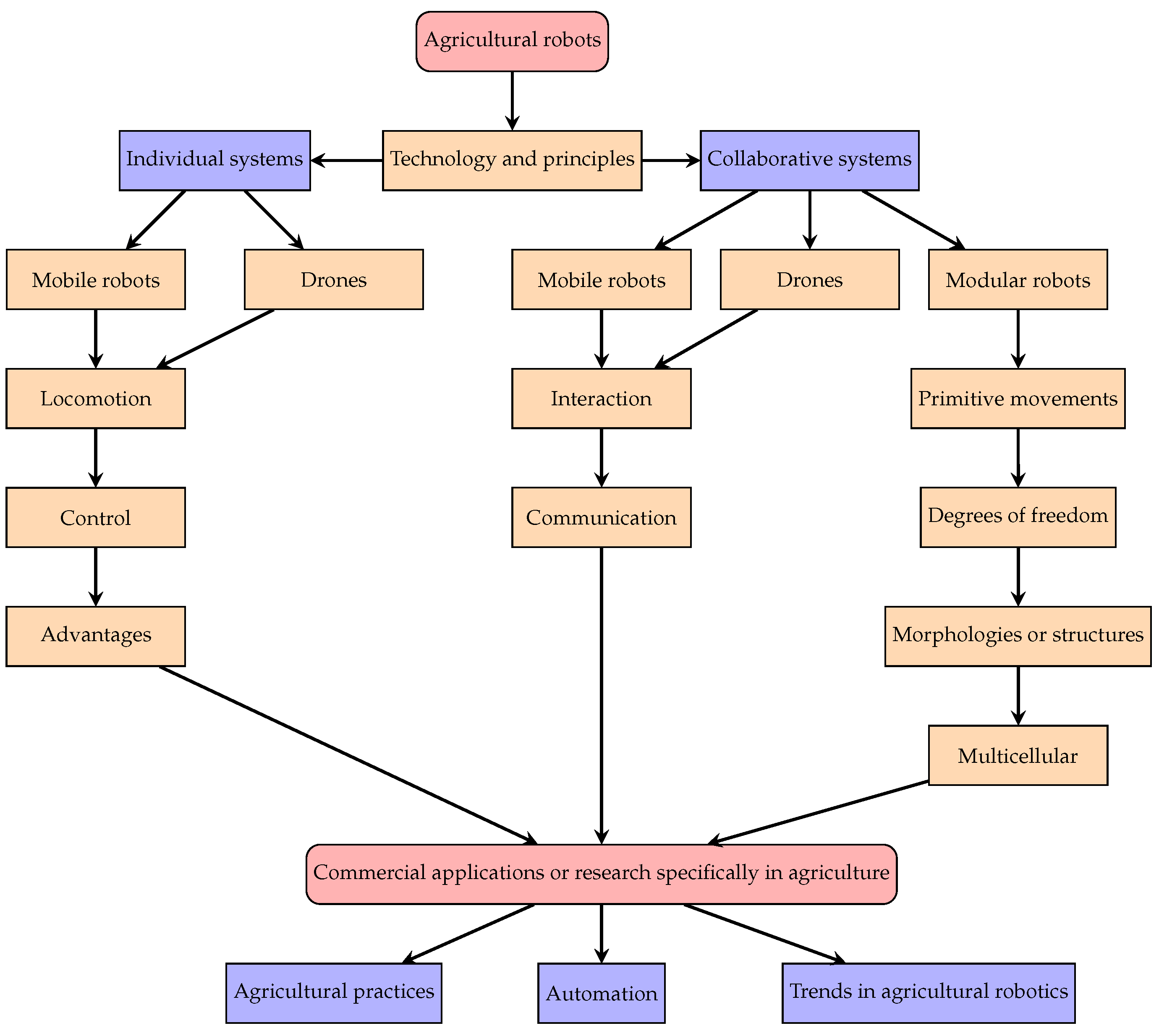
Figure 2.
Example of individual robotic systems
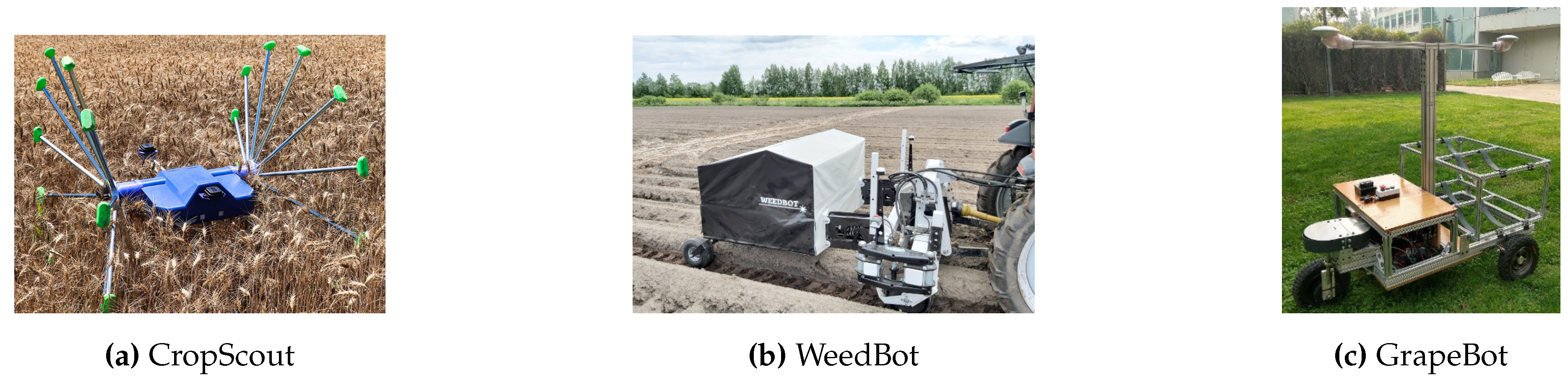
Figure 3.
Basic characteristics of modular robots.

Figure 4.
Examples of modular robots and their morphologies.
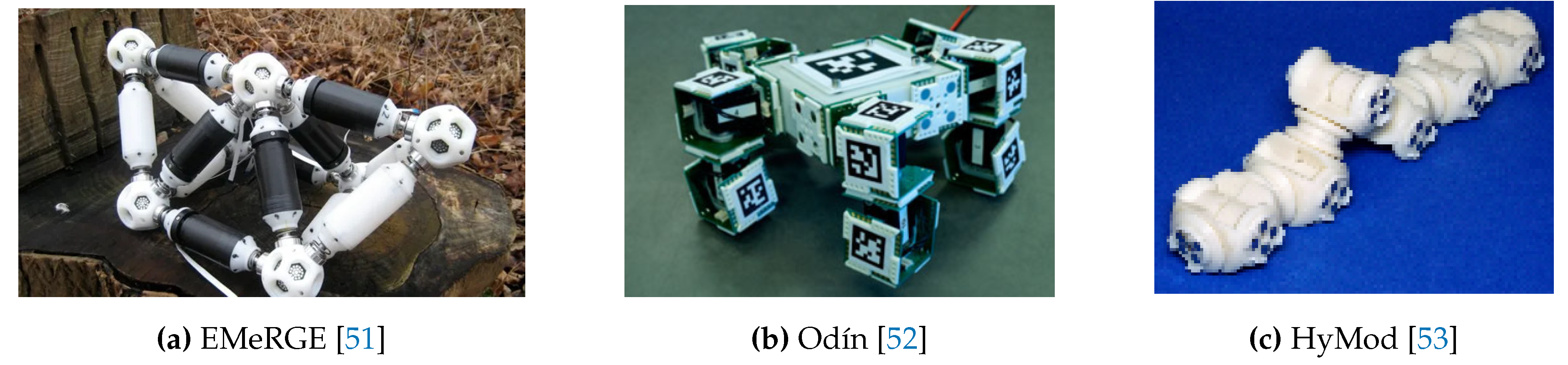
Table 1.
Comparison between an individual robotic system and a multi-robot system in agriculture.
| Category | Basic characteristics | Applications | Advantages | Disadvantages |
|---|---|---|---|---|
| Individual robot [13] | Capable of performing tasks autonomously or through remote operation. | Used in automated planting and harvesting, monitoring, and fertilization of crops. | Adaptability to different types of crops. | Limited in the variety of tasks they perform, high implementation and maintenance costs. |
| Multiple robots [14] | A group of robots working coordinately through a system of communication and collaboration among them. | Ideal for supervision and management of large crop areas and integrated weed control. | Increases the farmer’s reach and coverage in large expanses of land. | Coordination of individual robots is non-trivial and requires robust control methods to achieve effective interaction among them. |
Table 4.
Comparison of commercial multi-robot systems with agricultural applications.
| Name | Locomotion | Functional advantages | Communication mechanism | Year |
|---|---|---|---|---|
| SwarmFarm robots [41] | 4WS | Modularity and adaptability for various agricultural tasks | Centralized control panel | 2019 |
| DJI agricultural drones [29] | UAV | Quickly fumigates large crop areas | Radio signals | 2024 |
| Parrot drones for agricultural supervision [42] | UAV | Advanced imaging and sensor technology for crop monitoring and analysis | Remote control and mobile app | 2019 |
| Harvest automation HV-100 robots [43] | 4WS | Space optimization and efficiency in nurseries and garden centers | Radio signals and Wi-Fi | 2016 |
| Agrobotix harvest robots [44] | UAV | Autonomous harvesting for various types of crops | Radio signals | 2017 |
Note: *WS(Wheel Steering), UAV(Unmanned Aerial Vehicle).
Table 5.
Comparison of self-reconfigurable modular robots
| Robot name | Degrees of Freedom per module (DOF) | Actuator type | Self-reconfigurable | Communication interface | Control type | Scalability | Year of publication and authors | Potential applications |
|---|---|---|---|---|---|---|---|---|
| PolyBot | 1 | Motor and pneumatic cylinder | Yes | Wi-Fi - Unguided | Centralized and/or decentralized | High | Zhang, Roufas, & Yim, 2021, Brunete, Torres, Hernando, & Hernando, 2007 | Rough terrain exploration |
| M-Tran | 2 | Electric motor | Yes | Wi-Fi | Distributed | High | Kurokawa, et al., 2005; Murata & Kurokawa, 2007 | Agriculture, exploration, and rescue |
| S-BOT | 6 to 30 | Rotational servomotors, linear actuators, and stepper motors | Yes | Wi-Fi or Bluetooth | Decentralized | High | Reddy, Patlolla, Agrawal, & Anupama, 2016 | Agriculture, exploration, and rescue |
| Snake type | 6 | Electric motor | Yes | Wi-Fi | Centralized | High | Liu & Tong, 2021 | Inspection and maintenance, exploration and rescue |
| Macabot | 3 | Electric motor | Yes | Wi-Fi | Decentralized | High | Larizza, Murciano, Pappagallo, & Triggiani, 2006 | Exploration and rescue |
| Odin | 24 | Electric motors | Yes | Wi-Fi | Distributed | High | Lyder, Mendoza, & Stoy, 2008 | Exploration and rescue |
| HyMod | 27 | Electric motors | Yes | Wi-Fi | Distributed | High | Parrott, Dodd, & GroÃ, 2018 | Exploration and rescue, agriculture, and livestock management |
| HexaMob | 36 | Electric motors | Yes | Wi-Fi | Distributed | High | Gao, Huo, Seehra, Ramani, & Cipra, 2014 | Exploration and rescue, agriculture, and livestock management |
Note: This table summarizes the characteristics and applications of various self-reconfigurable modular robots.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



