Submitted:
26 July 2024
Posted:
29 July 2024
You are already at the latest version
Abstract
Constructing a globally consistent high-precision map is essential for the application of mobile robots. Existing optimization-based mapping methods typically constrain robot states in pose space during the graph optimization process, without directly optimizing the structure of the scene, thereby causing the map to be inconsistent. To address the above issues, this paper presents a three-dimensional (3D) LiDAR mapping framework (i.e., BA-CLM) based on LiDAR bundle adjustment (LBA) cost factors. We propose a multivariate LBA cost factor, which is built from a multi-resolution voxel map, to uniformly constrain the robot poses within a submap. The framework proposed in this paper applies the LBA cost factors for both local and global map optimization. Experimental results on several public 3D LiDAR datasets and a self-collected 32-line LiDAR dataset demonstrated that the proposed method achieves accurate trajectory estimation and consistent mapping.
Keywords:
consistent high-precision mapping
; LiDAR bundle adjustment
; graph optimization
1. Introduction
Simultaneous localization and mapping (SLAM) is widely used in the field of robotics. A consistent map is crucial for mobile robots to plan and navigate. It is desirable for a mapping method to have the capacity to construct a globally consistent high-precision map, especially in large-scale scenes.
SLAM can be divided into filter-based methods and optimization-based methods. While state-of-the-art filter-based SLAM methods [1,2,3] can achieve high-precision and robust positioning in the short term, they cannot correct the errors in the previous states and are therefore not suitable for globally consistent mapping. For the sake of efficiency, optimization-based SLAM approaches solve the pose graph optimization problem to construct a global map. The pose graph constrains states based on relative poses, which are commonly obtained through scan matching. However, accurately modeling of the noise for relative poses is difficult in practice, which hinders the effective guarantee of map consistency.
Constraining states based on the matching cost is another approach to achieve globally consistent mapping for optimization-based SLAM. D. Borrmann et al. [4] solved the matching cost minimization problem on a global scale after each pose graph optimization process to ensure the global consistency. K. Koideet al. [5] proposed a GPU-accelerated generalized iterative closest point (GICP) [6] factor to achieve real-time solving of the global matching cost minimization problem in the factor graph for globally consistent map construction. However, these approaches are limited by the shortcomings of iterative closest point (ICP)-based matching algorithms, as they only align every two frames of point clouds instead of directly optimizing the structure of the entire local map. This limitation results in drawbacks in terms of accuracy.
To address the aforementioned issues, a LiDAR bundle adjustment (LBA) cost factor [7] is proposed for map optimization in this paper. The proposed factor calculates the LBA cost using a multiple-frame synthesized voxel map and constrains the robot states through the matching cost. The proposed factor offers several advantages. First, the multivariate factor can uniformly constrain all states within a submap, which makes the constraints on the robot’s states tighter and more consistent compared with the traditional binary factor. Second, the synthesized voxel map effectively addresses the sparse nature of low-resolution LiDAR and is more efficient than k-d-tree-based maps. Finally, the LBA factor can be integrated with factors derived from measurements of other sensors for multi-sensor fusion mapping.
We further present a globally consistent LiDAR mapping framework based on the LBA cost factor. The framework consists of three modules: front-end odometry, local mapping, and global mapping. A sliding window approach is involved by the local mapping module to create LBA cost factors for the frames within the window, which are then added to the local factor graph to perform the local map optimization. Based on the overlap with previous keyframes, the latest marginalized frame will be filtered as a new keyframe. In the global mapping module, GPS absolute measurements and Scan context [8] (a fast encoding-based loop closure detection method) are introduced to effectively eliminate accumulated errors. The LBA cost factors are created for the keyframes within the detected loop to achieve globally consistent map optimization.
The main contributions of this paper can be summarized as follows:
- A voxel-based multivariate LBA cost factor is proposed for consistent mapping, which is created from a synthesized multi-resolution voxel map.
- A real-time globally consistent 3D LiDAR mapping framework (see Figure 1) is presented based on the LBA cost factor and CPU parallel computing.
- The efficiency and effectiveness of the proposed work are extensively validated on multiple public and self-collected LiDAR datasets.
2. Related Work
2.1. Graph-Based LiDAR SLAM
The LiDAR SLAM problem can be represented as a graph [9], which consists of nodes (poses) and edges (constraints) and can be solved by optimization methods (e.g., the Levenberg–Marquardt algorithm [10]). The iSAM proposed in [11] introduces incremental updates to the graph optimization process, enabling graph-based SLAM systems for real-time applications. For large-scale and long-term mapping, the graph-based SLAM adopts the method of global optimization and closed-loop processing, which can be used to improve the quality of the map.
A pose graph is a kind of graph that mainly imposes pose constraints. There are extensive LiDAR SLAM studies [12,13,14] that rely on pose graph optimization as the back-end to refine the trajectory estimation results. LIO-SAM [15] introduces the concept of a keyframe to back-end optimization, which significantly reduces the dimensionality of the pose graph. MULLS [16] proposes a two-stage optimization strategy for global pose graph optimization and further improves the convergence speed in the loop closure condition. The aforementioned approaches make pose-graph-based SLAM a low-computation-cost method. However, the traditional pose-graph-based approaches have many deficiencies. First, it is a general solution for pose-graph-based SLAM to roughly approximate the uncertainty of the pose constraint as a constant, which is difficult to evaluate in practice, leading to inaccuracy of the estimation. Second, the iterative solution process may easily converge to a local solution, particularly for the three degrees of freedom of rotation. Finally, the pose constraints fail to consider the refinement of the scene structures, causing the map to lose consistency.
To obtain an accurate and consistent map, matching costs can be directly added to the graph as constraints on the poses. In the series works by K. Koide et al. [5,17], voxelized GICP matching cost factors were added to the factor graph to minimize the global registration error over the entire map. However, this approach is not robust to the sparse nature of LiDAR scans for calculating the matching cost only between two frames of point clouds in the GICP method. Furthermore, the point cloud registration methods simply align the nearest feature points without considering the distribution of features, which may disrupt the overall structure of the features. Based on the above analysis, acquiring the matching cost using the structure-from-motion method is a more reasonable choice than acquiring it from a point cloud registration method, because a structure-from-motion method can efficiently refine the scene structure at the same time. Therefore, we propose an LBA cost factor in this paper, which uniformly and compactly constrains the states within a large range for accurate globally consistent mapping.
2.2. LiDAR Bundle Adjustment
Bundle adjustment (BA), which simultaneously optimizes the robot poses and scene structure by minimizing the reprojection errors of the matched features, is widely used in the vision-based structure-from-motion and SLAM methods [18,19,20]. In LiDAR mapping, LBA differs significantly from traditional vision-based BA, as the sparse nature of point clouds makes exact feature matching impossible. BALM [7] first formulates the LBA by minimizing the distance between a feature point and its matched feature. BALM2 [21], a subsequent version of BALM, derives closed-form derivatives for LBA optimization and develops an efficient second-order LBA solver based on the concept of point clusters. BA-LIOM [22] addresses the issue of ground warping by utilizing an LBA solver to provide pose estimations for the pose-graph-based back-end. Given a good initial pose estimation, HBA [23] improves the mapping quality by employing a two-step approach involving bottom-up hierarchical BA and top-down pose graph optimization. While the offline method HBA demonstrates the potential of LBA in reconstructing accurate and consistent large-scale LiDAR point cloud maps, the high computational costs limit the application of global LBA optimization for real-time consistent mapping systems.
2.3. Voxel Map
A voxel map is a hash-based map structure proposed in [24]. Compared with a k-d tree, a map structure that widely used for point cloud registration and SLAM, a voxel map can be built and updated more efficiently. A modified voxel method, iVox, was proposed in [25], which supports incremental insertion and parallel approximated k-nearest neighbor (k-NN) queries and further improves the search and update efficiency of the voxel map. VoxelMap++ presented in [26] uses a union-find-based voxel merging method to enhance the accuracy of plane fitting. K. Koide et al. [27] proposed a multi-point distribution aggregation approach to robustly estimate the distribution of a voxel and released an open source voxel project that can be rapidly constructed by parallel computation.
Previous LBA studies did not focus much on efficiency promotion. In the traditional LBA work [21,23], an octree-based voxel map method is used to cut local LiDAR scans into point clusters. These approaches require the eigenvalues to be computed for each voxel during the map building process. The numerous repetitive calculations make the computation cost too high for global mapping. As a result, there is room for improvements in efficiency by combining the aforementioned voxel map methods.
3. Methodology
3.1. LiDAR Bundle Adjustment Cost Factor
Given frames of point clouds , the robot poses corresponding to the frames can be written as
where is the transformation matrix from the body to the world. These point clouds are aligned to the world coordinate system and can be segmented into a multi-resolution voxel map. The number of voxels is . The full voxel map can be denoted as . All the points within the i-th voxel constitute a point cluster that corresponds to a planar feature. The distribution covariance matrix of is
where and are
The eigenvalues of describe the distribution of points within the voxel. According to principal component analysis (PCA) theory [28], the eigenvalues’ cumulative contribution to is calculated to judge whether the voxel corresponds to a planar feature. In this paper, we discriminate the features based on the following equation:
where is a constant threshold (e.g., 0.9), and is the k-th largest eigenvalue of .
Although the points within the extracted voxel according to (5) are distributed in a plane as a whole, there is still a possibility of having outliers. Due to the interference of measurement errors and noise, the distance from the planar feature points to the plane should follow a normal distribution with a mean of zero, that is,
where is the eigenvector of and also a unit vector in the feature plane normal direction. Hence, the outliers are removed according to the three-sigma rule of thumb.
The goal of LBA optimization is to estimate the optimal robot pose by minimizing the sum of the smallest eigenvalues of the covariance matrices of all voxels. For one voxel, the LBA error is
where is the corresponding eigen vector of . For a local map, the entire LBA error and LBA optimization problem can be defined as follows:
The LBA optimization problem is rewritten with a Hessian factor in the form of GTSAM (i.e., LBA cost factor). The matrix to construct the LBA cost factor is shown as follows [7]:
The diagram of the LBA cost factor is shown in Figure 2. The matching cost is calculated from the entire voxel map, rather than from a pair of point clouds. Thus, compared with binary factors, the proposed factor effectively solves the general problem of ground curling and is more robust to the sparsity of point clouds.
3.2. Multi-Resolution Voxel Map
To address the difference in feature scales, [7] proposes an adaptive octree-based voxelization method. This method is extremely time consuming for global mapping because it needs to calculate the eigenvalues of every voxel and iteratively subdivide each default-sized voxel until all the subdivided points belong to the same feature or reach the maximum level of subdivision. To cut the point cloud into point clusters in real time, we abandoned the octree data structure in our research. Inspired by [29], a multi-frame synthesized voxel pyramid method is adopted to extract the planar point clusters at different scales, which can be rapidly constructed through parallel computing.
Considering the sparse nature of point clouds, we accumulate a certain number of point clouds to form a submap. Each submap corresponds to an LBA cost factor. For a submap, we simultaneously voxelize all the frames into three layers. During the optimization process, we extract all the voxels that store planar features via (5) from the lowest-resolution layer to the highest-resolution layer. All the extracted voxels are used to construct the LBA cost factor of the map. To avoid redundant constraints, the extracted voxels in the lower layer will be disabled in the upper layer. When a frame is removed from the submap, all planar points are retained to prevent submap drifting.
Despite its higher computational complexity, the multi-resolution method proposed in this paper significantly reduces the time complexity compared with the method proposed in [7], as it can be implemented through parallel computing.
3.3. Global Mapping Framework
The proposed framework is shown in Figure 1. It is worth noting that the LBA cost factor relies on relatively accurate voxel segmentation. Thus, when the new LiDAR frame comes in, a front-end odometry module is required to provide an initial guess for the robot pose of the frame. In this work, we use Faster-LIO [25], a voxel-based lightweight LiDAR odometry module, for point cloud distortion correction and initial state estimation. This module can be replaced by any LiDAR odometry or point cloud registration algorithm, such as TEASER [30] and NDT [31].
3.3.1. Local Mapping Module
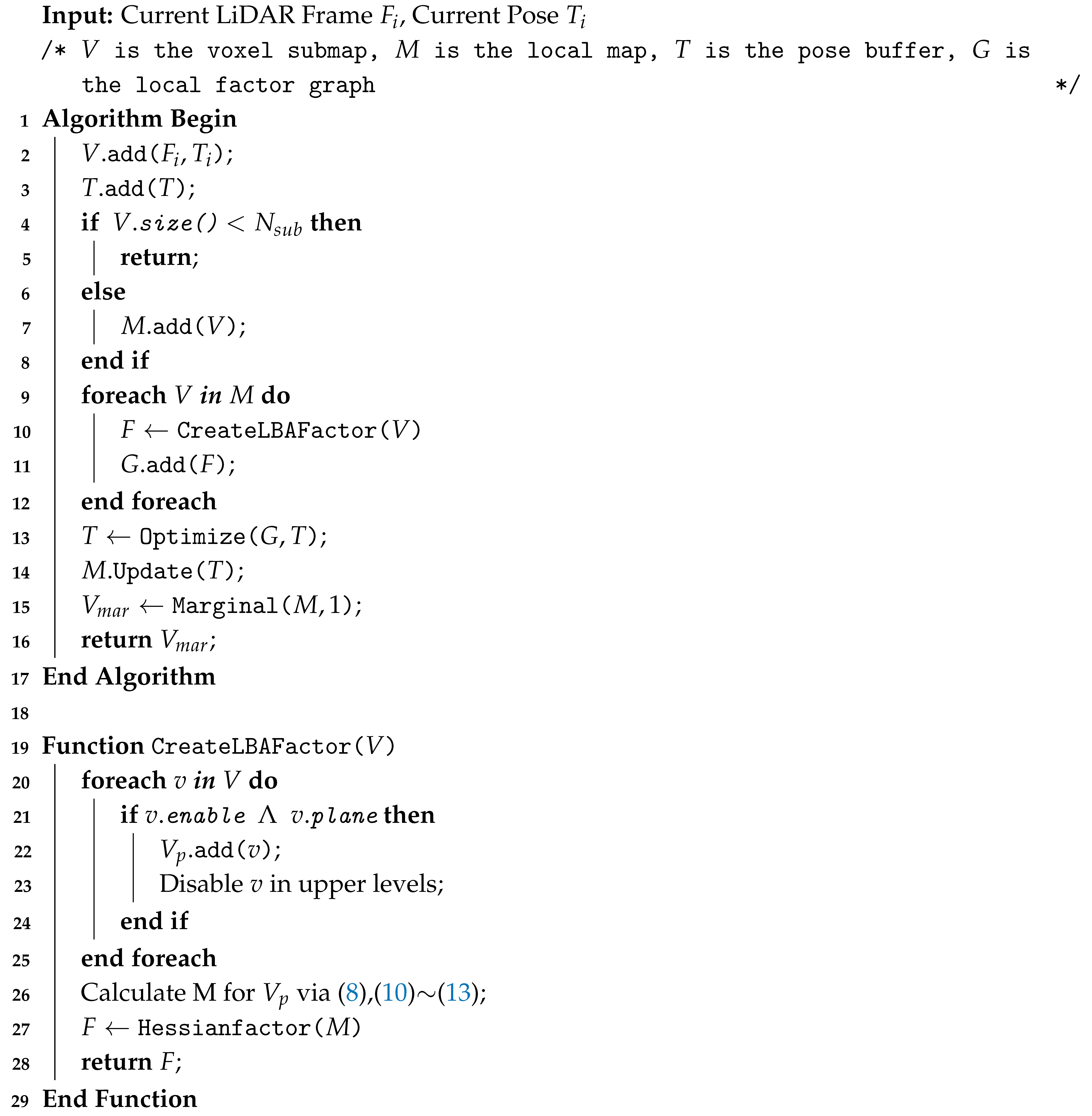
The LiDAR frame with an initial guess is fed into the local mapping module to obtain a more accurate pose estimate, which is summarized in Algorithm 1. The local mapping module manages the frames via a sliding window. The accumulated frames are synthesized and constructed into a multi-resolution voxel submap with a certain step length. To avoid drifting between submaps, there are some frames (common view frames) that exist simultaneously in adjacent submaps. Due to the presence of common view frames, the new submap can be incrementally constructed based on the previous submap through pop and push operations. This incremental method is much more rapid and efficient than constructing a brand new voxel map. We construct LBA cost factors for all submaps in the local map and feed them into the local factor graph (see Figure 3) for optimization. After each optimization, the positions of points within the map will be updated. The voxel submap will only be recut when the robot pose increment is greater than 50% of the lowest-layer voxel edge length. After local map optimization, the frames in the oldest submap are marginalized, which means that the relative transformations among them are fixed.
| Algorithm 1:Local Mapping |
 |
3.3.2. Global Mapping Module
The significance of the global mapping module is to maintain the consistency of the global map in long-term mapping. To speed up global map optimization, we reduce the number of pose variables by merging the frames of the same submap into one. As mentioned in Section 3.2, the points from previous frames are preserved in the new marginalized submap. We define the overlap ratio of the new marginalized submap as
where p is a constant related to the number of LiDAR lines and the step length. In this work, the submap merging frame becomes a new keyframe if the ratio given by Eq. 15 is less than . Initially, we align the trajectory of the local mapping and GPS to calibrate the transformation between the world coordinate system and the ENU coordinate system. Following calibration, GPS factors are periodically added to the global factor graph to constrain the pose of keyframes. We utilize Scan context [8] to detect the closed-loops among keyframes. Once a closed-loop is detected, LBA cost factors are generated for all keyframes within the shortest closed-loop, which makes it possible to perform BA optimization on frames that are spatially close but have significant time intervals. This process refines the map structure for a large region, but it is time consuming. Therefore, global map optimization will take place at large time intervals.
3.4. Implementation Detail
Both CPU and GPU parallel acceleration can be applied to the improved voxel map. In this work, we use the OpenMP library to implement CPU parallel computing acceleration. We assign voxels to threads to create, update, recut, and calculate the LBA cost for the voxel map. By CPU parallel computing, BA-CLM can run in real time (see Section 4.3).
4. Evaluation
4.1. Public Datasets
To evaluate the accuracy, BA-CLM was tested on the KITTI [32], M2DGR [33], and NCLT [34] datasets(see Figure 4), with the root mean square error (RMSE) of the absolute trajectory error (ATE) serving as the accuracy evaluation metric. The LiDAR data was collected from a 64-line LiDAR system for KITTI and from a 32-line LiDAR system for M2DGR and NCLT.
4.1.1. KITTI and M2DGR
On these two datasets, BA-CLM was compared with several state-of-the-art real-time 3D LiDAR SLAM methods: Faster-LIO [25], FAST-LIO2 [1], LIO-SAM [15], BALM2 [21], HBA [23], and A-LOAM (an improved version of LOAM [35]). To ensure the rigor of the experiment, the GPS factor for BA-CLM are disable, and the initial pose estimates for the BALM2 and HBA came from Faster-LIO (same as for BA-CLM), rather than from MULLS [16]. The HBA reached the optimal outcome within five iterations of global BA, which means the runtime for the HBA was close to the duration of the sequences. Therefore, the experimental results in this study were different from those in [23].
Experimental results on the partial sequences are reported in Table 1. These show that BA-CLM yielded the highest or second-highest accuracy on most sequences. On the sequences without a loop (marked with `*’), the global mapping module of BA-CLM was deactivated. The ATE of the local mapping module of BA-CLM was still equivalent to that of the global BA method HBA and much lower than those of the other methods. On the sequences with loops, BA-CLM exhibited extremely high accuracy. The increase in accuracy was caused by the added LBA cost factors created by loop detection. Notably, there was one exception: BA-CLM had a lightly larger ATE on KITTI07. In the sequence, a large initial error led to an incorrect construction for the LBA cost factor. This confirmed the dependence of the LBA method on relatively exact initial estimates. However, this issue could be efficiently solved by limiting the trajectory errors to a range through the addition of GPS absolute measurements.
4.1.2. NCLT
The NCLT dataset [34], which has a much longer duration than the KITTI and M2DGR datasets, was adopted to evaluate the accuracy of BA-CLM for long-term mapping.
The RMSEs of the ATE on the NCLT dataset are summarized in Table 2. The duration of the sequences listed was 2597.130, 5072.362, 3309.720, and 1021.680 s. As can be seen, despite Faster-LIO [25] (the initial guess for BA-CLM) having a high average error (), BA-CLM still showed great accuracy in trajectory estimation (the average error was ). The trajectories of BA-CLM on sequences 20120429, 20120615, and 20130110 are shown in Figure 6. It is evident that BA-CLM successfully corrected the trajectories, regardless of whether Faster-LIO significantly deviated from the ground truth. This demonstrated that BA-CLM only needs a relatively accurate relative pose as an initial guess to achieve accurate estimation over a global range, even in long-term operating situations.
4.2. Self-Collected Dataset
The focus of this discussion is the map consistency. BA-CLM was compared with FAST-LIO2 (an odometry method without a back-end) and LIO-SAM (a pose-graph-based mapping method) on a mid-term self-collected dataset (the trajectory length ranged from 1000 to 2000 m). The sensors we used for this dataset included a LSLIDAR 32-line LiDAR, a 9-axis inertial measurement unit (IMU), and a real-time kinematic positioning (RTK) system. During the collection process, a vehicle was equipped with the aforementioned sensors and driven in an urban environment at a speed of around 30 km/h.
The mean map entropy (MME [36]) was adopted to evaluate the mapping consistency. We built a submap every 10 m and calculated the average MMEs of all the submaps. The average MMEs on the self-collected dataset are shown in Table 3. BA-CLM showed the smallest MMEs (, , and ) on all the three sequences, while they exhibited larger MMEs for FAST-LIO2 and LIO-SAM. Figure 7 shows the mapping result. The map constructed by BA-CLM maintained good quality. Meanwhile, FAST-LIO2 exhibited significant cumulative errors and severe stratification on the ground and walls. LIO-SAM correctly detected the loop and eliminated the cumulative errors, but the trajectory was not completely corrected due to the influence of the previous odometry factors. This showed that the pose-graph-based method only optimized in pose space without considering the map consistency, resulting in map divergence. In conclusion, thanks to the matching cost minimization approach, BA-CLM has a strong capacity to maintain map consistency.
4.3. Runtime Analysis
Real-time performance is an important specification in SLAM systems. We tested the efficiency of BA-CLM on several 32-line LiDAR datasets. The computation platform used for the tests was a laptop equipped with an Intel i9-12900H 2.50 CPU and 32 of RAM.
The detailed runtime of BA-CLM is shown in Table 4. We constructed a multi-resolution voxel map every five frames, with an average time consumption of 51.8 ms. The steps in lines 2 to 5, which were executed at a frequency of once per second, required only approximately 300 ms in total. The global map optimization performed the BA refinement on a much larger scale than the local optimization, resulting in an average time consumption of 847.2 ms. However, it was only executed when a closed-loop was detected, which means there was a few-minute interval between the two global optimization processes (as can be seen in Figure 8). Overall, the average processing time per frame of BA-CLM (55.3 ms) was much lower than the LiDAR scan interval (100 ms). We can conclude that BA-CLM could run in real time.
5. Conclusions
In this paper, we propose a uniform and tight multivariate LBA cost factor for global mapping to improve the accuracy of pose estimation and the consistency of the map. A multi-resolution voxel map that supports both CPU and GPU parallel acceleration is used to rapidly create the LBA cost factor. We present a real-time global mapping framework based on the proposed factor, which minimizes the matching cost via factor graph optimization. Abundant experiments on several datasets demonstrated that BA-CLM outperformed other state-of-the-art SLAM methods in terms of accuracy. In future work, we will fuse more kinds of raw sensor measurements (e.g., wheel speed sensor, IMU, and 4D-radar) into our framework to improve the robustness.
Funding
This research was funded by the Shenzhen Science and Technology Program grant number JCYJ20220530162202005; the National Natural Science Foundation of China grant number 62173192.
References
- Xu, W.; Cai, Y.; He, D.; Lin, J.; Zhang, F. FAST-LIO2: Fast Direct LiDAR-Inertial Odometry. IEEE Transactions on Robotics 2022, 38, 2053–2073. [Google Scholar] [CrossRef]
- He, D.; Xu, W.; Chen, N.; Kong, F.; Yuan, C.; Zhang, F. Point-LIO: Robust High-Bandwidth Light Detection and Ranging Inertial Odometry. Advanced Intelligent Systems 2023, 5, 2200459. [Google Scholar] [CrossRef]
- Chen, Z.; Xu, Y.; Yuan, S.; Xie, L. iG-LIO: An Incremental GICP-based Tightly-coupled LiDAR-inertial Odometry. IEEE Robotics and Automation Letters 2024. [Google Scholar] [CrossRef]
- Borrmann, D.; Elseberg, J.; Lingemann, K.; Nüchter, A.; Hertzberg, J. Globally consistent 3D mapping with scan matching. Robotics and Autonomous Systems 2008, 56, 130–142. [Google Scholar] [CrossRef]
- Koide, K.; Yokozuka, M.; Oishi, S.; Banno, A. Globally Consistent 3D LiDAR Mapping With GPU-Accelerated GICP Matching Cost Factors. IEEE Robotics and Automation Letters 2021, 6, 8591–8598. [Google Scholar] [CrossRef]
- Segal, A.; Haehnel, D.; Thrun, S. Generalized-icp. Robotics: science and systems. Seattle, WA, 2009, Vol. 2, p. 435.
- Liu, Z.; Zhang, F. BALM: Bundle Adjustment for Lidar Mapping. IEEE Robotics and Automation Letters 2021, 6, 3184–3191. [Google Scholar] [CrossRef]
- Kim, G.; Kim, A. Scan Context: Egocentric Spatial Descriptor for Place Recognition Within 3D Point Cloud Map. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018, pp. 4802–4809. [CrossRef]
- Grisetti, G.; Kümmerle, R.; Stachniss, C.; Burgard, W. A Tutorial on Graph-Based SLAM. IEEE Intelligent Transportation Systems Magazine 2010, 2, 31–43. [Google Scholar] [CrossRef]
- Moré, J.J. The Levenberg-Marquardt algorithm: implementation and theory. Numerical analysis: proceedings of the biennial Conference held at Dundee, June 28–July 1, 1977. Springer, 2006, pp. 105–116.
- Kaess, M.; Ranganathan, A.; Dellaert, F. iSAM: Incremental Smoothing and Mapping. IEEE Transactions on Robotics 2008, 24, 1365–1378. [Google Scholar] [CrossRef]
- Mendes, E.; Koch, P.; Lacroix, S. ICP-based pose-graph SLAM. 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). IEEE, 2016, pp. 195–200.
- Chen, X.; Milioto, A.; Palazzolo, E.; Giguère, P.; Behley, J.; Stachniss, C. SuMa++: Efficient LiDAR-based Semantic SLAM. 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019, pp. 4530–4537. [CrossRef]
- Li, K.; Li, M.; Hanebeck, U.D. Towards high-performance solid-state-lidar-inertial odometry and mapping. IEEE Robotics and Automation Letters 2021, 6, 5167–5174. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Rus, D. LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020, pp. 5135–5142. [CrossRef]
- Pan, Y.; Xiao, P.; He, Y.; Shao, Z.; Li, Z. MULLS: Versatile LiDAR SLAM via multi-metric linear least square. 2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2021, pp. 11633–11640.
- Koide, K.; Yokozuka, M.; Oishi, S.; Banno, A. Globally Consistent and Tightly Coupled 3D LiDAR Inertial Mapping. 2022 International Conference on Robotics and Automation (ICRA), 2022, pp. 5622–5628. [CrossRef]
- Mur-Artal, R.; Tardós, J.D. Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras. IEEE transactions on robotics 2017, 33, 1255–1262. [Google Scholar] [CrossRef]
- Campos, C.; Elvira, R.; Rodríguez, J.J.G.; Montiel, J.M.; Tardós, J.D. Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap slam. IEEE Transactions on Robotics 2021, 37, 1874–1890. [Google Scholar] [CrossRef]
- Gopinath, S.; Dantu, K.; Ko, S.Y. Improving the Performance of Local Bundle Adjustment for Visual-Inertial SLAM with Efficient Use of GPU Resources. 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 6239–6245. [CrossRef]
- Liu, Z.; Liu, X.; Zhang, F. Efficient and Consistent Bundle Adjustment on Lidar Point Clouds. IEEE Transactions on Robotics 2023, 39, 4366–4386. [Google Scholar] [CrossRef]
- Li, R.; Zhang, X.; Zhang, S.; Yuan, J.; Liu, H.; Wu, S. BA-LIOM: tightly coupled laser-inertial odometry and mapping with bundle adjustment. Robotica 2024, 1–17. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Z.; Kong, F.; Zhang, F. Large-Scale LiDAR Consistent Mapping Using Hierarchical LiDAR Bundle Adjustment. IEEE Robotics and Automation Letters 2023, 8, 1523–1530. [Google Scholar] [CrossRef]
- Nießner, M.; Zollhöfer, M.; Izadi, S.; Stamminger, M. Real-time 3D reconstruction at scale using voxel hashing. ACM Transactions on Graphics (ToG) 2013, 32, 1–11. [Google Scholar] [CrossRef]
- Bai, C.; Xiao, T.; Chen, Y.; Wang, H.; Zhang, F.; Gao, X. Faster-LIO: Lightweight Tightly Coupled Lidar-Inertial Odometry Using Parallel Sparse Incremental Voxels. IEEE Robotics and Automation Letters 2022, 7, 4861–4868. [Google Scholar] [CrossRef]
- Wu, C.; You, Y.; Yuan, Y.; Kong, X.; Zhang, Y.; Li, Q.; Zhao, K. VoxelMap++: Mergeable Voxel Mapping Method for Online LiDAR (-Inertial) Odometry. IEEE Robotics and Automation Letters 2023, 9, 427–434. [Google Scholar] [CrossRef]
- Koide, K.; Yokozuka, M.; Oishi, S.; Banno, A. Voxelized GICP for Fast and Accurate 3D Point Cloud Registration. 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021, pp. 11054–11059. [CrossRef]
- Abdi, H.; Williams, L.J. Principal component analysis. Wiley interdisciplinary reviews: computational statistics 2010, 2, 433–459. [Google Scholar] [CrossRef]
- Peng, F.G.; Liu, Y.; Ji, D.H.; Liu, J.R.; Qi, G.T. The method of mass LIDAR point cloud visualization based on “Point Cloud Pyramid”. Proceedings of 2012 International Conference on Measurement, Information and Control, 2012, Vol. 1, pp. 177–180. [CrossRef]
- Yang, H.; Shi, J.; Carlone, L. Teaser: Fast and certifiable point cloud registration. IEEE Transactions on Robotics 2020, 37, 314–333. [Google Scholar] [CrossRef]
- Biber, P.; Strasser, W. The normal distributions transform: a new approach to laser scan matching. Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), 2003, Vol. 3, pp. 2743–2748 vol.3. [CrossRef]
- Geiger, A.; Lenz, P.; Urtasun, R. Are we ready for autonomous driving? the kitti vision benchmark suite. 2012 IEEE conference on computer vision and pattern recognition. IEEE, 2012, pp. 3354–3361.
- Yin, J.; Li, A.; Li, T.; Yu, W.; Zou, D. M2dgr: A multi-sensor and multi-scenario slam dataset for ground robots. IEEE Robotics and Automation Letters 2021, 7, 2266–2273. [Google Scholar] [CrossRef]
- Carlevaris-Bianco, N.; Ushani, A.K.; Eustice, R.M. University of Michigan North Campus long-term vision and lidar dataset. The International Journal of Robotics Research 2016, 35, 1023–1035. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. LOAM: Lidar odometry and mapping in real-time. Robotics: Science and systems. Berkeley, CA, 2014, Vol. 2, pp. 1–9.
- Razlaw, J.; Droeschel, D.; Holz, D.; Behnke, S. Evaluation of registration methods for sparse 3D laser scans. 2015 European Conference on Mobile Robots (ECMR), 2015, pp. 1–7. [CrossRef]
Figure 1.
Block diagram of the proposed framework.
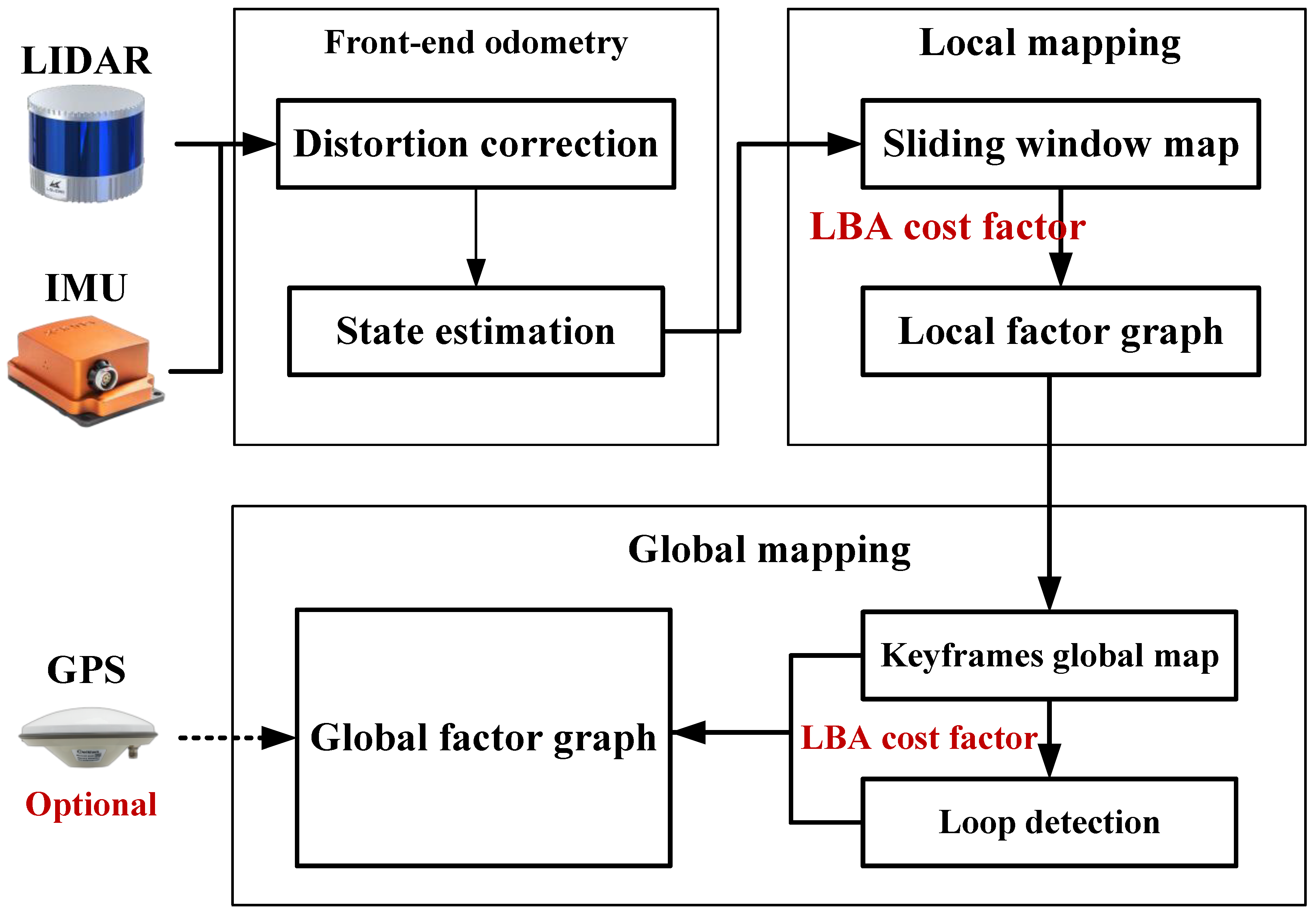
Figure 2.
For the same submap, the robot poses can be constrained by one proposed LBA cost factor or a substantial number of traditional binary cost factors in a fully connected form.
Figure 2.
For the same submap, the robot poses can be constrained by one proposed LBA cost factor or a substantial number of traditional binary cost factors in a fully connected form.
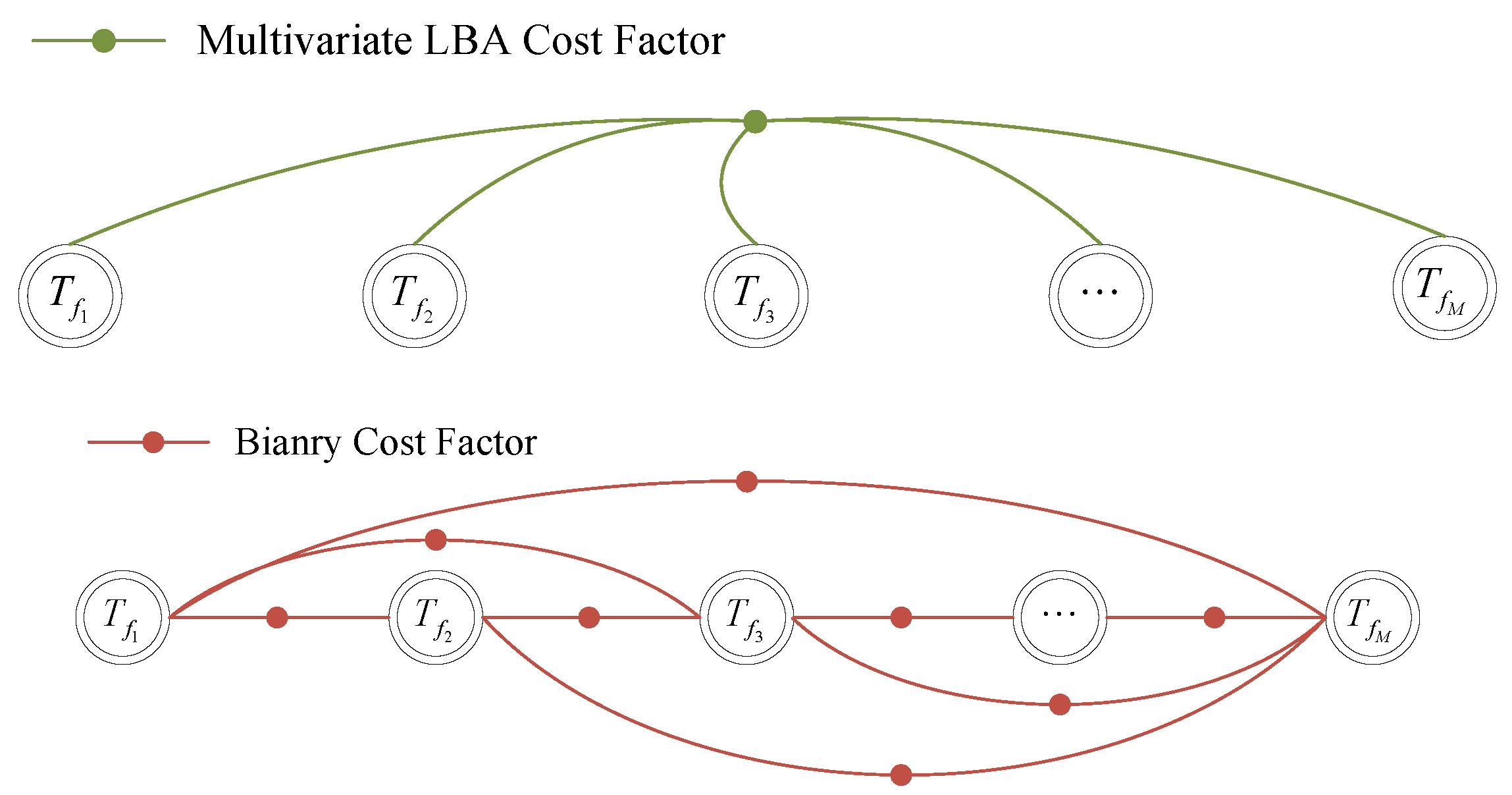
Figure 3.
Factor graph for the local mapping module. For the purpose of demonstration, the submap size in this figure is 4, and the step length is 3. For this work, we set the maximum number of factors to 8, the submap size to 10, and the step size to 5.
Figure 3.
Factor graph for the local mapping module. For the purpose of demonstration, the submap size in this figure is 4, and the step length is 3. For this work, we set the maximum number of factors to 8, the submap size to 10, and the step size to 5.
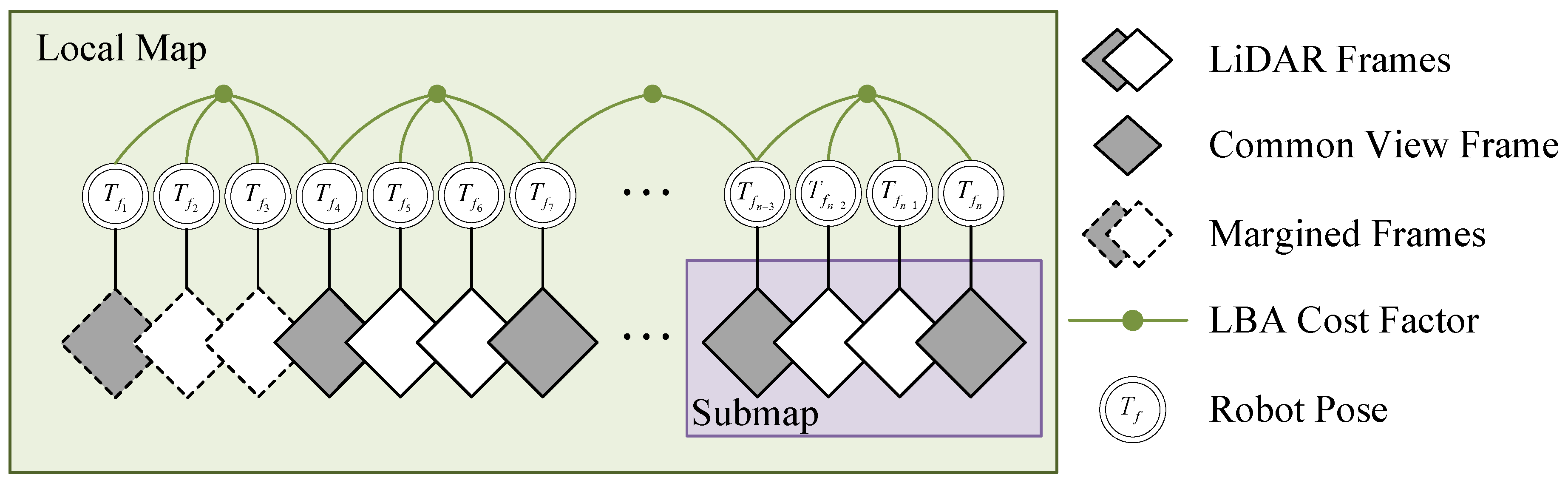
Figure 4.
Detailed mapping result of BA-CLM on public datasets. The first column of images displays the bird’s eye views of the overall scenes. The second column shows the details of the map locations highlighted by red blocks. The rows of images from up to down correspond to the LIO-SAM-WEST, NCLT-20130110, and M2DGR-STREET04 datasets. The scenes’ objects (the windows and vehicles in (b), the branches in (d), and the bridge’s railing in (f)) are clearly visible, demonstrating the mapping clarity of our algorithm.
Figure 4.
Detailed mapping result of BA-CLM on public datasets. The first column of images displays the bird’s eye views of the overall scenes. The second column shows the details of the map locations highlighted by red blocks. The rows of images from up to down correspond to the LIO-SAM-WEST, NCLT-20130110, and M2DGR-STREET04 datasets. The scenes’ objects (the windows and vehicles in (b), the branches in (d), and the bridge’s railing in (f)) are clearly visible, demonstrating the mapping clarity of our algorithm.
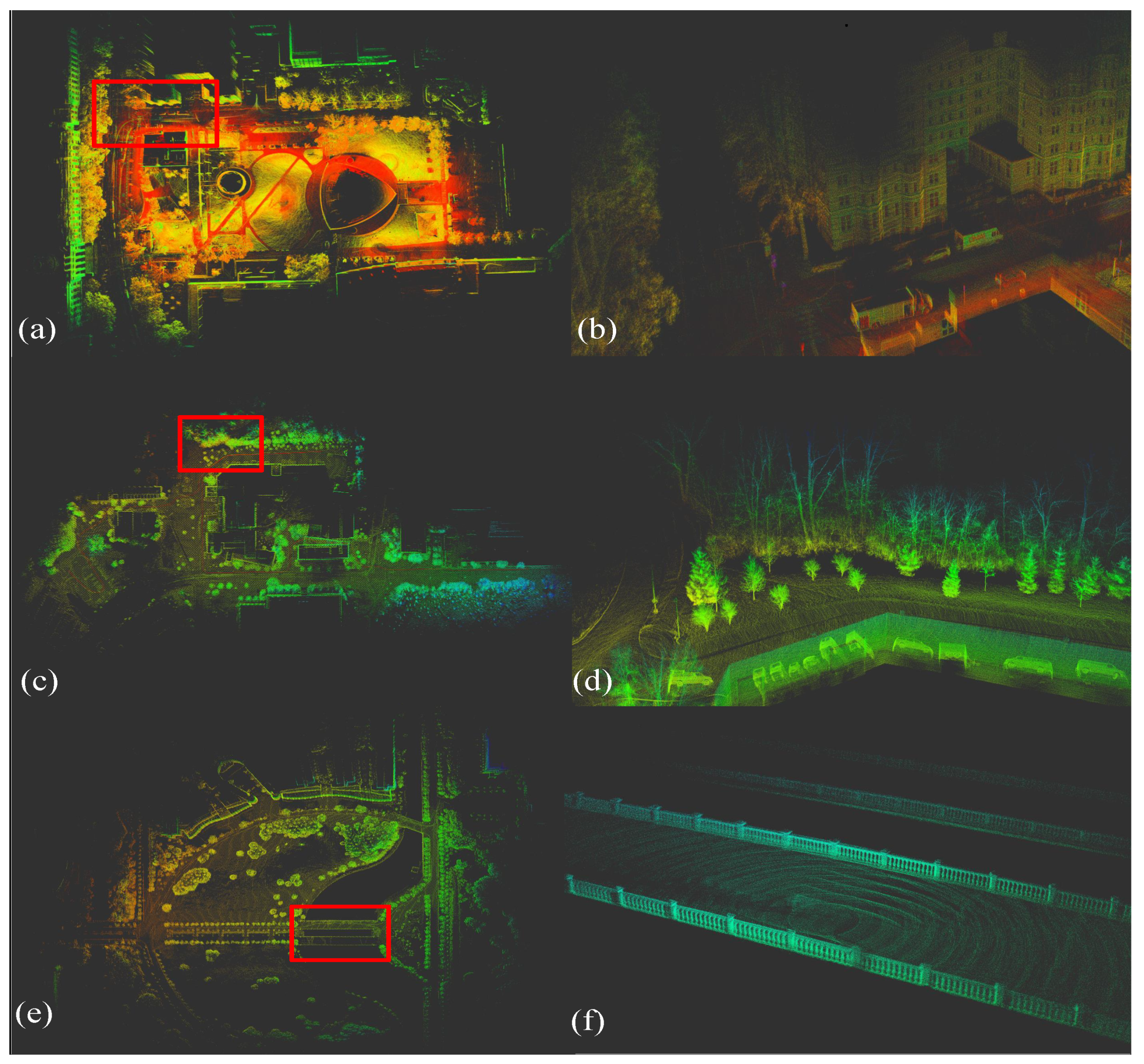
Figure 5.
Mapping result of BA-CLM aligned with Google earth on M2DGR dataset [33].
Figure 5.
Mapping result of BA-CLM aligned with Google earth on M2DGR dataset [33].
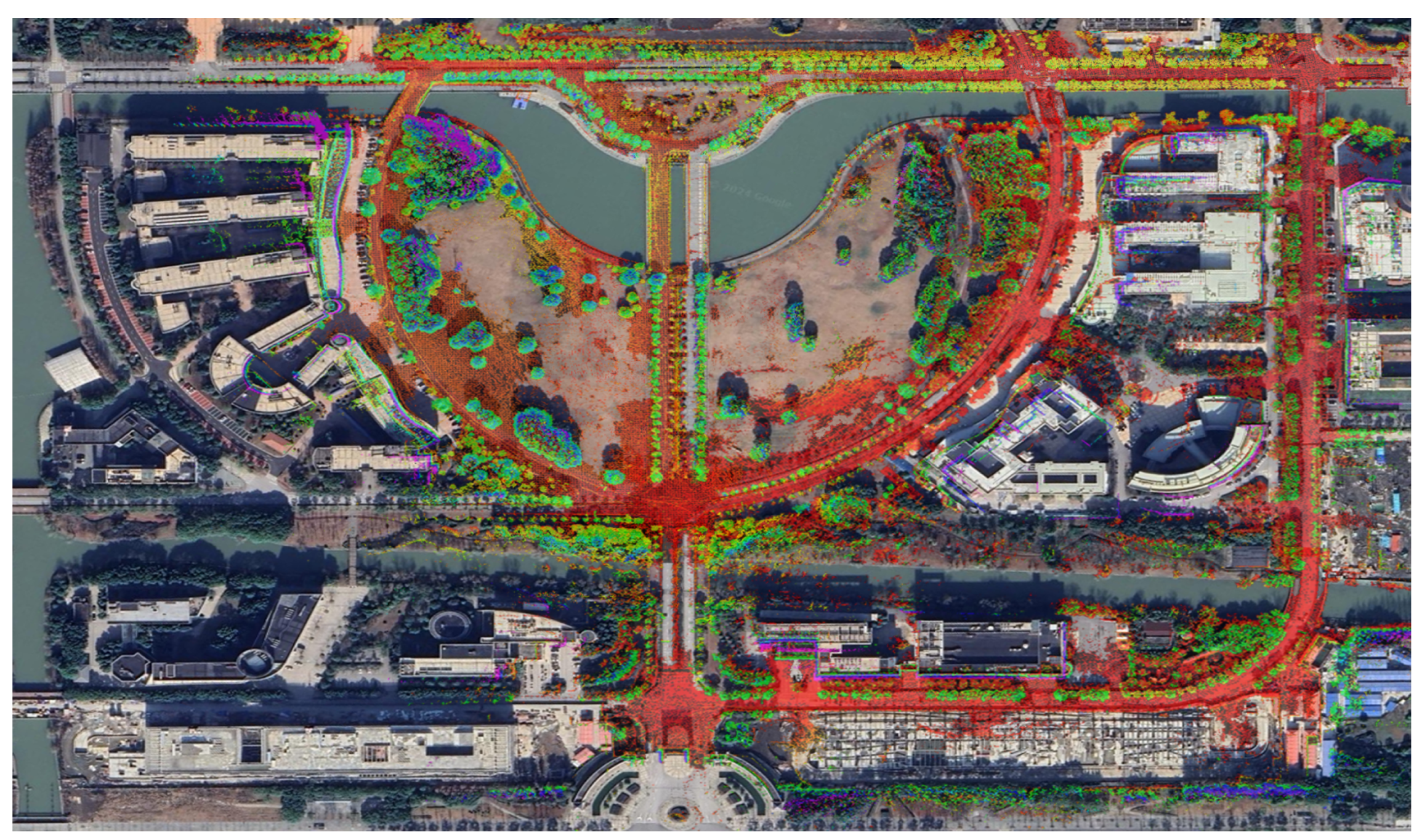
Figure 6.
Trajectory of BA-CLM on sequence 20120429, 20120615, and 20130110 of the NCLT dataset [34]. It shows that BA-CLM achieved accurate trajectory estimation despite the initial guess deviating from the ground truth.
Figure 6.
Trajectory of BA-CLM on sequence 20120429, 20120615, and 20130110 of the NCLT dataset [34]. It shows that BA-CLM achieved accurate trajectory estimation despite the initial guess deviating from the ground truth.
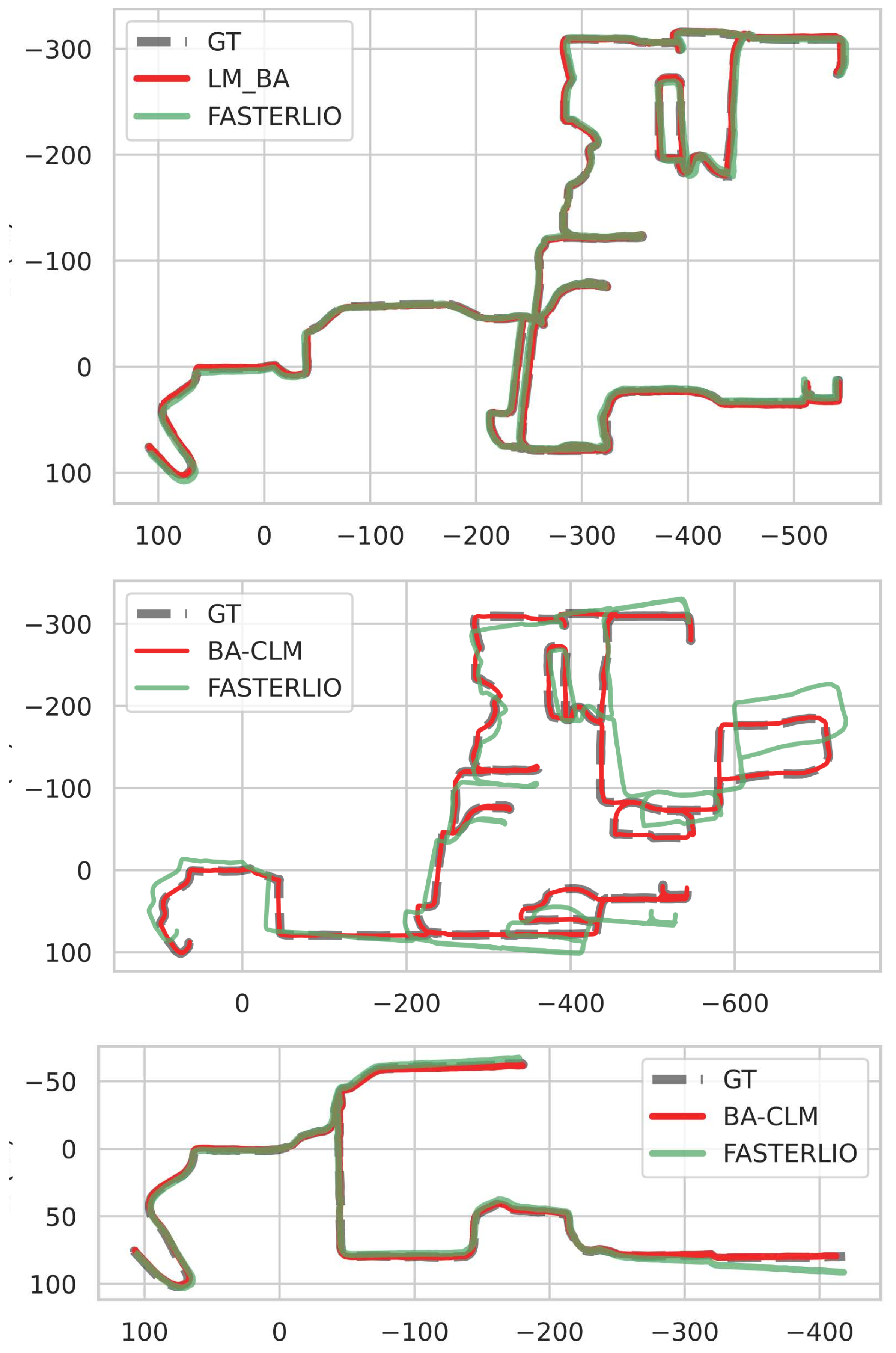
Figure 7.
Mapping result of BA-CLM on the self-collected dataset presented from bird’s eye view. The partial map highlighted by the red block is zoomed in on and compared with the FAST-LIO2 and LIO-SAM results [1,15].
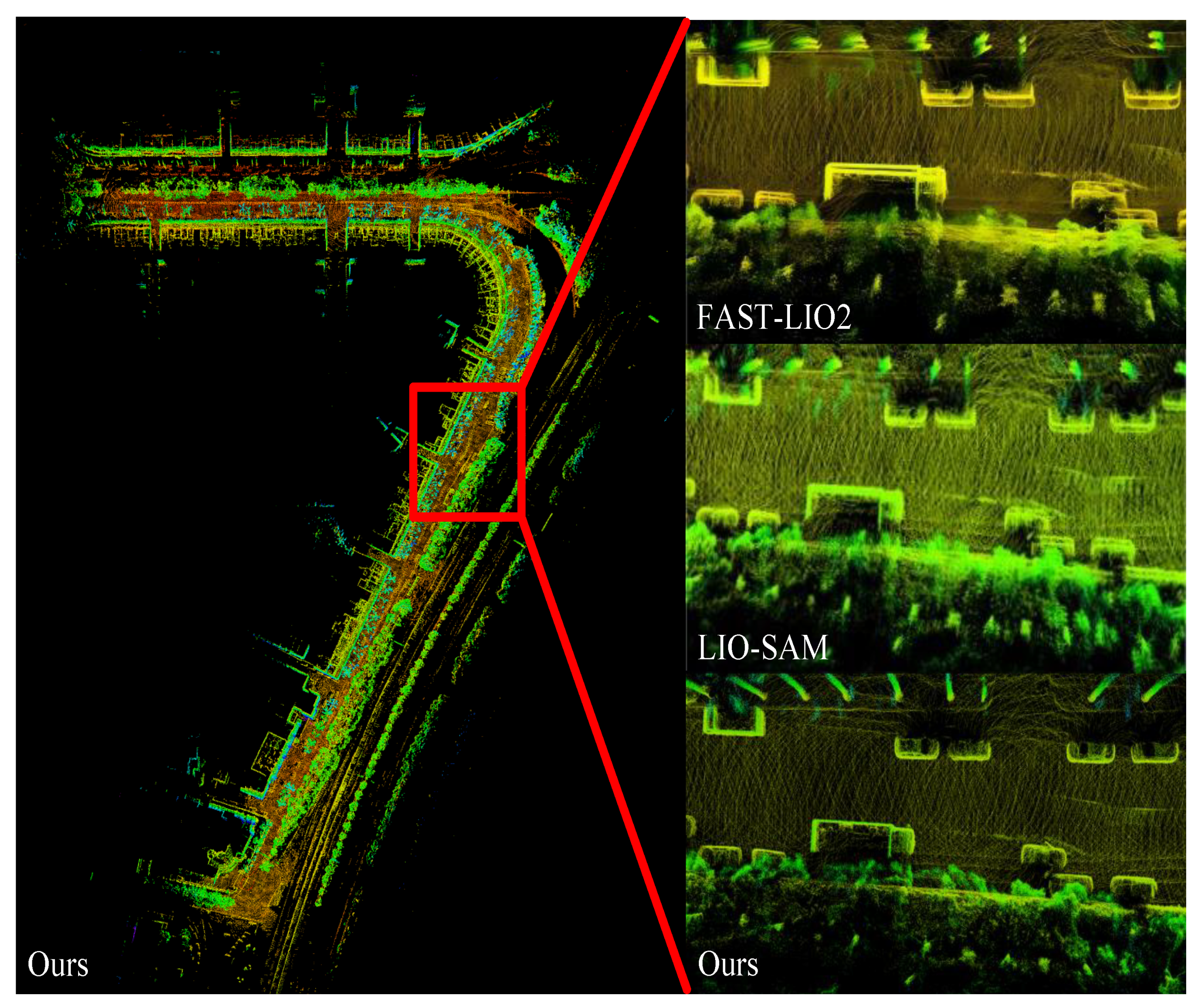
Figure 8.
Runtime of BA-CLM on sequence 02 of self-collected dataset. The peaks correspond to the global map optimization.
Figure 8.
Runtime of BA-CLM on sequence 02 of self-collected dataset. The peaks correspond to the global map optimization.
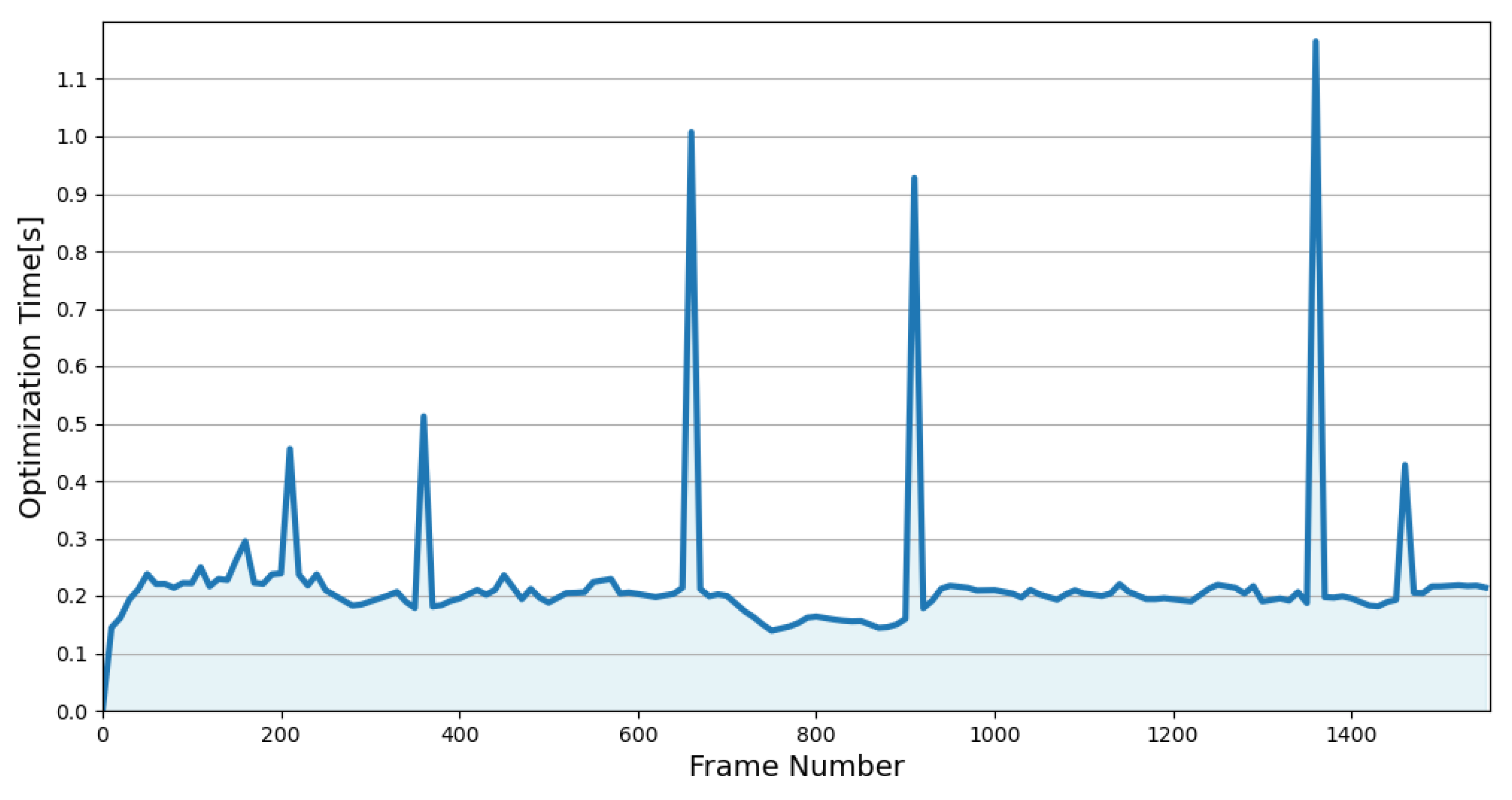

Table 1.
Root mean square errors (RMSEs) of absolute trajectory error (ATE) [m] on public datasets.
| Sequence | Length [m] | BA-CLM | Faster-LIO | FAST-LIO2 | LIO-SAM | BALM2 | HBA | A-LOAM |
|---|---|---|---|---|---|---|---|---|
| M2DGR-S02* | 1484.621 | 1.823 | 2.666 | 2.323 | 4.063 | 2.012 | 1.742 | 5.299 |
| M2DGR-S03 | 423.911 | 0.118 | 0.498 | 0.198 | 0.192 | 0.249 | 0.143 | 0.586 |
| M2DGR-S04 | 840.433 | 0.225 | 1.182 | 0.443 | 1.022 | 0.525 | 0.439 | 2.337 |
| M2DGR-S05* | 420.560 | 0.295 | 1.182 | 0.378 | 1.022 | 0.601 | 0.278 | 1.364 |
| M2DGR-S06* | 479.630 | 0.384 | 0.457 | 0.413 | 0.417 | 0.397 | 0.400 | 0.682 |
| M2DGR-S07* | 1104.068 | 10.772 | 11.736 | 11.751 | 28.642 | 11.851 | 9.899 | 28.940 |
| KITTI00 | 3724.187 | 1.227 | 4.602 | 3.851 | 8.017 | 2.732 | 1.557 | 19.417 |
| KITTI04* | 393.645 | 0.361 | 0.752 | 0.555 | 0.743 | 0.633 | 0.565 | 0.593 |
| KITTI06 | 1232.876 | 0.272 | 1.044 | 1.296 | 0.872 | 0.677 | 0.532 | 1.189 |
| KITTI07 | 694.697 | 0.935 | 1.456 | 0.883 | 0.639 | 0.623 | 0.548 | 1.301 |
* The optimal results are marked in red, and the suboptimal results are marked in blue.
Table 2.
RMSEs of ATE [m] on the NCLT dataset.
| Sequence | Length [m] | BA-CLM | Faster-LIO |
|---|---|---|---|
| 20120429 | 1.268 | ||
| 20120511 | 2.299 | ||
| 20120615 | 1.863 | ||
| 20130110 | 0.966 | ||
| average [%] | 0.052% | ||
Table 3.
Average mean map entropy (MME) ( m) on the self-collected dataset.
| Sequence | Length [m] | BA-CLM | FAST-LIO2 | LIO-SAM |
|---|---|---|---|---|
| 01 | -1.767 | |||
| 02 | -1.824 | |||
| 03 | -2.113 |
Table 4.
Runtime of BA-CLM on 32-line LiDAR datasets.
| Step | Time Cost[] |
|---|---|
| Voxel Map Construction | |
| Planar Point Extraction | |
| LBA Cost Calculation | |
| Local Map Optimization | |
| Voxel Map Update | |
| Global Map Optimization | |
| Average Time Per Frame |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



