
Submitted:
15 July 2024
Posted:
16 July 2024
You are already at the latest version
Abstract
Elderly individuals frequently perceive companion robots devoid of warmth, resulting in a reluctance to accept these robots' services. This perception has become a significant barrier to the introduction of companion robots into households. To address this issue, this study employs KE methods to translate the elderly's need for warmth perception from companion robots into elements of modelling design. Initially, 20 pairs of affective words and 22 sample images of companion robots were chosen. The "rational-emotional" and "dim-bright" dimensions were identified as positively influencing the elderly's warmth perception of companion robots through SD method analysis. Subsequently, a hierarchical analysis table was established, with warmth perception as the root layer, modelling style and color matching as the basic layer, "rational-emotional" and "dim-bright" as the expansion layer, and the eight characteristic elements of companion robots as the morphological layer. The link between affective imagery and design elements was then established from the sample robots with higher warmth perception scores. Based on the correlation between the two, various design schemes were formed through random combinations. Finally, the design schemes were evaluated using the warmth perception scale, and the warmth perception scores of each sample model were obtained. This research provides design references for designing companion robots for the elderly with a "sense of warmth".
Keywords:
Warmth perception
; styling design
; Kansei Engineering
; Elderly Companion Robots
1. Introduction
Population aging is a global trend. According to the 2023 World Social Report, the global population aged 65 and above was 761 million in 2021. This number is projected to reach 1.6 billion by 2050 [1]. Currently, the dependency ratio of the elderly population over 65 years old in China is only 21.8%, indicating that a large portion of the elderly population is not receiving adequate care and affection. The emergence of companion robots offers a potential solution to meet the emotional needs of the elderly. However, the companion robots currently available on the market are still in a relatively early stage, particularly in terms of modelling design, leaving a cold and rigid impression on the elderly and not being accepted by them. Therefore, the design of a companion robot model with a sense of warmth is of particular importance.
Warmth perception is one of the two dimensions of the stereotype content model, proposed by American psychologist Fiske and others in the 1990s, and the other dimension is competence perception [2]. Things with high warmth perception make people feel close and give a positive image, and are more easily accepted than things with low warmth. Although warmth perception and competence perception both appear when people encounter a new thing, compared with competence perception, warmth perception has a priority effect. Because of this characteristic, warmth perception can be applied to the field of design as the goal of design.
This paper focuses on how to design a companion robot model that can leave a high warmth impression on the elderly, and transform affective imagery into design elements. We developed a Kansei imagery vocabulary and a sample image library, then obtained data through expert evaluations and questionnaire surveys. We further performed multiple linear regression analysis to explore the relationship between Kansei imagery and warmth perception, transforming impactful Kansei imagery into corresponding design elements. Finally, a modeling design was developed through random combination of these design elements.
2. Current Research Status in China and Abroad
2.1. Kansei Engineering and SD Method
Kansei Engineering originated in Japan, and its core idea is to transform the previously unquantifiable, qualitatively expressed affective responses into rational data. In the 1980s, researchers from the Faculty of Engineering at Hiroshima University in Japan introduced affective analysis into the field of engineering research, studying how to transform affectivity into engineering technology in residential design. As a participant, Mitsuo Nagamachi keenly noticed that the "era of affectivity" was coming. Starting in 1989, he published a series of papers and works on Kansei Engineering, laying the foundation for the subsequent development of Kansei Engineering. The success of brands such as Mazda, Sharp, and Vini later validated the practical significance of Kansei Engineering.
In recent years, Kansei Engineering has been widely applied to various fields. Mitsuo Nagamachi (2007) explored the rules of the relationship between affectivity and design specifications, analyzing the design behavior characteristics of Kansei Engineering from the behavior of maximizing customer satisfaction with products [3]. Liu S F (2019) and others combined Kansei Engineering and fuzzy neural theory to conduct fuzzy analysis on the modeling design of Mazu's crown, providing a reference for the cultural and creative field [4].
The successful cases of Kansei Engineering have gradually expanded it to the field of robot modeling. Zhu Yan, Chen Gang (2016) extracted the head features of elderly care robots, constructed the mapping relationship between affective imagery and head features through BP neural network, and connected the BP neural network to design software to construct an auxiliary modeling design system [5]. Bi Yifei, Wang Nianwen, and Zhu Yiwu used Kansei Engineering as a support, drew intention scale maps through modeling, color, and material factors, and guided the modeling design of elderly companion robots [6]. Sun Yue, Wu Lei, Sheng Qinqin (2022) selected imagery words and typical samples to establish survey questionnaires, and used questionnaire data to train the BP neural network to predict affective imagery for the manufactured models [7].
The SD method refers to the Semantic Differential method, a psychological measurement method proposed by Osgood in 1957. This method uses "words" in semantics as a scale for psychological experiments to quantitatively describe the concepts and constructs of the research object. Kansei Engineering often uses the SD method for semantic measurement.
2.2. Current Research Status of Companion Robot Modeling Style
The development of companion robots is currently in an experimental phase, with anthropomorphic design being a significant area of interest in the field of intelligent robot research. However, the Uncanny Valley theory, proposed by Professor Mori Masahiro of Japan in 1970, suggests that when a robot's appearance is too human-like, it can induce discomfort, which intensifies as the similarity increases [8]. Bryant C D (2012) and others have discovered that robots resembling women and children are more appealing to humans [9]. Yogeeswaran K (2016) and others have investigated the interaction mechanism between the degree of anthropomorphism in robot appearance and human perception of robot capability threats [10].
In China, some scholars have utilized Kansei Engineering to analyze the emotional imagery of the elderly and link it with the design elements of companion robots, providing guidance for their design. Wang Qiuhui (2021) and others have explored the visual cognition differences of different age groups towards cold, warm, black, and white colors, finding that the elderly pay the most attention to the color black, with white being the least recognizable [11].
3. Analysis of the Elderly User Group's Needs
3.1. Physiological Characteristics of Elderly Users
As people age, their physical fitness gradually changes, showing a trend of rising and then falling, and this decline accelerates with increasing age. It can be summarized in the following three aspects.
(1)Cognitive decline: As age increases, the number of brain cells in the elderly decreases, leading to a decrease in their speed of processing various information. Simultaneously, their ability to suppress irrelevant information in the neural encoding process is impaired.
(2)Perceptual weakening: The sensory functions of the elderly gradually decline with age and diseases, with vision and hearing being particularly affected.
(3)Physiological decline: The physiological and immune functions of the elderly gradually decline, leading to a weakening of the functions of various body systems, thereby affecting physical health and state.
The decline in cognitive and perceptual abilities makes it harder for elderly people to accept new things. This means that the impression a product makes on them will influence their decision to accept it. It also underscores the necessity of leaving a warm and positive impression on elderly individuals.
3.2. Psychological Characteristics of Elderly Users
The psychological characteristics of elderly people change with their physiological traits and social status, primarily manifesting in the following three aspects.
(1)Decline in self-identity: The rapid development of society generates a large amount of information, causing elderly people with declining cognitive abilities to experience self-doubt. Retirement leads to a lack of a sense of accomplishment, and declining physiological traits result in poorer health conditions.
(2)Sense of loneliness: With a significant increase in free time but no suitable ways to fill it, elderly people experience feelings of loneliness and emptiness, leading to a sense of isolation.
(3)Inferiority and sensitivity: The deterioration of cognitive and perceptual abilities prevents elderly people from quickly accepting new things, causing them to gradually become disconnected from society.
3.3. Analysis of Emotional Needs of Elderly Users
We developed a typical user profile based on the physiological and psychological characteristics of the user group, along with specific examples. A typical user profile is shown in Table 1.
As shown in the figure above, Mr. Wang's monthly retirement income is RMB 5000, which can meet his basic material, physiological, and safety needs. As the physical functions of the elderly decline with age, they gradually lack sufficient energy to participate in various activities, and instead crave companionship from the outside world. Therefore, the needs of the elderly are mainly reflected in the need for emotional companionship.
4. Transformation of Affective Imagery into Design Elements
Kansei Engineering discusses the relationship between emotional elements and design elements based on engineering, quantitatively represents the feelings (affective imagery) that people have towards objects, and forms a connection with the design elements of the product, thereby designing products that meet emotional needs. This study relies on the method of Kansei Engineering to transform the affective imagery of the surveyed users towards companion robots into design elements.
4.1. Selection and Extraction of Affective Vocabulary
Affective imagery is the feeling that people form towards objects, and is the subjective feeling that consumers generate from the various visual presentations of the product. Based on this characteristic, affective imagery is selected in combination with user needs, and semantic differential scales are used to perform affective evaluations on sample images. Through data analysis, the correlation between affective imagery and robot design elements is obtained, providing guidance for design.
Zuobin and others used six adjectives to summarize the perception of warmth: friendly, well-intentioned, trustworthy, enthusiastic, gentle, sincere [12]. The semantic distinctions of these six adjectives are small and cannot effectively transform affective imagery into design elements. Therefore, the affective imagery vocabulary is recollected based on the styling elements of elderly companion robots.
Styling elements can be divided into three aspects: styling style, color matching, and material texture. By reading related literature, industry research reports, related news, and online platforms, a total of 103 pairs of related affective imagery vocabulary were collected. Subsequently, the collected affective imagery vocabulary was screened, semantically repetitive or similar vocabulary was eliminated, and difficult-to-understand affective imagery vocabulary was transformed, with a final retention of 20 pairs of vocabulary, as shown in Table 2.
To further refine the emotional imagery vocabulary that significantly influences the warmth perception of the elderly, ten experts, including Masters and PhDs engaged in design teaching, were invited to complete an online questionnaire. The expert information is presented in Table 3.
The expert evaluation questionnaire was presented in the form of a five-point scale, as shown in Appendix 1. The experts made judgments based on the emotional imagery vocabulary between "very inconsistent" and "very consistent", where 1, 2, 3, 4, 5 respectively represent "very inconsistent", "somewhat inconsistent", "neutral", "somewhat consistent", "very consistent". After collecting the questionnaires, we performed cumulative averaging on the data. The result is shown in Figure 1.
Combining the styling elements and the average score, the final five groups of vocabulary selected were: Rugged—Rounded (4.20), Rational—Emotional (4.10), Light—Heavy (3.80), Dim—Bright (3.80), Plastic—Metallic (3.70). Table 4 shows the list of selected vocabulary.
4.2. Selection of Typical Samples
To facilitate the collection and selection of subsequent samples, the form of the companion robot is divided into two categories: humanoid robots and doll-type robots. Through the internet, magazines, literature, e-commerce platforms, and other methods, 35 humanoid robot samples and 20 doll-type robot samples were collected. After preliminary screening of the samples, those that were unclear or had high feature redundancy were eliminated, resulting in 22 sample images, as shown in Table 5.
The above sample images were then evaluated by experts. The experts made judgments based on the emotional imagery vocabulary between "very inconsistent" and "very consistent", where 1, 2, 3, 4, 5 respectively represent "very inconsistent", "somewhat inconsistent", "neutral", "somewhat consistent", "very consistent". After collecting the questionnaires, we performed cumulative averaging on the data. The result is shown in Figure 2.
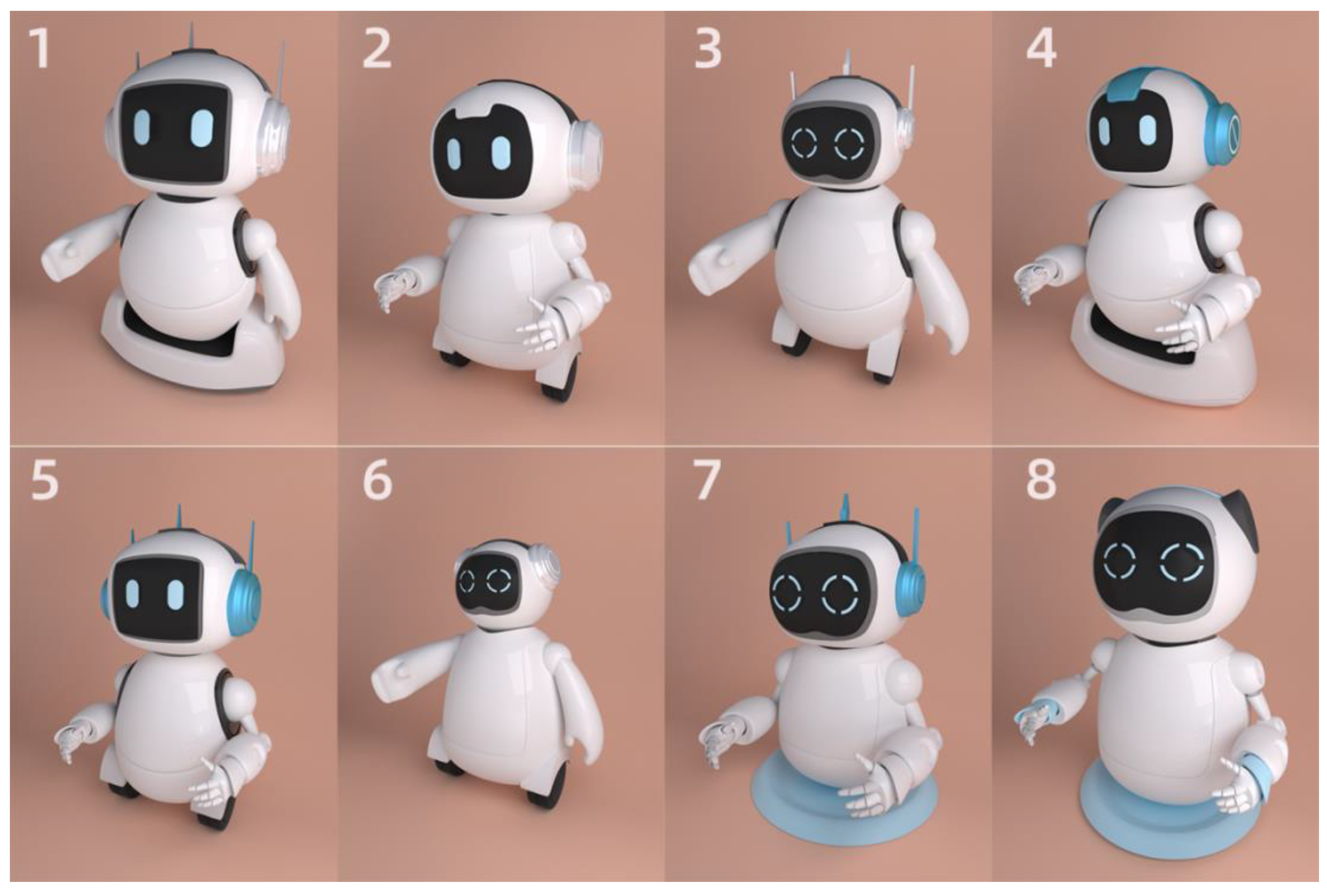
Finally, the top eight samples with the highest average scores were selected as the sample images for the experiment, as shown in Figure 3.
4.3. Questionnaire Survey
4.3.1. Questionnaire Design
The purpose of this survey is to establish a connection between emotional imagery and design elements. The questionnaire was designed using a Likert five-point scale and the Semantic Differential Method (SD). The five groups of emotional imagery vocabulary and eight sample images have been determined. The five groups of emotional imagery vocabulary were used as the imagery evaluation indicators, and on this basis, the option "Cold—Warm" was added as a basis for judging the warmth perception level of the elderly towards the elderly companion robot. The questionnaire options are shown in Table 6.
Taking the first group of emotional imagery vocabulary (Rugged—Rounded) as an example: If a smiley face sample image generates a feeling of "very rugged" in the subject's mind, two smiley faces represent "rugged", three smiley faces represent "neither rugged nor rounded", four smiley faces represent "rounded", and five smiley faces represent "very rounded". The score of three smiley faces is set to 0.
4.3.2. Survey Subjects and Location
The subject of the study is the elderly. Survey analysis shows that this group has a low proficiency in using smart devices, which means that it is not feasible to distribute questionnaires through online platforms, so offline questionnaire surveys were adopted. Based on a comprehensive consideration of the behavior characteristics of the survey subjects, the final experimental locations were determined to be nearby communities, parks, and senior service centers.
4.3.3. Survey Process
The elderly were shown eight sample images, and they were asked to choose their emotional inclination towards the sample images according to the questionnaire rules mentioned above. A total of 25 valid questionnaires were collected. The experiment process is shown in Figure 4.
4.4. Data Analysis
4.4.1. Calculation of Mean via Accumulation Method
In the phase of the questionnaire experiment, participants are asked to perform sensory evaluations for all samples. As a result, each sample yields 25 sets of sensory evaluation scores. The mean of these scores is calculated using the accumulation method, providing a depiction of the sensory evaluations of the samples as shown in Table 7.
The result shows that the samples with the highest scores in the dimensions of Rugged—Smooth, Rational—Emotional, Light—Heavy, Dim—Bright, Plastic—Metallic, Cold—Warm are respectively B, E, A, H, H, E (as illustrated in Figure 3).
4.4.2. Multivariate Linear Regression Analysis
(1) Multivariate Linear Regression Model
The multivariate linear regression model is a statistical analysis method that can effectively explain the fluctuations in the dependent variable, quantify the influence of independent variables through regression coefficients, offer interpretation and prediction capabilities for independent variables, and thus provide decision support. The formula is as follows:
(2) Data Analysis
Each sample yields 25 sets of sensory evaluation scores, thus producing 200 sets of data. This data is imported into SPSSAU for analysis, with the results displayed in Table 8.
Analytical results shows that the VIF of the five sensory imageries are all less than 5, confirming that there is no collinearity. Simultaneously, the D-W value is around 2, suggesting that there is no autocorrelation between the sensory imageries, and the model is robust.
The model R2 is 0.6, which implies that "rugged—smooth", "rational—emotional", "light—heavy", "dim—bright", "plastic—metallic" can explain 60.0% of the variations in "cold—warm". The regression coefficient values of the independent variables are 0.062, 0.469, 0.009, 0.156, -0.051 respectively. The p-values of "rational—emotional” and "dim—bright" are both less than 0.01, indicating that these two sensory imageries significantly impact "cold—warm".
The multivariate linear regression formula, derived from the table, is as follows:
where y represents the warmth perception score, x1 represents "rugged—smooth", x2 represents "rational—emotional", x3 represents "light—heavy", x4 represents "dim—bright", x5 represents "plastic—metallic".
y=3.591 + 0.062*x1 + 0.469*x2 + 0.009*x3 + 0.156*x4-0.051*x5
4.5. Extraction and Combination of Design Elements
Combining the questionnaire survey and literature analysis, we analyzed the morphological elements of doll-type robots. Sample E, which has the highest warmth perception, was used as an example for morphological analysis. The analysis included eight characteristic elements: head shape, facial features, ear shape, arms, bottom, head-to-body ratio, color scheme, and brightness, as shown in Figure 5.
We analyzed the design features of each product from two dimensions: "rational—emotional" and " dim—bright", to identify the design elements that best capture the emotional imagery.
- (1)
- Rational—Emotional: Results in Table 7 show the three highest-scoring samples in this dimension are E, D, and F. When analyzed in conjunction with the characteristic elements of elderly companion robots, it can be inferred that the robots in the higher-scoring samples tend to have more rounded head shapes and often feature freely movable arms. Regarding the base shape, designs with wheels and trays tend to score higher.
- (2)
- Dim—Bright: Results in Table 7 show that the three highest-scoring samples in this dimension are H, B, and D. This emotional imagery vocabulary falls under the category of color combinations. In the color combinations of the three higher-scoring samples, white is prominently featured. Consequently, the brightness of the white portion is used as the benchmark for determining the overall brightness. Analyzing from the HSB color mode, color is divided into hue, saturation, and brightness modes. The brightness mode is expressed in percentage values. By importing the sample images into Photoshop software and using the eyedropper tool to pick colors from the head, body, and base of each sample, then averaging the results, it was found that the brightness of H is 88%, B is 90%, and D is 80%. The difference between sample H and sample B is 2%, which is negligible to the naked eye, hence they are combined and treated as 89%.
This research focused on the design elements from the perspective of warmth perception, which serves as the root layer. Through multiple linear regression, it was found that the emotional imagery related to material texture—metallic vs. plastic—does not significantly impact warmth perception. Therefore, we identified styling style and color matching as the basic layer, the dimensions of "rational—emotional" and "dim—bright" as the expanded layer, and the eight characteristic elements as the morphological layer. Using the robots with high warmth perception scores, we developed a hierarchical table to link emotional imagery with design elements, as shown in Table 9.
Based on the hierarchical analysis table, we randomly combined the design elements into eight schemes, and used these as a basis for designing the elderly companion robots. We further created three-view drawings using Photoshop, then used Cinema 4D version 23 for modeling. The final rendered images are shown in Figure 7.
Figure 6.
Design 1 Three-View Drawings.
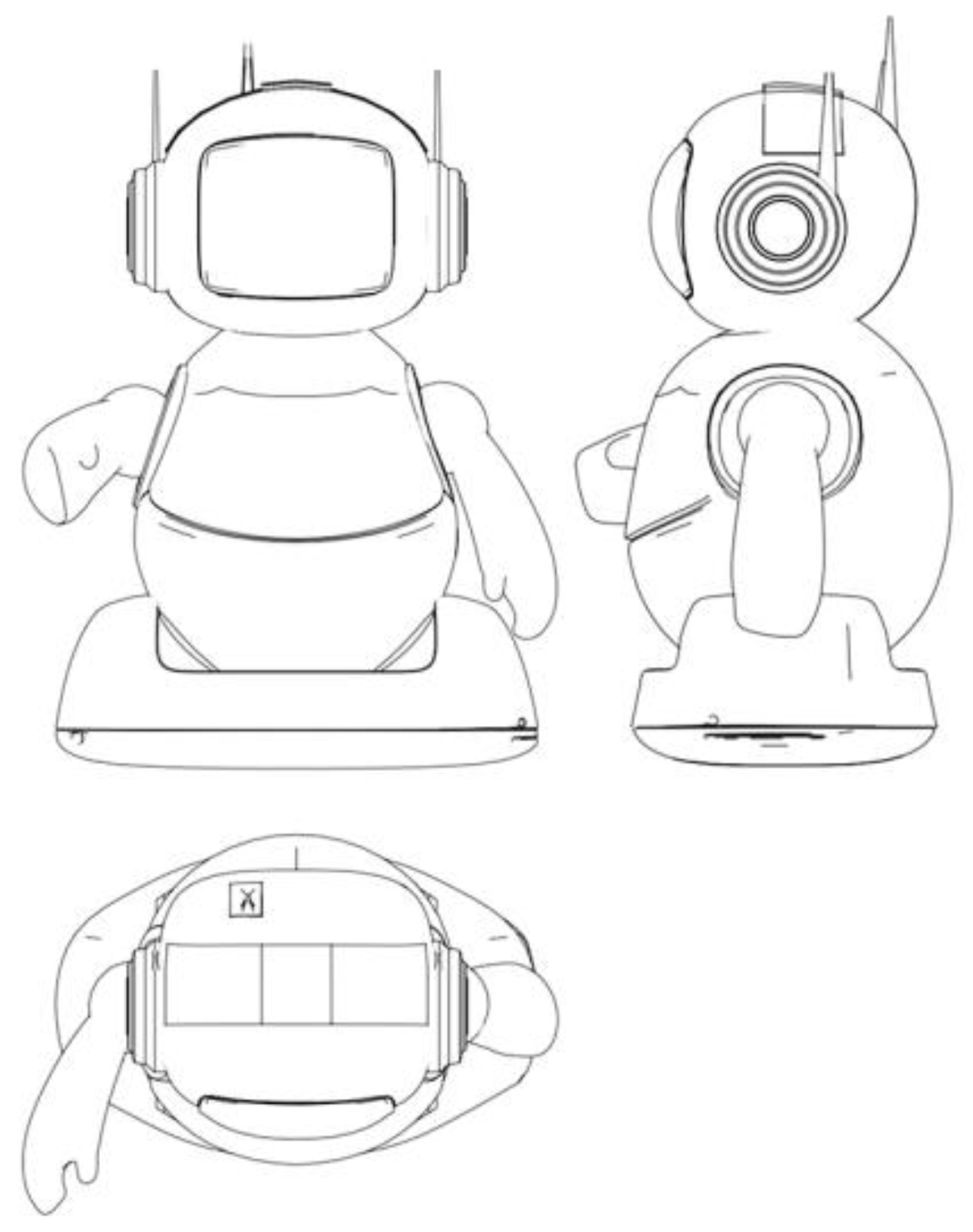
Figure 7.
Sample Images.
4.6. Warmth Perception Scale Survey
We selected elderly participants and conducted a questionnaire survey using the Warmth Perception Scale. The scale measures warmth perception across five dimensions: "friendly", "trustworthy", "enthusiastic", "gentle", and "sincere". The survey questionnaire evaluation results show that scheme x1 scored the highest. The rendering effect is shown in Figure 8.
5. Conclusion
This study focuses on the warmth perception of elderly people to design robots that meet their emotional companionship needs. The research first conducted a questionnaire survey to gather emotional vocabulary. Using multiple linear regression analysis, it was found that "rational—emotional" and "dim—bright" significantly impact warmth perception, whereas "rugged - smooth", "light—heavy", and " plastic - metallic" do not. The regression equation derived is as follows: y = 3.591 + 0.062x1 + 0.469x2 + 0.009x3 + 0.156x4 - 0.051*x5. In this equation, y represents "cold—warm", x1 represents " rugged—smooth", x2 represents "rational—emotional", x3 represents "light—heavy", x4 represents "dim—bright," and x5 represents "plastic—metallic".
By establishing the relationship between emotional imagery and design elements through Kansei Engineering, the study completed the transformation from emotional elements to design elements. This resulted in a set of companion robot designs with warmth perception. The warmth perception scale was used to verify the designs, identifying the robot design with the highest warmth perception for elderly companionship.
Author Contributions
QiLi, provides conceptualization, methodology, verification, data supervision, writing-review and editing, project management, and JiahuiZhang mainly completed writing-first draft preparation, calculation and analysis.
Funding
This research was funded by the NSSFC (National Social Science Fund in China), project approval number: 2022GS3356.
Data Availability Statement
The original contribution put forward in the research is included in the article/supplementary materials, and further inquiries can be directly consulted by the correspondent.
References
- United Nations Department of Economic and Social Affairs.2023 World Social Report: No one should be left behind in an aging world [R].2023.
- Fiske S T,Cuddy A J C,Glick P,et al.A model of (often mixed) stereotype content: Competence and warmth respectively follow from perceived status and competition[M]//Social cognition. Routledge, 2018: 162-214.
- Nagamachi, M. Kansei engineering[M]//Handbook of human factors and ergonomics methods. CRC Press,2004: 794-799.
- ShuoFang L,YuanChin H,HungCheng T.Development of a new cultural design process using Kansei engineering and fuzzy techniques A case study in Mazu crown design[J].International Journal of Clothing Science Technology,2019,31(5):663-684. [CrossRef]
- Zhu Yan,Chen Gang.Head Shape Design of Service Robots on Kansei Engineering and BP Neural Network[J].Packaging Engineering,2016,37(14):63-67. [CrossRef]
- Bi Yifei, Wang Nianwen, Zhu Yiwu.Form Design of Accompany Robot for the Elderly Based on Kansei Engineering[J].Packaging Engineering,2018,39(02):160-165. [CrossRef]
- Wu Lei,Sun Yue, Sheng Qinqi.Modeling Image of Aging Intelligent Companion Robot Based onBP Neural Network[J].Design Research,2023,13(04):5-8+13.
- Mori M,MacDorman K F,Kageki N.The uncanny valley [from the field][J]. IEEE Robotics & Automation Magazine,2012,19(2): 98-100. [CrossRef]
- Bryant C D,Forsyth C J. The complexity of deviant lifestyles[J]. Deviant behavior,2012,33(7): 525-549. [CrossRef]
- Yogeeswaran K,Złotowski J,Livingstone M,et al. The interactive effects of robot anthropomorphism and robot ability on perceived threat and support for robotics research[J]. Journal of Human-Robot Interaction,2016,5(2): 29-47.
- Wang Qiu-hui, Chen Wei.Visual Cognitive Performance of Color Design of Service Robot for the Elderly[J].Packaging Engineering,2021,42(24):175-180. [CrossRef]
- Zuo Bin, Zhang Yangyang, Zhao Ju, Wang Juan.The Stereotype Content Model and Its Researches[J].Advances in Psychological Science,2006(01):138-145.
Figure 1.
Sensory Imagery Expert Evaluation Result(The serial number of the horizontal axis is shown in Table 2).
Figure 1.
Sensory Imagery Expert Evaluation Result(The serial number of the horizontal axis is shown in Table 2).
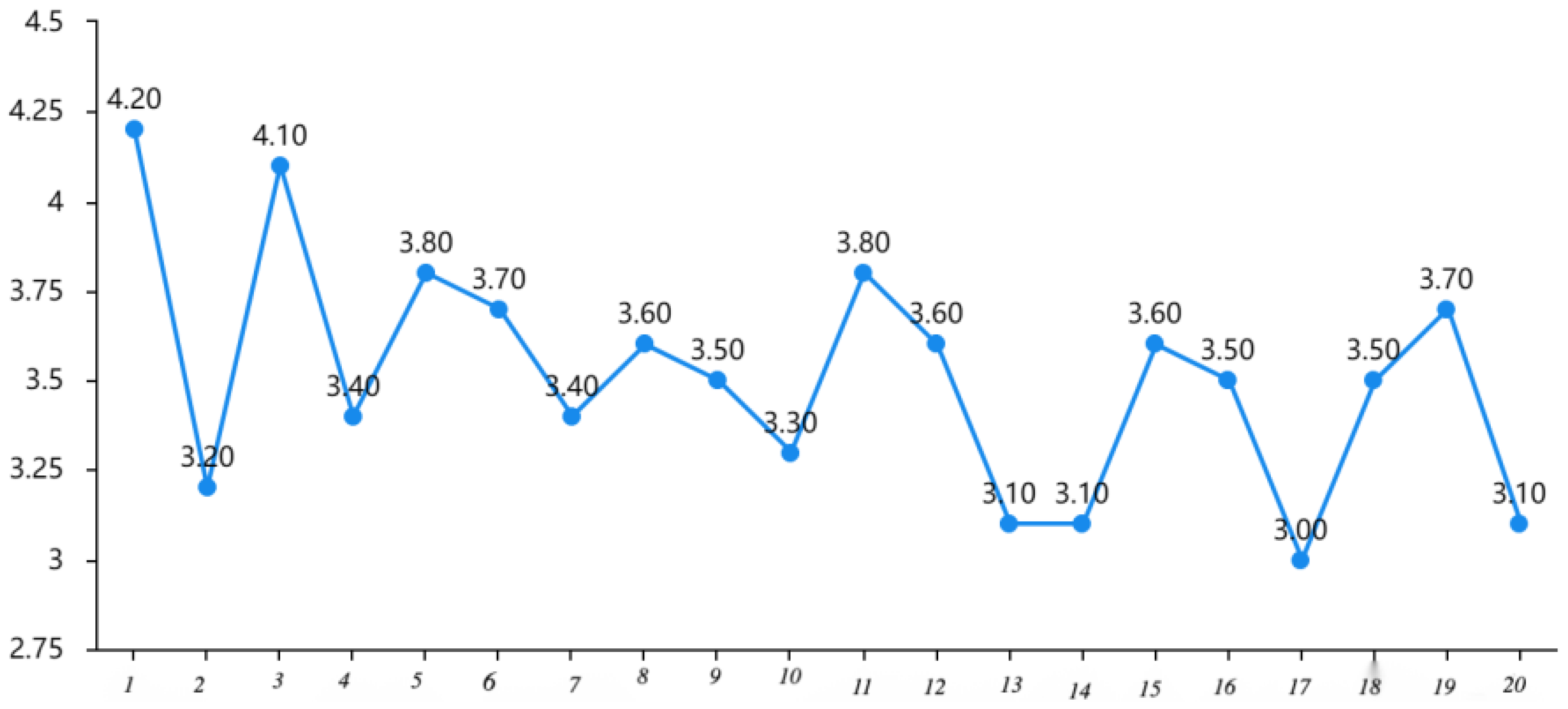
Figure 2.
Sample Image Expert Evaluation Average Score Line Chart.
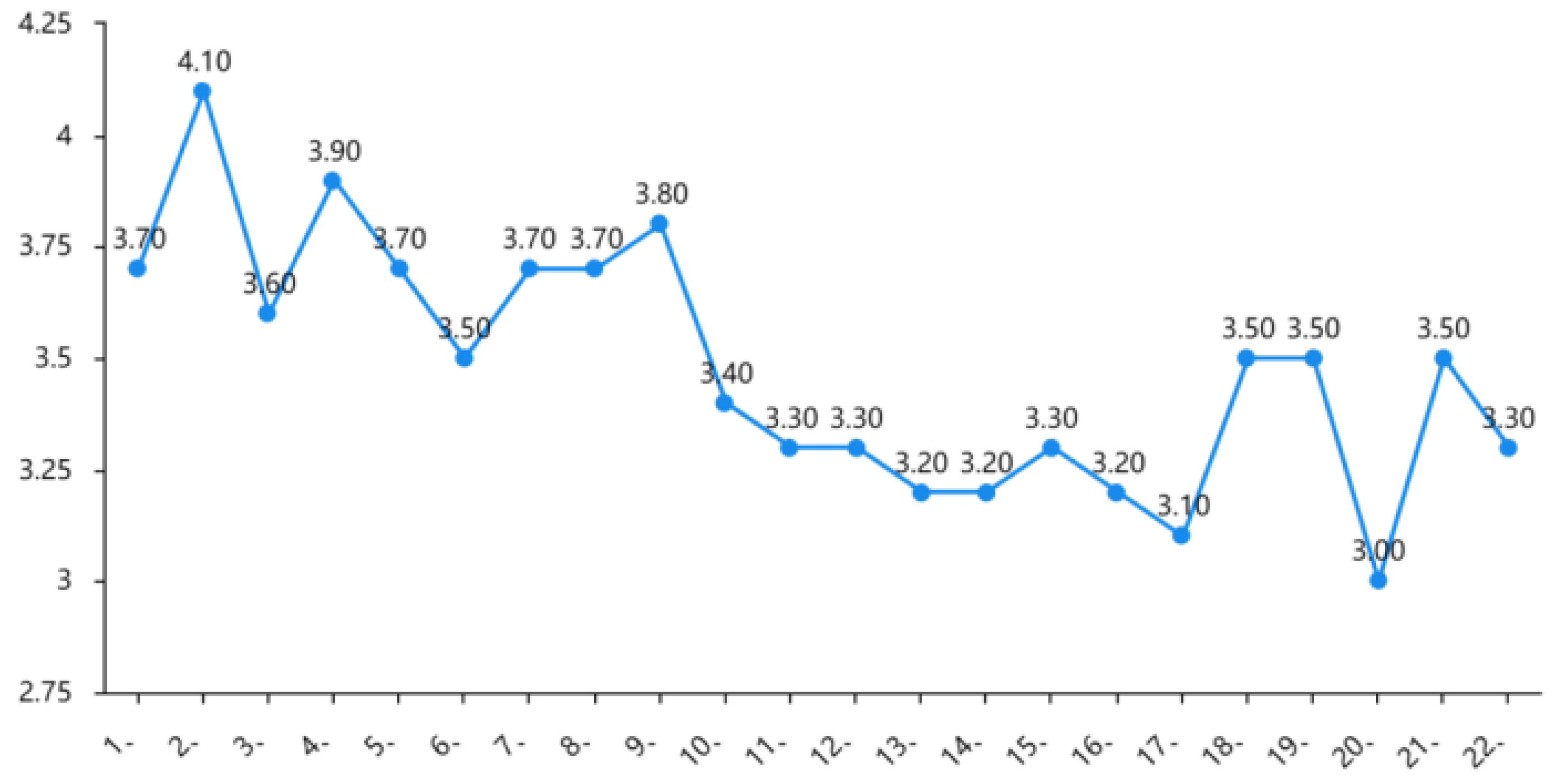
Figure 3.
Selected Sample Images.
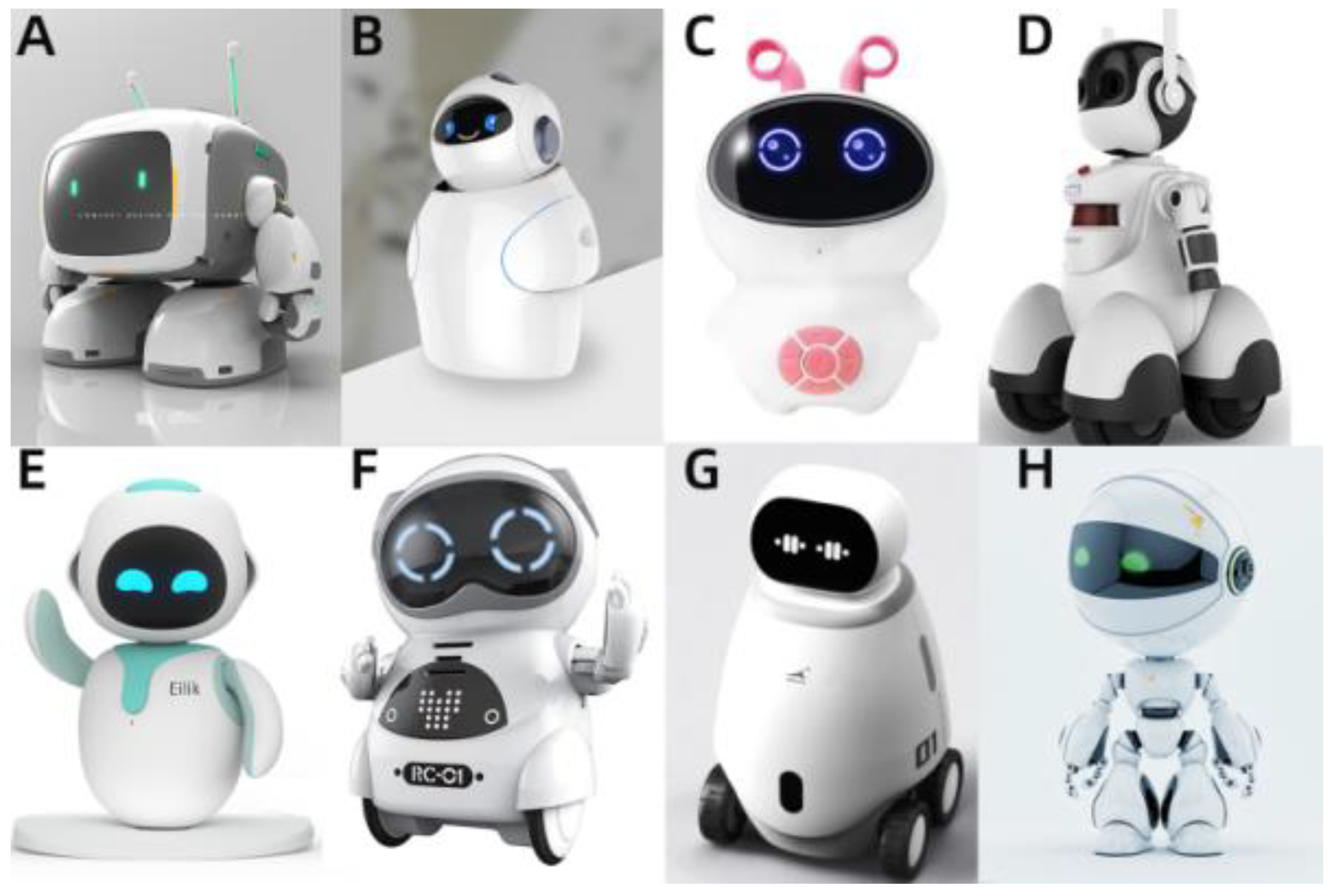
Figure 4.
Photo Record of the Questionnaire Process.

Figure 5.
Feature Elements of Elderly Companion Robot.
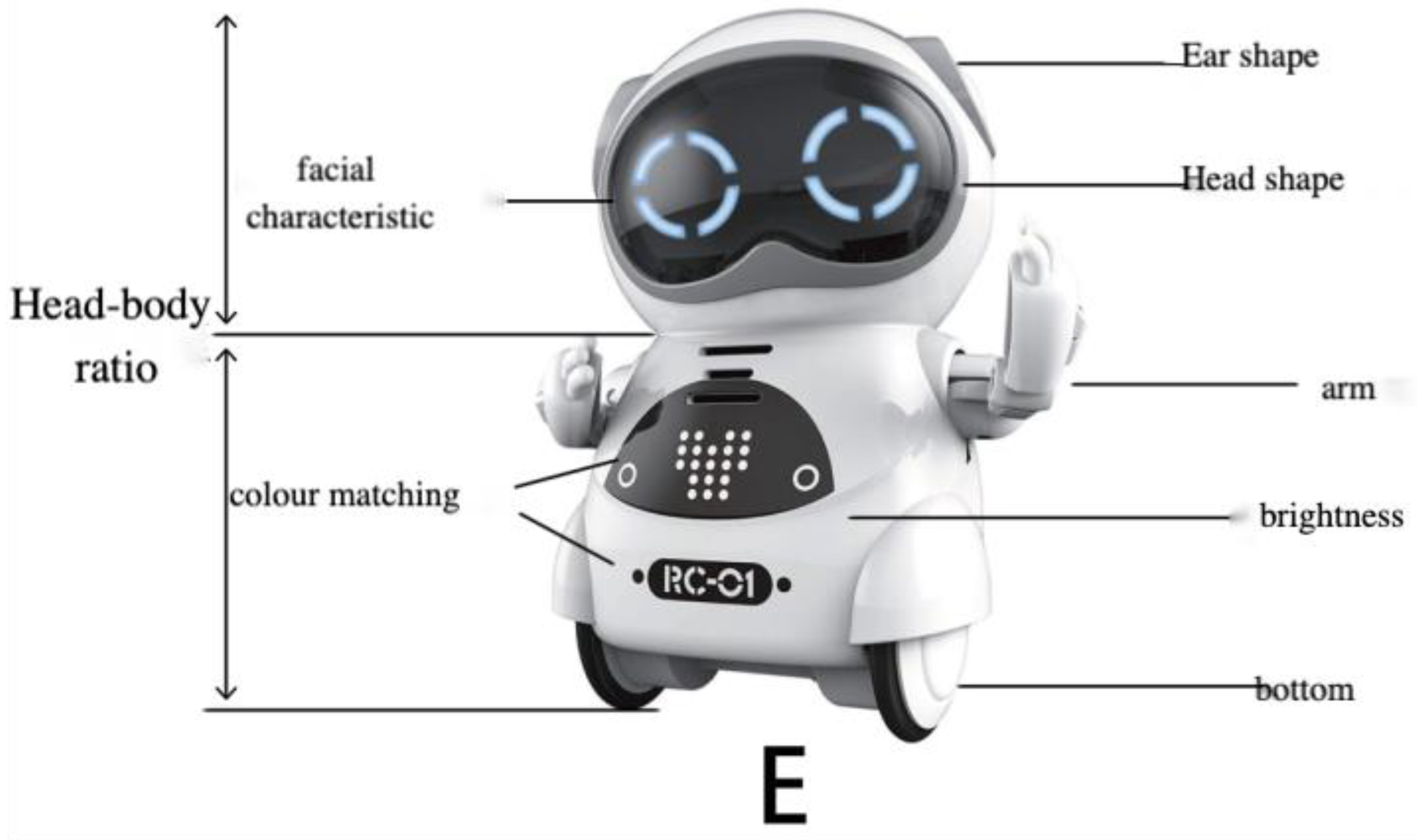
Figure 8.
Sample Image.
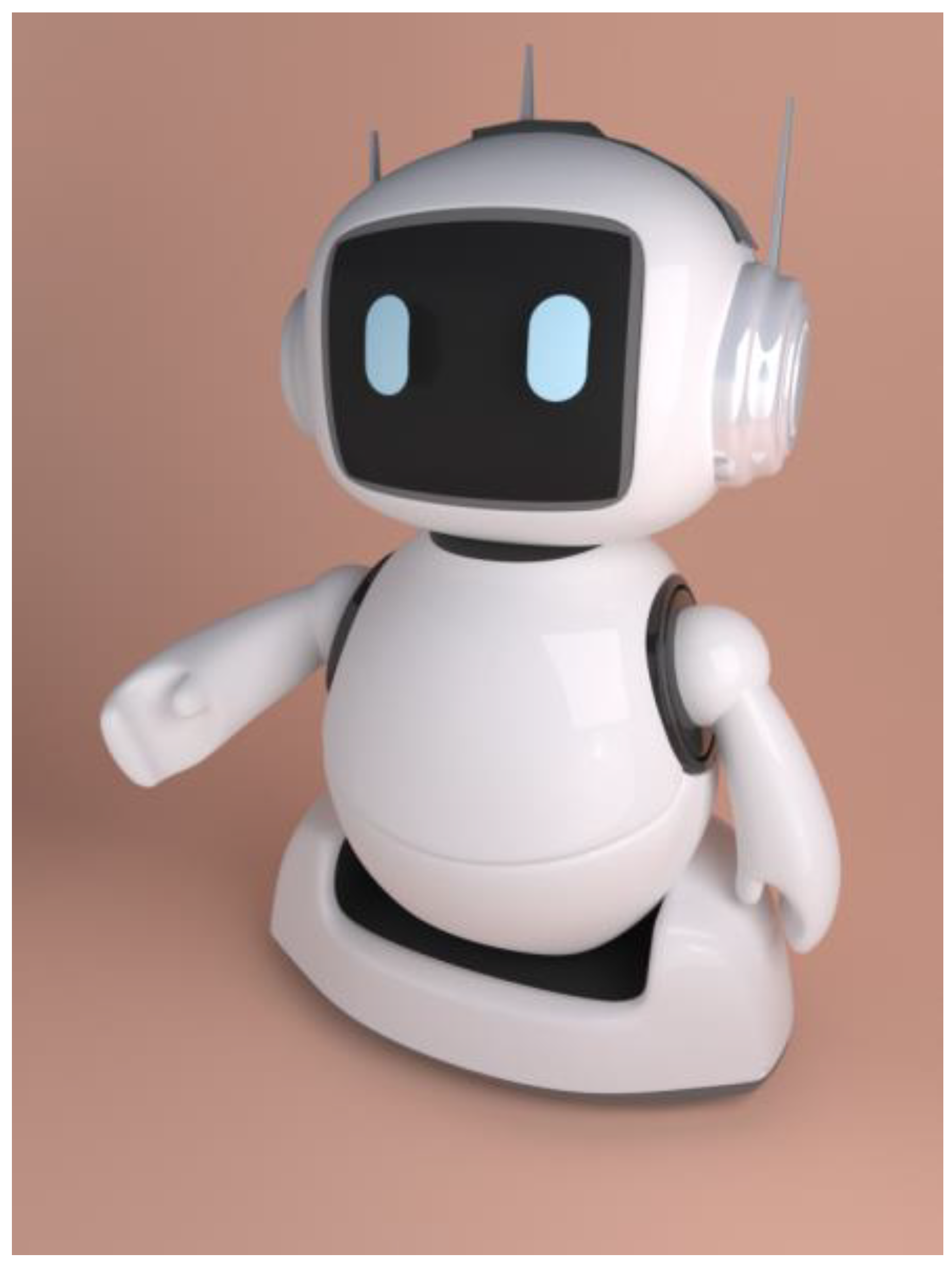

Table 1.
A Typical User Profile.
| Basic Information | Name: Mr. Wang; Age: 68 years old; Education: Junior high school graduate Household registration: Fuzhou Occupation: Retired employee of a state-owned enterprise Income: Monthly retirement pension of RMB 5000 |
| Family | He has a son and a daughter who work in other places and only come home during holidays. His wife passed away five years ago, and he lives alone. |
| Physiological Characteristics | Weak ability to accept new things, does not know how to use smart devices Vision declines due to age Physical strength gradually declines, can take care of himself, has mild hypertension |
| Psychological Characteristics | Feels that he has not kept up with the pace of the times, is not needed by others Lives a frugal and simple life, pays attention to health |
| Behavioral Habits | His hobbies are watching TV dramas and walking Does not use the internet, contacts friends and relatives by phone Likes to participate in activities at the park or community activity center near his home Mainly shops at supermarkets and farmers markets |
| Social Relations | Social circle is small, mainly interacting with old neighbors |
Table 2.
Affective Imagery Vocabulary Library for Elderly Companion Robot Styling.
| Affective Imagery Vocabulary | |||
|---|---|---|---|
| Styling Style | 1.Smooth—Rugged | 2.Grand—Petite | 3.Rational—Emotional |
| 4.Bold—Subtle | 5.Heavy—Light | 6.Full—Slim | |
| 7.Irregular—Symmetrical | 8.Dynamic—Static | 9.Avant-garde—Traditional | |
| 10.Lively—Stiff | |||
| Color Matching | 11.Bright—Dim | 12.Vivid—Elegant | 13.Blurry—Eye-catching |
| 14.Popular—Individualistic | 15.Ugly—Beautiful | ||
| Material Texture | 16.Artificial—Natural | 17.Durable—Easily damaged | 18.Smooth—Rough |
| 19.Metallic—Plastic | 20.Sturdy—Fragile | ||
Table 3.
Expert Information.
| Surname | Position | Education |
|---|---|---|
| Zhao | Teacher (Associate Professor) | PhD from Germany |
| Li | Teacher (Associate Professor) | PhD from Korea |
| Zhao | Teacher (Lecturer) | Master's Degree |
| Shang | Teacher (Lecturer) | PhD from Korea |
| Liu | Teacher (Lecturer) | Master's Degree |
| Chen | Teacher (Associate Professor) | Master's Degree |
| Wu | Teacher (Lecturer) | PhD from Korea |
| Zhang | Teacher (Professor) | PhD from Korea |
| Wen | Teacher (Professor) | PhD from Australia |
| Jiang | Teacher (Lecturer) | PhD from Korea |
Table 4.
Sensory Imagery Vocabulary for Elderly Companion Robot Styling.
| Imagery Vocabulary | |||
|---|---|---|---|
| Styling Style | Rugged—Smooth | Rational—Emotional | Light—Heavy |
| Color Matching | Dim—Bright | ||
| Material Texture | Plastic—Metallic | ||
Table 5.
Elderly Companion Robot Sample Image Library.
| Sample picture | |||||
|---|---|---|---|---|---|
| Doll type robot | 1.
|
2.
|
3.
|
4.
|
5.
|
6.
|
7.
|
8.
|
9.
|
10.
|
|
11.
|
12.
|
||||
| Humanoid robot | 13.
|
14.
|
15.
|
16.
|
17.
|
18.
|
19.
|
20.
|
21.
|
22.
|
|
Table 6.
Sensory Imagery Evaluation Form.
| Name: | Age: | Gender: | Sample: | ||||||
 | |||||||||
| Rugged |  |
|
|
|
|
Smooth | |||
| Rational | |
|
|
|
|
Emotional | |||
| Light | |
|
|
|
|
Heavy | |||
| Dim | |
|
|
|
|
Bright | |||
| Plastic | |
|
|
|
|
Metallic | |||
| Cold | |
|
|
|
|
Warm | |||
Table 7.
Mean Sensory Imagery Evaluation of Elderly Companion Robot Samples.
| Sample | Rugged - Smooth | Rational - Emotional | Light - Heavy | Dim - Bright | Plastic - Metallic | Cold - Warm |
|---|---|---|---|---|---|---|
| A | -1.04 | 0.04 | 0.8 | 0 | -0.56 | 0.6 |
| B | 1.04 | 0.84 | -0.4 | 1.12 | -0.6 | 1.12 |
| C | 0.84 | 0.48 | 0.4 | 0.56 | -0.2 | 0.68 |
| D | 0.48 | 1.24 | 0.32 | 0.92 | -0.4 | 1.28 |
| E | 0.52 | 1.24 | -0.96 | 0.64 | -0.6 | 1.48 |
| F | 0.84 | 1.12 | 0.4 | 0.28 | 0.56 | 1.44 |
| G | 0.6 | 0.4 | -0.68 | 0.64 | 0.48 | 1 |
| H | -0.84 | -0.04 | -0.72 | 1.16 | 0.64 | 0.64 |
Table 8.
Linear Regression Analysis Results (n=200).
| Non-standardized Coefficients | Standardized Coefficients | t | p | Collinearity Diagnostics | |||
|---|---|---|---|---|---|---|---|
| B | Standard Error | Beta | VIF | Tolerance | |||
| Constant | 3.591 | 0.047 | - | 76.886 | 0.000** | - | - |
| Rugged—Smooth | 0.062 | 0.034 | 0.091 | 1.816 | 0.071 | 1.231 | 0.812 |
| Rational—Emotional | 0.469 | 0.037 | 0.656 | 12.810 | 0.000** | 1.275 | 0.785 |
| Light—Heavy | 0.009 | 0.033 | 0.013 | 0.288 | 0.774 | 1.011 | 0.990 |
| Dim—Bright | 0.156 | 0.039 | 0.188 | 4.011 | 0.000** | 1.070 | 0.935 |
| Plastic—Metallic | -0.051 | 0.030 | -0.078 | -1.698 | 0.091 | 1.025 | 0.976 |
| R2 | 0.600 | ||||||
| Adjusted R2 | 0.590 | ||||||
| F | F (5, 194)=58.258,p=0.000 | ||||||
| D-W Value | 1.830 | ||||||
| Dependent Variable: Cold—Warm | |||||||
Table 9.
Hierarchical Analysis Table.
| Root Layer | Basic Layer | Expanded Layer | Morphological Layer | Design Characteristics | Feeling |
|---|---|---|---|---|---|
| Warmth Perception | Styling Style | Rational—Emotional | Head Shape | Oval face | More like animal features |
| Square-round face | More human-like | ||||
| Facial Features | Square face | Increases simplicity | |||
| More facial curvature | Gives a smiling feel | ||||
| Ear Shape | Cat ear shape | Increases cuteness | |||
| Replaced with headphones | Adds fun | ||||
| Arms | Remove joint connections | Present as a whole | |||
| Retain mechanical arms | Smooth treatment locally | ||||
| Base | Replaced with tray | Increases stability | |||
| Wheeled structure | Increases flexibility | ||||
| Head-to-body ratio | 1:1, exaggerated | Exaggerated treatment | |||
| 1:1.2 | Cartoon-like treatment | ||||
| 1:1.8 | Increases similarity to humans | ||||
| Color Matching | Dim—Bright | Brightness | 80% | Ensures visual comfort | |
| 89% | Increases focus | ||||
| Color Combination | White-black | Increases simplicity | |||
| White-black-blue | Avoids color monotony |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



