Submitted:
28 June 2024
Posted:
29 June 2024
You are already at the latest version
Abstract
The maneuverability of ships is influenced by several factors, including ship design, size, propulsion system, hull shape, and external conditions such as wind, waves, and currents. The size, shape, and arrangement of the hull, rudder, and propeller are decisive for maneuverability. Hydrodynamic forces such as bank effect and squat significantly impact the maneuverability of large ships in narrow channels. With the increasing trend of building ever-larger ships, the demand to evaluate the maneuvering performance of the ship at the design stage has become more critical than ever. Both experimental and computational methods are used to obtain accurate maneuvering characteristics of vessels. In this study, the methods for predicting ship maneuvering characteristics are analyzed using a systematic review based on the preferred reporting items for systematic reviews and meta-analyses (PRISMA). This article contributes to a deeper understanding of the hydrodynamic capabilities of ships and identifies possible future challenges in the field of ship hydrodynamics. The findings inform educators and the shipping industry about the importance of predicting the maneuvering performance of ships, with an emphasis on the education and training of seafarers needed to make timely decisions in critical situations.
Keywords:
ship maneuverability
; shallow water
; hydrodynamic forces
; bank effect
; squat effect
1. Introduction
Ship maneuvering has been the subject of extensive research for many years, particularly regarding the influence of hydrodynamic forces. There is extensive literature on this subject, which demonstrates the importance of understanding and analysing the influence of these forces on ship maneuverability. The increasing size of ships, such as large tankers and large containers, has increased interest in researching the hydrodynamic performances of ships in confined waters. The increase in ship size is also accompanied by an increase in the operating speed of the ship, which is between 16 and 25 knots. While speed is not a priority for supertaskers with a capacity of 300,000 tons and more, which are no longer a rarity in shipping, it is crucial for container ships, which have reached a size of 400 meters and pose a challenge for Masters and pilots sailing in confined waters. Even before the Ever Given ran aground in the Suez Canal, some countries-initiated studies on the passage of large container ships through their ports, as port pilots were increasingly concerned about the maneuvering difficulties of such ships in increased wind conditions. A serious incident in the Suez Canal, crucial to global trade between Asia and Europe, led to a six-day canal blockade and caused enormous costs to the global economy. The grounding of the Ever Given in the Suez Canal has brought focus to the safety and maneuverability of large vessels operating in narrow channels and shallow waters. This incident led to an in-depth study of the ability of large vessels to navigate in confined waters and renewed focus of shipbuilders and researchers on improving safety measures and maneuverability predictions [1,2,3,4,5].
Determining the maneuvering characteristics of ships remains a very important research topic in marine hydrodynamics. To gain a better understanding of ship maneuvers and the predictability of maneuvering characteristics, both experimental and computational tools must be used, with continuous improvement of existing models and development of new ones. Given the current trends and challenges, ship designers and builders are using advanced computer simulation and modeling tools to develop more accurate and reliable mathematical models to optimize ship design and performance [6]. Since the maneuverability of ships is considered very important for safety and efficiency, the International Maritime Organization (IMO) has set stringent standards. As a result, there is a growing demand for assessments of a ship’s maneuverability early in the construction process [7]. The standards should be used to assess the maneuverability of ships and those responsible for the design, construction, repair, and operation of ships [8].
Research into the maneuverability of ships has been ongoing for decades. In the mid-20th century, mathematical models were developed to better understand the resistance and propulsion of ships, considering both existing and new designs. The need to develop mathematical models arose not only from the need to better understand maneuvering but also from the need to find appropriate mathematical tools to predict the maneuverability of ships. In the following years, as research in ship hydrodynamics progressed, mathematical models became increasingly important and contributed to improving the efficiency and safety of ships. With the construction of experimental tanks (towing tanks), new mathematical models were introduced to cover different types of ships. Sea tests in a towing tank focused on ships maneuvering in shallow and confined waters, and appropriate mathematical models were developed to predict ship performance under the influence of hydrodynamic forces. In parallel with the construction of the towing tank, the International Towing Tank Conference was established as a voluntary association of worldwide organizations whose goal is to predict a ship’s hydrodynamic performance based on physical and mathematical results obtained using models in the towing tank. This is particularly important for larger ships, where the influence of hydrodynamic forces can be more significant when sailing in confined waters [9].
The factors that affect a ship’s maneuverability can be characterized as a combination of external and internal factors. External factors depend on the area where the ship is sailing and cannot be controlled, while internal factors are related to the ship’s design and can be adapted to the sailing conditions. External factors include the influence of shallow water and interaction with other vessels or the shoreline and ship-ship/ship-shore interaction. Internal factors include speed, hull structure, propulsion, and rudder. Adjusting these two factors can reduce the negative effects of external disturbances [10]. Based on experimental results on the quality of course keeping, the ship remains stable in deep water but can lose stability in medium water depth when approaching shallow waters. Upon entering shallow waters, the ship becomes more stable again than in deep waters [11,12,13].
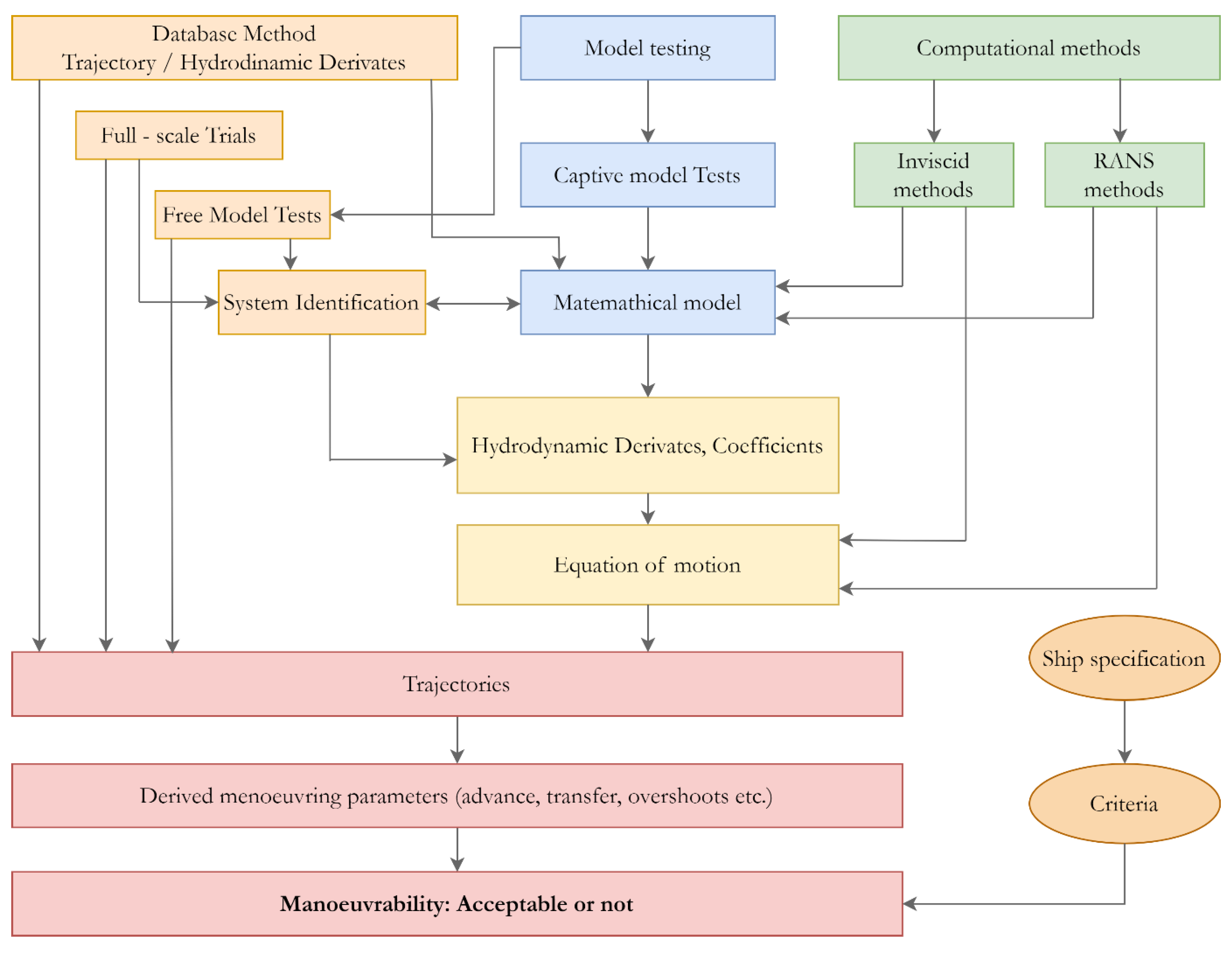
A hydrodynamic coefficient must be determined to predict the maneuvering motion of the ship. The methods used for this purpose are the captive model test, system identification techniques applied to the results of free-running model tests, and computational fluid dynamics (CFD). The methods are represented in Figure 1 [14,15,16].
The captive model test simulation is the most traditional and effective method for determining the hydrodynamic coefficient used in mathematical calculations to predict a ship’s maneuverability. In this test, a model of a particular type of ship is placed in a closed tank called a towing tank, and certain parameters are measured, such as the change in rudder deflection and the speed of the ship. The most common measurements in this closed environment relate to the design of harbors and channels and to ship-shore and ship-ship interactions [5,17]. The tests used for these measurements are the Rotating Arm Test (RAT) or the Circular Motion Test (CMT), and the Planar Motion Mechanism (PMM) test [18]. In the RAT or CMT test, a major static captive model test, the models are tested in the towing tank using a rotating arm to obtain the hydrodynamic values of the yaw velocity function, which takes place in the horizontal plane. The test can also be performed in the vertical plane to obtain pitch velocity values [17,19]. The PMM is a very common captive model test performed in the towing tank when the model has a drift angle with a straight flow. This steady-state test is called the Oblique Towing Test (OTT). In the dynamic test, the model is affected by forces of inertia. The information obtained from these tests includes damping coefficients, acceleration, and velocity [17,18,20]. The main PMM tests are pure drift, sway, and yaw.
System identification techniques are tools developed in control engineering to create mathematical models of dynamic systems from measured data. The maneuver coefficient is often based on experimental data. System identification techniques can be applied to the results of free-running model tests with a ship model in the towing tank [6,21].
There are three basic types of mathematical models for predicting ship maneuvering: the Abkowitz model, the Mathematical Maneuvering Modeling Group (MMG) model, and the Response model [6,22].
The Abkowitz model is a hydrodynamic model that contains the equations for longitudinal, lateral, and yaw motion from which hydrodynamic factors for ship maneuvering are derived [22]. The MMG model proposed by the Japanese Maneuvering Modeling Group (JMMG) considers the characteristics of the hull, rudder, and propeller forces and their interactions [23].
A Response or Nomoto model is a simplified model that includes the input of simple parameters, the rudder angle, and the system output, the yaw rate, of a maneuvering vessel as a dynamic system [24,25].
CFD simulations became popular with the advancement of computer capabilities. They analyze ship behavior in shallow waters, including ship-shore and ship-ship interactions. The results obtained with the CFD method are very reliable and provide a detailed picture of surface elevations and velocity/pressure fields, leading to a better understanding of the hydrodynamic phenomena of a ship maneuvering in shallow waters. CFD calculations are an alternative to physical methods because they provide reliable data at a much lower cost [26,27].
Mathematical models for ship maneuvering consider ship motion in six degrees of freedom (DOF) known as surge, sway, heave, roll, pitch, and yaw. In the past, mathematical models with only three degrees of freedom (3 DOF) have been used to study maneuvering in shallow waters. However, to account for the effects of rolling motion, a fourth DOF was later added to these models.
With the introduction of IMO regulations on maneuvering criteria under the influence of wind and waves, a more comprehensive approach became necessary. As a result, mathematical models with all six DOF became mandatory for ship maneuvering [6,28,29,30]. By using all six DOF, these updated mathematical models can effectively estimate the longitudinal forces, pitching forces, and yawing moments acting on the ship during maneuvering [31].
Harbor pilots and ship Masters take sinking and trimming very seriously, especially when navigating large ships in channels and ports with limited depth [32]. The hydrodynamic forces acting on a ship in shallow waters differ in many ways from those in open water. In shallow waters, the ship becomes sluggish, causing reduced steerability. The consequences are a lower response to the rudder angle, a larger turning diameter, smaller drift angles, and a lesser speed reduction when turning. The decisive pivot point for ship handling is the center of the forces acting on the ship. If the depth shifts from deep to shallow waters, this affects the pivot point by moving it backward, close to the ship’s center of gravity. Adjusting the pivot point affects the ship’s maneuvering characteristics. Given the reduced maneuverability in shallow waters, the vessel sails at a lower speed and reduced engine revolutions per minute (RPM) [33,34,35]. Other disturbance factors that make navigating in shallow waters more difficult are the varying depths and sudden changes in the current direction followed by high and low tides. When transiting in shallow waters, the waves generated by the ship, including the effects of waterbed friction, must be considered, as the ship’s wave resistance is present in shallow waters. The seabed also affects maneuverability, as the shallow water effect on large vessels is much stronger when the bottom consists of a muddy layer. All these factors must be considered before entering an area with shallow water. Continuous monitoring of the specified parameters is essential to be able to react in good time so that adjustments can be made in the event of any deviations [36,37,38]. Squat depends not only on the speed of the ship but also on the speed of the sea current passing around it. Squats can also occur when the ship is alongside if a strong current is present. In addition to squat, an unstable turning moment can occur when passing close to the bank or in the fairway due to the formation of waves in shallow water, which makes it difficult for the ship to maintain a stable course; this becomes increasingly apparent as the ship’s speed increases. Considering all these facts, shipping companies have introduced strict standard requirements for the minimum under-keel clearance and speed requirements in confined waters, which must be strictly adhered to by navigators to ensure safe navigation and protection of the environment.
In addition to the mathematical models used to calculate the ship’s maneuverability, special attention is given to port infrastructure and approach channels to accommodate large ships (PIANC). PIANC is a global organization working on this issue, providing guidance and technical advice on sustainable water transport infrastructure for ports, marinas, and waterways. The Maritime Navigation Commission, as the working group responsible for design guidelines for port access channels, is producing a PIANC report to review, update, and expand design recommendations for vertical and horizontal channels. As ship owners demand the testing of the maneuverability of vessels during the design phase, port authorities are also under pressure to provide deep enough approach channels for large vessels.
There are also canals and artificial waterways built for the passage of ships, where the strongest influence of geometric limits on sinkage and trim can be observed. At extremely shallow water levels, even the slightest change in the effective distance between the ship and the bottom of the fairway can have a significant impact on the behavior of the ship in the channel [39,40,41,42]. PIANC has also implemented an approach for selecting a group of seagoing vessels from the “IHS Sea-Web” database. The report contains the dimensions and characteristics of the vessels, categorized by size and type, with valuable data important for the planning and design of the port infrastructure that can accommodate the selected vessels [43].
This review article aims to provide a detailed look at the methods that have proven to be the best and most reliable in predicting ship maneuvering and to contributing to a better understanding of the problems associated with maneuvering ships in shallow waters and narrow channels. The results obtained with the methodology used in this article can be used in further research on mathematical models and other techniques for predicting the hydrodynamic coefficient when maneuvering a ship in confined waters. The information collected can be used to improve and enhance existing models to develop more efficient and accurate maneuvering prediction models. The guidelines of the preferred reporting items for systematic reviews and meta-analyzes (PRISMA 2020) were followed throughout the review process to ensure the required standard of the entire article review process [44].
2. Materials and Methods
In writing this article and reviewing the literature on predicting the maneuvering behavior of large ships in shallow waters and narrow channels, a comprehensive examination of the existing literature revealed various methods and studies in this area of research. To ensure that we cover all the methods used for our research, it was necessary to find a systematic and comprehensive research approach in the extensive literature on the hydrodynamic capability of the ship when navigating through shallow waters. To ensure high-quality standards in the review process, we have adopted the PRISMA guidelines for this article. Figure 2 shows the information flow according to the PRISMA methodology using four research steps, which is explained in more detail in the following sections.
Step 1: Identification of research studies—The analysis and data collection process began with a literature search of the articles for the desired study. Search engines such as Scopus, WOS, and Sci Direct were used as they cover a sufficiently wide range of scientific articles. The research strategy included Scopus & WOS as a large, multidisciplinary database of peer-reviewed literature: scientific journals, books, and conference proceedings. Sci Direct, on the other hand, as a third search engine, was included as we found a relatively large number of scientific papers, books, and conference papers related to research. As we found many articles in Sci Direct, we had to narrow down the search to focus on the most relevant articles to our research. When entering a specific term into search engines, it was found that the same terms kept coming up, so it was difficult to determine which search engine would dominate. The search strategy included the use of general terms such as:
- ship maneuvering,
- restricted waters,
- shallow water effect,
- squat,
- bank effect,
- ship hydrodynamics.
When using general keywords in combination with these terms, such as “ship maneuvering in shallow waters,” the accuracy of the search improved significantly. It helped identify many articles needed for the study. A total of 432 studies from all three databases were found (Figure 2). In Scopus, 201 (47%) studies were found; in WOS, 142 (33%); and in Sci Direct, 89 (21%) studies.
Step 2: Screening research studies—Screening the articles aimed to determine the number of articles relevant to our study, including a thorough search of them, and excluding articles inconsistent with the study, with retention rate 249/432 (58%). Screening included reading the title of the article, the abstract, and the conclusion and skimming the article’s content. The decision regarding reading the entire article depended on whether the article examined the maneuvering of large ships in narrow channels and shallow waters while also examining mathematical methods relevant to our study. In the screening phase, duplicate articles were identified and removed, and many of the relevant studies that were not accessible had to be excluded from the research.
Step 3: Eligibility assessment of research studies—In the process of acceptance of research studies, the articles were thoroughly analyzed, and the most important ones were selected for further processing. This was done according to certain criteria: Source of the article (whether it was published in a credible journal), importance of the content of the article (were there significant efforts to find innovative solutions), validity of the research method (whether a sensible and rational method was used and whether the conclusions were rational). Publications that do not deal with ship maneuvering and are irrelevant to maritime education were excluded from the analysis. Research studies we included in the analysis maintained a ratio of 89/183 (49%). This step is important to ensure the broadest possible perspective in the research analysis and sufficient material to conduct the bibliometric analysis.
Step 4: Research studies analysis—The final step included assessing selected studies analyzed in detail. Only these studies were used to obtain specific answers in the analysis process and combined within the methodology best suited to overview the maneuvering characteristics of the vessel when navigating in narrow channels and shallow waters.
Figure 3, created with the WOS viewer, illustrates the interweaving of the keyword “ship maneuvers in shallow waters” with the 30 most frequently used keywords in the Scopus research database. At the center of this network is “shallow water”,” which is closely linked to “water depth” and “maneuverability”,” underlining their importance in the field. The visualization shows clusters around numerical studies, model testing and the impact of physical geography such as “Shore Effect” and “Interaction”.
The research covers various aspects including hydrodynamic forces, confined water environments and waterway management. The color gradient shows the evolution of research trends from 2010 to 2016, reflecting the interdisciplinary and dynamic nature of studies to improve the safety and efficiency of vessel operations in shallow waters.
3. Results and Discussion
Bibliometric analysis considers studies by year of publication, leading countries, and leading authors. As seen in Figure 4, the publication of articles on ship maneuverability has increased significantly over the last ten years, particularly from 2009 onwards, where a sudden increase can be observed. This trend is closely related to the greater demand for the construction of large ships due to transportation costs. From 2009 to the present, a series of maritime accidents have occurred that we believe have indirectly encouraged scientists to increase the number of research articles investigating the hydrodynamic capabilities of ships. The stranding of the Costa Concordia in 2012 encouraged experts to pay more attention to the safety of ships during coastal navigation, which is reflected in the increasing number of articles in the following years. Looking at the maritime accidents of the last ten years, it can be seen that the groundings of container ships in confined waters have characterized this period. The grounding of the Maersk Shams in the Suez Canal in 2016, followed by the grounding of the Vasco de Gama in the Thorn Canal in 2016, pointed to the increasing problems of large and ultra large container ships navigating in shallow waters. The grounding of the Ever Given in the Suez Canal in 2021, which attracted public attention due to the week-long closure of the canal, was a sign to shipbuilders and scientists that they need to seriously consider the hydrodynamic capabilities of such vessels. Just one year later, in 2022, the Ever Forward ran aground in Chesapeake Bay. In Figure 4, we can see the increase in the number of articles related to the hydrodynamic predictions of ships. A common link in these cases is that they involve large or ultra large container ships that have run aground in narrow channels. The latest serious accident involving the container ship Dali in 2024, which destroyed the Baltimore bridge, will certainly lead to some changes in the maritime industry regarding the navigation of large ships in confined waters.
Container ships have experienced a real boom in increasing capacity and size. With ever-larger ships on the market, the question of the safety of navigating such ships, especially in shallow waters and narrow channels, has arisen. From the articles reviewed, it can be concluded that many articles focus on identifying the most reliable methods for predicting the maneuvering characteristics of ships before and during its construction.
Figure 5 lists the first ten countries (China, Belgium, United States, United Kingdom, Portugal, Germany, Japan, South Korea, Netherlands, and India) that have contributed the greatest research into the maneuverability of large ships in shallow waters. China, which has a considerable number of scientists, has contributed the most scientific articles to this field of research. Slightly fewer, but still a large proportion of the contributions to this research come from Belgium, which we can attribute to the collaboration between Flanders Hydraulic Research and Ghent College of Applied Sciences. Installing a towing tank in 1992-1993 led to numerous maneuvering tests, which resulted in new mathematical models for predicting ships’ maneuvering characteristics and led to numerous scientific articles. The Flanders Institute has also contributed to many scientific articles from European countries (United Kingdom, Portugal, Germany, Netherlands, Poland, Italy, and Norway), as many are based on maneuvering tests in the towing tank. Japan has contributed a considerable number of articles through the efforts of the JMMG, whose work is based on this topic. Other countries with a significant number of scientific articles are the United States, South Korea, India, Malaysia, Brazil, and Australia. Based on the available research data, the study of the hydrodynamic properties of ships in confined waters is an interesting topic in most countries and continents.
Figure 6 was created using WOS Viewer. The figure displays the authors cited for their contribution to scientific articles on ship maneuvering in shallow waters with the prediction of hydrodynamic forces. The coloring of the grid represents different research groups, each focusing on specific aspects of ship hydrodynamics and characterized by their most important contributions to the field. This visualization highlights the diversity of research topics within the field and underscores the collaborative efforts that are driving progress in ship hydrodynamics. The figure shows that a certain number of researchers are responsible for many scientific articles that can be used for future research on this topic. Dele-Fortrie’s research, for example, focuses on the navigation of large ships in shallow water and the forces acting on them. Together with Lataire and Chen, they are investigating trajectory tracking controls, course keeping controls and the validation of automatic steering algorithms for large ships navigating in shallow waters or narrow fairways [45]. In addition to the two other authors, he is also working with Vantorre to study the maneuvering behavior of ultra-large container vessels (ULCVs) in shallow waters.
In their articles, they investigate the effect of the heeling of the ship, the effect of water depth in the transition from medium to very shallow water, the wave forces when maneuvering the ship with effects on the propeller and rudder performance, and the turning ability. For most of their research, they use data obtained during free-running tests in the towing tank in Belgium [46]. Together with Eloot, they are engaged in research into the interactions between the banks, the forces that occur during lightering, the so-called ship to ship operation, and the effects of a muddy seabed on the maneuverability of ships [47]. Guedes Soares, in collaboration with Sutulo, is investigating the phenomenon of squats in coastal waters during ship to ship interaction. They are also investigating the effects of the bottom geometry in narrow channels on the maneuvering and seakeeping characteristics of ships. Their research aims to demonstrate the influence of different bottom types such as flat horizontal bottom, multi-level bottom, inclined bottom or dredged channel on the maneuverability of ships in narrow waters [48]. Guedes Soares in collaboration with Haitong Xu, is investigating the maneuverability of large container ships in shallow waters and the necessary ship propulsion for ships of this size [49]. The results of towing tank tests are also used for certain measurements. Zou focuses in his research on predicting maneuvers of large ships, especially container ships, using CFD methods and unsteady RANS equations, as well as predicting the hydrodynamic forces acting on a ship as it approaches a lock in shallow waters [20]. Yasukawa focuses on researching the maneuverability of ships with a single propeller shaft and two propellers/twin rudders ships when maneuvering in shallow waters and during berthing and unberthing operation using free model tests as part of the MMG. Yasukawa is investigating the maneuverability of ships under the influence of external forces such as wind and waves as well as the course stability of a ship near the bank or a channel wall in shallow water [50]. In their research papers, most authors investigate the influence of hydrodynamic forces acting on a ship when navigating in confined waters, including the squat and bank effect, using currently available methods. In many research articles, towing tank is used, which form the basis for mathematical calculations. The towing tank models often refer to large container ships which indicates a growing problem with ever larger container ships in shallow waters, which are very susceptible to the influence of hydrodynamic forces, especially wind.
During our research, we identified many journals containing articles on ships’ hydrodynamic properties. The most represented scientific journals on this topic are shown in Figure 7. The greatest number of authors published their work in the journal Ocean Engineering, followed by Applied Ocean Research. From the number of articles published, it can be concluded that these two are the leading journals for studying ship maneuvers and hydrodynamic properties. The other journals dealing with the hydrodynamic properties of a ship, such as the Journal of Marine Science and Engineering, and TransNav (International Journal of Marine Navigation and Safety of Sea Transportation), have made a significant contribution to this research. The remaining number of relevant articles for this research are also listed in Figure 7.
Through a systematic review of the literature, original articles closely related to the study of maneuvering characteristics of ships in narrow channels and shallow waters, including the methods used to predict these characteristics, were selected for further analysis. Based on the analysis of the selected articles, we identified and categorized methods used for predicting the maneuverability of ships and classified them into three groups. These groups are: Captive model test, Computational fluid dynamics and System identification techniques. These three methods used in shipping industry are crucial for predicting the ship’s hydrodynamic coefficient.
3.1. Captive model test
The captive model test, which takes place in a controlled area such as a towing tank where the ship model is towed at specific angles, measuring the sway force and yaw moment, has a good effect in predicting the hydrodynamic forces acting on the ship. In this type of test, two measurements are made: the rotating arm mechanism (in which the ship model is attached to a mechanical arm that rotates at a specific rate and speed), and the PMM, in which the ship model is attached to two columns, one forward and the other aft. The columns move the ship forward at a specific rate and create a variable yaw [51].
The PMM test is a widely used method for the experimental investigation of the maneuvering characteristics of various ships, including catamarans, container ships, and large tankers. The PMM test includes maneuvering in shallow waters and narrow channels and the influence of the bank effect during maneuvering. Large tankers such as Very Large Crude Carriers (VLCCs) and Ultra Large Crude Carriers (ULCCs) are not allowed to enter many ports due to their size and draught, so most operations take place further a sea from the port. These operations are known as ship-to-ship (STS) and lightering. In these operations, two (usually) large ships are positioned alongside each other at sea, with certain hydrodynamic forces occurring between the ships. The PMM test is used to understand better the hydrodynamic forces acting on both ships [52,53,54,55,56].
One of the most knowledgeable institutes for navigable ship model research is Flanders Hydraulic Research (FHR), operated by the Maritime Department of Ghent College. The towing tank, built-in 1992-1993, consists of a planar motion carriage, a wave generator, and ship-to-ship interaction equipment. The equipment was designed for captive model testing, and the experimental results were used to develop mathematical models for maneuvering simulations. Towing tank tests in confined waters are considered the most effective approach to understanding a vessel’s hydrodynamic capabilities [57]. Since 2009, free-running model tests have been used to directly predict the maneuvering performance of full-scale ships, with the possibility of developing computer simulation models for further research [58]. Most captive model tests in shallow waters are conducted in FHR based on a 6 DOF maneuvering model because of IMO-specific regulations for maneuvering in wind and waves [20]. The 6 DOF maneuvering model using FHR can also be used to evaluate maneuvering tests on open water, trying to find a mathematical model suitable for port maneuvering simulations [59]. Reynolds-averaged Navier-Stokes (RANS) simulations have proven to be a successful tool for determining hydrodynamic derivates for ships. RANS simulations simulate a series of model tests to predict ship maneuvering from two aspects: free surface flow and real rotating propeller [60,61]. With the trend of increasing ship tonnage, the demand for constructing twin propeller double rudder ships has increased significantly. The maneuvering characteristics of twin-propeller ships have a complicated area around the stern, so studying the interaction between the hull, propeller, and rudder is important. RANS simulations play a crucial role in simulating the hull, propeller, and rudder interaction in captive model tests for twin-screw ships [62]. Using a hexapod platform with 6 DOF to perform captive model tests allows us to create independent or coordinated motions that are impossible with traditional methods [63]. The hexapod platform allows us to explore new types of tests, such as the vertical harmonic test, which are still in the research phase [64].
3.2. Computational Fluid Dynamics
Computational fluid dynamics (CFD) is one of the most reliable mathematical methods for accurately predicting and analyzing bank effects. To create a suitable mathematical model to study the bank effect, many intensive systems engineering model tests in the towing tank are required, which are quite expensive. Mathematical models, which are often used to predict the bank effect, have the limitation that they cannot provide detailed insight into the flow dynamics, which is necessary to understand the complex mechanisms of the bank effect. To solve this problem, researchers have turned to numerical techniques and CFD methods to study the phenomena of the bank effect. The most common method is the potential flow method, which allows detailed analysis of flow patterns, and most numerical research in this area relies on the theory of potential flow, which also accounts for free surface effects. However, this area of research does not consider important problematic factors in shallow water, such as breaking waves and viscous and turbulent effects. Therefore, the RANS method is used to predict the ship-bank hydrodynamic forces as a good alternative to obtain a more accurate fluid flow equation since it can include these important factors in its calculations. The CFD-based RANS method is a useful tool in marine hydrodynamics. It is widely used, especially by ship designers, as they can test the ship’s performance in the design phase and make the necessary corrections. This method can also be used for straight-ahead sailing and turning maneuvers tests when overloading of the propeller occurs. The CFD-based RANS can accurately predict flow details around the propeller in critical operating conditions. In addition, it is also used for shallow water problems, the squat effect and ship-ship interactions [21,65,66,67,68,69,70,71,72,73]. In contrast to the static RANS methods, which are used for maneuvering problems in shallow waters, the CFD-based Unsteady Reynolds-average Navier-Stokes (URANS) methods are used for predicting ship behavior in heavy weather, such as rolling and course-keeping ability in regular and irregular waves in low and high seas [74]. In this method, hybrid URANS solvers are often used to solve the time domain of hydrodynamic loads and motions when a ship performs dynamic maneuvers [75]. The CFD approach is also used for free-running simulations of maneuvers such as the zig-zag test, course keeping, and turning circle maneuvers with highly satisfactory results. The results of these simulations include viscous and rotational effects that allow a clear and detailed analysis of the hydrodynamic interactions among hull, propeller and rudder [21,76,77,78,79,80]. Trimarans, known for their high-performance capability with complex hull shapes and layouts, require hydrodynamic testing to be performed. CFD methods are very useful for the numerical simulation of the propulsion performance of a high-speed trimaran with waterjet propulsion [81]. With the advancement of computer technology, the CFD approach is increasingly prevalent in military shipbuilding and is applied to predict the hydrodynamic coefficient of submarines [82].
3.3. System Identification Techniques
The system identification method determines the hydrodynamic coefficient from the measured ship motion and the applied rudder angle. This method can be defined as a systematic approach to creating a mathematical model of an unknown system based on given input and output from measured data. Successful system identification depends on correctly selecting three key elements: a mathematical model representing a system, input-output data, and a parameter estimation scheme. It is a powerful technique that can correctly identify the vessel’s movement, so it is often used to develop control and navigation systems [10,83].
System identification techniques with system-based (SB) and free-running CFD experiments are used to predict the maneuvering coefficient, as they are considered one of the most important simulation methods for predicting ship maneuverability. System-based simulations reduce the calculation time as they only solve the equations of motion within a given mathematical model. It requires only one minute per free-running test, whereas the CFD method requires several weeks or months, depending on the various factors of the ship’s movement. Free-running model tests such as the zig-zag test, course keeping, and turning circle test are used to predict the maneuvering characteristics of a full-scale ship. The results of the free-running model tests are used to develop computer simulation models for further analysis [84,85]. The prediction of maneuvering trajectories of a newly designed ship without simulation under the condition that the database of maneuvering parameters from many full-scale and free model tests is available is the empirical “no simulation method” [83]. The simulation method is required for maneuvering parameters that are not included in the database. Figure 8 shows an overview of the different methods for predicting the maneuvering characteristics of ships.
Besides the system identification techniques, the Abkowitz and MMG models are the most recognized and widely used mathematical models for predicting ship maneuvers. The main difference between the Abkowitz and MMG models lies in determining the hydrodynamic forces acting on the maneuvering ship. The Abkowitz model examines all hydrodynamic forces simultaneously (longitudinal, surge, transverse sway, and yaw motion). In contrast, the MMG model divides the hydrodynamic forces into categories such as hull, propeller, and rudder forces and their interactions [17,86,87,88,89]. The MMG model is also known as the “ruder to yaw response model” as it describes the ship’s rate of turn response to the rudder actions. The MMG model can also be applied for shallow water maneuvering with reasonable accuracy in practical use but with certain improvements to enhance its performance and by using the coefficient of hydrodynamic forces at every water depth [90,91]. Numerous simulation methods based on the MMG approach are in use. Still, there have been problems in fitting the hydrodynamic force data to the maneuver simulation because the different methods may not apply to each other. Therefore, it was concluded by the Japan Society of Naval Architects and Ocean Engineers that the basic parts of the method should be common. As a result, the MMG standard method was proposed, which consists of four elements: the maneuver simulation model, the procedure for the captive model test, the maneuver simulation analysis method, and the full-scale ship maneuver prediction method [92].
Semi-theoretical and semi-empirical methods are simplified mathematical models used for preliminary assessment of ship maneuvering characteristics using semi-empirical formulae derived from a database of conducted captive model tests. Empirical regressions are based upon the most prevalent ship hull forms like single screw ships. Deviation from common hull forms, like in twin screw ships, can exceed the parametric range of the experimental database and potentially lead to inaccurate predictions [93,94,95,96].
Artificial neural networks (ANN), as an alternative approach, can be used to predict hydrodynamic ship parameters based on empirical information from experiments with a scale model and are a widely used tool to effectively predict the maneuverability of certain types of ships. In addition, ANN is used to determine the optimal ship trajectory in narrow channels and shallow waters and for course alteration maneuvers. ANN applications have proven practical by using mathematical models to predict catamarans and trimarans’ pitching and heaving motions with unconventional underwater hulls. Research into the automatic mooring of ships is considered one of the most complex problems in ship control. The ANN model has proven to be an extremely effective solution for the automatic docking of ships, as it can learn and imitate the actions of the human brain during docking maneuvers [96,97,98,99]. Neural network algorithms may have certain advantages since no structure of the mathematical model of the ship is required. However, at the same time, the lack of a physical structure can be a disadvantage because, without a physical basis, the ANN model cannot be extended, adapted, or modified [100,101]. ANN is also used as a learning process in autonomous ship control. It can be described as a ship control system that simulates the learning process of an autonomous control unit that collects input signals and calculates the values of the necessary parameters for maneuvering the ship in confined waters [102]. With the development of Maritime Autonomous Surface Ships (MASS), predicting the maneuverability of these vessels has become an important issue, especially when navigating narrow channels and shallow waters. Autonomous navigation requires highly accurate maneuvering models to eliminate all possible uncertainties and inadequacies in the required actions. For this purpose, maneuver data from real ship maneuvers was systematically collected and analyzed. The comparison between real and simulated data showed the possibility of predicting the maneuvering characteristics of autonomous vessels using simulations in a controlled environment [103,104].
The performance of the ship’s engine has always been an important factor in the construction of ships and their design. Achieving the desired speed with minimum fuel consumption makes a ship economical. Introducing the Energy Efficiency Design Index (EEDI) for new ships represents a significant step in setting energy-efficient regulations for different types of ships. However, fears have been raised that some ship designers will reduce engine power rather than develop new innovative propulsion systems to meet the new regulations. It is paramount to understand the vessel’s maneuvering characteristics, especially in adverse weather conditions under the influence of waves, wind, and currents, as a reduction in engine power can lead to reduced maneuverability, compromising the vessel’s safety in adverse weather. In addition, underpowering can affect the stopping distance, which may remain unchanged in unfavorable weather conditions. Given this new situation, the IMO adopted guidelines (Resolution MEPC) in 2011, which set out the minimum engine power requirements for different types of ships, also considering unfavorable weather conditions in the assessment. To meet the new challenges in the maritime industry, the EU has funded the SHOPERA (Energy Efficient Safe Ship Operation) project. The main objective of the project is to develop numerical methods and software tools and to carry out comprehensive studies on the propulsion and control systems of ships required for maneuvering in adverse weather conditions, including open sea, coastal waters, and confined waters [105,106,107,108]
4. Conclusions
This article aims to identify and analyze the methods for predicting the hydrodynamic characteristics of large ships when passing through confined waters. Likewise, this article can guide future research toward the most effective and appropriate methods for determining the hydrodynamic coefficient to improve the safety of navigation at sea. In this article, we have identified the leading countries, the most frequent researchers, and the most used methods for predicting the hydrodynamic coefficient of large ships. After reviewing the most widely used methods in this field of research, we have also drawn attention to the leading countries, which account for a significant proportion of the number of scientific articles on this topic. The top ten countries—China, Belgium, United States, United Kingdom, Portugal, Germany, Japan, South Korea, Netherlands, and India—are significant for most research on this topic and for the results produced by the research articles. The tightening of IMO standards for assessing the maneuverability of ships has led to ship owners demanding maneuverability assessments at the initial stages of ship construction. This demand has encouraged scientists to develop more advanced and innovative methods to meet the new standards effectively. The significant increase in scientific articles over the last 15 years confirms the increased research efforts to meet the new requirements.
Given the considerable effort scientists have invested in developing innovative solutions for predicting maneuverability, it is essential not to ignore the human element, as the navigator makes the final decisions and steers the ship. Despite various methods for predicting the maneuverability of ships in confined waters, accidents such as groundings, collisions, and impacts still occur. A notable example is the serious accident involving the container ship Dali on March 26, 2024, when the ship lost maneuverability due to a sudden power loss and collided with a bridge. Similarly, the incident involving the container ship MSC Michigan VII in Charleston on June 5, 2024, underscores the critical importance of understanding a ship’s maneuverability to make timely decisions in emergencies. Due to a malfunction in the propulsion control systems, the ship sailed under a bridge at an uncontrolled speed. Based on a recent Baltimore bridge case, the crew could not reduce speed and hesitated to shut down the main engine because they were uncertain how the ship would respond without propulsion. They were particularly concerned about navigating the ship through the river’s sharp turns, where a significant amount of critical infrastructure along the shore includes marinas, moored tankers, military vessels, and the bridge itself. Fortunately, there were no consequences this time. These cases highlight the need for effective training and education for seafarers to understand their ship’s maneuverability and make timely decisions in critical situations. Training on bridge simulators is crucial in improving maneuvering skills and preparing seafarers for real-world scenarios. These simulators provide a realistic and controlled environment where mariners can practice handling various situations, including managing system malfunctions and navigating through challenging waterways.
As container ships continue to grow and reach lengths of up to 425 meters, it is essential to thoroughly test the maneuverability of these vessels, especially when passing through narrow channels and shallow waters such as the Suez Canal. In addition to the influence of the hydrodynamic forces acting on the ship’s size, the wind’s influence must also be considered due to the large wind area of ships of this type and size. Studies have shown that the wind is the weakest link for large container ships. Especially in narrow channels with many bends, where the ship must turn frequently, the influence of the wind is most pronounced, and the danger of the influence of hydrodynamic forces is greatest. UKC decreases due to the ship’s inclination caused by turning, which thus increases the effect of hydrodynamic forces, including the wind. Following this reason, many countries in the world have set criteria for wind restrictions in the port limits and canals where such ships can transit. Problems arise when testing container ship models in the towing tank because the tank has no curvatures. Towing tank tests provide the most accurate results on hydrodynamic forces but have the disadvantage that the tank is flat and has no curvatures, so the results on hydrodynamic forces cannot be determined when the ship tilts and it is then that the ship is exposed to the strongest effects of hydrodynamic forces. The aim of future research would be to obtain accurate hydrodynamic data when the ship is sailing around bends in narrow channels because this data would enable a complete analysis of hydrodynamic forces acting on a ship in confined waters. As the MASS industry is still in its infancy compared to human-crewed vessels, it is a concern when such vessels operate in confined waters. Future research should focus on the navigation of MASS vessels in shallow waters and narrow channels, as well as the docking and undocking, including a training program for human operators of such vessels.
Education and training on bridge simulators should become a mandatory seafarer training program to improve understanding of vessel performances. This training is equally important for crew-manned and MASS vessels. The information gathered in this review could serve as a guide and direction for future research on this topic, and we expect that it will support and encourage the improvement of existing methods and innovation in the development of new methods for predicting the hydrodynamic capabilities of ships.
Author Contributions
Conceptualization, M.M. and I.P.; methodology, M.M. and M.P; software, M.M.; validation, I.P., T.M. and M.P.; data curation, M.M.; writing—original draft preparation, M.M., I.P., T,M and M.P; writing—review and editing, M.P.; visualization, M.M., and M.P; supervision, I.P.; project administration, I.P.; funding acquisition, M.P. All authors have read and agreed to the published version of the manuscript.
Funding
The publication of the paper is supported by the research group (P2-0394; Modelling and simulation in traffic and maritime engineering) at the Faculty of Maritime Studies and Transport, financed by the Slovenian National Research Agency.
Acknowledgments
In this section, you can acknowledge any support given which is not covered by the author contribution or funding sections. This may include administrative and technical support, or donations in kind (e.g., materials used for experiments).
Conflicts of Interest
“The authors declare no conflict of interest.”
Abbreviations
ANN—Artificial neural networks
CFD—Computational fluid dynamics
CMT—Circular Motion Test
DOF—Degrees of Freedom
EEDI—Energy Efficiency Design Index
FHR—Flanders Hydraulic Research
IMO—International Maritime Organization
JMMG—Japanese Maneuvering Modeling Group
MASS—Maritime Autonomous Surface Ships
MMG—Mathematical Maneuvering Modeling Group
OTT—Oblique Towing Test
PIANC—The World Association of Waterborne Transport Infrastructure
PMM—Planar Motion Mechanism
PRISMA—Preferred Reporting Items for Systematic Reviews and Meta-Analyzes
RANS—Reynolds-Average Navier-Stokes
RAT—Rotating Arm Test
RPM—Revolutions Per Minute
SB—System—Based
SHOPERA—Energy Efficient Safe Ship Operation
STS—Ship to Ship
UKC—Under-Keel Clearance
ULCC—Ultra Large Crude Carrier
ULCV—Ultra Large Container Vessel
URANS—Unsteady Reynolds-Average Navier-Stokes
VLCC—Very Large Crude Carrier
References
- Henrik Sjöberg, by; Roos, H.; Edvall, A.; Hallbjörner, F. Safe handling of Ultra Large Container Ships in strong wind; Gothenburg, 2016.
- Fan, S.; Yang, Z.; Wang, J.; Marsland, J. Shipping accident analysis in restricted waters: Lesson from the Suez Canal blockage in 2021. Ocean Eng. 2022, 266. [CrossRef]
- Terziev, M.; Tezdogan, T.; Oguz, E.; Gourlay, T.; Demirel, Y.K.; Incecik, A. Numerical investigation of the behaviour and performance of ships advancing through restricted shallow waters. J. Fluids Struct. 2018, 76, 185–215. [CrossRef]
- Lee, S.; Hong, C. Study on the course stability of very large vessels in shallow water using CFD. Ocean Eng. 2017, 145, 395–405. [CrossRef]
- Gucma, L. Risk management in the area of bridges situated on waterways in the aspect of ship collisions; 2024; Vol. 1st edition.
- Özden, M.C.; Kurdoğlu, S.; Demir, E.; Sarıöz, K.; Gören, . A compact motion controller-based planar motion mechanism for captive manoeuvring tests. Ocean Eng. 2020, 220, 108195. [CrossRef]
- Guo, H. peng; Zou, Z. jian System-based investigation on 4-DOF ship maneuvering with hydrodynamic derivatives determined by RANS simulation of captive model tests. Applied Ocean Research 2017, 68, 11–25. [CrossRef]
- Maritime Organization, I. Resolution msc.137(76) (adopted on 4 December 2002) Standards for ship Manoeuvrability; 2002.
- NATO Unclassified + SWE Ship behaviour in Shallow and Confined Water: an Overview of Hydrodynamic Effects through EFD; 2011.
- Liu, J.; Hekkenberg, R.; Rotteveel, E.; Hopman, H. Literature review on evaluation and prediction methods of inland vessel manoeuvrability. Ocean Eng. 2015, 106, 458–471. [CrossRef]
- Amin, O. M.; Hasegawa, K. Assessment of Ship Manoeuvrability in Shallow Waterways.; 2010.
- Fujino, M. Studies on Manoeuvrability of Ships in Restricted Waters. J. Soc. Nav. Arch. Jpn. 1968, 1968, 51–72. [CrossRef]
- Eloot, K.; Delefortrie, G.; Vantorre, M.; Quadvlieg, F. Validation of Ship Manoeuvring in Shallow Water Through Free-Running Tests; 2015. [CrossRef]
- ITTC International Towing Tank Conference ITTC - Captive Model Test; 2017.
- Xu, H.; Soares, C.G. Hydrodynamic coefficient estimation for ship manoeuvring in shallow water using an optimal truncated LS-SVM. Ocean Eng. 2019, 191, 106488. [CrossRef]
- Du, P.; Ouahsine, A.; Toan, K.T.; Sergent, P. Simulation of ship maneuvering in a confined waterway using a nonlinear model based on optimization techniques. Ocean Eng. 2017, 142, 194–203. [CrossRef]
- ITTC International Towing Tank Conference ITTC - Testing and Extrapolation Methods Manoeuvrability Captive Model Test Procedures; 2005.
- Hajivand, A.; Mousavizadegan, S. H. Virtual simulation of maneuvering captive tests for a surface vessel. International Journal of Naval Architecture and Ocean Engineering 2015, 7, 848–872.
- ITTC International Towing Tank Conference ITTC - Captive Model Test for Underwater Vehicles; 2021.
- Liu, Y.; Zou, L.; Zou, Z.; Guo, H. Predictions of ship maneuverability based on virtual captive model tests. Eng. Appl. Comput. Fluid Mech. 2018, 12, 334–353. [CrossRef]
- Hajizadeh, S.; Seif, M. S.; Mehdigholi, H. Determination of ship maneuvering hydrodynamic coefficients using system identification technique based on free-running model test. Scientia Iranica 2016, 23, 2154–2165.
- Zhang, X.-G.; Zou, Z.-J. Identification of Abkowitz Model for Ship Manoeuvring Motion Using ε -Support Vector Regression. J. Hydrodyn. 2011, 23, 353–360. [CrossRef]
- Ahmed, Y. A. Mathematical model of the manoeuvring motion of a ship. In Advanced Structured Materials; Springer Verlag, 2018; Vol. 85, pp. 551–566.
- Nomoto, K.; Taguchi, T.; Honda, K.; Hirano, S. On The Steering Qualities of Ships; Osaka, 1957.
- Luo, W.; Zou, Z. Identification of response models of ship maneuvering motion using support vector machines; 2007.
- Kim, D.; Tezdogan, T.; Incecik, A. Hydrodynamic analysis of ship manoeuvrability in shallow water using high-fidelity URANS computations. Appl. Ocean Res. 2022, 123. [CrossRef]
- Mofidi, A.; Carrica, P.M. Simulations of zigzag maneuvers for a container ship with direct moving rudder and propeller. Comput. Fluids 2014, 96, 191–203. [CrossRef]
- Bertram, V. Ship Maneuvering. In Practical Ship Hydrodynamics; Elsevier, 2012; pp. 241–298.
- Lataire, E. Captive model tests based 6 DOF shallow water manoeuvring model. 2016.
- Kazerooni, M. F.; Seif, M. S. Experimental evaluation of ship squat in shallow waters. Journal of the Brazilian Society of Mechanical Sciences and Engineering 2 14, 36, 559–569.
- Taimuri, G.; Matusiak, J.; Mikkola, T.; Kujala, P.; Hirdaris, S. A 6-DoF maneuvering model for the rapid estimation of hydrodynamic actions in deep and shallow waters. Ocean Eng. 2020, 218, 108103. [CrossRef]
- Tuck, E. 0; Model Basin, D. T.; Washington, D. C. Shallow-water flows past slender bodies; 1966.
- Hooft, J. P. Manoeuvring Large Ships in Shallow Water-I. The Journal of Navigation 1973, 26, 189–201.
- Carreño, J. E.; Mora, J. D.; Pérez, F. L. A study of shallow water’s effect on a ship’s pivot point Estudio de efectos por aguas someras sobre el punto de pivote de un buque Introduction 1 2; 2012; Vol. 32.
- Xu, H.; Hinostroza, M.; Wang, Z.; Soares, C.G. Experimental investigation of shallow water effect on vessel steering model using system identification method. Ocean Eng. 2020, 199, 106940. [CrossRef]
- Hooft, J. P. Manoeuvring Large Ships in Shallow Water-II. The Journal of Navigation 1973, 26, 311–319.
- Zeng, Q.; Thill, C.; Hekkenberg, R. Shallow water effects on ship-generate d waves. In Proceedings of the 5th International Conference on Ship Manoeuvring in Shallow and Confined Water (MASHCON), 19–23 May 2019, Ostend, Belgium; 2019.
- Sami K, M. A. E. L. H. S. Numerical Modeling of the Muddy Layer Effect on Ship Squat and Resistance. Proceedings of the 5th International Conference on Ship Manoeuvring in Shallow and Confined Water (MASHCON), 19–23 May 2019, Ostend, Belgium 2019.
- WG, P. R. no 121-2014 Harbour Approach Channels Design Guidelines; 2014.
- Puertos del Estado (España) ROM 3.1-99 Recommendations for the design of the maritime configuration of ports, approach channels and harbour basins.; Puertos del Estado, 2007.
- Bechthold, J.; Kastens, M. Robustness and quality of squat predictions in shallow water conditions based on rans-calculations. In Proceedings of the 5th International Conference on Ship Manoeuvring in Shallow and Confined Water (MASHCON), 19–23 May 2019, Ostend, Belgium; 2019; pp. 11–24.
- Shevchuk, I.; Bottner, C. U.; Kornev, N. Numerical investigation of scale effects on squat in shallow water. Proceedings of the 5th International Conference on Ship Manoeuvring in Shallow and Confined Water (MASHCON), 19–23 May 2019, Ostend, Belgium 2019, 410–422.
- PIANC The World Association for Waterborne Transport Infrastructure Ship Dimensions and Data for Design of Marine Infrastructure; PIANC HQ Boulevard du Roi Albert II 20 B. 3, Ed.; No.235-2022.; General Secretariat of PIANC: Brussels, 1990.
- Liberati, A.; Altman, D.G.; Tetzlaff, J.; Mulrow, C.; Gøtzsche, P.C.; Ioannidis, J.P.A.; Clarke, M.; Devereaux, P.J.; Kleijnen, J.; Moher, D. The PRISMA statement for reporting systematic reviews and meta-analyses of studies that evaluate health care interventions: Explanation and elaboration. J. Clin. Epidemiol. 2009, 62, e1–e34. [CrossRef]
- Chen, C.; Verwilligen, J.; Mansuy, M.; Eloot, K.; Lataire, E.; Delefortrie, G. Tracking controller for ship manoeuvring in a shallow or confined fairway: Design, comparison and application. Appl. Ocean Res. 2021, 115, 102823. [CrossRef]
- Tello Ruiz, M.; Mansuy, M.; Delefortrie, G.; Vantorre, M. Modelling the manoeuvring behaviour of an ULCS in coastal waves. Ocean Eng. 2019, 172, 213–233. [CrossRef]
- Lataire, E.; Vantorre, M.; Vandenbroucke, J.; Eloot K Ship to Ship Interaction Forces During Lightering Operations; Trodheim, 2011.
- Sutulo, S.; Rodrigues, J.; Soares, C.G. Hydrodynamic characteristics of ship sections in shallow water with complex bottom geometry. Ocean Eng. 2010, 37, 947–958. [CrossRef]
- Xu, H.; Soares, C.G. Manoeuvring modelling of a containership in shallow water based on optimal truncated nonlinear kernel-based least square support vector machine and quantum-inspired evolutionary algorithm. Ocean Eng. 2019, 195, 106676. [CrossRef]
- Yasukawa, H.; Sakuno, R. Application of the MMG method for the prediction of steady sailing condition and course stability of a ship under external disturbances. J. Mar. Sci. Technol. 2019, 25, 196–220. [CrossRef]
- Michael S. T., F. S. H. Maneuvering and control of surface and underwater vehicles; 2013.
- Liu, H.; Ma, N.; Gu, X. Experimental Study on Ship-Bank Interaction of Very Large Crude Carrier in Shallow Water. J. Shanghai Jiaotong Univ. (Science) 2018, 23, 730–739. [CrossRef]
- Lataire, E.; Vantorre, M.; Delefortrie, G.; Candries, M. Mathematical modelling of forces acting on ships during lightering operations. Ocean Eng. 2012, 55, 101–115. [CrossRef]
- Milanov, E.; Zlatev, Z.; Chotukova, V.; Stern, F. Analysis of inherent course stability of a high-speed catamaran in deep and shallow water. International Shipbuilding Progress 2011, 58, 83–96.
- Zhu, Z.; Kim, B.-S.; Wang, S.; Kim, Y. Study on numerical PMM test and its application to KCS hull. Appl. Ocean Res. 2022, 127. [CrossRef]
- Hirano, M.; Nakamura’, Y. The Japan Society of Naval Architects and Ocean Engineers NII-Electronic Library Service An Experimental Study on Maneuvering Hydrodynamic Forces in Shallow Water; 2010.
- Delefortrie, G.; Geerts, S. The towing tank for manoeuvres in shallow water. 2016.
- ITTC International Towing Tank Conference 2008 Rev 03 ITTC-Free Running Model Tests; 2008.
- Delefortrie, G.; Vantorre, M. 6DOF manoeuvring model of KCS with full roll coupling. Ocean Eng. 2021, 235, 109327. [CrossRef]
- Yao, J.; Liu, Z.; Song, X.; Su, Y. Ship manoeuvring prediction with hydrodynamic derivatives from RANS: Development and application. Ocean Eng. 2021, 231, 109036. [CrossRef]
- Lee, S.-H.; Paik, K.-J.; Hwang, H.-S.; Eom, M.-J.; Kim, S.-H. A study on ship performance in waves using a RANS solver, part 1: Comparison of power prediction methods in regular waves. Ocean Eng. 2021, 227, 108900. [CrossRef]
- Guo, H.-P.; Zou, Z.-J.; Liu, Y.; Wang, F. Investigation on hull-propeller-rudder interaction by RANS simulation of captive model tests for a twin-screw ship. Ocean Eng. 2018, 162, 259–273. [CrossRef]
- Tu, H.; Song, L.; Xie, D.; Liu, Z.; Zhang, Z.; Sun, J. Performing captive model tests with a hexapod. Ocean Eng. 2018, 171, 49–58. [CrossRef]
- ITTC International Towing Tank Conference 2021 Rev 06 ITTC - Captive Model Test; 2021.
- Ortolani, F.; Mauro, S.; Dubbioso, G. Investigation of the radial bearing force developed during actual ship operations. Part 1: Straight ahead sailing and turning maneuvers. Ocean Eng. 2015, 94, 67–87. [CrossRef]
- Zou, L.; Larsson, L. Computational fluid dynamics (CFD) prediction of bank effects including verification and validation. J. Mar. Sci. Technol. 2013, 18, 310–323. [CrossRef]
- ITTC International Towing tank Conference ITTC-Recommended Procedures and Guidelines Practical Guidelines for Ship CFD Ap-plications; 2014.
- ITTC International Towing Tank Conference ITTC- Practical Guidelines for RANS Calculation of Nominal Wakes; 2014.
- Van Hoydonck, W.; Toxopeus, S.; Eloot, K.; Bhawsinka, K.; Queutey, P.; Visonneau, M. Bank effects for KVLCC2. Journal of Marine Science and Technology (Japan) 2019, 24, 174–199.
- Hajivand, A.; Hossein Mousavizadegan, S. Virtual maneuvering test in CFD media in presence of free surface. International Journal of Naval Architecture and Ocean Engineering 2015, 7, 540–558.
- Tezdogan, T.; Incecik, A.; Turan, O. Full-scale unsteady RANS simulations of vertical ship motions in shallow water. Ocean Eng. 2016, 123, 131–145. [CrossRef]
- Muscat-Fenech, C.D.; Sant, T.; Zheku, V.V.; Villa, D.; Martelli, M. A Review of Ship-to-Ship Interactions in Calm Waters. J. Mar. Sci. Eng. 2022, 10, 1856. [CrossRef]
- Kazerooni, M.F.; Seif, M.S. Experimental Study of Forces Exerted on Ships Due to the Vertical Walls of Navigation Channels. TransNav, Int. J. Mar. Navig. Saf. Sea Transp. 2015, 9, 199–203. [CrossRef]
- Serani, A.; Diez, M.; van Walree, F.; Stern, F. URANS analysis of a free-running destroyer sailing in irregular stern-quartering waves at sea state 7. Ocean Engineering 2021, 237.
- Jin, Y.; Duffy, J.; Chai, S.; Magee, A.R. DTMB 5415M dynamic manoeuvres with URANS computation using body-force and discretised propeller models. Ocean Eng. 2019, 182, 305–317. [CrossRef]
- Kim, D.; Song, S.; Tezdogan, T. Free running CFD simulations to investigate ship manoeuvrability in waves. Ocean Eng. 2021, 236, 109567. [CrossRef]
- Kim, D.; Tezdogan, T. CFD-based hydrodynamic analyses of ship course keeping control and turning performance in irregular waves. Ocean Eng. 2022, 248, 110808. [CrossRef]
- Broglia, R.; Dubbioso, G.; Durante, D.; Di Mascio, A. Turning ability analysis of a fully appended twin screw vessel by CFD. Part I: Single rudder configuration. Ocean Eng. 2015, 105, 275–286. [CrossRef]
- Dubbioso, G.; Durante, D.; Di Mascio, A.; Broglia, R. Turning ability analysis of a fully appended twin screw vessel by CFD. Part II: Single vs. twin rudder configuration. Ocean Eng. 2016, 117, 259–271. [CrossRef]
- Carrica, P.M.; Mofidi, A.; Eloot, K.; Delefortrie, G. Direct simulation and experimental study of zigzag maneuver of KCS in shallow water. Ocean Eng. 2016, 112, 117–133. [CrossRef]
- Jiang, F.; Li, Y.; Gong, J. Study on the manoeuvre characteristics of a trimaran under different layouts by water-jet self-propulsion model test. Appl. Ocean Res. 2021, 108, 102550. [CrossRef]
- Gao, T.; Wang, Y.; Pang, Y.; Chen, Q.; Tang, Y. A time-efficient CFD approach for hydrodynamic coefficient determination and model simplification of submarine. Ocean Eng. 2018, 154, 16–26. [CrossRef]
- Proposal, R.; Yoshimura, Y.; Pyo Rhee, K. The Manoeuvring Committee Final Report and Recommendations to the 24th ITTC; 2005.
- Araki, M.; Sadat-Hosseini, H.; Sanada, Y.; Tanimoto, K.; Umeda, N.; Stern, F. Estimating maneuvering coefficients using system identification methods with experimental, system-based, and CFD free-running trial data. Ocean Eng. 2012, 51, 63–84. [CrossRef]
- ITTC International Towing Tank Conference ITTC - Testing and Extrapolation Methods Manoeuvrability Free Running Model test. 2008, 1–11.
- Mohammadafzali, S.; John, S. A Mathematical Model for the Maneuvering Simulation of a Propelled SPAR Vessel, 2016.
- A Abkowitz, B. M. T. U. Hydro-Og Aerodynamisk Laboratorium Lectures on Ship Hydrodynamics-Steering and Manoeuvrability; Lyngby-Denmark, 1964.
- Martin A. Abkowitz Stability-and-motion-control-of-ocean-vehicles; 1969.
- Vijay, A.; Somayajula, A. Identification of Hydrodynamic Coefficients using Support Vector Regression. In Oceans Conference Record (IEEE); Institute of Electrical and Electronics Engineers Inc., 2022.
- Ahmed, Y. A. Mathematical model of the manoeuvring motion of a ship. In Advanced Structured Materials; Springer Verlag, 2018; Vol. 85, pp. 551–566.
- Yoshimura, Y.; Yasuo Yoshimura Hiratsuka, B. R.; center, D. Mathematical model for the manoeuvring ship motion in shallow water Mathematical Model for the Manoeuvring Ship Motion in Shallow Water [Application of MMG mathematical model to shallow water]-41; 1976; Vol. 200.
- Yasukawa, H.; Yoshimura, Y. Introduction of MMG standard method for ship maneuvering predictions. J. Mar. Sci. Technol. 2014, 20, 37–52. [CrossRef]
- Mohammadafzali, S.; John, S. A Mathematical Model for the Maneuvering Simulation of a Propelled SPAR Vessel. Master Thesis, Faculty of Engineering and Applied Science: St.John’s, 2016.
- Dr-Ing Zou Zaojian, B.; Jiao, S. Lecture Notes Ship Manoeuvring and Seakeeping School of Naval Architecture, Ocean and Civil Engineering; 2006.
- Dubbioso, G.; Viviani, M. Aspects of twin screw ships semi-empirical maneuvering models. Ocean Eng. 2012, 48, 69–80. [CrossRef]
- Moreira, L.; Soares, C.G. Simulating Ship Manoeuvrability with Artificial Neural Networks Trained by a Short Noisy Data Set. J. Mar. Sci. Eng. 2022, 11, 15. [CrossRef]
- Moreira, L.; Soares, C.G. Dynamic model of manoeuvrability using recursive neural networks. Ocean Eng. 2003, 30, 1669–1697. [CrossRef]
- Im, N.; Hasegawa, K. A Study on Automatic Ship Berthing Using Parallel Neural Controller(2nd Report)-Motion Identification Considering Lateral Speed and Angular Velocity to cope with Disturbances-The Technology for Marine Traffic Hazard Control system using Ship navigation Big Data View project Ship Accident Analysis View project. 2003.
- Im, N.-K.; Nguyen, V.-S. Artificial neural network controller for automatic ship berthing using head-up coordinate system. Int. J. Nav. Arch. Ocean Eng. 2018, 10, 235–249. [CrossRef]
- Sutulo, S.; Soares, C.G. An algorithm for offline identification of ship manoeuvring mathematical models from free-running tests. Ocean Eng. 2014, 79, 10–25. [CrossRef]
- Rajesh, G.; Bhattacharyya, S. System identification for nonlinear maneuvering of large tankers using artificial neural network. Appl. Ocean Res. 2008, 30, 256–263. [CrossRef]
- Lacki, M. Intelligent Prediction of Ship Maneuvering. TransNav, the International Journal on Marine Navigation and Safety of Sea Transportation 2017, 10, 511–516. [CrossRef]
- Gug, S. G.; Harshapriya, D.; Jeong, H.; Yun, J. H.; Kim, D. J.; Kim, Y. G. Analysis of manoeuvring characteristics through sea trials and simulations. In IOP Conference Series: Materials Science and Engineering; IOP Publishing Ltd, 2020; Vol. 929. [CrossRef]
- Xue, Y.; Liu, Y.; Xue, G.; Chen, G. Identification and Prediction of Ship Maneuvering Motion Based on a Gaussian Process with Uncertainty Propagation. J. Mar. Sci. Eng. 2021, 9, 804. [CrossRef]
- Sutulo, S.; Soares, C.G. Review on Ship Manoeuvrability Criteria and Standards. J. Mar. Sci. Eng. 2021, 9, 904. [CrossRef]
- Papanikolaou, A.; Zaraphonitis, G.; Bitner-Gregersen, E.; Shigunov, V.; El Moctar, O.; Soares, C.G.; Reddy, D.; Sprenger, F. Energy Efficient Safe SHip Operation (SHOPERA). Transp. Res. Procedia 2016, 14, 820–829. [CrossRef]
- Van Zwijnsvoorde, T.; Tello Ruiz, M.; Delefortrie, G.; Lataire, E. Sailing in shallow water waves with the DTC container carrier: open model test data for validation purposes. In Proceedings of the 5th International Conference on Ship Manoeuvring in Shallow and Confined Water (MASHCON), 19–23 May 2019, Ostend, Belgium; Knowledge Centre Manoeuvring in shallow and confined water, 2019; pp. 411–422.
- Resolution MEPC.203(62) Amendments to the annex of the protocol of 1997 to amend the International convention for the prevention of pollution from ships, 1973, as modified by the protocol of 1978 relating thereto (Inclusion of regulations on energy efficiency for ships in MARPOL Annex VI); 2011.
Figure 1.
Methods used to predict the hydrodynamic coefficient of a ship.
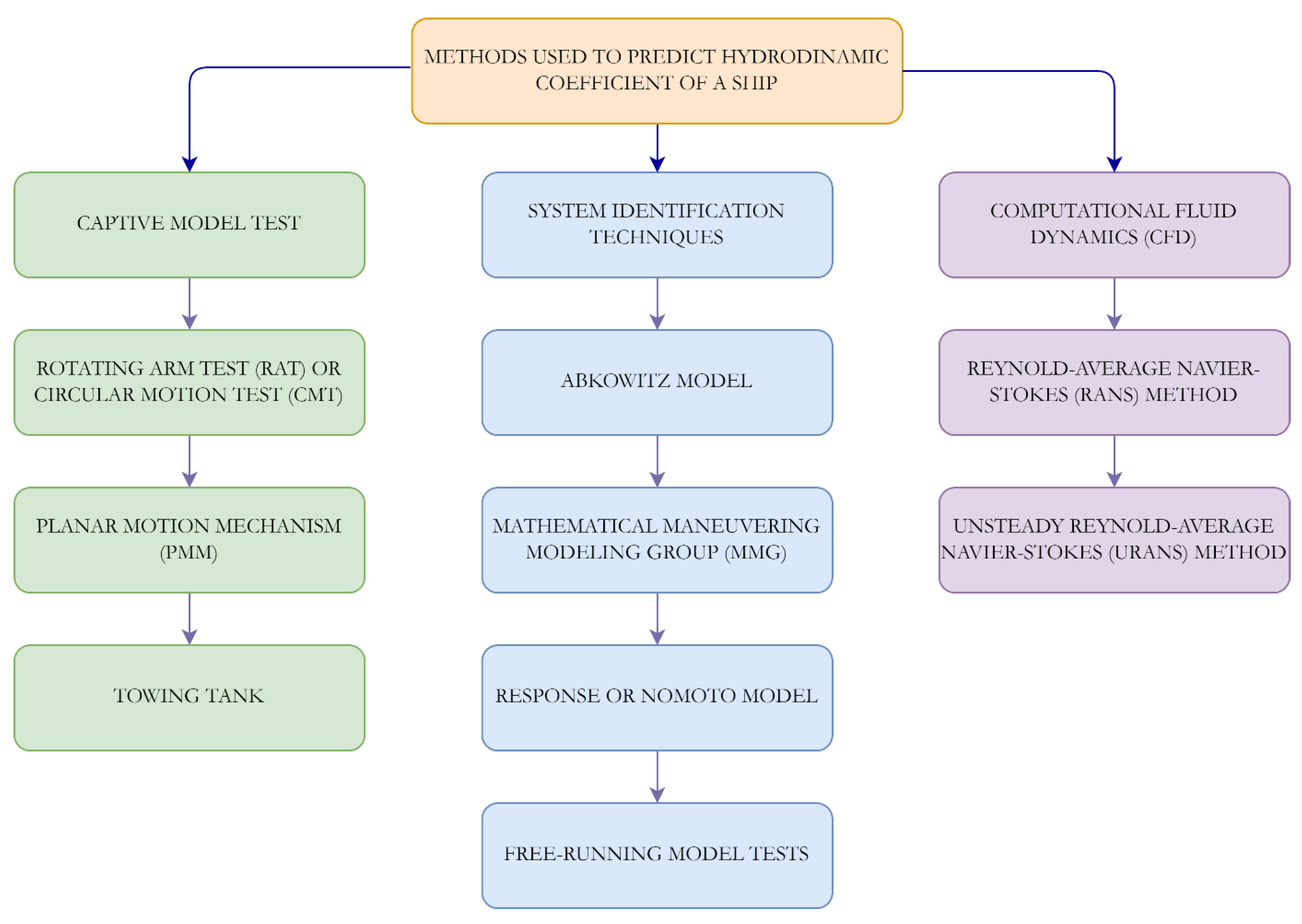
Figure 2.
Literature retrieval process.
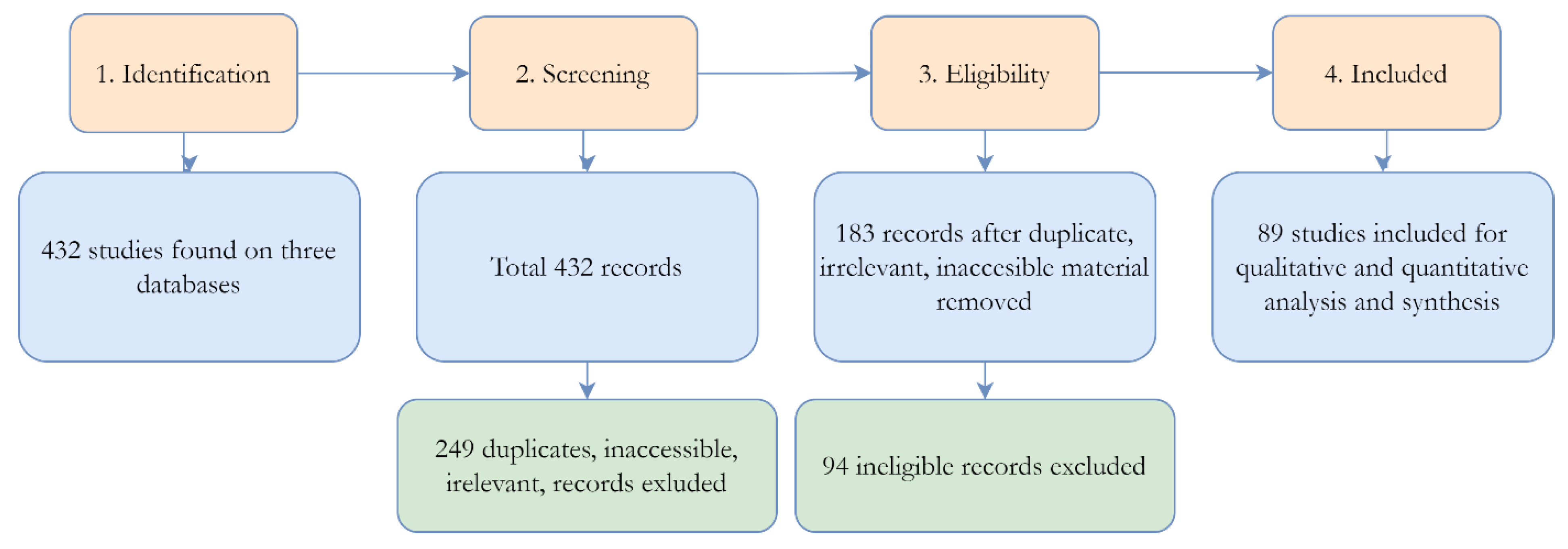
Figure 3.
The link of the keyword “ship maneuvering in shallow waters” with the 30 most used keywords in the research (Scopus).
Figure 3.
The link of the keyword “ship maneuvering in shallow waters” with the 30 most used keywords in the research (Scopus).
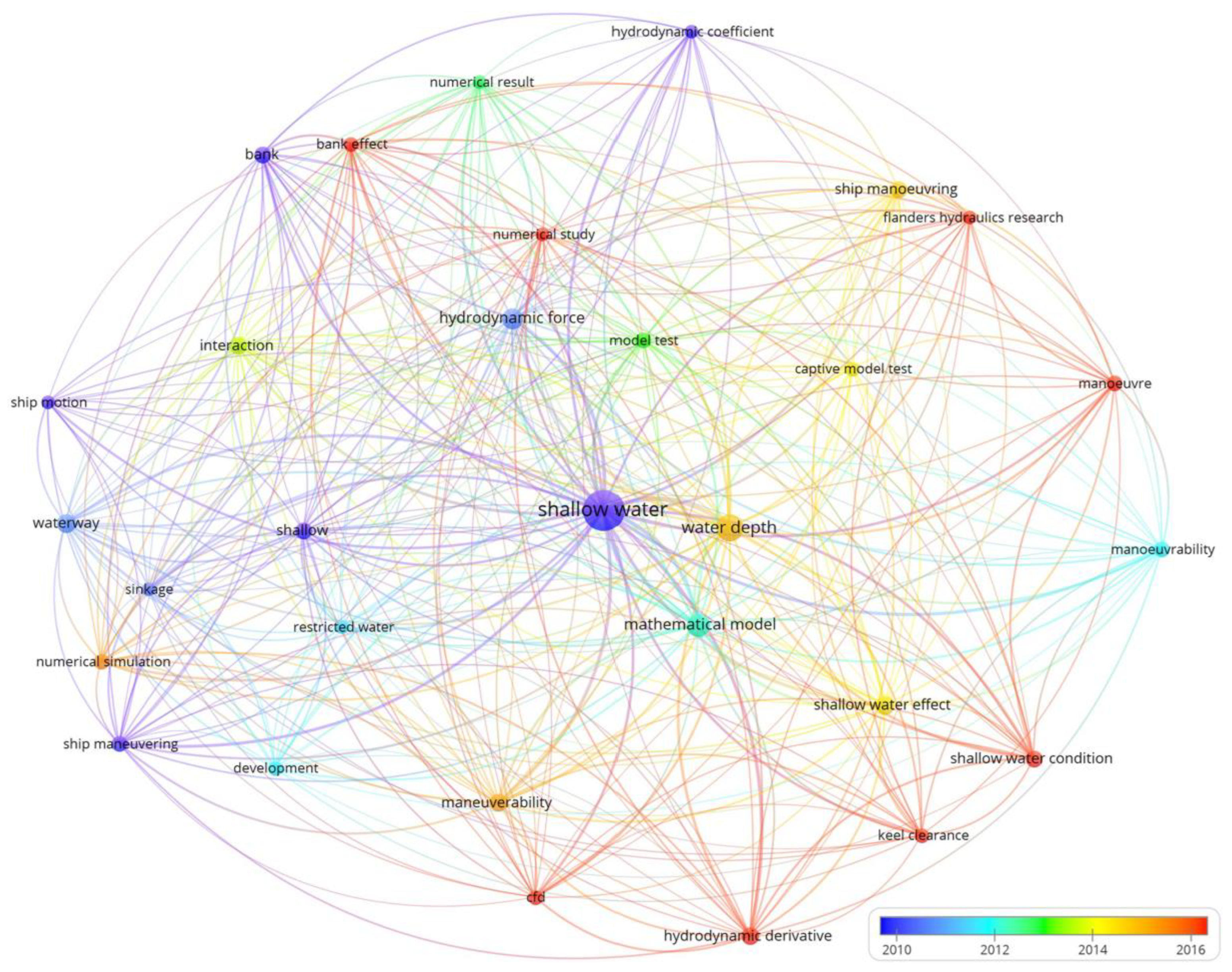
Figure 4.
Annual publication count.
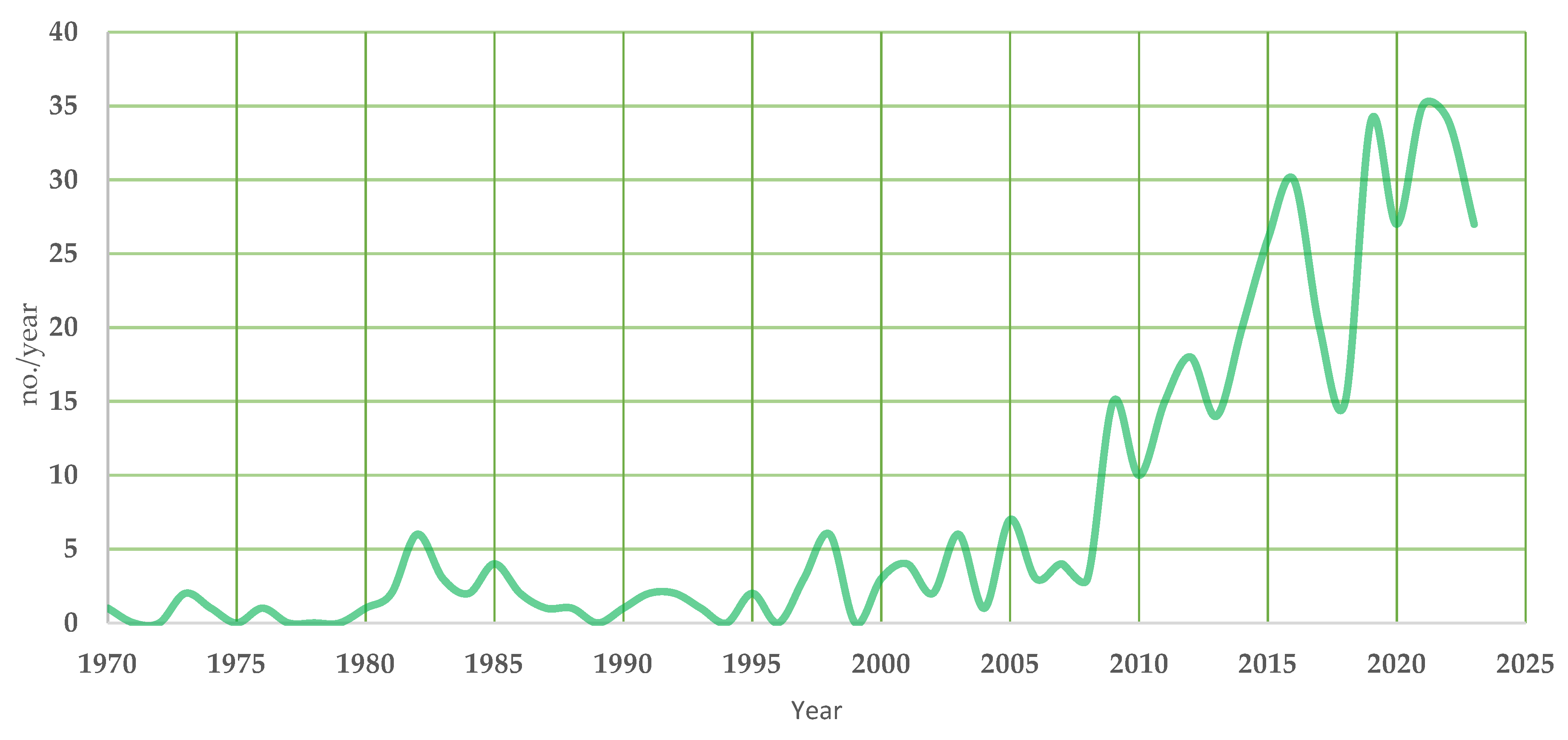
Figure 5.
Number of publications per country.
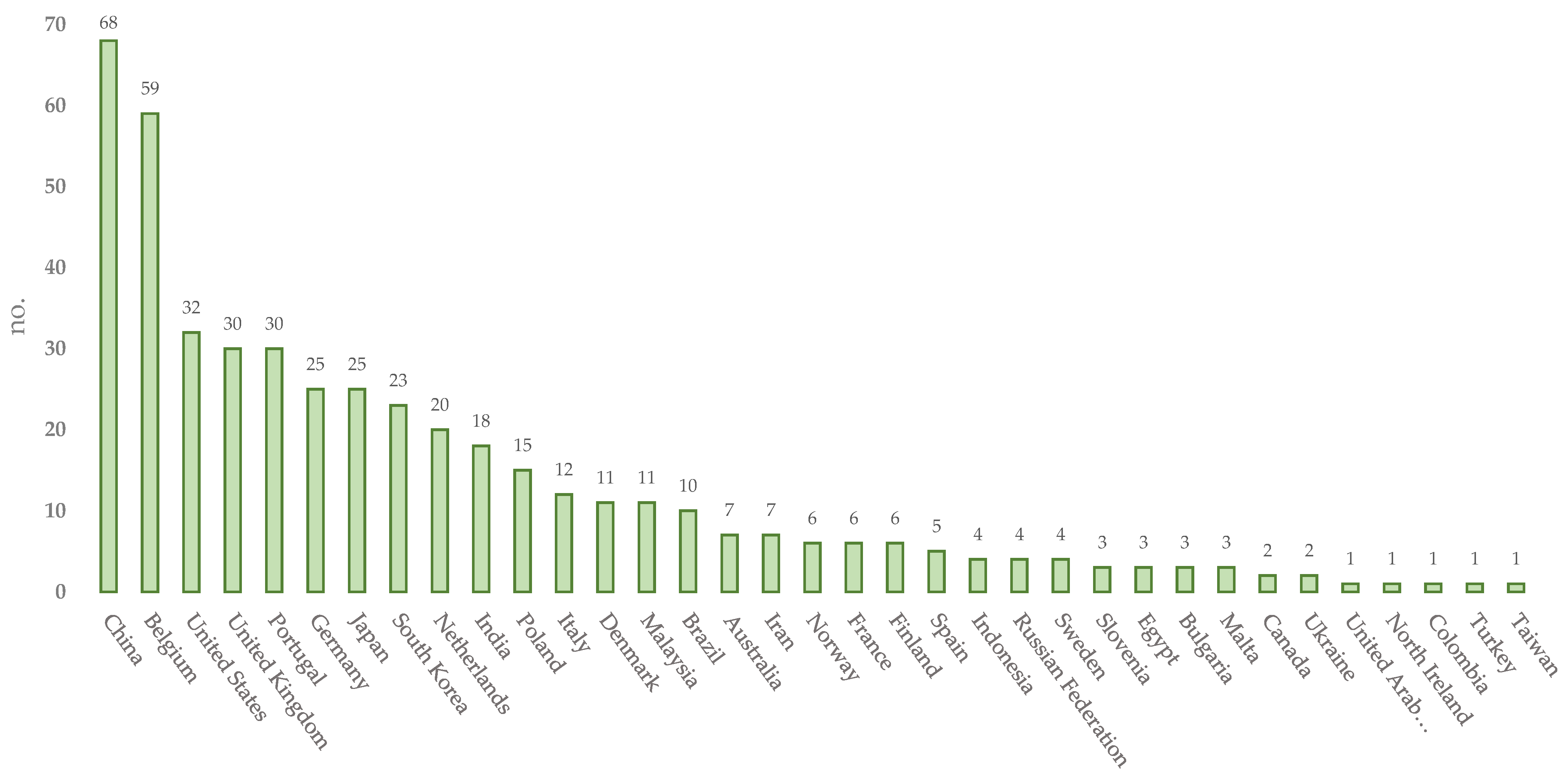
Figure 6.
Authors with the most articles related to ship hydrodynamics.
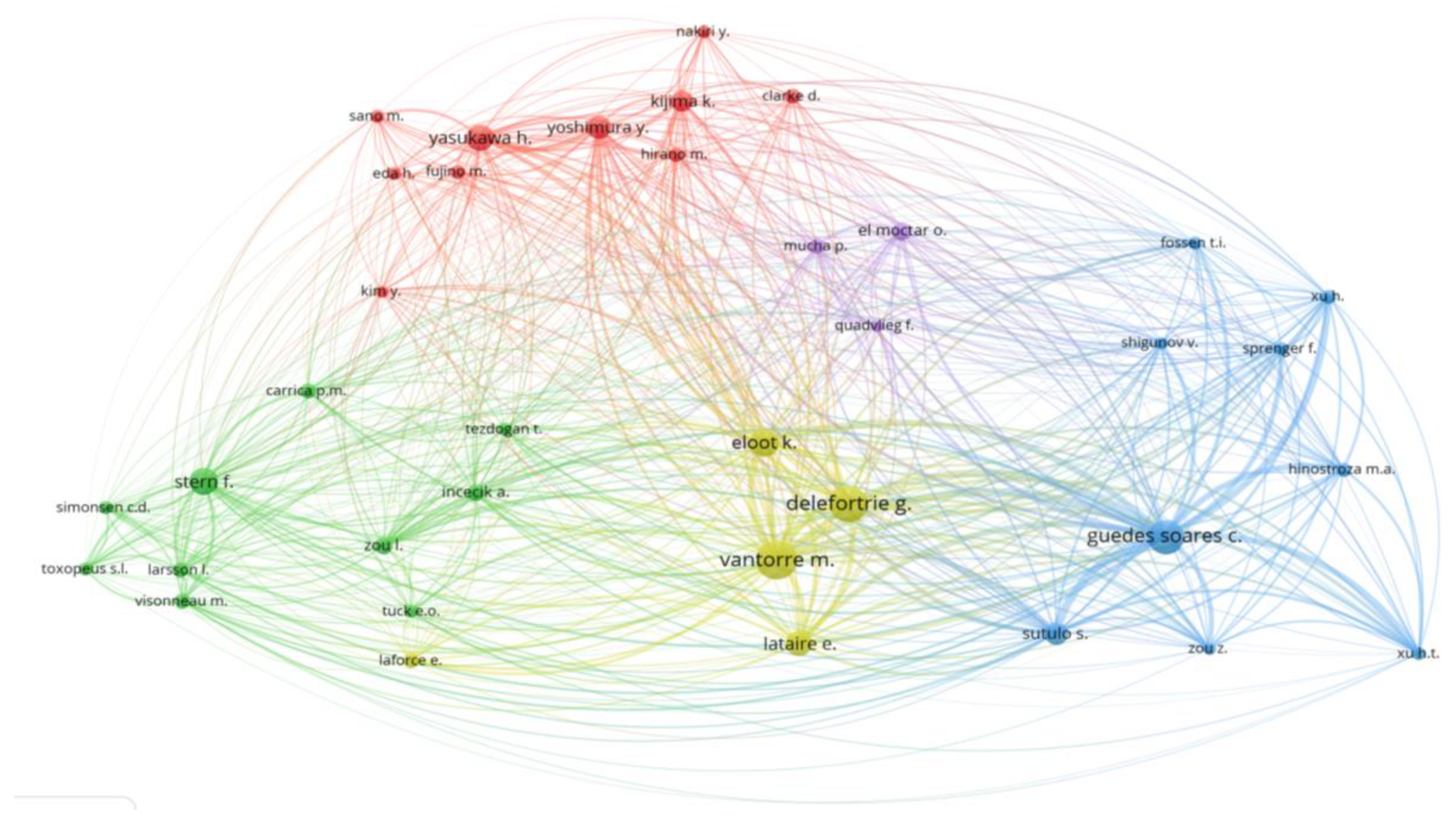
Figure 7.
Journals with the most articles related to ship hydrodynamics.
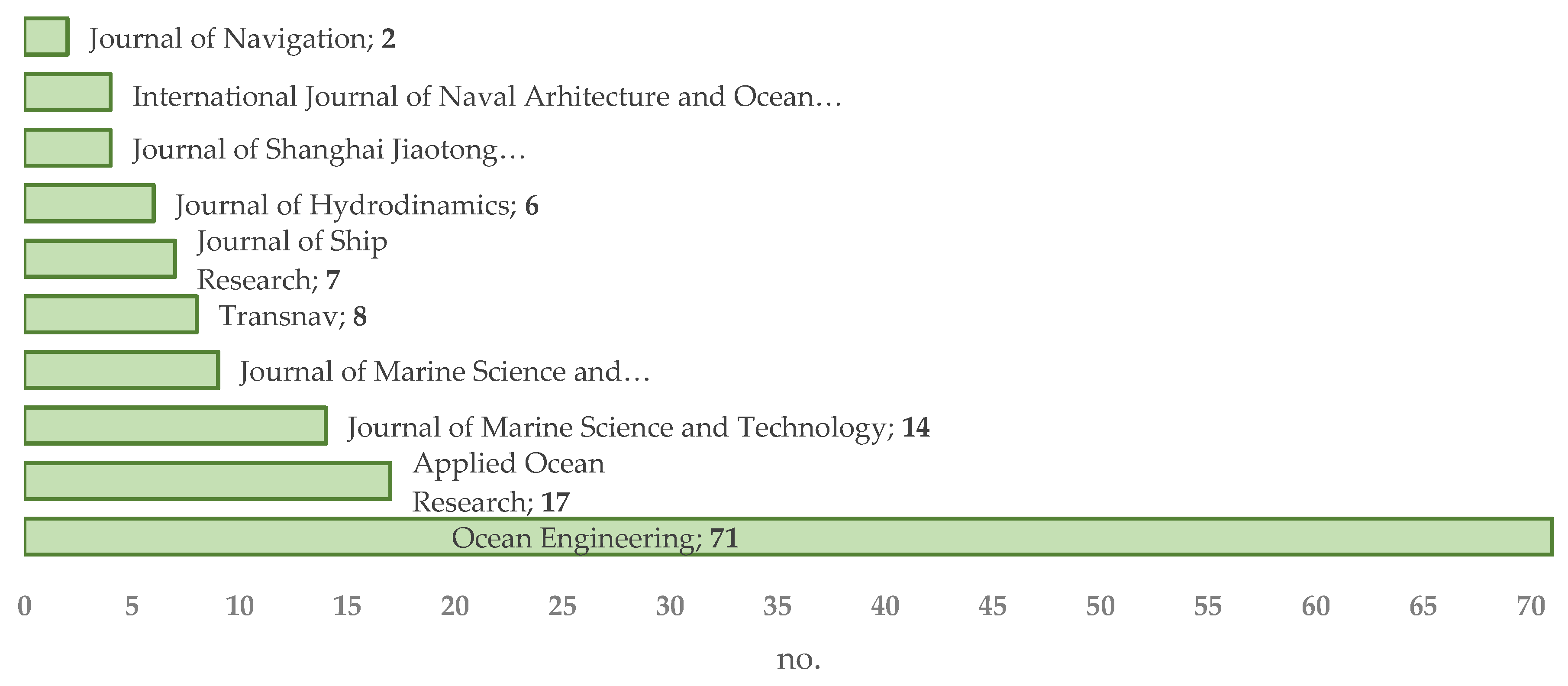
Figure 8.
Overview of Maneuvering Prediction Methods [85].
Figure 8.
Overview of Maneuvering Prediction Methods [85].
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



