Submitted:
10 March 2024
Posted:
11 March 2024
You are already at the latest version
Abstract
Quantitative analysis of human gait is critical for early discovery, progressive tracking, and rehabilitation of neurological and musculoskeletal disorders, such as Parkinson’s Disease, stroke, and Cerebral Palsy. Gait analysis typically involves estimating gait characteristics, such as spatio-temporal gait parameters and gait health indicators (e.g., step time, length, symmetry, and balance). Traditional methods of gait analysis involve the use of cameras, wearables, and force plates, but are limited in operational requirements when applied in daily life - such as direct line-of-sight, carrying devices, and dense deployment. This paper introduces a novel approach for gait analysis by passively sensing footstep-induced floor vibrations during walking using vibration sensors mounted on the floor surface. Our approach is non-intrusive, scalable, and perceived as more privacy-friendly, making it suitable for continuous gait health monitoring in daily life. We developed a floor vibration-based gait analysis framework to estimate various gait parameters that are used as standard metrics in medical practices, including temporal parameters (step, stride, stance, swing, double-support, single-support time) and spatial parameters (step length, width, angle, stride length), and extracts gait health indicators (cadence/walking speed, left-right symmetry, gait balance, initial contact types). The main challenge is that floor vibrations are distinct across different floor types. To address this challenge, our approach develops floor-adaptive algorithms to extract floor-specific features and is designed to be generalizable to various settings, including homes, hospitals, and eldercare facilities. We evaluate our approach through real-world walking experiments with 20 adults with 12,231 labeled gait cycles across concrete and wooden floors. Our results show 90.5% (RMSE 0.08s), 71.3% (RMSE 0.38m), and 92.3% (RMSPE 7.7%) accuracy in estimating temporal, spatial parameters, and gait health indicators, respectively.
Keywords:
gait analysis
; structural vibration
; spatiotemporal parameter
1. Introduction
Gait analysis is a key component in the diagnosis, progressive tracking, and rehabilitation of musculoskeletal or neurological disorders, such as Cerebral Palsy, Parkinson’s Disease, stroke, and dementia [1,2,3]. It typically involves estimating spatio-temporal gait parameters and extracting health-related indicators, such as step time, length, symmetry, and balance [4,5]. For example, existing studies have shown that estimating spatiotemporal parameters is critical for patients with muscular dystrophies or cerebral palsy [6,7], which leads to treatments that can delay the progression and extend patients’ life. In addition, gait parameters are also essential for tracking the progress of physical rehabilitation from injuries and stroke, which enables timely interventions that accelerate the process of recovery [8]. Moreover, balance and symmetry have been shown to be critical for fall prediction for the elderly [9]. According to the Centers for Disease Control (CDC), every one in four older adults falls in the U.S., and millions of them are hospitalized as a result of falls [10]. Quantitative measurements of gait health can help individuals understand their health status and safety risks, leading to improved life quality.
Traditional gait analysis are typically conducted in gait clinics, which aim to extract a set of quantitative metrics, such as spatial and temporal gait parameters, and other indicators that inform balance, symmetry, and posture. Approaches include direct observation by medical staff, force plates, electromyography, and infrared cameras for motion capturing [3,11,12,13]. These existing approaches can achieve high accuracy in well-calibrated environments but are unsuitable for continuous monitoring in daily life. This is because they require professionally trained staff to operate and only provide sporadic measurements at the time of in-person visits [14]. To overcome this limitation, other studies have developed portable cameras, wearable devices, pressure mats, and radio frequency (RF)-based systems that enable more frequent and continuous gait health monitoring in non-clinical settings [15,16,17,18,19]. However, they have raised privacy concerns and operational limitations such as direct line-of-sight, having to carry/charge devices, and dense sensor deployment, which prevents them from ubiquitous usage in daily life.
This paper introduces a novel approach for gait analysis using footstep-induced floor vibrations to enable ubiquitous and non-intrusive monitoring of gait health in people’s daily living spaces. The method uses vibration sensors (e.g., geophone and/or accelerometer) to capture the floor vibrations generated by human footsteps during walking (see Figure 1a). The collected data is then analyzed to infer a person’s gait profile in terms of standard gait health metrics (i.e., gait parameters) that are commonly referred to in medical practices, which are visualized through a newly designed diagram shown in Figure 1b. The gait parameters include temporal parameters (e.g., step, stride, stance, swing, double-support, single-support time) and spatial parameters (e.g., step length, width, angle, stride length). The extracted gait health indicators include (cadence, left-right symmetry, gait balance, and initial contact type), which are important for gait abnormality detection and characterization. The floor vibration-based approach has been successful in person/event detection [20,21], activity monitoring [22,23], gait-based person identification [24,25], and indoor person localization and tracking [26,27,28]. Recent studies started to explore vibration-based gait health monitoring, which has demonstrated promising preliminary results [29,30,31,32,33]. However, such studies are mainly exploratory and limited in scope and depth. Specifically, they focus on only a few simple parameters in a controlled setting, such as step/stride time estimation and localization when walking along a given path at a given location. They also lack generalizability in adapting to ubiquitous real-world settings. Therefore, we develop a fine-grained, interpretable, and ubiquitous gait analysis method that systematically characterizes and extracts spatio-temporal gait parameters and gait health indicators to close the research gap.
The advantages of the floor vibration sensing system include that it is non-intrusive, scalable, and perceived as privacy-friendly [32]. First, no direct contact is needed between the user and the sensor because the sensors are attached to the floor and furniture and operate passively. The approach is scalable because the sensors can be sparsely deployed (up to 20m sensing range as described in the existing literature [22]). In addition, vibration naturally encodes people’s private information through structural mediums, making users less concerned about privacy and minimizing interference with their daily activities. Therefore, our system is suitable for providing continuous monitoring of an individual’s gait parameters and health indicators at home. This allows for early detection of health issues, evaluation of the effectiveness of rehabilitation programs, and timely interventions when needed.
The main research challenge in developing our approach is the effect of different floor structures on the vibration signals [34,35], which has been underscored as critical challenges by the previous studies [34,35]. For example, the surface roughness, material properties, beam/column dimensions, and layouts are different across various buildings, making it difficult to develop an algorithm that is generalizable to different types of floors. To overcome the challenge, we characterize the structural vibrations for various floor types and extract features that are insensitive to the floor but sensitive to gait parameters. To this end, our approach can be easily adapted to a variety of buildings, including homes, hospitals, and eldercare facilities.
The core contributions of this paper are:
- We develop a gait parameter estimation and health information extraction framework using footstep-induced floor vibrations, which is the first ubiquitous gait analysis system of this kind and covers the most extensive range of standard gait health metrics in medical practices, to the best of our knowledge.
- We characterize the footstep-induced floor vibration with respect to various gait characteristics across the two most typical floor types to extract features that are sensitive to gait but are adaptable to the changing floor types, improving the scalability of our method for ubiquitous deployment in people’s homes with different floors.
- We evaluate our approach through a real-world experiment with 20 subjects across two most typical floor types and achieve promising accuracy in estimating spatio-temporal gait parameters and gait health indicators, which are summarized through personalized gait diagrams for effective visualization.
To evaluate our approach, we conducted field walking experiments with 20 subjects from various age groups across the two most typical types of floors, with both vibration sensing and Vicon Motion Capture systems (for ground truth only). Through the experiment, 12,231 gait cycles are captured to estimate gait parameters and gait health indicators. our approach has achieved an average of 90.5% (RMSE 0.08s), 71.3% (RMSE 0.38m), 92.3% (RMSPE 7.7%) accuracy in estimating temporal, spatial parameters, and gait health indicators, respectively. To systematically understand each person’s gait health, we design and generate personalized gait profiles based on the estimated gait characteristics, which provides an effective tool to visualize a person’s complex gait patterns through a simple diagram, allowing visual detection of gait abnormalities.
In the rest of the paper, we first characterize the floor vibration data among various floor types to understand its relationship with the gait parameters and gait health indicators (Section 2). Then, we present the gait analysis framework by describing the details of the algorithm to estimate gait parameters and extract gait health indicators (Section 3). Next, we evaluate our framework through a real-world experiment (Section 4). The results demonstrate the effectiveness of our approach in accurately estimating gait parameters and extracting gait health information. Finally, we conclude the study and discuss the future steps to bring continuous gait health monitoring to real life (Section 5 and Section 6).
2. Characterization of Footstep-Induced Floor Vibrations for Gait Health Monitoring
In this section, we characterize the floor vibrations induced by gait to understand their relation to gait characteristics, including spatio-temporal gait parameters and gait health indicators. First, we introduce the physical insight of footstep-induced floor vibration for gait health monitoring. Then, we establish the relationship between gait characteristics and floor vibration. Finally, we characterize the vibration signals from different floor structures to understand their effects on gait health monitoring.
2.1. Physical Insight behind Footstep-Induced Floor Vibrations
The main physical insight behind floor vibration-based gait health monitoring is as follows: when a person is walking around, each footstep exerts a short-duration force onto the floor, which causes a small deflection on the floor surface [36]. This deflection changes the internal stress of the floor slabs - both the shear force and the bending moment around the impact location increases [37]. The change of force condition breaks the force equilibrium and results in dynamic responses of the floor to restore its equilibrium. These footstep-induced repeated deflection-restoration cycle is described as “vibrations” of the floor structure [38,39]. As the ensuing vibration waves propagate through the floor, they can be measured by vibration sensors mounted at the floor surface at a distance away from the footstep locations. The vibration sensors transform the vertical displacements of the floor into electrical voltage time series [40]. Since the variation in the footstep forces leads to distinct floor vibration patterns, we analyze the collected vibration signals to infer human gait characteristics.
2.2. Relationship between Gait Characteristics and Footstep-Induced Floor Vibrations
Gait characteristics are quantitative measurements of human walking in terms of duration, location, and other indicators to represent postures and ground reaction forces. The gait characteristics examined in our study include 1) temporal gait characteristics (duration measurements), 2) spatial gait characteristics (location measurements), and 3) gait health indicators (health-informed characteristics such as initial contact type, balance, and symmetry). The scope of our study covers a broad spectrum of measurements that are commonly used in clinical gait analysis, which have been shown to be effective and generally applicable for numerous disease types [3,41].
In this subsection, we introduce the background of the above-mentioned gait characteristics and characterize their relationship with the floor vibration signals.
2.2.1. Temporal Gait Characteristics
For the temporal gait characteristics, we first introduce the background of gait cycles and their corresponding temporal parameters and then discuss their relationship with the footstep-induced floor vibrations.
Background of Gait Cycle and Temporal Parameters. A gait cycle is the most fundamental concept in the biomechanics of human walking, which describes the rhythm of the gait and divides continuous body motion during walking into quantifiable units. It is defined as the duration between a foot strike and the subsequent foot strike of the same foot [1]. A typical gait cycle focuses only on one leg and consists of two primary phases: the stance phase and the swing phase. The stance phase is the duration when the foot is in contact with the floor; The swing phase is the duration when the foot is swinging in the air. The stance and swing phases can be separated by two major gait events: 1) a foot strike, which is the onset of the stance phase, and 2) a foot off, which is the onset of the swing phase. When considering the opposite foot, one gait cycle can be further divided as the alternation of double support and single support of two feet. The double support is when both feet are on the floor and the single support is when one foot is swinging in the air.
The temporal gait parameters are defined based on the duration of stance/swing phases and double/single support time. Estimating the duration of these phases helps to identify potential gait abnormalities. For example, a shorter stance time on one leg indicates asymmetrical gait and difficulty in maintaining balance while walking, which may lead to an increased risk of falls [42].
Relationship between Temporal Parameters and Floor Vibrations. To estimate temporal gait parameters from floor vibration signals, we characterize the footstep-induced floor vibration with respect to the time when critical gait events happen. Figure 2 illustrates how different frequency ranges in the floor vibration signals correspond to the gait events and phases.
As observed in Figure 2, the floor vibration induced by a gait cycle consists of two consecutive footstep impulses from the left and right foot. This is because the gait cycles from the left and right foot overlap while walking. After the first footstep impulse, the second impulse happens when the person alters the support foot to another, which is marked as the opposite foot strike. In addition, we observed that the gait events occur at special points in their dominant frequency ranges. Specifically, the foot strike excites a higher frequency in vibration signals than the foot off because of the impulsive footstep force at the point of contact. The foot-off occurs at the peaks of the low-frequency range around the natural frequency of the floor. This aligns with our intuition that the foot-off signifies the beginning of free vibration (i.e., floor vibration when the foot swings in the air), where the natural frequency component reaches the maximum and starts to attenuate. This frequency-gait phase relationship allows us to segment the gait cycle into phases and extract temporal gait parameters, which will be discussed further in Section 3.
2.2.2. Spatial Gait Characteristics
Similar to the previous subsection, we first introduce the background of spatial gait characteristics in terms of spatial gait parameters and then discuss its relationship with footstep-induced floor vibrations.
Background of Spatial Parameters. The spatial parameters describe the distance and direction of the walking path, which is important in quantifying the quality and efficiency of gait, such as symmetry, balance, coordination, and propulsion [1,3]. They are typically defined based on the location of the footsteps. As a simplified example, Figure 3 describes the definition of various spatial parameters when a person is walking in a straight line. The dashed center line between the left and right footsteps represents the walking trajectory. In this case, the step length is defined as the distance between left and right foot strikes perpendicular to the walking trajectory. Similarly, the stride length is defined as the distance between the two adjacent strikes from the same foot, perpendicular to the walking trajectory. On the other hand, the step width is defined as the distance between the center of the footstep and the projected footstep center to the walking trajectory. The step angle is the angle of this projection by setting the previous foot strike location as the origin. In this study, we estimate the spatial parameters based on the footstep location because all the spatial parameters mentioned above can be calculated based on the location.
Characterizing the Floor Heterogeneity for Spatial Parameter Estimation. To localize the footsteps, previous studies have explored the time-difference-of-arrival (TDoA) method, which provides the lowest error so far for footstep localization on floor structures around 0.5 meters [28]. However, this error is too large for spatial gait parameter estimation because the average step length of an adult is around 0.5 meters [41], meaning that the existing work has a 100% error rate. In fact, the main research barrier that prevents accurate vibration-based footstep localization is heterogeneous wave propagation velocity in the floor structures, leading to high uncertainty in estimated locations. This has long been a challenging problem to address because the wave propagation velocity is typically unknown and is affected by complex factors, including material properties, defects/cracks in the structure, and the properties of the connections between structural components. As a result, when a person’s footstep location changes, the underlying structural property also changes, resulting in a different wave propagation velocity.
To understand the heterogeneous wave propagation velocity in the floor structures, we characterize the velocity changes by measuring the wave propagation distance and time as a person walks by, as described in Figure 4 (upper). Under this setup, we record the changes in distance and time when the vibration wave propagates from the footstep location to the sensor location, as shown in Figure 4 (lower). Since the sensors are mounted at different locations, the wave propagation distance reaches the minimum from left to right as the person is the closest to each sensor, as shown in Figure 4a. However, the wave propagation time follows a different trend, where the minimum does not align with the minimum distance as shown in Figure 4b. This means that the velocity varies across different locations on the floor. By taking the division between distance and time (i.e., ), we found that the velocity is between 30 m/s and 300 m/s on the testing walkway, which can be the main source of uncertainty in footstep localization.
In addition, the characterization shows that the wave propagation direction also affects the velocity. For example, for the 5th footsteps in Figure 4 (highlighted as black in the upper diagram), the wave traveling velocity has a range of ∼70-130 m/s among these four sensors. Compared to the velocity range across different locations (30-300 m/s), the effect of different wave propagation directions is less significant. Therefore, we assume that the velocity at each footstep location is the mean of all sensors during the calibration because it is not practical to estimate the velocity in a space with an unlimited number of locations and directions. With this assumption, we can calibrate the floor using a spatial velocity profile, which reduces the uncertainty and leads to a more accurate footstep localization. The calibration process will be discussed in Section 3.3.
2.2.3. Gait Health Indicators
Gait health indicators are quantitative measurements defined based on estimations of spatio-temporal parameters, combined with the ground reaction force estimations and initial contact types. In this subsection, we first introduce the background of gait health indicators and then characterize the initial contact type based on the floor vibration signals. The detailed extraction process will be discussed in Section 3.4.
Background of Gait Health Indicators. The gait health indicators being estimated in this study include 1) cadence/walking speed, 2) symmetry, 3) balance, and 4) initial contact type. Their definitions and relationships with gait health are discussed in the following paragraphs.
Cadence is the number of steps taken per minute while walking, which is 60 times the step frequency (steps per second). Walking speed is the amount of distance traveled at a given time, typically represented as (meter per second or kilometer per hour). A slower walking speed is typically associated with an increased functional decline in walking. Increasing cadence has been shown to improve balance and levels of physical activity.
Symmetry refers to the similarity and coordination between the left and right sides of the body while walking [5]. A lack of symmetry can cause an uneven distribution of weight which can increase fall risks and lead to musculoskeletal pain or injury. Existing studies have defined symmetry mainly through symmetry ratio and index [43]. Both compare the difference between the left and right foot. The symmetry ratio is calculated as the quantity of the left foot divided by the right foot. The symmetry index (SI) is computed as the percentage difference between the left and right foot measurements. Our symmetry estimation approach is based on spatial, temporal parameters, and force-related estimates, which will be introduced in Section 3.4.2.
While gait symmetry is about the equality of left and right foot movements during walking, gait balance refers to maintaining stability and control during walking, where a person adjusts postures and movements in response to changes in the walking conditions or external disturbances. Good balance is necessary to preserve stability and prevent falls. Gait balance is typically assessed through various tests in clinical settings, including the Berg Balance Scale (BBS), Mini-BESTest, and backward walking [44], which involves evaluation of the quality of completion in several physical tasks. To assess gait balance during realistic walking scenarios, previous studies typically use the variability in step width and time, which correlate well with the balance measurements in the clinical tests [45]. Therefore, we define a balance score based on the variability of the footsteps, which will be introduced in Section 3.4.3
Initial contact type refers to the pattern when the foot contacts the floor during the foot strike. There are three main types of initial contact: heel strike, toe strike, and midfoot strike (see Figure 5). The type of initial contact is determined by muscle activation and affects the force transmission through the body during walking. For example, a toe strike may be caused by excessive gastrocnemius contraction and can lead to a greater load on the Achilles tendon, and a heel strike typically results in a larger moment on the knee joint [46]. Understanding the individual’s initial contact type is important to differentiate disease types and understand disease stages [47,48].
Characterizing the Floor Vibration for Initial Contact Types. Each type of initial contact leads to a distinct pattern in floor vibrations, which is shown in the wavelet domain plots in Figure 5. The heel strike induces a higher frequency at the initial contact and a lower frequency during the later progression of the foot. The midfoot strike leads to a lower frequency than that of the heel strike because the footstep force is less impulsive. In contrast, the toe strike results in mainly high-frequency components due to the lack of foot progression on the floor. Therefore, we leverage the wavelet domain features to predict the initial contact types, which will be discussed in Section 3.4.
2.3. Effect of Floor Types on Floor Vibration-Based Gait Health Monitoring
To address the core research challenge of floor type variations, we characterize the vibration signals from various types of floor structures to understand their effect on gait health monitoring. Specifically, we analyze and discuss the floor type influence on temporal and spatial parameter estimation, respectively.
2.3.1. Floor Type Influence on Temporal Parameter Estimation
To understand the floor type influence on temporal parameters, we first formulate the problem based on theoretical analysis in structural dynamics and then characterize different floor vibrations through controlled experiments.
Time-Frequency Analysis of the Floor Influence. Prior work formulated the influence of floor types using structural dynamics by assuming the floor is a linear time-invariant system [33,35]. The governing equation for time-frequency analysis of a dynamical system can be written as:
where is the floor displacement, M is the floor mass matrix, is the floor damping matrix, K is the floor stiffness matrix, is the footstep force. In the frequency domain, the expression is as follows:
where is the frequency spectrum of the floor vibration, is the Fourier transform of the footstep force, and the influence of the floor structure is encoded in the transfer function . Based on modal decomposition, each element of the transfer function can be written as:
where j is the mode number and are the given sensor and footstep location. In this equation, and are constants representing mode shapes for a given floor, and the modal frequency response function has large values only when is close to the modal frequency. Therefore, the dominant frequencies observed in the floor vibration spectrum indicate that the footstep force spectrum is being amplified around the modal frequencies. As a result, the effect of the floor types on temporal parameters is reflected through the dominant frequency components of the vibration signals.
Experimental Observation of Temporal Parameters from Floor Vibrations. We validate our theoretical analysis through a controlled experiment on a wooden and concrete floor. Figure 6 shows the wavelet coefficient plot of a person’s footstep on these floors. While the footsteps for the left and right figures are from the same person wearing the same pair of shoes, the dominant frequencies in the wavelet spectra are significantly different for foot strike and foot off. This observation aligns with the theoretical derivation in Equation 3 - assuming the same person has a consistent footstep force pattern, the spectrum of the footstep force appears to be amplified around the modal frequencies of each structure. Since the modal frequencies of the wooden and concrete floors are different due to their discrepancies in mass, stiffness, and damping ratio, the same footstep force results in different dominant frequencies. This allows us to develop floor-adaptive algorithms for temporal parameter estimation.
2.3.2. Floor Type Influence on Spatial Parameter Estimation
To explore the floor type influence on spatial gait parameters, we first model the heterogeneity pattern in each floor and then characterize the floor effect based on experimental observations on the two typical floor types.
Spatial Floor Heterogeneity Modeling. To overcome the challenge between different floor types, we model the wave propagation velocity profile using several initial trials of walking with a temporarily installed camera to provide ground truth on footstep location and time. To reduce the number of unknowns in the model, we simplify the multi-dimensional floor heterogeneity by assuming that the wave propagation velocity is consistent among various directions. This is because the effect of direction is found to be less significant than the effect of footstep location, as discussed in Section 2.2.2. Under this assumption, we estimate velocity at each footstep location by dividing distance over time. After that, we conduct a non-linear regression on the footstep samples to reduce the effect of outliers and the effect of wave propagation directions. We utilize a 4th order polynomial regression model because of two reasons. First, the cross-section layouts of the testing walkways have two spans so at least 4th order polynomial needs to be used to model the deformation trend. Secondly, the polynomial order needs to be constrained to achieve a consistent training and validation accuracy that does not over-fit the individual data samples that reflect local defects. The fitted velocity x at location x in our case is described as follows:
where represents the coefficients estimated during the regression.
Experimental Observation of the Spatial Velocity Profiles on Two Floors. We validate the floor heterogeneity model through a controlled experiment on a wooden and concrete floor. Figure 7 shows the velocity profile along the longitudinal center line of two types of testing floors. The left is a wooden-framed structure with two spans of the same length. On the right is a concrete floor with two spans of different lengths. The fitted wave velocity curve shows that the concrete floor has significantly higher velocities than the wooden floor, which is consistent with the physical insight that concrete typically has a higher density than wood. In addition, the estimated velocity profile correlates well with its cross-section layout - the vibration wave travels slower at column locations and faster at the mid-span of the structure, which aligns with the fact that the column is typically stiffer than the beams and slabs.
3. Gait Analysis Framework through Footstep-Induced Floor Vibrations
In this section, we introduce the gait analysis framework, which estimates spatio-temporal gait parameters and extracts gait health indicators using footstep-induced floor vibrations, and is designed to be robust to various floor types (see Figure 8). First, we will introduce the sensing system that collects and pre-processes the footstep data in Section 3.1. Then, we will discuss how to estimate temporal and spatial gait parameters from various types of floors in Section 3.2 and Section 3.3. Finally, we will describe how to extract gait health indicators that are commonly used to detect and describe gait abnormalities related to neurological/musculoskeletal disorders in Section 3.4.
3.1. Footstep Sensing and Detection
The footstep sensing and detection module includes three parts: 1) vibration data collection, 2) noise filtering, and 3) individual footstep detection. First, we present the hardware for data collection. Then, we describe the noise filtering process which aims to handle electrical and environmental noises. After that, we introduce the algorithm that detects individual footstep-induced impulses from the time series data stream.
Our sensing system uses floor-mounted geophone vibration sensors to collect footstep-induced floor vibrations, as shown in Figure 9 (left). Geophone sensors are mechanical vibration sensors that convert the velocity of the floor vibrations into an analog voltage signal [40,49]. The sensors are typically connected to operational amplifiers (op-amp) to increase the signal amplitude while choosing the appropriate amplification factors to avoid signal clippings. The effective sensing range after amplification is up to 20 meters [22,34], which enables sparse sensor deployment at home.
The noise filtering process typically involves a lowpass filter and a Wiener filter. The lowpass filter is used to remove high-frequency electrical noises. For temporal parameter estimation and health information extraction, the threshold of the lowpass filter is set to 500 Hz, to preserve the majority of the effective gait information in floor vibration data (from 5 to 250 Hz) [32]. This threshold is determined by comparing between footstep’s frequency spectrum and the ambient noise frequency spectrum through preliminary data collection. For spatial gait parameter estimation, the lowpass filter is set to 2500 Hz to compensate for the high wave propagation velocity through the floor medium, enabling an around 10 cm footstep localization resolution through the time-difference-of-arrival (TDoA) method. On the other hand, the Wiener filter is used to reduce environmental noises [50], which takes in 3 seconds of signal with only the environmental noise and leverages its frequency spectrum to filter out noise on the signal with combined footstep impulses and environmental noises.
The footstep detection algorithm is developed based on peak-picking of the wavelet coefficients. As shown in Figure 9 (right), we conduct wavelet transform of the entire signal using the Morlet wavelet, a commonly used wavelet that is efficient in computation and well-suited for time-varying, non-stationary signals [51]. Since footstep-induced vibration signals are impulsive in nature due to the short foot-floor contact duration, we focus on the natural frequency range of typical floor structures (5-50 Hz) in the wavelet coefficients to detect the peaks where these impulses occur. The peaks are identified based on the empirical observation of pure noise signals when no person passes by, including a 1) minimum amplitude of the peaks, which has to exceed the mean of the pure noise signal plus three standard deviations, and a 2) minimum prominence between adjacent peaks, which has to be larger than three standard deviations of the noise. These adaptive thresholds allow the system to adapt to various noise conditions and amplification settings. In addition, since footsteps typically occur in groups with repeated patterns in the vibration signals as a person walks by, we set the minimum number of continuous impulses to three so that footsteps are distinguished from other human-induced impulse signals such as item dropping and door opening/closing. When detecting the footsteps, two adjacent footsteps are marked as from the left and right foot, respectively, to prepare for gait symmetry analysis in Section 3.4.
3.2. Floor-Adaptive Temporal Parameter Estimation
The temporal gait parameters we estimate include step time, stride time, stance time, swing time, single-support time, double-support time. These are critical time durations within a gait cycle.
Our approach for floor-adaptive temporal parameter estimation has four steps: 1) gait cycle segmentation, 2) floor-adaptive feature extraction, 3) foot strike and off time detection, and 4) temporal parameter estimation. Figure 10 shows the estimation process.
First, we detect gait cycles by grouping the previously detected individual footsteps. As introduced in Section 2.2.1, since a typical gait cycle has two foot strikes (including one foot’s strike and the opposite foot’s strike), we combine each pair of consecutive left and right footsteps as a gait cycle group.
Then, we develop floor adaptive algorithms to extract features from the vibration signals, which are the dominant frequency ranges at each gait event. As discussed in Figure 6 in Section 2.3.1, the main difference between the vibration signals from two different floors is the dominant frequency ranges at the foot strike and foot off. The dominant range for foot strike is typically around 10-30 Hz, and that of the foot off is around 60-200 Hz, depending on the type of floor. Therefore, we determine the dominant frequency range by cropping out the first 0-10% of the gait cycle (when foot strike occurs) and 60-70% of the gait cycle (when foot off occurs) to capture the floor difference. Although people’s walking patterns may vary due to individual habits, studies found that the proportion in a gait cycle when the foot strike and foot off occur are relatively consistent [52]. Therefore, the choice of these ranges captures the time when foot strike and foot off happen while allowing flexibility due to person-to-person variability. When a new trace of footsteps is observed from the same floor, we accelerate the process by skipping the dominant frequency extraction step.
Next, we detect foot strikes and off time to remove the effect of the floors. We start off by computing the sum of wavelet coefficients over frequency within the extracted dominant frequency ranges, resulting in two time series. The higher range is for foot strike and the lower range is for foot off based on the floor types characterization in Section 2.3.1. Then, we conduct peak-picking among the resultant wavelet coefficient time series to detect the time for foot strike and foot off. We apply a reverse sliding window starting from the peak to the valley to identify the time when the vibration starts to rise as the foot strike time. On the other hand, the peak of the lower frequency component is determined as the foot-off time because it is when damped free vibration starts to attenuate the signal. Finally, each gait cycle is segmented based on the foot strike and foot-off time to compute the temporal gait parameters.
Finally, given the estimated foot strike time and foot off time for the i-th gait cycle. As described in Figure 2 in Section 2.2.1, the gait parameters are estimated as follows:
- Step Time =
- Stride Time =
- Stance Time =
- Swing Time =
- Single-Support Time =
- Double-Support Time 1 =
- Double-Support Time 2 =
where is the previous gait cycle’s foot off (i.e., opposite foot off) and is the next gait cycle’s foot strike (i.e., opposite foot strike). For a given gait cycle, the single support time refers to the opposite swing phase. The first double support time is from the foot strike to the opposite foot off (the initial blue section at the opposite foot bar in Figure 2), and the second double support time is from the opposite foot strike to the current foot off time.
3.3. Floor-Adaptive Spatial Parameter Estimation
The spatial gait parameters we estimate include step length, stride length, step width, step angle. These are estimated based on the footstep location during walking, which is important evidence to assess mobility, symmetry, and balance in gaits.
Our approach for floor-adaptive temporal parameter estimation has four steps: 1) foot strike time estimation, 2) floor-adaptive velocity calibration, 3) footstep localization, and 4) spatial parameter estimation. Figure 11 shows the estimation process.
First, we estimate the time of foot strikes using the extracted dominant frequencies discussed in Section 3.2. This sets a foundation for wave arrival time detection. Then, we calibrate the floor heterogeneity caused by the variations in wave propagation velocity in order to achieve a higher accuracy in spatial parameter estimation, as discussed in Section 2.3.2. The calibration involves setting up a temporary camera that records the step location and time for several walking trials. Through a combined analysis of camera and vibration data, we can estimate the spatial distribution of the wave propagation velocity as developed in prior work [30]. To achieve this, we first estimate the wave arrival time by a peak-picking algorithm on signals between the foot-strike time and the time when the peak amplitude occurs in the high dominant frequency range. This is because the footstep force gradually increases after the initial contact with the floor, so the range of wave arrival time is always between the foot-strike time and the peak amplitude time. Then, we combine multiple sensors to finalize the wave arrival time. Since the sensor closer to the footstep typically receives the wave first, we select the arrival time sequence based on the sequence of footstep-to-sensor distances. With the wave arrival time and distance, we model the velocity profile based on Equation 4 in Section 2.3.2 to reduce the influence of outliers and wave propagation directions. The output of the calibration process is a velocity profile model of the cross-sectional area of the floor structure.
It is worth mentioning that our approach remains functional even without the camera-based calibration. In this case, the wave arrival time detection solely relies on the vibration data. Then, instead of estimating the velocity profile through cameras, we determine the wave propagation velocity of each footstep location by minimizing the area of possible footstep locations among three nearby sensors, as introduced in a previous study on vibration-based footstep localization [28]. The resultant wave propagation velocity at each footstep location is used as the velocity profile model.
Next, we leverage the estimated velocity profile model to enhance the localization performance of the TDoA method discussed in Section 2.2.2, where the difference of arrival time across multiple sensors is computed to estimate the footstep location [28]. To achieve this, we first estimate the range of wave propagation velocity based on the velocity profile model and the projected footstep location based on previous observations. Then, we compute TDoA over multiple sensors by subtracting the arrival time at the anchor sensor (the sensor with the largest signal amplitude). The location of the footstep is predicted through a grid search over the projected footstep range, where the location that leads to the lowest TDoA error is used.
Finally, the spatial gait parameters are computed according to Figure 3 in Section 2.2.2. Since the walking trajectory of an individual may not be perfectly straight, we estimate the walking trajectory for every three footsteps through a linear regression over the center points of the adjacent footstep locations. Given footstep , and described in Figure 12, the first walking trajectory segment is estimated as:
where and describes gradient and interceptions for the 1st walking trajectory segment. After repeating the calculation for all the walking trajectory segments, we form a complete walking trajectory (marked as a thick green line in Figure 12).
Then, we project each individual footstep to the walking trajectory (see the projection for and in Figure 12). Take the 3-rd footstep as an example, the projection distance w is computed as the step width, and the distance between projected points l is computed as the step length. Based on trigonometry, the detailed calculation is summarized below:
-
Step Length:
- Step Width:
- Step Angle:
- Stride Length:
where the angle is approximated based on the step length and width. The stride length is estimated by computing the sum of two adjacent step lengths.
3.4. Gait Health Indicator Extraction
The gait health indicators we extract include cadence/walking speed, left-right symmetry, gait balance, and initial contact type, which reflect different aspects of the gait. In this section, we develop a quantitative scale on these indicators through floor vibration signals and discuss the physical insights behind each formulation.
3.4.1. Cadence/Walking Speed Estimation
The cadence/step frequency is estimated by counting the number of footsteps per 10 seconds based on peak-picking on the sum of wavelet coefficients around the natural frequency range of the floor. For example, Figure 9 (right) shows that there are peaks (i.e., footsteps) within the 10-second window, which means the step frequency is steps/second and the cadence is steps/minute. The measurement is only related to the temporal aspect of the gait.
The walking speed, on the other hand, is related to both spatial and temporal information. In our approach, the walking speed is the step length divided by the step time, estimated as:
For example. if a person has a step length of 0.5 meters and a step time of 0.5 seconds, then the walking speed at that step is calculated as 1 m/s.
3.4.2. Left-Right Symmetry Estimation
In this study, we focus on the left-right symmetry during the stance time. This is because the stance time is when the foot contacts the floor, which directly associated with the force transmission through the body, manifesting the left-right weight distribution. We consider three aspects when assessing symmetry, including the 1) temporal, 2) spatial, and 3) kinetic measurements of the left and right foot. These correspond to the stance time, step length, and the signal energy normalized by the exponential of step-to-sensor distance.
With the above measurements, we describe symmetry using the absolute symmetry index (SI) as introduced in Section 2.2.3. This is because it does not require the classification of the left and right foot and focuses on the absolute difference between the two feet. The SI is defined as below:
where and refer to the measurements of the left and right foot. In our approach, the stance time and the step length are used for temporal and spatial SI. The kinetic measurement (i.e., the ground reaction force) is represented by the normalized signal energy. This is because our prior work found that the ground reaction force can be estimated through the signal energy compensated by the wave attenuation effect, which depends on the distance between the footstep and sensors [53].
3.4.3. Gait Balance Quantification
As discussed in Section 2.2.3, our approach describe gait balance based on the variability of walking to enable balance assessments in more realistic, non-clinical settings. Similar to the symmetry measurement, we consider three aspects when assessing balance, including 1) temporal, 2) spatial, and 3) kinetic measurements for balance, which corresponds to step time, step width, and the signal energy normalized by the exponential of the step-to-sensor distance. With the above measurements, we quantify gait balance by accumulating the difference between an individual footstep and the mean of all footsteps within the same trace. Specifically, we define the balance score (BS) as follows:
where is the measurement of an individual footstep, is the mean measurement of all footsteps within a trace, N is the number of footsteps in that trace. X corresponds to step time, step width, and normalized signal energy, respectively.
3.4.4. Initial Contact Type Prediction
The initial contact type is predicted by a machine learning pipeline using frequency domain features discussed in Section 2.2.3. First, we take the wavelet coefficients from the wavelet decomposition in Section 3.2 to compute the coefficient sum over the frequency axis. Then, we divide the frequency axis into 10-Hz frequency bins and compute the mean of each bin as features to represent different types of contacts. Next, we train a support vector machine model with a Gaussian kernel to capture the nonlinear dependencies among various frequency components and predict the initial contact type. To improve interpretability of the model predictions, we transform the model confidence score using a softmax function to produce the probability of each class. To this end, the outcome of this data pipeline is the probability of each initial contact type, allowing further decision-making by human experts.
4. Evaluation
To evaluate our approach, we conduct real-world experiments with 20 adults across concrete and wooden floors. In this section, we first introduce the experiment setup and then discuss the results for spatio-temporal gait parameter estimation and gait health indicator extraction. Moreover, we create diagrams to visualize the personal gait profiles, which summarize the estimated gait characteristics and compare them with the mean value among all participants. This provides an effective end-to-end pipeline to predict and visualize a person’s complex gait patterns through a simple diagram and enables visual detection of gait abnormalities.
4.1. Real-World Experiment Setup
The experiment involves two sets of sensors: 1) eight geophone sensors mounted on the surface of the floor for vibration data collection and 2) a Vicon Motion Capture (MoCap) system with 10 infrared cameras to record the ground truth of body movements during gait cycles [54]. The experiment is conducted in a large lab space consisting of two floor types that are commonly used for residential construction: 1) a mounted wooden structure with a wooden surface, and 2) a concrete walkway, which is part of the existing building. The MoCap cameras are mounted on the steel bars around this lab space, with adjustable shooting angles and movable tripods to adjust their locations. For each floor type, we installed four sensors at the side of the walking path, spaced 2 meters apart. Figure 13 shows the sample experiment setups for wood and concrete floors. The amplified analog signals are then converted into digital signals through NI-DAQ [55]. The sampling frequency is set to 25.6 kHz to maximize the temporal resolution of the vibration signals for research purposes; A lower sampling rate (around 5000 Hz) is typically sufficient for practical usages.
The experiment involves 20 participants (aged from 18 to 40 years old) walking across one or two types of walkways using their normal gait, and each repeated for 30 trials back and forth. During each walking trial, 16 markers are attached to the subject’s lower limbs, producing (x, y, z) coordinates of locomotion. The gait events are manually labeled, which include the “foot strike” and “foot off” time for each gait cycle. A total of 12,231 labeled gait cycles are collected and processed with the ground truth of spatio-temporal gait parameters.
4.2. Results and Discussion
Overall, our approach has achieved an average of 90.5% (RMSE 0.08s), 71.3% (RMSE 0.38m), 92.3% (RMSPE 7.7%) accuracy in estimating temporal, and spatial gait parameters, and gait health indicators, respectively. The accuracy is computed based on the percentage error rate over the absolute ground truth values to describe the overall performance. In this section, we demonstrate and discuss the performance in these three categories and then show the gait profile from all testing participants to visualize the individual differences in gait patterns.
4.2.1. Temporal Parameter Estimation Accuracy
For temporal parameter estimation, our approach has an average of 0.08-second root-mean-square error (RMSE) among all subjects. Figure 14 shows the detailed error rate for each parameter per person. The performance of our approach is comparable to the state-of-the-art approaches such as cameras, force plates, and wearables, which have error rates ranging from 5% to 20% as reported in previous studies [56,57,58]. Figure 14 shows the detailed error rate for each parameter per person. Overall, the estimation errors are relatively consistent among all subjects. Persons 3, 12, and 15 have slightly larger errors compared to the rest of the subjects. This is because they have larger variations in temporal parameter values, leading to a less accurate estimation of dominant frequency ranges.
The error distribution among various types of parameters is also consistent across all subjects. In particular, stride time has the largest error due to the error accumulation in step time estimations. Double support time has the lowest error because it has the shortest duration among all (typically around 0.2 seconds). When we compare the RMS percentage error, the double support time has the largest error rate (around 20%) while the step time and stride time have the lowest error rate (around 7%).
4.2.2. Spatial Parameter Estimation Accuracy
For spatial parameter estimation, our approach has an average of 0.38-meter length (RMSE) among all subjects, which means a 28.7% error rate when compared to the absolute value of spatial parameters. Our system achieved a error reduction over the baseline TDoA method developed in the previous study for localization [28].
Figure 15 shows the detailed error rate for each parameter per person. Similar to the temporal parameter estimation, the errors for spatial parameters are also relatively consistent among all subjects. We observe that persons 8, 9, and 19 have slightly larger errors than the rest of the subjects. This can result from the softer type of shoe they wear during the experiment while producing less impulsive signals during the initial contact, making it difficult to detect the exact time of wave arrival.
Interestingly, step location prediction has a significantly larger error than the step length estimation. This is because the localization error tends to bias towards the same direction due to the assumption of the same wave velocity across various directions. Therefore, the bias is mitigated by taking the Euclidean distance between the estimated locations of two adjacent footsteps.
Among the spatial parameters, step width has the lowest RMSE due to its small value (typically around 0.15 meters). When comparing the percentage errors, the stride length has the lowest error rate (only around 5% over the stride length value) while the step width has a high error rate (around 18% over the step width value). This is because the stride length is significantly larger than the width, and also has less variation within a person. While the step angle only has an RMSE of 1.44 degrees, the error rate of the step angle is high because all the subjects walked in a relatively straight line during the experiment, leading to small step angles in all recorded data.
4.2.3. Gait Health Indicator Extraction Accuracy
For gait health indicator extraction, our approach has an average of 7.7% root-mean-square percentage error (RMSPE) among all subjects. As shown in Figure 16.
The majority of the errors are less than 5% except for the spatial BS. This is because the spatial BS is computed based on the estimated step width, which has a large error rate due to its relatively smaller value compared to the spatial resolution. Such error propagates into the BS estimation. In fact, the accuracy of gait health indicators estimation significantly relies on the accuracy of the temporal and spatial parameter estimation. In this evaluation, we did not include the force SI, force BS, and contact type prediction because the ground truth (i.e., force measurement) is not available. According to prior work on vibration-based force and contact type estimation, the evaluation results for the force SI and force BS are 90.2% and 86%, respectively [32,53].
4.2.4. Personalized Gait Profile
To visualize the gait parameters and gait health indicators among each individual, we summarize all the results above and create personalized gait profiles for all human subjects. A personalized gait profile shows the deviation of each person’s gait from the average gait among all people during the experiment, which provides a direct visualization for the person to understand the style of walking compared to the others. In addition, these profiles can also help with detecting gait abnormalities and tracking rehabilitation stages for patients, which will be explored in our future work.
Figure 17 shows 4 typical profiles we observed from 20 subjects.
- Profile 1 “The Steady Walker": This person’s gait parameters are all within one standard deviation from the mean value. It means this person has a gait pattern that is close to the average of all walkers during the experiment. The person also has a low score for symmetry and balance, which indicates that the person has good symmetry and stability.
- Profile 2 “The Wide-Based Walker": This person has a significantly larger step width than the rest of the subjects. As a result, the stride length and step time may also increase due to the wide base. On the other hand, the footstep forces are less symmetrical and balanced compared to the other subjects. This may be the root cause of the large step width because a wider base can typically help to maintain balance.
- Profile 3 “The Large-Step Walker": This person has a significantly larger step length and step time than the rest of the subjects. This means that the person takes large steps so that the during of each step also increases. As a result, the person still has a high walking speed while having a low cadence. Based on our record, this is the tallest person among all subjects, which explains this special gait profile.
- Profile 4 “The Quick Walker": This person has significantly smaller values in all temporal parameters while keeping the spatial parameters around the average. This means that the person takes medium steps but with quick left-right foot alternations. As a result, the person has a high cadence and high walking speed.
We summarize the “subject mean” values of gait parameters from our study and compare them with the values from existing studies from a larger population, shown in Table 1.
As we observe from Table 1, the mean and standard deviation from our data are consistent with several previous datasets with larger sample sizes [41,59]. It is worth noting that the subjects in our data have slightly slower walking speeds due to the larger step lengths and longer step time. Therefore, the “subject mean” we used to generate gait profiles may be biased towards a slower walking pattern. Overall, the purpose of showing the “subject mean” is to provide a standard reference for medical practitioners to evaluate an individual’s walking style among the overall population, which is inspired by the standard clinical reports for joint angle assessment which also use the “subject mean” as a reference.
Meanwhile, it is worth noting that everyone has a unique gait profile due to individual differences. From our record, we observe that the variations among the subjects’ gait profiles can result from a mixture of complex reasons. For example, a person’s height and weight are found to be correlated with the step length and time [60]; a person’s emotional status can affect the step frequency [61]; also, the type of shoes a person is wearing can affect the entire gait profile [62]. In addition, we found that the left-right symmetry is affected by the leg length symmetry: there are 3 subjects that have asymmetrical left and right leg lengths (differ by around 1 inch), resulting in significantly higher SI and BS. In order to isolate the effect due to individual differences and develop a unified scale for various people, the visualization can be used as a tool to compare the dynamic changes in the same person over time. To this end, additional follow-up experiments with the same group of subjects are needed, which will be explored in future work.
4.3. Discussion on the Effect of Human and Environmental Variables
In this subsection, we discuss the effect of human and environmental variables on the performance of our approach, including the effect of floor types, sensor locations, walking paths, and the change in walking patterns (walking abnormalities).
4.3.1. Effect of Floor Types
Since floor structures at residential homes are mainly built with wood or concrete materials, we evaluated our approach on these two types of floors. Our characterization results in Section 2.3 validate the observation that changes in material properties mainly affect the dominant frequency and the wave propagation velocity. In addition, it is worth noting that extra soft flooring such as carpet tends to absorb the footstep force and significantly reduce the amplitude of floor vibration, which may fall below the sensitivity range of the geophones.
our approach has consistent results across the two most common floor types (i.e., wood and concrete) based on the data from subjects who walked on both floors, which produces an average of 2.8× and 2.3× error reduction compared to the baseline. As shown in Figure 18, the RMSE of our method on wood and concrete floors is significantly lower than that of the baseline method, despite that they follow similar trends among various parameters. The baseline method refers to the approach when there is no adaptation to floor types: 1) for temporal parameter estimation, the baseline does not consider the shift in dominant frequency ranges at foot strike and foot off, so it uses the same frequency range for the concrete floor as the wooden floor; 2) for spatial parameter estimation, the baseline does not estimate the velocity profile for the new floor and assumes the concrete floor has the same velocity profile as the wooden floor. The comparison shows that our approach is robust to various floor types.
4.3.2. Effect of Sensor Locations
The choice of sensor locations is important to achieve optimal performance of our approach system because they affect the data quality and the gait parameters derived from them. First, the distance between the sensors and the footstep is important. In general, the closer the sensors are to the source footstep the higher the signal-to-noise ratio (SNR) the vibration signals will have. However, if the sensors are too close, they may pose trip and fall hazards to the users. So an ideal distance will be around 1 meter away from the walking path. In our evaluation, the four sensors are located in different locations near the walkway, which allows comparison of the distance effect. Results show that sensors that are closer to the footsteps (within a 2-meter distance) have a 5-10% higher accuracy in estimating temporal parameters while having a similar accuracy in estimating spatial parameters. This is because larger signal amplitude leads to more accurate detection of foot strike/off time, while the TDoA approach for spatial estimation requires the wave to propagate for a certain distance in order to have sufficient resolution of time difference.
In addition, the relative location among sensors is important. Based on preliminary testing, we found that placing the sensors on both sides of the walkway has better performance than placing them on a single side, which results in slightly higher accuracy (3%-5% reduction in estimation error). This is because placing sensors at both sides captures more spatial information across the floor surface.
Moreover, the number of sensors should be sufficient to cover the area of the floor structure. Although four sensors are used in this evaluation to provide redundancy for sensitivity analysis and discussion, a typical sensing area of 15 on the wooden floor or 6 on the concrete floor can be covered by 1 sensor only. The cause of the difference is that the concrete floor is more rigid than the wooden floor, leading to more attenuation in the vibration wave. Our results show that using only one sensor (with an average data quality) still leads to similar accuracy in temporal gait parameter estimation, which means that the number of sensors can be reduced significantly in practice. However, the spatial parameter estimation requires at least three sensors in order to compute the time difference of wave arrival in a 2D plane.
4.3.3. Effect of Walking Paths
Walking path can have a significant impact on the frequency and amplitude of the vibration signals, mainly due to the 1) varying distance between the footstep and the sensor, and 2) heterogeneous layout of the structural components underneath the floor. The effect of distance between the footstep and the sensor is discussed in the previous Section 4.3.2, so we focus on the discussion of structural layout in this subsection. As a person walks, each footstep lands at a different location from the previous step, so the force is applied to a different location where the structural components underneath may change. For example, stepping on a beam typically produces slightly higher frequency and lower amplitude signals than walking in the middle of a floor slab. This is because the beam is typically more rigid and less flexible than the floor slab, and thus results in slightly higher vibration signal amplitude (∼0.2 V) and higher natural frequency (∼5 Hz) given the same footstep force. Therefore, a different walking path can result in changes in signal patterns, especially when the structural layout is significantly heterogeneous.
To understand the effect of the walking path due to the heterogeneous structural layout, we compare two walking directions (i.e., a person walks from left to right and vice versa in Figure 13) to ensure that the effect of footstep-to-sensor distance is minimized. Both wooden and concrete floor has consistent error rates for these two directions because the footstep locations in both paths cover diverse locations of various structural components. Therefore, slight changes in individual footsteps are not obvious when considering a large group of diverse footstep locations for overall performance. To better understand the cases when the walking path swings from side to side or turns in the middle, additional experiments are needed in the future to cover more areas of the structure.
4.3.4. Effect of Gait Abnormalities
Gait abnormalities are a group of walking patterns that deviate from the normal pattern, such as shuffling, dragging, and left-right asymmetry. These abnormal walking patterns affect the performance of our approach mainly through the varying signal amplitudes and irregular foot-floor contacts. For example, left-right asymmetry causes the signal amplitude to vary when the person is altering the left and right foot. This may lead to imprecise wave arrival time estimation because of the low SNR resulting from a significantly lighter footstep. On the other hand, dragging induces additional foot and floor contacts, making it challenging to detect and segment gait cycles. and thus bias the temporal gait parameter results. In order to design a system that is robust to gait abnormalities, further data collection and additional analysis are required to understand the vibration characteristics induced by each abnormality type. Given the large number of gait abnormality types, we plan to explore disease-oriented data models to tailor to the needs of a specific group of patients.
4.4. Comparison with the Existing Sensing Systems
In this subsection, we compare the performance of our approach with the existing sensing systems, including different sensing modalities and various sensor types within floor vibration sensing. The comparison covers both qualitative and quantitative perspectives.
4.4.1. Comparison among Different Sensing Modalities
From a qualitative perspective, our approach meets the requirements for gait analysis in non-clinical settings, allowing long-term and continuous gait health monitoring in daily life. Overall, floor vibration sensing has the benefits of being contactless, non-interruptive, wide-ranged, and is perceived as more privacy-friendly than cameras and microphones.
For quantitative comparison with the other sensing modalities, our approach has comparable error rates to the state-of-the-art sensing technologies in non-clinical settings. Previous studies have evaluated the accuracy of video cameras, pressure mats, wearable devices, and radio-frequency-based devices. These systems are reported to have around 0.01-0.1 seconds and 1-20 centimeters of error in temporal and spatial parameter estimation [63,64,65]. For comparison, our approach has an average of 0.08 second and 38-centimeter error for temporal and spatial parameter estimation, respectively. Although our approach has limited spatial performance due to the interference and the heterogeneity of the floor structures, it has satisfactory accuracy in temporal parameter estimation with various practical benefits such as low cost (less than $50 per sensor), easy installation and maintenance (plug into a power outlet and place on the floor, which is 1% data storage of the videos), large coverage (up to 20 meters per sensor, which is 0.01% of sensor density of the pressure mat), and no device carrying. Therefore, our approach is suitable for non-clinical settings that have fewer restrictions on accuracy requirements while being more convenient and can be operated in a longer term.
4.4.2. Comparison within the Floor Vibration Sensing
Within floor vibration sensing, existing studies have also utilized acceleration-based, displacement-based, acoustic-based, and velocity-based sensors, which has different sensitive ranges and noise levels depending on the sensing mechanism and configuration. This means that the data quality and the amount of gait information will also vary. For example, typical accelerometers are piezoelectric devices or MEMS (MicroElectroMechanical Systems), which can be sensitive to temperature or horizontal disturbances in the environment. In addition, displacement meters are typically expensive and require reference points for accurate measurement, which is not practical in measuring footstep-induced floor vibrations. On the other hand, acoustic-based sensors indirectly capture floor vibration through a secondary medium of air or solid, which may impair the signal-to-noise ratio (SNR). It is also noisier and can raise privacy concerns as it is sensitive to people’s conversations as well. Therefore, in this work, we use geophone sensors to sense the velocity of the floor vibration. This is because the sensitivity of geophones is relatively consistent across the frequency range of footstep-induced floor vibrations (10-200 Hz) and the sensing mechanism is less sensitive to noises due to temperature changes or lateral disturbances on the floor surface [66]. While this work focuses on geophone sensors, the developed approach is applicable to other vibration-based sensors with proper tuning of system parameters.
When we compare the performance of our approach with the existing work using floor vibration, our system covers the most comprehensive set of gait parameters ( to ) and has the largest subject size ( to ). Since the existing work did not estimate the majority of the gait parameters in our system, only a limited scope of comparison can be made. Specifically, previous work reported that the step time estimation is around 0.05 sec and the localization error is 0.42 m [29,33], which are similar to our results of 0.06 sec and 0.38 m. This shows that our system has a comparable accuracy as the prior work even when the number of subjects is significantly larger and the test cases (different floor types, walking directions, sensor locations) are much more complex.
5. Future Work
The evaluation results demonstrate promising results of using footstep-induced floor vibrations for extracting gait parameters and gait health information. In the future, we will explore the following topics to further advance the field:
- Explore downstream tasks for detection and tracking of neuromuscular/musculoskeletal disorders and estimation of fall risks: We will collect data from patients with a specific type of neurological/musculoskeletal disorder (e.g., Parkinson’s, cerebral palsy, muscular dystrophy) or who have higher risks of falls. By comparing the vibration signals from healthy individuals with those from patients, we can identify differences in gait parameters and use this information to develop algorithms that assist with early diagnosis and continuous tracking of their health conditions. Existing work with muscular dystrophy patients has obtained promising accuracy in disease detection [32].
- Conduct larger scale field experiment with more complex walking scenarios: We will conduct field experiments in more realistic and less controlled settings such as homes, hospitals, and public places, which will provide a better understanding of the generalizability of the system and the potential for ubiquitous adoption.
- Integrate with other sensing technologies: Our system has the potential to be integrated with other technologies such as wearable sensors/mobile devices/cameras. Such integration can provide users with a more accurate and comprehensive gait health assessment, capturing force, motion, and muscle activation. In addition, other sources of health records such as a person’s daily habits and medical/injury history can also be fused with the vibration data, which can enable personalized health recommendations and interventions, tailored to the individual’s unique needs.
6. Conclusion
In this study, we introduce a novel approach for gait analysis using footstep-induced floor vibrations. Compared with existing work using wearables, cameras, and force plates, our approach is non-intrusive, scalable, and perceived as more privacy-friendly, enabling continuous gait health monitoring at home. To develop our approach, we systematically characterize gait parameters and health indicators and their relationships with gait-induced floor vibrations. To overcome the influence of floor types on the vibration signals, we characterize the vibrations on different floors and develop feature extraction algorithms that are insensitive to the floor but sensitive to gait parameters. we evaluate our approach through field walking experiments with 20 human subjects across two typical floor types and obtain an average of 90.5% (RMSE 0.08s), 71.3% (RMSE 0.38m), 92.3% (RMSPE 7.7%) accuracy in estimating temporal, spatial parameters and gait health indicators, respectively. To assist with clinical interpretation, we develop a visualization tool to provide an informative summary of a person’s gait pattern.
Author Contributions
Conceptualization, Y.D. and H.N.; methodology, Y.D. and H.N.; software, Y.D.; validation, Y.D.; formal analysis, Y.D.; investigation, Y.D.; resources, Y.D.; data curation, Y.D.; writing—original draft preparation, Y.D.; writing—review and editing, Y.D. and H.N.; visualization, Y.D.; supervision, H.N.; project administration, Y.D. and H.N.; funding acquisition, H.N. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Science Foundation (under grant CMMI-2026699).
Institutional Review Board Statement
The study was conducted in accordance with the Declaration of Helsinki, and approved by the Institutional Review Board (or Ethics Committee) of Stanford University (approval for protocol number IRB-55372 on date 08/28/2020).
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
The de-identified data presented in this study are available on request from the corresponding author.
Acknowledgments
This research was supported in part by the National Science Foundation (under grant CMMI-2026699). The authors would like to extend sincere thanks to Nomin-Erdene Bayarsaikhan for helping with data labeling, and thanks to Jingxiao Liu, Yuyan Wu, Jatin Aggarwal, Amelie Bonde, Adeola Bannis, Kevin Wilfong, Ziqun Ye, Helen Zhang, Mo Wu, Xiran Shi, Xinyu Hu, and Peide Huang for their great support with the experiments.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Kirtley, C. Chapter 1 - The temporal-spatial parameters. In Clinical Gait Analysis; Kirtley, C., Ed.; Churchill Livingstone: Edinburgh, 2006; pp. 15–37. [Google Scholar] [CrossRef]
- Baker, R. Gait analysis methods in rehabilitation. Journal of neuroengineering and rehabilitation 2006, 3, 1–10. [Google Scholar] [CrossRef]
- Whittle, M.W. Gait analysis: an introduction; Butterworth-Heinemann: 2014.
- Kharb, A.; Saini, V.; Jain, Y.; Dhiman, S. A review of gait cycle and its parameters. IJCEM International Journal of Computational Engineering & Management 2011, 13, 78–83. [Google Scholar]
- Sadeghi, H.; Allard, P.; Prince, F.; Labelle, H. Symmetry and limb dominance in able-bodied gait: a review. Gait & posture 2000, 12, 34–45. [Google Scholar]
- Chang, F.M.; Rhodes, J.T.; Flynn, K.M.; Carollo, J.J. The role of gait analysis in treating gait abnormalities in cerebral palsy. Orthopedic Clinics 2010, 41, 489–506. [Google Scholar] [CrossRef] [PubMed]
- Morgan, D.; Funk, M.; Crossley, M.; Basran, J.; Kirk, A.; Dal Bello-Haas, V. The potential of gait analysis to contribute to differential diagnosis of early stage dementia: current research and future directions. Canadian Journal on Aging/La Revue canadienne du vieillissement 2007, 26, 19–32. [Google Scholar] [CrossRef] [PubMed]
- Von Schroeder, H.P.; Coutts, R.D.; Lyden, P.D.; Billings, E.; Nickel, V.L. Gait parameters following stroke: a practical assessment. Journal of rehabilitation research and development 1995, 32, 25–25. [Google Scholar]
- Cebolla, E.C.; Rodacki, A.L.; Bento, P.C. Balance, gait, functionality and strength: comparison between elderly fallers and non-fallers. Brazilian journal of physical therapy 2015, 19, 146–151. [Google Scholar] [CrossRef] [PubMed]
- Bergen, G.; Stevens, M.R.; Burns, E.R. Falls and fall injuries among adults aged ≥ 65 years—United States, 2014. Morbidity and Mortality Weekly Report 2016, 65, 993–998. [Google Scholar] [CrossRef] [PubMed]
- Sutherland, D.H. The evolution of clinical gait analysis part I: kinesiological EMG. Gait & posture 2001, 14, 61–70. [Google Scholar]
- Sutherland, D.H. The evolution of clinical gait analysis: Part II Kinematics. Gait & posture 2002, 16, 159–179. [Google Scholar]
- Sutherland, D.H. The evolution of clinical gait analysis part III–kinetics and energy assessment. Gait & posture 2005, 21, 447–461. [Google Scholar]
- Simon, S.R. Quantification of human motion: gait analysis—benefits and limitations to its application to clinical problems. Journal of biomechanics 2004, 37, 1869–1880. [Google Scholar] [CrossRef]
- Yang, C.; Ugbolue, U.C.; Kerr, A.; Stankovic, V.; Stankovic, L.; Carse, B.; Kaliarntas, K.T.; Rowe, P.J. Autonomous gait event detection with portable single-camera gait kinematics analysis system. Journal of Sensors 2016, 2016. [Google Scholar] [CrossRef]
- Muro-De-La-Herran, A.; Garcia-Zapirain, B.; Mendez-Zorrilla, A. Gait analysis methods: An overview of wearable and non-wearable systems, highlighting clinical applications. Sensors 2014, 14, 3362–3394. [Google Scholar] [CrossRef] [PubMed]
- Tao, W.; Liu, T.; Zheng, R.; Feng, H. Gait analysis using wearable sensors. Sensors 2012, 12, 2255–2283. [Google Scholar] [CrossRef] [PubMed]
- Givon, U.; Zeilig, G.; Achiron, A. Gait analysis in multiple sclerosis: characterization of temporal–spatial parameters using GAITRite functional ambulation system. Gait & posture 2009, 29, 138–142. [Google Scholar]
- di Biase, L.; Pecoraro, P.M.; Pecoraro, G.; Caminiti, M.L.; Di Lazzaro, V. Markerless radio frequency indoor monitoring for telemedicine: gait analysis, indoor positioning, fall detection, tremor analysis, vital signs and sleep monitoring. Sensors 2022, 22, 8486. [Google Scholar] [CrossRef]
- Drira, S.; Reuland, Y.; Olsen, N.F.; Pai, S.G.; Smith, I.F. Occupant-detection strategy using footstep-induced floor vibrations. In Proceedings of the Proceedings of the 1st ACM International Workshop on Device-Free Human Sensing, 2019, pp. 31–34. [CrossRef]
- Alwan, M.; Rajendran, P.J.; Kell, S.; Mack, D.; Dalal, S.; Wolfe, M.; Felder, R. A smart and passive floor-vibration based fall detector for elderly. In Proceedings of the 2006 2nd International Conference on Information & Communication Technologies. IEEE, 2006, Vol. 1, pp. 1003–1007. [CrossRef]
- Pan, S.; Mirshekari, M.; Zhang, P.; Noh, H.Y. Occupant traffic estimation through structural vibration sensing. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2016. SPIE, 2016, Vol. 9803, pp. 41–52. [CrossRef]
- Pan, S.; Berges, M.; Rodakowski, J.; Zhang, P.; Noh, H.Y. Fine-Grained Activity of Daily Living (ADL) Recognition Through Heterogeneous Sensing Systems With Complementary Spatiotemporal Characteristics. Frontiers in Built Environment 2020, 6. [Google Scholar] [CrossRef]
- Pan, S.; Yu, T.; Mirshekari, M.; Fagert, J.; Bonde, A.; Mengshoel, O.J.; Noh, H.Y.; Zhang, P. Footprintid: Indoor pedestrian identification through ambient structural vibration sensing. Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies 2017, 1, 1–31. [Google Scholar] [CrossRef]
- Dong, Y.; Fagert, J.; Zhang, P.; Noh, H.Y. Stranger Detection and Occupant Identification Using Structural Vibrations. In Proceedings of the European Workshop on Structural Health Monitoring: EWSHM 2022-Volume 1. Springer, 2022, pp. 905–914. [CrossRef]
- Drira, S.; Reuland, Y.; Pai, S.G.; Noh, H.Y.; Smith, I.F. Model-based occupant tracking using slab-vibration measurements. Frontiers in Built Environment 2019, 5, 63. [Google Scholar] [CrossRef]
- Davis, B.T.; Caicedo, J.M.; Hirth, V.A. Force estimation and event localization (feel) of impacts using structural vibrations. Journal of Engineering Mechanics 2021, 147, 04020154. [Google Scholar] [CrossRef]
- Mirshekari, M.; Pan, S.; Fagert, J.; Schooler, E.M.; Zhang, P.; Noh, H.Y. Occupant localization using footstep-induced structural vibration. Mechanical Systems and Signal Processing 2018, 112, 77–97. [Google Scholar] [CrossRef]
- Hahm, K.S.; Anthony, B.W. In-home Health Monitoring using Floor-based Gait Tracking. Internet of Things 2022, 19, 100541. [Google Scholar] [CrossRef]
- Dong, Y.; Liu, J.; Noh, H.Y. GaitVibe+: Enhancing Structural Vibration-based Footstep Localization Using Temporary Cameras for In-home Gait Analysis. arXiv preprint arXiv:2212.03377 2022. arXiv:2212.03377 2022. [CrossRef]
- Alwan, M.; Dalal, S.; Kell, S.; Felder, R.; et al. Derivation of basic human gait characteristics from floor vibrations. In Proceedings of the 2003 Summer Bioengineering Conference, June, 2003, pp. 25–29.
- Dong, Y.; Zou, J.J.; Liu, J.; Fagert, J.; Mirshekari, M.; Lowes, L.; Iammarino, M.; Zhang, P.; Noh, H.Y. MD-Vibe: physics-informed analysis of patient-induced structural vibration data for monitoring gait health in individuals with muscular dystrophy. In Proceedings of the Adjunct proceedings of the 2020 ACM international joint conference on pervasive and ubiquitous computing and proceedings of the 2020 ACM international symposium on wearable computers, 2020, pp. 525–531. [CrossRef]
- Dong, Y.; Noh, H.Y. Structure-Agnostic Gait Cycle Segmentation for In-Home Gait Health Monitoring through Footstep-Induced Structural Vibrations. https://doi.org/10.1007/978-3-031-36663-58. [CrossRef]
- Mirshekari, M.; Fagert, J.; Pan, S.; Zhang, P.; Noh, H.Y. Step-level occupant detection across different structures through footstep-induced floor vibration using model transfer. Journal of Engineering Mechanics 2020, 146, 04019137. [Google Scholar] [CrossRef]
- Dong, Y.; Zhu, J.; Noh, H.Y. Re-vibe: vibration-based indoor person re-identification through cross-structure optimal transport. In Proceedings of the Proceedings of the 9th ACM International Conference on Systems for Energy-Efficient Buildings, Cities, and Transportation, 2022, pp. 348–352. [CrossRef]
- Rainer, J.; Pernica, G. Vertical dynamic forces from footsteps. Canadian Acoustics 1986, 14, 12–21. [Google Scholar]
- Mazarakis, G.P.; Avaritsiotis, J.N. A prototype sensor node for footstep detection. In Proceedings of the Proceeedings of the Second European Workshop on Wireless Sensor Networks, 2005. IEEE, 2005, pp. 415–418. [CrossRef]
- Allen, D.E.; Pernica, G. Control of floor vibration; Institute for Research in Construction Ottawa, 1998.
- Toratti, T.; Talja, A. Classification of human induced floor vibrations. Building acoustics 2006, 13, 211–221. [Google Scholar] [CrossRef]
- Krohn, C.E. Geophone ground coupling. Geophysics 1984, 49, 722–731. [Google Scholar] [CrossRef]
- Öberg, T.; Karsznia, A.; Öberg, K. Basic gait parameters: reference data for normal subjects, 10-79 years of age. Journal of rehabilitation research and development 1993, 30, 210–210. [Google Scholar]
- Hof, A.L.; van Bockel, R.M.; Schoppen, T.; Postema, K. Control of lateral balance in walking: experimental findings in normal subjects and above-knee amputees. Gait & posture 2007, 25, 250–258. [Google Scholar]
- Patterson, K.K.; Gage, W.H.; Brooks, D.; Black, S.E.; McIlroy, W.E. Evaluation of gait symmetry after stroke: A comparison of current methods and recommendations for standardization. Gait & Posture 2010, 31, 241–246. [Google Scholar] [CrossRef]
- Godi, M.; Franchignoni, F.; Caligari, M.; Giordano, A.; Turcato, A.M.; Nardone, A. Comparison of reliability, validity, and responsiveness of the mini-BESTest and Berg Balance Scale in patients with balance disorders. Physical therapy 2013, 93, 158–167. [Google Scholar] [CrossRef]
- Brach, J.S.; Studenski, S.; Perera, S.; VanSwearingen, J.M.; Newman, A.B. Stance time and step width variability have unique contributing impairments in older persons. Gait & posture 2008, 27, 431–439. [Google Scholar]
- Oetgen, M.E.; Peden, S. Idiopathic toe walking. JAAOS-Journal of the American Academy of Orthopaedic Surgeons 2012, 20, 292–300. [Google Scholar] [CrossRef]
- Alvarez, C.; De Vera, M.; Beauchamp, R.; Ward, V.; Black, A. Classification of idiopathic toe walking based on gait analysis: development and application of the ITW severity classification. Gait & posture 2007, 26, 428–435. [Google Scholar]
- Hicks, R.; Durinick, N.; Gage, J.R. Differentiation of idiopathic toe-walking and cerebral palsy. Journal of pediatric orthopedics 1988, 8, 160–163. [Google Scholar] [CrossRef]
- Sensor Nederlands, B. SM-24 geophone element. Online: http://www. iongeo. com/Products_Services/Land_Systems/Geophones.
- Chen, J.; Benesty, J.; Huang, Y.; Doclo, S. New insights into the noise reduction Wiener filter. IEEE Transactions on audio, speech, and language processing 2006, 14, 1218–1234. [Google Scholar] [CrossRef]
- Büssow, R. An algorithm for the continuous Morlet wavelet transform. Mechanical Systems and Signal Processing 2007, 21, 2970–2979. [Google Scholar] [CrossRef]
- Brach, J.S.; Perera, S.; Studenski, S.; Katz, M.; Hall, C.; Verghese, J. Meaningful change in measures of gait variability in older adults. Gait & Posture 2010, 31, 175–179. [Google Scholar]
- Fagert, J.; Mirshekari, M.; Pan, S.; Lowes, L.; Iammarino, M.; Zhang, P.; Noh, H.Y. Structure-and sampling-adaptive gait balance symmetry estimation using footstep-induced structural floor vibrations. Journal of Engineering Mechanics 2021, 147, 04020151. [Google Scholar] [CrossRef]
- Windolf, M.; Götzen, N.; Morlock, M. Systematic accuracy and precision analysis of video motion capturing systems—exemplified on the Vicon-460 system. Journal of biomechanics 2008, 41, 2776–2780. [Google Scholar] [CrossRef] [PubMed]
- Manual, M.S.U. DAQ M Series 2008.
- Wall, J.; Crosbie, J. Accuracy and reliability of temporal gait measurement. Gait & Posture 1996, 4, 293–296. [Google Scholar]
- Xu, X.; McGorry, R.W.; Chou, L.S.; Lin, J.h.; Chang, C.c. Accuracy of the Microsoft Kinect™ for measuring gait parameters during treadmill walking. Gait & posture 2015, 42, 145–151. [Google Scholar]
- Mansour, K.B.; Rezzoug, N.; Gorce, P. Analysis of several methods and inertial sensors locations to assess gait parameters in able-bodied subjects. Gait & Posture 2015, 42, 409–414. [Google Scholar]
- Stolze, H.; Kuhtz-Buschbeck, J.; Mondwurf, C.; Jöhnk, K.; Friege, L. Retest reliability of spatiotemporal gait parameters in children and adults. Gait & posture 1998, 7, 125–130. [Google Scholar]
- Enright, P.L.; Sherrill, D.L. Reference equations for the six-minute walk in healthy adults. American journal of respiratory and critical care medicine 1998, 158, 1384–1387. [Google Scholar] [CrossRef] [PubMed]
- Roether, C.L.; Omlor, L.; Christensen, A.; Giese, M.A. Critical features for the perception of emotion from gait. Journal of vision 2009, 9, 15–15. [Google Scholar] [CrossRef]
- Doi, T.; Yamaguchi, R.; Asai, T.; Komatsu, M.; Makiura, D.; Shimamura, M.; Hirata, S.; Ando, H.; Kurosaka, M. The effects of shoe fit on gait in community-dwelling older adults. Gait & posture 2010, 32, 274–278. [Google Scholar]
- Uhlrich, S.D.; Falisse, A.; Kidziński, .; Muccini, J.; Ko, M.; Chaudhari, A.S.; Hicks, J.L.; Delp, S.L. OpenCap: 3D human movement dynamics from smartphone videos. BioRxiv 2022, pp. 2022–07.
- Abinaya, B.; Latha, V.; Suchetha, M. An advanced gait monitoring system based on air pressure sensor embedded in a shoe. Procedia Engineering 2012, 38, 1634–1643. [Google Scholar] [CrossRef]
- Lin, F.; Wang, A.; Zhuang, Y.; Tomita, M.R.; Xu, W. Smart Insole: A Wearable Sensor Device for Unobtrusive Gait Monitoring in Daily Life. IEEE Transactions on Industrial Informatics 2016, 12, 2281–2291. [Google Scholar] [CrossRef]
- Wei, J. Comparing the MEMS accelerometer and the analog geophone. The Leading Edge 2013, 32, 1206–1210. [Google Scholar] [CrossRef]
Figure 1.
Our approach uses vibration sensors to capture the floor vibrations generated by footsteps during walking (left). We develop algorithms to analyze these vibrations, which produce estimates of spatial, and temporal gait parameters and gait health indicators (represented by the three different colored lines on the right). The outcome of our approach is a personalized gait profile for individuals to understand their gait health compared with the average gait from all people (gray dashed line).
Figure 1.
Our approach uses vibration sensors to capture the floor vibrations generated by footsteps during walking (left). We develop algorithms to analyze these vibrations, which produce estimates of spatial, and temporal gait parameters and gait health indicators (represented by the three different colored lines on the right). The outcome of our approach is a personalized gait profile for individuals to understand their gait health compared with the average gait from all people (gray dashed line).
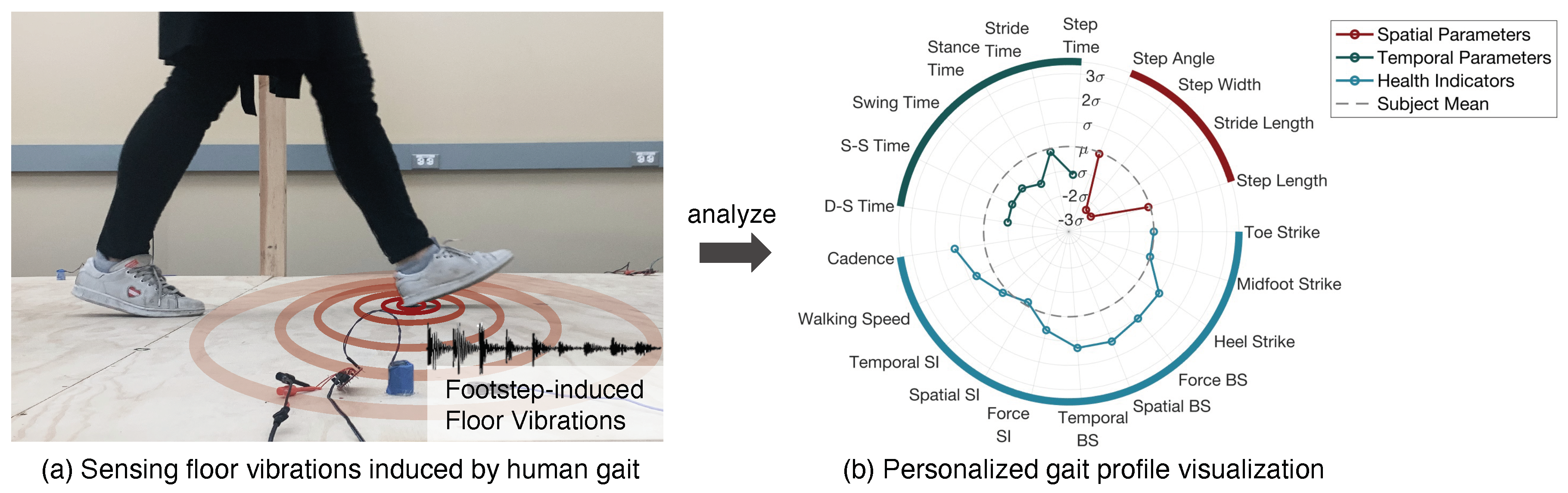
Figure 2.
Visualization of temporal gait parameters with respect to footstep-induced structural vibration signals on a wooden floor: the foot strike and foot off divide the gait cycle into stance and swing phases. A normal foot strike occurs at the valley right before the high-frequency peak, while a normal foot-off occurs at the peaks around the natural frequency range of the structure.
Figure 2.
Visualization of temporal gait parameters with respect to footstep-induced structural vibration signals on a wooden floor: the foot strike and foot off divide the gait cycle into stance and swing phases. A normal foot strike occurs at the valley right before the high-frequency peak, while a normal foot-off occurs at the peaks around the natural frequency range of the structure.
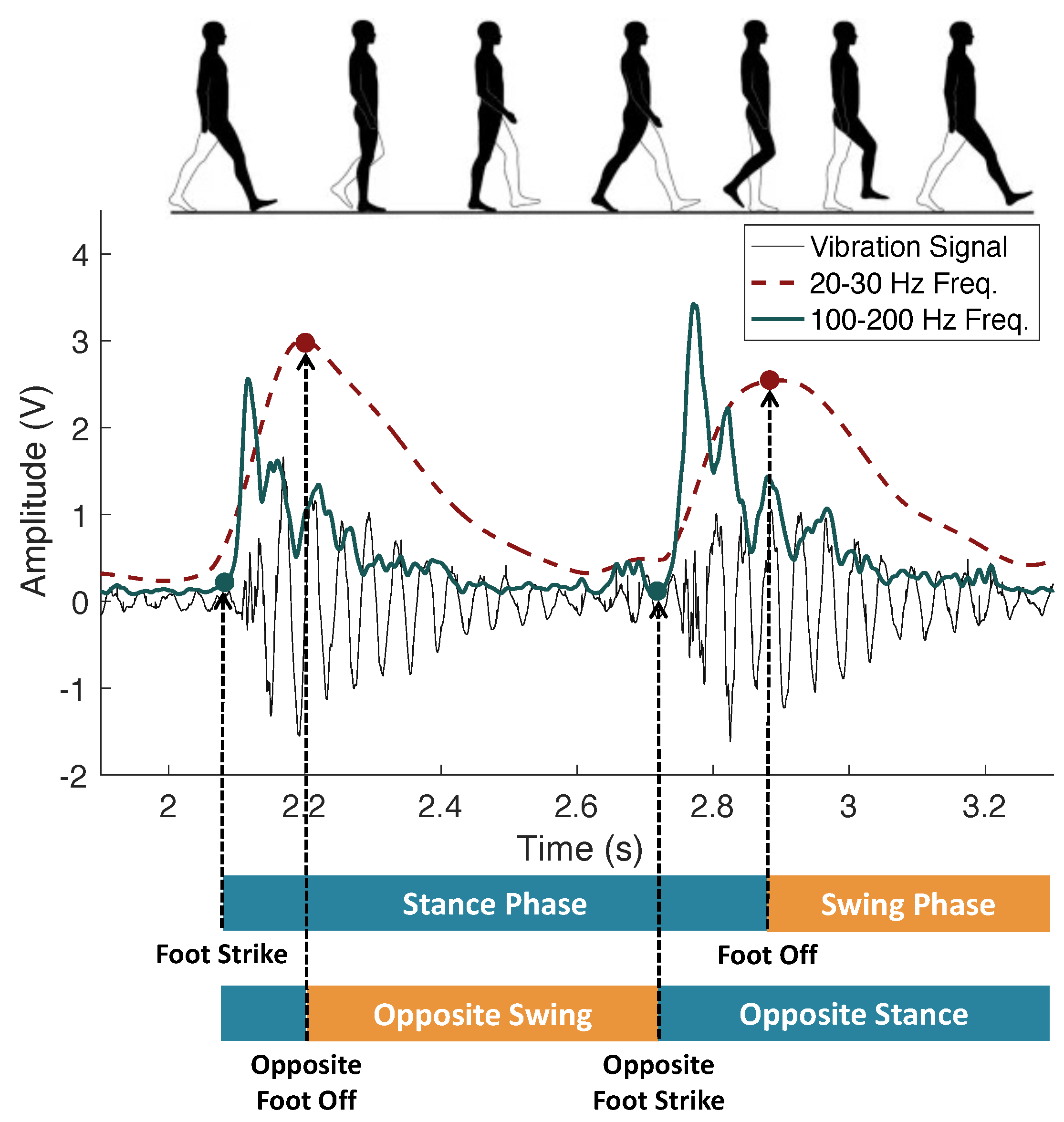
Figure 3.
An overview of the spatial gait parameters estimated in this work.
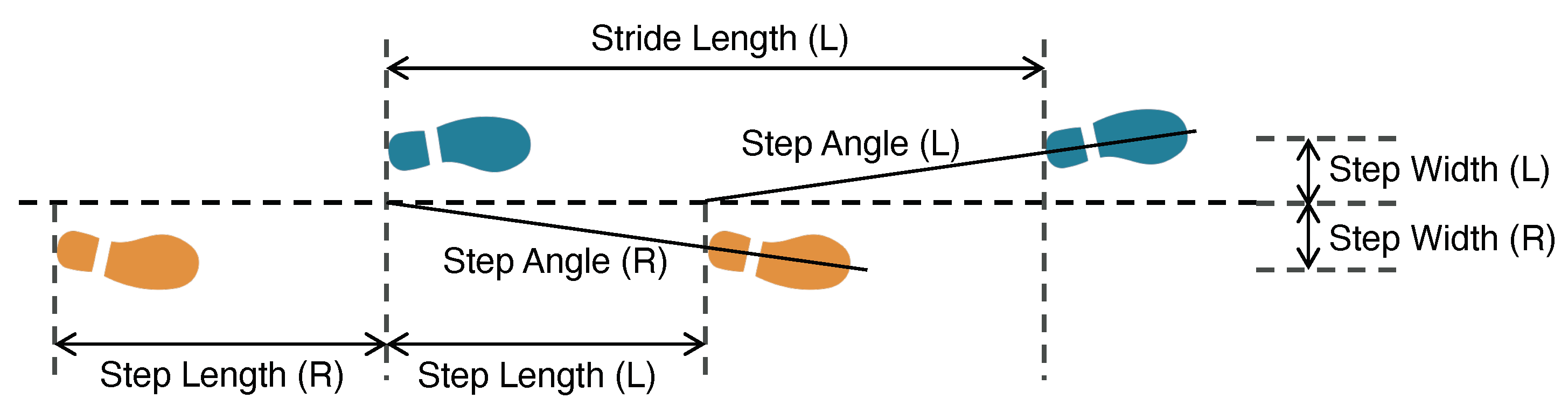
Figure 4.
Heterogeneity in wave propagation velocity observed based on (a) wave propagation distance and (b) wave propagation time. Distance and time have different trends, meaning that the velocities vary among different footstep locations.
Figure 4.
Heterogeneity in wave propagation velocity observed based on (a) wave propagation distance and (b) wave propagation time. Distance and time have different trends, meaning that the velocities vary among different footstep locations.
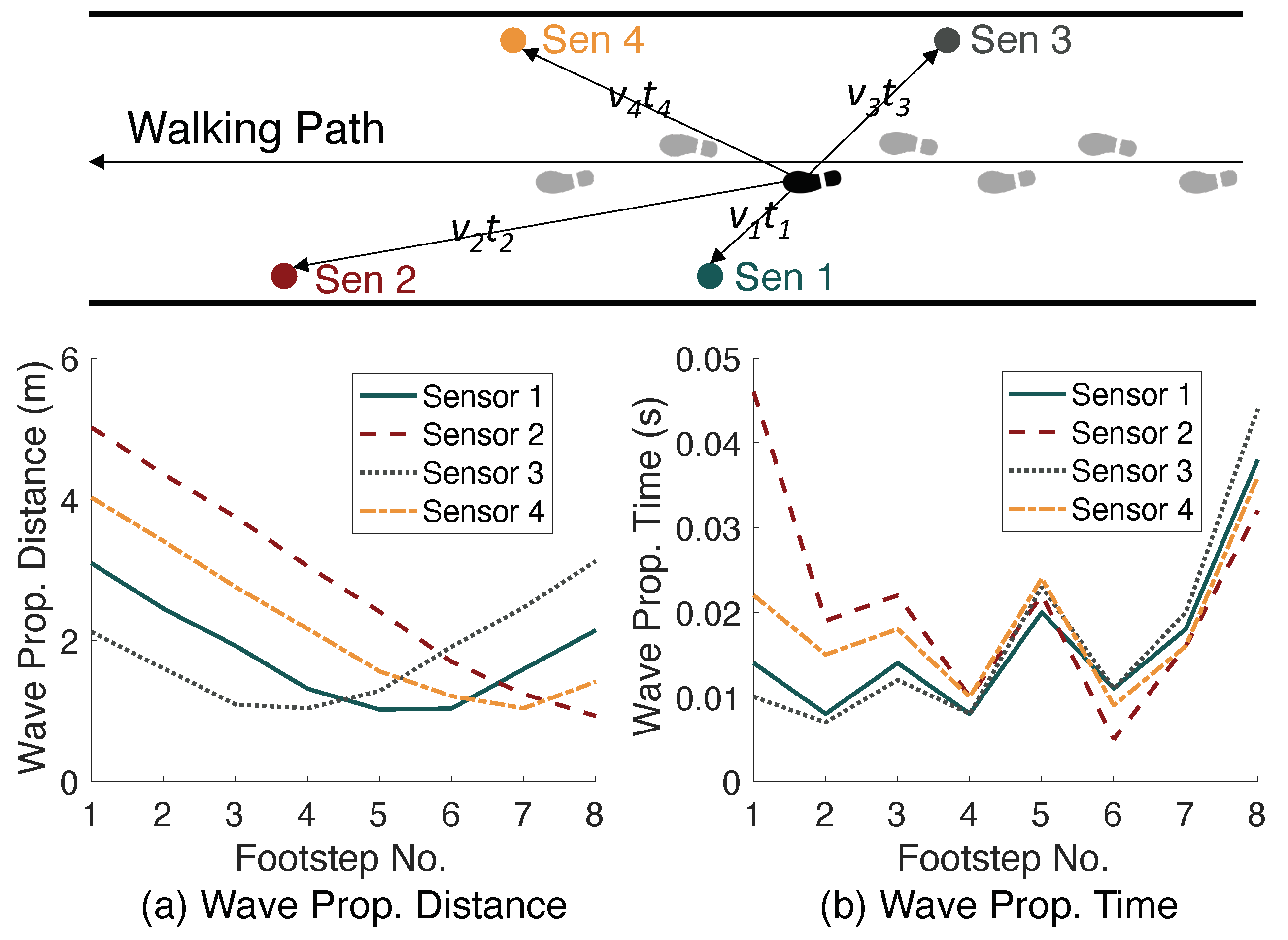
Figure 5.
Examples on the wavelet domain of floor vibration signals under three types of initial contacts. The areas within the white circles show distinct dominant frequency patterns across various initial contact types.
Figure 5.
Examples on the wavelet domain of floor vibration signals under three types of initial contacts. The areas within the white circles show distinct dominant frequency patterns across various initial contact types.
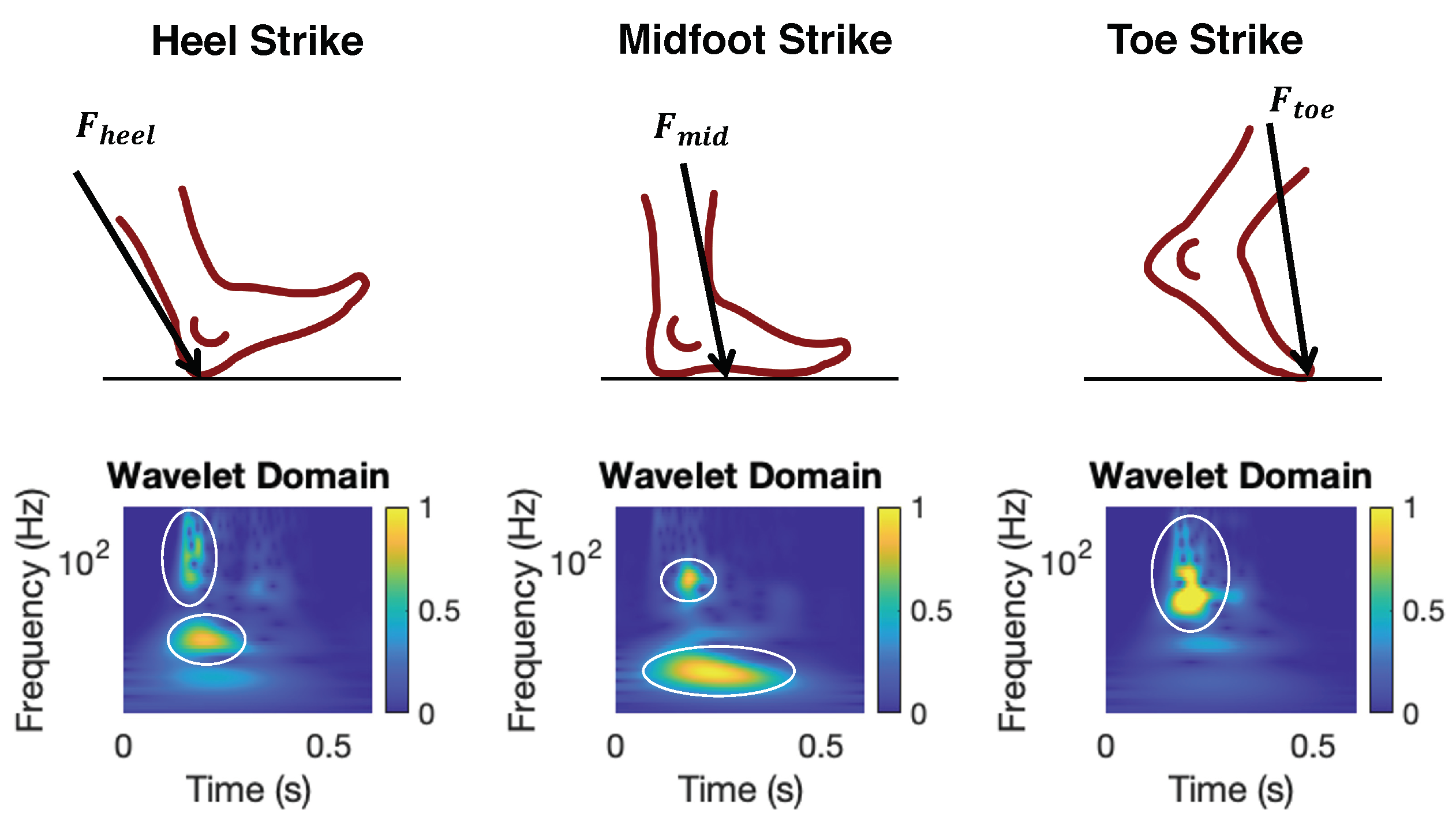
Figure 6.
Floor vibrations induced by a person walking on two types of floors (a) concrete, (b) wooden floor. The major gait events are captured in different dominant frequency ranges by the wavelet coefficient map.
Figure 6.
Floor vibrations induced by a person walking on two types of floors (a) concrete, (b) wooden floor. The major gait events are captured in different dominant frequency ranges by the wavelet coefficient map.
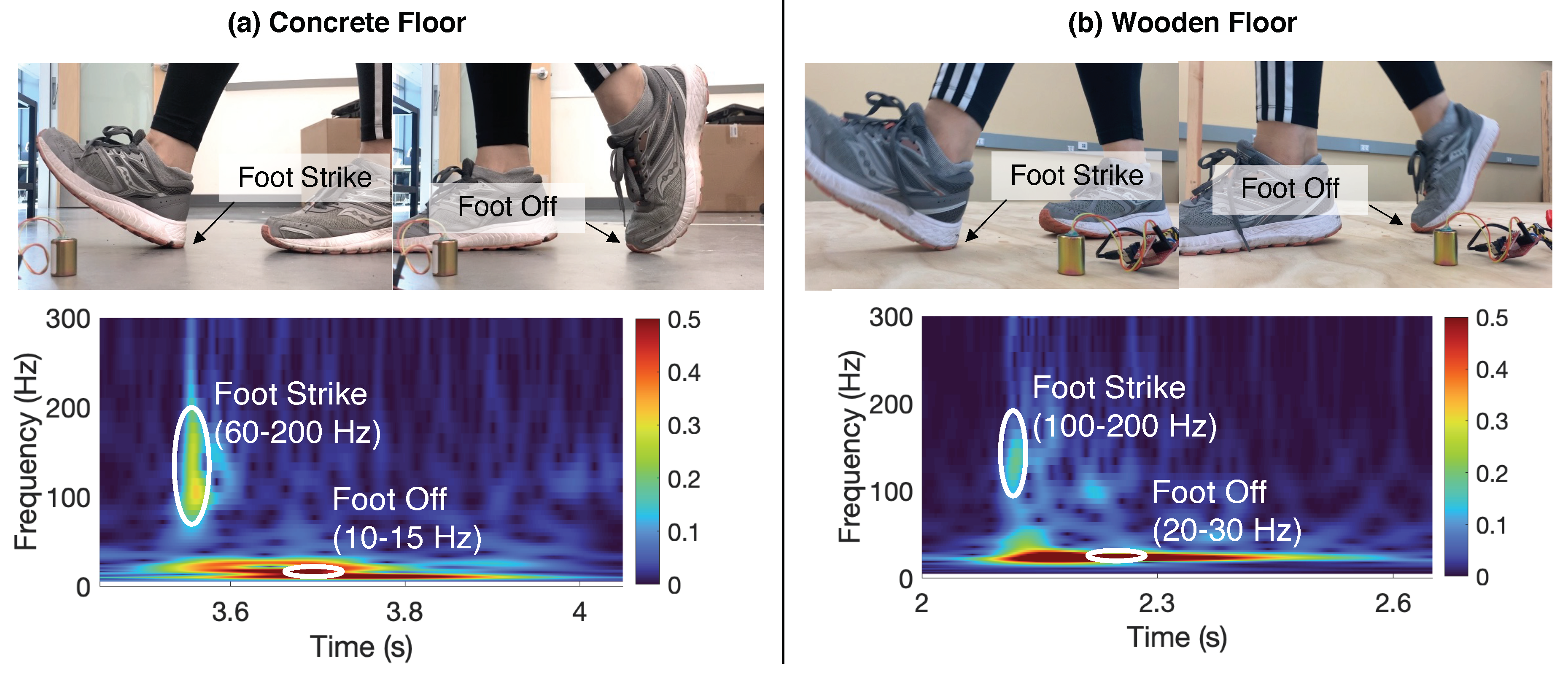
Figure 7.
Visualization of velocity profile models for wooden and concrete floors, respectively. Overall, the velocity profile correlates well with the structural layout - the symmetrical wooden floor structure has a symmetrical velocity profile, and the asymmetrical concrete spans are reflected in the asymmetrical velocity profile. The velocity in concrete is generally higher than that in wood.
Figure 7.
Visualization of velocity profile models for wooden and concrete floors, respectively. Overall, the velocity profile correlates well with the structural layout - the symmetrical wooden floor structure has a symmetrical velocity profile, and the asymmetrical concrete spans are reflected in the asymmetrical velocity profile. The velocity in concrete is generally higher than that in wood.
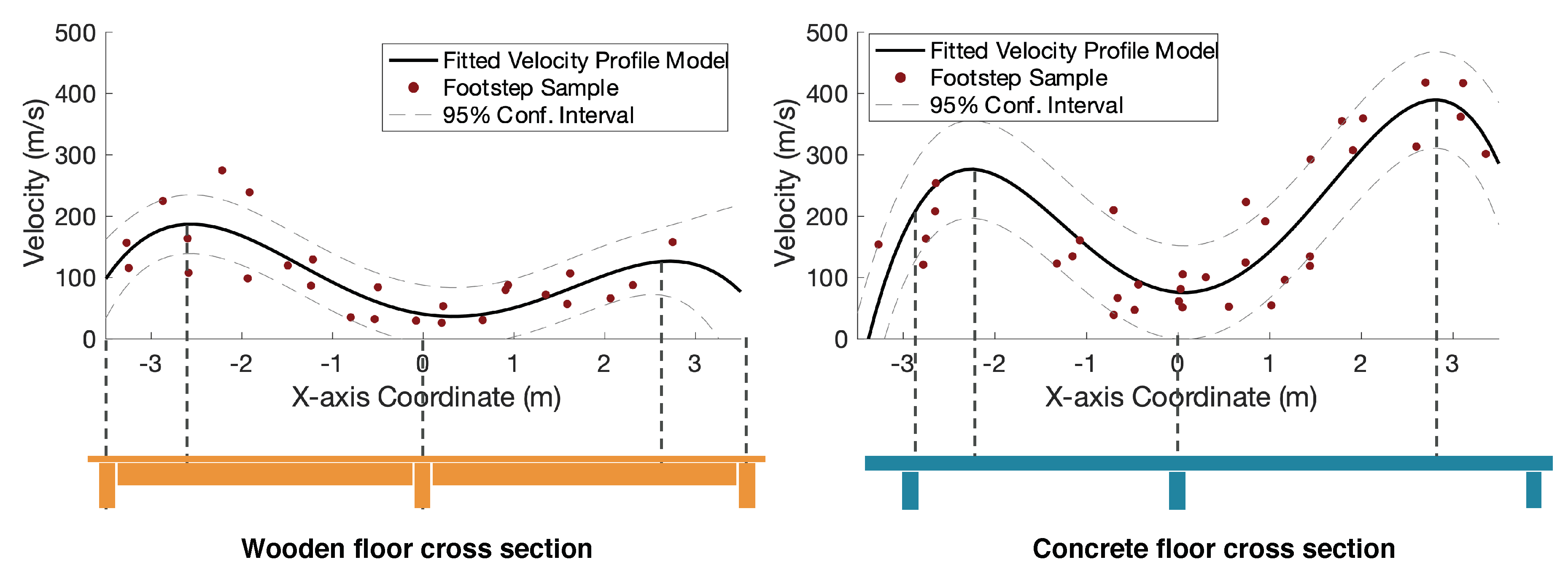
Figure 8.
The framework of gait analysis through footstep-induced floor vibrations has four modules (red boxes), including 1) sensing and pre-processing, 2) floor-adaptive temporal parameter estimation, 3) floor-adaptive spatial parameter estimation, and 4) gait health indicator extraction. The data flow pipeline is represented by back solid lines. The outcomes of the framework are highlighted in green-colored text.
Figure 8.
The framework of gait analysis through footstep-induced floor vibrations has four modules (red boxes), including 1) sensing and pre-processing, 2) floor-adaptive temporal parameter estimation, 3) floor-adaptive spatial parameter estimation, and 4) gait health indicator extraction. The data flow pipeline is represented by back solid lines. The outcomes of the framework are highlighted in green-colored text.
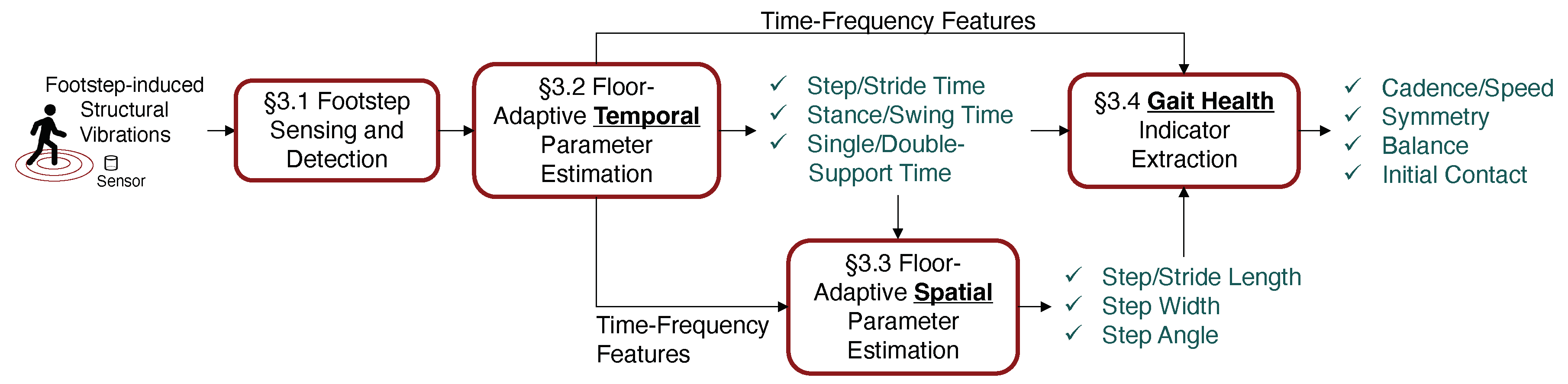
Figure 9.
Footstep-induced floor vibration sensing using geophone sensors mounted on the floor surface (left). A sample series of detected footsteps through peak-picking of the wavelet coefficients (right).
Figure 9.
Footstep-induced floor vibration sensing using geophone sensors mounted on the floor surface (left). A sample series of detected footsteps through peak-picking of the wavelet coefficients (right).
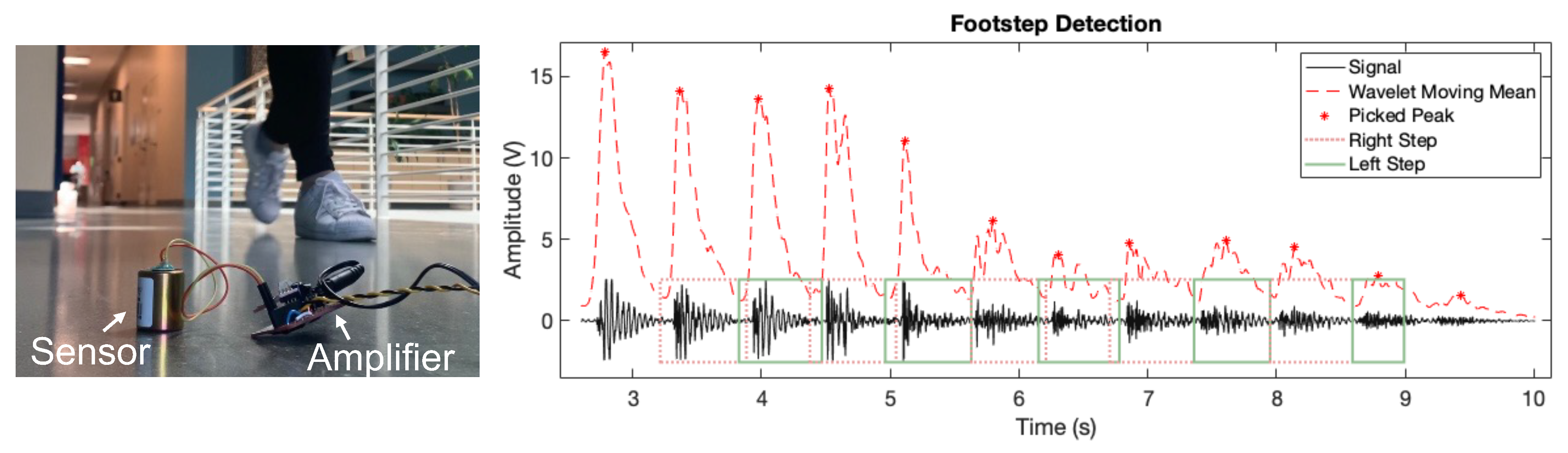
Figure 10.
An overview of the temporal gait parameter estimation process.
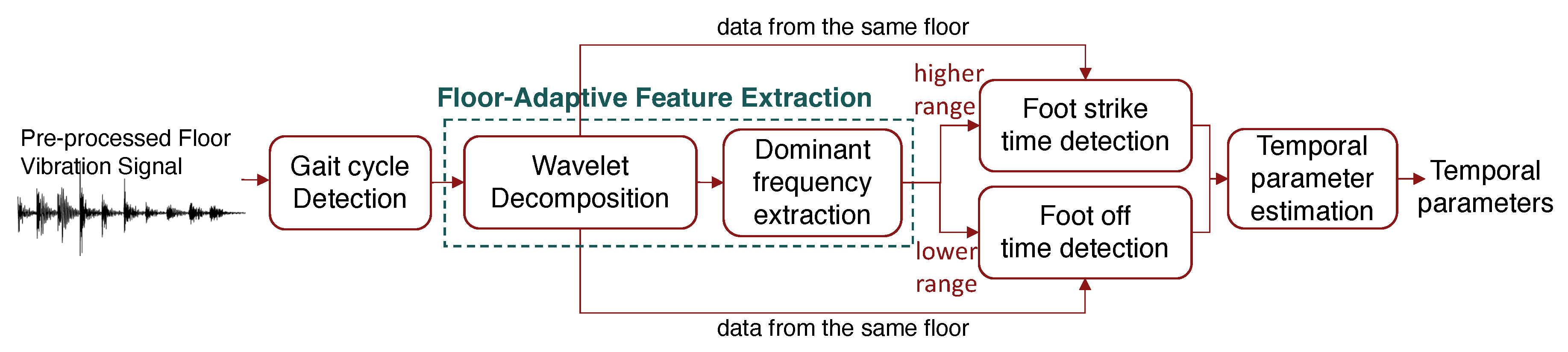
Figure 11.
An overview of the spatial gait parameters estimation process.
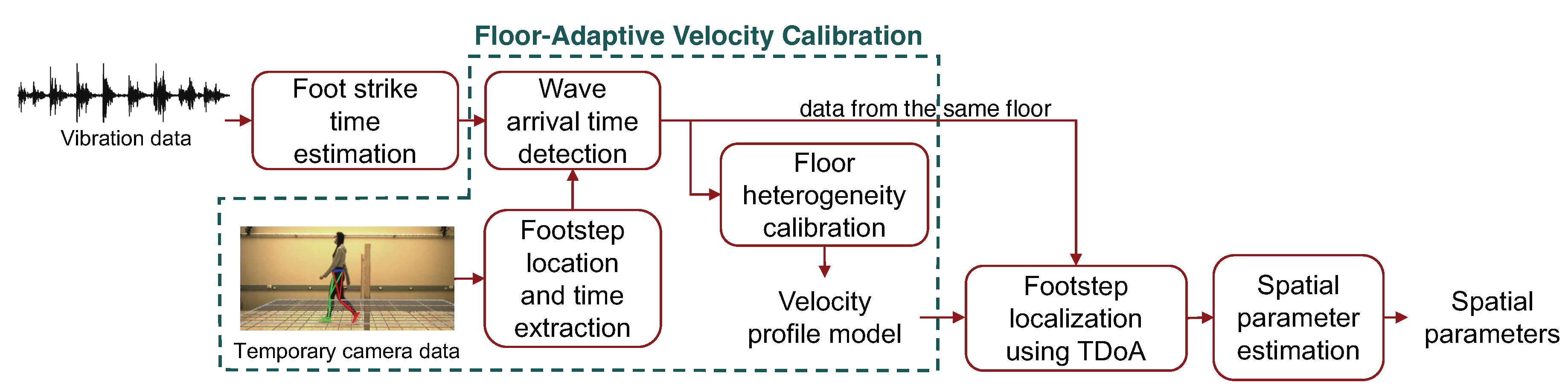
Figure 12.
A sample walking trajectory estimated from the heel strike locations.
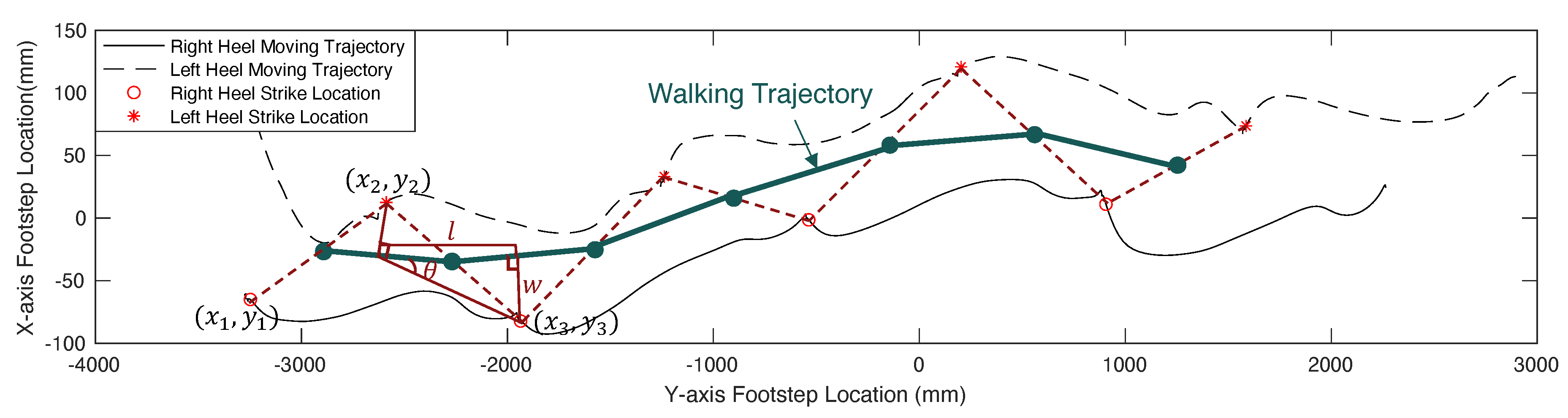
Figure 13.
Experiment setup for (a) vibration sensors mounted at the edge of the walkway [49], (b) Vicon motion capture system with lower body locomotion for ground truth collection [54], (c) wooden floor test layout, and (d) concrete floor test layout.
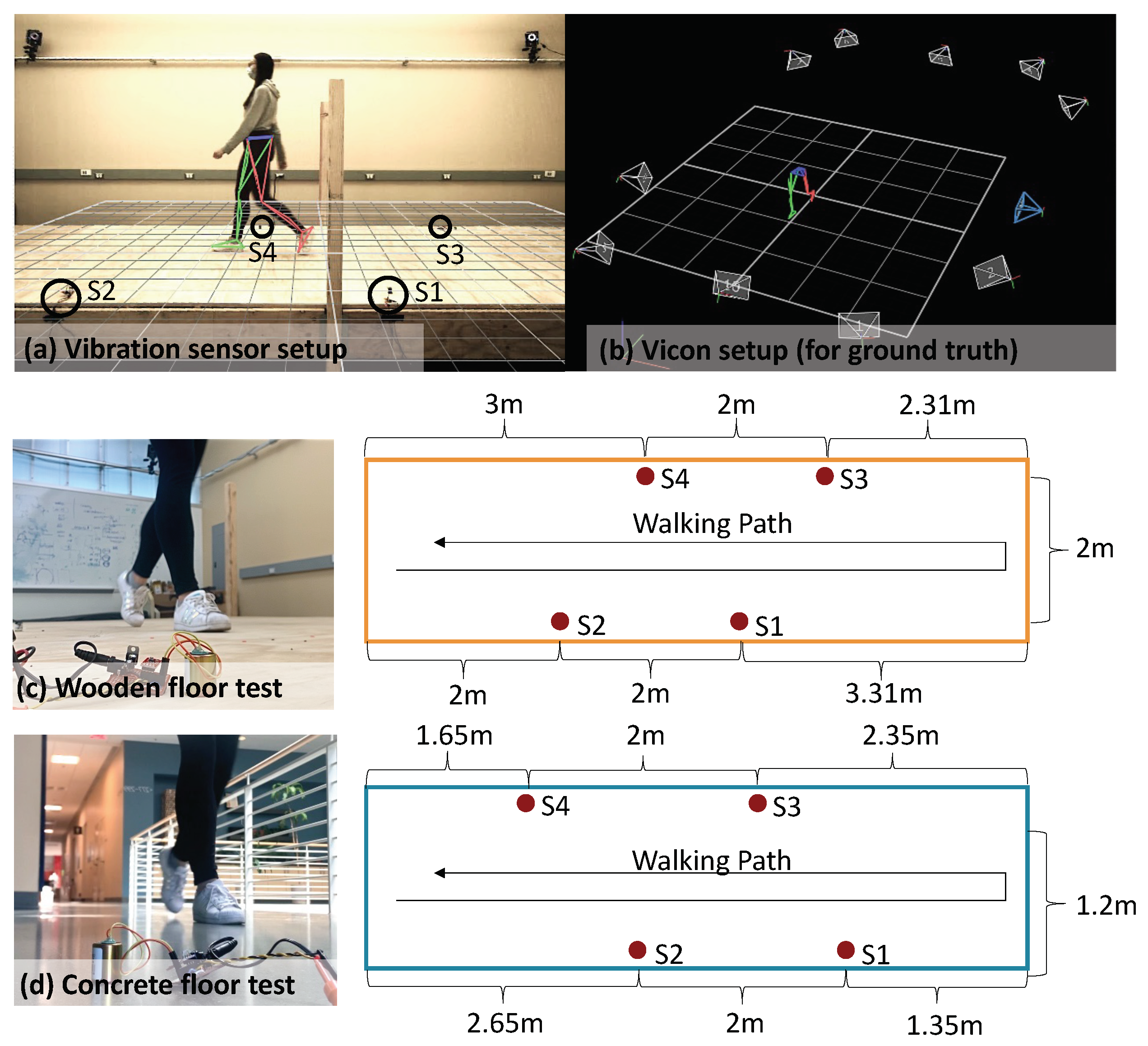
Figure 14.
Temporal gait parameter estimation error (RMSE) for 20 subjects.
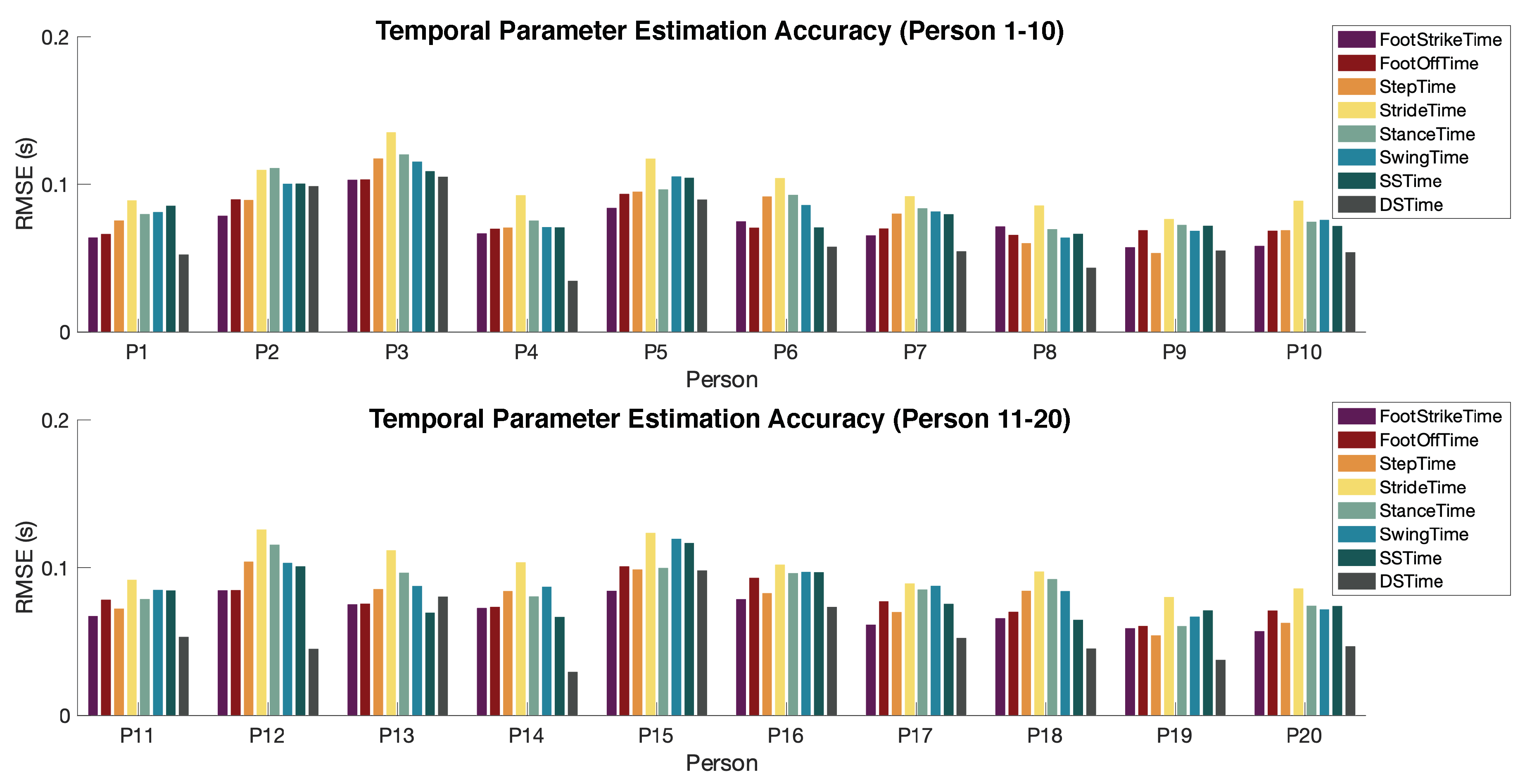
Figure 15.
Spatial gait parameter estimation error (RMSE) for 20 subjects.
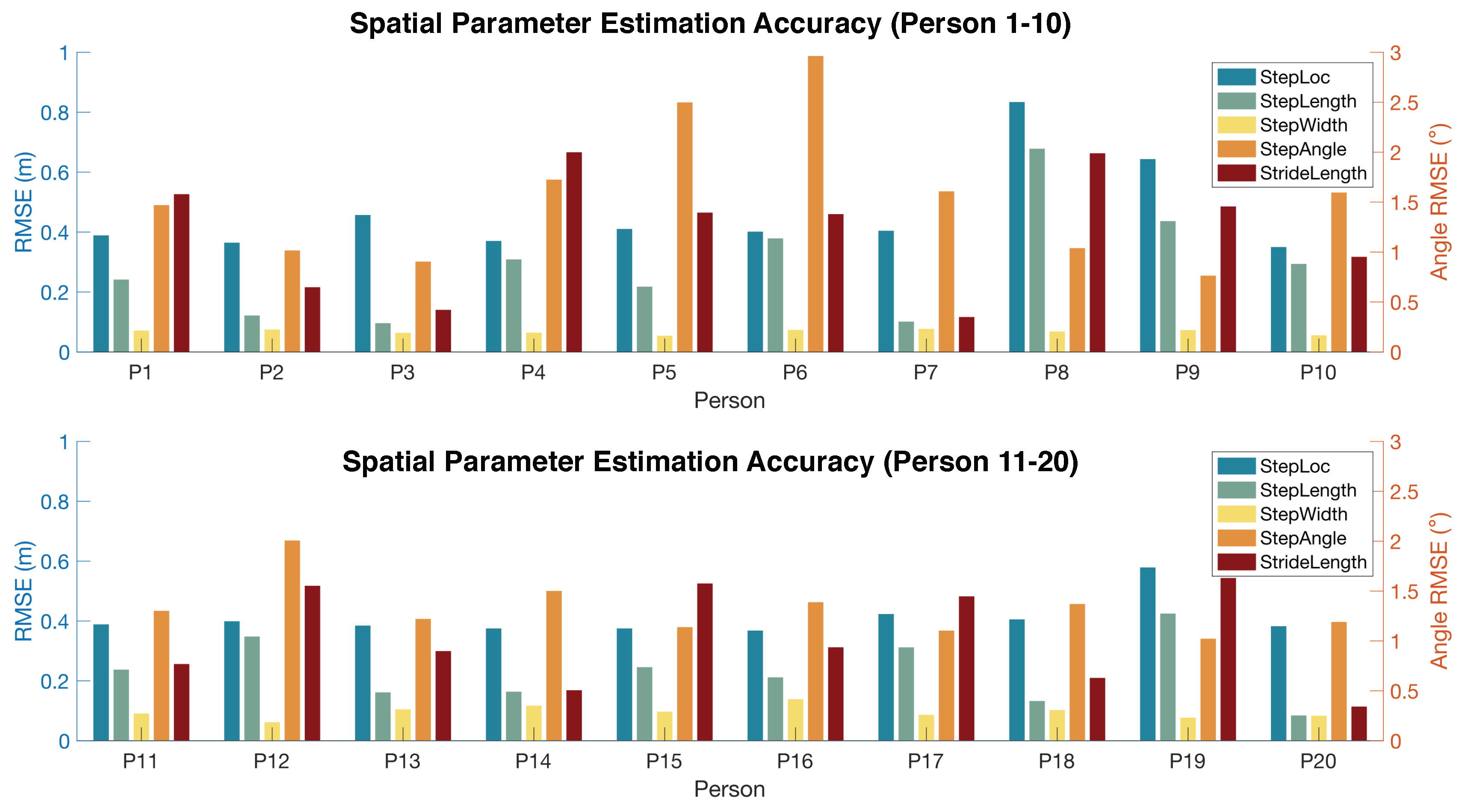
Figure 16.
Gait health indicator estimation error rate (RMSPE) for 20 subjects.
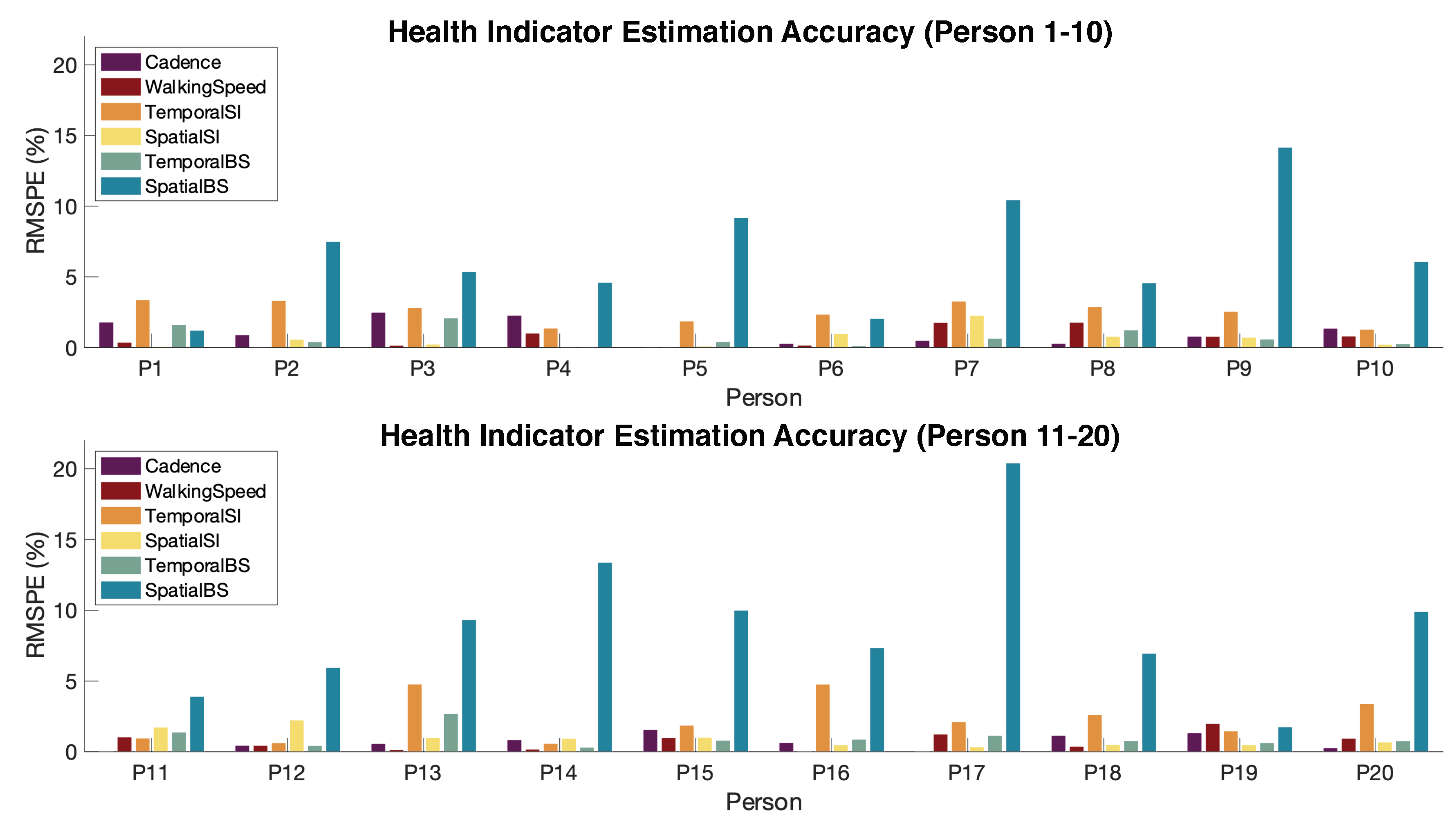
Figure 17.
4 typical gait profiles from 20 subjects. The axes in each profile represent the estimated temporal gait parameters (green), spatial gait parameters (red), and gait health indicators (blue). The gray dotted line represents the mean value among all subjects.
Figure 17.
4 typical gait profiles from 20 subjects. The axes in each profile represent the estimated temporal gait parameters (green), spatial gait parameters (red), and gait health indicators (blue). The gray dotted line represents the mean value among all subjects.
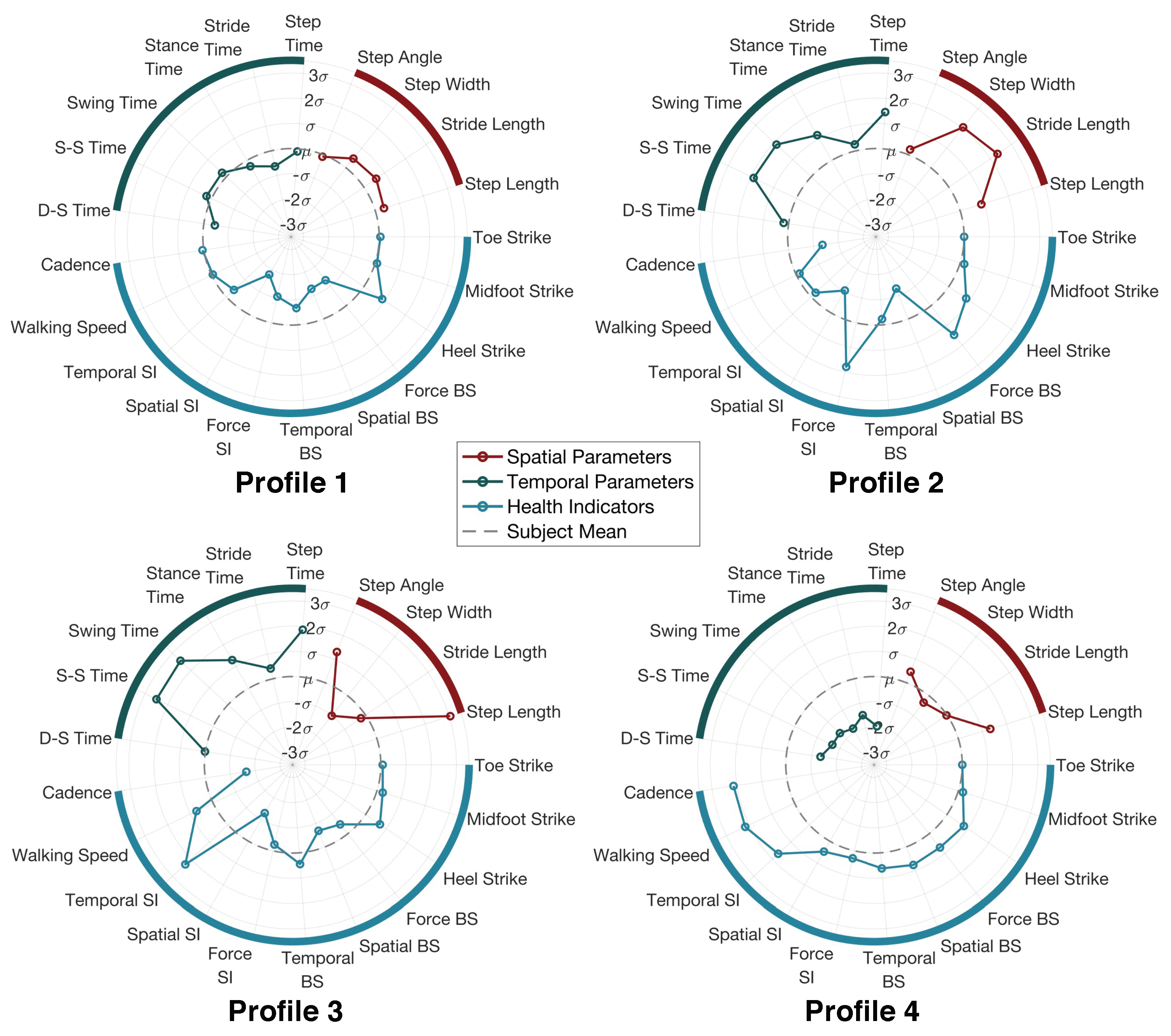
Figure 18.
Both spatial and temporal parameter estimation results are consistent across two types of floors. Our system has a significant improvement over the baseline in which there is no floor adaptation when migrating from wooden to concrete floor.
Figure 18.
Both spatial and temporal parameter estimation results are consistent across two types of floors. Our system has a significant improvement over the baseline in which there is no floor adaptation when migrating from wooden to concrete floor.
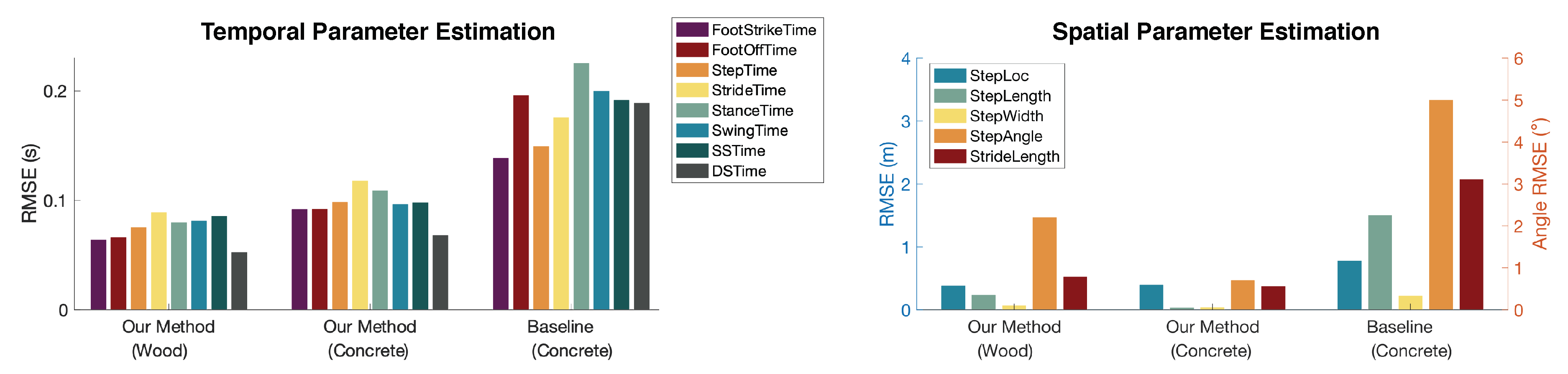

Table 1.
Summary of “subject mean” gait parameters in our study compared with existing studies.
| Gait Parameter | Mean (Ours) | Std (Ours) | Mean (Prev.1) | Std (Prev.1) |
|---|---|---|---|---|
| Walking Speed (m/s) | 1.184 | 0.140 | 1.267 | 0.209 |
| Cadence (step/min) | 104.1 | 8.566 | 114.0 | 9.300 |
| Step Time (s) | 0.581 | 0.046 | 0.541 | 0.041 |
| Stride Time (s) | 1.258 | 0.172 | 1.090 | 0.100 |
| Stance Time (s) | 0.747 | 0.066 | 0.632 | 0.045 |
| Swing Time (s) | 0.415 | 0.033 | 0.418 | 0.025 |
| Single-support Time (s) | 0.415 | 0.033 | 0.415 | 0.025 |
| Double-support Time (s) | 0.167 | 0.026 | 0.133 | 0.030 |
| Step Length (m) | 0.678 | 0.062 | 0.613 | 0.049 |
| Step Width (m) | 0.086 | 0.023 | 0.091 | 0.024 |
| Step Angle (°) | 4.123 | 1.287 | 4.290 | 1.800 |
| Stride Length (m) | 1.415 | 0.214 | 1.398 | 0.150 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



