
Submitted:
24 November 2023
Posted:
24 November 2023
You are already at the latest version
Abstract
Recently, the Third Generation Partnership Project (3GPP) introduced the New Radio (NR) technology for Vehicle-to-everything (V2X) communication to enable delay-sensitive and bandwidth-hungry applications in vehicular communication. The NR system is strategically crafted to complement the existing Long Term Evolution (LTE) Cellular-Vehicle-to-Everything (C-V2X) infrastructure, particularly to support advanced services such as the operation of automated vehicles. It is widely anticipated that the 5th generation (5G) NR system will surpass LTE C-V2X in terms of achieving superior performance in scenarios characterized by high throughput, low latency, and enhanced reliability, especially in the context of congested traffic conditions and a diverse range of vehicular applications. This article will provide a comprehensive literature review on vehicular communications from Dedicated Short Range Communication (DSRC) to NR V2X. Subsequently, it delves into a detailed examination of the challenges and opportunities inherent in NR V2X technology. Finally, we proceed to elucidate the process of creating and analyzing an open-source 5G NR V2X module in network simulation-3 (ns-3) and then demonstrate the NR V2X performance in terms of different key performance indicators implemented through diverse operational scenarios.
Keywords:
5G NR V2X
; 3GPP
; C-V2X
; Connected vehicle
; ns-3 simulation
; V2X communication
; Performance analysis
1. Introduction
Current endeavors in the realm of connected and autonomous vehicles revolve around autonomous driving and futuristic intelligent transportation systems. These objectives are underpinned by a multifaceted agenda, including the prevention of vehicular collisions, the expedited dissemination of alerts and notifications, the reduction of traffic congestion, and the optimization of road-based services to improve automotive safety and law enforcement [1]. The advent of motor vehicles has historically facilitated and continues to exert a pervasive influence on global economic and social progress. Nevertheless, motor vehicle-related accidents are a principal cause of mortality and physical harm. These accidents yield a staggering annual death toll of 1.35 million individuals worldwide [2] and impose an estimated economic burden of approximately $1.8 trillion on the global economy, spanning the years from 2015 to 2030 [3]. It is noteworthy that traffic accidents also feature prominently among the leading causes of fatalities in the United States, with substantial economic ramifications. According to the United States National Highway Traffic Safety Administration (NHTSA), motor vehicle traffic crashes account for an annual tally of around 34,000 fatalities and 4 million injuries [4], while simultaneously inflicting an economic toll exceeding $836 billion each year [5]. Furthermore, it is crucial to acknowledge that individuals fatally affected by traffic accidents represent more than statistical data or economic burdens, as their absence creates a significant societal impact. In this paper, we want to investigate the performance of connected vehicle communication using open-source simulators and latest communication standard under different network settings.
Connected and autonomous vehicle (CAV) technologies possess the capacity to substantially diminish the incidence of human fatalities and associated economic costs. A connected vehicle, at regular intervals, transmits safety messages, often referred to as “heartbeat messages,” such as the Cooperative Awareness Message (CAM) [6] or the Basic Safety Message (BSM) [5]. These messages convey real-time operational data about the vehicle, including information on its position, velocity, orientation, acceleration, deceleration, and more.
A vehicle with onboard devices relying on the Global Navigation Satellite System (GNSS), such as GPS, transmits and receives safety messages. Upon reception of these safety messages from adjacent vehicles and utilizing a cooperative vehicle safety system application [7], a vehicle can generate a neighborhood map and instructions or guidelines for safe maneuvering. According to estimates by the United States Department of Transportation (USDOT), approximately 82% of accidents involving unimpaired drivers can be mitigated through the successful implementation of connected vehicle (CV) technology [8]. Endowing vehicles with automated control features like emergency braking and preemptive warnings facilitated through connectivity significantly reduces the potential for human errors. Additionally, autonomous vehicles offer various other benefits, including the potential for improved air quality due to reduced traffic congestion and lower emissions. Furthermore, autonomous cars are poised to enhance fuel consumption efficiency and boost overall productivity, ultimately saving countless unproductive hours that drivers currently spend stuck in traffic each year [9].
The IEEE 802.11p standard, based on Dedicated Short Range Communication (DSRC) technology, has historically been the go-to choice for on-road communication. A more recent standard, 802.11bd [10], has also gained attention in this context. Many countries have invested substantially in test-bed deployment and platform development for DSRC.
However, recent research findings have brought to light some significant shortcomings of DSRC technology, including issues like low reliability, frequent collisions, hidden node problems, uncontrolled delays, and intermittent vehicle-to-infrastructure (V2I) connectivity [11]. Recognizing these limitations, and with the rapid global expansion and commercialization of Long-Term Evolution (LTE), there has been a shift in focus toward exploring LTE-5G as a potential wireless access technology for supporting vehicular applications. This transition is exemplified by the 5G Automotive Association (5GAA), which has become a Market Representation Partner (MRP) within the Third Generation Partnership Project (3GPP) framework [12]. The 5GAA brings the expertise of vehicle manufacturers and key players from the automotive industry into the 3GPP ecosystem.
According to the 3GPP Release 14 standards [13], LTE-Vehicle (LTE-V)/C-V2X has demonstrated its ability to meet the low-latency requirements of vehicular networks. Cellular networks offer inherent advantages in delivering V2I communications due to their high data rates, widespread coverage, robust quality of service (QoS) support, and deep network penetration. The 3GPP-based cellular technology, endorsed by 5GAA, is believed to provide superior performance and a more future-proof radio access solution than DSRC. It can also leverage existing upper-layer standards and testing protocols from ETSI-ITS, ISO, SAE, and IEEE, refined and endorsed by the automotive industry and the Intelligent Transportation Systems (ITS) community over the past decade.
The study report from 5GAA [14] shows a comparative performance analysis between LTE C-V2X and 802.11p and demonstrates that LTE C-V2X has better performance due to its superior physical layer than DSRC. However for the more advanced V2X applications (e.g., semi- or fully-automated driving), which have very low latency and very high bandwidth requirements, even LTE C-V2X falls short in such cases [15]. Hence, 5G New Radio (NR) comes into play to become a complementary solution to the existing LTE C-V2X technology. For that, 3GPP formulates the technical specifications for NR V2X in TR 38.885 [16]. Furthermore, 3GPP Release 16 standardizes the V2X on top of 5G NR, which is standardized in release 15 [17]. However, so far, very little work has been done on 3GPP NR V2X system and specifications [1,18,19].
Furthermore, there is a scarcity of open-source simulators designed for 5G V2X communications that align with the 3GPP NR V2X Release 16 specifications, which poses a significant limitation for the research community. Conversely, commercially available simulators are expensive and offer limited opportunities for source code modification to suit research needs. Additionally, the substantial costs associated with deploying vehicular test beds and conducting pre/post experimental validation underscore the ongoing demand for a realistic simulation platform [20,21,22]. Therefore, it would be advantageous to allocate more resources to the development and enhancement of open-source simulators tailored to NR V2X communication in compliance with 3GPP Release 16, enabling a comprehensive performance analysis in diverse network scenarios1[23].
The remainder of the chapter is organized as follows. Section 2 describes the system model. Problem statement is presented in Section 3. A brief overview of DSRC, LTE C-V2X and 5G NR V2X is presented in Section 4. Simulation setup and performance analysis are shown in Section 5. Finally, we conclude the chapter in Section 6.
2. System Architecture
Figure 1 shows the typical architecture of connected vehicular networks using the NR V2X sidelink communication. Each vehicle broadcasts the basic safety message periodically.
The message contains the instantaneous states of the vehicles which helps a vehicle to generate the neighbourhood map which eventually help the vehicle for its informed motion planning. In this work, we want to study the latency and reliability performance of V2X applications in a multi-lane highway scenario using 3GPP’s NR system without the support from a base station.
Figure 2 shows the summary of advanced V2X applications supported by 3GPP NR V2X system.
It also highlights important features that are added by 3GPP working group. These advanced applications requires high reliability (up to 99.99%), ultra low latency (as low as ), and high bandwidth (as high as an order of terabytes (TB)/hour) [24]. A brief description of important features is given below.
- Automated driving: A vehicle can sense the surrounding environment and can take the lateral and longitudinal decisions by itself or by taking a very little input from humans.
- Cooperative perception: A vehicle can increase its field of view and perception about neighbors by exchanging the onboard sensory information through V2V and V2I communication.
- Platooning: A platoon of vehicles will route from the source to the destination in close proximity following the leader vehicle. The follower vehicles should not need any input from humans.
- Infotainment: Information (e.g., road maintenance updates, weather updates, etc.) and entertainment (e.g., live traffic updates, news, music, etc.) can be disseminated from one vehicle to other vehicles through V2V and/or I2V communication in very short duration (within the order of milliseconds).
NR V2X has a number of advanced features which enable it to provide higher reliability, lower latency, and higher bandwidth [16]. These are supports for (a) flexible frame structure by providing flexible numerology, (b) multiple frequency ranges including sub 6 GHz and millimeter wave bands (24.25 - 52.6 GHz), (c) mini-slot scheduling for time-critical services, (d) sidelink network architecture for vehicles outside of the communication range of a base station, (e) resource allocation by base station (mode 1) and by the vehicles autonomously (mode 2), (d) sophisticated MAC and PHY layers.
Although NR V2X supports working in high frequency ranges, it imposes several challenges in terms of communication point of view, including high signal attenuation, communication range restriction, higher background noise, and difficulty in costly hardware implementation. Hence, it is imperative to implement and do a comprehensive study of the 3GPP NR V2X stack in a widely accepted simulator (such as ns-3 [25] under different realistic traffic scenarios.
3. Problem Statement
Early research [26] shows that C-V2X faces challenges when applied in V2V communications due to its centralized architecture, which lacks support for V2V communication. The heavy load generated by periodic messages strongly challenges LTE capacity and potentially penalizes the delivery of safety applications. On the other hand, DSRC also suffers from high latency and low reliability issues in the congested traffic situation [14].
NR V2X provides higher bandwidth, higher reliability and lower latency for many advanced V2X applications which has real-time performance requirement. This advancement is achieved through its flexible frame structure, more efficient physical and medium access control layer, support for higher modulation orders, advanced channel coding and massive Multi-input Multi-output system. However, there is not much research work has been done on NR V2X [1,16]. A more comprehensive study should be done on its implementation in the open-source software like ns-3 and then the performance should be realized and compared with the real applications in a microscopic traffic simulator. Lastly, the result should be validated with the V2X radios. In this chapter, we study the performance of NR V2X in ns-3 for different Key Performance Indicators (KPIs) recommended by 3GPP under various network settings.
4. Overview of DSRC, LTE C-V2X, and 5G NR V2X
The purpose of this section is to present a brief overview of recent technologies, DSRC, LTE C-V2X, and 5G NR V2X, deployed in connected and autonomous vehicles. Table 1 compares and contrasts the specifications of DSRC, C-V2X, and 5G NR.
4.1. DSRC
Over the past two decades, Dedicated Short Range Communications (DSRC) has been one of the primary radio access technologies (RATs) used for V2X communications. IEEE 802.11p [34], the basis of DSRC, was the first V2X technology used worldwide. It operates in the 5.9 GHz frequency band and is an extension of the IEEE 802.11 standard (commonly known as Wi-Fi) tailored for fast and reliable communication between vehicles and roadside infrastructure. Its design prioritizes safety applications, such as collision avoidance and traffic management, by delivering low-latency communication, high data rates, and robust connectivity in dynamic vehicular environments.
While DSRC 802.11p has been a pioneering standard for vehicular communication, it exhibits certain limitations compared to Cellular Vehicle-to-Everything (C-V2X) technology. DSRC operates in a single dedicated frequency band (5.9 GHz), which may lead to potential congestion and interference in densely populated areas. Additionally, DSRC lacks the inherent support for diverse communication modes that C-V2X offers, encompassing both direct short-range communication (similar to DSRC) and wide-area communication facilitated by cellular networks. C-V2X also boasts improved non-line-of-sight (NLOS) performance, enabling communication around obstacles.
To narrow the performance gap, IEEE 802.11bd [35,36,37,36] has been developed as the next-generation DSRC protocol to improve V2X performance. It allows up to three repetitions per packet, aiming to increase time diversity and enable maximum ratio combining at the receiver, thus improving the probability of correct decoding [37]. Additionally, it adds extra modes of operation to enhance throughput and extend communication ranges by reducing noise sensitivity level [28,38].
4.2. LTE C-V2X
C-V2X, or Cellular Vehicle-to-Everything, commonly referred to as LTE-V2X due to its foundation on Time Division Long-Term Evolution (TD-LTE) 4G cellular technology, is a prominent communication framework designed to enhance vehicular connectivity and road safety. It was developed by 3GPP as an alternative to DSRC.
C-V2X enables direct and reliable wireless communication among vehicles (V2V), between vehicles and infrastructure (V2I), and even with pedestrians and other vulnerable road users (V2P), thus forming a comprehensive V2X ecosystem. This technology leverages the existing cellular network infrastructure to provide low-latency, high-throughput data exchange, enabling vehicles to exchange critical information such as traffic conditions, emergency alerts, and real-time sensor data. C-V2X holds significant promise in advancing intelligent transportation systems, reducing traffic accidents, and enabling future autonomous driving applications, making it a focal point of research and development in the field of connected vehicles and smart transportation.
C-V2X is regarded as the most powerful competitor to 802.11p [39], and consequently, many studies have investigated their comparative performances. Comparison at the link level showed that C-V2X could improve the link budget over IEEE 802.11p by around 7 dB [39]. In addition, the study also found the coverage of LTE V2X to be larger than DSRC under the same velocity. Furthermore, owing to the modulation technique used by LTE V2X, it is less susceptible to noise, which allows it to guarantee a more reliable communication link than DSRC. A more detailed performance comparison between the two technologies are covered in the next section as below.
4.3. DSRC vs. C-V2X
There has been a heated debate regarding the performance of DSRC and C-V2X technologies, leading to extensive studies comparing their performance [40,41,42,43,44,45]. The commonly used key performance indicators (KPI) include: Packet Delivery Ratio (PDR) [44,46], Packet Reception Ratio (PRR) [41,42,43], Block Error Ratio (BLER) [39], Packet Inter-Reception time (PIR), and packet loss [44].
In the literature, certain studies [44,46,47,48] have reported that DSRC outperforms C-V2X, while others have observed similar performance [49] in the specific scenarios they examined. Molina-Masegosa et al. [44] demonstrated that variations in message size and pattern significantly affect the Medium Access Control (MAC) operation and performance of both technologies and that DSRC handles variations in the message size and time interval more effectively than LTE-V2X’s sensing-based semi-persistent scheduling, except under very low channel loads. Petrow et al. [46] showcased that only the DSRC technology is able to support the V2I communication scenarios without any major limitations and achieves an average end-to-end delay of less than 100 milliseconds and a PDR above in all of their investigated simulation scenarios.
However, the majority of research suggests that C-V2X performs better [42,50]. Hafeez et al. [40] proposed an analytical model for assessing the reliability of DSRC control channels in safety applications. The model considers factors such as vehicle follow-on safety rules, mobility, transmitter-receiver speeds, channel fading, hidden terminals, and collisions. Simulation results using realistic vehicular traces validate the modeling and analysis, showcasing that DSRC may lead to significant performance degradation in terms of delay and packet reception probability in dense and high-mobility conditions. Hu et al. [39] conducted link-level simulations comparing LTE V2X and DSRC for urban and freeway scenarios with and without Line of Sight (LOS). Their study demonstrated that LTE V2X achieves the same Block Error Ratio (BLER) at a lower Signal-to-Noise Ratio (SNR) or with reduced receiving power compared to DSRC, resulting in a more reliable link. Wang et al. [41] conducted simulations to compare the average PRR between LTE and DSRC at different vehicle densities in both urban and freeway scenarios with varying distances. Their study illustrates that LTE-based alternatives, including LTE multicast and LTE sidelink, outperform IEEE 802.11p in all the studied cases. This improved performance is credited to LTE’s more robust PHY layer signaling scheme and more efficient resource allocation mechanism. Nguyen et al. [42] compared DSRC and Cellular V2X, with Cellular V2X consistently outperforming or matching DSRC in various aspects. Notably, Cellular V2X offers an extended communication range, crucial for vehicular safety. The evaluation favors DSRC despite using an advanced DSRC receiver and a standard Cellular V2X receiver with conservative AGC loop training assumptions. Zhao et al. [43] compared LTE-V2X and DSRC in terms of average PRR at different distances in freeway and urban scenarios. Their findings indicate that LTE-V2X offers longer, more reliable communication ranges compared to DSRC. This advantage is attributed to LTE-V2X’s efficient sensing and SPS resource allocation scheme, confirming its superiority over DSRC.
It is worth noting that recent research also investigates solutions to leverage the advantages of DSRC and C-V2X [28,51,52,53,54] and mitigate limitations for joint use of DSRC and C-V2X. Ansari et al. [28] reviewed the background and technical aspects of both technologies and elaborated on V2X platform models allowing concurrent and simultaneous propagation of DSRC and C-V2X messages for a hybrid V2X environment. The study highlights the challenges arising from the nature of hybrid V2X and argues that the operation of the two technologies in the same channel for concurrent transmissions, without a mutual synchronization solution, would result in harmful co-channel interference. Both co-channel and adjacent-channel interferences remain open research problems in hybrid V2X systems. Mir et al. [52] proposed an architecture and a suite of protocols to enable DSRC and C-V2X hybrid vehicular networks. The protocol suite comprises an enhanced network protocol stack, an adaptive RAT selection mechanism, a Vertical Handover (VHO) algorithm, and dynamic communication management (DCM) algorithms to address various challenges in the hybrid network. Simulation results using Matlab demonstrate the effectiveness of this architecture and protocol suite in terms of packet delivery ratio, latency, and throughput. Qi et al. [51] introduced the Traffic Differentiated Clustering Routing (TDCR) mechanism within a Software Defined Network (SDN)-enabled hybrid vehicular network. This mechanism comprises a centralized one-hop clustering approach and an optimization method for data delivery. Specifically, the optimization aims to strike a balance between cellular bandwidth cost and end-to-end delay, allowing Cluster Heads (CHs) to deliver their aggregated data either through multi-hop Vehicle-to-Vehicle (V2V) transmissions or via cellular networks.
4.4. Challenges faced by DSRC and C-V2X
Scalability is a major challenge for DSRC as its performance degrades at higher vehicle densities due to packet collisions. However, due to frequency re-using by the C-V2X sidelink mode 4 algorithm over a given geographical area, higher traffic density also results in an increased interference level among C-V2X users. Hence, although C-V2X offers several performance benefits over DSRC, it suffers from the same traffic density issue [55].
Another challenge for both DSRC and C-V2X is supporting advanced safety applications requiring faster response times. Both technologies can support a basic set of vehicular safety applications that generate driver alerts to indicate potentially dangerous conditions [40]. These day-1 basic safety applications have lower periodicity and higher end-to-end latency requirements. However, advanced vehicular safety applications depend on transmitting messages for maneuver changes, trajectory alignments, platoon formations, sensor data exchange, as well as sharing information gathered from neighboring vehicles’ live camera feeds [56]. This additional information is paramount to ensuring both safer autonomous cars and human-driven vehicles, better traffic management, and the increasing demand for in-vehicle infotainment.
4.5. 5G NR V2X
The development of the 3GPP sidelink transmission protocol played a crucial role in the long-term evolution-advanced (LTE-A) communication technology for public safety and V2X services [57]. However, recent advancements in data-driven applications require more sidelink functions, such as feedback channels, grant-free access, and enhanced channel sensing procedures, which are not provided by the LTE-A technology. Advanced applications that deal with an overwhelming degree of data packets usually demand higher bandwidth, more frequent message passing, and lower latency, which C-V2X cannot provide [33]. Moreover, these advanced applications also use larger and variable-sized packets transmitted aperiodically, unlike the basic safety applications. As a result, a new communication technology, 5G New Radio (NR) V2X, has been developed to supplement C-V2X in supporting those particular use cases. More specifically, 5G NR V2X provides advanced functionalities in addition to 5G NR air interface that meet stringent requirements of users and/or services in connected and autonomous vehicles.
Among the most significant parts of the 5G NR V2X communication technology is the sidelink transmission. A thorough analysis of 5G NR V2X communications is presented in [58] and some references therein. It is important to note, however, that the 5G NR V2X communication technology is not meant to replace C-V2X communication; rather, it can operate in cooperation with the existing C-V2X technology to meet the requirements of complex services in recent data-driven connected and autonomous vehicles. It is also worth noting that an individual application may be operated and supported with either its corresponding communication technology or a combination of different communication technologies. For instance, advanced V2X services provided by the NR sidelink transmission may coexist with those provided by the LTE sidelink transmission in different channels [59].
Sidelink communication is the key enabler of direct V2X communication without the support of a base station in 5G NR. According to [60], the NR V2X supports four different physical channels for enabling unicast, groupcast, and broadcast communications among the vehicles: (1) the PSBCH (Physical Sidelink Broadcast Channel) is used to disseminate broadcast information; (2) the PSCCH (Physical Sidelink Control Channel) is communicating control information; (3) the PSSCH (Physical Sidelink Shared Channel) is used for exchanging control, data and CSI (Channel State Information) for unicast communication; and (4) the PSFCH (Physical Sidelink Feedback Channel) is used for exchanging HARQ (Hybrid Automatic Repeat Request) feedback for unicast and groupcast communication. For enabling these channels at sub 6 GHz frequency band, three numerologies () are used with different Sub-carrier Spacing (SCS): (1) with SCS = 15 KHz; (2) with SCS = 30 KHz; and (3) with SCS = 60 KHz. One numerology differs from another by varying (1) the number of available subchannels/resource blocks in communication, and (2) the resource selection window length. For instance, a higher numerology has a lower number of sub-channel availability, but it also has a shorter slot length which results in a lower resource selection window in ms.
5. Performance Evaluation
5.1. Simulation model
A set of computer experiments has been conducted based on 3GPP’s NR V2X specifications under various network settings. An autonomous and connected vehicle scenario (i.e., a potential use case) has been created using the ns-3 [25] discrete event network simulator. Note that ns-3 is a free, and open-source software, licensed under the GNU GPLv2 license. It provides a simulation engine for users to conduct simulation experiments, (i) to perform studies that are more difficult or not possible to perform with real systems, (ii) to study system behavior in a highly controlled, reproducible environment, and to learn about how networks work [61].
The simulated highway scenario is shown in Figure 3. The simulation network consists of a highway of three lanes where in each lane at any point of time one vehicle plays the role of transmitter and others act as receivers. At the default settings, inter-lane distance is 4 meters and in each lane 11 vehicles are set with a 20 meters apart. The generated vehicles follow a constant velocity mobility model with a default speed of 38.89 m/s. A transmitting vehicle generates packets in every 100 msec interval and the whole simulation is conducted for 20 seconds. The explicit parameter settings for the conducted simulation are shown in Table 2. Other than these explicitly listed parameters, simulation was conducted under the simulator’s default settings.
5.2. Performance metrics
- Packet Reception Ratio (PRR): It is the ratio of the number of neighboring vehicles that received the transmitted packet to the total number of neighboring vehicles of the transmitting vehicle. In a better communication environment, a higher PRR is expected.
- Packet Inter-reception time (PIR): It is the elapsed time between two consecutive receptions of packets for a transmitting (Tx) and receiving (Rx) vehicles pair. We computed the average PIR for a Tx-Rx pair. A lower PIR indicates lower latency and thus a better communication environment.
- Throughput: It is defined as the number of bytes received per unit time for a Tx-Rx pair. A higher throughput indicates better communication and is desirable.
5.3. Performance analysis
In this section, we discuss the impact of varying different network parameters on the NR V2X performance. Note that the simulation has been conducted until 95% confidence interval was achieved. With no loss of generality and to better illustrate the performance of the 5G NR V2X communication technology, let us model the performance metrics, PRR, PIR, and throughput using Gaussian random variables, X, Y, and Z, respectively. Their corresponding probability density functions are defined by,
where The mean and standard deviations used to conducting real-time simulations of PIR, PRR, and throughput are given in Table 3.
Since these metrics are evaluated on discrete set of values, therefore, we determined their corresponding cumulative distributions functions, and defined as
where the operator determines the probability measure taking values from the open interval . In the following, we provide the impact of different network parameters on these output performance metrics, namely, PIR, PRR, and throughput of the networked 5G new radio in the framework of V2X communication.
5.3.1. Impact of numerology ()
Figure 4 shows the impact of different numerologies in terms of CDF statistics of average PIR, PRR and throughput under default simulation settings (Table 2). Recalling that NR V2X supports three different numerologies: (1) (SCS = 15 KHz); (2) (SCS = 30 KHz); and (3) (SCS = 60 KHz). Increasing numerology has a counter productive effect in terms of availability of sub-channels and selection window length. Increasing numerology ( is higher) reduces the number of available sub-channels (analogus to reducing resource blocks) but also reduces the selection window size. Having a higher number of sub-channels yields in lesser contention among the transmitting vehicles. On the other hand, smaller selection window size reduces the probability of overlapping window selection among the transmission vehicles. As a result from Figure 4, we see that there is almost identical performance between and . However, for , selection window length reduces to 8 ms (in compare to 32 ms for =0) which supersedes the negative impact of having a lower number of sub-channel availability. Hence, has a better performance in terms of achieving lower PIR, and higher PRR and throughput.
5.3.2. Impact of communication rage
Figure 5 shows the impact of communication range in terms of varying transmitting ranges of a transmitting vehicle. Interestingly, we found that the NR V2X performance does not degrade till communication range. shows a slight better performance than in terms of achieving lower PIR, higher PRR and higher throughput. However, consistent to the previous set of result, shows a distinguished better performance than and .
5.3.3. Impact of transmit power
The impact of transmit power by varying the transmit (Tx) power of a transmitting vehicle is shown in Figure 6. With the increasing transmit power, inter packet reception time of a Tx-Rx pair vehicle decreases, hence overall PIR decreases. On the other hand, with the increasing Tx power, signal strength increases, hence more packets are received correctly by a receiving vehicle. As a results, with the increasing Tx power, PRR increases and so the throughput. Like the previous set of results, among the different numerologies, has the best performance, ranks second and is the last.
5.3.4. Impact of packet size
Figure 7 shows the impact of packet size on different numerologies in terms of PIR, PRR and throughput. Since increasing packet size increases packet processing time and packet transmission time, overall PIR increases for the receiving vehicles. However, thanks to 5G NR V2X radio, with the increasing packet size, the vehicular network is still able to hold the PRR high, which results in higher throughput. Note that a bigger received packet (more bits) contributes more in achieving higher throughput than a smaller packet. Numerology-wise, there is no distinguished difference in PIR result, but in PRR and throughput results, clearly outperforms and .
5.3.5. Impact of modulation and coding scheme (MCS)
Usually, a higher modulation and coding scheme (MCS) is a better choice for a short distance communication whereas for a long distance communication, a lower MCS value is preferable for achieving a better network performance. A higher MCS is not good for a larger distance because, it results in more inaccurate received packets at physical layer and hence increases the number of packet losses. On the other hand, although a lower MCS is more robust for receiving correct packet at physical layer even for long distance communication, a lower MCS also fit a reduced amount of data in a sub-channel. This is due to the reduced modulation and effective code rate per channel. Hence, in this simulation campaign, we want to see which MCS value is a better fit for our simulation settings.
Figure 8 shows the impact of varying modulation and coding scheme under simulation default settings (specifically with communication and ). The results show that increasing MCS results in slowly increasing better performance until it reaches to , after that it starts declining and plummets at , after that it start again improving better performance. Hence, we recommend to use MCS value of 15 for the set communication range for achieving the overall better performance.
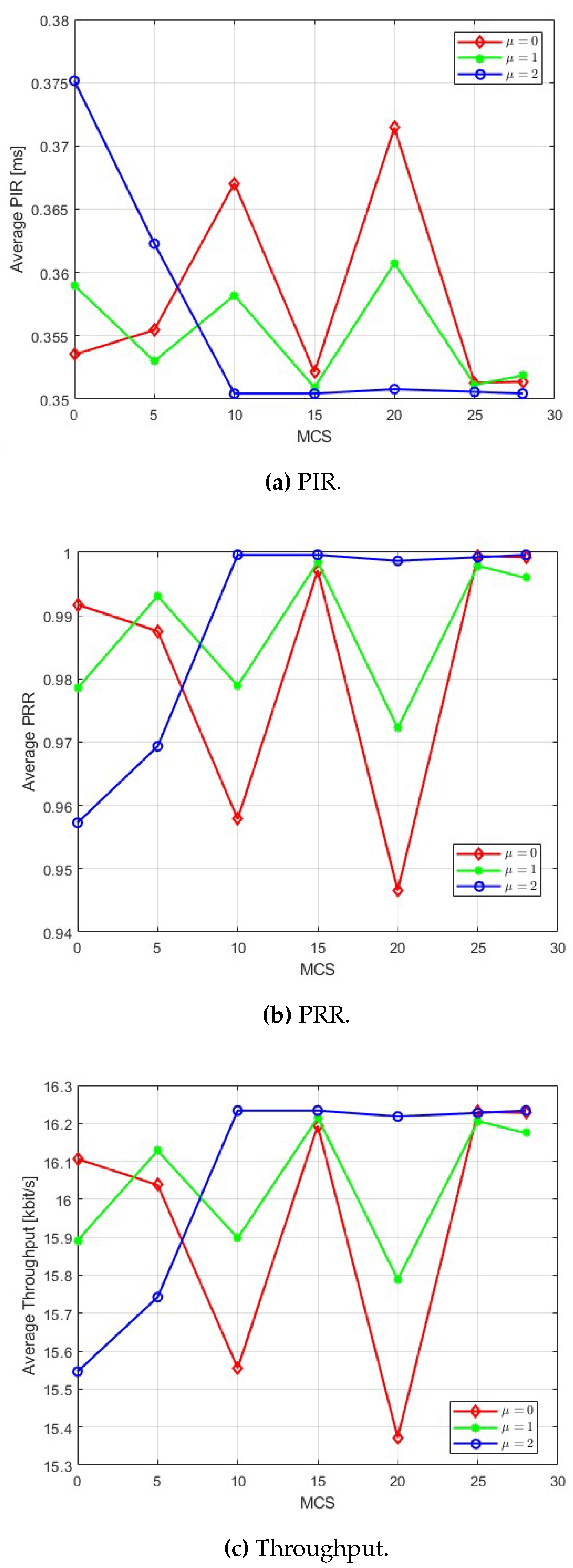
A further study has been done to find the impact of MCS on different values as shown in Figure 9. This set of results confirm that can achieve an improved performance than and with a lower MCS value. In other words, the result shows that while for and , we need to increase MCS value upto 15, in contrast, for , we get the same better result just for (and do not need to increase MCS value till 15).
6. Conclusion and future work
In this work, firstly we have developed the 3GPP’s 5G NR V2X network simulation model using the ns-3 discrete event simulator and then studied the V2X performance under various network settings. We found that in 5G NR V2X, a higher sub-carrier spacing () has an overall better performance than a lower sub-carrier spacing ( or ) in terms of achieving a higher throughput and packet reception ratio and achieving a lower inter-packet reception delay. From the analysis, we also observed that in the highway setting, till communication range, there were no noticeable packet drops in NR V2X communication. Additionally, we found that increasing transmitting power is positively associated with improving performance. However, although increasing packet size boosts throughput but is negatively associated with achieving lower inter-packet reception delay. We have also found that increasing modulation and coding scheme (MCS) value, increases the network performance for different sub-carrier spacing. However, with a setting of communication range, for , we get the best result at the MCS value of 10, whereas for and we need to increase the MCS value up-to 15 to get the same better performance.
In our future research work, we want to extend our simulation by introducing communication from infrastructure to vehicle (I2V) and vehicle to pedestrian (V2P). Another interesting future research direction might be leveraging the developed NR V2X communication model to achieve enhanced and extended cooperative perception for improved vehicle motion planning.
Author Contributions
This work was completed with contributions from all the authors. “conceptualization, G.G.M.N.A., M.N.S., M.S.M. and S.A.S.; methodology, G.G.M.N.A., M.S.M., and S.A.S.; software, G.G.M.N.A., M.N.S., and S.A.S.; validation, G.G.M.N.A., M.N.S., M.S.M. and S.A.S.; formal analysis, G.G.M.N.A., and M.S.M.; data curation, G.G.M.N.A., M.N.S., and S.A.S.; writing—original draft preparation, G.G.M.N.A., M.N.S., M.S.M., S.A.S., and Y.W.; writing—review and editing, G.G.M.N.A., M.N.S., M.S.M., S.A.S., and Y.W.; visualization, G.G.M.N.A., M.S.M., S.A.S.; funding acquisition, G.G.M.N.A. and Y. W. All authors did edit, review and improve the manuscript. All authors have read and agreed to the published version of the manuscript. ”
Funding
“This research was funded by the Faculty Scholarship Award (FSA) for the academic year of 2022-23 from the Bradley University under grant no. 1326841.
Institutional Review Board Statement
“Not applicable”
Data Availability Statement
“Data will be available upon request”
Conflicts of Interest
“The authors declare no conflict of interest.”
Abbreviations
The following abbreviations are used in this manuscript:
| 3GPP | 3rd Generation Partnership Project |
| C-V2X | Cellular Vehicle-to-everything, also known as (LTE-V2X) |
| LTE-V2X | Long Term Evolution Vehicle-to-everything |
| DSRC | Dedicated Short Range Communication |
| 5G NR | 5th Generation New Radio |
| 5GAA | 5th Generation Automotive Association |
References
- Ali, Z.; Lagén, S.; Giupponi, L.; Rouil, R. 3GPP NR V2X Mode 2: Overview, Models and System-Level Evaluation. IEEE Access 2021, 9, 89554–89579. [Google Scholar] [CrossRef]
- World Health Organization (WHO). Global Status Report on Road Safety 2018. https://www.who.int/publications/i/item/9789241565684. Accessed: 2022-03-04.
- Chen, S.; Kuhn, M.; Prettner, K.; Bloom, D.E. The global macroeconomic burden of road injuries: estimates and projections for 166 countries. The Lancet Planetary Health 2019, 3, e390–e398. [Google Scholar] [CrossRef]
- FARS Encyclopedia. http://www-fars.nhtsa.dot.gov/Main/index.aspx. Accessed: 2019-02-22.
- Ali, G.G.M.N.; Ayalew, B.; Vahidi, A.; Noor-A-Rahim, M. Feedbackless Relaying for Enhancing Reliability of Connected Vehicles. IEEE Transactions on Vehicular Technology 2020, 69, 4621–4634. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Ali, G.G.M.N.; Nguyen, H.; Guan, Y.L. Performance Analysis of IEEE 802.11p Safety Message Broadcast With and Without Relaying at Road Intersection. IEEE Access 2018, 6, 23786–23799. [Google Scholar] [CrossRef]
- Zhang, F.; Du, Y.; Liu, W.; Li, P. Model Predictive Power Control for Cooperative Vehicle Safety Systems. IEEE Access 2018, 6, 4797–4810. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Ali, G.G.M.N.; Guan, Y.L.; Ayalew, B.; Chong, P.H.J.; Pesch, D. Broadcast Performance Analysis and Improvements of the LTE-V2V Autonomous Mode at Road Intersection. IEEE Transactions on Vehicular Technology 2019, 68, 9359–9369. [Google Scholar] [CrossRef]
- Ali, G.G.M.N.; Noor-A-Rahim, M.; Rahman, M.A.; Samantha, S.K.; Chong, P.H.J.; Guan, Y.L. Efficient Real-Time Coding-Assisted Heterogeneous Data Access in Vehicular Networks. IEEE Internet of Things Journal 2018, 5, 3499–3512. [Google Scholar] [CrossRef]
- Naik, G.; Choudhury, B.; Park, J.M. IEEE 802.11bd & 5G NR V2X: Evolution of Radio Access Technologies for V2X Communications. IEEE Access 2019, 7, 70169–70184. [Google Scholar] [CrossRef]
- Wang, M.; Winbjork, M.; Zhang, Z.; Blasco, R.; Do, H.; Sorrentino, S.; Belleschi, M.; Zang, Y. Comparison of LTE and DSRC-Based Connectivity for Intelligent Transportation Systems. 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), 2017, pp. 1–5. [CrossRef]
- 5GAA joins 3GPP. https://www.3gpp.org/. Accessed: 2023-03-08.
- 3GPP Release 14. https://www.3gpp.org/release-14. Accessed: 2023-03-08.
- An Assessment of LTE-V2X (PC5) and 802.11p Direct Communications Technologies for Improved Road Safety in the EU. Studies, 5GAA, Munich, Germany, 2017.
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for Sidelink 5G V2X Vehicular Communications: A New 5G Technology for Short-Range Vehicle-to-Everything Communications. IEEE Vehicular Technology Magazine 2017, 12, 30–39. [Google Scholar] [CrossRef]
- Study on NR Vehicular to Everything (V2X) (Release 16). Technical Report 38.885, 3GPP, 2019.
- Harounabadi, M.; Soleymani, D.M.; Bhadauria, S.; Leyh, M.; Roth-Mandutz, E. V2X in 3GPP Standardization: NR Sidelink in Release-16 and Beyond. IEEE Communications Standards Magazine 2021, 5, 12–21. [Google Scholar] [CrossRef]
- Ganesan, K.; Lohr, J.; Mallick, P.B.; Kunz, A.; Kuchibhotla, R. NR Sidelink Design Overview for Advanced V2X Service. IEEE Internet of Things Magazine 2020, 3, 26–30. [Google Scholar] [CrossRef]
- Lien, S.Y.; Deng, D.J.; Lin, C.C.; Tsai, H.L.; Chen, T.; Guo, C.; Cheng, S.M. 3GPP NR Sidelink Transmissions Toward 5G V2X. IEEE Access 2020, 8, 35368–35382. [Google Scholar] [CrossRef]
- Carpenter, S.E.; Sichitiu, M.L. An Obstacle Model Implementation for Evaluating Radio Shadowing with ns-3. Proceedings of the 2015 Workshop on Ns-3; ACM: New York, NY, USA, 2015; WNS3 ’15, pp. 17–24. [Google Scholar] [CrossRef]
- Ali, G.G.M.N.; Noor-A-Rahim, M.; Chong, P.H.J.; Guan, Y.L. Analysis and Improvement of Reliability Through Coding for Safety Message Broadcasting in Urban Vehicular Networks. IEEE Transactions on Vehicular Technology 2018, 67, 6774–6787. [Google Scholar] [CrossRef]
- Simulation of Urban MObility (SUMO). http://sumo.dlr.de/.
- Md. Nawaz Ali, G.G.; Sharief, S.A.; Sadat, M.N.; Miah, M.S. Performance Analysis of 5G New Radio V2X Communication. 2023 IEEE Wireless and Microwave Technology Conference (WAMICON), 2023, pp. 1–4. [CrossRef]
- Drago, M.; Zugno, T.; Polese, M.; Giordani, M.; Zorzi, M. MilliCar: An Ns-3 Module for MmWave NR V2X Networks. Proceedings of the 2020 Workshop on Ns-3; Association for Computing Machinery: New York, NY, USA, 2020; WNS3 ’20, p. 9–16. [Google Scholar] [CrossRef]
- ns-3: A Discrete-Event Network Simulator. https://www.nsnam.org/. Accessed: 2019-02-22.
- Abboud, K.; Omar, H.A.; Zhuang, W. Interworking of DSRC and Cellular Network Technologies for V2X Communications: A Survey. IEEE Transactions on Vehicular Technology 2016, 65, 9457–9470. [Google Scholar] [CrossRef]
- Choi, J.; Marojevic, V.; Dietrich, C.B.; Reed, J.H.; Ahn, S. Survey of Spectrum Regulation for Intelligent Transportation Systems. IEEE Access 2020, 8, 140145–140160. [Google Scholar] [CrossRef]
- Ansari, K. Joint use of DSRC and C-V2X for V2X communications in the 5.9 GHz ITS band. IET Intelligent Transport Systems 2021, 15, 213–224. [Google Scholar] [CrossRef]
- Bai, F.; Stancil, D.D.; Krishnan, H. Toward understanding characteristics of dedicated short-range communications (DSRC) from a perspective of vehicular network engineers. Proceedings of the sixteenth annual International Conference on Mobile Computing and Networking, 2010, pp. 329–340.
- Wang, J.; Wu, T.; Liu, Y.; Deng, W.; Oh, H. Modeling and performance analysis of dynamic spectrum sharing between DSRC and Wi-Fi systems. Wireless Communications and Mobile Computing 2016, 16, 2743–2758. [Google Scholar] [CrossRef]
- Barneto, C.B.; Riihonen, T.; Turunen, M.; Anttila, L.; Fleischer, M.; Stadius, K.; Ryynänen, J.; Valkama, M. Full-duplex OFDM radar with LTE and 5G NR waveforms: Challenges, solutions, and measurements. IEEE Transactions on Microwave Theory and Techniques 2019, 67, 4042–4054. [Google Scholar] [CrossRef]
- Ali, Z.; Lagén, S.; Giupponi, L.; Rouil, R. 3GPP NR V2X mode 2: Overview, models and system-level evaluation. IEEE Access 2021, 9, 89554–89579. [Google Scholar] [CrossRef]
- Naik, G.; Choudhury, B.; Park, J.M. IEEE 802.11 bd & 5G NR V2X: Evolution of radio access technologies for V2X communications. IEEE access 2019, 7, 70169–70184. [Google Scholar]
- Jiang, D.; Delgrossi, L. IEEE 802.11 p: Towards an international standard for wireless access in vehicular environments. VTC Spring 2008-IEEE vehicular technology conference. IEEE, 2008, pp. 2036–2040.
- Torgunakov, V.; Loginov, V.; Khorov, E. A study of channel bonding in IEEE 802.11 bd networks. IEEE Access 2022, 10, 25514–25533. [Google Scholar] [CrossRef]
- Abd, R.I.; Kim, K.S. Protocol solutions for IEEE 802.11 bd by enhancing IEEE 802.11 ad to address common technical challenges associated with mmWave-based V2X. IEEE Access 2022, 10, 100646–100664. [Google Scholar] [CrossRef]
- Zhuofei, W.; Bartoletti, S.; Martinez, V.; Bazzi, A. Adaptive Repetition Strategies in IEEE 802.11 bd V2X Networks. IEEE Transactions on Vehicular Technology 2023. [Google Scholar] [CrossRef]
- Zeadally, S.; Javed, M.A.; Hamida, E.B. Vehicular communications for ITS: Standardization and challenges. IEEE Communications Standards Magazine 2020, 4, 11–17. [Google Scholar] [CrossRef]
- Hu, J.; Chen, S.; Zhao, L.; Li, Y.; Fang, J.; Li, B.; Shi, Y. Link level performance comparison between LTE V2X and DSRC. Journal of Communications and Information Networks 2017, 2, 101–112. [Google Scholar] [CrossRef]
- Hafeez, K.A.; Zhao, L.; Ma, B.; Mark, J.W. Performance analysis and enhancement of the DSRC for VANET’s safety applications. IEEE Transactions on Vehicular Technology 2013, 62, 3069–3083. [Google Scholar] [CrossRef]
- Wang, M.; Winbjork, M.; Zhang, Z.; Blasco, R.; Do, H.; Sorrentino, S.; Belleschi, M.; Zang, Y. Comparison of LTE and DSRC-based connectivity for intelligent transportation systems. 2017 IEEE 85th vehicular technology conference (VTC Spring). IEEE, 2017, pp. 1–5.
- Nguyen, T.V.; Shailesh, P.; Sudhir, B.; Kapil, G.; Jiang, L.; Wu, Z.; Malladi, D.; Li, J. A comparison of cellular vehicle-to-everything and dedicated short range communication. 2017 IEEE Vehicular Networking Conference (VNC), 2017, pp. 101–108. [CrossRef]
- Zhao, L.; Fang, J.; Hu, J.; Li, Y.; Lin, L.; Shi, Y.; Li, C. The performance comparison of LTE-V2X and IEEE 802.11 p. 2018 IEEE 87th Vehicular Technology Conference (VTC Spring). IEEE, 2018, pp. 1–5.
- Molina-Masegosa, R.; Gozalvez, J.; Sepulcre, M. Comparison of IEEE 802.11 p and LTE-V2X: An evaluation with periodic and aperiodic messages of constant and variable size. IEEE Access 2020, 8, 121526–121548. [Google Scholar] [CrossRef]
- Hameed Mir, Z.; Filali, F. C-ITS applications, use cases and requirements for V2X communication systems—threading through IEEE 802.11 p to 5G. In Towards a Wireless Connected World: Achievements and New Technologies; Springer, 2022; pp. 261–285.
- Petrov, T.; Sevcik, L.; Pocta, P.; Dado, M. A Performance Benchmark for Dedicated Short-Range Communications and LTE-Based Cellular-V2X in the Context of Vehicle-to-Infrastructure Communication and Urban Scenarios. Sensors 2021, 21. [Google Scholar] [CrossRef] [PubMed]
- Bazzi, A.; Masini, B.M.; Zanella, A.; Thibault, I. On the Performance of IEEE 802.11p and LTE-V2V for the Cooperative Awareness of Connected Vehicles. IEEE Transactions on Vehicular Technology 2017, 66, 10419–10432. [Google Scholar] [CrossRef]
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for sidelink 5G V2X vehicular communications: A new 5G technology for short-range vehicle-to-everything communications. IEEE Vehicular Technology Magazine 2017, 12, 30–39. [Google Scholar] [CrossRef]
- Cecchini, G.; Bazzi, A.; Masini, B.M.; Zanella, A. Performance comparison between IEEE 802.11 p and LTE-V2V in-coverage and out-of-coverage for cooperative awareness. 2017 IEEE Vehicular Networking Conference (VNC). IEEE, 2017, pp. 109–114.
- Vukadinovic, V.; Bakowski, K.; Marsch, P.; Garcia, I.D.; Xu, H.; Sybis, M.; Sroka, P.; Wesolowski, K.; Lister, D.; Thibault, I. 3GPP C-V2X and IEEE 802.11 p for Vehicle-to-Vehicle communications in highway platooning scenarios. Ad Hoc Networks 2018, 74, 17–29. [Google Scholar] [CrossRef]
- Qi, W.; Landfeldt, B.; Song, Q.; Guo, L.; Jamalipour, A. Traffic differentiated clustering routing in DSRC and C-V2X hybrid vehicular networks. IEEE Transactions on Vehicular Technology 2020, 69, 7723–7734. [Google Scholar] [CrossRef]
- Mir, Z.H.; Toutouh, J.; Filali, F.; Ko, Y.B. Enabling DSRC and C-V2X integrated hybrid vehicular networks: Architecture and protocol. IEEE access 2020, 8, 180909–180927. [Google Scholar] [CrossRef]
- Bazzi, A.; Bartoletti, S.; Zanella, A.; Martinez, V. Performance Analysis of IEEE 802.11 p Preamble Insertion in C-V2X Sidelink Signals for Co-Channel Coexistence. arXiv preprint arXiv:2201.07036 2022. arXiv:2201.07036 2022.
- Tahir, M.N.; Katz, M. Performance evaluation of IEEE 802.11 p, LTE and 5G in connected vehicles for cooperative awareness. Engineering Reports 2022, 4, e12467. [Google Scholar] [CrossRef]
- Gozalvez, J.; others. A New 5G Technology for Short-Range Vehicle-to-Everything Communications. IEEE veh. techn. magazine, 2017.
- 3GPP. Study on enhancement of 3GPP support for 5G V2X services. Tech. Rep. 22.886 V16. 2.0 2018.
- Lien, S.Y.; Deng, D.J.; Lin, C.C.; Tsai, H.L.; Chen, T.; Guo, C.; Cheng, S.M. 3GPP NR Sidelink Transmissions Toward 5G V2X. IEEE Access 2020, 8. [Google Scholar] [CrossRef]
- Garcia, M.H.; Molina-Galan, A.; Boban, M.; Gozalvez, J.; Coll-Perales, B.; Sahin, T.; Kousaridas, A. A Tutorial on 5G NR V2X Communications, 2021. [CrossRef]
- Vodafone Group Plc. RP-181480: New SID on NR V2X. 3GPP TDocs at meeting: RP-80 - 2018-06-11 to 2018-06-14, La Jolla, CA.
- TSG RAN; NR; Physical layer; General Description, Release 15, v16.0.0, document 3GPP TS 38.201, Jan. 2020. https://www.etsi.org/deliver/etsi_ts/138200_138299/138201/16.00.00_60/ts_138201v160000p.pdf. Accessed: 2022-12-15.
- ns-3 Tutorial. https://www.nsnam.org/docs/release/3.30/tutorial/singlehtml/index.html. Accessed: 2023-10-15.
| 1 | An initial result from this work has been presented at the IEEE WAMICON’23 conference. |
Figure 1.
System architecture of connected vehicular networks.
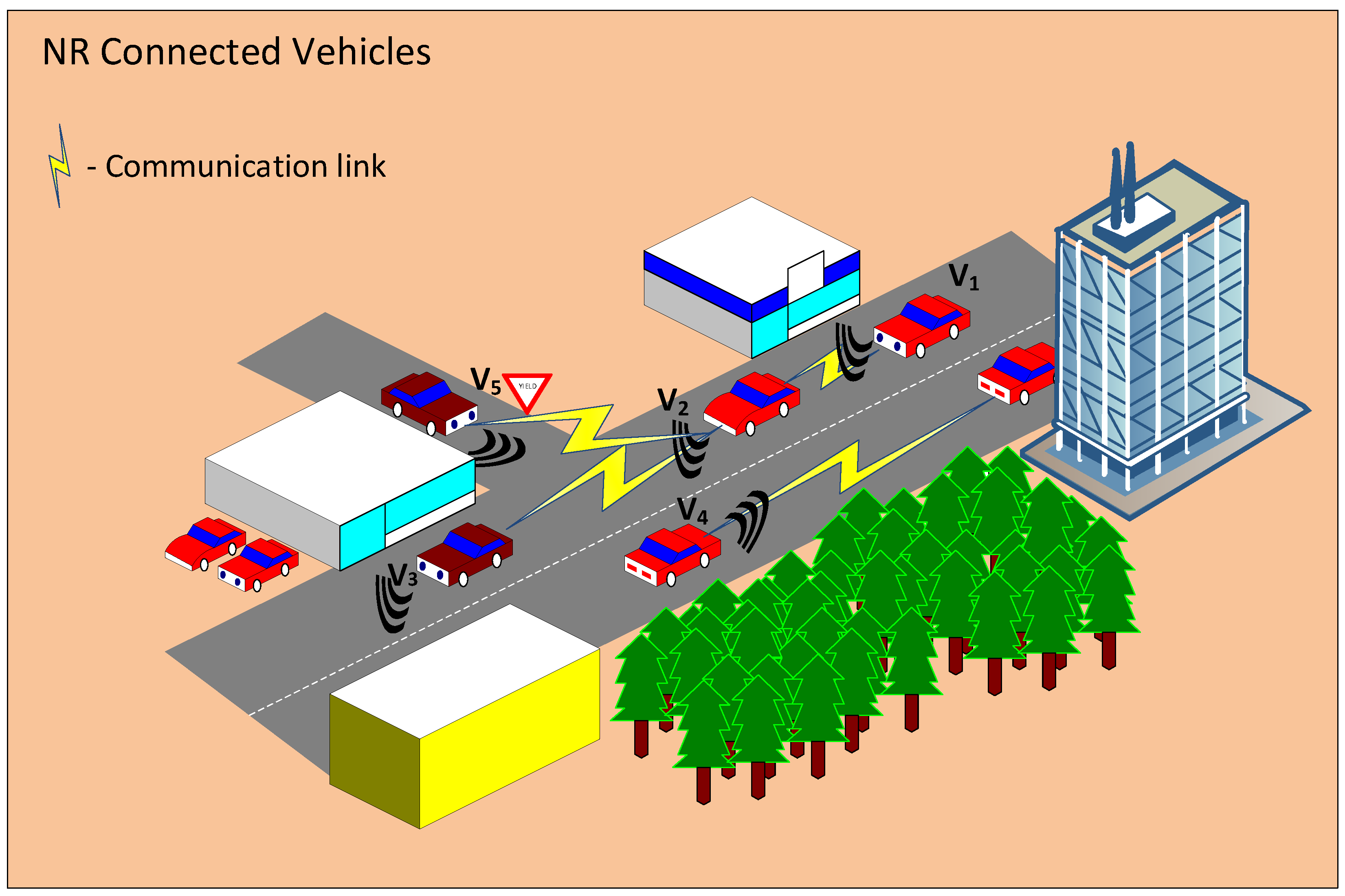
Figure 2.
NR V2X supported advanced applications and network features.
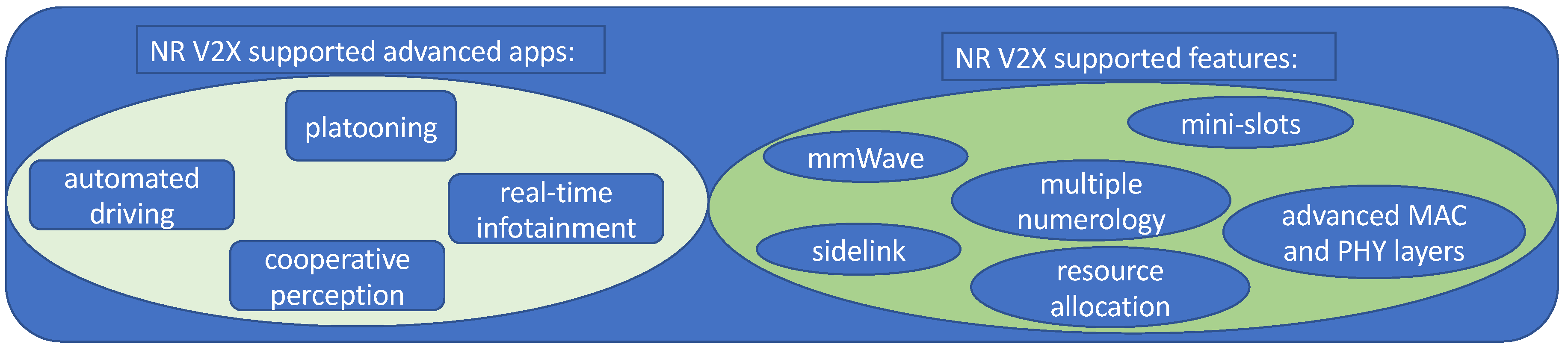
Figure 3.
Highway simulation scenario in ns-3.
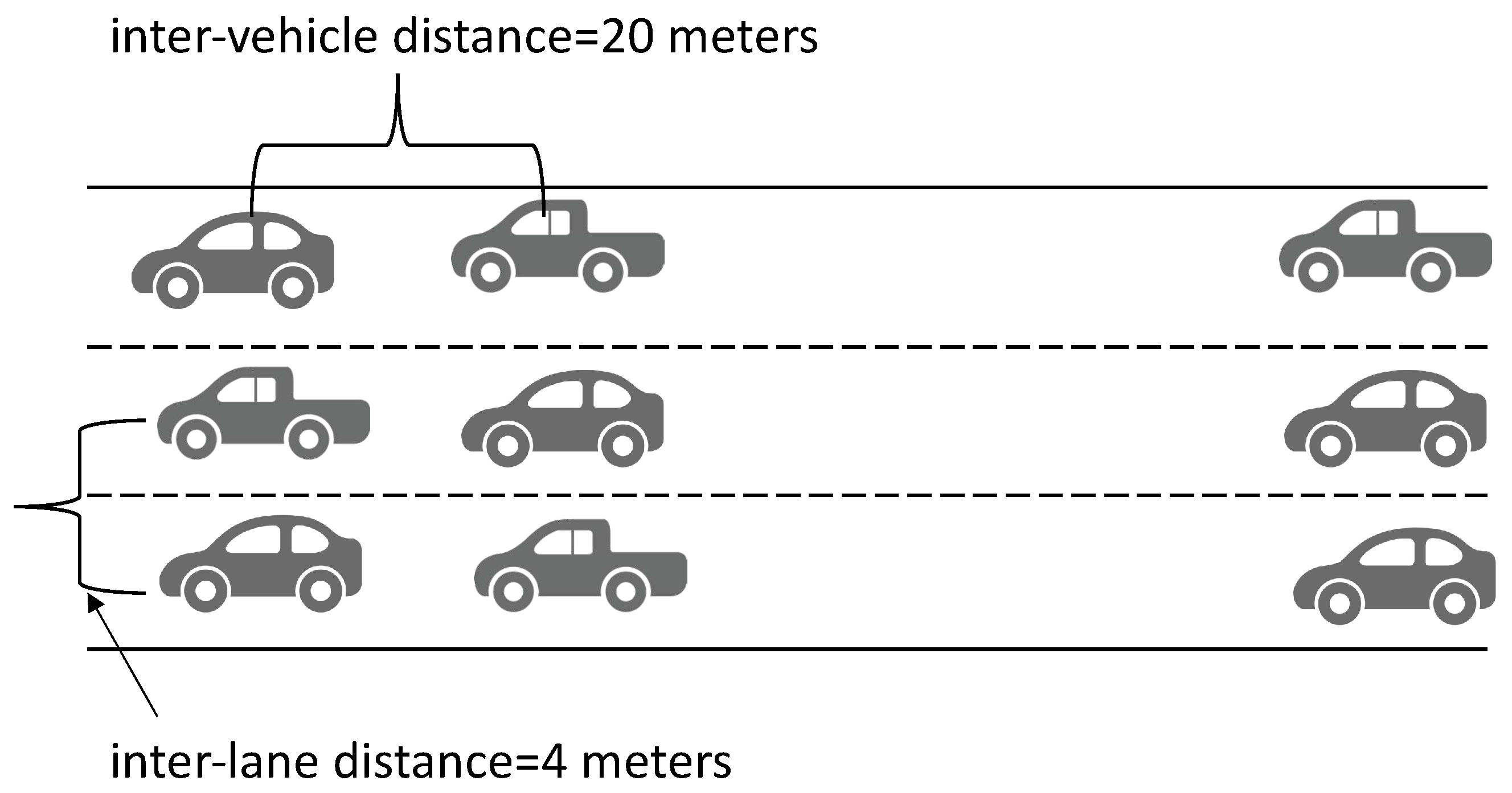
Figure 4.
Cumulative distribution functions of random variables representing the performance metrics: fig:cdfAvgPIR1 average PIR, fig:cdfAvgPRR1 average PRR, and fig:cdfAvgTHR1 average throughput for different numerologies.
Figure 4.
Cumulative distribution functions of random variables representing the performance metrics: fig:cdfAvgPIR1 average PIR, fig:cdfAvgPRR1 average PRR, and fig:cdfAvgTHR1 average throughput for different numerologies.
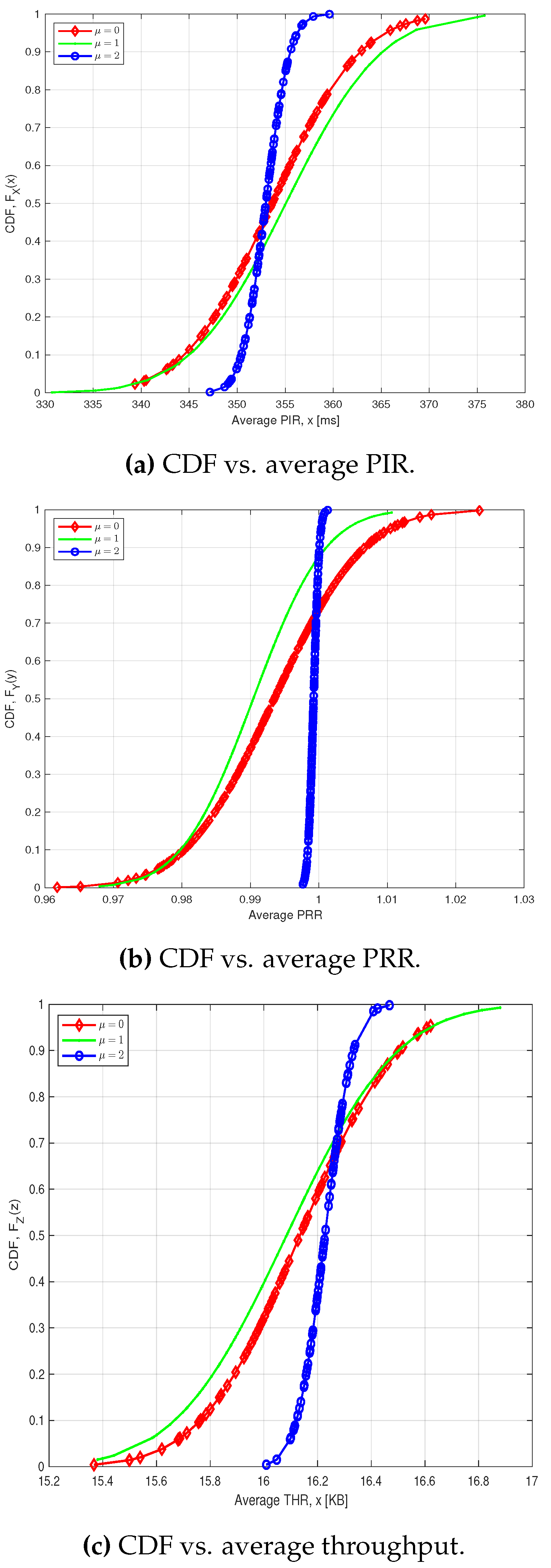
Figure 5.
Impact of communication range.
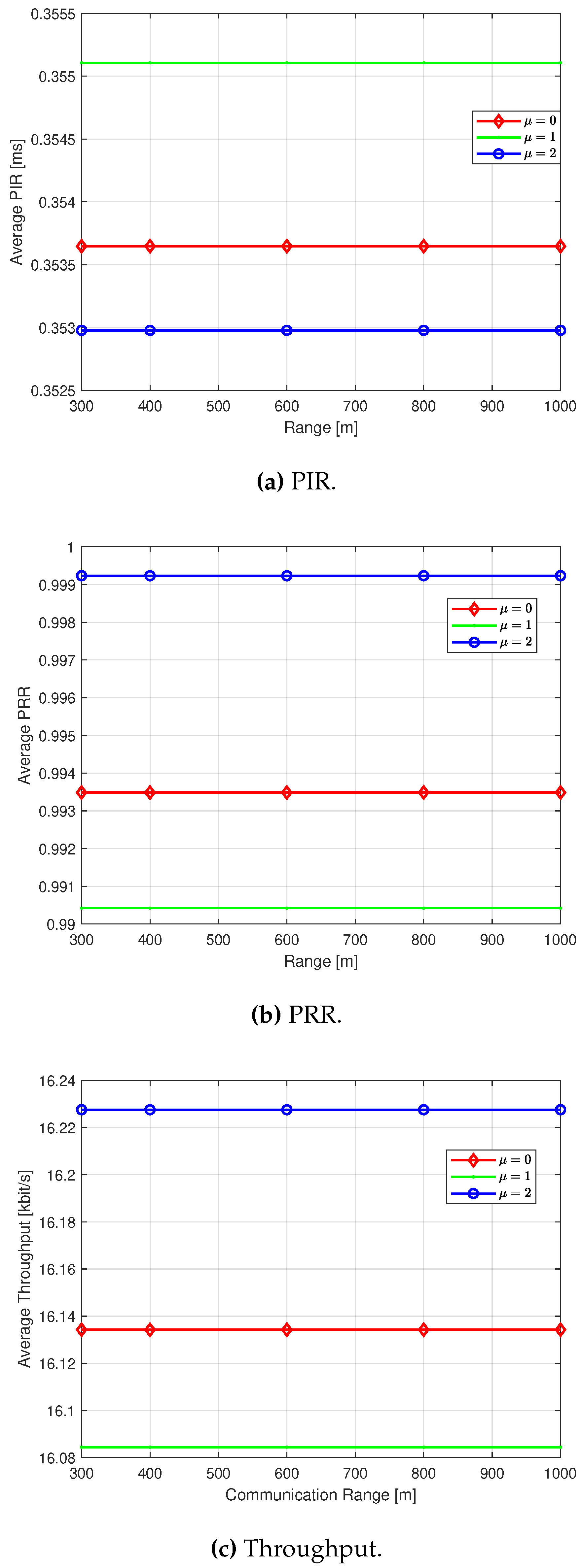
Figure 6.
Impact of transmit power.
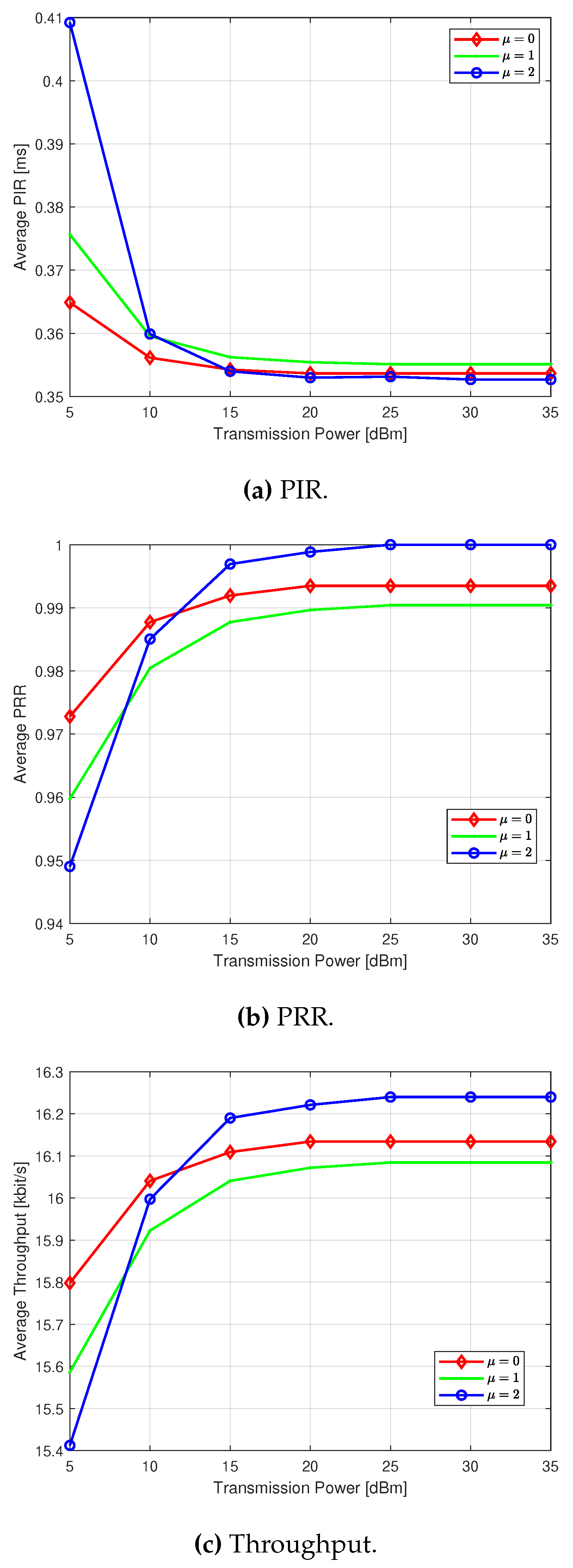
Figure 7.
Impact of packet size.
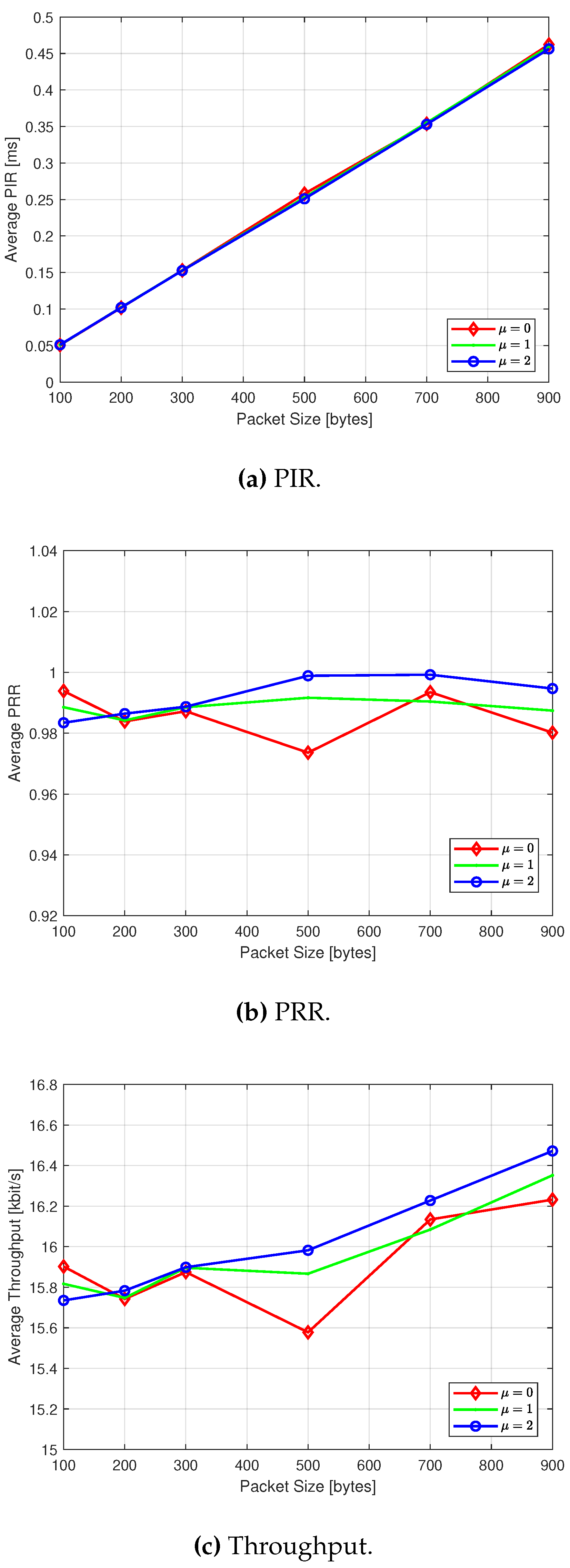
Figure 8.
Impact of modulation and coding scheme (MCS).
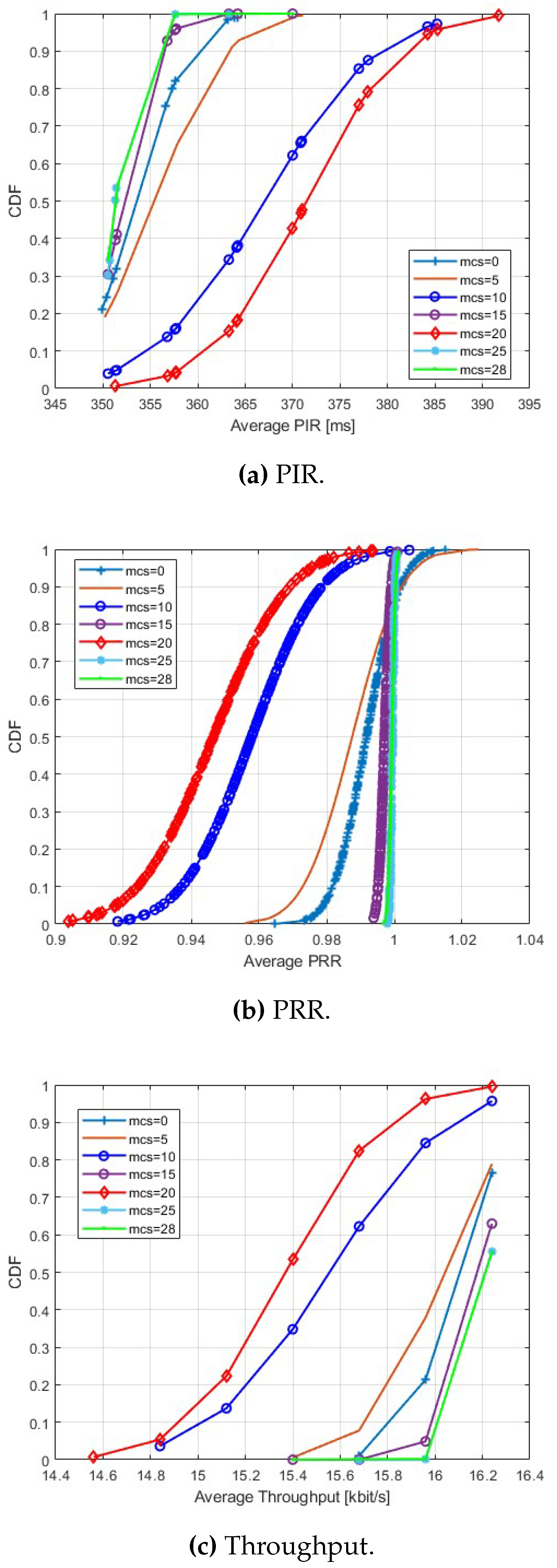
Figure 9.
Impact of modulation and coding scheme (MCS) with differ values.

| Parameters | DSRC | C-V2X | 5G-NR V2X |
|---|---|---|---|
| Origin/Base | IEEE 802.11p | 4G LTE | 5G LTE |
| Transmission range | Typically | • in PC5 mode (direct communication), • Several kilometers in Uu mode (cellular networks), • Tens of kilometers in hybrid mode (combination of direct and cellular) |
|
| Frequency range |
|
Sub | Sub and mmWave |
| MCS | BPSK, QPSK, 16-QAM, 64-QAM | • Rel. 14: QPSK, 16-QAM • Rel. 15: 64-QAM |
QPSK, 16-QAM, 64-QAM, 256-QAM |
| Re-transmission |
|
Blind |
|
| Usermultiplexing | Single user per symbol | Multiple users supported | Multiple users supported |
| Symbolduration | 8 | 71 | 66.7 (=0), 33.3 (=1), 16.7 (=2) |
| Concurrent transmission | optional | Yes | Yes |
| Sub-carrier spacing |
|
15 |
|
| Modulation | OFDM | FDM (Control and data multiplexing) SC-FDMA (Waveform) | TDM (Control and data multiplexing) OFDM (Waveform) |
Table 2.
ns-3 simulation parameters.
| Parameter | Value | Default |
|---|---|---|
| Number of vehicles per lane | 11 | |
| Number of lanes | 3 | |
| Inter-vehicle distance | 20 m | |
| Freeway max. vehicle speed | 38.89 m/s | |
| Broadcast message size | 100∼1500 bytes | 700 bytes |
| Transmission rate | 10 Hz | |
| Carrier frequency | Sub 6 GHz | |
| Channel bandwidth | 10 MHz | |
| Numerology () | ||
| Transmit power | 5∼35 dBm | 23 dBm |
| Communication range | 100∼1000 m | 600 m |
| Mobility model | Constant velocity mobility | |
| Simulation time | 20 sec. sim time |
Table 3.
Mean and standard deviations of PIR, PRR, and throughput for different numerologies.
| Parameter | |||
|---|---|---|---|
| [KB] | [KB] | [KB] | |
| [KB] | [KB] | [KB] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



