Submitted:
26 November 2025
Posted:
28 November 2025
Read the latest preprint version here
Abstract
Synchronization is a fundamental phenomenon in complex systems, with conventional theory positing that its stability crucially depends on network topology and system parameters. However, these information often incomplete in real world scenarios. Here, we derive a elegant boundary equation for synchronous stability and report a new type of spontaneous synchronization near the boundary. Simulation experiments and mathematical proofs demonstrate that both the boundary and spontaneous synchronization are independent of the network. These results challenge the structural foundation of synchronization on complex networks. The framework establishes that the emergence of synchronization phenomena originates from fundamental principles transcending network. This work offers a novel unified perspective on synchronization phenomena in diverse fields.
Keywords:
complex network
; spontaneous synchronization
; synchronous stability boundary
1. Introduction
Synchronization occurs when interconnected units—from fireflies to generators—adjust their rhythms to act in concert. This collective behavior is crucial for understanding the function of diverse complex systems [1]. Current research relies on a traditional framework to constructively understand synchronization. This framework posits that knowledge of the network architecture (e.g., the adjacency matrix) and each unit’s dynamics is a prerequisite for predicting collective outcomes [2,3].
This framework, however, faces some fundamental obstacles in real world systems: interactions are difficult to fully observe, structural data are incomplete, and exceedingly large networks lead to prohibitive computational costs [4,5,6]. These issues are compounded by higher-order interactions, nonlinear dynamics, and parametric uncertainties [7]. Power grids exhibit key complex network features and the dynamics of generators, described by the swing equation, is equivalent to the well-studied Kuramoto model [1,2]. Additionally, the very real world attributes of power grids, their vast scale, structural complexity, and dynamic nonlinearity, make them a domain where obtaining the requisite information is profoundly challenging. These factors make the power grid a suitable test bed for the synchronization of complex networks [8,9,10,11]. Currently, prevailing analytical methods for power systems have made significant progress, yet they remain constrained by these challenges [1,12,13,14,15,16]. Among these, two prominent strategies are the identification of the synchronous stability boundary, a cornerstone concept in grid stability defined as the union of critical points beyond which the system desynchronizes [15,17,18], and the study of spontaneous synchronization conditions, wherein systems self-organize without external guidance [2,16,19].
Here, we introduce a novel framework grounded in a principle (or consensus) regarding synchronization. This framework reveals that synchronous stability is governed by boundary. We derive and rigorously prove an elegant equation that universally describes this boundary for power systems. A pivotal insight is that this equation is independent of any specific network, providing a general criterion for stability. Here, the network encompasses both the network topology and the system parameters (e.g., line impedance, inertia constants and damping). To enable its application to multigenerator systems, we developed a novel and effective reduction method for higher-order interactions. This algorithm also holds potential for interdisciplinary applications. The validity of this boundary equation and the reduction algorithm is confirmed through mathematical proofs and simulation experiments.
This work also yielded other significant results. First, the boundary equation unifies the seemingly contradictory phenomena of symmetry and asymmetry, showing that both can enhance synchronization. Second, we identify a new type of spontaneous synchronization that emerges exclusively near the stability boundary and is therefore likewise independent of the network. Most significantly, these findings, particularly the network-independent nature of both the stability boundary and the associated spontaneous synchronization, challenge the structural basis of synchronization on complex networks. This framework provides a unified and powerful approach to studying synchronization amid real-world complexity and uncertainty, with conclusions that have direct implications for a wide range of disciplines.
Stability boundary
Synchronization emerges when the suppression (of the loss of synchrony) dominates the dissimilarity, a simple principle regarding synchronization from which we derive the synchronization stability boundary equation [2]. The system is synchronous and stable when the suppression term , exceeds the dissimilarity term and loses synchronization when . Consequently, the condition = defines the synchronous stability boundary, described by the following equation (see appendix B):
Strictly speaking, this equation defines the boundary of the physically admissible domain—that is, the set of all possible system states that comply with fundamental physical laws (see appendix D). In this paper, we interpret this physically admissible domain as representing the system’s synchronization stability region. This explanation is reasonable for two reasons: 1) physical existence is a prerequisite for stability; 2) for power systems, our experiments confirm that the two boundaries are indistinguishable in all tested scenarios.
In power systems, the voltages and of the Kth and the Lth generators, and the angle difference of their rotation rates (where ) are considered. Here, the rotation rate of a generator is characterized by an angle of rotation rate (ARR) (not the phase angle), and synchronization corresponds to . The voltage has been previously overlooked for simplicity [16,20] but is crucial for the synchronization stability of the grid [refer to Figure 1(c)].
Eq. (1) actually defines the synchronous stability boundary for two generators. For multigenerators systems, since all boundary equations of pairs of generators share identical forms, the visualized graphs completely coincide, as shown in Figure 1(a).
The expression in Eq. (1) establishes a formal link between synchronous stability and “pairwise interactions.” It is crucial to note, however, that the interactions among generators are inherently higher order. Therefore, to enable stability analysis within this framework, our method employs a mathematical transformation (Eq. S2) that maps these higher-order interactions into pairwise interactions between meta-generators. The meta-generator is the direct result of this transformation, and its successful application (as detailed in Figure 1 and Figure 2) validates its functional equivalence to an effective reduction method. Unlike the generator system, for the Kth and the Lth meta-generator, L=K+1. Unlike the generator perspective (Figure S2), the meta-generator framework endows the “synchronization stability” relation with the property of an equivalence class. This crucial property thereby provides a rigorous foundation for analyzing synchronization stability at the subsystem level and for investigating phenomena such as partial synchronization (Figures 1(b) and 2(a)).
Critically, this transformation preserves synchronization stability (see appendix F), which ensures a strict equivalence in the stability states between the generator and meta-generator systems. This equivalence establishes a powerful validation framework: demonstrating that the stability boundary correctly classifies the meta-generators (Figure 1 and Figure 2) directly confirms its validity for the original generator system. This algorithm has no direct connection to specific physical scenarios, and therefore can be applied directly across different disciplines.
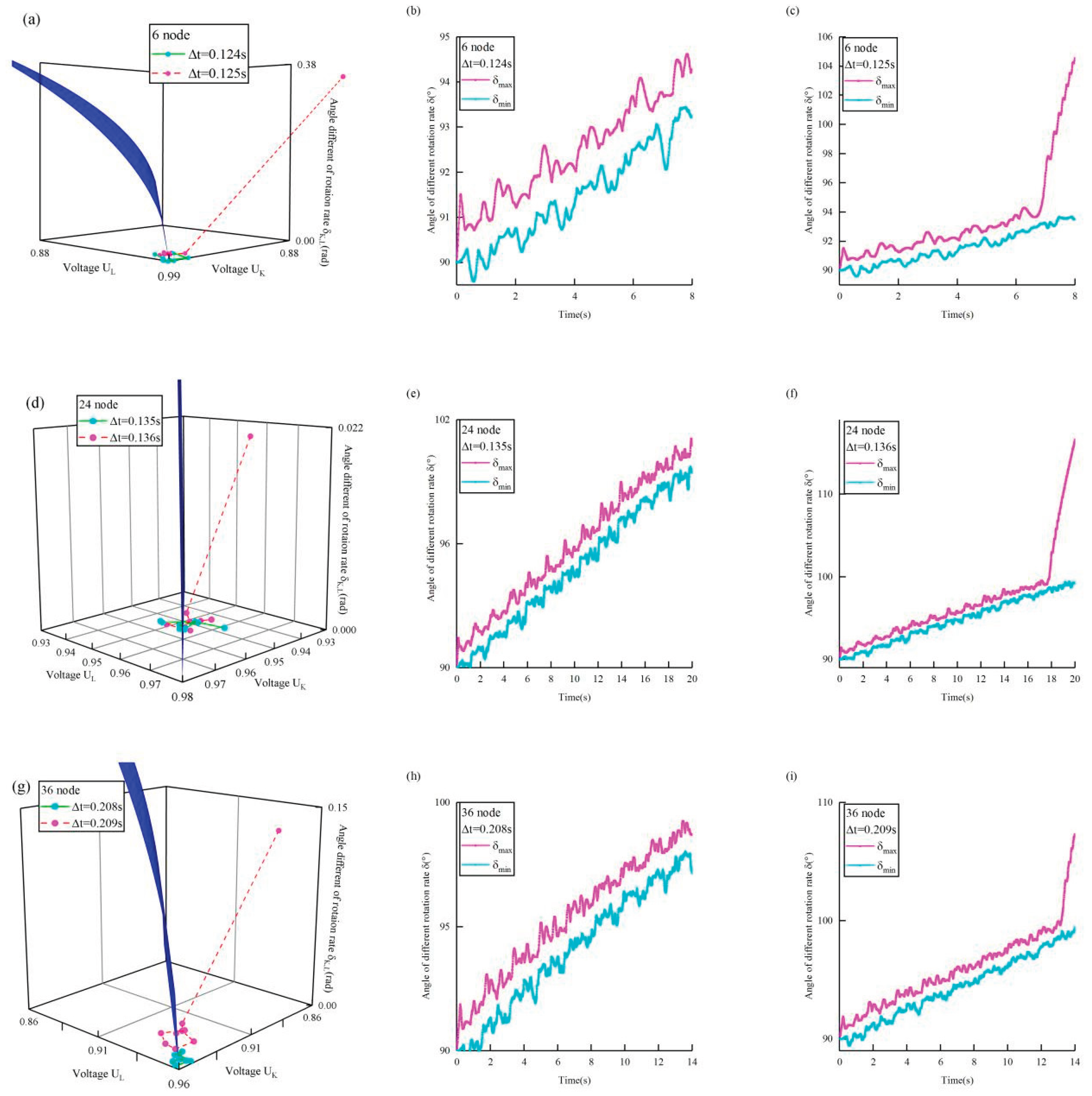
A New England test system was used. A three-phase short-circuit ground fault occurred at node 18. The data in Figure 1 are derived from numerical simulation experiments. represents the fault clearing time, and denotes the step length typically used in power system studies.
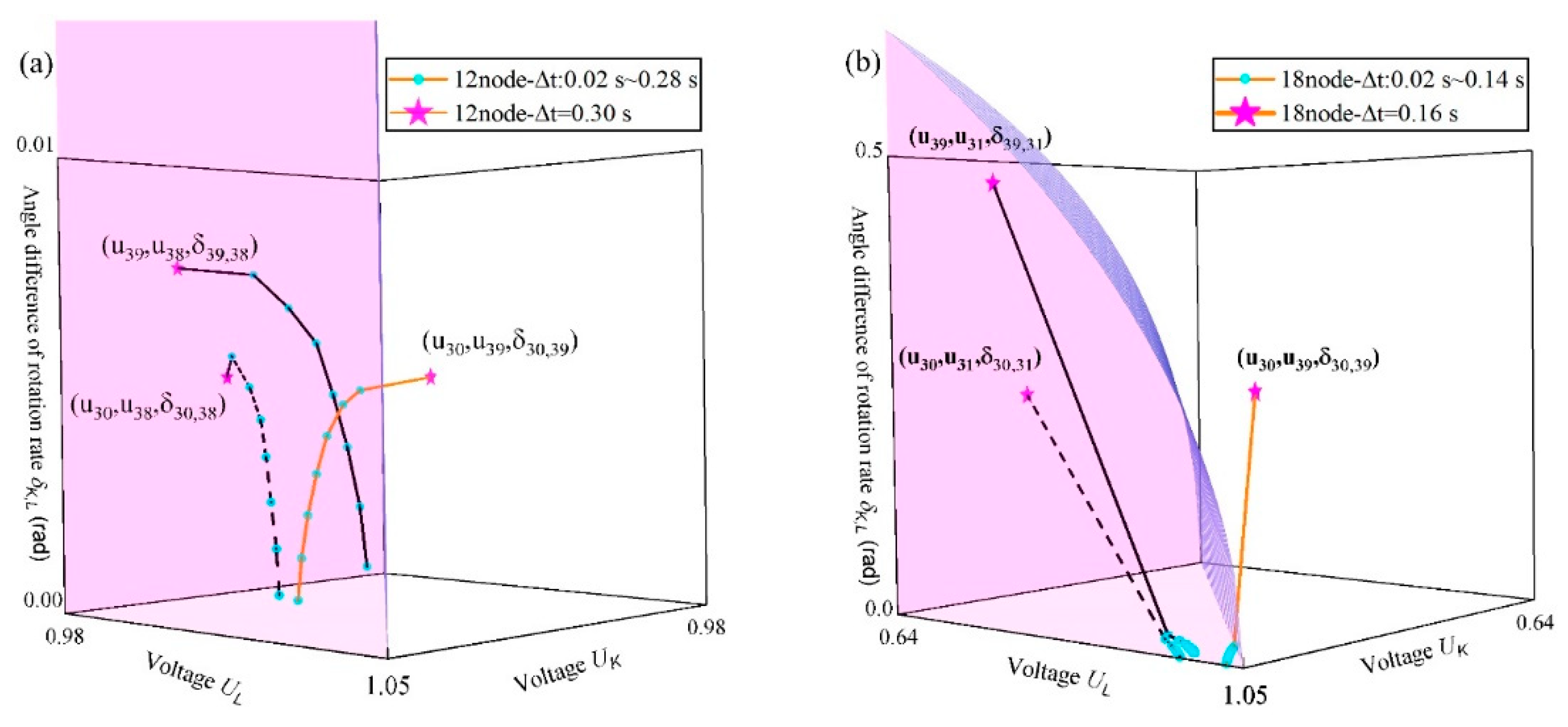
(a). Visualization of the stability boundary. The stability boundary in Eq. (1) (blue surface and dark green plane) and the pink planes , and collectively define the boundaries and enclose the stability domain. The identical boundary form enables a unified stability assessment.
(b). Synchronization stability and partial synchronization. represents the three-dimensional (3D) coordinate point formed by the Kth and Lth meta-generators. are calculated via Eqs. (S3) and (S4). At fault clearing time , all coordinate points cluster near the boundary (cyan). At , three coordinate points [,, and ] deviate outside the boundary, whereas the others remain clustered near it (magenta). The position of the point relative to the boundary directly diagnoses the synchronization state.
(c). Tracking the onset of desynchronization. The temporal trajectory of coordinate point is shown for the unstable case (). The calculation range is . Each cyan point represents the mean position of for a period of 1 second. The time T and the time interval are defined in Eq. (S5). The trajectory crosses the stability boundary outwardly [(7 s, 8 s)], preceding a rapid increase in the angle difference [(9 s,10 s)]. The outward crossing of a trajectory across the boundary pinpoints the onset of synchronization loss.
(d) and (e). Experimental validation of the stability ( and ). The horizontal axis represents the time. The vertical axis represents the value of . are calculated with simulation software and Eq. (S2). The maximum value is represented by (magenta), and the minimum value is represented by (cyan). In the stable case (), , indicating sustained synchronization. In the unstable case (), increases sharply after 9 s (), confirming system desynchronization.
(f). Experimental verification of partial synchronization. . Meta-generator 1 (cyan line) desynchronizes after ~9 s, followed by meta-generators 2 (orange dashed line) and 10 (magenta line). Meta-generators 3~9 form a synchronized cluster (green lines). This pattern matches the cluster prediction from the spatial distribution in (b).
Figure 1(a) visualizes Eq. (1) within a three-dimensional (3D) coordinate system. Geometrically, the surfaces defined by Eq. (1) are fixed, which provides an intuitive indication of its independence from network topology and system parameters. We now proceed to validate this conclusion experimentally. Three lines of evidence confirm that Eq. (1) universally describes the synchronization stability boundary: 1) it distinguishes stable from unstable states [see Figures 1(b) and 2(a)], 2) it captures the stability of multiple swings [see Figures 1(c) and 2(b)], and 3) it explains partial synchronization patterns [see Figures 1(f) and 2(e)].
The boundary equation provides a definitive geometric criterion for power system stability. For a system with n meta-generators, the state is represented by n-1 points in a 3D coordinate space. This representation reveals a powerful discriminative capability: as shown in Figure 1(b), a minute increase in fault clearing time from to , a change of merely 0.001 s, causes a dramatic shift in system behavior. Under stable conditions (, cyan), all points cluster at the boundary, whereas at the instability threshold (, magenta), specific points (,, and ) deviate outside it. This spatial deviation is the direct geometric manifestation of the condition , signifying a loss of synchronization. The definitive correspondence between a point’s position relative to the boundary and the system’s physical state is rigorously validated by time-domain simulations: the clustering of cyan points coincides with a bounded difference in in Figure 1(d), whereas the deviation of points from the boundary predicts the large, growing desynchronization evident in Figure 1(e). The reproducibility of this exact discriminative function in the topologically distinct 3-generator system (Figure 2(a), (c) and (d)), along with analogous results under varied fault scenarios (Figure S5), provides robust, multiscenario evidence that the boundary’s role as a stability criterion is an inherent property, independent of the network topology or perturbation [2,21,22]. To thoroughly validate the universality of the boundary equation, we conducted tests on all 39 nodes of the New England test system (Table S1 for details). Across all 78 stable and unstable cases, Eq. (1) achieved discrimination with an accuracy of 100%.
Furthermore, Figure 1(b) provides a novel and direct geometric diagnosis of partial synchronization. The positions of the 9 coordinate points reveal distinct synchronization clusters. Specifically, points , , and residing outside the boundary indicate that the corresponding meta-generators (1st, 2nd, and 10th, respectively) have lost synchronization stability. This result effectively divides the system into four synchronization groups: three desynchronized individual units (1st, 2nd and 10th) and one synchronized cluster comprising meta-generators 3rd through 9th. The time-domain results in Figure 1(f) are in perfect agreement with this diagnosis, confirming the manifestation of cluster synchronization[23,24]. Our approach thus offers a unified geometric interpretation for this phenomenon: cluster synchronization arises from the localized loss of synchronization stability between oscillators when their representative coordinate points lie outside the universal boundary[25,26]. This mechanism, which improves our understanding of partial synchronization, is further corroborated by additional data (Table S1). Critically, this diagnostic framework is universally applicable in power systems, as demonstrated by the consistent combination of geometric diagnosis in Figure 2(a) and time-domain validation in Figure 2(e) for the completely different 3-generator systems.
Figure 1(C) captures the system’s transition from stability to instability, showing coordinate point crossing the boundary outwardly during the time interval (8 s,9 s). This event is the direct precursor to the subsequent physical response: a dramatic increase in the angle difference during (9 s,10 s), which leads to the eventual loss of synchronization, as confirmed by the time-domain simulation in Figure 1(E). The consistent temporal sequence—boundary crossing preceding desynchronization—establishes that this crossing marks the real-time onset of synchronization loss. This demonstrates the boundary’s capacity as a dynamic predictor, capable of discriminating the complex phenomenon of multiswing stability for multiple generators[27,28]. Critically, this entire sequence of events, from boundary crossing to desynchronization, is replicated in the completely different 3-generator system (Figures 2(b) and (d)), underscoring universality of the predictive power across networks. Furthermore, the critical role of the voltage term in this predictive boundary suggests that the common assumption of disregarding voltage variations [8] may be inadequate when the system approaches the stability boundary, even for short-term dynamic studies. Ultimately, the synergy between the long-term stability assessment in Figure 1(b) and the short-term transient prediction in Figure 1(c) confirms that the same boundary equation governs stability across different time scales and operational scenarios. This coherence underpins a unified framework for synchronous stability analysis in power systems.
The same analysis as in Figure 1 is applied to the 3-generator system. A three-phase short circuit to a ground fault occurred at the 4-node.
(a). Synchronization stabilization discrimination and partial synchronization. Two coordinate points cluster at the boundary when stable (, cyan dots). is outside the boundary and away from when unstable (, magenta dots).
(b). Stability of multiple swings for multiple generators. . Mirroring the dynamics in Figure 1(c), crosses the boundary outwardly in the time interval , and rapidly increases in the time interval . These findings are in good agreement with the results presented in Figure 2(d).
(c) and (d) show the experimental validation of the synchronous stability and the stability of multiple swings for multiple generators. The time-series data corroborate the state predictions in (a), showing maintained synchrony at () and loss of synchrony at ().
(e). The phenomenon of partial synchronization. (). After approximately 4 s, the system splits into two synchronized clusters. Meta-generator 1 disengages from the cluster (black line). Meta-generators 2 and 3 form a synchronized cluster (red line and blue line).
The 10-generator New England system and the 3-generator system are two canonical test systems recognized as completely distinct in scale, topology, and system parameters, such as line impedance and generator inertia [29,30]. The successful replication of the boundary’s core functions, stability discrimination, multigenerator and multiswing instability prediction, and partial synchronization diagnosis, across these disparate systems provides a formidable foundation for a robust and universal conclusion. Together, this robust, multifaceted validation rigorously demonstrates the recognition that the synchronization stability boundary is independent of network topology, system parameters, and perturbation locations. We demonstrate that the emergence of the stability boundary, as a key function of the network, can be directly established on a simple principle rather than being governed by structural details. This independence between function and network challenges the structural foundations in complex networks [2,21,22]. This finding is further underpinned by rigorous mathematical proof which directly links the emergence of synchronization to the fundamental principle (see appendix D).
By bypassing reliance on network structure and parameters, this framework can judge stability directly from individual state measurements. It thus offers a radically simplified approach to analyzing stability in complex systems. It is particularly noteworthy that the boundary equation was identified prior to its physical interpretation (Appendix B). This sequence of discovery suggests that the boundary may be rooted in an origin more fundamental than any specific disciplinary context. A key piece of evidence lies in the fact that the generator swing equation used in this work for independent validation is equivalent to the Kuramoto model [1,2]. This equivalence implies that our findings reveal a universal law applicable to all oscillator networks of the same type. Furthermore, the stability boundary derived in this paper, along with its network-independent nature, fundamentally defines the synchronous stability limits for a broad class of oscillator networks. Based on this, extending the “amplitude–frequency” framework (such as and in this work) established in this study to other disciplines such as biological rhythms and chemical oscillators has become a highly promising direction for future research [31,32,33].
This line of inquiry, in turn, leads us to more profound questions: Do other features, similarly independent of structure, exist in complex systems? If so, what is their physical origin? And could their existence imply an underlying, unified description of complex systems?. Seeking answers to these questions is precisely the crucial step toward a new cognitive landscape centered on emergence.
Important implications can be derived from the expression of Eq. (1). Specifically, the left-hand side of Eq. (1) represents the global stability domain [21] (i.e., when ,).
represents a manifestation of the symmetry of the system. Such symmetry typically originates from underlying topological symmetries in the network and the homogeneity of the oscillators. This finding explains why high symmetry can facilitate synchronization in complex networks and aligns with established understanding [34,35].
Conversely, the variant form of the right-hand side of Eq. (1) is as follows:
reveals that asymmetry can also enhance stability. Such asymmetry often stems from topological asymmetries or heterogeneity. Here, represents the stability margin of the Kth and Lth meta-generator angle difference of the rotation rate; that is, for , the system remains synchronously stable when . When are sufficiently close [36], tends to 0. Crucially, increases with increasing voltage asymmetry , indicating that the stability domain expands as the system becomes more asymmetric. This finding explains the recently observed synchronization facilitation phenomenon in highly asymmetric systems [37,38]. These findings suggest a practical advantage: because perfect symmetry is fragile under perturbation, designing for controlled asymmetry can be a preferable strategy for maintaining stability. When , the Kth and Lth meta-generators are not synchronized. Thus, the range of the synchronous stability domain is finite under asymmetric conditions.
Consequently, both high symmetry and high asymmetry may promote synchronization. The expression of Eq. (1) is very simple, however, it harmonizes these two contradictory conclusions well and requires no prior analysis of the network structure.
Spontaneous synchronization in a power system
To understand how systems fail, it is equally important to investigate the behavior of a disturbed system at the stability boundary [39]. When perturbed and near this brink, the system’s trajectory, described by the polar coordinate variable () of the meta-generators, reveals a surprising structure indicative of spontaneous synchronization.
The fault clearing time increases from 0.140 s to 0.155 s. The 18-node three-phase short circuit to the ground fault. .
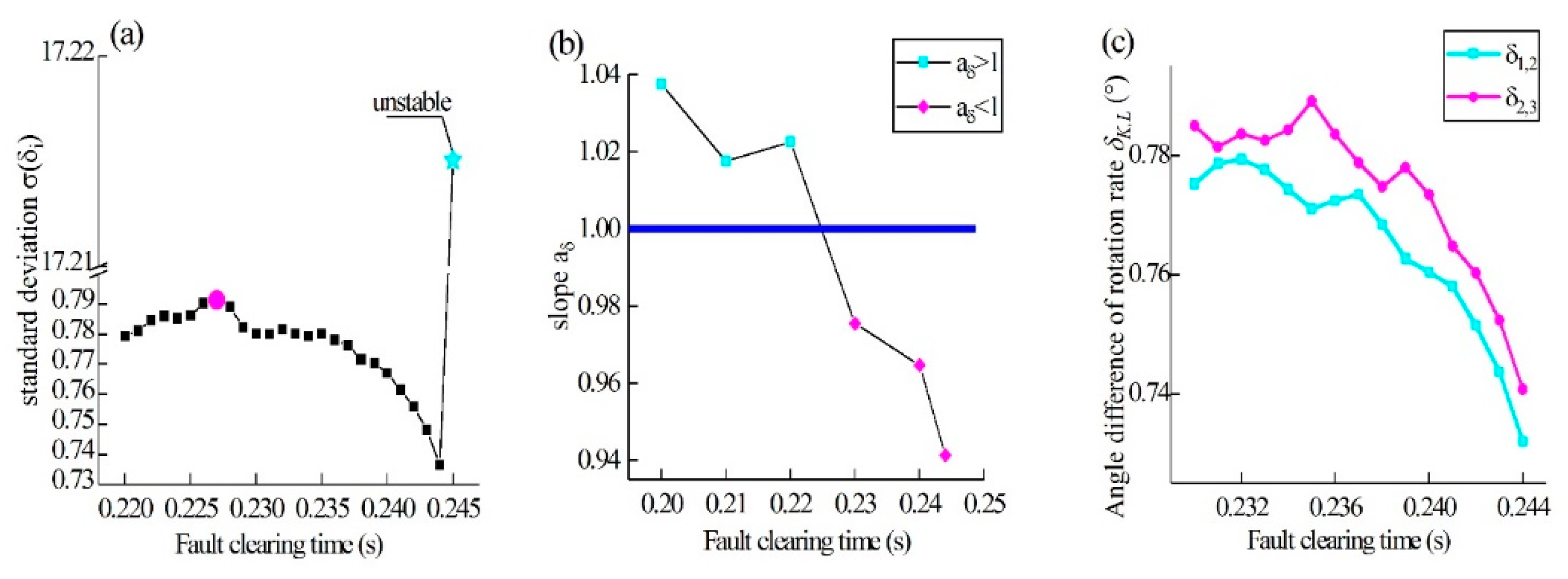
(a). Spontaneous synchronization of meta-generators. The horizontal axis represents the fault clearing time. The vertical axis represents the standard deviation of . The yellow area indicates the thin layer where spontaneous synchronization occurs. Here, the standard deviation begins to decrease at 0.147 s (magenta) and increases by 1300% at 0.155 s (cyan) when the system is unstable. can be calculated via Eq. (S6).
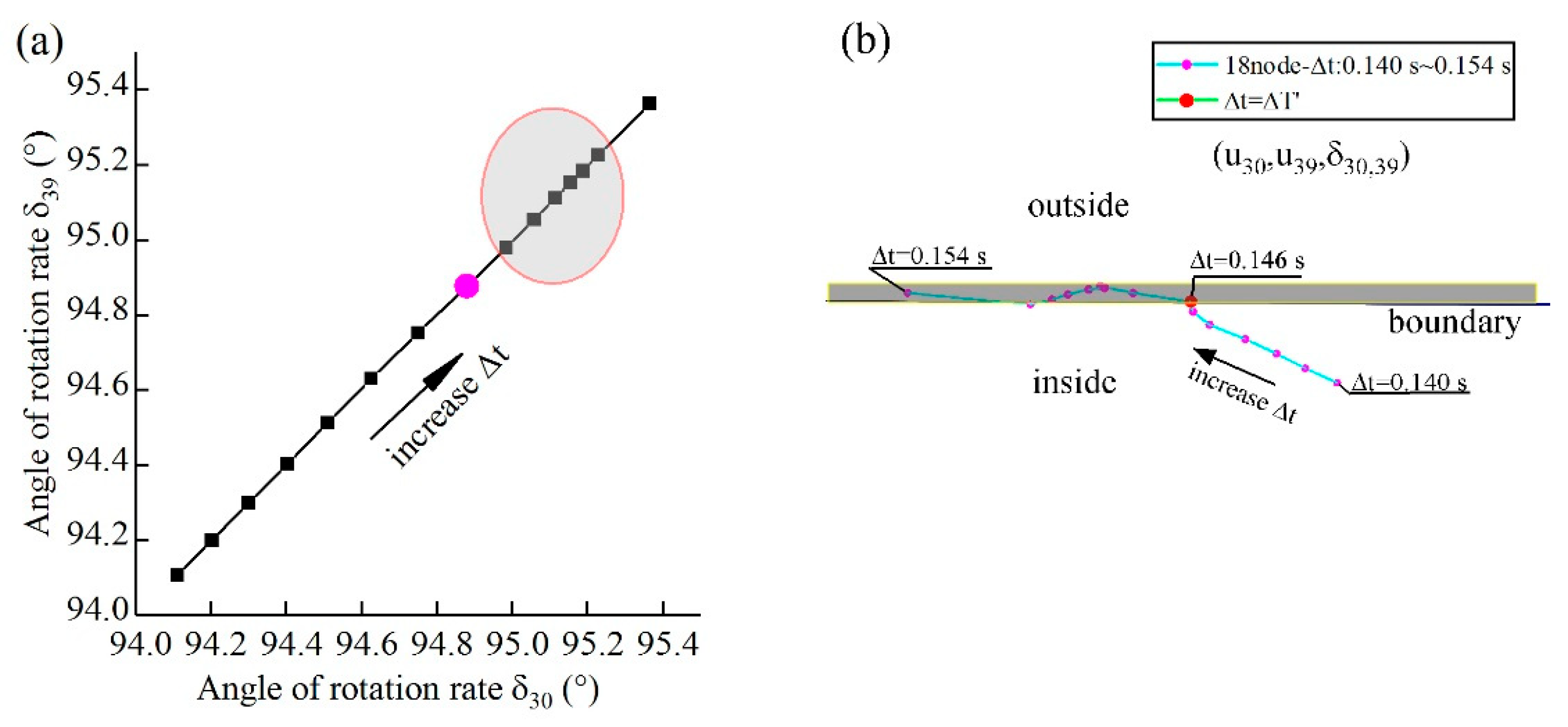
(b). Phenomenon of the potential barrier. increased from 0.140 s to 0.154 s. The black arrow indicates the direction in which increased. From (the magenta dots) onward, the distance between neighboring points decreased in the direction of the black arrow (elliptical shaded area).
(c). Starting points of spontaneous synchronization. The horizontal axis represents the fault clearing time. The amplified points indicate the starting points of spontaneous synchronization. All the starting points appear at . The trends of all were almost identical. Combining (b) and (c) reveals that in this case, the structures in (b) exist between any two meta-generators.
We report a phenomenon of spontaneous synchronization that occurs as the system approaches the stability boundary. This is evidenced by a decrease in the standard deviation (Figure 3(a)), indicating that the subsystems’ velocities spontaneously converge toward the mean value, a hallmark of synchronization [13,40]. Crucially, this self-organization is confined to a thin layer (yellow region in Figure 3(a)) immediately preceding the eventual loss of stability at . The phenomenon of spontaneous synchronization has been observed across different fault locations (Figure S4) and in distinct test systems (Figure S1), confirming its universality as an intrinsic characteristic of systems approaching the stability boundary. For power systems, this spontaneous synchronization provides a built-in and additional protection for grid stability.
The system’s trajectory in state space reveals a unique structural signature associated with this phenomenon. For a constant step size , the distance between successive states decreases within the shaded area of Figure 3(b), forming a structure termed a “potential barrier” that exhibits a collective decelerating motion. This spatial manifestation of deceleration emerges precisely at the temporal onset of spontaneous synchronization, i.e., when begins to decrease at (the magenta dots correspond exactly to in Figure 3(b).). To our knowledge, this structure has not been previously reported. A comparison between Figure S3(a) and Figure 3(b) confirms that this barrier structure is not a misleading result introduced by Equation (S2), as it is also present in the generator’s dynamic data. We hypothesize that the formation of ‘barriers’ may be related to the long-range correlations emerging near critical points within the system. This global cooperative dynamics manifests here as trajectory clustering and deceleration.
The precise timeline of spontaneous synchronization is delineated by a distinct transition in the indicator . As shown in Figure 3(c), the value of for all meta-generators undergoes a simultaneous and coherent shift at (amplified points). This timing coincides exactly with the moment when the standard deviation begins to decrease in Figure 3(a), unambiguously linking the reversal in to the onset of spontaneous synchronization. Prior to this moment, remains positive; immediately afterward, becomes negative and remains so. This system-wide reversal indicates that is the starting point of the spontaneous synchronization phase. The phase end is clearly indicated by the system’s loss of synchronization at , a state change that is demonstrated by the dramatic increase in the standard deviation in Figure 3(a) and the corresponding time-domain simulation results in Figure 1(e). Thus, the metastable window of spontaneous synchronization is bounded between and .
This newly identified spontaneous synchronization constitutes a distinct phenomenon, separate from those previously reported in power grids [11,16]. Existing phenomena typically describe how systems self-organize into synchronized states. In contrast, the novel spontaneous synchronization is uniquely characterized by its occurrence during a forward, perturbation-driven process toward instability and its association with the novel “potential barrier” structure. Second, and more critically, its emergence is strictly confined to the immediate vicinity of the synchronous stability boundary, as evidenced by experimental results under multiple fault scenarios (Figures 3(a) and S4). This refers to the situation where, during spontaneous synchronization, the position of the coordinate point in the 3D coordinate system lies on the boundary. The intimate link between spontaneous synchronization and the stability boundary leads to a profound implication: spontaneous synchronization is independent of the underlying network. Specifically, this independence refers to the fact that its locus within the 3D coordinate system is independent of the network. We corroborate this conclusion by demonstrating the recurrence of the phenomenon in an entirely different 3-generator test system (Figure S1(a)). This independence directly undermines the traditional viewpoint in which spontaneous synchronization is fundamentally governed by network structure [41]. Moreover, the coemergence of this phenomenon with the boundary suggests that they may share a common, deep physical origin.
Our findings, particularly the diversity of behaviors near the stability boundary (e.g., contrasting outcomes in Figures 3 and S1), highlight a crucial question: how to understand the behavior of coupled oscillators before instability occurs. Key questions remain, including the specific conditions for the formation of the potential barrier and the physical determinants of the thickness of the spontaneous synchronization layer. Resolving these questions will be a primary objective of our future research.
Appendix A: Power grid datasets
This study validates the proposed method using two standard and entirely distinct power grid test systems, namely, the WECC 3-generator (3-gen) and the New England 10-generator (10-gen) systems, which differ in network topology, scale, and system parameters. The use of these fundamentally different networks is critical, as it demonstrates the broad applicability of our approach beyond any single, specific system.
For each system, the datasets comprise the dynamic parameters of the generators, the net injected real power at the generator buses, the load demand at the nongenerator buses, and the parameters of all the transmission lines and transformers. This information is sufficient for performing standard power flow and subsequent stability analyses [37].
WECC 3-generator test system (3-gen) [29]. This system represents the Western System Coordinating Council (WSCC), which is part of the region now named the Western Electricity Coordinating Council (WECC) in the North American power grid. There are 3 generators in the system.
New England test system (10-gen) [30]. The IEEE 39-bus system is the 10-machine New England Power System. The prototype of the IEEE 39-node system is a model of an actual power grid in New England. There are 10 generators in the system.
The simulation results from these datasets are presented throughout the paper, with the New England system results primarily shown in Figures 1, 3, and S2-S5, and Table S1, and the 3-generator system results in Figures 2 and S1.
Appendix B: Derivation of the boundary equation
The boundary equation with
Synchronization emerges when the suppression (of the loss of synchrony) dominates dissimilarity. This is a simple principle (or consensus) regarding synchronization [2]. Here, suppression includes the effects of coupling and dissipation.
The suppression strength between the nodes is quantified by , and the dissimilarity between the nodes is quantified by . and have the same dimension and can be directly compared in size. As a natural corollary of the consensus, the boundary is defined by the equality between the suppression and the dissimilarity. Thus, the synchronization stability boundary equation is expressed as . When , the system is synchronous and stable. Conversely, when , the system is out of synchronization and unstable.
Figure 1.
Schematic representation of the key quantities and in the polar coordinate system.
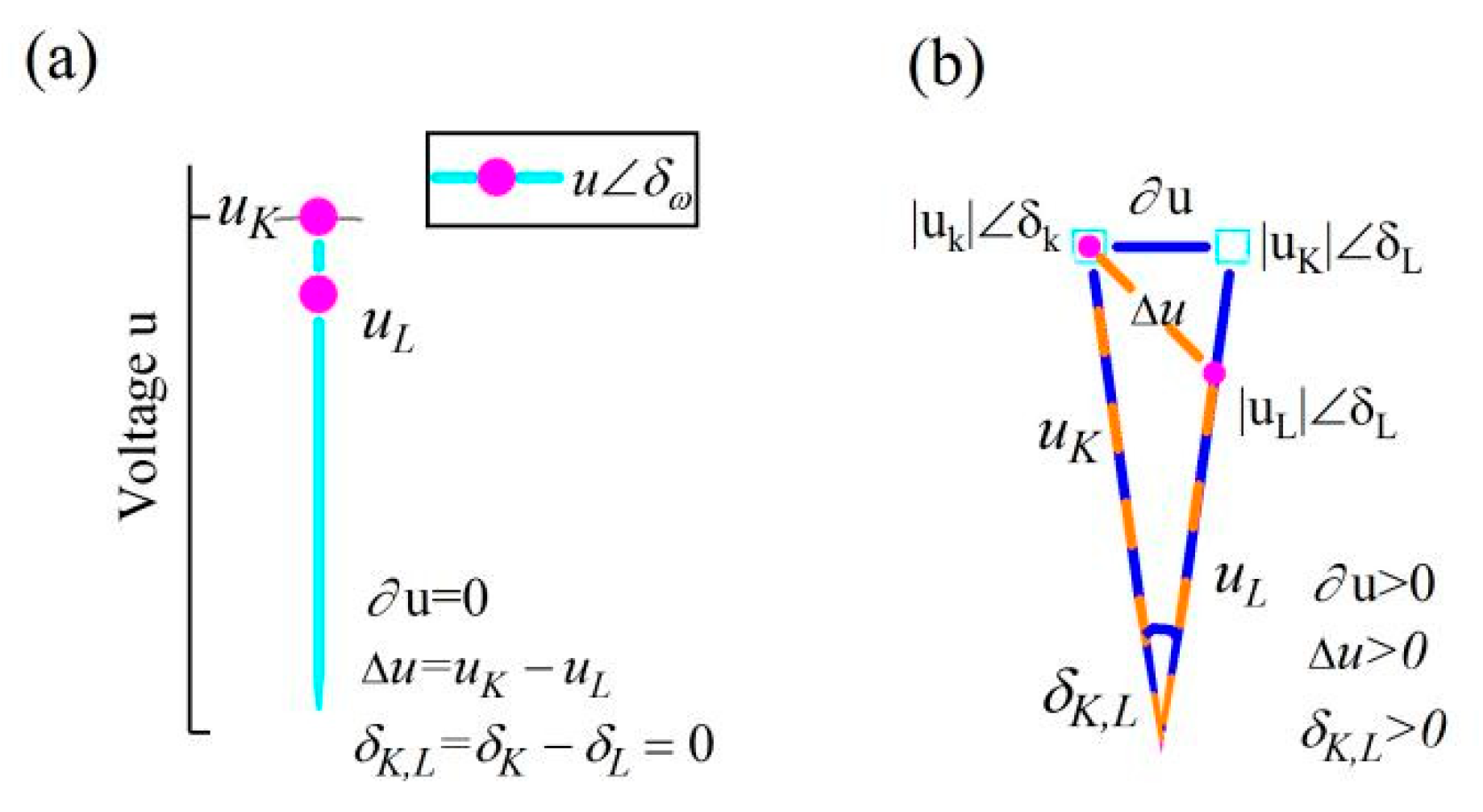
Fig. B1 provides an analogical interpretation using a phasor diagram for power system analysis. represents the “suppression potential difference”, while represents the “dissimilar potential difference” between the K-th and L-th generators. and are calculated via Eq. (B3).
(a). Steady state during synchronous operation. Each magenta dot represents the coordinate of the i-th meta-generator . The cyan line has a length equal to the generator’s voltage . The angle of rotation rate (ARR) of this line is defined by the generator’s rotation rate, which is calculated as . Here, is the normalized rotation rate, where is the actual value and is the power system base frequency. When all the generators are synchronized, the case is characterized by .
(b). State during asynchronous operation. The length of the orange dotted line between the magenta square dots represents the magnitude of , and the length of the solid blue line between the cyan dots represents the magnitude of . When the generator frequencies differ, the case is characterized by .
The algebraic and geometric models of the voltage phasor diagram, which plays a critical role in power system analysis, provided inspiration for the expressions of and . The expressions for and are analogous to those of , which represents the rate of energy dissipation between the nodes in a power system.
and
[see Fig. B1(b)]. represents the impedance between the Kth and the Lth generators. The difference between and in a physical sense is that the ARR of is defined by the frequency , whereas the angle of represents the phase angle.
The expressions of and indicate that they are related to the network because information about the network is contained in (e.g., the adjacency matrix and system parameters). However, for any two generators K and L, is the same in the expressions of and . eliminates . Therefore, the boundary equation is independent of disturbances, network topology, and system parameters. Although these factors collectively determine the system’s dynamic trajectory and generator operating points, the mathematical form and geometrical shape of the stability boundary itself remain invariant. Combining Eqs. (B1) and (B2), it is observed that . The set of points for which is the synchronous stability boundary.
As shown in Fig. B1(b),
The symbols “∆” and ““ are for distinction only and have no mathematical significance. Thus, the boundary equation is obtained via derivation from . The only variables in the boundary equation are and . These physical quantities are all representations of individual behavior.
is the stability boundary equation. When , the system is stable. When , the system is unstable. Geometrically, describes exactly curved surfaces that, together with , and enclose a stable domain.
The boundary equation
where . This is Eq. (1) in the main text.
The coordinate system is established, and the boundary is visualized (Figure 1(a)).
It should be noted that this boundary equation originated from physical intuition and the analysis of simulation data. We observed from the data that the quantity defined by Eq. (B3), where , precisely determines power system stability. This regularity suggested that it could be incorporated into the established physical consensus that “synchronization is determined by a balance between the suppression and the dissimilarity.” Based on this insight, we developed a theoretical framework for and . The construction of this framework yields an immediate theoretical consequence: the parameter , which contains network information, is naturally eliminated under the condition , which is equivalent to . Consequently, the framework presented in this paper not only unifies empirical observations with physical principles but also reveals the profound property that the stability boundary is independent of the network.
Appendix C: The boundary equation without
As mentioned in the derivation above, , where represents the power system base frequency and denotes the actual value. is constrained to positive real numbers. For a power system, the base frequency generally coincides with the rated frequency of the system(50 Hz or 60 Hz in most power grids globally). As previously stated in this paper, . is used extensively in power system analysis. However, to some extent, the selection of remains “anthropic selective”. Additionally, may be unknown before synchronization emerges. Can be eliminated from the boundary equation (i.e., is there a synchronization stability boundary independent of for power systems)?
When is substituted into Eq. (1),
Considering and ,
By setting , Eq. (C2) becomes . Therefore,
For real-world systems, both and must be real numbers. This fact provides the basis for proving the boundary equation (see appendix D). There is a constraint that . Therefore, the power system is synchronously stable when
In Eq. (C4), Condition , which is derived from Constraint and is ultimately driven by the requirement of .
is the stability boundary without . When , any value chosen for satisfies Eq. (C4). is exactly the left side of Eq. (1). When , Eq. (C5) is equivalent to the right side of Eq. (1). Eq. (1) and Eq. (C5) are equivalent [see appendix E]. This boundary equation is still determined by the behavior of individuals in the system and is independent of the network.
A comparison of Eq. (1) indicates that Eq. (C5) has a larger range of applicability because Eq. (1) requires prior knowledge of the value of . However, for convenience, this paper still uses Eq. (1) for visualization, as shown in Figure 1(a).
This boundary equation originates from physical intuition and analogy. Its rigor was subsequently established through experimental validation and mathematical proofs. The experimental validation results are provided in Figures 1, 2, S2, S3(b) and S5, among others.
Appendix D: Proof of the boundary equation
We prove that Eqs. (1) and (C5) describe the stability boundary. The proof proceeds as follows:
The proof proceeds in two steps. First, we prove that Eq. (C5) represents the boundary. We then prove that Eq. (1) is equivalent to Eq. (C5). Therefore, Eq. (1) is also shown to represent the boundary.
Definitions:
A Domain: Variables are , with . represents the frequency of the generator.
B Domain: Variables are . are the two roots of a quadratic equation . represents the common frequency of the power system. The quadratic equation originates from an independent consensus: Synchronization emerges when the suppression dominates dissimilarity.
There exists a pair of invertible algebraic maps, (see Eq. C3) and , that establish complete equivalence between the two domains: Let .
Forward Map ,
Inverse Map ,
The Principle of Real Numbers: The value of the common frequency must be a real number. This stems from an uncontested consensus: For each generator, the measured frequency value must be a real number. Since the common frequency emerges from these individual frequencies, it must consequently be real.
Proof:
The maps and establish one-to-one correspondence between the A domain and the B domain within their domains of definition. Thus, the two systems are algebraically equivalent. The analysis of the A domain can be transformed entirely equivalently into the analysis of the B domain.
Define the discriminant:.
From the expressions of map , and are real if and only if , i.e., . If , are complex numbers.
In according with the principle of real numbers, the common frequency must be a real number. are two solutions to . This strictly requires that both and must be true. This requirement defines a boundary for the physically admissible region in domain B. The boundary is described by . Therefore, all physically realizable states must and can only lie within the region satisfying (Physically Admissible Domain).
On the basis of the principle of real numbers and the equivalence of the A and B domains, we can rigorously define the existence limit of synchronization:
Admissible domain: Regions in the A domain that are equivalent to those in the B domain where .
Boundary: Regions in the A domain that are equivalent to those in the B domain where .
Forbidden domain: Regions in the A domain that are equivalent to those in the B domain where . The system state cannot remain stable.
Thus, the equation is as follows:
strictly delineates the physically achievable region from the physically unachievable region. It constitutes the admissible boundary of the system. This is precisely Eq. (C5), which is equivalent to Eq. (1) (when is true). Therefore, Eq. (1) is also proven to be the stability boundary.
Explanation:
In fact, the equivalence between the synchronously admissible boundary and the mathematical description of the principle of real numbers is shown here. Eq. (C5) is precisely the mathematical expression of that principle. The boundary of the physically admissible domain defines the existence of system states and thus carries more profound implications. Logically, physical admissibility is the cornerstone for discussing stability: A state must physically exist before its stability can be discussed. Our work not only established this boundary but also revealed its remarkable independence from the network.
In this paper, the physically admissible region is interpreted as the stability region. Although the admissible boundary and the stability boundary are not conceptually identical, their equivalence in the context of power systems does not compromise the rigor of this paper for the following reasons:
1, Stability refers to a system’s ability to return to an equilibrium state after being subjected to a disturbance. As detailed in the “experimental steps” section, a disturbance (fault) is applied to a synchronized power system at an engineering-acceptable step size ( s) until the generator system loses synchronization. This demonstrates that the experimental design aligns with the concept of stability. This experimental design also indicates that even if the two boundaries do not perfectly coincide, their discrepancy falls within the acceptable resolution for power systems.
2, All the experimental results demonstrate the successful application of the boundary to synchronization issues, including stability assessment and the multiswing stability for multiple generators. In experiments with different network topologies and disturbance scenarios, the observed stability discrimination results precisely matches the simulation experiments (refer to Figures 1, 2 and S5).
This study reveals that the synchronization stability boundaries are constrained by the principle of real numbers. Here, the direct contribution of this mathematical proof lies in enabling us to understand a counterintuitive conclusion: the synchronous stability boundary is independent of any particular network. More profoundly, the boundary equation is directly grounded in fundamental principles of physics, thereby transcending specific network structures.
Appendix E: Proof of Equivalence Between Eqs. (1) and (C5)
Proof:
Eq. (1) transforms equivalently to Eq. (C2): The derivation from Eq. (1) to Eq. (C2) is presented in “The boundary equation without ”. According to this derivation process, when , Eq. (1) is clearly equivalent to Eq. (C2).
Eq. (C5) transforms equivalently to Eq. (C2): Eq. (C5) becomes . Expanding the right-hand side of the above equation yields , which is expressed as . Let , then . When , that is , denote by [when the system is stable, is true (see Table K1 and other data in “Data availability”)]. The right-hand side of the above equation coincides with the right-hand side of Eq. (C2), hence . Eq. (C5) is equivalent to Eq. (C2).
Both Eqs. (1) and (C5) are both equivalent to Eq. (C2). Therefore, when , and , Eq. (1) and Eq. (C5) are equivalent.
Appendix F: Proof that Eq. (S2) does not alter the stability criterion of the system
The section on “Stability Boundary” employs meta-generators to validate the boundary equation. This raises a critical question: could the transformation from a generator to a meta-generator introduce erroneous results that invalidate the verification? In other words, regarding the criterion for synchronous stability, are the two models equivalent before and after the application of Eq. (S2)?
Definitions:
Definition 1: All analyses are conducted within any fixed time window . During this time window, define as the total duration of periods where , and conversely, define as the total duration of periods where . Then, and . represents the instantaneous values of the ARR of ith generator.
Definition 2 (the stability of the generator system): The difference in the ARR of generator is defined as . For , the stability criterion is and the system is stable if and only if .
Definition 3 (the stability of the meta-generator system): According to Eq. (S2) and Definition 1, the ARRs of the meta-generator are defined as (the ith meta-generator) and (the jth meta-generator). Their difference is . The stability criterion uses the same as definition 2 does. The system is stable if and only if .
Proof:
From the definitions above, it is directly derived that: . According to Eq. (S2), . We assume that within the time window, holds most of the time, implying that . For any two generators, and can always be selected. Therefore, this assumption does not lose generality and is always reasonable.
Theorem (stability assessment equivalence): Under the framework of Definitions 1–3, the generator system is synchronously stable if and only if the meta-generator system is synchronously stable.
The proof is completed by demonstrating the following two corollaries.
Corollary 1 (preservation of stability): If the generator system is stable (), then the meta-generator system is stable ().
Proof: From and the fact that implies , it follows that . Therefore, the meta-generator system is stable.
Corollary 2 (preservation of instability): If the generator system is unstable (), then the meta-generator system is unstable ().
Proof: The instability of the generator system () physically corresponds to a significant difference in the frequencies of the two generators, i.e., a loss of synchronization. This loss of synchronization implies that the state of one generator is persistently greater than that of the other for the vast majority of the observation window, indicating that the parameter . Substituting into the core identity yields [refer to Figures 1(f), 2(e), S5(c), (f) and (l)]. Therefore, , and the meta-generator system is unstable.
The two systems are equivalent in stability assessment; that is, Eq. (S2) does not change the stability discrimination of the system. The proof applies to a two-generator system.
Definitions:
Depending on the fault and network conditions, a multigenerator system may form completely different synchronous clusters upon instability, which greatly complicates the analysis of its synchronous stability.
We now prove that the generator system and the meta-generator system retain the same stability even when extended to multiple generators.
Definition 4 (the matrix): In the case of multiple generators, in Definition 1 is replaced by the matrix . There is
The matrix satisfies all . For any i: and .
Definition 5 (the stability of the multigenerator system): The power system comprises n generators, which form the set . For , the stability criterion is . The system is synchronously stable if and only if for any subset , holds. For a power system with n generators, there are subsets.
Definition 6 (the stability of the n meta-generator system): By definition, there are also n meta-generators. These meta-generators form an ordered set, . Adjacent meta-generators are defined as ordered subsets within this set. L=K+1. The stability criterion uses the same as definition 5 does. The meta-generator system is stable if and only if all adjacent meta-generators are stable, i.e., . There are (n-1) ordered sets of .
Proof:
Theorem (stability assessment equivalence): The multigenerator system is synchronously stable if and only if the n meta-generator system is synchronously stable.
The proof is completed by demonstrating the following two corollaries.
Corollary 1 (preservation of stability): If the multigenerator system is stable, then the n meta-generator system is stable.
Proof: For any two generators , holds when the system is stable. That is, . Let ; then, .
For the ith and i+1th meta-generators, and . Therefore, . Let ; then, . Let , where and . Substitute: .
Let , . From , we obtain , where . Then and . so that .
For the vectors and , . Thus . Therefore . According to the Definition 6, the meta-generator system is stable.
Corollary 2 (preservation of instability): If the multigenerator system is unstable, then the meta-generator system is unstable.
Proof: According to definition 5, the multigenerator system instability indicates that at least one generator has lost stability relative to all the other generators, i.e., for all : . In this scenario, the frequency of is significantly faster or slower than that of the remaining generators. Without loss of generality, we assume that this generator runs faster than the others do. By definition of the mate-generator, the natural consequence of this assumption is that is directly defined as the mate-generator and (). It follows that: for all .
For , , since , and the row sum is 1: . Given for all , , while .
since and , it follows that . The adjacent meta-generators are out of synchronization. According to definition 6, the meta-generator system is unstable.
The proof applies to a two-generator system when n=2. For the scenarios of a two-generator system and a multigenerator system, the meta-generator system and the generator system are equivalent in terms of synchronous stability assessment. Therefore, for any specific stability analysis tool and stability criterion, we can study the synchronous stability of the original generator system through the meta-generator system.
Explanation:
From the proof, the following conclusions can be derived:
1. The subsets in the generator system are reduced to just ordered sets in the meta-generator system. This result significantly simplifies the analysis of synchronous stability. This equivalence decomposes and transforms the stability problem of high-order complex systems into a series of easily analyzable problems.
2. When the generator system becomes unstable, we can directly identify the out-of-step generator through the matrix.
3. This equivalence provides the basis for utilizing the meta-generator system to verify the validity of the synchronous stability boundary. Moreover, the results demonstrate that the synchronous stability boundary of high-order complex systems is also independent of the network.
4. This reduction algorithm is solely defined by the frequency value and is agnostic to any specific discipline. Consequently, it can be directly applied to a broader range of fields.
2. Materials and Methods
Simulation experiment and software
The swing equation can be used to analyze the synchronization of the generators and is presented as follows:
where represents the synchronous speed of the system, denotes the inertia constant, indicates a damping coefficient, and the strength of the interactions and represents the power angle. represents the mechanical power, and represents the electrical power of the ith generator. The swing equation is the power system equivalent of the Kuramoto model [1,2]:
(: The damping of an oscillator; : The inertia constant and : A coupling matrix).
This paper employs the time-domain simulation results of the swing equation to verify the validity of Eq. (1). Therefore, to conveniently obtain more accurate calculation results, each of the two test systems was simulated separately in this paper via the Power System Analysis Software Package[42] (PSASP 7.0), a simulation software. Standard power flow calculations and transient stability calculations were performed in the above network models via this software. Time series data of the response of the generator to network faults in the free state are collected. These data are mapped from generators to meta-generators , and the results are visualized.
Experimental steps
To validate the boundary equation, we conducted simulation experiments following this general procedure: induce a line fault in a power grid model, compute the system’s dynamic response, and assess whether the boundary equation accurately discriminates between stable and unstable outcomes.
The detailed experimental steps are as follows. First, the network models for the test systems were constructed within the simulation software. The component and generator dynamic parameters were sourced from refs. 29 and 30. A standard power flow calculation was initially conducted to obtain the steady-state operating condition, which served as the foundational input for all subsequent dynamic simulations. The system frequency was set to a base value of 50 Hz. To observe the inherent system response without external control interventions, all the automated controls were disabled.
Prior to dynamic simulation, the fault scenario was defined. This included the fault location (e.g., Node 18 in the New England test system, as shown in Figure 1 and Figure 3), the fault type, and the fault clearing time . To investigate the synchronization stability under severe disturbances, all the faults in this study were set as three-phase short-circuits to ground. Such disturbances pronouncedly excite and unveil the inherent nonlinearities and uncertainties in the power system, shifting it from a normal, quasi-linear, and stable operating state into a highly nonlinear and even unstable dynamic regime. The dynamic simulation was then executed, and the rotation rate and terminal voltage of each generator were recorded over a time window of 20 seconds, starting from the fault inception. This extended time window was chosen specifically to capture multiswing stability phenomena.
To observe the disturbed trajectory, we turned off the controls. Prior to performing dynamic calculations, we established the fault location (e.g., node 18 in the New England test system, as shown in Figure 1 and Figure 3) and specified the fault type and the fault clearing time . To simulate the synchronization stability under large disturbances, all fault types discussed in this paper were set as a three-phase short circuit to ground. We calculated the rotation rate and port bus voltage of the ith generator for various fault clearing times . To test the effectiveness of the approach for the stability of multiple swings, the time window was set to 20 seconds. That is, using the start of the disturbance as a starting point, we calculated and recorded the generator data for the next 20 seconds. The fault location and type were held constant. The fault clearing time was then systematically increasing step length , and the simulation process was repeated until the system transitioned from a stable state to a loss of synchronization state, as confirmed by the simulation results (e.g., Figures 1(e) and 2(d)).
High-order interactions transform into pairwise interactions
The angle of rotation rate of the ith generator was subsequently calculated as . The extensive interconnections between generators make stability analysis very challenging (see Figure S2). This challenge is also attributed to the complexity of the network. In essence the connection between generators involves higher-order interactions, as each generator is influenced by more than one other generator within the system. To address these challenges, the concept of a meta-generator is introduced. At moment t, the instantaneous values of the n generator system are arranged in descending order by , relabeled, and then reconstituted as the n meta-generator system . In other words, when the condition is true, we relabel the serial number of the generator at that moment:
A meta-generator is created by reordering and labeling generators. Note that for the meta-generator, in the subsequent equations of this paper [such as Eq. (1)], L = K + 1. This transformation has been shown not to change the stability of the system [see appendix F] and the dynamic trends of the generators [compare the results in Figures 3(b) and S3(a)].
On the other hand, the meta-generator, defined by Eq. (S2), is the product of a stability-preserving reduction that transforms the system’s high-order dynamics into a sequence of pairwise interactions (L = K + 1). This formulation allows the synchronization stability of the entire system to be analyzed through the collective state of its constituent meta-generator pairs via the unified boundary of Eq. (1).
In this manner, we obtain the meta-generator data . Before and after the transformation, the numbers of generators and meta-generators are equal. Except Figures S2 and S3, all results and discussions in this paper are based on the meta-generator.
Data Calculation
The polar coordinates of the ith meta-generator are denoted by () [see Fig. B1]. The 3D coordinate point formed by the Kth and Lth meta-generators is denoted by () [see Figure 1]. These points are calculated as follows:
The means of over were
and
The results are shown in Figures 1(b), 3(b), S1(a), etc.
The means of over were
where represents the time interval. The results are shown in Figures 1(c) and 2(b).
The standard deviation of is calculated as follows:
where represents the expectation of . The results are shown in Figs. 3(a), S1(a) and S4.
Figure S1.
Spontaneous synchronization independent of the network (meta-generator in the 3-gen). The horizontal axis represents the fault clearing time. The fault clearing time increases from 0.227 s to 0.245 s. A three-phase short circuit to a ground fault occurs at the 4-node. . (a). Spontaneous synchronization of meta-generators in the 3-gen. The horizontal axis represents the fault clearing time. The vertical axis represents the standard deviation of . Here, denotes the standard deviation of , which begins to decrease at (magenta dots) and increases by 2200% at (cyan star) when the system becomes unstable (cyan pentagram dots). can be calculated via Eq. (S6). (b). Another manifestation of spontaneous synchronization. The slope changes from greater than 1 (cyan stars) to less than 1 (magenta diamonds), and changes from positive to negative. is calculated with the following equation: . The moment of is close to 0.227 s.
Figure S1.
Spontaneous synchronization independent of the network (meta-generator in the 3-gen). The horizontal axis represents the fault clearing time. The fault clearing time increases from 0.227 s to 0.245 s. A three-phase short circuit to a ground fault occurs at the 4-node. . (a). Spontaneous synchronization of meta-generators in the 3-gen. The horizontal axis represents the fault clearing time. The vertical axis represents the standard deviation of . Here, denotes the standard deviation of , which begins to decrease at (magenta dots) and increases by 2200% at (cyan star) when the system becomes unstable (cyan pentagram dots). can be calculated via Eq. (S6). (b). Another manifestation of spontaneous synchronization. The slope changes from greater than 1 (cyan stars) to less than 1 (magenta diamonds), and changes from positive to negative. is calculated with the following equation: . The moment of is close to 0.227 s.
(c). decreases as increases. The magenta line indicates , and the cyan line indicates . In both cases, a significant decrease in the tail is observed; that is, both and are less than 0 after 
As shown in Figure 3(a), the spontaneous synchronization near the boundary is shown in Figure S1(a). Owing to the monotonicity of with respect to , i.e., . . As shown in Figure S1(b), , then (the results in Figure S1(c) also provide direct evidence). These findings suggest that the Kth and Lth meta-generators are evolving toward synchronization. Unlike Figure 3(b), this result is another manifestation of spontaneous synchronization. These results reveal the complexity of spontaneous synchronization.
Figure S2.
“Synchronization stability” loses transferability between generators (in the 10-gen) and the necessity of Eq. (S2). The fault is a three-phase short-circuit ground fault. The disturbed trajectory starts from planes . increases as the fault clearing time increases. Note that the time series data of the generator are used here. (a). When failure occurs at node 12, the trajectories of , and . . The system is stable at 0.285 s (cyan dots) but unstable at 0.286 s (magenta dots). The trajectory of (orange solid line) moves closer to and eventually crosses the boundary, but the trajectories of (black dashed line) and (black solid line) are in the stable domain and move away from the boundary. (b). When the failure occurs at node 18, the trajectories of , and . . The system is stable at 0.154 s (cyan dots) but unstable at 0.155 s (magenta dots). The trajectory of (orange solid line) moves closer to and eventually crosses the boundary, but the trajectories of (black dashed line) and (black dashed line) are in the stable domain and move away from the boundary.
Figure S2.
“Synchronization stability” loses transferability between generators (in the 10-gen) and the necessity of Eq. (S2). The fault is a three-phase short-circuit ground fault. The disturbed trajectory starts from planes . increases as the fault clearing time increases. Note that the time series data of the generator are used here. (a). When failure occurs at node 12, the trajectories of , and . . The system is stable at 0.285 s (cyan dots) but unstable at 0.286 s (magenta dots). The trajectory of (orange solid line) moves closer to and eventually crosses the boundary, but the trajectories of (black dashed line) and (black solid line) are in the stable domain and move away from the boundary. (b). When the failure occurs at node 18, the trajectories of , and . . The system is stable at 0.154 s (cyan dots) but unstable at 0.155 s (magenta dots). The trajectory of (orange solid line) moves closer to and eventually crosses the boundary, but the trajectories of (black dashed line) and (black dashed line) are in the stable domain and move away from the boundary.
The numbers 30 and 39 indicate that the two generators are connected to nodes 30 and 39, respectively, in the 10-gen test system. “38” also applies this convention. A comparison of the results in Figure S2 and Table S1 reveals that the boundary can also determine the synchronous stability of the system. These results reveal the validity of the synchronous stability boundary. However, compared with meta-generator models, generator models have the following drawbacks:
1. and are difficult to define. For a system with n generators, perturbed trajectories must be examined. This increases computational costs.
2. When , generators 30 and 38 are synchronized, and generators 38 and 39 are synchronized, but generators 30 and 39 are not synchronized as shown in Figure S2(a). Similar conclusions are shown in Figure S2(b). These results are clearly illogical.
The examples in Figure S2 reveal that for a generator system, “stabilization” occurs for the entire system, and determining which generator is out of step is challenging. “Synchronization stability” results in a loss of transferability between generators. This is the primary challenge facing generator systems in large-scale networks. This difficulty stems from the fact that the couplings between generators involve higher-order interactions rather than simple pairwise interactions, as each generator is affected by multiple other generators within the same system. Therefore, the generator system cannot directly provide information about subsystem levels such as coherent groups. Therefore, the introduction of the meta-generator concept is crucial for analysis.
Figure S3.
Self-organization behavior of generators near the boundary (generators in the 10-gen).
Three-phase short-circuit ground fault at the 18-node. increases from 0.140 s to 0.154 s. . The black arrow indicates the direction in which increased. Note that the time series data of the generator are used here.
(a). Phenomenon of the potential barrier on plane ( the generator). As shown in Figure 3(b), from 0.147 s (the magenta dots) onward, the distance between neighboring points decreased in the direction of the black arrow (shaded area). The points are calculated via Eq. (S3).
(b). Position of the thin layer where spontaneous synchronization occurs in the 3D coordinate system . The bottom of the gray shaded area indicates the boundary. At , reaches the boundary. Within the range from 0.147 s to 0.154 s, remains within the thin layer (gray shaded area), which coincides precisely with the period during which spontaneous synchronization emerges.
The potential barrier of the generator is similar to that of the meta-generator, as shown in Figure 3(b); that is, the barrier of the generator is the same as that of the meta-generator. The existence of a metastable region formed by spontaneous synchronization close to the boundary is shown in Figure S3(b). When the system operates in this region, spontaneous synchronization occurs, delaying system destabilization. This provides an additional layer of protection for the stability of the power system.
Figure S4.
Spontaneous synchronization always occurs when the system becomes unstable. (Meta-generator in the 10-gen test system). A three-phase short-circuit ground fault is set at the corresponding node. The black arrow indicates the direction in which increased.
Figure S4.
Spontaneous synchronization always occurs when the system becomes unstable. (Meta-generator in the 10-gen test system). A three-phase short-circuit ground fault is set at the corresponding node. The black arrow indicates the direction in which increased.
(a)–(e). Spontaneous synchronization phenomena under different fault conditions. As in Figure 3(a), the horizontal axis represents the fault clearing time. The vertical axis represents the standard deviation of . The phenomenon of decreasing occurs only near the point of instability. The faults are at nodes 6, 12, 24, 30 and 36. No regular pattern is observed for the distribution of the positions of these nodes in the network. was calculated via Eq. (S6). These repeated results indicate that this novel phenomenon of spontaneous synchronization is not accidental.
(f) and (g). Phenomenon of the potential barrier on plane (the faults at the 6-node (0.114 s~0.124 s) in (f) and 24-node (0.126 s~0.135 s) in (g)).The points crossed the potential barrier (shaded area). The points are calculated via Eq. (S3).
Similar to Figure 3, the results reveal that significantly decreases where the system is about to become unstable, and a “potential barrier” appears in some cases. These results indicate a strong correlation between the synchronization stability boundary and spontaneous synchronization.
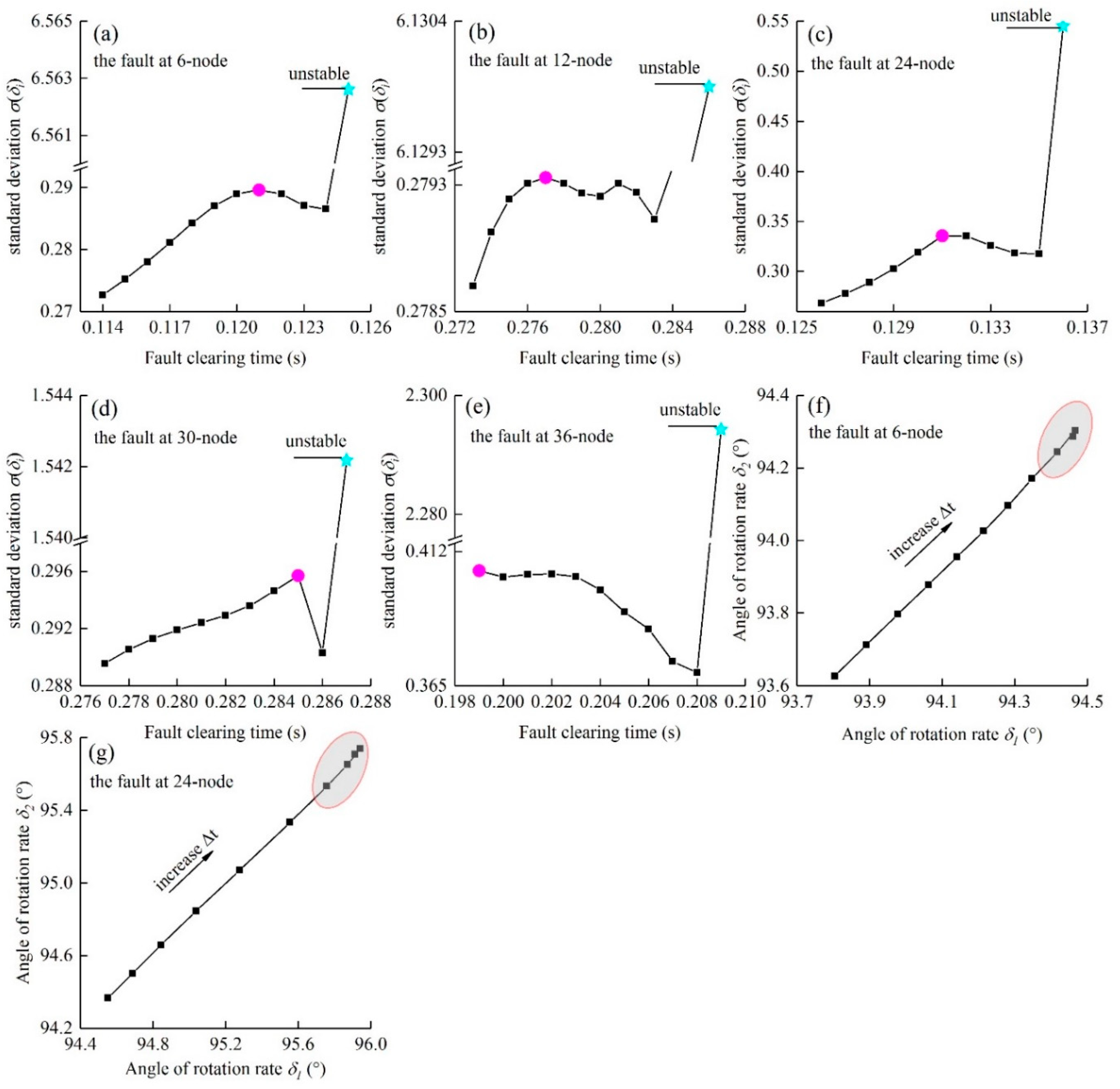
Figure S5.
Further evidence regarding the validity of Eq. (1). (meta-generators in the 10-gen).
A New England test system was used. A three-phase short-circuit ground fault is set at the corresponding node. The faults are located at nodes 6 (a–c), 24 (d–f), and 36 (g–i). . The blue surface in panels (a), (d), and (g) is the synchronization stability boundary described by Eq. (1). Panel (a) shows the positions of when (cyan) and (magenta). Panels (b) and (c) are the simulation results of (magenta line) and (cyan line) for cases and , respectively. The panels in the other rows use a similar correspondence.
| Table S1. Validity of the stability boundary. (meta-generators in the 10-gen) | ||||||||||||
| BUS No. | ∆t (s) | stability | δ1 (°) | U1 (p.u.) | δ2 (°) | U2 (p.u.) | δ3 (°) | U3 (p.u.) | δ4 (°) | U4 (p.u.) | δ5 (°) | U5 (p.u.) |
| 1BUS | 0.410 | 1 | 95.11555411 | 0.972148631 | 94.92885679 | 0.973716987 | 94.81681981 | 0.97448043 | 94.727995 | 0.971945477 | 94.65814985 | 0.974931179 |
| 0.411 | 0 | 116.2838975 | 0.787539945 | 95.17936924 | 0.945323128 | 95.02558851 | 0.952272919 | 94.93012487 | 0.951782769 | 94.85370453 | 0.960884043 | |
| 2BUS | 0.169 | 1 | 96.04069551 | 0.960258826 | 95.8785429 | 0.965856947 | 95.77207434 | 0.958046877 | 95.69266479 | 0.957502269 | 95.62255917 | 0.964113913 |
| 0.170 | 0 | 107.8380972 | 0.736833073 | 106.4727572 | 0.782240045 | 105.9099072 | 0.761523438 | 105.5710704 | 0.77734927 | 103.4279355 | 0.879271019 | |
| 3BUS | 0.155 | 1 | 95.93970595 | 0.962107621 | 95.77882717 | 0.962144193 | 95.68308109 | 0.95929918 | 95.61034772 | 0.963636157 | 95.54300897 | 0.964995462 |
| 0.156 | 0 | 115.1120065 | 0.708101864 | 106.0805204 | 0.8763196 | 105.915216 | 0.895178931 | 105.798553 | 0.903385962 | 105.7174657 | 0.917328581 | |
| 4BUS | 0.144 | 1 | 95.49943802 | 0.963207476 | 95.33631336 | 0.96354949 | 95.22257344 | 0.973346457 | 95.13473041 | 0.974280975 | 95.05640969 | 0.97051974 |
| 0.145 | 0 | 113.7028178 | 0.717026117 | 106.2733036 | 0.872775282 | 106.0989124 | 0.879218006 | 105.9890866 | 0.90616004 | 105.9052054 | 0.918249115 | |
| 5BUS | 0.128 | 1 | 94.52320443 | 0.969090585 | 94.36701698 | 0.976674953 | 94.24864075 | 0.987336377 | 94.15638351 | 0.987375677 | 94.07229309 | 0.994060865 |
| 0.129 | 0 | 115.9831999 | 0.773989975 | 94.52959525 | 0.964788781 | 94.40928277 | 0.97531902 | 94.32941425 | 0.972376952 | 94.26325248 | 0.973208376 | |
| 6BUS | 0.124 | 1 | 94.46098178 | 0.973053278 | 94.28678393 | 0.977291604 | 94.16608912 | 0.992088171 | 94.08132732 | 0.988349925 | 94.00230227 | 0.988741399 |
| 0.125 | 0 | 116.3065577 | 0.758977216 | 96.10567456 | 0.933971214 | 95.95487764 | 0.947303483 | 95.84717312 | 0.951647661 | 95.74990573 | 0.955337441 | |
| 7BUS | 0.148 | 1 | 94.42207976 | 0.972385172 | 94.25139816 | 0.978490575 | 94.12735511 | 0.991819425 | 94.04416404 | 0.990110255 | 93.96456484 | 0.991832264 |
| 0.149 | 0 | 116.0029089 | 0.775363888 | 94.47784506 | 0.963737171 | 94.35502368 | 0.973952579 | 94.27228721 | 0.972884263 | 94.20339521 | 0.978896372 | |
| 8BUS | 0.146 | 1 | 94.45665354 | 0.973155312 | 94.28350283 | 0.976244833 | 94.16013147 | 0.992475927 | 94.07595345 | 0.989382604 | 94.00092242 | 0.989227246 |
| 0.147 | 0 | 116.2077842 | 0.758953048 | 95.2643495 | 0.931248586 | 95.0706542 | 0.952026682 | 94.96194403 | 0.950911379 | 94.87450075 | 0.958051534 | |
| 9BUS | 0.305 | 1 | 95.03771918 | 0.964372529 | 94.84728485 | 0.966554948 | 94.72809603 | 0.981846217 | 94.63468125 | 0.979325052 | 94.55206921 | 0.985364243 |
| 0.306 | 0 | 115.6459655 | 0.767382344 | 95.27456994 | 0.94403028 | 95.11519555 | 0.955202859 | 95.02661015 | 0.962191709 | 94.95649674 | 0.968149985 | |
| 10BUS | 0.136 | 1 | 94.5195023 | 0.970495937 | 94.37067529 | 0.977765182 | 94.25033802 | 0.985164963 | 94.15875226 | 0.989552314 | 94.07188875 | 0.990737136 |
| 0.137 | 0 | 116.2008942 | 0.768276577 | 95.21773162 | 0.938303193 | 94.96491263 | 0.957196997 | 94.86989747 | 0.957897196 | 94.79466108 | 0.961815182 | |
| Table S1. Validity of the stability boundary. (meta-generators in the 10-gen)(Continued) | ||||||||||||
| BUS No. | ∆t (s) | stability | δ6 (°) | U6 (p.u.) | δ7 (°) | U7 (p.u.) | δ8 (°) | U8 (p.u.) | δ9 (°) | U9 (p.u.) | δ10 (°) | U10 (p.u.) |
| 1BUS | 0.410 | 1 | 94.58897196 | 0.972295872 | 94.51125334 | 0.971868301 | 94.42488824 | 0.974795712 | 94.31465581 | 0.977211419 | 94.12484002 | 0.978123283 |
| 0.411 | 0 | 94.77924106 | 0.954117956 | 94.70375693 | 0.954536142 | 94.61362516 | 0.957671354 | 94.51410122 | 0.952261589 | 94.33451457 | 0.947971714 | |
| 2BUS | 0.169 | 1 | 95.55292096 | 0.962245282 | 95.47497555 | 0.959441144 | 95.39775964 | 0.958754533 | 95.2967245 | 0.960566357 | 95.12690353 | 0.970588966 |
| 0.170 | 0 | 103.3095171 | 0.88109082 | 103.2085339 | 0.879340215 | 103.0839553 | 0.879275567 | 97.89209347 | 0.795840125 | 95.25021024 | 0.928024693 | |
| 3BUS | 0.155 | 1 | 95.47018166 | 0.965264823 | 95.3988683 | 0.963680475 | 95.31708048 | 0.960043928 | 95.22812941 | 0.961394008 | 95.06693926 | 0.969893173 |
| 0.156 | 0 | 105.634039 | 0.913361174 | 105.5516243 | 0.9025301 | 105.4342427 | 0.889150385 | 105.264469 | 0.881717211 | 93.31246926 | 0.927812484 | |
| 4BUS | 0.144 | 1 | 94.98392762 | 0.973201764 | 94.9080898 | 0.970926942 | 94.82563258 | 0.970691159 | 94.71308068 | 0.965893783 | 94.53777855 | 0.968922304 |
| 0.145 | 0 | 105.8268355 | 0.92232027 | 105.7340101 | 0.907327001 | 105.6071671 | 0.886331099 | 105.4256159 | 0.874409845 | 93.17204604 | 0.922775862 | |
| 5BUS | 0.128 | 1 | 94.00232942 | 0.992500805 | 93.92470002 | 0.989645432 | 93.84058111 | 0.986944218 | 93.72654228 | 0.976143033 | 93.54628773 | 0.97086086 |
| 0.129 | 0 | 94.20036381 | 0.973173543 | 94.13193367 | 0.972998291 | 94.05701325 | 0.970208036 | 93.9734825 | 0.966111754 | 93.82283555 | 0.965166797 | |
| 6BUS | 0.124 | 1 | 93.92826781 | 0.992369735 | 93.85186196 | 0.991731929 | 93.76457256 | 0.987084713 | 93.64887027 | 0.982844813 | 93.45341582 | 0.972683283 |
| 0.125 | 0 | 95.65910634 | 0.957254643 | 95.56042037 | 0.955578781 | 95.46098343 | 0.951118361 | 95.34350183 | 0.945809655 | 95.15941882 | 0.935662344 | |
| 7BUS | 0.148 | 1 | 93.89373903 | 0.992862219 | 93.81787571 | 0.99147987 | 93.73204894 | 0.988722604 | 93.61496323 | 0.981773913 | 93.42125823 | 0.972857001 |
| 0.149 | 0 | 94.13820919 | 0.972108976 | 94.06790908 | 0.971848091 | 93.99017277 | 0.97262992 | 93.89859153 | 0.96725942 | 93.75018536 | 0.963524413 | |
| 8BUS | 0.146 | 1 | 93.92897149 | 0.993836647 | 93.85403504 | 0.99179094 | 93.76831654 | 0.986358206 | 93.65108192 | 0.983137821 | 93.4546903 | 0.972279145 |
| 0.147 | 0 | 94.79168369 | 0.95650035 | 94.70229692 | 0.956857611 | 94.60167517 | 0.950034498 | 94.46002579 | 0.949436587 | 94.29790546 | 0.948553518 | |
| 9BUS | 0.305 | 1 | 94.48438445 | 0.984754288 | 94.40056555 | 0.983783148 | 94.31180458 | 0.978517426 | 94.19481873 | 0.971449055 | 93.99298818 | 0.966232659 |
| 0.306 | 0 | 94.89276862 | 0.967781289 | 94.82059898 | 0.966952399 | 94.74695815 | 0.957083563 | 94.64727107 | 0.950980845 | 94.48254016 | 0.949593013 | |
| 10BUS | 0.136 | 1 | 93.99883525 | 0.988542709 | 93.92137581 | 0.990257546 | 93.83261457 | 0.98661036 | 93.71775434 | 0.978940815 | 93.54182877 | 0.972722829 |
| 0.137 | 0 | 94.71954893 | 0.9620201 | 94.6398427 | 0.964243018 | 94.55625657 | 0.959562469 | 94.44905057 | 0.955244708 | 94.29771996 | 0.9514295 | |
| Table S1. Validity of the stability boundary. (meta-generators in the 10-gen)(Continued) | ||||||||||||
| BUS No. | ∆t (s) | stability | δ1 (°) | U1 (p.u.) | δ2 (°) | U2 (p.u.) | δ3 (°) | U3 (p.u.) | δ4 (°) | U4 (p.u.) | δ5 (°) | U5 (p.u.) |
| 11BUS | 0.137 | 1 | 94.39297825 | 0.976521574 | 94.24069015 | 0.976160485 | 94.1223366 | 0.992075892 | 94.03506233 | 0.987872719 | 93.95208443 | 0.990959525 |
| 0.138 | 0 | 116.2038337 | 0.775181689 | 94.75534661 | 0.954534603 | 94.62576975 | 0.966341554 | 94.53741295 | 0.969586307 | 94.4590329 | 0.974124493 | |
| 12BUS | 0.285 | 1 | 94.79704603 | 0.964415502 | 94.61552161 | 0.967584288 | 94.48506001 | 0.981840755 | 94.39871137 | 0.984355797 | 94.33038106 | 0.985486347 |
| 0.286 | 0 | 115.7537307 | 0.767055457 | 94.84804905 | 0.953396832 | 94.7024218 | 0.963960955 | 94.61761982 | 0.962234643 | 94.54997951 | 0.968173813 | |
| 13BUS | 0.147 | 1 | 95.14161021 | 0.962428056 | 94.97442425 | 0.966675047 | 94.85000053 | 0.972206482 | 94.75097414 | 0.975664063 | 94.6636762 | 0.97965037 |
| 0.148 | 0 | 115.8902599 | 0.752636832 | 95.59280453 | 0.941720435 | 95.44509413 | 0.953524448 | 95.35569179 | 0.957955082 | 95.27737599 | 0.964978996 | |
| 14BUS |
0.151 | 1 | 95.84027909 | 0.956784648 | 95.68377866 | 0.95459977 | 95.58121414 | 0.965912019 | 95.49071168 | 0.969755782 | 95.41157176 | 0.970283753 |
| 0.152 | 0 | 112.1283651 | 0.737896982 | 106.5057776 | 0.858001069 | 106.3469307 | 0.895004398 | 106.2517709 | 0.905817031 | 106.1707492 | 0.913470185 | |
| 15BUS |
0.15 | 1 | 95.80391394 | 0.976902524 | 95.60953968 | 0.970209335 | 95.50060742 | 0.965883753 | 95.41186483 | 0.964411309 | 95.33853591 | 0.961790545 |
| 0.151 | 0 | 116.0065047 | 0.751527466 | 111.1451259 | 0.861091474 | 110.9963451 | 0.870727091 | 110.8879872 | 0.884035847 | 110.7964457 | 0.873218761 | |
| 16BUS |
0.114 | 1 | 95.77556855 | 0.971176967 | 95.57273209 | 0.963935062 | 95.45212322 | 0.960723103 | 95.34726145 | 0.967982909 | 95.2674853 | 0.965222154 |
| 0.115 | 0 | 119.7205834 | 0.646441209 | 115.3611523 | 0.660710515 | 112.5744789 | 0.728580545 | 111.6551848 | 0.715872344 | 108.7017029 | 0.741367276 | |
| 17BUS |
0.13 | 1 | 95.77340536 | 0.973510845 | 95.58948735 | 0.966640235 | 95.47987381 | 0.965451939 | 95.39039774 | 0.967316372 | 95.3090596 | 0.966665792 |
| 0.131 | 0 | 123.5493475 | 0.674131769 | 115.2198059 | 0.790938411 | 112.152811 | 0.845266187 | 112.0231818 | 0.849906532 | 111.9040671 | 0.850024188 | |
| 18BUS | 0.154 | 1 | 95.8254409 | 0.97185966 | 95.65126882 | 0.96483996 | 95.55993959 | 0.965383203 | 95.47461509 | 0.96673025 | 95.39994378 | 0.96656084 |
| 0.155 | 0 | 120.3106286 | 0.665679725 | 107.3294936 | 0.893064573 | 107.202687 | 0.901250035 | 107.108259 | 0.899117211 | 107.025826 | 0.899906662 | |
| 19BUS | 0.129 | 1 | 95.22613477 | 0.961028851 | 95.01843163 | 0.964292744 | 94.87579602 | 0.973182194 | 94.77289721 | 0.979713093 | 94.69476717 | 0.980383243 |
| 0.13 | 0 | 108.5072056 | 0.809818406 | 95.17021439 | 0.950055172 | 95.01400819 | 0.962665232 | 94.90962203 | 0.962988556 | 94.81742606 | 0.977463358 | |
| 20BUS |
0.151 | 1 | 95.26215533 | 0.9625008 | 95.05199184 | 0.967287446 | 94.9367082 | 0.971256797 | 94.84735126 | 0.976987431 | 94.76783563 | 0.979706692 |
| 0.152 | 0 | 132.8093106 | 0.567889105 | 111.8978958 | 0.681239325 | 109.9364109 | 0.735196867 | 109.2970568 | 0.735997691 | 109.1125995 | 0.737416897 | |
| Table S1. Validity of the stability boundary. (meta-generators in the 10-gen)(Continued) | ||||||||||||
| BUS No. | ∆t (s) | stability | δ6 (°) | U6 (p.u.) | δ7 (°) | U7 (p.u.) | δ8 (°) | U8 (p.u.) | δ9 (°) | U9 (p.u.) | δ10 (°) | U10 (p.u.) |
| 11BUS | 0.137 | 1 | 93.8787395 | 0.990168641 | 93.80049044 | 0.992279335 | 93.71374446 | 0.985886062 | 93.59723121 | 0.983066502 | 93.42238086 | 0.977152139 |
| 0.138 | 0 | 94.38692128 | 0.974832024 | 94.30865135 | 0.970655982 | 94.22355351 | 0.967205057 | 94.12982433 | 0.964944553 | 93.98956338 | 0.95541089 | |
| 12BUS | 0.285 | 1 | 94.26544891 | 0.985303313 | 94.19216456 | 0.985162594 | 94.10972554 | 0.978638581 | 93.9861976 | 0.976276737 | 93.78756131 | 0.965482834 |
| 0.286 | 0 | 94.48794463 | 0.970924388 | 94.4230196 | 0.967004453 | 94.34625082 | 0.962531694 | 94.25192127 | 0.959071699 | 94.09294401 | 0.956754433 | |
| 13BUS | 0.147 | 1 | 94.58305747 | 0.979242454 | 94.49926693 | 0.976933368 | 94.40217157 | 0.973155827 | 94.28564351 | 0.971089635 | 94.10477482 | 0.969173138 |
| 0.148 | 0 | 95.20530796 | 0.960095317 | 95.13468721 | 0.962301634 | 95.04738198 | 0.955750775 | 94.95330968 | 0.945173588 | 94.78857197 | 0.946637461 | |
| 14BUS | 0.151 | 1 | 95.33804343 | 0.970074863 | 95.26559295 | 0.969533783 | 95.16942407 | 0.964822079 | 95.07633987 | 0.958568451 | 94.90739313 | 0.961662564 |
| 0.152 | 0 | 106.0912031 | 0.915871739 | 105.9989988 | 0.906138881 | 105.8977411 | 0.892013703 | 105.7257801 | 0.871913938 | 93.32689163 | 0.92308922 | |
| 15BUS | 0.15 | 1 | 95.27187963 | 0.961101179 | 95.20210686 | 0.965217886 | 95.12117672 | 0.966637241 | 95.00454523 | 0.971750685 | 94.80301651 | 0.984451659 |
| 0.151 | 0 | 110.7086025 | 0.867204778 | 110.6062907 | 0.876881364 | 110.4894933 | 0.873925112 | 110.318508 | 0.872769955 | 92.81647305 | 0.92150951 | |
| 16BUS | 0.114 | 1 | 95.18903562 | 0.962312244 | 95.1134542 | 0.964592944 | 95.01343122 | 0.962635202 | 94.88461145 | 0.969606862 | 94.67842721 | 0.982270965 |
| 0.115 | 0 | 108.0071161 | 0.821266077 | 107.8928651 | 0.81685912 | 107.7612071 | 0.813505687 | 106.5827932 | 0.782672584 | 94.78379451 | 0.919132629 | |
| 17BUS | 0.13 | 1 | 95.24201104 | 0.965654218 | 95.16714294 | 0.965292884 | 95.07679965 | 0.964502204 | 94.96508215 | 0.969626367 | 94.77086494 | 0.983478726 |
| 0.131 | 0 | 111.804953 | 0.850457711 | 111.7007481 | 0.853125092 | 111.5829741 | 0.853590995 | 111.4447301 | 0.853934638 | 92.03966964 | 0.922414548 | |
| 18BUS | 0.154 | 1 | 95.3309761 | 0.966505917 | 95.2544011 | 0.964055527 | 95.17570345 | 0.964709475 | 95.07576665 | 0.964711939 | 94.89580971 | 0.978851279 |
| 0.155 | 0 | 106.9540967 | 0.90576905 | 106.8749795 | 0.903488291 | 106.7840003 | 0.905033853 | 106.6578714 | 0.894109445 | 92.98320026 | 0.924357656 | |
| 19BUS | 0.129 | 1 | 94.62325432 | 0.983365017 | 94.54341707 | 0.977106632 | 94.43733677 | 0.971706532 | 94.29655792 | 0.970893898 | 94.07986622 | 0.972007076 |
| 0.13 | 0 | 94.74106263 | 0.974065037 | 94.66122043 | 0.971051229 | 94.55993025 | 0.965085347 | 94.4239523 | 0.962860325 | 94.22231491 | 0.959947741 | |
| 20BUS | 0.151 | 1 | 94.69985366 | 0.978241399 | 94.61921006 | 0.973334478 | 94.52754084 | 0.970361584 | 94.40749349 | 0.975976547 | 94.18920033 | 0.972822379 |
| 0.152 | 0 | 107.4999575 | 0.83100965 | 107.3405165 | 0.821181149 | 107.178335 | 0.82972905 | 99.50670949 | 0.760628566 | 95.19966297 | 0.912921279 | |
| Table S1. Validity of the stability boundary. (meta-generators in the 10-gen)(Continued) | ||||||||||||
| BUS No. | ∆t (s) | stability | δ1 (°) | U1 (p.u.) | δ2 (°) | U2 (p.u.) | δ3 (°) | U3 (p.u.) | δ4 (°) | U4 (p.u.) | δ5 (°) | U5 (p.u.) |
| 21BUS | 0.138 | 1 | 95.86925125 | 0.954335852 | 95.63852619 | 0.951556197 | 95.48940498 | 0.954757491 | 95.37744846 | 0.962131899 | 95.28555129 | 0.962494388 |
| 0.139 | 0 | 99.52239075 | 0.859408001 | 99.23606534 | 0.852861649 | 98.38964572 | 0.893207226 | 97.51808977 | 0.909902999 | 97.40840624 | 0.916455312 | |
| 22BUS | 0.129 | 1 | 95.31264584 | 0.970634608 | 95.05602724 | 0.96350946 | 94.91261868 | 0.968278761 | 94.81792111 | 0.969660645 | 94.73217752 | 0.974536597 |
| 0.130 | 0 | 119.5374327 | 0.716091229 | 108.265515 | 0.883086707 | 108.0997164 | 0.8922798 | 107.9828514 | 0.87914 | 107.8929075 | 0.876665867 | |
| 23BUS | 0.144 | 1 | 96.26891636 | 0.946089065 | 96.06009329 | 0.945849025 | 95.89098892 | 0.946768421 | 95.77479287 | 0.954263703 | 95.68794011 | 0.959713083 |
| 0.145 | 0 | 111.957676 | 0.783399045 | 96.56158609 | 0.936368271 | 96.40203425 | 0.939091479 | 96.278055 | 0.937704288 | 96.18659336 | 0.946762379 | |
| 24BUS | 0.135 | 1 | 95.91217872 | 0.971651424 | 95.70751385 | 0.96443052 | 95.59172207 | 0.957493363 | 95.48583266 | 0.961542454 | 95.40372946 | 0.962134808 |
| 0.136 | 0 | 119.8954622 | 0.701722629 | 105.9143963 | 0.800277631 | 104.6725155 | 0.865817086 | 104.5262518 | 0.874019575 | 104.4286197 | 0.876853848 | |
| 25BUS | 0.159 | 1 | 96.02587579 | 0.962654493 | 95.70324743 | 0.967612919 | 95.53968201 | 0.965132954 | 95.44932754 | 0.961267271 | 95.37760176 | 0.955787256 |
| 0.16 | 0 | 133.3412024 | 0.693013903 | 113.7846351 | 0.839787271 | 113.6981061 | 0.868059675 | 113.6495475 | 0.882103523 | 113.593138 | 0.912946692 | |
| 26BUS | 0.119 | 1 | 94.64078926 | 0.979718821 | 94.46951484 | 0.976854143 | 94.37479489 | 0.976644748 | 94.28812295 | 0.97385059 | 94.20371586 | 0.974373923 |
| 0.12 | 0 | 133.9743585 | 0.702262579 | 93.83045786 | 0.967168856 | 93.71703003 | 0.964651349 | 93.634102 | 0.954474103 | 93.58027514 | 0.952556402 | |
| 27BUS | 0.15 | 1 | 94.64078926 | 0.979718821 | 94.46951484 | 0.976854143 | 94.37479489 | 0.976644748 | 94.28812295 | 0.97385059 | 94.20371586 | 0.974373923 |
| 0.151 | 0 | 120.6452889 | 0.711985682 | 119.6205942 | 0.697735852 | 108.314783 | 0.835208306 | 108.1842291 | 0.856605282 | 108.074389 | 0.875480965 | |
| 28BUS | 0.12 | 1 | 93.70982682 | 1.013354868 | 93.70790084 | 1.015115552 | 93.70810549 | 0.944737386 | 93.70762744 | 0.948885287 | 93.70417222 | 0.968854208 |
| 0.121 | 0 | 135.3150783 | 0.701496427 | 93.64768174 | 0.962285457 | 93.49341869 | 0.958625572 | 93.4140093 | 0.950331284 | 93.34209711 | 0.947862824 | |
| 29BUS | 0.103 | 1 | 94.21689878 | 0.977826032 | 94.00598487 | 0.984383213 | 93.92974447 | 0.981454033 | 93.85065056 | 0.985910435 | 93.78009398 | 0.984891019 |
| 0.104 | 0 | 135.0731176 | 0.706603598 | 93.53803956 | 0.964498131 | 93.41400656 | 0.961247461 | 93.34709548 | 0.952619885 | 93.27525088 | 0.949690405 | |
| 30BUS | 0.286 | 1 | 95.32889648 | 0.966875467 | 95.14444735 | 0.975102274 | 95.03974705 | 0.966391289 | 94.94019077 | 0.965485962 | 94.8612708 | 0.969697576 |
| 0.287 | 0 | 129.2217328 | 0.582331669 | 125.6196868 | 0.594226492 | 113.3676557 | 0.868058741 | 113.2476765 | 0.874023458 | 113.1605724 | 0.87239901 | |
| Table S1. Validity of the stability boundary. (meta-generators in the 10-gen)(Continued) | ||||||||||||
| BUS No. | ∆t (s) | stability | δ6 (°) | U6 (p.u.) | δ7 (°) | U7 (p.u.) | δ8 (°) | U8 (p.u.) | δ9 (°) | U9 (p.u.) | δ10 (°) | U10 (p.u.) |
| 21BUS | 0.138 | 1 | 95.19467421 | 0.960057081 | 95.10621633 | 0.959057511 | 95.01119537 | 0.958072144 | 94.85614387 | 0.957733478 | 94.57548054 | 0.965947546 |
| 0.139 | 0 | 97.31461471 | 0.920061004 | 97.21738441 | 0.918142789 | 97.09801703 | 0.915122849 | 96.92916067 | 0.91549989 | 95.03232631 | 0.952937741 | |
| 22BUS | 0.129 | 1 | 94.65235025 | 0.975154638 | 94.57057 | 0.969619585 | 94.47772576 | 0.968562189 | 94.33865891 | 0.968860195 | 94.05953856 | 0.974793213 |
| 0.130 | 0 | 107.7974987 | 0.877233818 | 107.7082762 | 0.88288952 | 107.5829084 | 0.889768656 | 107.4285448 | 0.893455062 | 92.88329878 | 0.927568436 | |
| 23BUS | 0.144 | 1 | 95.61073536 | 0.957764138 | 95.52253657 | 0.952081834 | 95.40443159 | 0.946991929 | 95.24500295 | 0.95168074 | 95.00533082 | 0.959777026 |
| 0.145 | 0 | 96.0934173 | 0.940408736 | 96.00838738 | 0.94281942 | 95.90426519 | 0.942688751 | 95.76802895 | 0.945136127 | 95.57429465 | 0.947873563 | |
| 24BUS | 0.135 | 1 | 95.32098884 | 0.960877336 | 95.24019294 | 0.961680485 | 95.14082104 | 0.960398861 | 95.00227761 | 0.965458131 | 94.79439156 | 0.978541034 |
| 0.136 | 0 | 104.3304082 | 0.867972264 | 104.2348118 | 0.875017611 | 104.1184124 | 0.87397991 | 103.9412118 | 0.868476652 | 94.84326042 | 0.92468064 | |
| 25BUS | 0.159 | 1 | 95.31563877 | 0.956525212 | 95.24168801 | 0.956074993 | 95.14139612 | 0.963841364 | 94.97932759 | 0.972905427 | 94.65146029 | 0.965928151 |
| 0.16 | 0 | 113.5527275 | 0.912662219 | 113.5009234 | 0.886053948 | 113.4525847 | 0.869711039 | 113.3636729 | 0.849122059 | 90.18551593 | 0.90635071 | |
| 26BUS | 0.119 | 1 | 94.12049594 | 0.972515877 | 94.04409414 | 0.974958696 | 93.95519675 | 0.979695682 | 93.86849268 | 0.983415177 | 93.68362091 | 0.986510065 |
| 0.12 | 0 | 93.53595878 | 0.952735107 | 93.49196777 | 0.95127026 | 93.4459171 | 0.952760285 | 93.37848586 | 0.964990895 | 93.22490332 | 0.971507106 | |
| 27BUS | 0.15 | 1 | 94.12049594 | 0.972515877 | 94.04409414 | 0.974958696 | 93.95519675 | 0.979695682 | 93.86849268 | 0.983415177 | 93.68362091 | 0.986510065 |
| 0.151 | 0 | 107.99803 | 0.879247481 | 107.9211172 | 0.880154848 | 107.8122234 | 0.859097786 | 107.6684962 | 0.840527801 | 93.17638293 | 0.921128286 | |
| 28BUS | 0.12 | 1 | 93.70637581 | 0.965314003 | 93.70727271 | 1.018336492 | 93.70700459 | 1.035278096 | 93.70518428 | 0.938892924 | 93.70737889 | 0.994130695 |
| 0.121 | 0 | 93.2937229 | 0.947159785 | 93.2499328 | 0.94575947 | 93.1878376 | 0.9507095 | 93.11040833 | 0.959872069 | 92.94701032 | 0.96483946 | |
| 29BUS | 0.103 | 1 | 93.72411291 | 0.984947341 | 93.65416714 | 0.98318043 | 93.58434117 | 0.980572759 | 93.50900284 | 0.986938491 | 93.28827153 | 0.985385632 |
| 0.104 | 0 | 93.22568816 | 0.951203443 | 93.17591941 | 0.948545722 | 93.10966834 | 0.953378356 | 93.0442657 | 0.959869975 | 92.91050319 | 0.968643993 | |
| 30BUS | 0.286 | 1 | 94.78749482 | 0.971889065 | 94.712031 | 0.966645687 | 94.61212148 | 0.973325842 | 94.50209129 | 0.975328456 | 94.31284691 | 0.975748446 |
| 0.287 | 0 | 113.0783706 | 0.872929675 | 112.9886077 | 0.868893958 | 112.883801 | 0.878444108 | 112.7668396 | 0.882022069 | 91.47404051 | 0.915203353 | |
| Table S1. Validity of the stability boundary. (meta-generators in the 10-gen)(Continued) | ||||||||||||
| BUS No. | ∆t (s) | stability | δ1 (°) | U1 (p.u.) | δ2 (°) | U2 (p.u.) | δ3 (°) | U3 (p.u.) | δ4 (°) | U4 (p.u.) | δ5 (°) | U5 (p.u.) |
| 31BUS | 0.145 | 1 | 96.00646358 | 0.925662494 | 95.71446695 | 0.962222649 | 95.58292152 | 0.971792274 | 95.50834347 | 0.976985212 | 95.44524986 | 0.980330825 |
| 0.146 | 0 | 135.3337864 | 0.580943773 | 101.9518056 | 0.883271559 | 101.7757573 | 0.905465022 | 101.692181 | 0.905670925 | 101.6216516 | 0.915194068 | |
| 32BUS | 0.176 | 1 | 96.13122329 | 0.925948256 | 95.87235659 | 0.959079245 | 95.72946277 | 0.973537906 | 95.630327 | 0.974917441 | 95.5450373 | 0.981658171 |
| 0.177 | 0 | 105.5706819 | 0.791003618 | 96.46740327 | 0.938634198 | 96.33506578 | 0.965076827 | 96.2467396 | 0.962364038 | 96.16354044 | 0.964753733 | |
| 33BUS | 0.131 | 1 | 94.03647594 | 0.95428025 | 93.75268679 | 0.98568092 | 93.61904957 | 0.986931149 | 93.542537 | 0.984132154 | 93.47875945 | 0.981674278 |
| 0.132 | 0 | 96.3778254 | 0.899047921 | 94.36998905 | 0.966016737 | 94.21127419 | 0.979774323 | 94.13291233 | 0.97888059 | 94.06895094 | 0.976575827 | |
| 34BUS | 0.151 | 1 | 94.90617558 | 0.966874703 | 94.73046735 | 0.974074298 | 94.61662852 | 0.981411959 | 94.53076125 | 0.981708921 | 94.45707998 | 0.980959225 |
| 0.152 | 0 | 133.2007362 | 0.616571634 | 101.7717008 | 0.817471419 | 99.50193077 | 0.879410295 | 99.23682192 | 0.864908146 | 99.12078398 | 0.864997041 | |
| 35BUS | 0.145 | 1 | 96.55399649 | 0.938827486 | 96.19414687 | 0.944042454 | 96.01640433 | 0.952363418 | 95.90417777 | 0.959620685 | 95.8101293 | 0.960553003 |
| 0.146 | 0 | 119.0814082 | 0.664094473 | 109.4932682 | 0.865759665 | 109.2449151 | 0.855376302 | 109.1088331 | 0.838457706 | 108.9821996 | 0.841057356 | |
| 36BUS | 0.208 | 1 | 96.90247289 | 0.950480115 | 96.64618552 | 0.953233953 | 96.49896917 | 0.951387726 | 96.38257486 | 0.952074383 | 96.29514717 | 0.959536582 |
| 0.209 | 0 | 110.4420713 | 0.755853593 | 103.5047922 | 0.890433763 | 103.3071599 | 0.892079665 | 103.1825654 | 0.900228841 | 103.0813206 | 0.902691719 | |
| 37BUS | 0.168 | 1 | 94.94222696 | 0.957256982 | 94.51017388 | 0.969743103 | 94.367579 | 0.971234788 | 94.27570747 | 0.96906911 | 94.20711836 | 0.972812384 |
| 0.169 | 0 | 113.4007788 | 0.795416732 | 95.12970501 | 0.936361469 | 94.83890772 | 0.947233778 | 94.72514878 | 0.944992174 | 94.65372992 | 0.946502879 | |
| 38BUS | 0.099 | 1 | 94.0809412 | 0.975871809 | 93.86366815 | 0.987930455 | 93.7901087 | 0.985365507 | 93.71685134 | 0.987561439 | 93.64328531 | 0.986885182 |
| 0.1 | 0 | 134.2038708 | 0.704318366 | 93.47052963 | 0.968585117 | 93.36713812 | 0.960824913 | 93.3206924 | 0.966727246 | 93.25213146 | 0.960475752 | |
| 39BUS | 0.338 | 1 | 95.69609323 | 0.958127471 | 95.51500602 | 0.959037831 | 95.4053055 | 0.974222799 | 95.3218433 | 0.981492804 | 95.25325365 | 0.983042659 |
| 0.339 | 0 | 117.5649081 | 0.761814728 | 113.3547282 | 0.74132912 | 109.9341294 | 0.829295872 | 109.8147867 | 0.851616627 | 109.7236082 | 0.86253913 | |
| Table S1. Validity of the stability boundary. (meta-generators in the 10-gen)(Continued) | ||||||||||||
| BUS No. | ∆t (s) | stability | δ6 (°) | U6 (p.u.) | δ7 (°) | U7 (p.u.) | δ8 (°) | U8 (p.u.) | δ9 (°) | U9 (p.u.) | δ10 (°) | U10 (p.u.) |
| 31BUS | 0.145 | 1 | 95.3753097 | 0.980331999 | 95.31678107 | 0.980092309 | 95.23974678 | 0.968696982 | 95.11213571 | 0.96098943 | 94.80760875 | 0.932295747 |
| 0.146 | 0 | 101.56803 | 0.913795372 | 101.4902257 | 0.910249225 | 101.420495 | 0.907956912 | 101.2952403 | 0.897084388 | 95.53276768 | 0.911107971 | |
| 32BUS | 0.176 | 1 | 95.46300513 | 0.976945767 | 95.37216461 | 0.976084253 | 95.26865262 | 0.971636372 | 95.12044564 | 0.960917591 | 94.8589611 | 0.93710973 |
| 0.177 | 0 | 96.08614904 | 0.965812694 | 95.99917308 | 0.965296887 | 95.91409888 | 0.967375697 | 95.80326828 | 0.960803388 | 95.57587023 | 0.914188021 | |
| 33BUS | 0.131 | 1 | 93.41967686 | 0.982232939 | 93.35505186 | 0.982744208 | 93.2852666 | 0.989036477 | 93.14685969 | 0.989170865 | 92.85986639 | 0.9686506 |
| 0.132 | 0 | 94.00958109 | 0.978122294 | 93.94573978 | 0.976723358 | 93.87622621 | 0.977638666 | 93.74672096 | 0.982446887 | 93.41794104 | 0.957841954 | |
| 34BUS | 0.151 | 1 | 94.39143485 | 0.980285452 | 94.31289061 | 0.981443568 | 94.22624048 | 0.97789006 | 94.10969186 | 0.976598031 | 93.93050555 | 0.980136262 |
| 0.152 | 0 | 99.00036677 | 0.869167371 | 98.87520315 | 0.877421974 | 98.60491523 | 0.87211062 | 98.47785939 | 0.87496015 | 93.4289497 | 0.950283633 | |
| 35BUS | 0.145 | 1 | 95.72188876 | 0.958536902 | 95.63169523 | 0.961640525 | 95.52223313 | 0.956358826 | 95.35607991 | 0.947104293 | 94.9648387 | 0.9515796 |
| 0.146 | 0 | 108.8562397 | 0.841849815 | 108.741715 | 0.852498996 | 108.6070548 | 0.853536302 | 108.3562813 | 0.874876892 | 94.20755501 | 0.917552779 | |
| 36BUS | 0.208 | 1 | 96.21095426 | 0.95768021 | 96.11438719 | 0.954354233 | 95.99159726 | 0.955035992 | 95.83686503 | 0.956071659 | 95.58364697 | 0.960663163 |
| 0.209 | 0 | 102.9909169 | 0.898958651 | 102.8964269 | 0.897294653 | 102.7649712 | 0.896895692 | 102.5758144 | 0.897864088 | 95.3762545 | 0.921149995 | |
| 37BUS | 0.168 | 1 | 94.14643545 | 0.969596642 | 94.08414703 | 0.969790985 | 93.99671423 | 0.967111769 | 93.84367713 | 0.975457796 | 93.39777497 | 0.969109835 |
| 0.169 | 0 | 94.59783484 | 0.943873523 | 94.53490787 | 0.939311569 | 94.44639645 | 0.944852404 | 94.29953664 | 0.954335412 | 93.88563734 | 0.939982454 | |
| 38BUS | 0.099 | 1 | 93.58723994 | 0.989131664 | 93.51493365 | 0.988248001 | 93.44561152 | 0.982965027 | 93.3765968 | 0.988985527 | 93.14700785 | 0.983263153 |
| 0.1 | 0 | 93.21970513 | 0.957895262 | 93.18166187 | 0.96001971 | 93.13643951 | 0.957871124 | 93.07055057 | 0.964490795 | 92.93527414 | 0.972985892 | |
| 39BUS | 0.338 | 1 | 95.17705777 | 0.98204963 | 95.10556515 | 0.975484338 | 95.01362922 | 0.973099235 | 94.89905437 | 0.966554968 | 94.72607143 | 0.94710906 |
| 0.339 | 0 | 109.611875 | 0.849164168 | 109.5272771 | 0.86071952 | 109.4078691 | 0.840488246 | 109.2388728 | 0.831913218 | 93.38489471 | 0.903792194 | |
The system has a total of 39 nodes (New England test system). Stability calculations have been performed at each node where a large disturbance fault occurred, one by one. The results of the calculations record the state points of each meta-generator when the system is stable or unstable. “BUS No.” indicates the number of the nodes where the failure occurred. represents the fault clearing time and . “1” indicates that the system is synchronously stable, and “0” indicates that the system is out of synchronization. When the system is stable, the results in Table S1 reveal that is true. Where and are calculated via Eq. (S3). Substituting these data into Eq. (1) yields a visualization similar to that in Figure 2(b). These results indicate that Eq. (1) can well discriminate the synchronization stability of the power system well. The stability boundary discriminates the 39 pairs of cases with an accuracy of 100%. These results validate Eq. (1), and after transformation, also validate Eq. (C5). Considering space limitations, these results are presented in Table S1.
Data Availability Statement
All raw data for this article are publicly available at https://doi.org/10.57760/sciencedb.24825.
Conflicts of Interest
The author declare no conflicts of interest.
References
- Koronovskii, A.A.; Moskalenko, O.I.; Hramov, A.E. synchronization in complex networks. Tech. Phys. Lett. 2012, 38, 924–927. [Google Scholar] [CrossRef]
- Dörfler, F.; Chertkov, M.; Bullo, F. Synchronization in complex oscillator networks and smart grids. Proc. Natl. Acad. Sci. U. S. A. 2013, 110, 2005–2010. [Google Scholar] [CrossRef]
- Shi, Di.; Lü, L.; Chen, G. Totally homogeneous networks. Natl. Sci. Rev. 2019, 6, 962–969. [Google Scholar] [CrossRef]
- Wu, K.; Hao, X.; Liu, J.; Liu, P.; Shen, F. Online Reconstruction of Complex Networks From Streaming Data. IEEE Trans. Cybern. 2022, 52, 5136–5147. [Google Scholar] [CrossRef] [PubMed]
- Linyuan, L.L.; Zhou, T. Link prediction in complex networks: A survey. Phys. A Stat. Mech. its Appl. 2011, 390, 1150–1170. [Google Scholar] [CrossRef]
- Xu, Y.; Zhou, W.; Fang, J. Topology identification of the modified complex dynamical network with non-delayed and delayed coupling. Nonlinear Dyn. 2012, 68, 195–205. [Google Scholar] [CrossRef]
- Meena, C.; Hens, C.; Acharyya, S.; Haber, S.; Boccaletti, S.; Barzel, B. Emergent stability in complex network dynamics. Nat. Phys. 2023, 19, 1033–1042. [Google Scholar] [CrossRef]
- Dörfler, F.; Bullo, F. Synchronization and transient stability in power networks and nonuniform Kuramoto oscillators. SIAM J. Control Optim. 2012, 50, 1616–1642. [Google Scholar] [CrossRef]
- Watts, D.J.; Strogatz, S.H. Collective dynamics of “small-world” networks. Nature 393, 440–442 (1998).
- Barahona, M.; Pecora, L.M. Synchronization in Small-World Systems. Phys. Rev. Lett. 89, 54101 (2002).
- Strogatz, S.H. Sync: The Emerging Science of Spontaneous Order (Hyperion, 2003).
- Wang, B.; Fang, B.; Wang, Y.; Liu, H.; Liu, Y. Power System Transient Stability Assessment Based on Big Data and the Core Vector Machine. IEEE Trans. Smart Grid 2016, 7, 2561–2570. [Google Scholar] [CrossRef]
- Zhu, L.; Hill, D.J. Synchronization of Kuramoto Oscillators: A Regional Stability Framework. IEEE Trans. Automat. Contr. 65, 5070–5082 (2020).
- Xu, Z.; Li, X.; Duan, P. Synchronization of complex networks with time-varying delay of unknown bound via delayed impulsive control. Neural Networks 125, 224–232 (2020).
- Smith, O.; Coombes, S.; O’Dea, R.D. Stability Analysis of Electrical Microgrids and Their Control Systems. PRX Energy 3, 1 (2024).
- Motter, A.E.; Myers, S.A.; Anghel, M.; Nishikawa, T. Spontaneous synchrony in power-grid networks. Nat. Phys. 9, 191–197 (2013).
- Chiang, H.D.; Wu, F.F.; Varaiya, P.P. A BCU Method for Direct Analysis of Power System Transient Stability. IEEE Trans. Power Syst. 9, 1194–1208 (1994).
- Wu, X.; Xi, K.; Cheng, A.; Lin, H.X.; van Schuppen, J.H. Increasing the synchronization stability in complex networks. Chaos 33 ( 2023. [CrossRef]
- Li, X.; Wei, W.; Zheng, Z. Promoting synchrony of power grids by restructuring network topologies. Chaos An Interdiscip. J. Nonlinear Sci. 33, 63149 (2023).
- Casals, M.R.; Bologna, S.; Bompard, E.F.; D’, G.; Agostino, N.A.; Ellens, W.; Pagani, G.A.; Scala, A.; Verma, T. Knowing power grids and understanding complexity science. Int. J. Crit. Infrastructures 11, 4 (2015).
- Yu, Y.; Liu, Y.; Qin, C.; Yang, T. Theory and Method of Power System Integrated Security Region Irrelevant to Operation States: An Introduction. Engineering 6, 754–777 (2020).
- Yang, P.; Liu, F.; Wei, W.; Wang, Z. Approaching the Transient Stability Boundary of a Power System: Theory and Applications. IEEE Trans. Autom. Sci. Eng. 1–12 (2022).
- Kuramoto, Y.; Battogtokh, D. Coexistence of Coherence and Incoherence in Nonlocally Coupled Phase Oscillators. Physics (College. Park. Md). 2002, 4, 380–385. [Google Scholar] [CrossRef]
- Cho, Y.S.; Nishikawa, T.; Motter, A.E. Stable Chimeras and Independently Synchronizable Clusters. Phys. Rev. Lett. 2017, 119. [Google Scholar] [CrossRef]
- Fan, H.; Kong, L.W.; Wang, X.; Hastings, A.; Lai, Y.C. Synchronization within synchronization: Transients and intermittency in ecological networks. Natl. Sci. Rev. 2021, 8, 0–9. [Google Scholar] [CrossRef] [PubMed]
- Sorrentino, F.; Pecora, L.M.; Hagerstrom, A.M.; Murphy, T.E.; Roy, R. Complete characterization of the stability of cluster synchronization in complex dynamical networks. Sci. Adv. 2016, 2, 1–8. [Google Scholar] [CrossRef]
- Ajala, O.; Dominguez-Garcia, A.; Sauer, P.; Liberzon, D. A Second-Order Synchronous Machine Model for Multi-swing Stability Analysis. 51st North Am. Power Symp. NAPS 2019 2019. [Google Scholar] [CrossRef]
- Alberto, L.F.C.; Bretas, N.G. Required damping to assure multiswing transient stability: the SMIB case. Int. J. Electr. Power Energy Syst. 2000, 22, 179–185. [Google Scholar] [CrossRef]
- Anderson, P.M.; Fouad, A.A. Power system control and stability; John Wiley & Sons, 2008. ISBN 812651 8189.
- Pai, A. Energy Function Analysis for Power System Stability (Springer Science & Business Media, 1989).
- Holland, M.D.; Hastings, A. Strong effect of dispersal network structure on ecological dynamics. Nature 2008, 456, 792–794. [Google Scholar] [CrossRef] [PubMed]
- Chen, G. Searching for Best Network Topologies with Optimal Synchronizability: A Brief Review. IEEE/CAA J. Autom. Sin. 2022, 9, 573–577. [Google Scholar] [CrossRef]
- Nishikawa, T.; Sun, J.; Motter, A.E. Sensitive dependence of optimal network dynamics on network structure. Phys. Rev. X 2017, 7, 1–21. [Google Scholar] [CrossRef]
- Pecora, L.M.; Sorrentino, F.; Hagerstrom, A.M.; Murphy, T.E.; Roy, R. Cluster synchronization and isolated desynchronization in complex networks with symmetries. Nat. Commun. 2014, 5. [Google Scholar] [CrossRef]
- Denker, M.; Timme, M.; Diesmann, M.; Wolf, F.; Geisel, T. Breaking Synchrony by Heterogeneity in Complex Networks. Phys. Rev. Lett. 2004, 92, 1–4. [Google Scholar] [CrossRef]
- Karatekin, C.Z.; Uçak, C. Sensitivity analysis based on transmission line susceptances for congestion management. Electr. Power Syst. Res. 2008, 78, 1485–1493. [Google Scholar] [CrossRef]
- Molnar, F.; Nishikawa, T.; Motter, A.E. Asymmetry underlies stability in power grids. Nat. Commun. 2021, 12, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Nishikawa, T.; Motter, A.E. Symmetric States Requiring System Asymmetry. Phys. Rev. Lett. 2016, 117, 114101. [Google Scholar] [CrossRef] [PubMed]
- Scheffer, M.; Carpenter, S.R.; Lenton, T.M.; Bascompte, J.; Brock, W.; Dakos, V.; Van De Koppel, J.; Van De Leemput, I.A.; Levin, S.A.; Van Nes, E.H.; et al. Anticipating critical transitions. Science (80-. ). 2012, 338, 344–348. [Google Scholar] [CrossRef] [PubMed]
- Dörfler, F.; Bullo, F. Synchronization in complex networks of phase oscillators: A survey. Automatica 2014, 50, 1539–1564. [Google Scholar] [CrossRef]
- Fan, H.; Wang, Y.; Wang, X. Eigenvector-based analysis of cluster synchronization in general complex networks of coupled chaotic oscillators. Front. Phys. 2023, 18. [Google Scholar] [CrossRef]
- Wu, Z.; Zhou, X. “Power System Analysis Software Package (PSASP)-an integrated power system analysis tool” in POWERCON ’98. 1998 International Conference on Power System Technology. Proceedings (Cat. No.98EX151) (IEEE; http://ieeexplore.ieee.org/document/728602/)vol. 1, pp. 7–11.
Figure 1.
Validity of the stability boundary (meta-generators in the 10-gen).
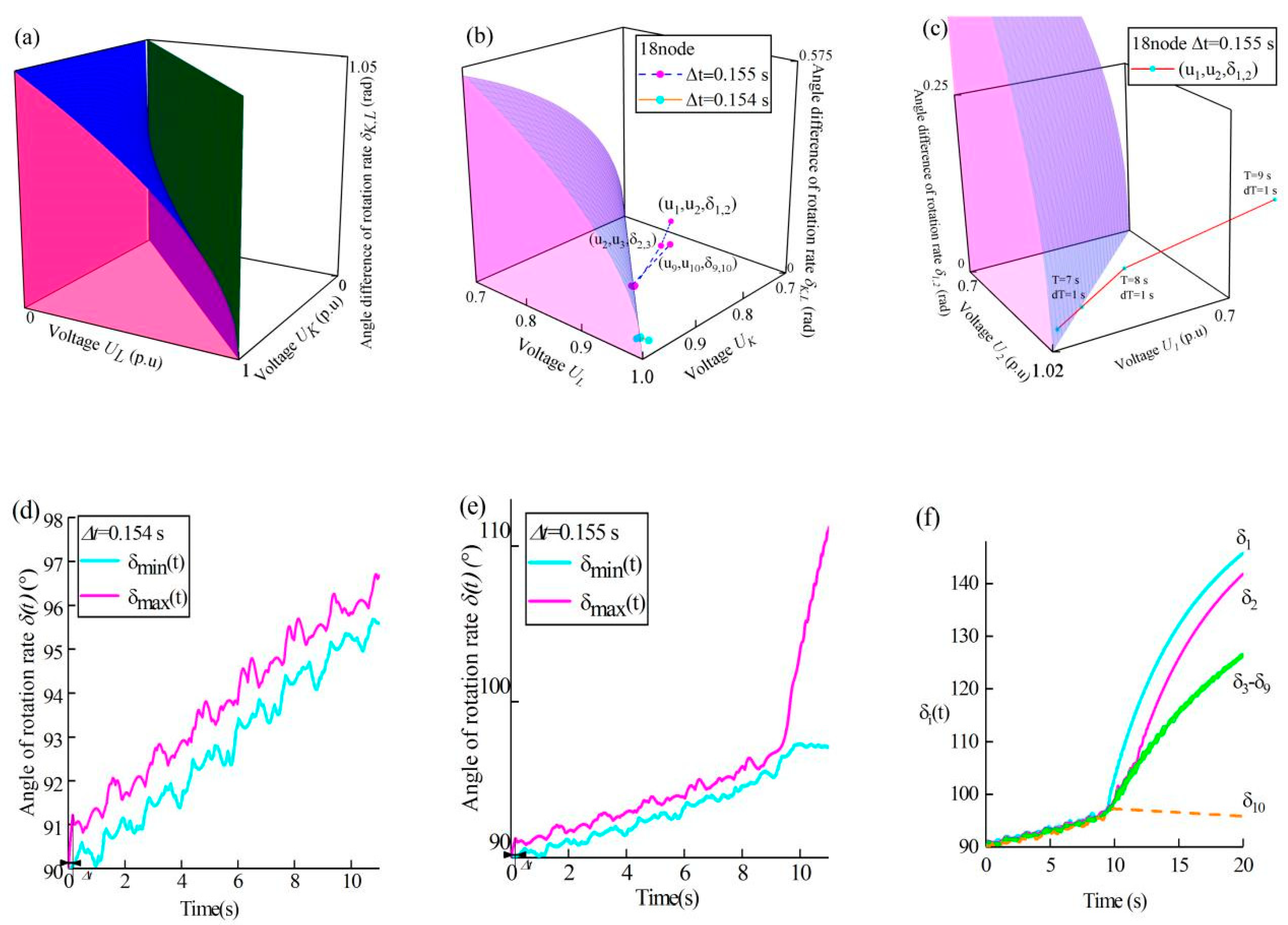
Figure 2.
Validation of the network-independent synchronization stability boundary on a completely different system. (meta-generators in the 3-gen).
Figure 2.
Validation of the network-independent synchronization stability boundary on a completely different system. (meta-generators in the 3-gen).

Figure 3.
Emergence of self-organization near the stability boundary. (meta-generators in the 10-gen).
Figure 3.
Emergence of self-organization near the stability boundary. (meta-generators in the 10-gen).
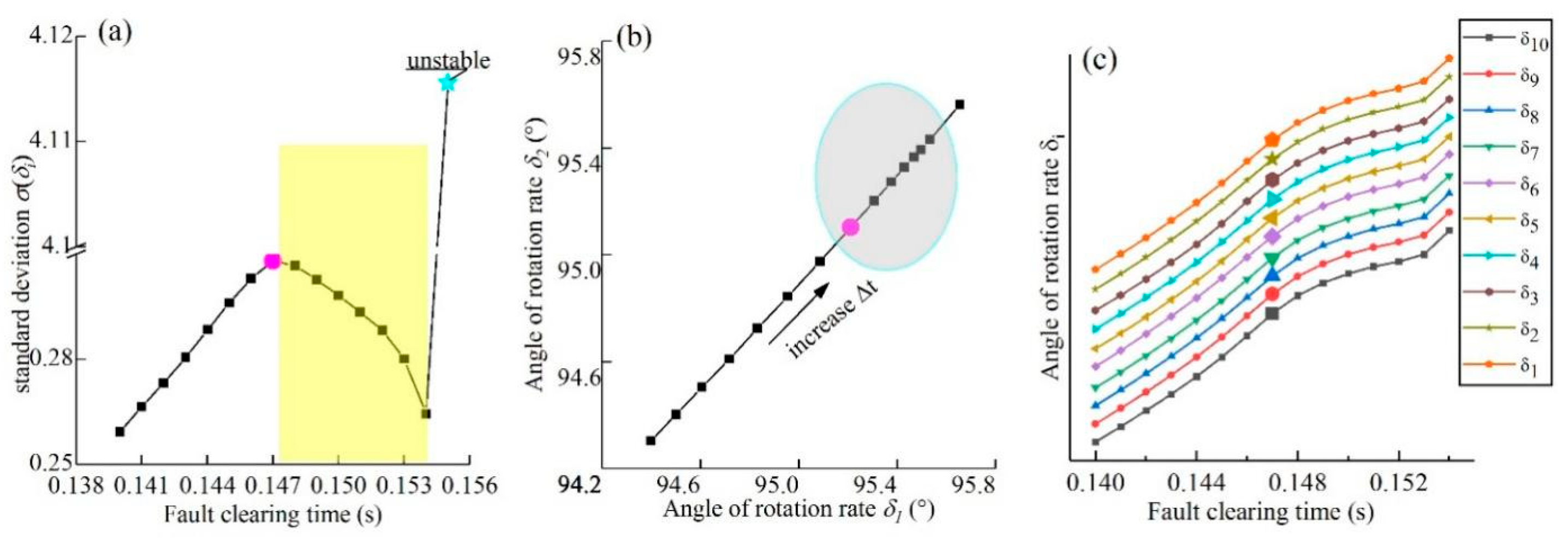
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
|
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



