Submitted:
20 October 2023
Posted:
24 October 2023
You are already at the latest version
Abstract
This research investigates the utilization of human driving models in autonomous vehicles, particularly in scenarios with minimal or no interactions with other vehicles. Human driving models provide valuable insights into driver behavior and play a crucial role in shaping the behavior of autonomous vehicles, enhancing their performance and user experience. The primary focus of the study is the creation of a planning model for autonomous vehicles when navigating roundabouts in the absence of traffic. This model seeks to emulate human driving behavior, ensuring predictability, safety, optimization of traffic flow, and adaptation to various roundabout geometries. To achieve this, the research introduces a trajectory model that takes into account geometric attributes and speed variations within roundabouts. The model is calibrated using empirical data and generalizes parameters through statistical regression methodologies. This model is referred to as "MRoundabout" and is evaluated for its consistency in generating plans that closely mimic human driving behavior within roundabouts. While the study presents a promising approach, it acknowledges limitations related to the model's reliance on geometric attributes and its inability to account for external factors like weather conditions. This research underscores the importance of bridging the gap between theoretical research and practical application, with the aim of enhancing safety and the overall user experience in real-world driving scenarios.
Keywords:
Autonomous vehicles
; Human driving models
; Roundabouts
; Speed profiles
; Traffic-free planning
1. Introduction
Autonomous vehicles can benefit from human driving models in various ways, whether they need to interact with other vehicles in complex situations or if interactions with other vehicles are rare or limited [1,2]. Here’s how these models can be useful in both cases:
- 1)
- Interaction with other vehicles: In contexts where autonomous vehicles have to interact with other vehicles on the roads, human driving models can provide valuable insights into driver behavior and driving dynamics. By studying and learning from human driver data, autonomous vehicles can learn how to behave in complex situations such as standard intersections, roundabouts, or curves. For example, human driving models can provide information on trajectory choices, appropriate speeds in certain situations, and common driving habits. This information can be used by autonomous vehicles to make safer and more predictable decisions during interactions with other vehicles on the road.
- 2)
- Limited interaction scenarios: Even when interactions with other vehicles are rare or limited, human driving models can be useful for autonomous vehicles. For example, in autonomous driving situations in rural areas or areas with low traffic density, vehicles encounter fewer or no vehicles. Nevertheless, human driving models can provide information on how to handle certain road elements with conditional geometry (curves, roundabouts, highway ramps, etc.) or traffic signs or adverse weather conditions. Additionally, human driving models can be used to provide a more comfortable and familiar driving experience for passengers. For instance, if a human driver prefers gradual acceleration or gentle braking in certain situations, the autonomous vehicle can learn such habits and replicate them to provide a more human-like driving experience.
In this context, speed profiles obtained through naturalistic observations can be extremely useful for the human driving models employed in the learning phases of autonomous vehicles [3,4]. Here’s why:
- a)
- Real-world data: Naturalistic speed profiles are based on real data collected from vehicles in real driving conditions. These data represent the actual behavior of human drivers in real-world situations, allowing the human driving models to learn from authentic experiences. This helps make the models more accurate and adaptable to various road situations.
- b)
- Contextual variation: Naturalistic speed profiles capture the variation of speed in different driving situations and contexts. This includes information about average speeds, maximum speeds, and typical decelerations/accelerations in certain areas or types of roads. Learning from these variations allows the driving models to guide autonomous vehicles to behave more realistically and consistently with human drivers in different scenarios, improving safety and efficiency in the autonomous driving system.
- c)
- Consideration of individual preferences: Naturalistic speed profiles can also reflect individual driver preferences regarding speed and driving style. These preferences can be learned and taken into account by the human driving models during the learning process of autonomous vehicles. This enables autonomous vehicles to adapt to the preferences of human drivers or passengers, providing a more familiar and personalized driving experience.
- d)
- Performance enhancement: Using naturalistic speed profiles can contribute to overall performance improvements in autonomous vehicles. For example, they can be used to fine-tune control algorithms, improve trajectory planning, or optimize acceleration and deceleration strategies. Integrating real driver data into the human driving models helps autonomous vehicles learn from realistic driving examples and develop more effective driving strategies.
Specifically with respect to the approach of autonomous vehicles to roundabouts, the collection of speed profiles obtained through naturalistic surveys may be particularly useful for the following reasons [5,6,7,8]:
- These profiles help autonomous vehicles understand appropriate speeds, acceleration, and deceleration required for safe driving.
- Contextualized speed profiles help autonomous vehicles make more informed decisions based on specific road contexts. For example, they enable speed adjustment based on the presence of other vehicles in roundabouts or traffic conditions.
- Naturalistic speed profiles allow autonomous vehicles to adapt to different roundabout geometries, and to understand and respect the laws of physics governing the dynamic behavior of vehicles. This includes managing centripetal force, optimizing tire friction and grip, and maintaining stability during curves.
- Naturalistic speed profiles can be used for validation and testing of autonomous driving systems. They allow comparing the behavior of autonomous vehicles with known human speed profiles to evaluate the effectiveness of the autonomous system and identify any necessary improvements.
This study proposes a model for planning the crossing of a single-lane roundabout, based simultaneously on the specification of the geometric curve and on the generation of the speed plane. The aim is to achieve a “human-like” planning, i.e. a planning based on the imitation of the human driving behavior within the limits of a safe driving mode.
It should be noted that the crossing trajectory considered is the fastest trajectory in a roundabout, i.e., the crossing trajectory without significant interference from other user categories (vehicles, pedestrians, bicyclists, etc.). Therefore, traffic-free design results in a crossing trajectory that considers only the geometric elements that make up a roundabout (diameter, entry radius, exit radius, deflection angle, lane width) and ignores other road users and other obstacles. Therefore, the crossing trajectory planning model must be able to generate a dynamically feasible trajectory based on aspects of human driving behavior that does not involve traffic impacts.
It is believed that this type of modeling is useful for at least the following four aspects:
- ➢
- Predictable behavior: The fastest crossing trajectory with no interaction with other road users represents a predictable and safe behavior model that has been solidified by human driver experience. Validation and testing of autonomous vehicles on this route allows them to learn and adopt behaviors that humans recognize as effective.
- ➢
- Safety: crossing roundabouts quickly and efficiently can contribute to road safety. Modeling autonomous vehicles on the fastest crossing route can verify that the autonomous system can maintain an appropriate speed and perform the proper maneuvers to safely traverse the roundabout, avoiding slowdowns and potential hazards.
- ➢
- Optimizing traffic flow: the correct behavior of autonomous vehicles when passing through single-lane roundabouts can help optimize traffic flow. If autonomous vehicles follow the fastest crossing trajectory without interacting with other road users, they can help reduce roundabout crossing times and improve traffic flow.
- ➢
- Adaptation to road conditions: Naturalistic speed profiles based on the fastest crossing trajectory can vary depending on the geometric characteristics of roundabouts. The model to be proposed allows autonomous vehicles to adapt to different roundabout configurations, such as diameter, entry radius, exit radius, deflection angle, and lane width. In this way, autonomous vehicles can learn the appropriate behavior and be able to negotiate single-lane roundabouts safely and efficiently, regardless of the specific geometric specifications.
In order to attain the aforementioned objective, this work has been structured into the subsequent sections: Section 2 outlines the review of relevant literature. Section 3 introduces suitable path and speed models aimed at capturing human driving behavior. Section 4 elaborates on the calibration process of the speed model. Section 5 details the experimental investigations. Section 6 and Section 7 are dedicated to presenting the outcomes of the learning process, summarizing the study, and offering recommendations for future research.
The framework of the proposed analysis method is shown in Figure 1.
2. Literature review
In recent decades, autonomous vehicle trajectory planning efforts have generally focused on first finding an optimal and safe spatial maneuver and then using rule-based speed assignment to form a target trajectory that is evaluated for collision avoidance [9,10].
Some studies have investigated how vehicle movement in different road scenarios is also determined by road geometry, i.e., curvy roads force the driver to slow down the vehicle to reduce the driving discomfort caused by increasing lateral accelerations. In one study, a geometry-based speed planning approach was proposed by generating a reference path for the autonomous vehicle by combining the smooth and peak-reduced curve and a parameterized speed model fitted from human driving data [11].
In addition, a combined behavior planning and trajectory planning method was proposed in which the sampled trajectories were grouped according to topological properties in the spatial-temporal domain to generate different high-level maneuver patterns [12].
For the case of road intersections, a temporal speed planning approach was developed using the behavior patterns learned from human drivers in a simulator experiment. The speed profiles from an intersection scenario were extracted to develop temporal behavior plans using the k-means clustering technique [13].
Other studies have attempted to understand human driving behavior and strategies to support autonomous driving decision making in complex traffic scenarios. Since experienced human drivers have shown that they can adapt their longitudinal speed behaviors and strategies to effectively manage complex traffic scenarios, human-inspired longitudinal speed control is seen as a promising avenue for autonomous vehicle application. This approach has two advantages: First, it makes autonomous driving more natural [14], which helps it fit seamlessly into environments with other semi-autonomous and human-controlled vehicles, and second, it will improve the driving experience, especially in scenarios that tend to involve stop-start movements or roads with severe curvature [15]. In one such study, a risk-aware decision-making approach was used to select human-like longitudinal behavior profiles for navigation in a roundabout scenario. First, the speed profiles were generated using patterns learned from human driving behavior, and then they were adapted to the dynamic characteristics of the scenario. There are two new contributions in this work, firstly, the naturalistic profile generation for human-like navigation and secondly, the risk-aware multi-criteria decision-making approach that considers driving comfort and performance in addition to driving safety. The performance of the proposed solution was compared with human driving data from experimental studies, which showed encouraging benefits [16].
Developing an advanced driver assistance system also means learning from human behavior to increase driving safety [17,18,19]. Entering roundabouts smoothly is a challenge even for human drivers [20,21,22,23,24,25]. Several studies have proposed different approaches for defining a new decision models based on imitation learning to provide recommendations for entering a roundabout.
A study shows that an Adaptive Tactical Behavior Planner (ATBP) for an autonomous vehicle is able to plan human-like movement behavior for navigating a roundabout by combining naturalistic behavior planning and tactical decision algorithms [26].
Another study presents a multi-grid image processing approach based on multiple cameras at roundabouts that include different grid sizes to increase accuracy and protect the autonomous vehicle when entering a roundabout. By using multiple cameras, the system can mimic the vision and perception of the real driver when approaching the roundabout so that a human-like decision can be made [27].
In another work, a strategy is presented to generate different speed profiles for a set of path candidates to achieve a merging maneuver on roundabouts according to the current traffic situation. The autonomous driving system proposed in this work was tested under real-world conditions, and the results showed that the automated vehicle was able to enter roundabouts with narrow gaps while maintaining both comfort and safety [28].
Based on travel data, a study proposes numerical optimization to minimize travel time and comfort through motion planning and speed profiling. The driving risks in roundabouts were also analyzed to apply the driving behavior for autonomous vehicles, which can improve the driving comfort and road safety [29]. In addition, a machine learning model was used and trained to determine the safe movement and possible exits of vehicles, and an optimal control method was developed to minimize travel time and increase energy efficiency, taking into account the constraints of collision avoidance when crossing roundabouts [30].
To coordinate autonomous vehicles in roundabouts, several researchers have developed control strategies that incorporate artificial intelligence (AI) approaches and models to ensure safe traffic. Support vector machine, linear regression, and deep learning algorithms have been compared in predicting vehicle speed and steering angle in roundabouts with different geometry for drivers, and action rules for autonomous vehicles to perform maneuvers in roundabouts have been developed [31]. Vehicle motion prediction algorithms combining dynamic Bayesian networks and sequential neural network models are also used in another research [32]. In addition, the adversarial multiagent reinforcement learning method is applied to coordinate the passage of autonomous vehicles through roundabouts by considering behaviors such as those of human drivers [33]. This method improves the travel time and average speed of vehicles. A fuzzy behavior-based roundabout coordination algorithm has also been developed to calculate speed profiles for different vehicles to achieve more comfortable driving profiles and reduce congestion [34].
There are several research works that use Model Predictive Control (MPC) strategies based on analytical calculation of travel time and speed profile design, which has been shown to be efficient for safe driving of autonomous vehicles in roundabouts. Various constraints such as speed regulations, acceleration limits, and maximum curve speeds are incorporated into the control design to ensure safe operation [35]. In one study, a method to solve the roundabout merging problem was proposed by considering a target trajectory generated by Bezier curves in combination with the MPC method [36]. In another study, a controller for roundabout trajectory tracking was presented. Given the choice of exits, the MPC tracking controller is used to test the effects of weight parameters and target speed on tracking controller performance [37].
3. Model design
In this section, models are proposed that adapt to human maneuver data and efficiently generate both the geometric curve for crossing a single-lane roundabouts and the speed plan. In order to efficiently achieve these two objectives, the path and speed models are developed and explained independently.
3.1. Path model
The autonomous vehicle must always be able to detect the presence of the roundabout on the road using sensors such as cameras, LiDAR, or radar. This allows the system to detect the position and shape of the roundabout to adapt to the predefined path. The following steps must be followed to model the path:
- 1)
- A-priori definition of the path: It is necessary to define in advance the path that the autonomous vehicle must follow to cross the roundabout. The path can be mapped based on appropriate assumptions, e.g., assuming that the vehicle must follow a curved path within the lane, maintaining a constant distance from the inner edges of the circulatory roadway. To achieve this goal, this study uses the fastest path for crossing a single-lane roundabout, as described in accordance with guidance in NCHRP Report 672 [38].
- 2)
- Waypoints generation: The predefined path can be represented by a series of control points (waypoints) that indicate the ideal position of the vehicle along the path. These waypoints can be generated manually or by algorithms that take into account the geometry of the roundabout and the formulated assumptions. The waypoints should be arranged to ensure smooth and safe navigation through the roundabout.
- 3)
- Least squares optimization: Using the Levenberg-Marquardt algorithm, it is possible to optimize the through path based on the least squares formula. In this case, the objective is to minimize the difference between the desired path (represented by the waypoints) and the actual path of the autonomous vehicle. The Levenberg-Marquardt algorithm iteratively updates the model parameters to approach the optimal solution.
Operationally, the three steps described above can be translated into the following procedural process:
- ➢
-
Path definition: The path for crossing the roundabout is determined following the NCHRP model of path [38]. This model is based on the so-called “fastest through path” allowed by the geometry, which determines the negotiation speed for the respective movement into, through and out of the roundabout. It is the smoothest, flattest path possible for a single vehicle, in the absence of other traffic and ignoring all lane markings. The fastest path is drawn for a vehicle traversing through the entry, around the central island, and out the relevant exit. Figure 2 illustrates the construction of the fastest vehicle path at a single-lane roundabout. The fastest path for the through movement is a series of reverse curves (i.e., a curve to the right followed by a curve to the left followed by a curve to the right). When drawing the path, a tangent should be drawn between consecutive curves to account for the time it takes for a driver to turn the steering wheel. In particular, there are 3 radii that fully define the fastest through path that are defined as “critical radii”. R1, the entry path radius, is the minimum radius on the fastest through path prior to the entrance line. R2, the circulating path radius, is the minimum radius on the fastest through path around the central island. R3, the exit path radius, is the minimum radius on the fastest through path into the exit. In the case of a vehicle, it is considered to have a width of 2 meters and to maintain a minimum clearance of 0.5 meters from the centerline of the roadway or a concrete curb, while also aligning itself with a painted edge line. Consequently, the centerline of the vehicle’s path is marked with specific distances from various geometric features as follows:
- 1.0 m from a painted edge line,
- 1.5 m from a concrete curb,
- 1.5 m from a roadway centerline.
- ➢
-
Parametric representation of the path: To describe the path through the roundabout, a parametric representation is used (Figure 3). In polar coordinates, where r is the radial distance from the center of the roundabout and θ is the angle relative to the horizontal axis, the path is expressed as:r(θ)= r0+a⋅θ2Here, r0 represents the initial distance from the roundabout, a governs the curvature of the path, and θ varies from the entry angle (θentry) to the exit angle (θexit).
- ➢
-
Least squares formulation: The objective is to minimize the error between the calculated path (pcalculated) and the desired path (pdesired). The objective function is the sum of squared differences:Where N is the number of sampled points along the through path.
- ➢
-
Levenberg-Marquardt Algorithm: The Levenberg-Marquardt algorithm is employed to minimize the objective. During iteration k, the model parameters (r0 and a) are updated using the Jacobian matrix of partial gradients. The updates are given by:Here, J(k)calculated is the Jacobian matrix in iteration k, λ(k) is the regularization parameter, and Δr and Δa are the parameter changes in iteration k.
- ➢
- Iteration and convergence: The Levenberg-Marquardt algorithm continues iteratively until acceptable convergence is achieved or a maximum number of iterations is reached. In each iteration, parameters are updated according to the algorithm’s formulas, and the objective is gradually reduced.
- ➢
- Path Model output: After completing the optimization with the Levenberg-Marquardt algorithm, optimal values of parameters r0 and a which define the fastest through path of the roundabout are obtained. These parameters constitute the optimized path for the autonomous vehicle. The final output of the path model consists of these optimal values, enabling the vehicle to safely and efficiently cross the roundabout while adhering to the NCHRP model of path [38].
3.2. Speed model
The uniform reference path generated for crossing a single-lane roundabout represents the main input for generating the specific speed model for that path.
A two-stage speed model is designed to reflect human driving behavior. In the first stage, information about the geometry of the reference path is used to create basic speed profile typical of the through maneuver in the case of a single-lane roundabout.
In particular, the most appropriate speed profile in response to the geometry of the path must take into account the sequence of 3 critical radii that characterizes the path itself (Figure 2). In these cases, in order to model the driving behavior, it is necessary to take into account that the decelerations at entry, due to the effect of the critical radius R1, occur from a distance from the entry that varies according to the caution adopted by the human drivers, and that the accelerations required to approach the circulation radius (R2) and the exit radius (R3) are also very different according to the behavior of the drivers when approaching these maneuvers.
To model this guidance pattern, the various path features are first marked to position the speed profile by referring to the NCHRP template described in section 3.1. In particular, the proposed MRoundabout speed model is based on the speed profile shown in the lower part of Figure 4, whose construction requires the following steps:
- 1)
- the entire path is divided into 3 main “Turning Regions”: TR1 starts at the point before entering the roundabout, from which the vehicle decelerates, and ends in the middle of the section passed under acceleration, between the first and second circular arcs of the path; TR2 starts at the end of the previous region and ends in the middle of the section that is passed under acceleration, between the second and third circular arcs of the path; TR3 starts at the end of the previous region and ends at the point where the user varies his speed (accelerates) after passing the last section with constant curvature of the crossing path;
- 2)
- for each of the “Turning Regions” the longitudinal distance Lsi is defined (i = 1,2,3) between the starting point of the region and the point where the speed value si is reached (with i =1, 2,3), which on average remains constant along the maneuver radius within the region itself;
- 3)
- for each of the “Turning Regions”, the longitudinal distance ΔSi (i = 1,2,3) is defined between the central point of the region and the point where the travel starts at constant speed si (i = 1, 2,3). Thus: ΔSi = TRi/2 - LSi;
- 4)
-
in addition:
- s0 = characteristic speed of the road before and after the roundabout. It could also be indicated by vertical signs, and for a particular design there may be other relationships. For example, a curve before the entrance (with radius R0) can determine the speed that can be reached at the entrance. An entry coming from a parking lot may have a much lower speed than an entry coming from a high-speed rural road, even with the same entry geometry [38]. Therefore, the speed s0 may be a constraint that the autonomous vehicle must learn;
- d01 = deceleration from speed s0 to speed s1 typical of the circumference of radius R1 within region TR1;
- a12 = acceleration from speed s1 to speed s2 typical of the circumference of radius R2 within region TR2;
- a23 = acceleration from speed s2 to speed s3 typical of the circumference of radius R3 within region TR3.
Finally, the formulation of the velocity profile {si} proposed to describe the crossing trajectory of a single-lane roundabout in parametric form:
Where:
- {r(θ)} describes the entire through path, and
- Q =[s0, s1, s2, s3, d01, a12, a23, ΔS1, ΔS2, ΔS3]T defines the shape of the speed profile.
Note that the proposed speed model (MRoundabout) potentially yields speed profiles with non-smooth (high value of longitudinal jerk) transition points connecting linear segments. To improve speed smoothing, the second step iteratively constrains the numerically estimated jerk until the maximum jerk value falls below a specific threshold (jerklon).
4. Model calibration
The presented model necessitates the calibration of numerous parameters using data obtained from human driving. Specifically, the path model is tasked with optimizing two criteria associated with the geometric attributes of the path through a roundabout: smoothness and the seamless connection between the three successive turning regions within the fastest crossing path. It is assumed that a typical human driving pattern inherently seeks to optimize these two aspects. Consequently, the adjustment of the path model (followed by subsequent learning) becomes unnecessary in such circumstances. As a result, this section is primarily dedicated to ascertaining the parameters for the MRoundabout speed model.
The parameters for the MRoundabout model, denoted as Q, can be determined through an optimization process aimed at minimizing the least square error between the MRoundabout model and the human driving data:
In this equation, {sihuman} represents the dataset comprising human driving speeds along the fastest through path. The parameter si (where i = 1, 2, 3) in Q can be readily derived by examining the human driving data for fitting purposes. The previous equation is then employed to determine the remaining six parameters in Q.
The “argmin” function used in the equation signifies the argument that minimizes the subsequent expression. In this context, it identifies the set of parameters Q (denoted as Q^) that results in the smallest least square error when comparing the MRoundabout model’s predictions with the observed human driving data. This optimization process effectively tunes the parameters of the MRoundabout model to align it as closely as possible with real-world human driving behavior along the specified path.
In Figure 5, an illustrative through maneuver in a roundabout, utilizing the aforementioned optimization routine, is presented. The human driving data concerning the roundabout crossing maneuver illustrated in the figure were obtained from the dataset collected as a result of the experimental study described in Section 5 of this manuscript. It is evident that the profiles generated by the model align quite closely with the actual speed data collected. Notably, the incorporation of jerk smoothing further enhances the precision and faithfulness of this alignment, as evidenced by the distinctive blue curve. This underscores the effective adaptation of the proposed speed model (MRoundabout) to human driving behavior, even though it cannot fully replicate it.
5. Experimental investigation
To substantiate the claims made in this paper, an experimental investigation was conducted. The purpose of this investigation is twofold: 1) to explain the results of parameter learning for the proposed speed model (MRoundabout); 2) to evaluate the MRoundabout by comparing the results of the model with actual human driving data.
5.1. Selection of roundabouts
The roundabouts of the experimental investigation are located in Italy in the district of San Giovanni Galermo (northwest of Catania) and in the municipality of Mascalucia (which is part of the metropolitan city of Catania and about 12 km from it). In the area of S. Giovanni Galermo are located 3 of the 5 roundabouts (respectively named “Roundabout n.1”, “Roundabout n.2” and “Roundabout n.3”). These roundabouts are arranged along the same route in a rather homogeneous territorial context. The other two roundabouts (“Roundabout n.4” and “Roundabout n.5”), located in the municipality of Mascalucia, are also arranged one after the other and are located along the Provincial Road 10 (SP10), the so-called “Via Alcide de Gasperi”, which is used by many inhabitants of the neighboring municipalities.
The geometrical characteristics of the roundabouts are shown in Table 1. In detail, the following parameters are given: Number of legs, diameter, width of the circulatory roadway. In addition, the widths of the entry leg and exit leg in Table 1 refer to the legs of interest for the crossing paths analyzed in this study.
Figure 6 shows the aerial photographs of the five roundabouts subject of the experimental investigation.
5.2. Data collection
The experimental study on crossing maneuvers in roundabouts was conducted with a sample of 15 drivers between the ages of 23 and 62 (7 men and 8 women).
The drivers were recruited from the University of Catania. In particular, an advertisement was published on the website of the Department of Civil Engineering and Architecture, which included information about the study and a questionnaire to recruit the participants. Participants were selected from all those who responded to the advertisement. Drivers were required to be between the ages of twenty-one and sixty-five and to have held a driver’s license for at least three years.
Participants gave their informed consent to participate in the experiment. They were informed that all data collected would be kept confidential and used for research purposes only. Participants were also informed that their driving skills would not be assessed and that the only purpose of the study was to collect data on paths traveled (trajectories and speed). The study was conducted in accordance with the Declaration of Helsinki and the protocol was approved by the DISS - Center for Road Safety of the University of Parma (decision of the Steering Committee—prot. 211117/2021 of February 24, 2021).
The 15 test drivers performed the planned routes in summer and at low-traffic times, i.e. in the time windows between 10:00 and 11:00 a.m. and between 3:00 and 4:00 p.m., so that the conditions for performing the maneuvers were always little affected by interactions with other vehicles. Survey data (position, direction and curvature of the path, longitudinal speed and accelerations) were collected using a tracking system based on the differential GPS placed in the center of the rear axle of the vehicle and used from time to time by the driver involved in the test. It should be noted that each driver performed the test using their own vehicle so that their behavior was as natural as possible. The surveys, conducted in the time windows indicated above, spanned several days until the complete database of all 15 drivers was available. Each driver performed all the crossing maneuvers indicated in Table 2. In cases where the maneuvers were affected by other vehicles or external events, drivers were asked to repeat the maneuver. A total of 9 trajectories per driver were validly recorded, for a total of 135. In detail:
- ➢
- each test driver performed all 8 planned crossing maneuvers. The resulting 120 trajectories were considered for the parameter learning phase of the model (see Section 5.3);
- ➢
- each test driver was asked to repeat one maneuver from those already performed. In this way, the parameters for an additional 15 trajectories were acquired to be used for the evaluation phase of the model (seeSection 5.4). These additional maneuvers are adequately specified in Table 2.
6. Results and discussions
6.1. Learning results and discussion
The proposed speed model incorporates parameters such as s1, s2, s3, d01, a12, a23, ΔS1, ΔS2, ΔS3, all contingent upon the reference path that underpins the model, as elucidated in the paper’s initial section. The objective of this study is to discern and unveil the fundamental attributes intrinsic to the human driving model. This facilitates the adjustment of the theoretical speed model, referred to as MRoundabout, to accommodate the fluctuations in human behavior observed during navigation through the three turning regions delineated within the path model.
Consequently, it becomes imperative to identify the nine parameters within the MRoundabout speed model that can be tailored to align with the driving conditions that result from the approaches taken by human drivers when maneuvering through various crossing paths. To achieve this, a statistical regression methodology was employed, wherein the nine parameters for model adaptation, denoted by an asterisk, were statistically derived using data from the experimental study outlined in prior sections.
Symbolically, this can be represented as:
Q* = [s*1, s*2, s*3, d*01, a*12, a*23, Δ*S1, Δ*S2, Δ*S3]T
From an operational point of view, the learning took place as follows:
- 1)
- for each of the 120 crossing paths experimentally performed by the test drivers, the three characteristic radii of the path (R1, R2 e R3) that characterize the curvature of the three turning regions (TR1, TR2 e TR3) were evaluated, again as a function of the geometric characteristics of the roundabouts;
- 2)
- with respect to each of the trajectories obtained through the experimental study, the average speed values (s1, s2, s3) corresponding to the radii that make up the turning regions were also obtained;
- 3)
- for each trajectory, the average values of the deceleration (d01) characteristic of the first turning region and of the accelerations (a12 and a13) for the two following turning regions were calculated;
- 4)
- the distances ΔS1, ΔS2 and ΔS3 were also determined starting from the data of the trajectories obtained experimentally, after determining for each trajectory the extent of each turning region and the transition points between the sections covered with deceleration/acceleration and those covered with constant speed;
- 5)
- the nine parameters of the speed model evaluated experimentally for each of the three curve regions were plotted in different scatter plots as a function of the values of the characteristic radii;
- 6)
- linear regressions were used to learn the correlations between the parameters of interest and, consequently, to explain the formulations describing the variability of the statistically learned parameters.
Figure 7 shows, for each of the 3 turning regions, the scatter plots on the 9 parameters assessed after the experimental tests and the corresponding regression lines with the associated R2 determination coefficients.
Below are the various representative formulations of the linear regressions obtained for the statistically learned parameters:
The analyzed parameters showed correlations ranging from very strong to very weak.
The closer their coefficients of determination (R2) are to 1, the stronger linearity can be concluded. Upon examination of scatter plots for each parameter (Figure 7), certain discernible human driving patterns emerge, which can be statistically elucidated:
- ➢
- Strong Linearity in s1, s2, and s3: The analysis shows a strong linear correlation between the speeds s1, s2, and s3 and the radii of curvature characterizing the three turning regions. In other words, as logically expected, as the radius of curvature decreases, the speed of execution of the maneuver also decreases [23,24,25]. Specifically, it is observed that the highest degree of linearity is evident at speed s1 when the radius values R1 fall within the range of 25 meters to 28 meters (with a variation of ΔR1 = 3 meters). This corresponds to a speed change ranging from 23 km/h to 40 km/h (with a variation of ΔS1 = 17 km/h). With respect to speed s2, the strongest linearity occurs for values of R2 between 34 m and 44 m (ΔR2 = 10 m), where the speed varies between 27 km/h and 46 km/h (ΔS2 = 19 km/h). When examining speed s3, it becomes evident that no pronounced linearity exists within the spectrum of radius values R3 (with a total variation of ΔR3 equivalent to 21 meters). As a result, the speed variance in the third turning region spans the complete range between 25 km/h and 51 km/h (with a total variation of ΔS3 equal to 26 km/h). Thus, it is noteworthy that the ΔS and ΔR intervals, which are linked to the growing significance of the correlations between radii and speed, exhibit substantial expansion as the final turning region is approached. This means that road users feel more influenced on the first approach and therefore adopt a more cautious behavior. Conversely, drivers approaching the last part of the trajectory (the exit part) feel less constrained and therefore tend to adopt variable speeds within a very wide range.
- ➢
- Low Linearity in d01, a12, and a23: For the MRoundabout model, there is a low level of linearity observed in the parameters d01, a12, and a23. Moreover, the values of the coefficients of determination R2 for all three correlations are almost identical in the scattering diagrams (d, e, and f) shown in Figure 7. A closer analysis of the three diagrams also shows that in none of the diagrams is there such a density of data that highlights a stronger linearity in one part of the diagram compared to other parts. This result suggests that accelerations/decelerations can vary significantly and may be influenced by factors that are hard to quantify, such as the driver’s mood. This finding aligns with the argument presented in [39].
- ➢
- Weak Linear Correlation in Δs1, Δs2, and Δs3: The analysis shows a weak linear correlation between Δs1, Δs2, Δs3, and their respective reference radii. This indicates that as the radius of curvature of the crossing trajectory decreases drivers tend to behave more cautiously by slowing down earlier. Essentially, when faced with smaller radii, human drivers tend to exhibit more conservative driving behavior. This also means that drivers are less predictable when navigating through turning regions with small radii. These considerations are stronger in the case of turning maneuvers that take place in the first region. Indeed, diagram 7-g shows a lower dispersion of the data and a higher R2 coefficient compared to the behavioral situations described in diagrams 7-h and 7-i. This confirms that all the correlations found describe more accurately the human behavior in the first approach phase to roundabouts, i.e. in the entry phase.
6.2. Speed model evaluation and discussion
The evaluation of the learned model, known as MRoundabout, involves the generation of speed plans and their comparison with the behavior observed in 15 human driving processes learned during the experimental study phase (as described in section 5.2, the test drivers were used for further trajectory measurements, in addition to the 120 whose results were used for learning the parameters). Parameter Q, representing this model, is specifically tailored to capture the characteristics of navigation through roundabouts. The objective of this evaluation is to gauge the model’s ability to replicate human driving behavior.
In Figure 8, the outcomes of the comparison between the speed plans generated by the MRoundabout model and the driving data of test drivers No. 3, No. 10, No. 13, and No. 14 are presented. The remarkable alignment between the speed profiles generated by the model and the actual profiles is readily apparent. Notably, for drivers 3 and 10, the congruence between the speed profiles derived from the model and the real counterparts is nearly flawless. Conversely, for drivers No. 13 and No. 14, there are more substantial deviations between the two curves, even if the degree of overlap is still very considerable.
This study highlights an important aspect: despite the difficulties of achieving a perfect one-to-one match with individual human data points, traffic-free reference plans are successfully generated.
These reference plans are designed to capture the essential characteristics of human behavior during roundabout crossing maneuvers, albeit in a statistical sense. In other words, while the generated plans may not precisely replicate any specific human instance, they encompass the core features commonly observed in such situations.
Furthermore, the use of the learned model MRoundabout offers significant advantages in the context of autonomous vehicle planning. By incorporating statistical representations of human-like behavior into the planning algorithms, the resulting plans are characterized by fluidity and predictability. This means that autonomous vehicles can navigate roundabout crossings in a manner that not only aligns with common human patterns but also ensures a smooth and predictable driving experience.
In summary, while the generated plans may not achieve perfect matches with random human data, the study demonstrates the ability to capture essential human driving characteristics statistically. This contributes to the development of autonomous vehicle planning systems that prioritize smooth and predictable driving maneuvers during roundabout crossings, ultimately enhancing both safety and the overall driving experience for passengers and other road users.
7. Conclusions
This research is an exploration into enhancing the user experience within the domain of autonomous driving. The primary objective is the development of a planning model that operates without the influence of traffic, aiming to mimic human driving behavior, especially when navigating roundabouts.
The central focus of this research primarily revolves around traffic-free planning, which entails a deep understanding of how individuals navigate roundabouts in isolation from other vehicles. To accomplish this, a trajectory model has been introduced as a solution to accurately represent the path that a vehicle takes within a roundabout, taking into account variations in speed. The process involves the identification of the various parameters governing this trajectory model. This undertaking is structured as a least square optimization problem, aiming to derive parameter values that align optimally with empirical data observations. Subsequently, statistical regression methodologies are employed to generalize these parameters. This stage serves to define the speed model (referred to as MRoundabout) and assesses the sensitivity of each parameter to the inherent unpredictability that characterizes human driving behavior. The model’s effectiveness is then assessed by subjecting it to a new dataset, with the goal of gauging its consistency in generating plans that closely emulate human driving behavior within roundabouts.
However, it is of paramount importance to acknowledge a substantial limitation inherent in this study. The model’s reference speed is solely determined by the geometric attributes of the roundabout and does not account for external factors, such as weather conditions or the state of the road surface, which can significantly impact human driving behavior. As a result, the model’s adaptability to real-world driving scenarios may be subject to constraints.
In terms of future research directions, the authors intend to outline several procedural and operational initiatives. Foremost among these is a clear intention to transition from a theoretical research concept to practical implementation. This entails the integration of the model into the planning system of an operational autonomous vehicle to contribute to tangible advancements in autonomous driving technology. Additionally, there is a recognized need to explore the development of planning models that take into account the presence of traffic and are designed to seamlessly adapt to dynamic environments where other vehicles are concurrently in operation. This adaptability is particularly crucial in scenarios where effective vehicular interactions and decision-making are fundamental aspects of a comprehensive and adaptable autonomous driving system.
These proposed intentions underscore the significance of bridging the divide between research endeavors and practical implementation. They emphasize the urgency of addressing the intricate complexities that characterize real-world driving scenarios, characterized by varying traffic dynamics and dynamic environments. The pursuit of these intentions aims to advance the ultimate objective of creating a resilient and versatile autonomous driving system that enhances safety and enriches the overall user experience.
Author Contributions
Conceptualization, N.D. and S.L.; methodology, N.D. and S.L.; software, N.D. and S.L.; validation, S.L.; formal analysis, N.D.; investigation, N.D. and S.L.; resources, N.D. and S.L.; data curation, S.L.; writing—original draft preparation, N.D. and S.L.; writing—review and editing, N.D. and S.L.; visualization, N.D.; supervision, S.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
The study was conducted according to the guidelines of the Declaration of Helsinki, and the protocol was approved by the DISS-Center for Road Safety of the University of Parma (Deliberation of the Steering Committee—prot. 211117/2021 of February 24, 2021).
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study. Written informed consent has been obtained from the patient(s) to publish this paper.
Data Availability Statement
The data presented in this study are available on request from the corresponding author. The data are not publicly available due to confidentiality issues.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Boggs, A. M.; Arvin, R.; Khattak, A. J. Exploring the who, what, when, where, and why of automated vehicle disengagements. Accid. Anal. & Prev. 2020, 136, 105406. [CrossRef]
- Parkin, J.; Clark, B.; Clayton, W.; Ricci, M.; Parkhurst, G. Understanding interactions between autonomous vehicles and other road users: A literature review. 2016. Project Report. University of the West of England, Bristol. https://uwe-repository.worktribe.com/OutputFile/922231 (accessed on 28 June 2023).
- Xu, D.; Ding, Z.; He, X.; Zhao, H.; Moze, M.; Aioun, F.; Guillemard, F. Learning From Naturalistic Driving Data for Human-Like Autonomous Highway Driving. IEEE Trans. Intell. Transp. Syst. 2020, 1–14. [CrossRef]
- Grigorescu, S.; Trasnea, B.; Cocias, T.; Macesanu, G. A survey of deep learning techniques for autonomous driving. J. Field Robot. 2020, 37 (3), 362–386. [CrossRef]
- Farkas, Z.; Mihály, A.; Gáspár, P. Model Predictive Control Method for Autonomous Vehicles in Roundabouts. Machines 2023, 11 (1), 75. [CrossRef]
- Wang, C.; Wang, Y.; Peeta, S. Cooperative Roundabout Control Strategy for Connected and Autonomous Vehicles. Appl. Sci. 2022, 12 (24), 12678. [CrossRef]
- Wang, W.; Jiang, L.; Lin, S.; Fang, H.; Meng, Q. Imitation learning based decision-making for autonomous vehicle control at traffic roundabouts. Multimedia Tools Appl. 2022. [CrossRef]
- Cao, H.; Zöldy, M. An Investigation of Autonomous Vehicle Roundabout Situation. Period. Polytech. Transp. Eng. 2019, 48 (3), 236–241. [CrossRef]
- Paden, B.; Cap, M.; Yong, S. Z.; Yershov, D.; Frazzoli, E. A Survey of Motion Planning and Control Techniques for Self-Driving Urban Vehicles. IEEE Trans. Intell. Veh. 2016, 1 (1), 33–55. [CrossRef]
- Rodrigues, M.; McGordon, A.; Gest, G.; Marco, J. Adaptive tactical behaviour planner for autonomous ground vehicle. In 2016 UKACC 11th International Conference on Control (CONTROL), Belfast, United Kingdom, 31 August–2 September 2016; IEEE, 2016. [CrossRef]
- Gu, T.; Dolan, J. M. Toward human-like motion planning in urban environments. In 2014 IEEE Intelligent Vehicles Symposium (IV), MI, USA, 8–11 June 2014; IEEE, 2014. [CrossRef]
- Dong, C.; Dolan, J. M.; Litkouhi, B. Interactive ramp merging planning in autonomous driving: Multi-merging leading PGM (MML-PGM). In 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, 16–19 October 2017; IEEE, 2017. [CrossRef]
- de Beaucorps, P.; Streubel, T.; Verroust-Blondet, A.; Nashashibi, F.; Bradai, B.; Resende, P. Decision-making for automated vehicles at intersections adapting human-like behavior. In 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; IEEE, 2017. [CrossRef]
- Rano, I.; Edelbrunner, H.; Schoner, G. Naturalistic lane-keeping based on human driver data. In 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast City, Australia, 23–26 June 2013; IEEE, 2013. [CrossRef]
- Geng, X.; Liang, H.; Xu, H.; Yu, B.; Zhu, M. Human-driver speed profile modeling for autonomous vehicle’s velocity strategy on curvy paths. In 2016 IEEE Intelligent Vehicles Symposium (IV), Gotenburg, Sweden, 19–22 giugno 2016; IEEE, 2016. [CrossRef]
- Rodrigues, M.; Gest, G.; McGordon, A.; Marco, J. Adaptive behaviour selection for autonomous vehicle through naturalistic speed planning. In 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, 16–19 October 2017; IEEE, 2017. [CrossRef]
- Fakirah, M.; Leng, S.; Chen, X.; Zhou, J. Visible light communication-based traffic control of autonomous vehicles at multi-lane roundabouts. EURASIP J. Wirel. Commun. Netw. 2020, 2020 (1). [CrossRef]
- Martin-Gasulla, M.; Elefteriadou, L. Traffic management with autonomous and connected vehicles at single-lane roundabouts. Transp. Res. 2021, 125, 102964. [CrossRef]
- Sackmann, M.; Leemann, T.; Bey, H.; Hofmann, U.; Thielecke, J. Multi-Step Training for Predicting Roundabout Traffic Situations. In 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 settembre 2021; IEEE, 2021. [CrossRef]
- Leonardi, S.; Distefano, N.; Pulvirenti, G. Italians’ public opinion on road roundabouts: A web based survey. Transp. Res. Procedia 2020, 45, 293–300. [CrossRef]
- Rella Riccardi, M.; Augeri, M. G.; Galante, F.; Mauriello, F.; Nicolosi, V.; Montella, A. Safety Index for evaluation of urban roundabouts. Accid. Anal. & Prev. 2022, 178, 106858. [CrossRef]
- Distefano, N.; Leonardi, S.; Consoli, F. Drivers’ Preferences for Road Roundabouts: A Study based on Stated Preference Survey in Italy. KSCE J. Civ. Eng. 2019, 23 (11), 4864–4874. [CrossRef]
- Ciampa, D.; Diomedi, M.; Giglio, F.; Olita, S.; Petruccelli, U.; Restaino, C. Effectiveness of Unconventional Roundabouts in the Design of Suburban Intersections. European transport 2020, 1-16.
- Pulvirenti, G.; Distefano, N.; Leonardi, S.; Tollazzi, T. Are Double-Lane Roundabouts Safe Enough? A CHAID Analysis of Unsafe Driving Behaviors. Safety 2021, 7 (1), 20. [CrossRef]
- Distefano, N.; Pulvirenti, G.; Leonardi, S.; Tollazzi, T. Unsafe Driving Behaviours at Single-Lane Roundabouts: Empirical Evidence from CHAID Method. In Research Methods in Modern Urban Transportation Systems and Networks; Springer International Publishing: Cham, 2021; pp 145–163. [CrossRef]
- Rodrigues, M.; McGordon, A.; Gest, G.; Marco, J. Autonomous Navigation in Interaction-Based Environments: A Case of Non-Signalized Roundabouts. IEEE Trans. Intell. Veh. 2018, 3 (4), 425–438. [CrossRef]
- Wang, W.; Nguyen, Q. A.; Ma, W.; Wei, J.; Hing Chung, P. W.; Meng, Q. Multi-Grid based decision making at Roundabout for Autonomous Vehicles. In 2019 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Cairo, Egypt, 4–6 September 2019; IEEE, 2019. [CrossRef]
- Medina-Lee, J. F.; Godoy, J.; Artunedo, A.; Villagra, J. Speed Profile Generation Strategy for Efficient Merging of Automated Vehicles on Roundabouts With Realistic Traffic. IEEE Trans. Intell. Veh. 2022, 1–15. [CrossRef]
- Deveaux, D.; Higuchi, T.; Ucar, S.; Wang, C.-H.; Harri, J.; Altintas, O. Extraction of Risk Knowledge from Time To Collision Variation in Roundabouts. In 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, September 19–22, 2021; IEEE, 2021. [CrossRef]
- Xu, K.; Cassandras, C. G.; Xiao, W. Decentralized Time and Energy-Optimal Control of Connected and Automated Vehicles in a Roundabout With Safety and Comfort Guarantees. IEEE Trans. Intell. Transp. Syst. 2022, 1–16. [CrossRef]
- García Cuenca, L.; Sanchez-Soriano, J.; Puertas, E.; Fernandez Andrés, J.; Aliane, N. Machine Learning Techniques for Undertaking Roundabouts in Autonomous Driving. Sensors 2019, 19 (10), 2386. [CrossRef]
- Abnili, M. Z.; Azad, N. L. On-line Situational Awareness for Autonomous Driving at Roundabouts using Artificial Intelligence. J. Mach. Intell. Data Sci. 2021. [CrossRef]
- Chalaki, B.; Beaver, L. E.; Remer, B.; Jang, K.; Vinitsky, E.; Bayen, A. M.; Malikopoulos, A. A. Zero-Shot Autonomous Vehicle Policy Transfer: From Simulation to Real-World via Adversarial Learning. In 2020 IEEE 16th International Conference on Control & Automation (ICCA), Singapore, Singapore, October 9–11, 2020; IEEE, 2020. [CrossRef]
- Bosankić, I.; Mehmedović, L. B. Cooperative Intelligence in Roundabout Intersections Using Hierarchical Fuzzy Behavior Calculation of Vehicle Speed Profile. MATEC Web Conf. 2016, 81, 01008. [CrossRef]
- Farkas, Z.; Mihály, A.; Gáspár, P. MPC Control Strategy for Autonomous Vehicles Driving in Roundabouts. In 2022 30th Mediterranean Conference on Control and Automation (MED), Vouliagmeni, Greece, June 28–July 1, 2022; IEEE, 2022. [CrossRef]
- Hidalgo, C.; Lattarulo, R.; Perez, J.; Asua, E. Hybrid trajectory planning approach for roundabout merging scenarios. In 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), Graz, Austria, November 4–8, 2019; IEEE, 2019. [CrossRef]
- Cao, H.; Zoldy, M. MPC Tracking Controller Parameters Impacts in Roundabouts. Mathematics 2021, 9 (12), 1394. [CrossRef]
- Crown, R. B.; Guichet, B.; Knudsen, J.; Isebrands, H.; O’Brien, A.; Johnson, M.; Tiesler, C.; Bansen, J.; Lyon, C.; Persaud, B.; Rodegerdts, L.; Hallmark, S.; Moule, M.; Myers, E. Roundabouts - An Informational Guide (2nd Edition): (NCHRP Report 672); Transportation Research Board: 2010. https://nacto.org/docs/usdg/nchrprpt672.pdf (accessed on 26 June 2023).
- Markelic, I.; Kjaer-Nielsen, A.; Pauwels, K; Jensen, L.B.W.; Chumerin, N.; Vidugiriene, A.; Tamosiunaite, M.; Rotter, A.; Hulle, M.V.; Kruger, N.; Worgotter, F. The driving school system: learning automated basic driving skills from a teacher in a real car. IEEE Trans. Intell. Transp. Syst. 2011, 12(4), 1135–1146. [CrossRef]
Figure 1.
Framework of the proposed analysis.
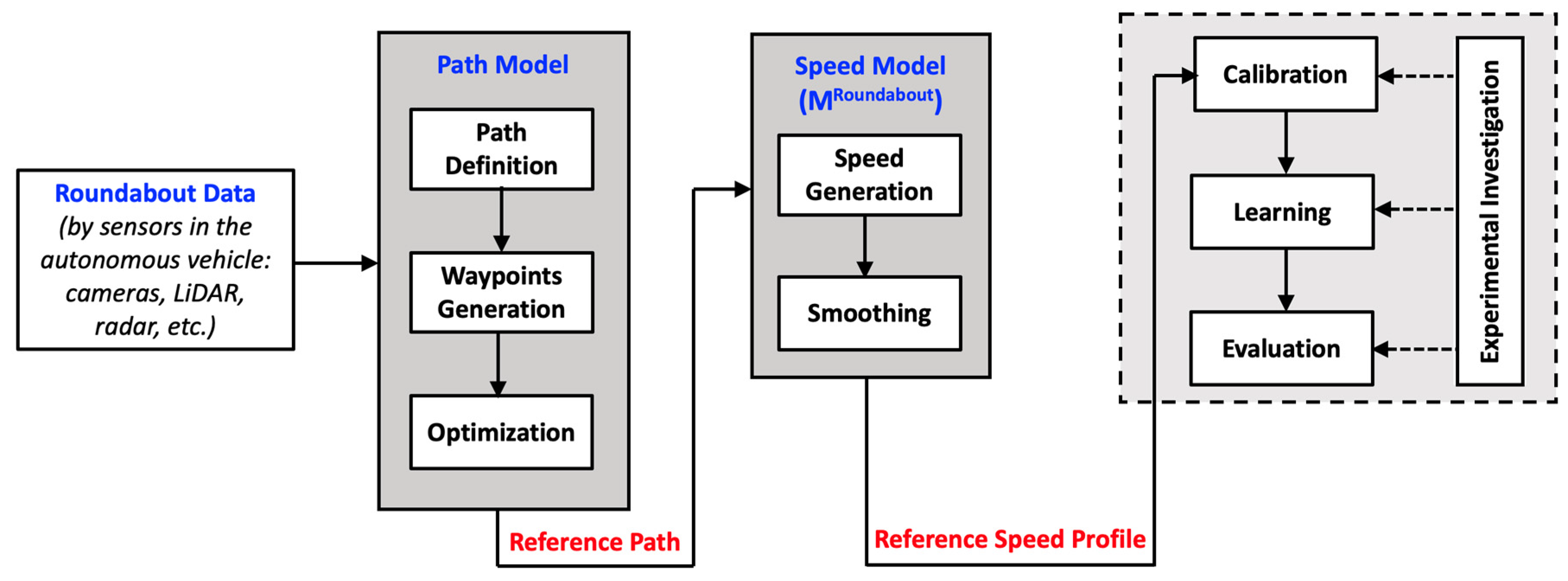
Figure 2.
Construction of the fastest through path according to the NCHRP model. In this example: a = 1.0 m, b = 1.5 m, c = 1.5 m.
Figure 2.
Construction of the fastest through path according to the NCHRP model. In this example: a = 1.0 m, b = 1.5 m, c = 1.5 m.
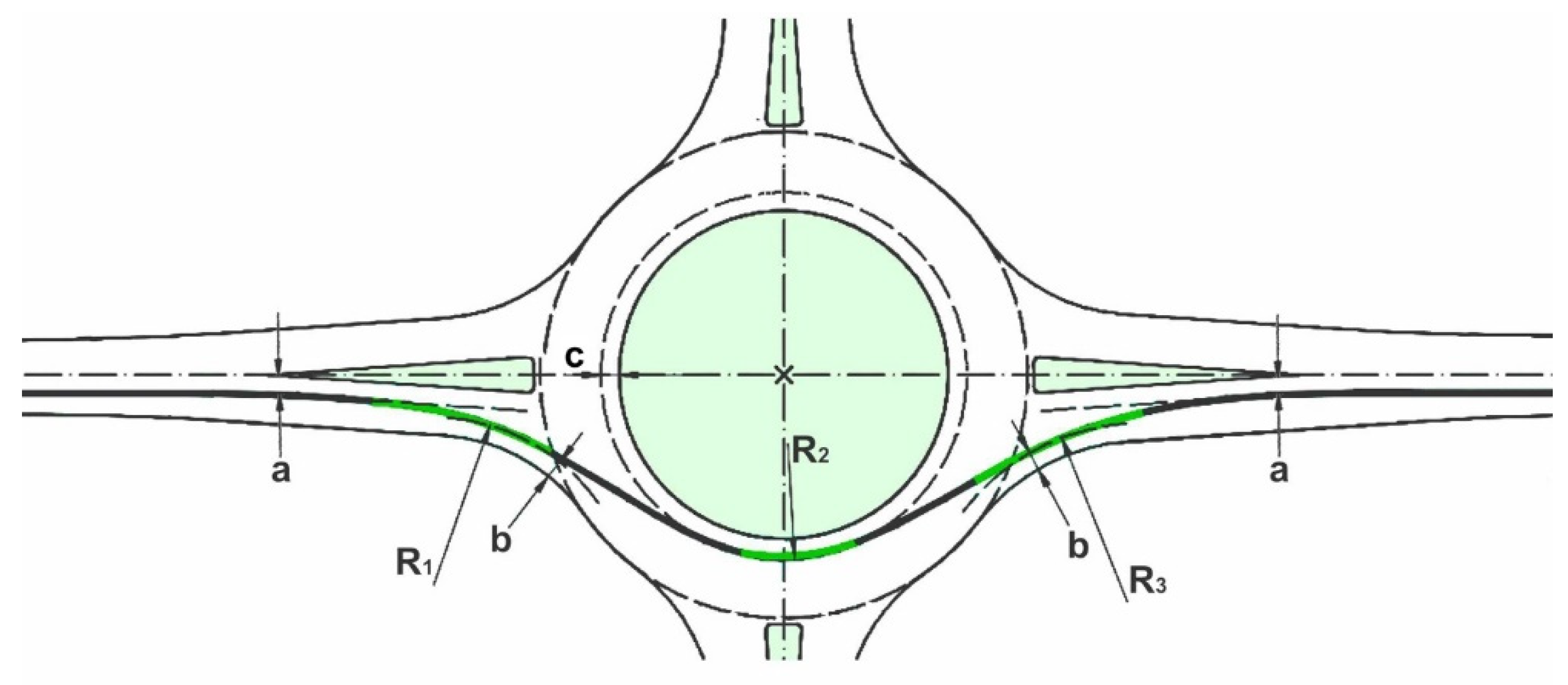
Figure 3.
Parametric representation of the fastest through path.
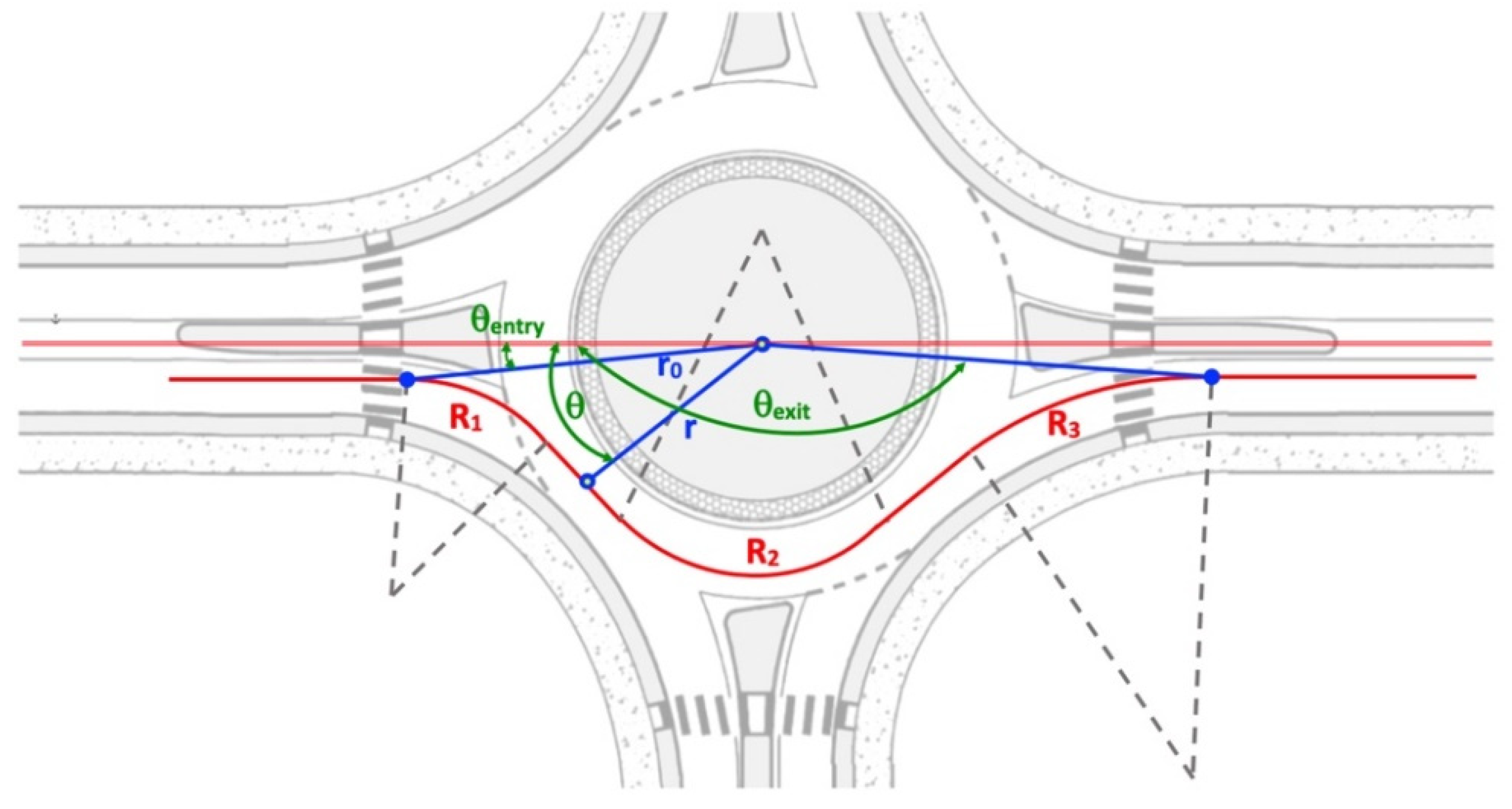
Figure 4.
Speed model (MRoundabout) to describe the speed profile during the crossing maneuver of a single-lane roundabout.
Figure 4.
Speed model (MRoundabout) to describe the speed profile during the crossing maneuver of a single-lane roundabout.
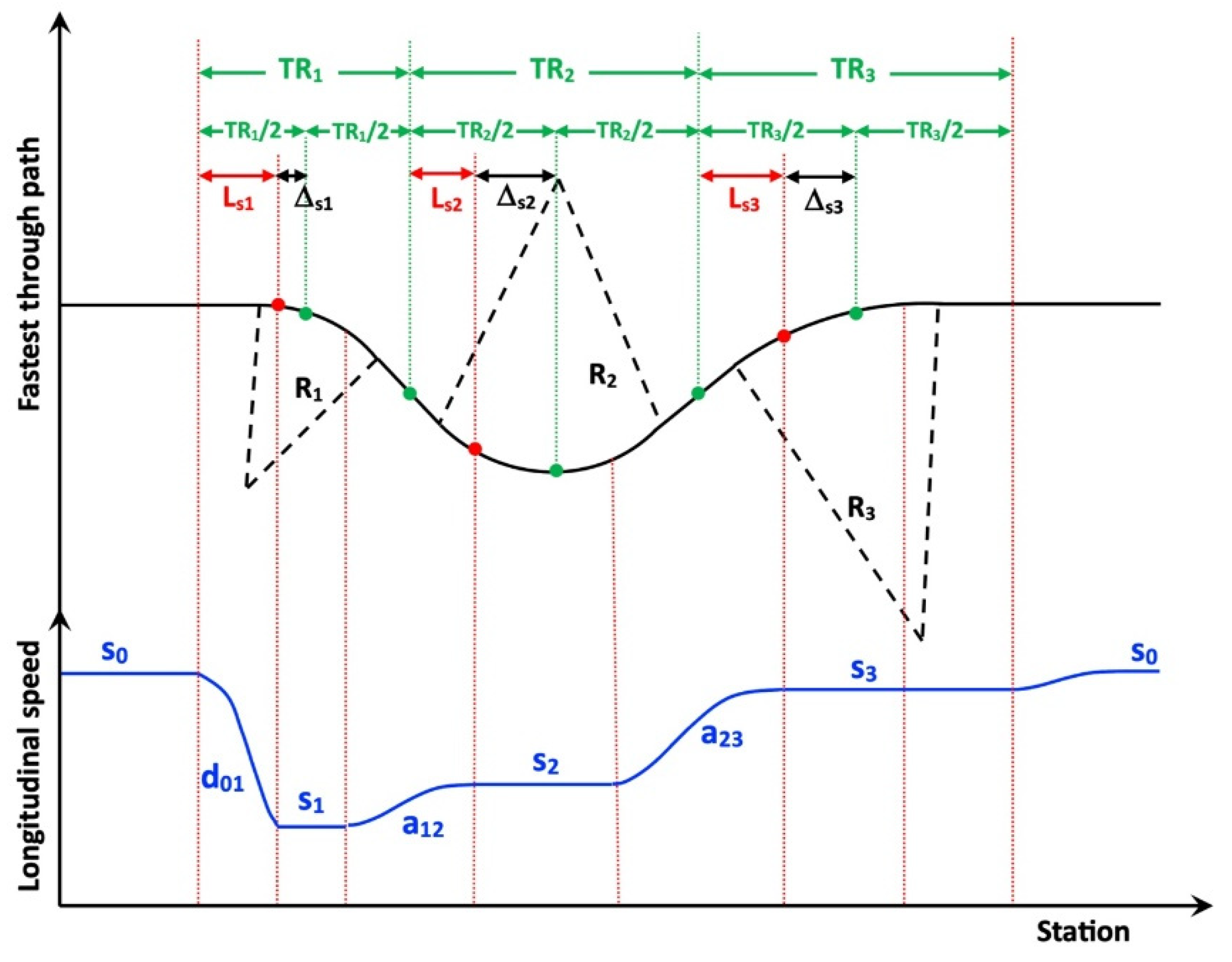
Figure 5.
Example of fitting a speed profile by the proposed model (MRoundabout).
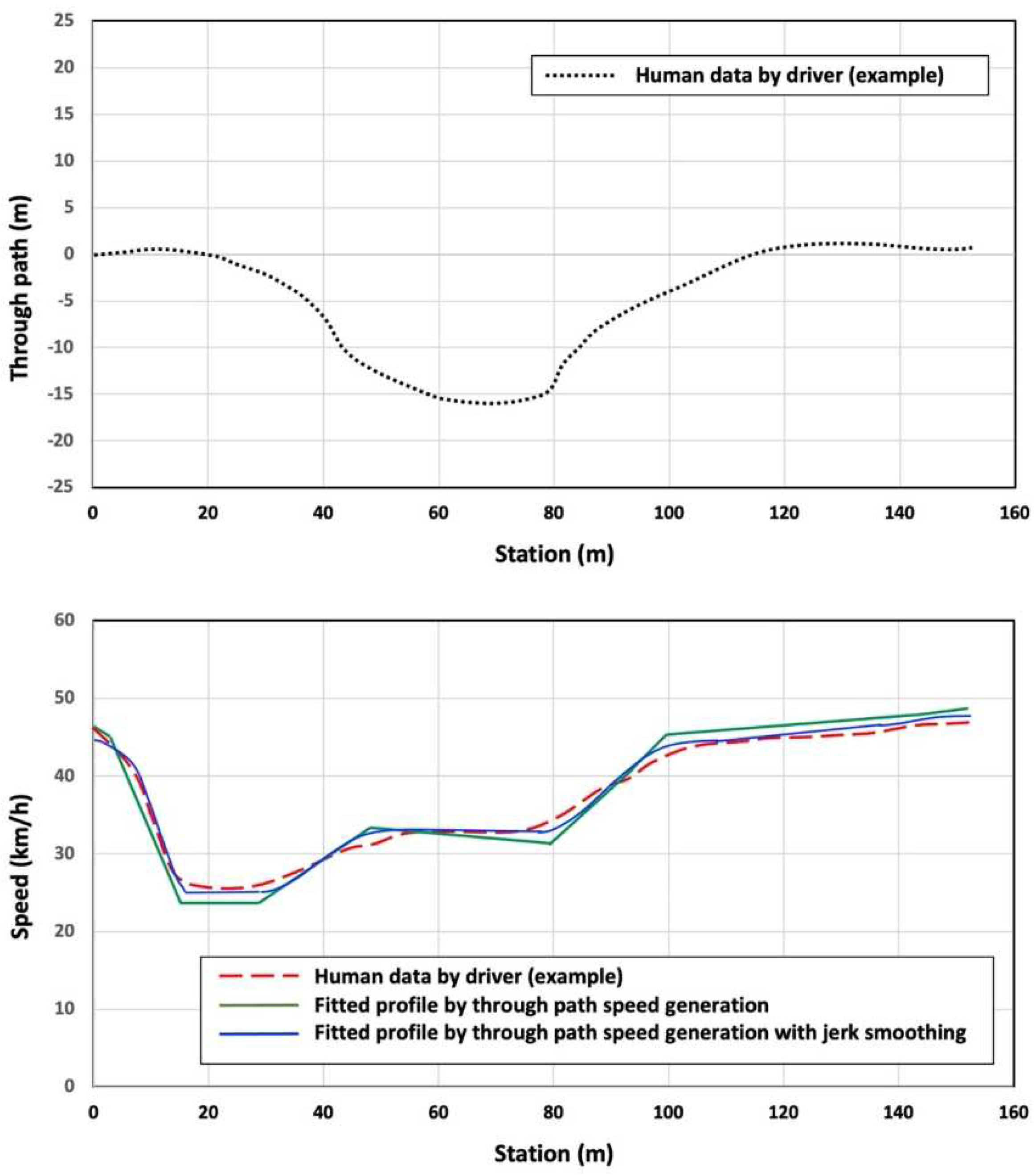
Figure 6.
Aerial photographs of the 5 roundabouts subject of the experimental investigation.

Figure 7.
Scattering plot of the speed model MRoundabout parameters. From subfigure (a) to (i), blue symbols are the scattered parameter values after model fitting. Black lines are the results after linear regression.
Figure 7.
Scattering plot of the speed model MRoundabout parameters. From subfigure (a) to (i), blue symbols are the scattered parameter values after model fitting. Black lines are the results after linear regression.
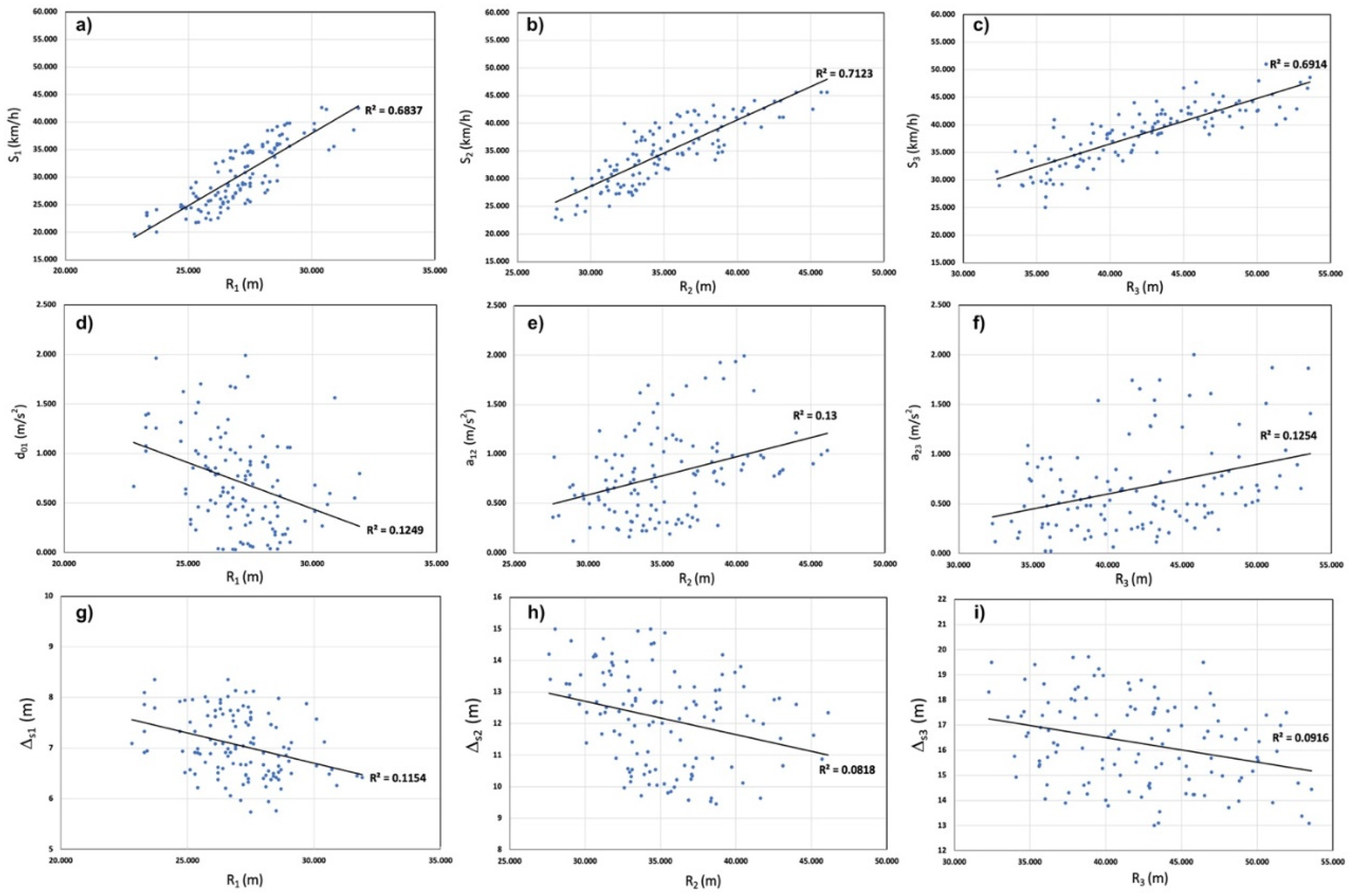
Figure 8.
Learned speed model evaluation results. In the subfigures from (a) to (d), some emblematic examples are shown for the comparison between four generated speed plans and as many human driving processes.
Figure 8.
Learned speed model evaluation results. In the subfigures from (a) to (d), some emblematic examples are shown for the comparison between four generated speed plans and as many human driving processes.
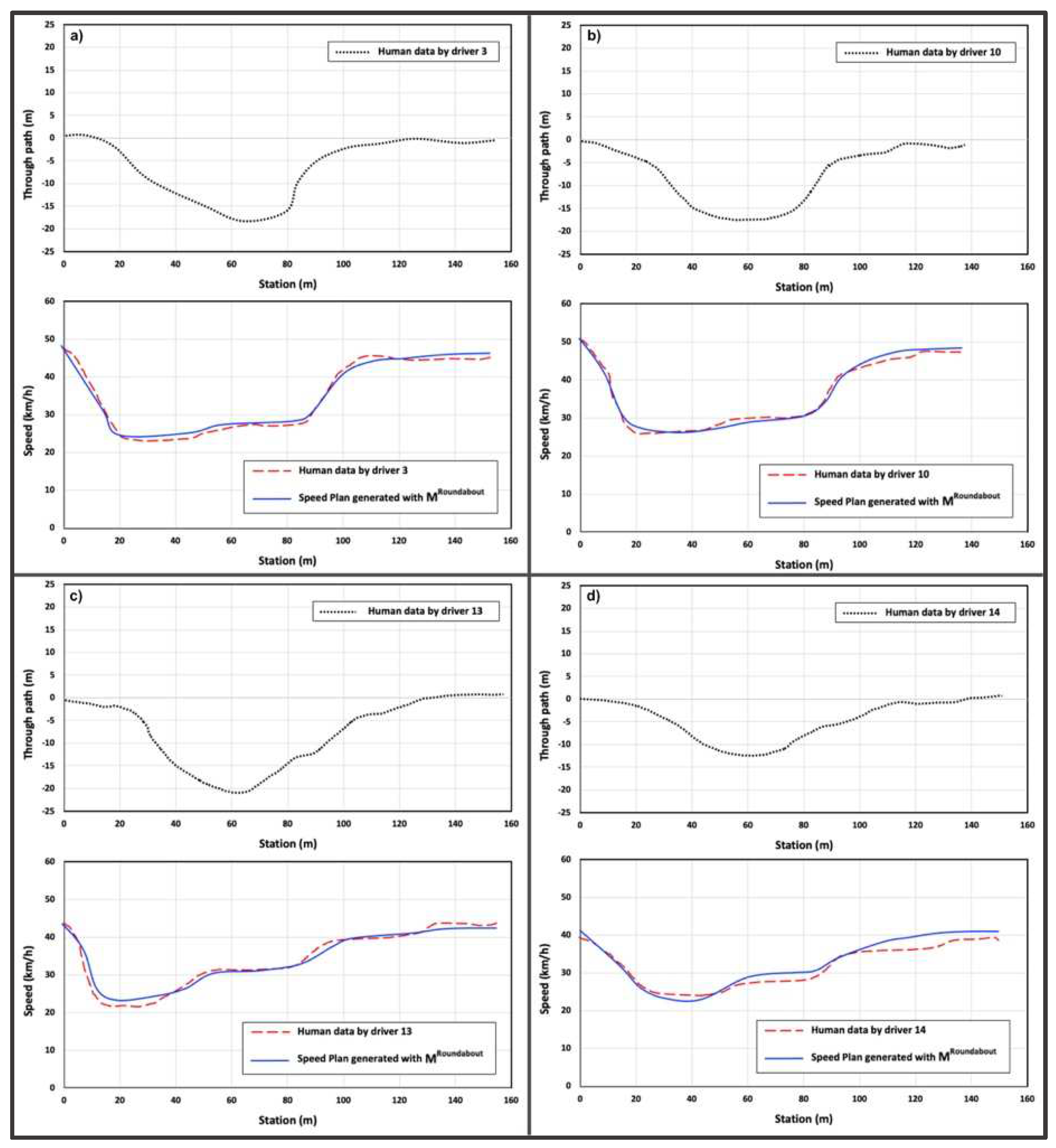

Table 1.
Geometrical characteristics of the roundabouts subject of the experimental investigation.
| Roundabout | Through Path | Number of legs | Diameter (m) | Circulatory roadway width (m) | Entry width (m) | Exit width (m) |
| 1 | Leg A – Leg B | 3 | 40 | 6.70 | 3.70 | 4.10 |
| 2 | Leg C – Leg A | 3 | 30 | 5.50 | 3.40 | 3.70 |
| 3 | Leg B – Leg D | 4 | 40 | 7.50 | 3.70 | 3.90 |
| Leg D – Leg B | 3.60 | 4.50 | ||||
| 4 | Leg B – Leg D | 4 | 35/33 | 7.00 | 4.30 | 4.70 |
| Leg D – Leg B | 4.30 | 4.70 | ||||
| 5 | Leg B – Leg D | 4 | 35 | 8.00 | 4.20 | 5.10 |
| Leg D – Leg B | 4.40 | 6.60 |
Table 2.
Main data from the experimental investigation.
| Roundabout | Through path | Number of trajectories acquired | |
| For learning | For evaluation | ||
| 1 | Leg A – Leg B | 15 | 1 |
| 2 | Leg C – Leg A | 15 | 2 |
| 3 | Leg B – Leg D | 15 | 2 |
| Leg D – Leg B | 15 | 1 | |
| 4 | Leg B – Leg D | 15 | 3 |
| Leg D – Leg B | 15 | 1 | |
| 5 | Leg B – Leg D | 15 | 2 |
| Leg D – Leg B | 15 | 3 | |
| Total | 120 | 15 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



