
Submitted:
03 October 2023
Posted:
09 October 2023
You are already at the latest version
Abstract
It is universally accepted that Maxwell equations do not remain invariant under the Galilean transformation. This conflicts the principle of relativity which states that the physical law must remain invariant in the mathematical form in all inertial frames of reference. For this reason, the Lorentz transformation is invented, and the Galilean transformation is nowadays superseded by the Lorentz transformation. However, this paper challenges this widely held belief that the Maxwell equations are not invariant under the Galilean transformation. By applying the Galilean transformation to Lienard-Wiechert electromagnetic fields it is mathematically proven that the Maxwell equations indeed remain invariant under the Galilean transformation. In addition, the critical error in Lorentz's proof of Galilean non-invariance of Maxwell equations is pointed out, and it turns out that Lorentz's conclusion that Maxwell equations are not invariant under the Galilean transformation is the result of a mathematical error.
Keywords:
Maxwell equations
; Lienard-Wiechert fields
; Galilean invariance
; Galilean transformation
; Lorentz transformation
1. Introduction
The realization that Maxwell equations are not invariant under the Galilean transformation is credited to H. A. Lorentz who in his landmark paper [1] published in 1904, among other important findings, reported that Maxwell equations are not Galilei invariant. This important finding motivated Lorentz to discover the new kind of coordinate transformation between inertial coordinate systems under which the Maxwell equations remain invariant.
The reason why Lorentz was seeking for this new transformation lies in the principle of relativity which states that the physical laws must remain the same for all observers in inertial reference frames. This principle has roots in the works of Galileo Galilei, who in 1632 [2] realized that the mechanical experiments performed on a ship moving with constant velocity must yield the same results as the same mechanical experiments performed on the shore [3].
Because Lorentz believed that the Maxwell equations were not invariant under the Galilean transformation, Lorentz thought that if the Maxwell equations are to obey the principle of relativity he must then find the transformation of coordinates under which the Maxwell equations remain invariant. Lorentz indeed derived this new transformation, which is now known as the Lorentz transformation. The Lorentz transformation was later physically interpreted by Einstein who formulated the theory of special relativity [4], and the Lorentz transformation was in accordance with Einstein’s theory.
Therefore, the importance of Lorentz’s conclusion that Maxwell equations are not invariant under the Galilean transformation cannot be understated. Thus, it is important to examine how Lorentz arrived to this conclusion. Although Lorentz did not explicitly write this, Lorentz realized that the time derivative under the Galilean transformation transforms as:
By applying the Equation (1) to Faraday’s law, and to Maxwell-Ampere law, Lorentz obtained the Galilean transformation of these two laws as:
From the equations above, Lorentz concluded that the Maxwell equations are not invariant in the mathematical form under the Galilean transformation. This convinced Lorentz that the Galilean transformation is not physical. Furthermore, Lorentz’s conclusion about Galilean non-invariance of Maxwell equations was later confirmed by many subsequent researchers [5,6,7,8,9].
However, as shown in the Section 5 of this paper, the Galilean transformation of the time derivative is not always given by the Equation (1). This is because, as shown in Section 5, the Galilean transformation of is function dependent. Moreover, it was also shown in the Section 5 that if the electric field and the magnetic field are the function of the coordinates of both an observer and the source then the transformation given by the Equation (1) is obtained when one applies the Galilean transformation to the coordinates of an observer and forgets to apply the Galilean transformation to the coordinates of the source. In short, it is demonstrated that Lorentz and subsequent researchers used incorrect mathematical procedure to demonstrate Galilean non-invariance of Maxwell equations.
In fact, it is also demonstrated in the Section 5 that the only correct way to prove that the Maxwell equations are not invariant under the Galilean transformation is to prove that any of the following twenty four equations are not valid:
where and . The reason why the equations (4) and (5) are in fact twenty four equations is because the vectors and each have three Cartesian components and there are four derivatives for each component.
If one is to use the equations (4) and (5) to prove Galilean invariance, or Galilean non-invariance, of Maxwell equations then one needs to know the exact mathematical form of the electric field and the magnetic field in advance. For that reason, the Liénard-Wiechert electric and magnetic fields were selected in order to prove or to disprove the Galilean invariance of Maxwell equations. This is because Liénard-Wiechert electromagnetic field are the only known closed-form solutions for the electromagnetic fields of a single charge in arbitrary motion.
As shown in the Section 4 of this paper, it is evident that the Maxwell equations, when applied to Liénard-Wiechert electromagnetic fields, are invariant under the Galilean transformation. From here, one can only arrive to conclusion that Lorentz’s conclusion about Galilean non-invariance of Maxwell equations is the result of a mathematical error, and that Maxwell equations are indeed invariant under the Galilean transformation.
2. The Maxwell Equations and the Liénard-Wiechert potentials
Maxwell equations that describe the electric and magnetic fields caused by electric charges and currents are considered one of the greatest achievements of theoretical physics. In modern times the original Maxwell equations are written in concise mathematical form as the set of four Maxwell equations governing the laws of electrodynamics:
where is the magnetic field, and is the magnetic field. The electric and magnetic field can be expressed as the functions of scalar electric potential and the magnetic vector potential as:
The closed-form solutions to Maxwell equations are rare, however, there exists the closed form solution to Maxwell equations for the electric and magnetic fields caused by the single moving charge. If the electric and magnetic field are caused by the single moving point charge then the potentials and become the retarded in time Liénard-Wiechert potentials [10,11] given as:
where vector represents the location of the moving source charge at retarded time :
and where vector represents the location of fixed observer:
The vector represents the velocity of the source charge at retarded time divided by the speed of light c, and it is commonly given in the scientific literature as:
where is the velocity of the source. The reason why it is emphasized that the vector is commonly given in the literature as the Equation (16) lies in the fact that, as shown in the Section 3 of this paper, the mathematical representation of the vector given by the Equation (16) is not the best possible representation of the vector .
The vector is an unit vector pointing from the location of the source charge at the time to the location of the observer:
One may now note that the potentials and are the functions of the time t and not of the retarded time . This is because the time t is the time when the electric and magnetic fields emitted by the source charge at time propagates to the observer located at position . In fact, the time t and the retarded time are related by the following equation:
and the retarded time is the solution to the Equation (18). Although it may be very difficult to solve the Equation (18) for retarded time , it is clear that the retarded time is the function of variables x, y, z and t, and for this reason it may be written:
Hence, the electric and magnetic fields and are indeed the functions of the time t because the retarded time is the function of the time t.
The electric field and the magnetic field are calculated by substituting the Liénard-Wiechert potentials and into the equations (10) and (11) which yields:
where is the acceleration of the source at time divided by the speed of light:
and the function is given by:
The equations (20) and (21) are nowadays considered the standard expressions for time retarded Liénard-Wiechert electric and magnetic fields [5,12,13] and are widely used for advanced electromagnetic calculations such as synchrotron, undulator and radar radiation [14,15,16] and in high-energy particle physics [17,18].
2.1. Some subtleties regarding the Liénard-Wiechert electromagnetic fields
Many of the subtleties regarding the Liénard-Wiechert electromagnetic fields are both explicitly and implicitly clarified in the paper about Liénard-Wiechert fields written by the author of this text [19]. For example, the charge density in the first Maxwell equation becomes [19]:
when the Liénard-Wiechert electric field is substituted in the Equation (6).
The current density , when the Liénard-Wiechert electromagnetic fields are substituted into the Equation (9) becomes [19]:
where is the velocity of the source at time t.
Furthermore, from the Appendix C.1 of the cited paper [19], specifically from the equation (A42) of that paper, it is evident that the velocity of the source can be written as:
If the position vector of the observer is fixed (constant) then the equation (26) reduces to:
However, if the position vector is not fixed, such as when transformed by Galilean transformation, then the Equation (26) must be considered as the correct equation, and the Equation (27) can no longer be considered correct.
On the final note, in order to calculate the derivatives of the electric field and the magnetic field with respect to variables x, y, z and t it is necessary to calculate the derivatives of the function with respect to these variables. By differentiating the Equation (18) with respect to time t one obtains:
Furthermore, differentiating the Equation (19) with respect to variables x, y and z yields:
where and , and where , and are the Cartesian components of the vector .
3. Galilean transformation of Liénard-Wiechert electric and magnetic field
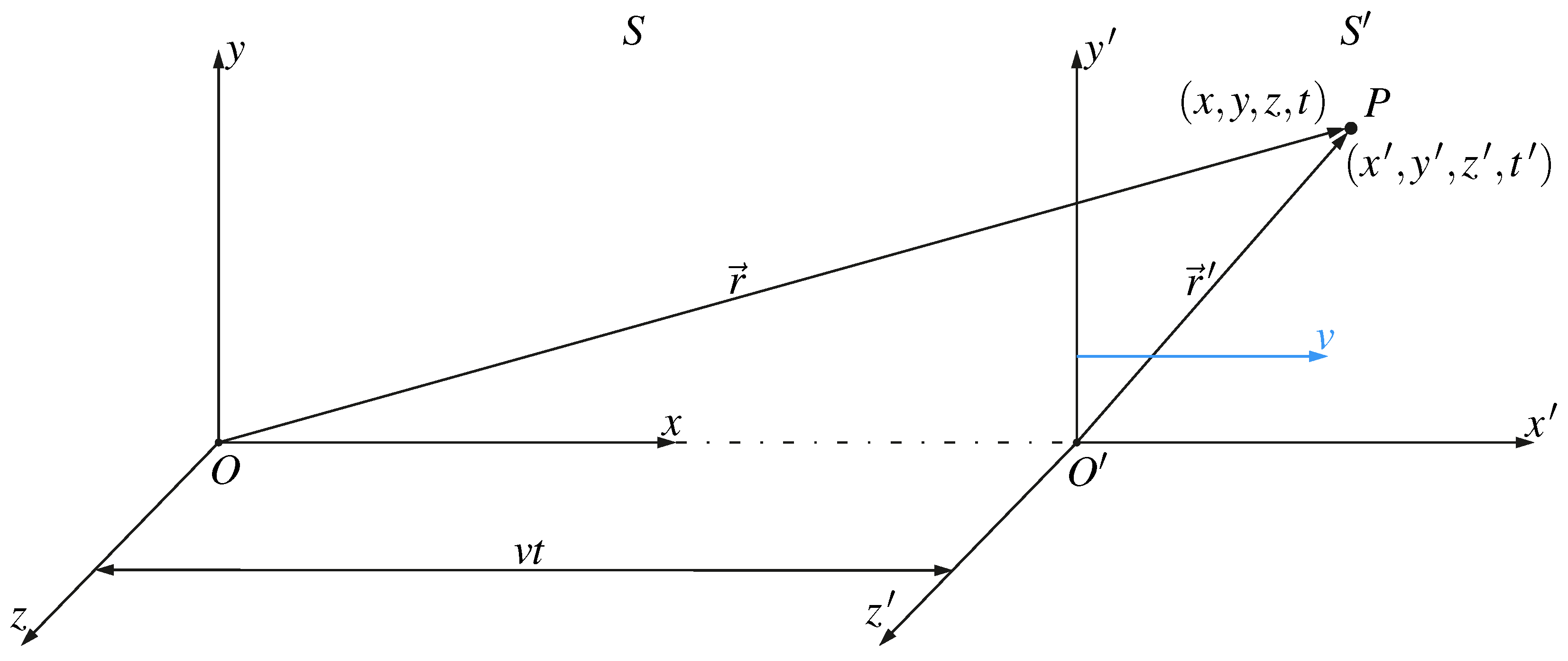
In this section, the Liénard-Wiechert electric and magnetic fields are transformed from the coordinate system S to the coordinate system , both of which are shown in the Figure 1. The coordinate system moves along x axis of the coordinate system S with constant velocity v. In the coordinate system S the point P is located at coordinates and the variables x, y and z do not change with time. In the coordinate system , the same point P is described by the coordinates , and the coordinate is the function of the time. The coordinates of the point P in are related to the coordinates of the point P in S via the following transformation:
The equations above are collectively known as the Galilean transformation which transforms the coordinates from the coordinate system S to the coordinate system .
Furthermore, from the equations (30) - (33) it follows that there exists an inverse Galilean transformation which transforms the coordinates from the coordinate system to the coordinate system S:
Because the aim of this section is to transform the Liénard-Wiechert electric and magnetic field from coordinate system S to coordinate system we start by transforming the vector from the coordinate system S to the coordinate system . This transformation can be achieved by the application of the inverse Galilean transformation to the vector :
where the vector .
Because of the Galilean transformation the retarded time in S is equal to the retarded time in , i.e. . Then, the application of the inverse Galilean transformation to the vector yields:
where the vector represents the position vector of the source viewed from the coordinate system at the time .
Using the equations (38) and (39) it is now possible to convert the difference of vectors and from the coordinate system S to the coordinate system as:
The equation above means that the distance between the source and an observer in the coordinate system is the same as in coordinate system S regardless of the time and regardless of the velocity v.
Using the Equation (40) the vector in the coordinate system S can be transformed to the coordinate system . By substituting the Equation (40) into the Equation (17) it is obtained:
The vector in the coordinate system S represents an unit vector pointing from the location of the source at retarded time to the location of observer. In the coordinate system , one can define the vector that has the same meaning:
By comparison of the right hand sides of the equations (41) and (42) it follows that:
We now arrive to the critical part of the transformation of Liénard-Wiechert electric and magnetic field from the coordinate system S to the coordinate system . The problem here is that the vector in the coordinate system S, given by the Equation (16), can be defined in at least two ways that are numerically identical in the coordinate system S:
Although the equations (44) and (45) produce numerically identical results in S, the expressions (44) and (45) are not mathematically identical expressions. Furthermore, when the expressions (44) and (45) are converted to the coordinate system using the inverse Galilean transformation, these expressions do not yield numerically identical results in . For that reason it is crucial to select the correct mathematical representation of the vector .
If one desires to find the correct mathematical expression for the vector one must look at how the Liénard-Wiechert potentials are derived. The scalar Liénard-Wiechert potential is the solution to the following inhomogeneous three dimensional wave equation:
where is three dimensional Dirac delta function. Using the Green’s function method [20] it follows that the solution to the equation above is:
where the function is the free space Green’s function for three dimensional wave equation given by [21]:
Substituting the Equation (48) into the Equation (47) yields:
If we first integrate over whole space , the Dirac delta function selects the point , thus, the equation above becomes:
To proceed, we now make use of the following identity involving Dirac delta function [22,23]:
where is the solution to the equation . Note that the following equation is equal to zero:
only if , which is clear from the Equation (18). Then, by the application of the identity (51) to Dirac delta function in the Equation (50) one obtains:
Substituting the Equation (53) into the Equation (50) yields the Liénard-Wiechert scalar potential:
where the vector is:
In the coordinate system S the position vector is not the function of time, and because of this in S. Therefore, in the coordinate system S the following equation holds:
However, the equations (55) and (56) give different results when Galilei transformed to the coordinate system which means that Equation (56) is valid only in the coordinate system S. Therefore, although the Equation (56) holds in S, it is clear that the vector is generally given by the Equation (55) and not by the Equation (56).
Let us now define the vector in the coordinate system . According to the Equation (55) the vector is the derivative with respect to retarded time of the difference between the position vector of the source at time and the position vector of the observer divided by c. In the coordinate system we can define the vector in that has the same meaning:
By substituting the Equation (40) into the Equation (55), and using one finds the Galilean transformation of the vector from the coordinate system S to the coordinate system as:
Clearly, the vector in S and the vector in are identical vectors. By taking the derivative of the Equation (58) with respect to time , and by using , it is obtained:
Similarly, by using it is obtained that:
We now have all the tools necessary to transform the Liénard-Wiechert electric and magnetic field, respectively given by the equations (20) and (21), from the system of coordinates S to the system of coordinates . Simply by substituting the equations (40), (43), (58), (59) and (60) into the equations (20) and (21) it is obtained:
Furthermore, note that by substituting the Equation (40) into the Equation (18), and by using and it follows that:
This completes the Galilean transformation of Liénard-Wiechert electric and magnetic fields from the coordinate system S to the coordinate system .
Note that because the equations (61) and (62) are obtained by substituting the equations (40), (43), (58), (59) and (60) into the equations (20) and (21) one may also write:
The equations above mean that the electric and magnetic Liénard-Wiechert fields in are not only identical to the electric and magnetic fields in S in the mathematical form, but they are also numerically identical.
4. The proof of Galilean invariance of Maxwell equations
In this section, despite widely accepted belief that Maxwell equations are not invariant under the Galilean transformation, the proof is given that the Maxwell equations, when applied to Liénard-Wiechert electromagnetic fields, are indeed invariant under the Galilean transformation.
Because the proof is somewhat longer than usual, all the auxiliary mathematical equations are moved to appendices Appendix A, Appendix B and Appendix C, but the important observations and mathematical identities remain in this section.
In the subSection 4.1 of this section some mathematical identities that are important for this proof are derived. The subSection 4.2 brings the summary of auxiliary mathematical identities derived in appendices Appendix A, Appendix B and Appendix C that are utilized in this proof. Finally in subSection 4.3 of this section it was shown that all four Maxwell equations remain invariant under the Galilean transformation.
4.1. Some important mathematical considerations
To begin the proof, one may start by considering the derivative of the function with respect to variable . Because under the Galilean transformation one may write:
The function is the solution to the Equation (18), therefore is the function of variables x, y, z and t, all defined in the coordinate system S. Another way of stating this is to write . Thus, by the application of the chain rule, it can be written:
Clearly, because the variables y and z do not depend on the coordinate x, they also do not depend on the coordinate and the time (this is because ), hence, the derivatives . Thus, the Equation (67) simplifies to:
Because under the Galilean transformation one can write , the variable x can be interpreted as the function of variables and , i.e. . For this reason, it is not straightforward to calculate the derivative . Nevertheless, to calculate the derivative one may start by differentiating the Equation (63) with respect to variable :
The Equation (69) can be simplified by using the definition of the vector given by the Equation (42), and the definition of the vector given by the Equation (56). Substituting the equations (42) and (56) into the Equation (69) yields:
where is Cartesian x component of the vector . Furthermore, because it follows that:
Then by replacing the derivative in the last right hand side term of the Equation (68) with the Equation (71), and by replacing the derivative on the left hand side of the Equation (68) with (which is correct because ) one obtains:
The Equation (72) can be rearranged as:
Substituting the Equation (28), i.e. identity , into the expression one obtains:
In the Section 3 it was shown that and that . Thus, substituting and into right hand side of the Equation (74) yields:
Then, by substituting the Equation (75) into the left hand side of the Equation (73) it is obtained that:
From the Equation (29) it follows that the derivative is:
and from the identity it follows that the component of the vector can be written as:
Then, by substituting the equations (77), (78) and (28) (i.e. ) into the Equation (76) it is obtained:
From the equation above, it clearly follows that:
Furthermore, by differentiating the inverse Galilean transformation with respect to variable one obtains:
Substituting the Equation (80) into the Equation (81) yields:
Using the Galilean transformation of time, i.e. and , the Equation (68) can be written as:
Substituting the equations (80) and (82) into the Equation (83) yields:
By using the same approach, one also finds that the following equations hold:
As it will be shown in the subsequent sections, and in the appendices of this paper, the equations (84) - (86), together with the equations derived in the Section 3, are sufficient to prove that the Maxwell equations, when applied to Liénard-Wiechert electromagnetic fields, remain invariant under the Galilean transformation.
4.2. Summary of the mathematical identities derived in the appendices
Using the equations (84) - (86), and the Equation (40) derived in the Section 3, it was shown in the Appendix A that the following equations hold:
where , , and where and . Furthermore, in the Appendix B it was shown that the following equations hold:
Using the results from the Appendix A and from the Appendix B, the following equations were derived in the Appendix C:
As it will be shown in the following subsection, the equations (87) - (94) are enough to prove the Galilean invariance of the Maxwell equations.
4.3. The Galilean transformation of Maxwell equations
The exact proof of the Galilean invariance of Maxwell equations when applied to Liénard-Wiechert electromagnetic fields is delivered in this subsection. In order to prove the Galilean invariance of Maxwell equations, one may start by differentiating the right hand side of the Equation (20) with respect to variables :
On the other hand, the derivative of the Galileo transformed electric field given by the Equation (61) with respect to variables is:
By substituting the equations (87) - (94) into the Equation (95) and by using , , , and (all derived in the Section 3) it is obtained:
By comparing the right hand side of the Equation (97) to the right hand side of the Equation (96) it follows that:
Note that because the vectors and have three Cartesian components the Equation (98) represents twelve differential equations (four for each component of the vectors and ).
By differentiating the Equation (21) with respect to variables one obtains:
Substituting the equations (89) , (64), (43) and (98) into the Equation (99) yields:
It is now fairly straightforward to show that the Maxwell equations remain invariant under the Galilean transformation. For example, according to the equations (6) and (24), in the specific case of Liénard-Wiechert electric field, the first Maxwell equation, or Gauss law for electric field, reads [19]:
The equation above can be rewritten as:
where , and are Cartesian components of the vector . Using the inverse Galilean transformation and one finds that:
Furthermore, from the Equation (98) it follows that:
Substituting the equations (103) - (106) into the Equation (102) yields:
The equation above can be written in more compact form as:
where the operator has the usual meaning . This proves the Galilean invariance of the first Maxwell equation (the Gauss law for electric field).
The second Maxwell equation, or the Gauss law for magnetic field, written in the coordinate system S reads:
Written in terms of Cartesian components the Equation (109) becomes:
where , and are Cartesian components of the vector .
From the Equation (100) it follows that:
Substituting the equations (111) - (113) into Equation (110) yields:
The equation above can be written in compact form as:
which proves the Galilean invariance of the second Maxwell equation.
The third Maxwell equation, or Faraday’s law, can be written in the coordinate system S as:
The Equation (116) is in fact shorthand notation for the following three partial differential equations:
From the Equation (98) it follows that:
Furthermore, from the Equation (100) it follows that:
Substituting the equations (120) and (121) into the equations (117)-(119) yields:
The equations (122) - (124) can be written in the compact form as:
where the Equation (125) is the Galilean transformation of the third Maxwell equation, also called Faraday law, from the coordinate system S to the coordinate system . This proves the Galilean invariance of the third Maxwell equation.
Finally, the fourth Maxwell equation, or Maxwell-Amperè equation, in the system of coordinates S reads:
According to the Equation (25), in the specific case of Liénard-Wiechert fields, the current density becomes:
and according to the Equation (26) the velocity of the source at time t is given by:
To prove that the Equation (126) is invariant under the Galilean transformation one may start by applying the Galilean transformation and to the Equation (128) as:
According to the Equation (128), in the coordinate system S, the velocity of the source means the velocity of the source located at relative to the observer located at position .
In the coordinate system one can also define the velocity of the source at time relative to the location of observer at time as:
Clearly, by the comparison of the right hand sides of the equations (129) and (130) it follows that:
The equation above represents the Galilean transformation of velocity , as defined by the Equation (128), from the coordinate system S to the coordinate system .
By substituting the equations (103) and (131) into the Equation (127) one obtains the Galilean transformation of the current density as:
Furthermore, the Equation (126) can be written in terms of its Cartesian components as:
where , and are Cartesian components of the vector . From the Equation (100) it follows that:
Furthermore, from the Equation (98) it follows that:
Substituting the equations (132), (136) and (137) into the equations (133) - (135) yields the Galilean transformation of the Maxwell-Ampere Equation (126) from the coordinate system S to the coordinate system :
which completes the proof that the Maxwell equations, when applied to Liénard-Wiechert electromagnetic fields, are invariant under the Galilean transformation.
5. Critical error in standard proofs of Galilean non-invariance of Maxwell equations
The aim of this section is to expose the critical mathematical error in the proofs of Galilean non-invariance of Maxwell equations present in many scientific books and papers. The proofs of the Galilean non-invariance of Maxwell equations [1,5,6,7,8,9] typically rely on what is considered the Galilean transformation of the derivative with respect to time t, i.e. the transformation of :
In addition, it is often correctly stated in the literature that the operator transforms from the coordinate system S to the coordinate system as:
where the operator reads
To transform, say the third Maxwell equation (or Faraday’s law), from the coordinate system S to the coordinate system one may start by writing the third Maxwell equation in the coordinate system S as:
where . Because both vectors and are considered as the functions of variables x, y, z and t:
By substituting the inverse Galilean transformation , , and into the equations (142) and (143) one obtains:
where . Furthermore, substituting the equations (144) and (145) into the Equation (141) yields:
Then by replacing the operator ∇ with operator , and by replacing the operator with the operator one obtains:
The Equation (147) is then usually taken as the proof that Maxwell equations are not invariant under the Galilean transformation. Moreover, the Equation (147) is the modern version of the three equations found at page 812 of Lorentz’ 1904 paper [1].
Clearly, the main reason why the Maxwell Equation (141) appears not to be invariant under the Galilean transformation is the Galilean transformation of the derivative , which according to scientific literature, under the Galilean transformation always becomes the operator .
Let us now examine how the Galilean transformation of the derivative is derived. For that purpose, let the function u be the function of coordinates x, y, z and t defined in the coordinate system S as:
The function u can be any of the Cartesian components of the electric field or the magnetic field . By substituting the inverse Galilean transformation , , and into the function , the function becomes:
where the function is simply the Galilei transformed function . By the application of the chain rule to the function one finds that the time derivative of the function can be written as:
From the Galilean transformation , , , , it follows that , , , . By inserting these derivatives into the Equation (150) it is obtained:
From here, one concludes that the partial derivative under the Galilean transformation transforms as:
Using the equation above, one shows that the Maxwell equations do not remain invariant under the Galilean transformation.
To illustrate what is wrong with the Equation (152) let us define the function in the coordinate system S as:
where is any differentiable function, and where is deliberately undefined for now and is considered simply a real constant. Clearly, in the coordinate system S the derivative of the function with respect to time is:
By substituting the inverse Galilean transformation and into the Equation (154) one finds that:
The Galilean transformation of the function can be achieved by substituting the inverse Galilean transformation , , and into the Equation (153) to obtain:
According to the transformation of the derivative given by the Equation (139) one finds that the derivative of the function with respect to variable t is:
By comparing the right hand side of the equation above to the right hand side of the Equation (155), one naively concludes that the Galilean transformation of the derivative given by the Equation (139) is the correct transformation.
Let us now assign the physical meaning to the variable x and to the parameter by letting x be the Cartesian x coordinate of the observer and by letting be the Cartesian x coordinate of the source. In this case, both x and transform according to Galilean transformation:
Substituting the equations (158) and (159) into the Equation (153), and substituting into the same equation yields:
Furthermore, by substituting the equations (158), (159) and into the right hand side of the Equation (154) one finds that the derivative of the function with respect to variable t is:
Let us now apply the Galilei transformed derivative to the function to find the derivative of the function with respect to time t:
Obviously, the right hand side of the Equation (162) is not equal to the right hand side of the Equation (161). This also means that the Galilean transformation of the derivative given by is no longer correct. This begs the question, why the transformation given by the Equation (139) is not correct when the physical meaning is assigned to ?
The correct approach here is to consider the function g be the function of variables x, , y, z and t. In that case, the function g can be written as:
where functions and are identical, i.e. . By substituting the inverse Galilean transformation , , , and into the Equation (163) it is obtained:
where . Although the functions and are identical, the application of the chain rule to the function yields the derivative of the function with respect to time t as:
Substituting into the equations (158) and (159) and rearranging yields:
By differentiating the equations (166) and (167) with respect to time t it is obtained:
Substituting the equations (168) and (169) into the Equation (165), and substituting the derivatives , and into the same equation yields:
Furthermore, by differentiating the function with respect to variables and one finds that:
By substituting the Equation (171) into the Equation (170) it is obtained:
From the equation above, one concludes that the Galilean transformation of the derivative is:
Using the Galilean transformation of the derivative given by the Equation (173) we now correctly find the derivative with respect to time of the function as:
Clearly, the Galilean transformation of the derivative given by the Equation (173) is the correct transformation in this example, and widely accepted transformation is incorrect transformation if is considered the Cartesian x coordinate of a source located in 3D space.
There are two key points that can be observed from the example given in this section:
- (i)
- as shown in the given example, the Galilean transformation of the time derivative depends on the function and on the physical meaning of variables in that function. This means that the transformation is not always correct.
- (ii)
- if the function is the function of the coordinates of both an observer and the source, the Galilean transformed time derivative is only correct if the coordinates of the observer are transformed by the Galilean transformation and if the source coordinates are not transformed using the Galilean transformation.
Because of the points (i) and (ii) the only guaranteed way to show that Maxwell equations are not invariant under the Galilean transformation is to prove that any of the following twenty four equations is incorrect:
where and . In the case of Liénard-Wiechert electric and magnetic field, this is not possible because it is already proven in this paper that the equations (175) and (176) are correct.
In conclusion, because of the arguments given in this section, the proof that Maxwell-equations are not invariant under the Galilean transformation given by Lorentz [1] must not be considered correct because the transformation is not always correct. For the same reason, any of the proofs of Galilean non-invariance of Maxwell equations commonly found in the scientific literature, and which rely on the Galilean transformation of the derivative , must also be considered incorrect.
6. Conclusion
Lorentz’s conclusion that Maxwell equations are not invariant under the Galilean transformation was pivotal moment in physics, and had far reaching consequences and implications. It motivated Lorentz to discover the new kind of space-time transformation called the Lorentz transformation, and the Galilean transformation was no longer considered physical. Furthermore, Lorentz discovery is now considered as foundation of Einstein’s theory of special relativity.
Despite the significance of Lorentz conclusion, it is undoubtedly shown in this paper that the Lorentz’s conclusion about Galilean non-invariance of Maxwell equations is the result of mathematical error. It is also shown that it is not possible to use Lorentz’s mathematical procedure in order to prove or disprove the invariance of Maxwell equations under the Galilean transformation. This conclusion applies not only to Lorentz, but to all subsequent researchers that used a procedure similar to Lorentz’s in order to show that Maxwell equations are not invariant under the Galilean transformation.
As shown in this paper, the correct mathematical procedure to either prove (or disprove) the Galilean invariance of Maxwell equations is to show that the derivatives with respect to space and time of each component of the electric and magnetic field are equal (or not equal) to the corresponding derivatives with respect to space and time in the Galilean transformed coordinate system.
The only way one can perform this procedure is if one knows in advance the closed mathematical form of the electric and the magnetic field. For that reason, this procedure was applied to Liénard-Wiechert electromagnetic fields as closed form of these electromagnetic fields is known. It was undoubtedly shown that the Maxwell equations, when applied to Liénard-Wiechert electromagnetic fields, remain invariant in the mathematical form under the Galilean transformation.
Because of the principle of the superposition, which states that the total electromagnetic field is the sum of electromagnetic fields of the individual charges, the conclusion that Maxwell equations are invariant under the Galilean transformation when applied to Liénard-Wiechert electromagnetic fields caused by the single moving charge can be raised to the general conclusion that the Maxwell equations are indeed invariant under the Galilean transformation.
Finally, a word of caution: this paper does not claim, nor implicates, that the Lorentz transformation is incorrect as the correctness of the derivation of Lorentz transformation was not examined in this paper. However, it does claim that the Maxwell equations are invariant under the Galilean transformation. This means that, for the time being, the Maxwell equations are to be considered invariant under both Lorentz and Galilean transformation.
Declarations
Data Availability Statement
The author declares that the data supporting the findings of this study are available within the paper.
Conflicts of Interest
The author declares that there is no conflict of interest.
Appendix A. Galilean transformation of the derivatives of the vector and the scalar
To derive the Galilean transformation of the derivatives of the vector and the scalar , first note that by differentiating the Equation (40) (i.e. the equation ) with respect to time , and by using it can be written:
Similarly, by differentiating the Equation (40) with respect to time and by using it is obtained:
Furthermore, by differentiating the vector difference with respect to variable it is obtained:
Next, note that the derivative of the vector with respect to variable x in the coordinate system S is:
Substituting the Equation (A2) into the Equation (A3) yields:
In the Section 4, subSection 4.1, the Equation (84) was derived. The Equation (84), repeated here for clarity, reads:
Substituting the Equation (A6) into the right hand side of the Equation (A5) yields:
By comparing the right hand side of the Equation (A4) to the right hand side of the Equation (A7) one finds that:
Clearly, using the same approach used to show that the Equation (A8) is valid, one can also show that the following two equations are valid:
Furthermore, differentiating the scalar with respect to variable yields:
By substituting the Equation (40), i.e. , and by substituting the Equation (A8) into the Equation (A10) it is obtained:
By differentiating the scalar with respect to variable x one finds that:
Clearly, the right hand side of the Equation (A12) is equal to the right hand side of the Equation (A13), hence:
Using the same approach, one can also show that:
The derivative of with respect to variable can be written as:
By substituting the Equation (40), i.e. , and by substituting the Equation (A1) into the Equation (A17) it is obtained:
Evidently, the right hand side of the Equation (A18) is equal to the derivative , hence:
Finally, using the equation and using one finds that:
Appendix B. Galilean transformation of the derivatives of the vectors , ,
The vector is given by the Equation (42) in the Section 3, and its derivative with respect to variable can be written:
where . Substituting the Equation (40) derived in the Section 3, i.e. (where ), into the Equation (B1) and substituting the equations (A8) and (A14) into the same equation it is obtained:
On the other hand, the derivative of the vector , given by the Equation (17) in the Section 2, with respect to variable x is:
Clearly, by comparing the right hand sides of the equations (B2) and (B3) it follows that:
By using the same approach, one finds that:
Similarly, the derivative of the vector with respect to time is:
Substituting the equation , and the equations (A1) and (A19) into the Equation (B7) yields:
To proceed, note that according to the Equation (55), derived in the Section 3, the vector is written as:
By differentiating the Equation (B9) with respect to variable x it is obtained:
Because for any differentiable function it can be written that the Equation (B10) can be written as:
By substituting the Equation (A8) into the Equation (B11) and using it is obtained:
where the vector is given by the Equation (57) in the Section 3. Furthermore, by using the similar procedure it can also be shown that:
The derivative of the vector with respect to variable t can be written:
Substituting the Equation (A2) into the Equation (B15) and using yields:
According to the Equation (55), given in the Section 3, the derivative of the vector with respect to retarded time can be written as:
Differentiating the Equation (B17) with respect to variable x yields the derivative of the vector with respect to variable x as:
Using and substituting the Equation (A8) into the Equation (B18) yields:
By using the similar procedure it also follows that:
The derivative of the vector with respect to variable t can be written as:
Substituting the Equation (A1) into the Equation (B22) and using yields:
Appendix C. Galilean transformation of the derivatives of miscellaneous functions
Here, we first find the derivative with respect to variable x of the function as:
By substituting the equations (B4) and (B12) into the Equation (C1) and by using and it is obtained:
Using the similar procedure, one also finds that:
The derivative of the function with respect to time t is:
Substituting the equations (B8) and (B16) into the Equation (C5) and using and yields:
Furthermore, in the Section 2 the function is given by the Equation (23) as:
Differentiating the Equation (C7) with respect to variable x yields:
By substituting the Equation (B12) into the Equation (C8) and using it is obtained:
where the factor is defined by the Equation (60) given in the Section 3. Using the similar procedure, one also finds that:
Similarly, by differentiating the factor with respect to variable t one obtains:
Substituting the Equation (B16) into the Equation (C12) and using yields:
Finally, the derivative with respect to variable x of the vector difference can be written as:
Substituting the equations (B4) and (B12) into the Equation (C14) yields:
By using the same procedure one also finds that:
Similarly, by taking the derivative of the difference with respect to variable t one obtains:
By substituting the equations (B8) and (B16) into the Equation (C18) it is obtained:
References
- Lorentz, H. Electromagnetic phenomena in a system moving with any velocity smaller than that of light. Proc. KNAW 1904, 6, 809–831. [Google Scholar]
- Budden, T. Galileo’s ship thought experiment and relativity principles. Endeavour 1998, 22, 54–56. [Google Scholar] [CrossRef]
- Galilei, G. Dialogue Concerning the Two Chief World Systems – Ptolemaic and Copernican, 2. ed.; University of California Press: Berkeley, 1967. [Google Scholar]
- Einstein, A. Zur Elektrodynamik bewegter Körper. Ann. Phys. 1905, 322, 891–921. [Google Scholar] [CrossRef]
- Jackson, J. Classical Electrodynamics, 3. ed.; John Wiley & Sons: London, 1999. [Google Scholar]
- Resnick, R. Introduction to Special Relativity; John Wiley & Sons: New York, 1968; p. 8. [Google Scholar]
- Miller, A. Albert Einstein’s Special Theory of Relativity; Springer-Verlag New York Inc.: New York, 1998; p. 30. [Google Scholar]
- Darrigol, O. Electrodynamics from Ampere to Einstein; Oxford University Press: Oxford, 2000; p. 435. [Google Scholar]
- Preti, G.; Felice, F.; Masiero, L. On the Galilean non-invariance of classical electromagnetism. Eur. J. Phys. 2009, 30, 381–391. [Google Scholar] [CrossRef]
- Liénard, A. Champ électrique et magnétique produit par une charge électrique concentrée en un point et animée d’un mouvement quelconque. L’Éclairage Électrque 1898, 16, 5–14. [Google Scholar]
- Wiechert, E. Elektrodynamische Elementargesetze. Ann. Phys. 1901, 309, 667–689. [Google Scholar] [CrossRef]
- Griffiths, D. Introduction to Electrodynamics, 4. ed.; Pearson: Boston, 2013. [Google Scholar]
- Thidé, B. Electromagnetic field theory; Upsilon Books: Uppsala, 2002. [Google Scholar]
- Arakelyan, S.; Grigoryan, G.; Grigoryan, R. Lienard-Wiechert potentials and synchrotron radiation from a relativistic spinning particle in pseudoclassical theory. Phys. At. Nucl. 2000, 63, 2115–2122. [Google Scholar] [CrossRef]
- Steinbach, A. Electromagnetic theory of range-Doppler imaging in laser radar. I: Scattering theory. J. Opt. Soc. Am. A 1991, 8, 1287–1295. [Google Scholar] [CrossRef]
- Salehi, E.; Hosaka, M.; Katoh, M. Time structure of undulator radiation. J. Adv. Simulat. Sci. Eng. 2023, 10, 164–171. [Google Scholar] [CrossRef]
- Plaja, L.; Jarque, E. Introduction of the Liénard-Wiechert correction to the particle simulation of relativistic plasmas. Phys. Rev. E 1998, 58, 3977–3983. [Google Scholar] [CrossRef]
- Li, X.; Yu, Q.; Gu, Y.; Qu, J.; Ma, Y.; Kong, Q.; Kawata, S. Calculating the radiation characteristics of accelerated electrons in laser-plasma interactions. Phys. Plasmas 2016, 23, 033113. [Google Scholar] [CrossRef]
- Dodig, H. Direct derivation of Lienard–Wiechert potentials, Maxwell’s Equations and Lorentz force from Coulomb’s law. Mathematics 2021, 9. [Google Scholar] [CrossRef]
- Roach, G. Green’s functions, 2. ed.; Cambridge university press: Newcastle upon Tyne, 1982. [Google Scholar]
- Duffy, D. Green’s functions with applications, 2. ed.; CRC Press: Boca Raton, 2015. [Google Scholar]
- Arfken, G.; Weber, H. Mathematical Methods for Physicists, 6. ed.; Elsevier Academic Press: Amsterdam, 2006. [Google Scholar]
- Kusse, B.; Westwig, E. Mathematical Physics, 2. ed.; WILEY-VCH Verlag Gmbh & KGaA: Winheim, Germany, 2006. [Google Scholar]
Figure 1.
Two reference frames S and . The reference frame S is considered the laboratory frame while is moving along x axis with constant velocity v. The point P is stationary in S and has coordinates , while in the coordinate system the point P is moving with velocity along axis in .
Figure 1.
Two reference frames S and . The reference frame S is considered the laboratory frame while is moving along x axis with constant velocity v. The point P is stationary in S and has coordinates , while in the coordinate system the point P is moving with velocity along axis in .
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



