Submitted:
07 September 2023
Posted:
08 September 2023
You are already at the latest version
Abstract
In order to create a smart mine, it is necessary to digitize the existing emulsion pumping station. Existing research does not achieve this task, this paper designs and manufactures a high-pressure, high-flow, high-water-based mining digital controlled unloading valve (abbreviated as HLHMDCUV), which achieves good results in both theoretical analysis and experimental testing. In order to obtain the accurate dynamic characteristics, this valve was analyzed by simulation using AMESim. Based on the dynamic performance analysis and the flow field analysis inside the valve body, the structure has been optimized to improve the performance of HLHMDCUV. The results show that the HLHMDCUV has a better dynamic characteristics, which were also demonstrated in the experiment. At the same time, the HLHMDCUV is easy to disassemble and maintain. This paper provides a theoretical basis for the design of such valves, which is conducive to the subsequent promotion of intelligent mine transformation.
Keywords:
mining unloading valve
; high pressure
; large flow
; high-water-based fluid
; digitally controlled unloading valve
1. Introduction
The underground general mining face is a highly hazardous working environment. As an important equipment to ensure the safety of the staff, the safety and reliability of the hydraulic supply system should not be neglected. The fluid supply system is the hydraulic power source, and its main role is to provide qualified and sufficient high-pressure power emulsion for the hydraulic support of the general mining face. Emulsion pumping station as the power source of the liquid supply system, its automatic unloading system is one of the main systems in the emulsion pump to work by hydraulic control, emulsion pump unloading system in the automatic unloading, its reliability, sensitivity and recovery are important technical indicators that we as a measure of judging the quality of the emulsion pumps, it is clear that these factors also determines the emulsion pumping station is able to meet the pressure requirements of the hydraulic support for different periods of time, as well as the normal work of the emulsion pump, the service life of the stable work. Obviously, these factors also determine whether the emulsion pump station can timely meet the pressure requirements of the hydraulic support at different times, as well as the service life of the emulsion pump when it works normally and stably. Its working performance will affect directly the hydraulic support on the general mining face. The automatic unloading system is to automatically complete the pressure overload, so as to protect its own internal systems.
With the advent of the intelligent era, the intelligence of coal mine production should also move forward. At present, the unloading valves used in coal mine production are still mechanical unloading valves and electromagnetic unloading valves, which not only can't be connected to the intelligent production system of coal mine, but also hinder the intelligent upgrading of coal mine; moreover, when they are in the frequency operation of emulsion pumping station, the frequent opening and closing of them will produce pressure pulsation in the emulsion supply system, which will have an adverse effect on the life span and safety of the supply system; and at the same time, it also consumes the energy of the pumping station, which is a waste of energy.
Due to many studies on proportional relief valves, some people have applied relief valves in pumping stations to improve the above problems [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19], but most of them only stay in the theoretical design stage, and the practice of using relief valves in coal mine emulsion pumps is not in line with economic benefits. Because when the pump is unloaded by using a relief valve, the outlet pressure of the pump is high, wasting energy. At the same time, due to the complex environment of coal mine underground production working surface, high temperature, humidity, dust, as well as combustible gases, the general digital relief valve is not able to solve the current problem. In order to carry out intelligent upgrading of coal mines, combined with the reality of high pressure and high flow rate (40 MPa & 1200 L/min) in the main production of coal mines, this paper designs a new type of high-pressure, large-flow and high-water-based mining digitally controlled unloading valve, abbreviated as HLHMDCUV.
2. Structure and modeling of the HLHMDCUV
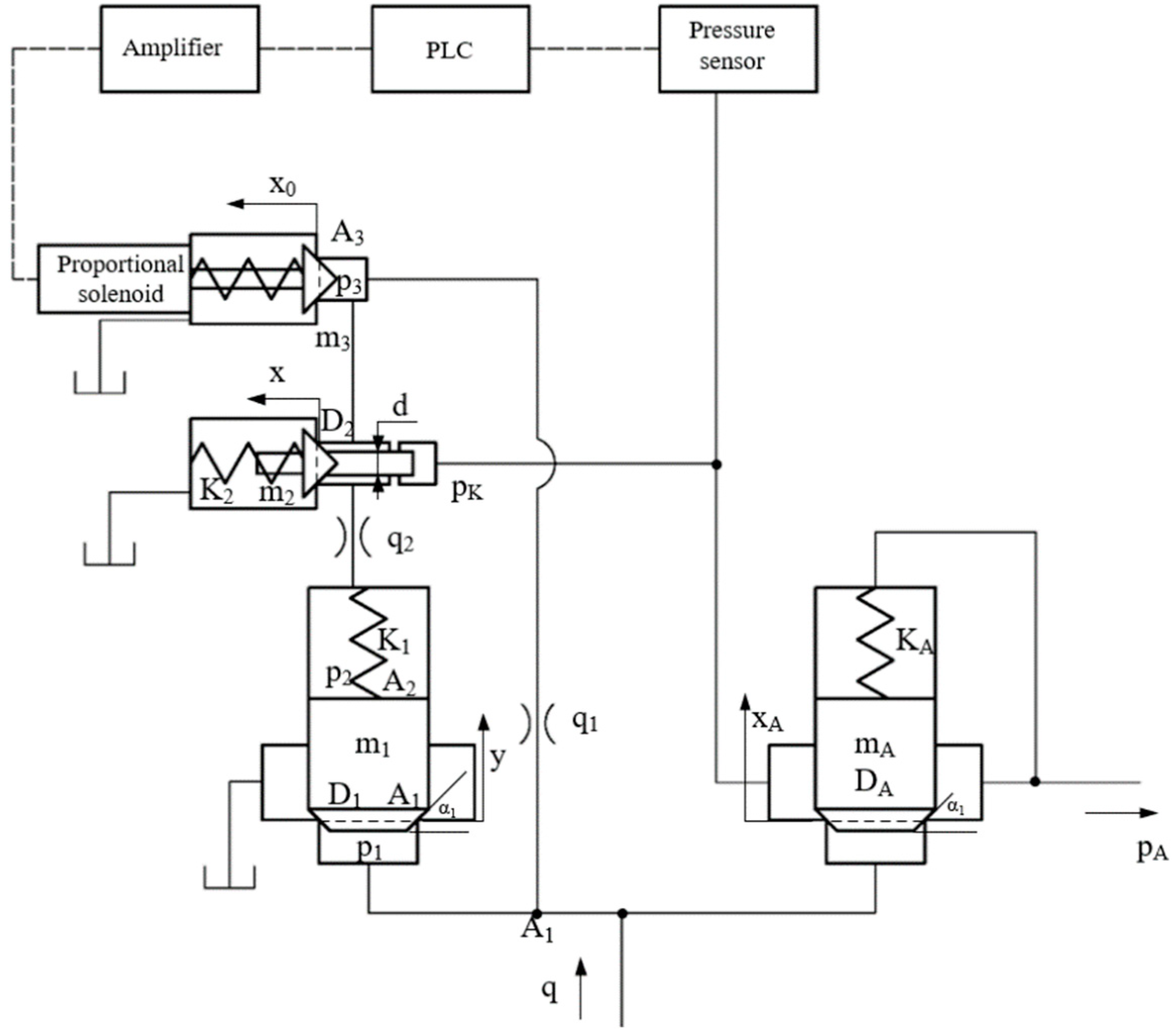
In order to adapt to the many inconveniences such as narrow space, high temperature, high humidity, dust, high-power equipment, complex working conditions in underground coal mines; at the same time, in order to improve the dynamic performance of the unloading valve, improve the stability of the unloading valve work, so that it can be accessed to the intelligent control system, this paper designs the structure and principle of the HLHMDCUV as shown in Figure 1.
The HLHMDCUV is mainly composed of an one-way main spool, an unloading main spool, a mechanical unloading pilot valve and a digitally controlled pilot valve.The difference between the two installation forms in Figure 1 is mainly the installation position of the damping hole in the upper chamber of the unloading main spool. The working principle of the two installation forms is identical.
The emulsion output from the emulsion pump station enters the lower chamber of the unloading main spool and the lower chamber of the check main spool of the HLHMDCUV from the lower part, and at the same time, passes through the damping holes, flows into the upper chamber of the unloading main spool, flows into the front chamber of the digitally controlled pilot valve, and flows into the front chamber of the mechanical unloading pilot valve. At this time, the upper chamber and the lower chamber of the unloading main spool are filled with the same pressure of the emulsion, so it is closed under the action of the spring; and one-way main spool of the spring preload is much smaller than the lower chamber of the liquid pressure, so it is in the open state. The outlet of the unloading main spool connects to the liquid tank, and the outlet of the one-way main spool, connects to the hydraulic bracket fluid supply system downhole. According to the demand of the hydraulic support for emulsion, its working hours can be divided into the time when it needs to use fluid and the time when it does not need to use fluid. When the hydraulic support needs fluid, the emulsion output from the emulsion pump station enters the fluid supply system from the one-way main valve spool and flows into the hydraulic support on the general mining face. When the hydraulic support does not need to use emulsion, the pressure in the fluid supply system rises, and when it reaches the preset pressure, the digitally controlled pilot valve opens, unloading the fluid in the upper chamber of the unloading main spool; the unloading main spool is pushed open by the emulsion, and the excess emulsion is returned to the fluid tank. At this time, the one-way main valve core closes under the action of the outlet high-pressure liquid, disconnecting the emulsion pump from the liquid supply system and completing the unloading; at the same time, ensuring that the pressure of the liquid supply system is maintained at a preset value.
Therein, the PLC controls the spring pressure of the digitally controlled pilot valve by comparing the pressure at the outlet of the unidirectional main spool with the preset pressure and utilizing an amplifier to output a digital signal to the proportional solenoid to control the spring pressure of the digitally controlled pilot valve, thereby controlling the flow of the liquid in the upper chamber of the unloading main spool, and thereby controlling the opening and closing of the unloading main spool. Completes the flow control of the emulsion pumping station's output liquid, thus ensuring that the pressure at the outlet of the one-way main valve meets the design needs.
2.1. Establishment of the Simulation Model
2.2.1. AMESim Simulation Model
The dynamic characteristics of the unloading valve refers to the operating characteristics of the unloading valve from the initial pressure to the stabilized pressure when there is a sudden change in the valve port pressure. Usually measured by pressure overshoot and pressure stabilization time.
To ensure the reasonableness of the structural parameters of the HLHMDCUV, a simulation model of the physical structure of the HLHMDCUV was established using AMESim. The influence of important structural parameters of the unloading valve on its dynamic characteristics has been analyzed and studied. According to the actual working conditions of the comprehensive mining face, the action of the hydraulic support can be categorized into "when fluid is required" and "when fluid is not required". The AMESim simulation model of HLHMDCUV is shown in Figure 2.
The HLHMDCUV consists mainly of a control system and a physical structure. In order to obtain its accurate operating characteristics, this paper utilizes AMESim to build a physical model and a digital control system for the HLHMDCUV. Dynamic adjustment of the system pressure through the load system controller realizes the dynamic adjustment of the load and simulates the load of the actual working condition, so as to obtain the dynamic characteristics, to obtain the dynamic characteristics of the digital relief valve under actual operating conditions.
This paper uses a proportional solenoid, which is connected to the pilot valve regulator spring, and the increment of the proportional solenoid can control the pre-compression of the pilot valve regulator spring, thus changing the pressure of the pilot valve. In the model, it is assumed that the proportional solenoid is in an ideal operating state, so no detailed mathematical or structural model of the proportional solenoid is developed, and only the electromagnetic force is used as a gain.
The PID parameter setting method adopts the engineering debugging method, which mainly relies on engineering experience directly in the control system experiment. This method is simple and easy to grasp, so it is widely used in engineering practice. Repeatedly adjusted based on practical experience, the proportional, integral and differential coefficients were 30, 1.5 and 0, respectively.
In AMESim, a dosing emulsion pump is simulated with an ideal dosing hydraulic pump. A variable throttle valve was used to simulate the fluid usage of a hydraulic support. When simulating the hydraulic bracket need emulsion, the variable throttle valve opens a certain amount of emulsion into the hydraulic bracket; when simulating the hydraulic bracket does not need emulsion, the variable throttle valve will be closed. Due to the complexity of the actual working environment of the underground coal mine emulsion pumping station, the main purpose of AMESim simulation is to analyze whether the designed HLHMDCUV structure can work properly and to study the influence of the main structural parameters on the performance of the relief valve. Therefore, the following simplifications and assumptions have been made in the simulations to avoid the interference of redundant factors. (1) The bulk modulus and the absolute viscosity of the emulsion are constants. (2) Emulsions are incompressible fluids whose density is independent of temperature. (3) The HLHMDCUV has no internal leakage. (4) Cavitation is not considered.
2.2. Valve initial structural parameters
This paper designs and analyzes the HLHMDCUV. The rated pressure is 40 MPa, the rated flow rate is 1200 L/min, the density of emulsion is 890 kg/m3, and the dynamic viscosity of emulsion is 0.792×10-3 Pa·s. Based on the structural design and characterization, the initial structural parameters of HLHMDCUV are shown in Table 1.
The initial structural parameters are input into the two AMESim models shown in Figure 2, and the simulation duration is 40 s in total, using the signals shown in Figure 3 to simulate the action of a section of the hydraulic bracket; the variable throttle valve is completely closed at 0~10 s to simulate that the hydraulic bracket does not need to use fluid; the variable throttle valve is open at 10~30 s to simulate that the hydraulic bracket uses fluid; the variable throttle valve is closed at 30~40 s to simulate that the hydraulic bracket The variable throttle valve closes at 30~40 s, simulating that the hydraulic support does not need to use liquid. The following results can be obtained, as shown in Figure 4, Figure 5, Figure 6 and Figure 7.
In the case of the same parameters, as shown in Figure 4, in 0~10 s, the hydraulic support does not need to use liquid, the two forms of HLHMDCUV outlet pressure is equal, at this time, the pumping station system has just been started, there is no external signal interference, indicating that the two forms of static performance is the same, at this time, the unidirectional main spool of the HLHMDCUV is closed, the unloading of the main spool is completely open, the emulsion pump is in the state of complete unloading. At 10~30 s, the hydraulic bracket suddenly uses emulsion, and the outlet pressure of both forms drops to the lowest point in the same way, at this time, the unloading main valve spool of HLHMDCUV closes, and the emulsion pump supplies emulsion to the hydraulic bracket. At about 15 s, the HLHMDCUV outlet pressure of form b is the first to rise and quickly reaches the set value of 40 MPa with almost no overshooting, and then the pressure is steadily maintained at the set value; whereas, the HLHMDCUV outlet pressure of form a rises later than that of form b, and the rate of rise is lower than that of form a. There is 10% overshooting, which suggests that the dynamic performance of form b is inferior to that of form a. Figure 5 is the enlarged diagram of Figure 4 at 30 s. It can be seen that the variable throttle valve suddenly closes at 30 s, i.e., when the hydraulic bracket suddenly does not use the emulsion, the pressure pulsation is generated in the emulsion supply system, and both forms of HLHMDCUV complete the pressure unloading of the emulsion supply system within 0.1 s, and then maintain the pressure stability within the emulsion supply system within 10 s. The pressure is also stabilized within the emulsion supply system.
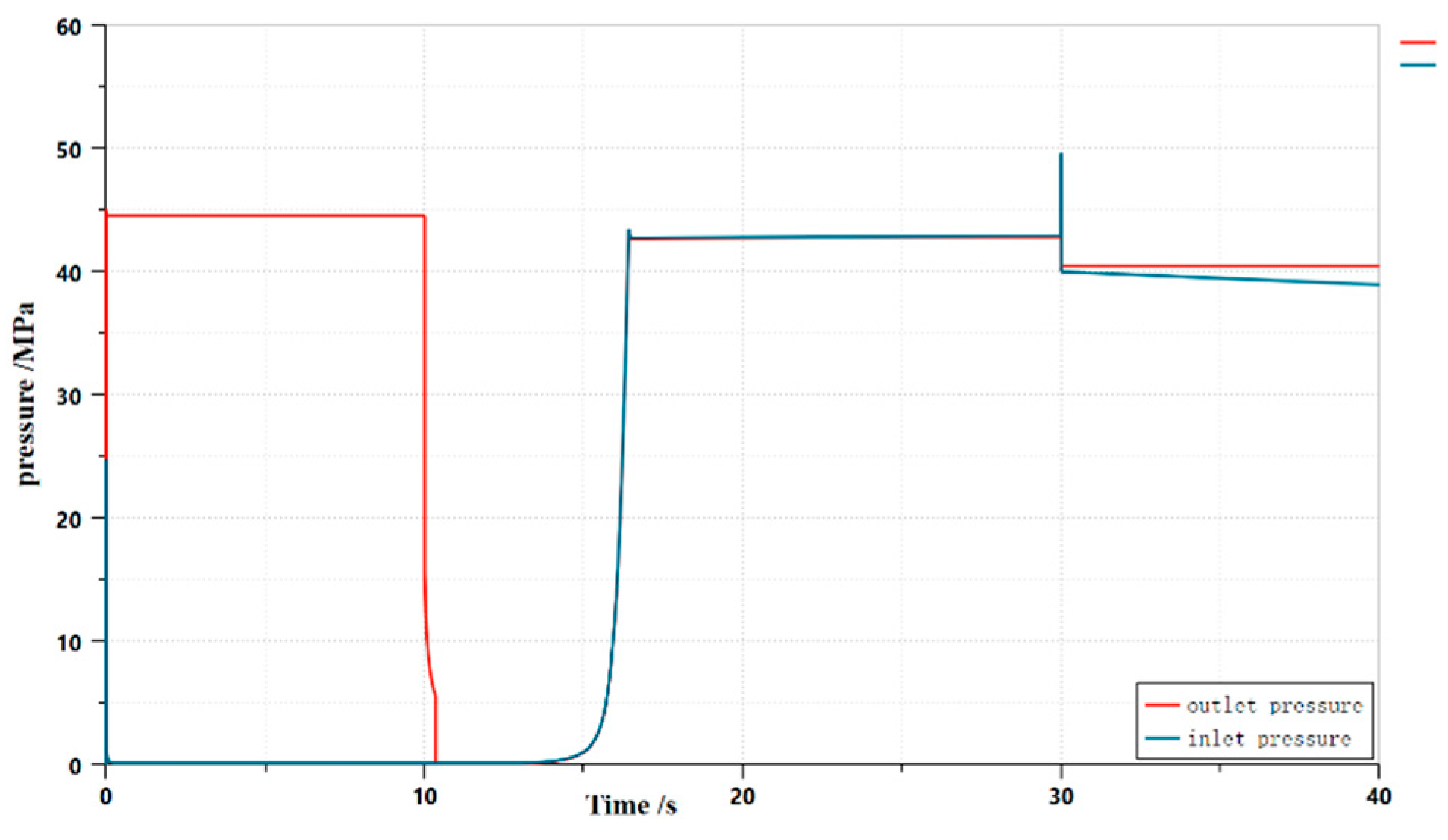
From Figure 6 and Figure 7, it can be seen that the inlet pressure of the HLHMDCUV of form a is very small and almost zero during unloading, while the inlet pressure of the HLHMDCUV of form b is only slightly lower than the outlet pressure during unloading. It means that when the HLHMDCUV causes the emulsion pump to unload, form a causes the pump to consume less energy and the system saves more energy.
Comprehensive comparison, the two installation forms of HLHMDCUV in the face of the hydraulic support conditions change, can quickly respond and maintain the pressure stability of the fluid supply system, reducing the traditional mechanical unloading valves and electromagnetic unloading valves frequent opening and closing of the pressure pulsation brought about by the unloading valve. While better dynamic performance can be obtained with form a, the performance difference between the two is only within 3 s. According to statistics in the coal mine generalized mining face normal work, emulsion pumping station in the unloading state of time occupies almost 80% of the entire working hours. That means HLHMDCUV needs to be unloaded for a long period of time during normal working hours at the generalized mining face of the underground coal mine. If HLHMDCUV adopts the installation method of form a, the emulsion pump is in the state of high load and high power consumption for a long time, which wastes huge electric energy and accelerates the damage of the emulsion pump, which is far away from the design intention of this paper, and also contrary to the purpose of the construction of the intelligent mine. Therefore, in this paper, the mounting form b is used for the subsequent research and application of HLHMDCUV.
Figure 3.
Setting value of variable throttle opening.
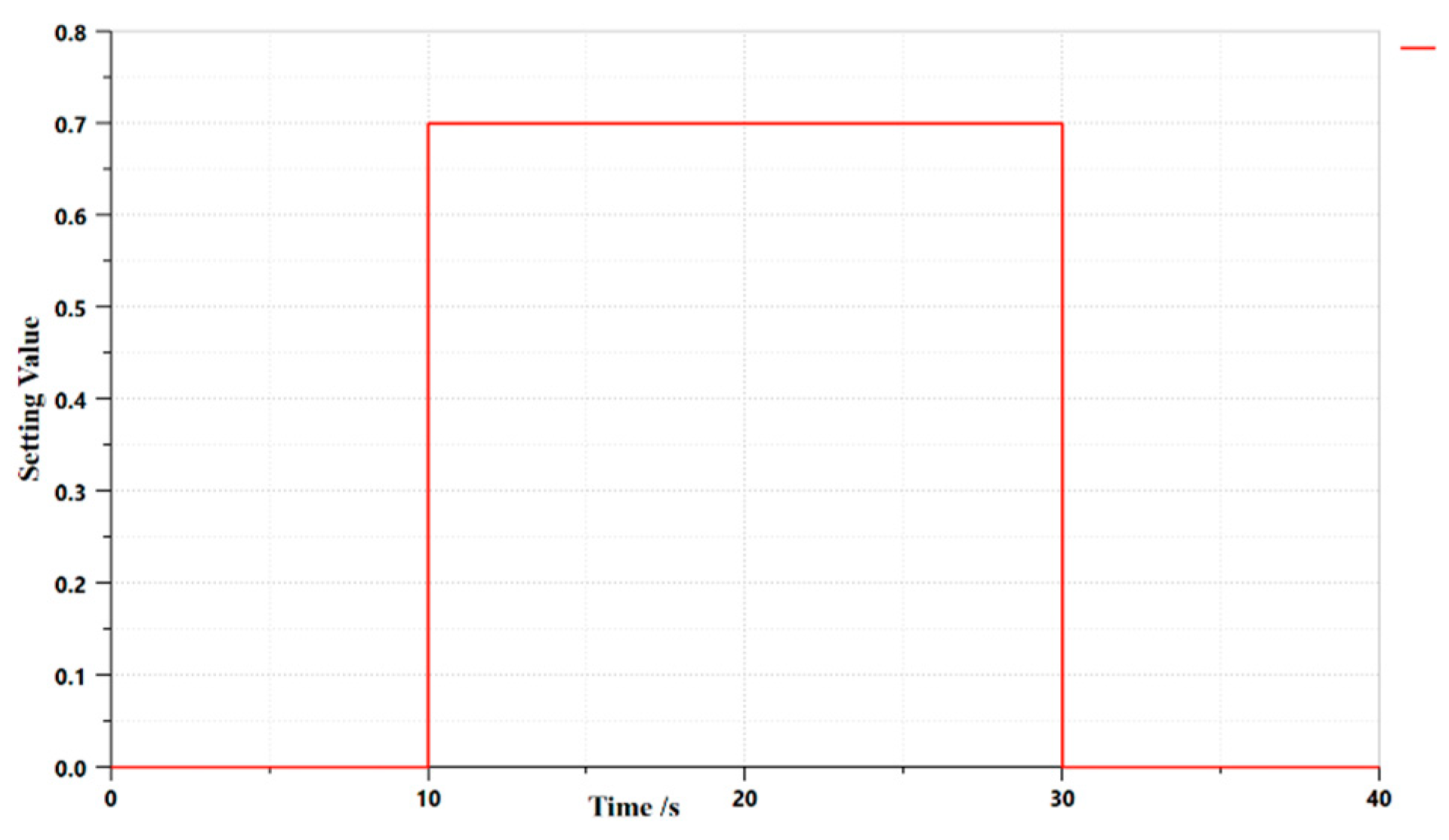
Figure 4.
Outlet pressure of HLHMDCUV.
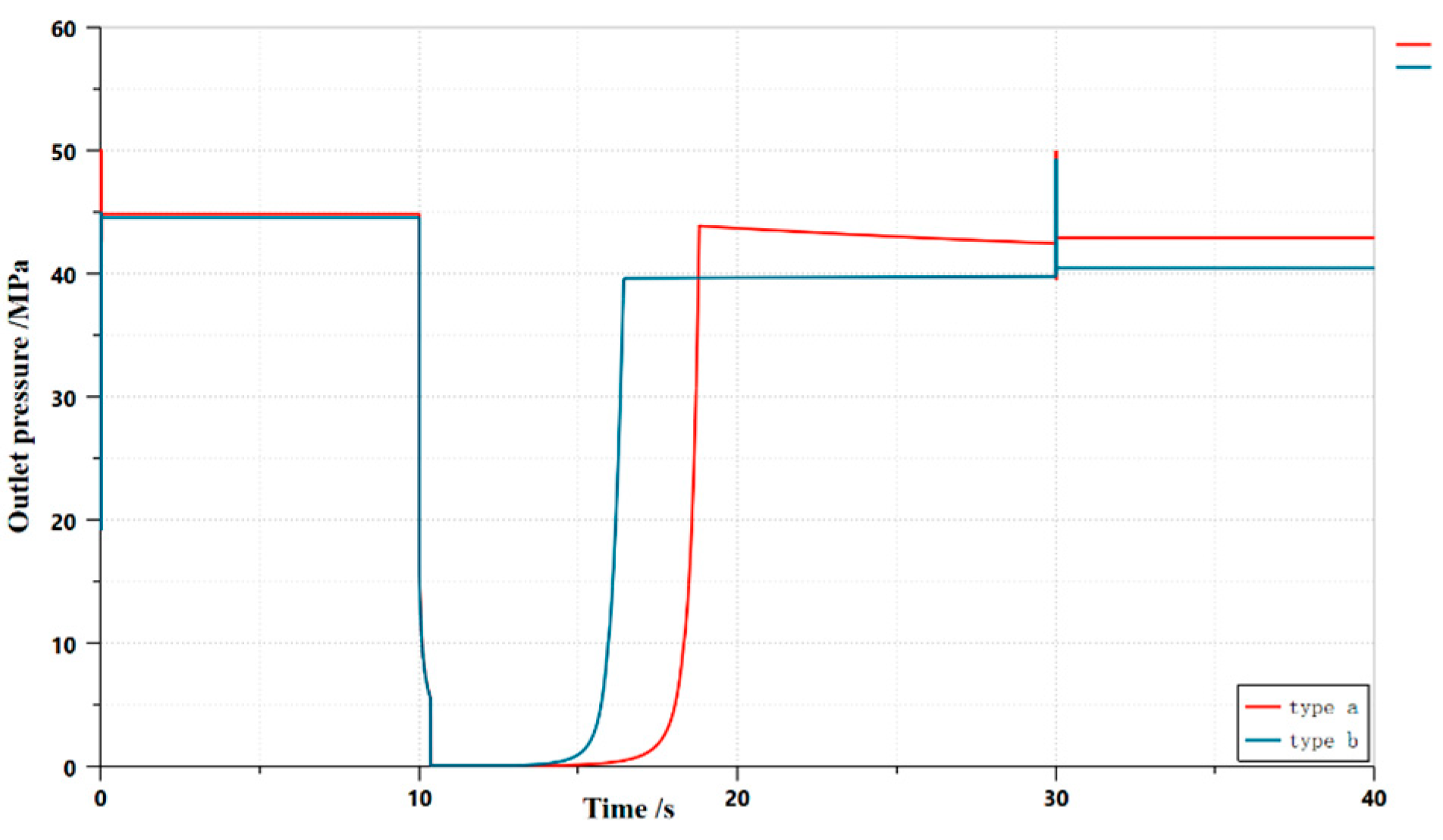
Figure 5.
Localized enlargement of HLHMDCUV outlet pressure diagrams.
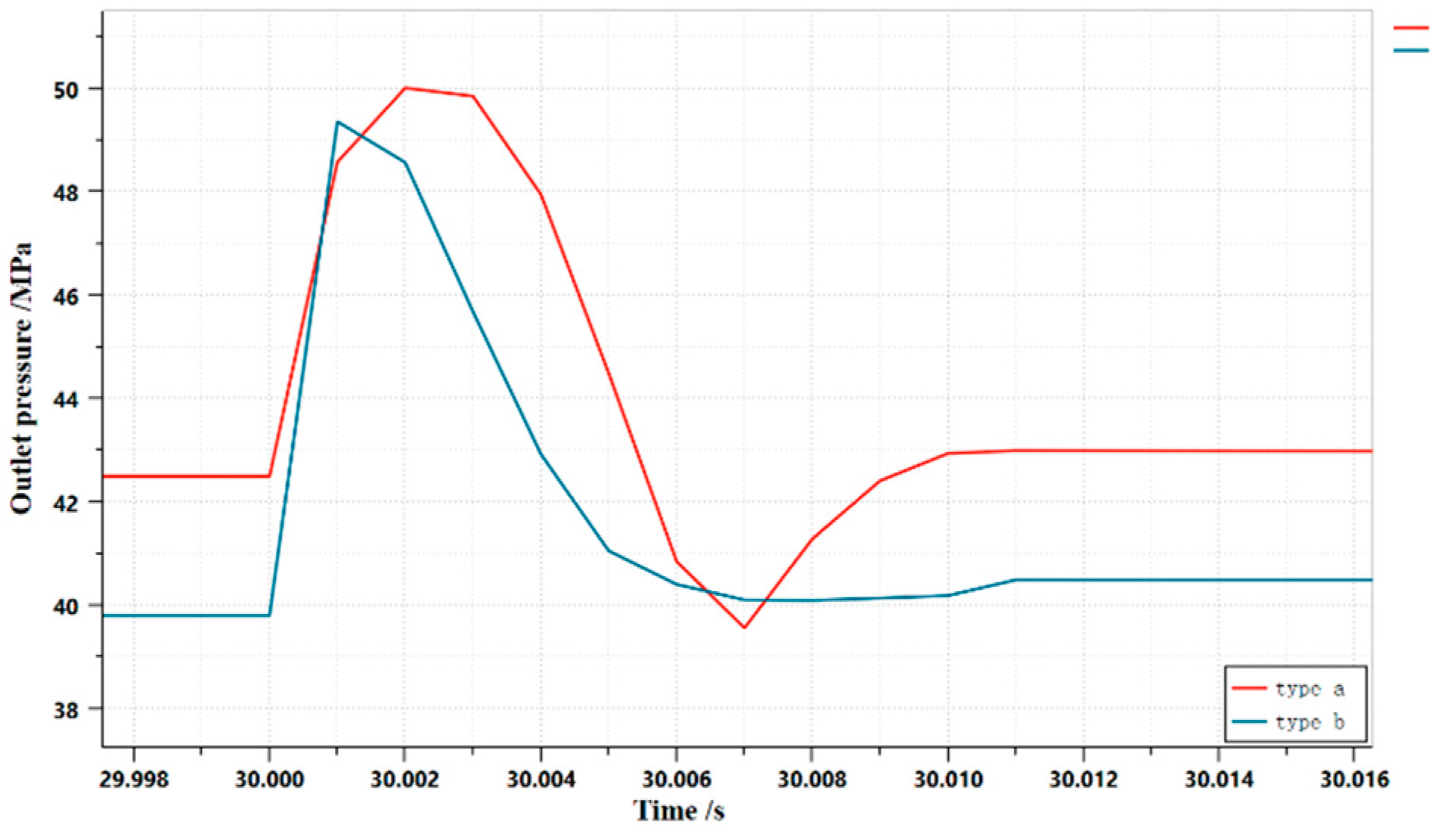
Figure 6.
Inlet and outlet pressures for form a.
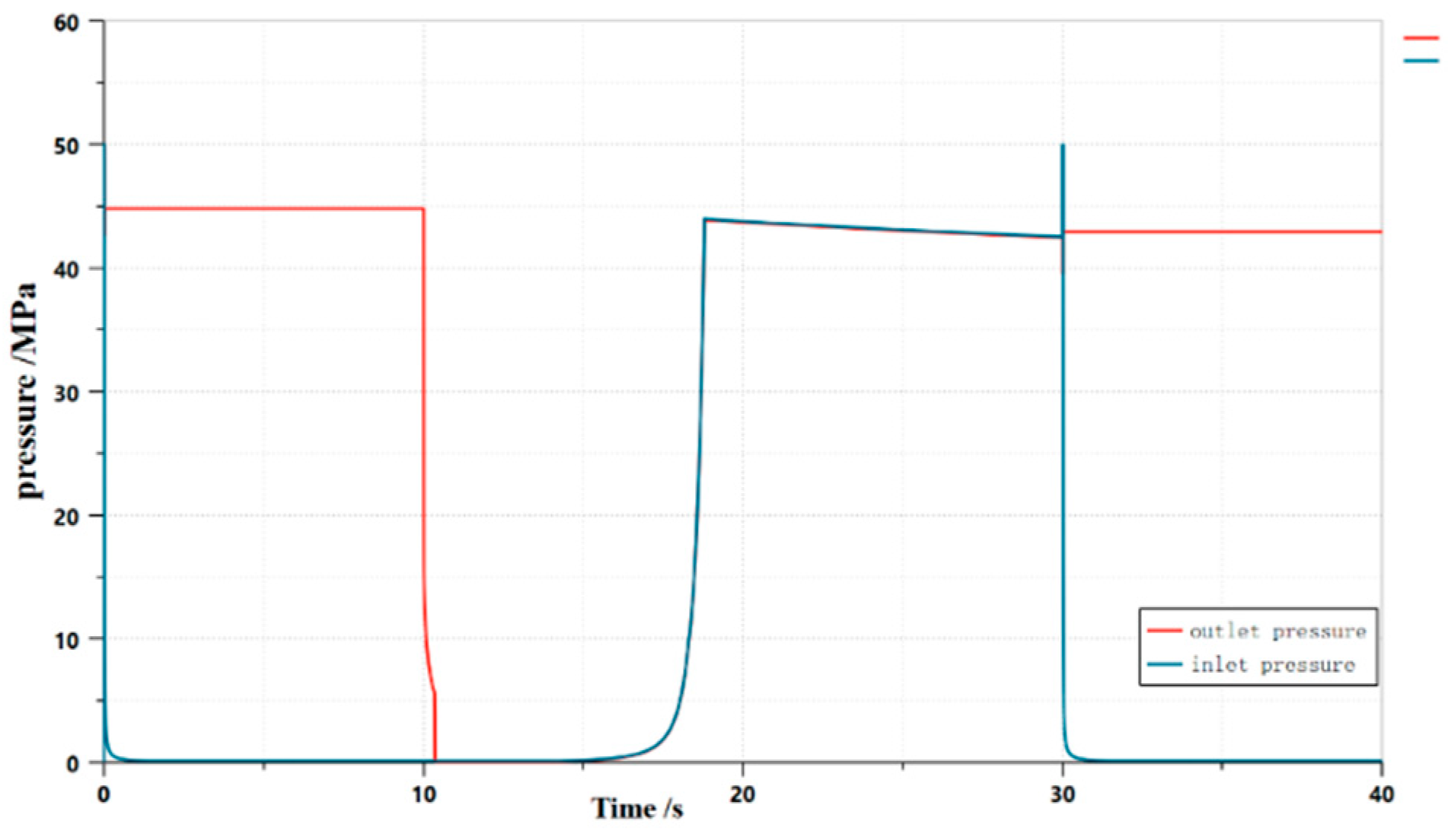
Figure 7.
Inlet and outlet pressures for form b.
2.1.2. Creo Simulation Model
In order to study the internal flow field distribution of the unloading valve during the working process, the flow field model of the relief valve was established by using the computational fluid dynamics (CFD) analysis method . Pressure, velocity and turbulent kinetic energy distributions of the unloading valve during the opening process and steady state are simulated and analyzed. The structural parameters affecting the performance and reliability of the unloading valve are directly obtained from internal cloud and streamline diagrams. Using the data obtained in the previous section, this paper uses Creo to model the unidirectional main spool, unloading main spool, digitally controlled pilot valve and unloading pilot valve of HLHMDCUV. As shown in Figure 8.
2.3. Mathematical modeling of the HLHMDCUV
As shown in Figure 9, the dynamic mathematical model of the unloading valve is based on two basic principles. force balance and flow continuity. In order to highlight the main influencing factors and achieve model simplicity, the following analysis ignores the secondary factors such as the liquid resistance of the over-liquid orifice. The mathematical model is described by the following equation.
(1) The differential equation of motion of the unloaded main spool, the
where is steady state hydrodynamic force acting on the main valve, the
is transient hydrodynamic forces acting on the main valve, the
is friction between the main spool and the valve body, the
(2) The differential equation of motion of the spool of a mechanically unloaded pilot valve, the
where is steady state hydrodynamic force acting on the pilot valve, the
is the transient hydrodynamic force acting on the pilot valve, the
where,
(3) The flow equation through the mechanical unloading pilot valve orifice, the
(4) Differential equations of motion for one-way valves, the
where is steady state hydrodynamic force acting on the one-way valves, the
is transient hydrodynamic forces acting on the main valve, the
(5) One-way main valve orifice flow equation, the
(6) The differential equation of motion of the solenoid proportional relief pilot valve spool, the
(7) The flow continuity equation for a digitally controlled pilot valve, the
where 、 are the liquid pressure in the upper and lower cavities of the unloading main valve spool respectively, in Pa.
、 are the load pressure and the fluid pressure in the front chamber of the control piston, respectively, in Pa.
、 are the effective area of the upper and lower cavities of the main spool respectively, in m2.
、、 are he effective area of the mechanical unloading pilot valve, the effective area of the one-way valves, and the effective area of the control piston, respectively, in m2.
、、 are outlet diameter of the unloading main valve, outlet diameter of the mechanical unloading pilot valve, and outlet diameter of the one-way valves, respectively, in m.
、 are diameter of the damping hole of the unloading main valve, and the diameter of the damping hole between the one-way valves and the control piston, respectively, in m.
、、 are damping orifice length of the unloading main valve, damping orifice length of the mechanical unloading pilot valve, and damping orifice length between the one-way valves and the control piston, respectively, in m.
、 are half cone angle of unloading main valve, half cone angle of one-way valves, respectively.
、、 are flow coefficient of unloading main valve, pilot valve, one-way valves orifice, respectively.
is flow coefficient of the damping orifice of the unloading main valve, respectively.
、、 are the relief flow rate of the unloading main valve, the relief flow rate of the mechanical unloading pilot valve, and the relief valve of the one-way valves, respectively, in ;
、、 are opening volume of unloading main spool, opening volume of mechanical unloading pilot spool, opening volume of one-way valves, respectively, in m.
y、x、 are opening volume of the unloading main valve, opening volume of the mechanical unloading pilot valve, and opening volume of the one-way valves, respectively, in m.
、、 is spring stiffness of the unloading main valve, spring stiffness of the mechanical unloading pilot valve, spring stiffness of the one-way valves, respectively, in N/m.
、、 is mass of unloaded main spool, mass of mechanically unloaded pilot spool, mass of check spool, respectively, in kg.
is digitally controlled pilot valve coulomb friction.
is digitally controlled pilot valve displacement.
is digitally controlled pilot valve cavity pressure.
is digitally controlled pilot spool viscous damping coefficient.
is current-force gain.
is digitally controlled pilot valve hydrodynamic coefficient.
is digitally controlled pilot valve effective cross-sectional area.
is throttle port flow coefficient in front of pilot valve cavity.
b is digitally controlled pilot valve flow coefficient.
is digitally controlled pilot valve liquid chamber volume.
E is modulus of elasticity of emulsion.
is digitally controlled pilot valve effective cross-sectional area.
Figure 9.
Structure and principle diagram of HLHMDCUV.
3. Results and conclusions
This paper focuses on the operating characteristics of emulsion pumping stations with HLHMDCUV applied. The magnitude of the inlet and outlet pressures of the unloading valve when the downhole hydraulic support is not in use, i.e., when the emulsion pumping station is unloaded, is a strong indicator of the HLHMDCUV. Assuming that the mechanical efficiency of the dosing pump is not considered, the dynamic characteristic curve is obtained by simulation using the AMESim model in Figure 2(a).
The parameters are kept constant and the inlet and outlet pressures of HLHMDCUV are obtained as in Figure 10. The inlet pressure is the pressure at which the emulsion pump is unloaded and the outlet pressure is the pressure within the supply system. It can be seen that the characteristics of the HLHMDCUV inlet are the loading characteristics of the emulsion pumping station. The first 30 s of simulation time is to get the whole model into working condition. Now focus only on the pressure-time curve during the simulation time 29.99 ~ 30.04 s, as shown in Figure 11.
3.1. Dynamic characterization based on AMESim
3.1.1. Effect of spring preload of digitally controlled pilot valve on dynamic characteristics of HLHMDCUV
The spring preload of the digitally controlled pilot valve is changed and other structural parameters remain unchanged. the outlet pressure of the HLHMDCUV is shown in Figure 12.
From the simulation results, it can be seen that an increase in the spring preload of the digitally controlled pilot valve causes an increase in the outlet steady state pressure of the HLHMDCUV. The increase in spring preload of the digitally controlled pilot valve also increases the maximum overshoot of the outlet pressure of the HLHMDCUV. The change in spring preload of the digitally controlled pilot valve does not affect the dynamic response time of the HLHMDCUV.
At the same time, the movement of the mechanical unloading pilot valve at steady state is also affected, as shown in Figure 13.
From the simulation results, it can be seen that when the spring preload of the digitally controlled pilot valve is too small and too large, the mechanical unloading pilot valve shows rapid fluctuations in flow rate at the steady state of HLHMDCUV, while when the spring preload of the digitally controlled pilot valve is 30 N, the flow rate of the mechanical unloading pilot valve does not have any obvious and rapid fluctuations at the steady state of HLHMDCUV.
3.1.2. Effect of spring preload on the dynamic characteristics of HLHMDCUV by mechanical unloading pilot valve
At the beginning of the design, the preload of the mechanical unloading pilot valve is a fixed value, according to Figure 9, the value of the
where P is -Spring preload for HLHMDCUV.
From the above equation, it is clear that the spring preload of the mechanical unloading pilot valve is a fixed value, so its effect on the dynamic characteristics of the HLHMDCUV will not be discussed here.
3.1.3. Effect of spring preload on the dynamic characteristics of HLHMDCUV for one-way main valves
The spring preload is varied in one direction and other structural parameters are kept constant, the outlet pressure of the HLHMDCUV is shown in Figure 14.
From the simulation results, it can be seen that when the spring preload of the one-way main valve is increased, it increases the outlet steady state pressure of the HLHMDCUV. When the spring preload of the one-way main valve is increased, the outlet pressure of the HLHMDCUV enters the steady state in a shorter time and also reduces the pressure fluctuation at the outlet. And the change of spring preload of the one-way main valve has no significant effect on the maximum overshoot at the outlet of HLHMDCUV。
3.1.4. Effect of spring preload of unloading main valve on dynamic characteristics of HLHMDCUV
The spring preload of the unloading main valve is varied and other structural parameters are kept constant, the outlet pressure of the HLHMDCUV is shown in Figure 15.
From the simulation results, it can be seen that the steady state value of the outlet pressure of the HLHMDCUV decreases when the spring preload of the unloading main valve is increased.
3.1.5. Effect of damping holes on dynamic properties
(1) Damping hole in front of pilot valve cavity
Change the diameter of the damping hole in front of the pilot valve cavity and keep other structural parameters unchanged, the outlet pressure of HLHMDCUV is shown in Figure 16.
From the simulation results, it can be seen that when the diameter of the damping orifice in front of the pilot valve cavity increases, the outlet pressure of HLHMDCUV decreases as a whole, and the amount of overshooting also decreases. But the time to reach the steady state is almost constant.
Change the length of the damping hole in front of the pilot valve cavity and keep other structural parameters unchanged. the outlet pressure of the HLHMDCUV is shown in Figure 17.
From the simulation results, it can be seen that when the length of the damping orifice in the front chamber of the pilot valve increases, the outlet pressure of the HLHMDCUV decreases as a whole, and the amount of overshooting also decreases. But the time to reach the steady state is almost constant.
(2) Damping hole in the upper chamber of the unloading main valve
The diameter of the damping hole in the upper chamber of the unloading main valve is changed and other structural parameters remain unchanged. the outlet pressure of the HLHMDCUV is shown in Figure 18 and Figure 19.
From the simulation results in Figure 18, it can be seen that in 10 ~ 30 s, when the diameter of the damping hole in the upper chamber of the unloading main valve is granted to be large, the rise time of the HLHMDCUV outlet pressure is significantly shortened, and the time to enter the steady state pressure is shorter, and at the same time the amount of overshooting is also reduced. As can be seen in Figure 19, when the hydraulic support is not using fluid, that is, when the pump station begins to unload, with the increase in the diameter of the damping hole in the upper chamber of the unloading main valve, the overshooting of the HLHMDCUV outlet pressure decreases, the time to enter the steady state is shorter, and the steady state pressure decreases.
Change the length of the damping holes in the upper chamber of the unloading main valve and keep other structural parameters unchanged. The outlet pressure of HLHMDCUV is shown in Figure 20.
From the simulation results, it can be seen that when the length of the damping orifice in the upper chamber of the unloading main valve increases, the steady state value of the outlet pressure of HLHMDCUV increases.
3.2. Structural optimization
Based on the results of the simulation, the factors affecting the dynamic response characteristics are analyzed and the initial structure of the HLHMDCUV is optimized to improve the dynamic response. The optimized structural parameters of the HLHMDCUV are shown in Table 2.
The simulation analysis of the optimized HLHMDCUV is carried out and the comparison between the optimized and initial values is shown in Figure 21 and Figure 22. From Figure 21, it can be seen that after optimizing the parameters of HLHMDCUV, the time for the outlet pressure to enter the steady state value when the emulsion pumping station is in the loaded state within 10 ~ 30 s is shortened by 3.507 s compared to the initial parameters, and the outlet pressure does not exceed the preset value. From Figure 22, it can be seen that the outlet steady state pressure of HLHMDCUV is closer to the preset value when the emulsion pumping station is in the unloaded state after optimization.
3.3. Simulation of the flow field inside the unloading main valve
3.3.1. Flow Field Simulation Model
The internal flow field in the vicinity of the spool of the unloading main valve was analyzed by Fluent software using the Creo 3D model established in the previous section. The boundary conditions of the model are pressure inlet and pressure outlet. The inlet pressure is the pressure at the unloading transient and the outlet pressure is atmospheric pressure. The effect of temperature is not considered and the emulsion medium is treated as incompressible.
3.3.2. Analysis of results
The calculation results are shown in Figure 23, Figure 24, Figure 25, Figure 26, Figure 27 and Figure 28, and the analysis of the calculation results shows that.
(1) When the emulsion passes through the valve port, in the corner of the flow through the valve port, due to a sudden decrease in the area of the throttling cross-section, the thin-walled orifice characteristics are enhanced, resulting in an increase in the flow rate, a rapid decrease in pressure, and an increase in the kinetic energy of turbulence.
(2) At the chamfer of the valve seat, the area of strong turbulence intensity, a clear negative pressure zone appears. This is because when the fluid passes through the gap between the spool and the seat, the flow bundle shrinks rapidly, and the velocity gradient increases rapidly, producing a high-speed jet. According to Bernoulli's equation, the pressure is lowest at the inlet beam contraction section, thus forming a low-pressure zone. This is most likely to produce cavitation, cavitation phenomenon. Cavitation not only reduces the volumetric efficiency of the valve, but also deteriorates the dynamic characteristics of the unloading valve, causing oscillations. This also increases the energy loss of the unloading valve and increases the fluid noise.
(3) The degree of cavitation has a direct relationship with the pressure and range of the low-pressure region. From Figure 28 comparing different unloading main spool half cone angle, it can be seen that the air pockets generated by the region is basically the same, all appear in the opening gap near the sharp edge area. And too much turbulent kinetic energy, increasing the energy local loss of fluid transmission, reducing the energy utilization. From the figure, it can also be seen that after increasing the half cone angle of the unloading main valve spool, the cavitation area shrinks significantly, and the intensity and range of turbulent kinetic energy are also significantly reduced. This not only makes the generation and development of cavitation phenomenon is effectively controlled, but also reduces the fluid drive when the heat loss, saving energy.
4. HLHMDCUV Manufacturing and Applications
4.1. Manufacture of the HLHMDCUV
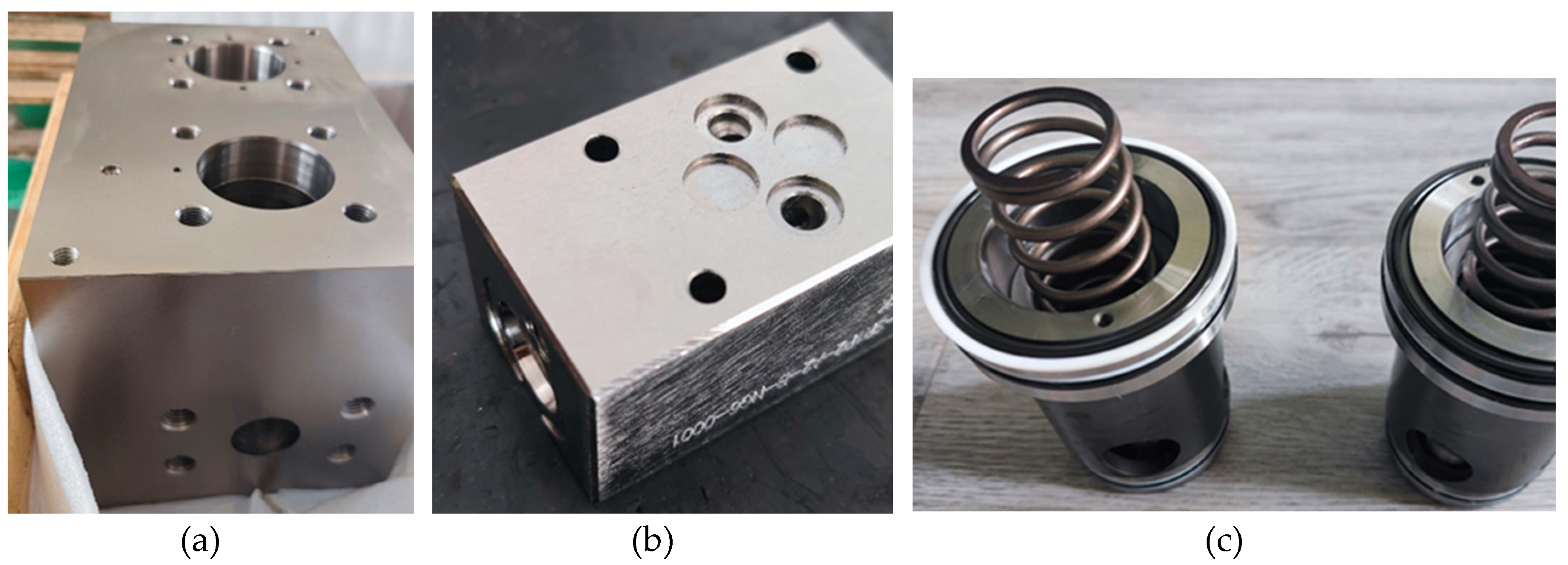
Based on the actual needs of the working face environment in underground coal mines, under the premise of ensuring safety and reliability, and pursuing the economic benefits of component processing and mine transformation, combined with the theoretical analysis and research in the previous section, HLHMDCUV is designed as a modularized form that is easy to disassemble and assemble, as shown in Figure 29.
In this paper, HLHMDCUV is modularized for easy disassembly and assembly; the spare parts can be replaced in real time when problems are found in the production of coal mines; the safety and reliability of the system is ensured and the service life of the fluid supply system is prolonged without affecting the production in an orderly manner. It has been experimentally tested that a skilled pump station maintenance worker can disassemble the HLHMDCUV upon first seeing it; replacing individual parts can take up to 15 minutes. After only a few training sessions, the maximum time to replace a single part is 5 minutes.
Figure 30.
Selected modules of the HLHMDCUV
After the performance test of the valve, after the completion of the manufacturing of HLHMDCUV sealing performance is good, no external leakage; good dynamic performance, unloading pressure is stable; regulating the pressure range is large, and can be adjusted according to the actual work, the adjustment method is simple and quick; pressure loss is small.
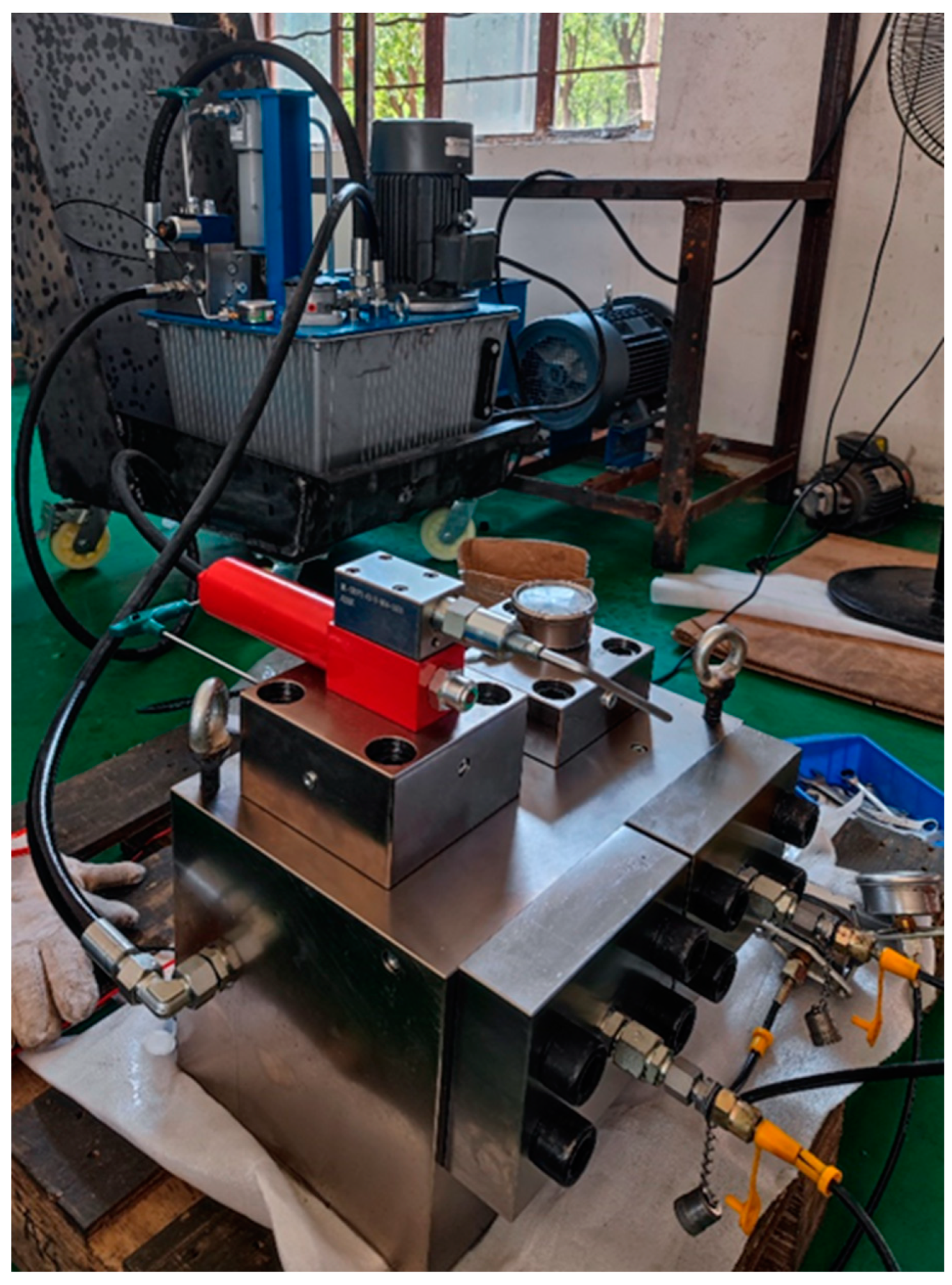
Figure 31.
Performance test of HLHMDCUV.
4.2. Application of HLHMDCUV
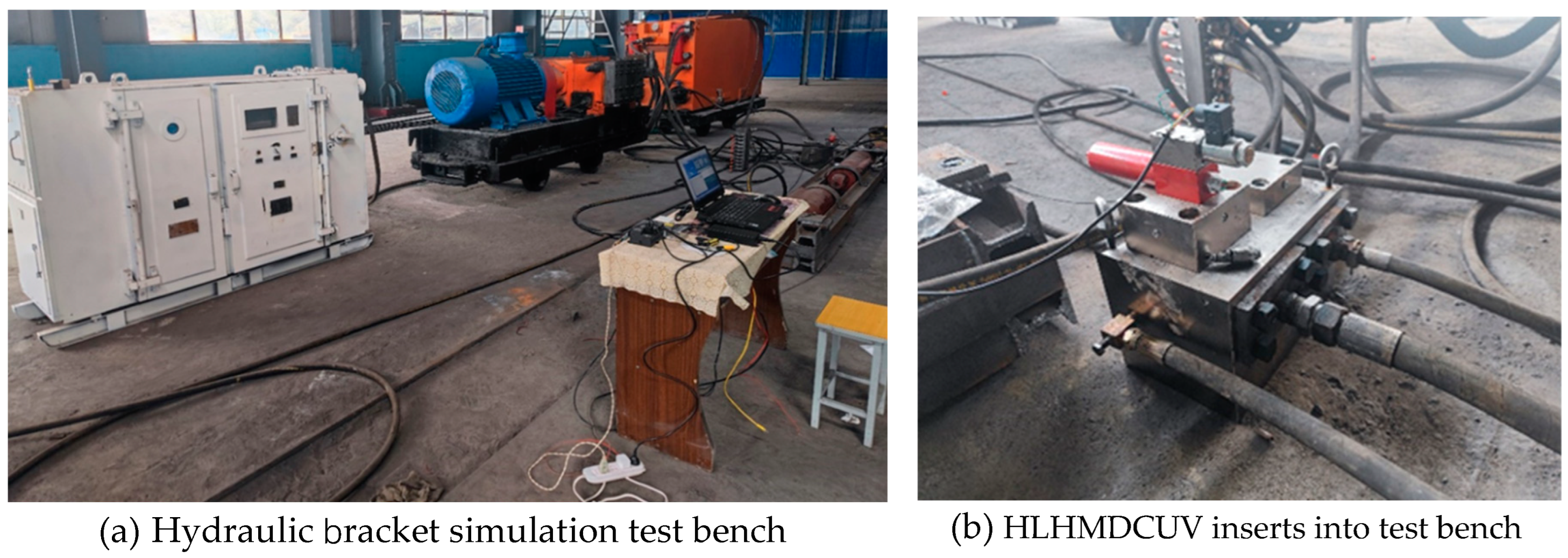
After installing HLHMDCUV on the simulation test bench of underground hydraulic support and connecting it to the intelligent control system of the test bench, it has been running stably for more than 300 hours.
Figure 32.
Downhole working face simulation lab bench with the addition of HLHMDCUV
As can be seen from Figure 33, in the actual use of the process, when the hydraulic support needs to use liquid, the use of HLHMDCUV eliminates the unloading valve outlet, i.e., the pressure fluctuations at the outlet of the pumping station, eliminating the unloading valve noise, whistling; at the same time reduces the pressure impacts received by the liquid supply system, prolonging the service life of the liquid supply system.
In addition, HLHDCUV uses PLC as the controller, which can be accessed to the computer digital control system, transforming the emulsion pumping station and providing support for intelligent transformation of the hydraulic bracket fluid supply system.
5. Conclusion
This paper analyzes the dynamic characteristics and flow field characteristics of a digitally controlled high-pressure, high-flow, high water-based unloading valve HLHMDCUV for use in underground coal mines, and at the same time combines with the actual production of coal mines to design and manufacture a prototype of the HLHMDCUV, and conducts performance experiments on it. It provides a theoretical basis for the design of such valves, and at the same time long-term experiments to verify its reliability.
The AMESim simulation analysis shows that the spring preload of the digitally controlled pilot valve, the spring preload of the check main valve, the spring preload of the unloading main valve, and the size of the damping holes in the upper chamber of the unloading main valve have a significant effect on the dynamic characteristics of the HLHMDCUV. Through analytical studies, the optimized structure of HLHMDCUV improves the dynamic response speed and the steady state value of outlet pressure coincides with the preset value.
Fluent's research and analysis shows that the unloading main spool half cone angle is designed as 60°, which significantly reduces the cavitation cavitation phenomenon of the unloading main valve port, and effectively avoids the shock and whistling of the unloading of HLHMDCUV. Reduced the unloading heat phenomenon, saving energy.
HLHMDCUV is easy to install and highly reliable. Without the need to modify the emulsion pumping station, HLHMDCUV can be easily connected to most of the current emulsion pumping stations, providing support for the intelligent transformation of the hydraulic bracket fluid supply system.
Working in conjunction with a digital control system is an advantage of the HLHMDCUV, which has a shorter time to reach a steady state and almost zero pressure overshoots at different working pressure flow rates.
Funding
This work is supported by the National Natural Science Foundation of China (Grant No. U1910212).
Conflicts of Interest
The authors declare no conflict of interest.
References
- J. P. Leng, K. L. Xing, and P. P. Zhang, “Dynamic analysis of cartridge style pilot relief valves,” Applied Mechanics and Materials, vol. 405–408, pp. 3279–3283, 2013. [CrossRef]
- C. J. Sang and J. H. Kang, “Orifice design of a pilot-operated pressure relief valve,” Journal of Pressure Vessel Technology, vol. 139, no. 3, 2017. [CrossRef]
- K. Dasgupta and J. Watton, “Dynamic analysis of proportional solenoid controlled piloted relief valve by bondgraph,” Simulation Modelling Practice and 5eory, vol. 13, no. 1, pp. 21–38, 2005. [CrossRef]
- K. Dasgupta and R. Karmakar, “Dynamic analysis of pilot operated pressure relief valve,” Simulation Modelling Practice & 5eory, vol. 10, no. 1-2, pp. 35–49, 2002. [CrossRef]
- X. Lei and Y. Wu, “Simulation and result analysis of AMEsim for the relief valve dynamic characteristics experiment,” in Proceedings of the International Conference on Electrical and Control Engineering, pp. 5587–5590, Wuhan, China, June 2010. [CrossRef]
- C. Vallet, J. Ferrari, J. F. Rit et al., “Single phase CFD inside a water safety valve,” in Proceedings of the ASME 2010 Pressure Vessels and Piping Division/K-PVP Conference, pp. 335–342, Bellevue, WA, USA, July 2010.
- Q. H. Hao, W. R. Wu, X. J. Liang, and Z. Liu, “Effects of Structure Parameters on Abnormal Opening of Pilot-Operated Relief Valve Under Alternating Pressurem,” IEEE Access, vol. 7, pp. 33932–33942, 2019. [CrossRef]
- Y. Deng and Z. Liu, “Optimal design of pilot proportional relief valve’s structural parameters in giant forging hydraulic press,” in Proceedings of the Second International Conference on Intelligent System Design and Engineering Application, pp. 412–416, IEEE, Hainan, China, January 2012.
- Gad, “Comprehensive nonlinear modeling of a pilot operated relief valve,” Journal of Dynamic Systems Measurement & Control, vol. 135, no. 1, Article ID 011011, 2013. [CrossRef]
- G. Yongjun, W. Zuwen, X. Jie, and Z. Zengmeng, “Simulation and experiments study on water hydraulic pressure relief valve with pilot stage,” Journal of Mechanical Engineering, vol. 46, no. 24, pp. 136–142, 2010.
- Y. Zhongjiong, L. Hongbin, Z. Liqiang, and L. Yaozhong, “Simulation of self-excited vibration behavior of pilot valve core on pilot-operated pressure relief valve with strong vibration,” Journal of Huazhong University of Science and Technology, vol. 43, no. 4, pp. 58–63, 2015.
- J. Ruan, P. R. Ukrainetz, and R. Burton, “Frequency domain modelling and identification of 2D digital servo valve,” International Journal of Fluid Power, vol. 1, no. 2, pp. 49–59, 2000. [CrossRef]
- M. Xuyao, L. Bin, L. Yiou, H. Junhua, and L. Qiwei, “Design & simulation of a hydraulic back pressure valve with a large flow range,” Journal of Physics: Conference Series, vol. 1213, no. 4, 2019. [CrossRef]
- X. Y. Mao and J. H. Hu, “Characteristic Analysis of a Water Hydraulic Pilot-operated Pressure-Reducing Valve,” in Proceedings of 3rd International Conference on Advances in Energy, Environment and Chemical Engineering, vol. 69, Chengdu, China, May 2017. [CrossRef]
- E. Lisowski and G. Filo, “Analysis of a proportional control valve flow coefficient with the usage of a CFD method,” Flow Measurement and Instrumentation, vol. 53, pp. 269–278, 2017. [CrossRef]
- M. Georgy, “Makaryants. Fatigue failure mechanisms of a pressure relief valve,” Journal of Loss Prevention in the Process Industries, vol. 48, pp. 1–13, 2017.
- G. Mu, F. Wang, X. Mi, and G. Gao, “Dynamic modeling and analysis of compressor reed valve based on movement characteristics,” Applied 5ermal Engineering, vol. 150, pp. 522–531, 2019. [CrossRef]
- V. Sverbilov, D. Stadnick, and G. Makaryants, “Study on dynamic behavior of a gas pressure relief valve for a big flow rate,” in Proceedings of the ASME/BATH 2013 Symposium on Fluid Power and Motion Control, Sarasota, FL, USA, October 2013.
- Qing-liang Zeng , Ming-qian Tian,Characteristic Analysis of Digital Large Flow Emulsion Relief Valve. Hindawi Mathematical Problems in Engineering Volume 2020, Article ID 5820812, 18 pages. [CrossRef]
Figure 1.
Two mounting forms of HLHMDCUV.
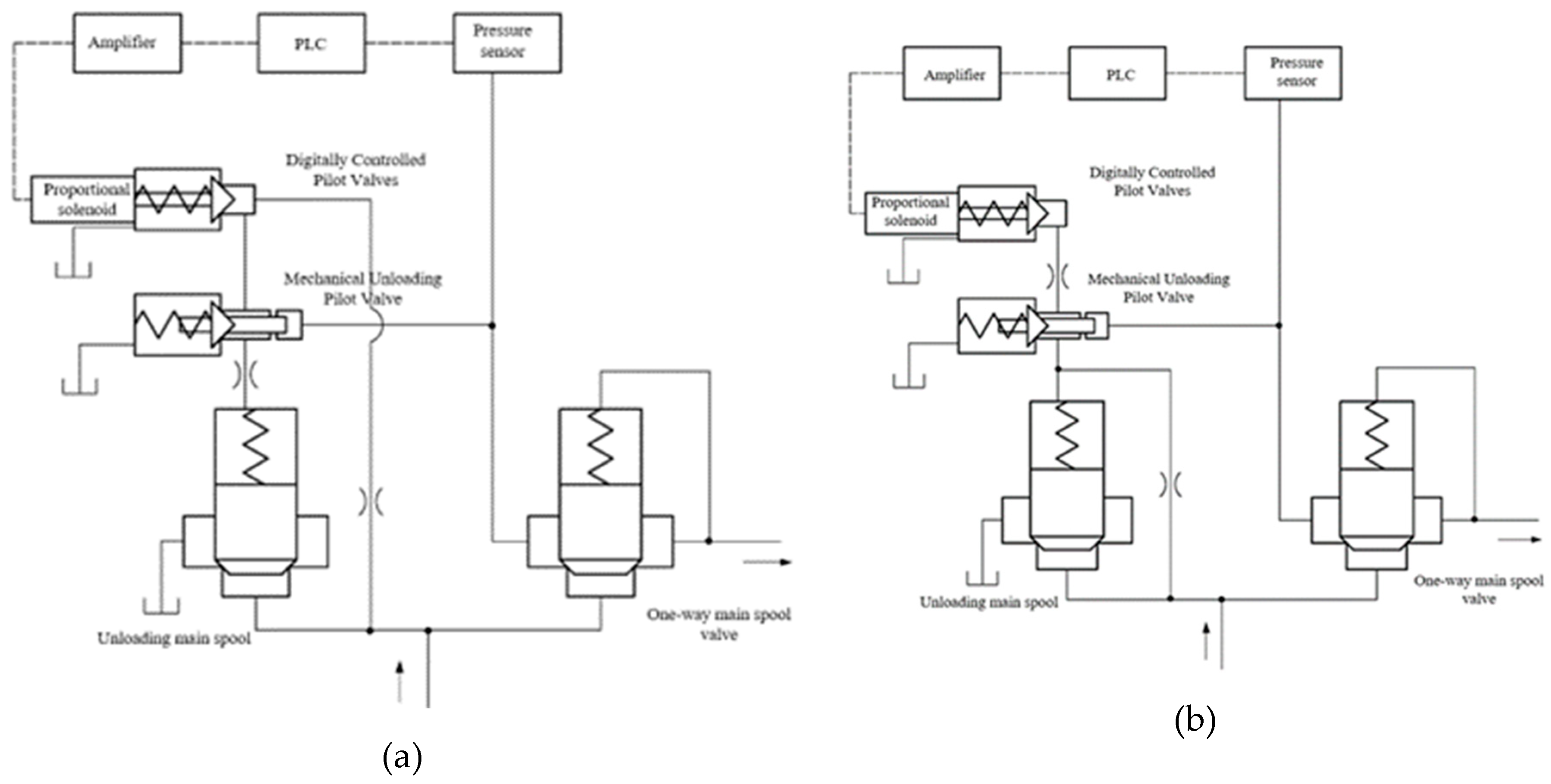
Figure 2.
AMESim simulation model.
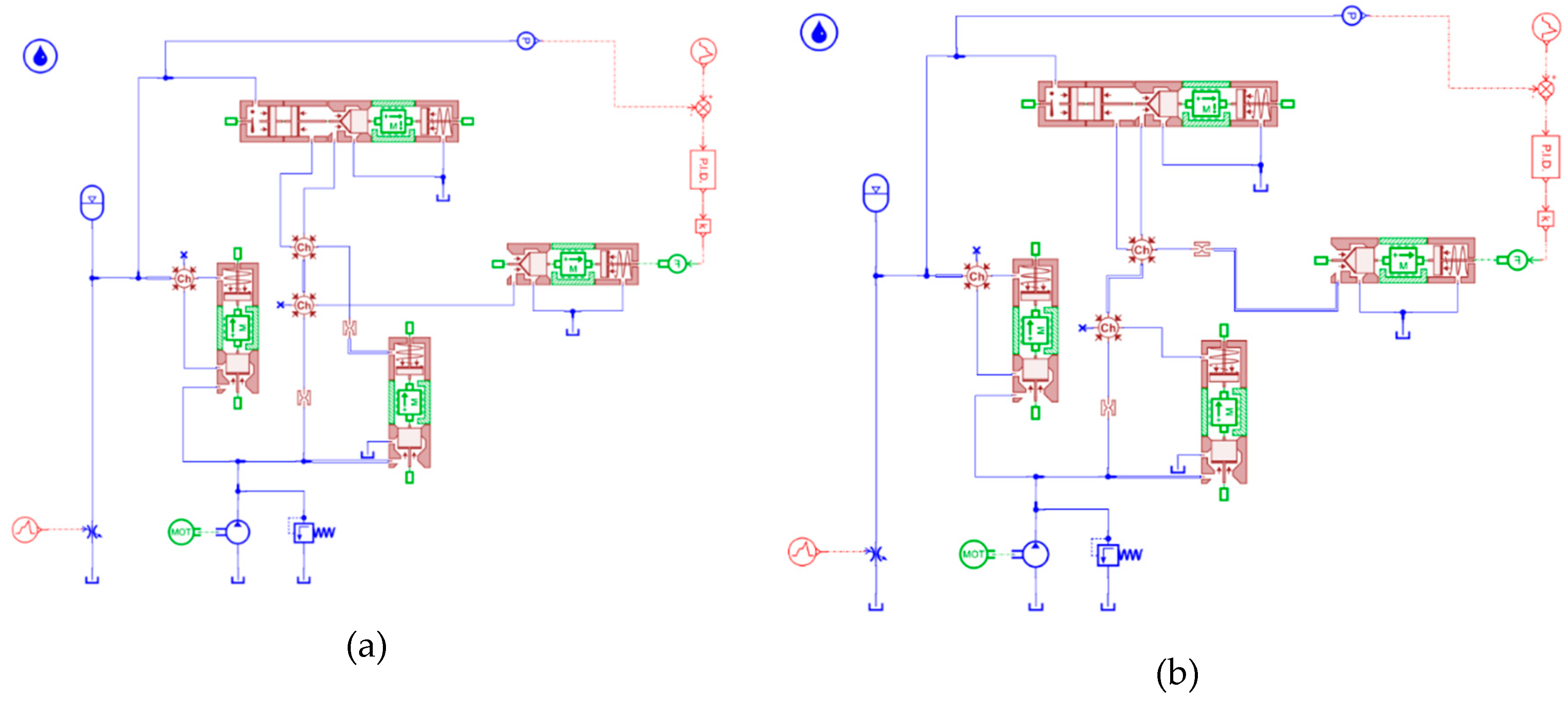
Figure 8.
Creo model of HLHMDCUV.
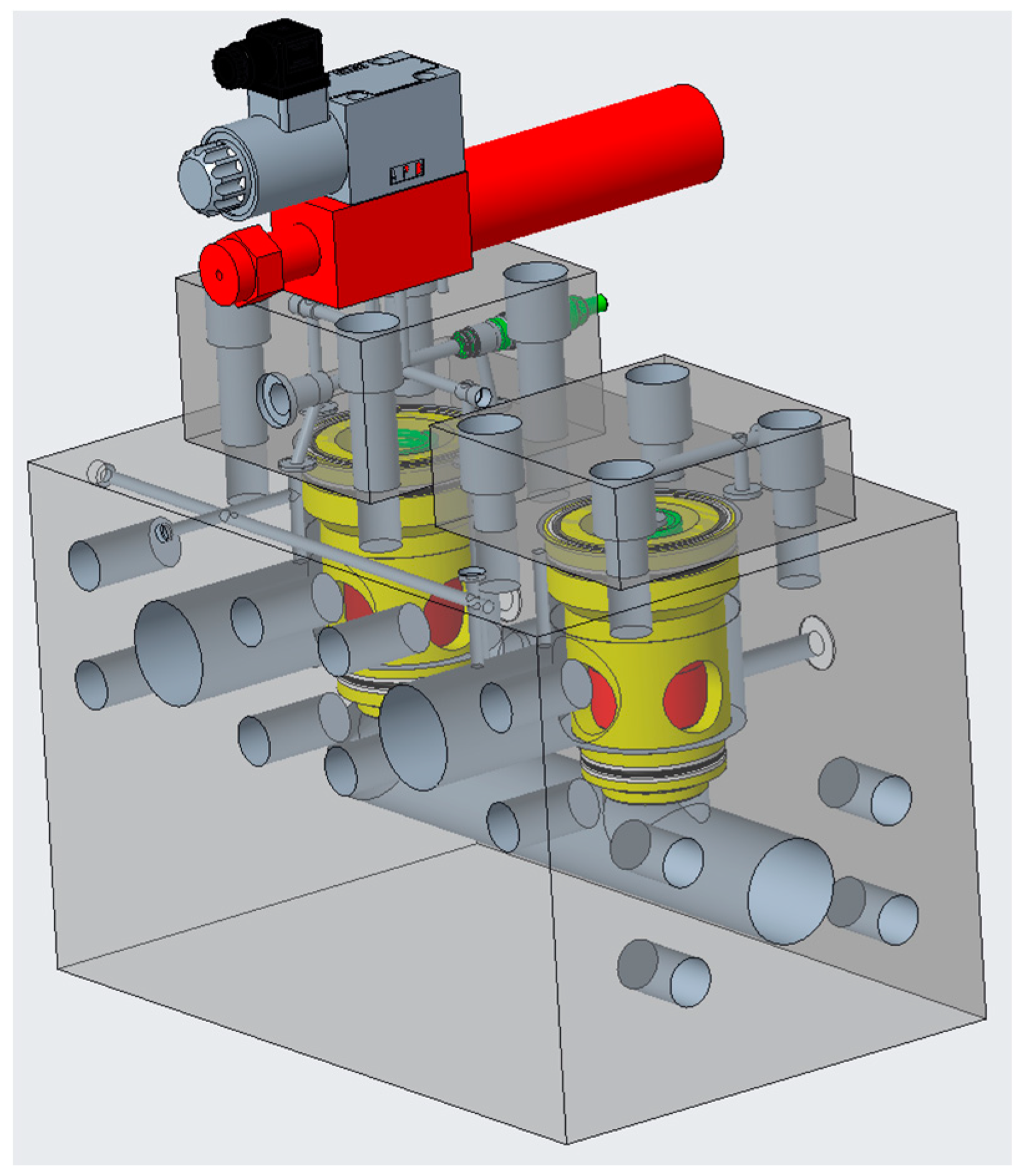
Figure 10.
Dynamic characteristic curve.
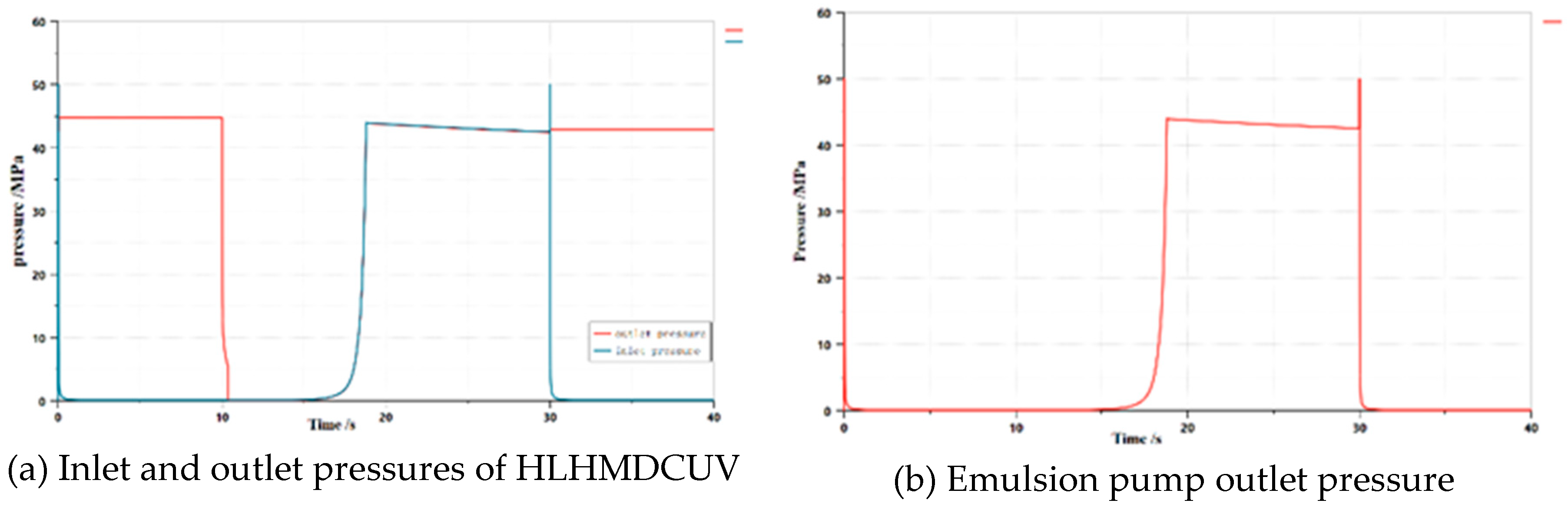
Figure 11.
Localized enlargement of HLHMDCUV inlet and outlet pressures.
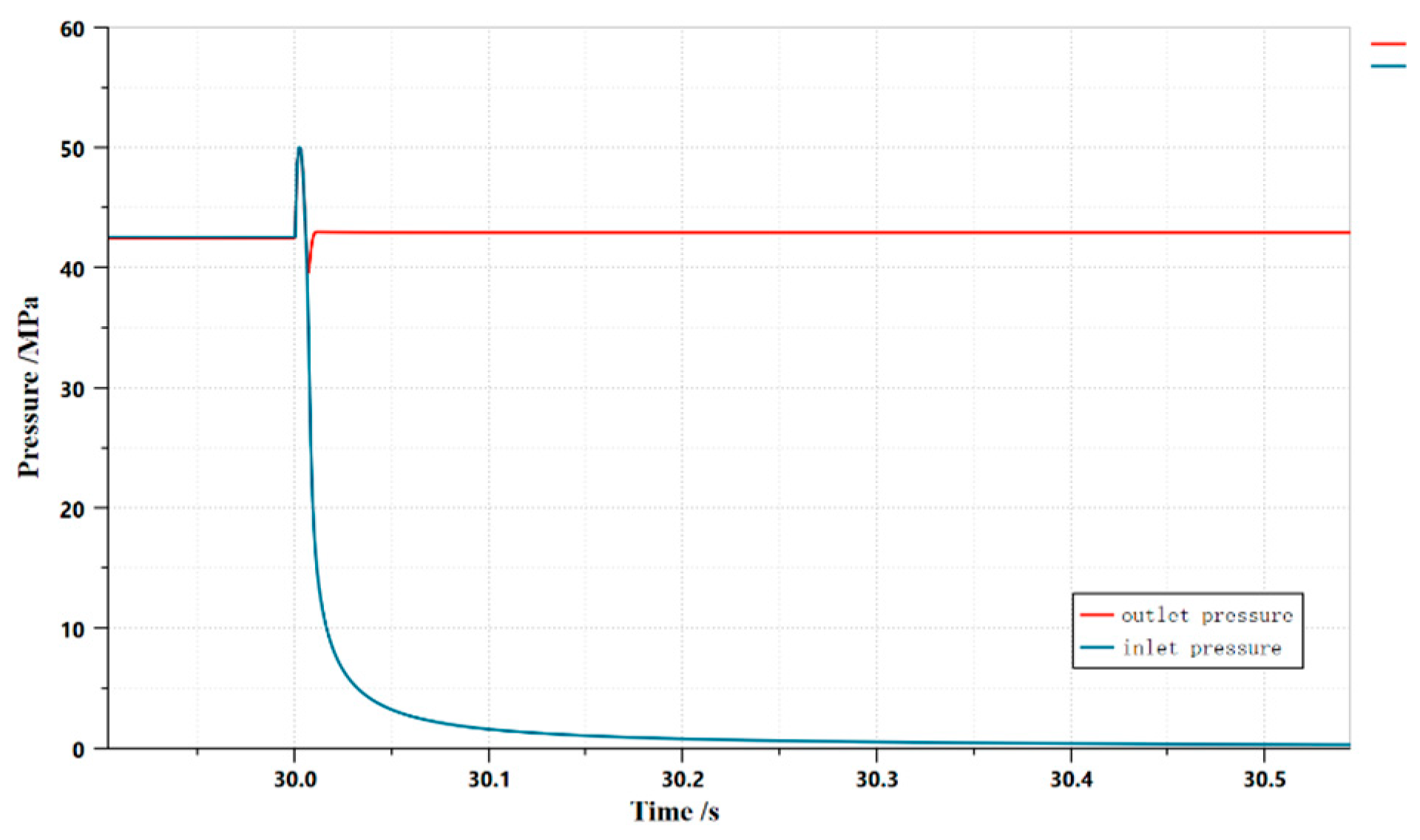
Figure 12.
Outlet pressure of HLHMDCUV at different spring preloads of digitally controlled pilot valves.
Figure 12.
Outlet pressure of HLHMDCUV at different spring preloads of digitally controlled pilot valves.
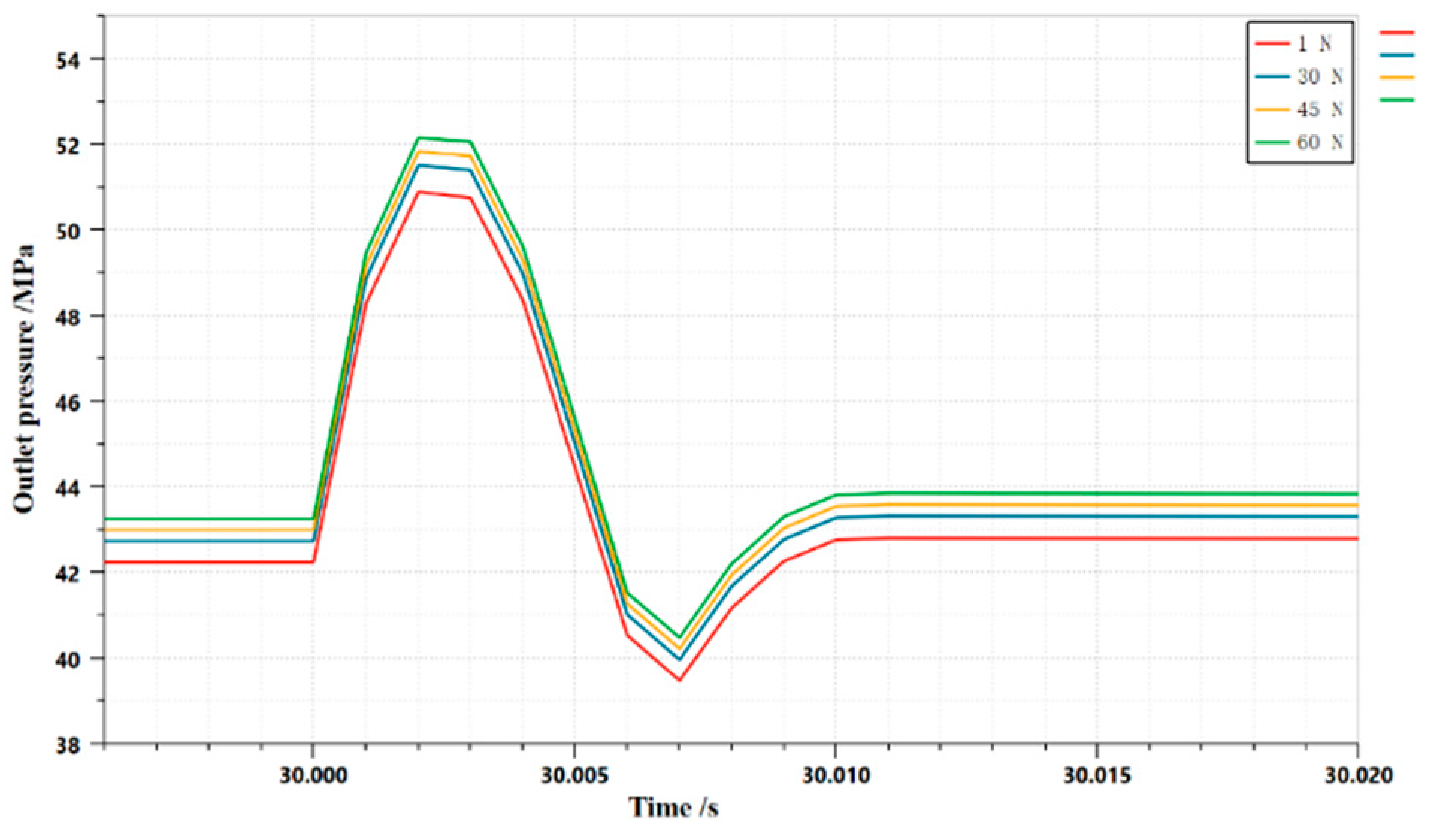
Figure 13.
Flow rate of a mechanically unloaded pilot valve with different spring preloads of the digitally controlled pilot valve.
Figure 13.
Flow rate of a mechanically unloaded pilot valve with different spring preloads of the digitally controlled pilot valve.
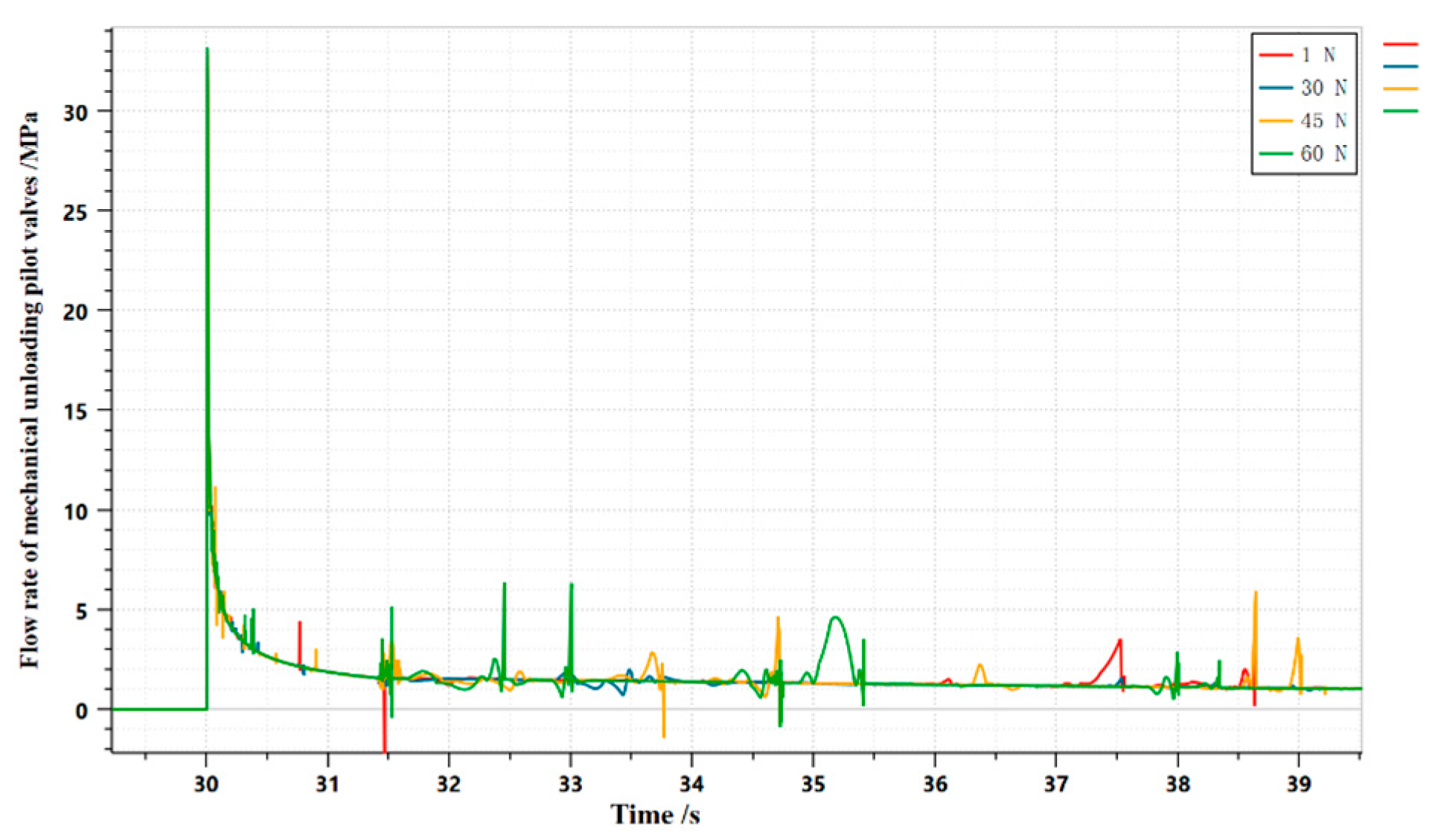
Figure 14.
Outlet pressure of HLHMDCUV at different spring preloads of one-way main valve.
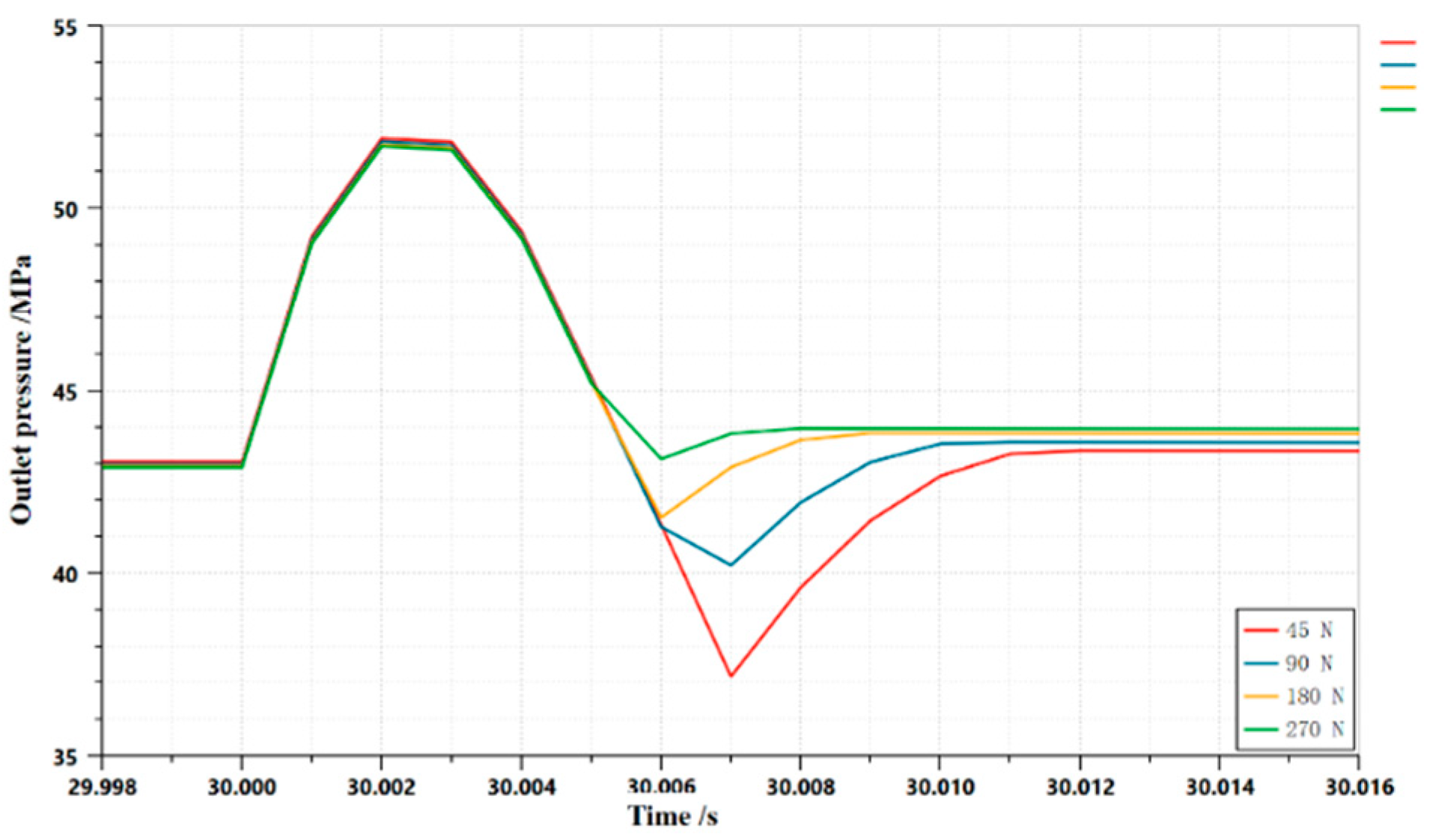
Figure 15.
Outlet pressure of HLHMDCUV at different spring preloads of unloaded main valve.
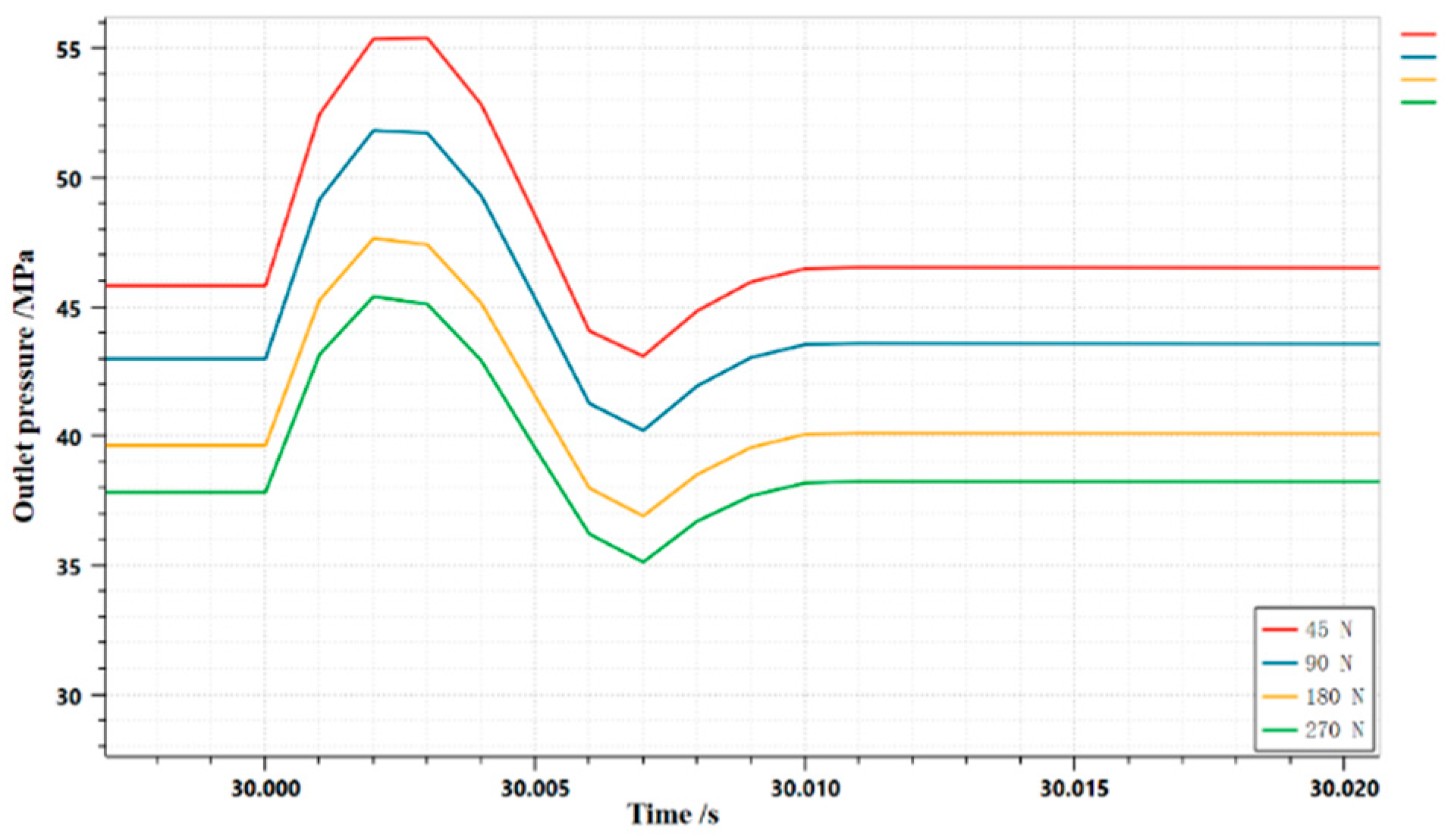
Figure 16.
Outlet pressure of HLHMDCUV with different diameter of damping holes in front of pilot valve cavity.
Figure 16.
Outlet pressure of HLHMDCUV with different diameter of damping holes in front of pilot valve cavity.
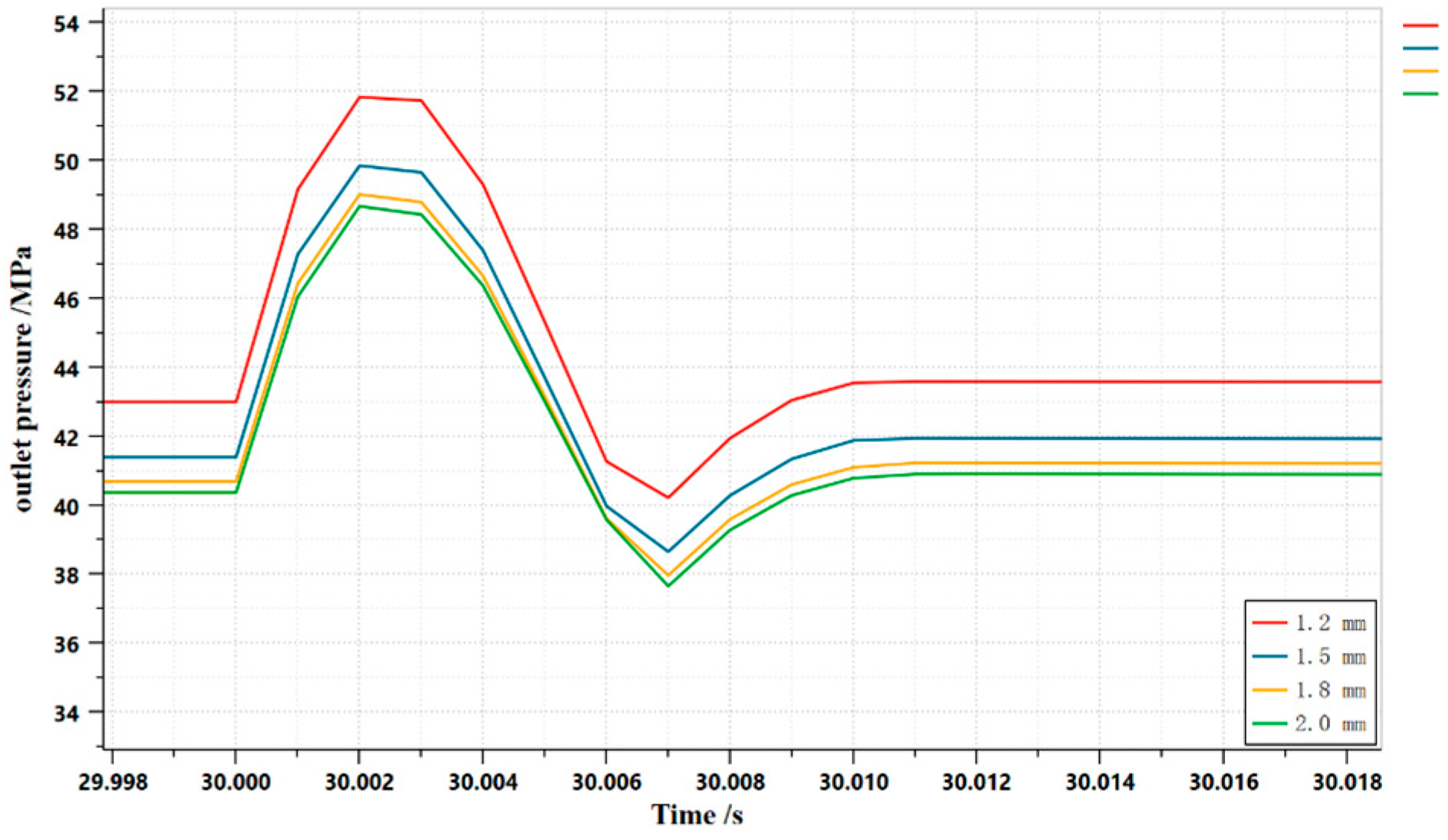
Figure 17.
Outlet pressure of HLHMDCUV with different lengths of damping holes in the front chamber of the pilot valve.
Figure 17.
Outlet pressure of HLHMDCUV with different lengths of damping holes in the front chamber of the pilot valve.
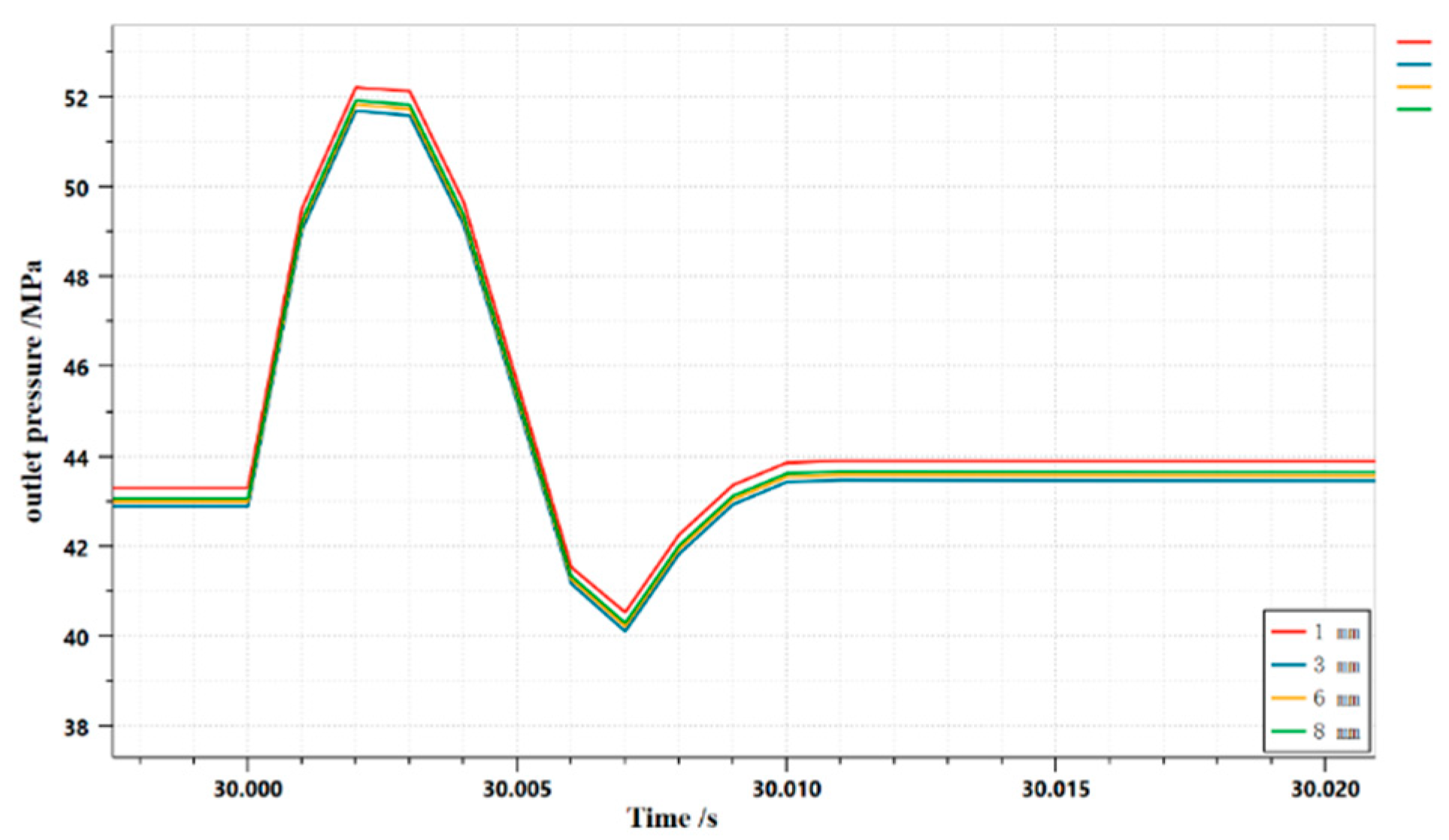
Figure 18.
Outlet pressure of HLHMDCUV with different diameter of damping holes in the upper chamber of the unloading main valve.
Figure 18.
Outlet pressure of HLHMDCUV with different diameter of damping holes in the upper chamber of the unloading main valve.
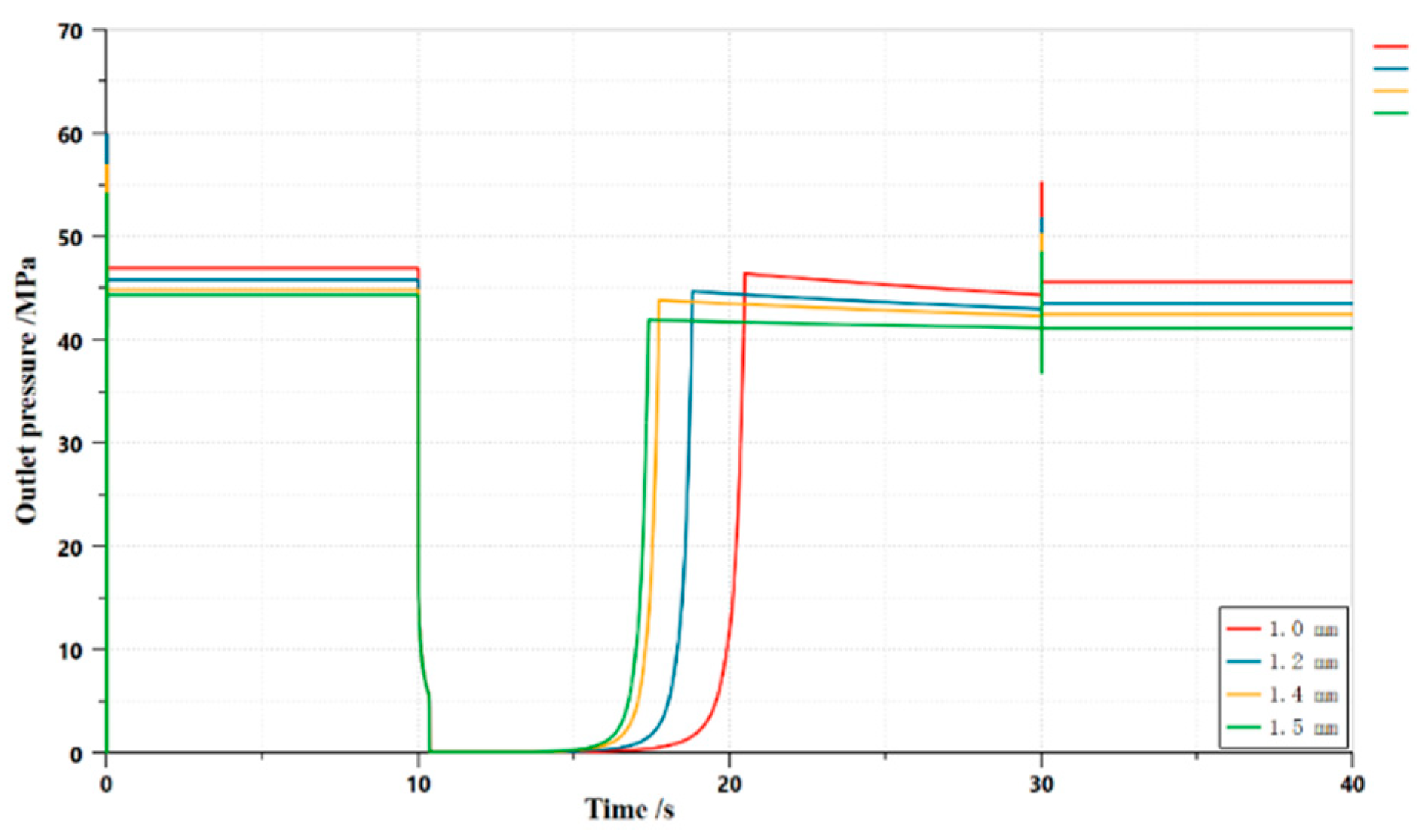
Figure 19.
Local enlargement of outlet pressure of HLHMDCUV with different diameter of damping holes in the upper chamber of the unloading main valve.
Figure 19.
Local enlargement of outlet pressure of HLHMDCUV with different diameter of damping holes in the upper chamber of the unloading main valve.
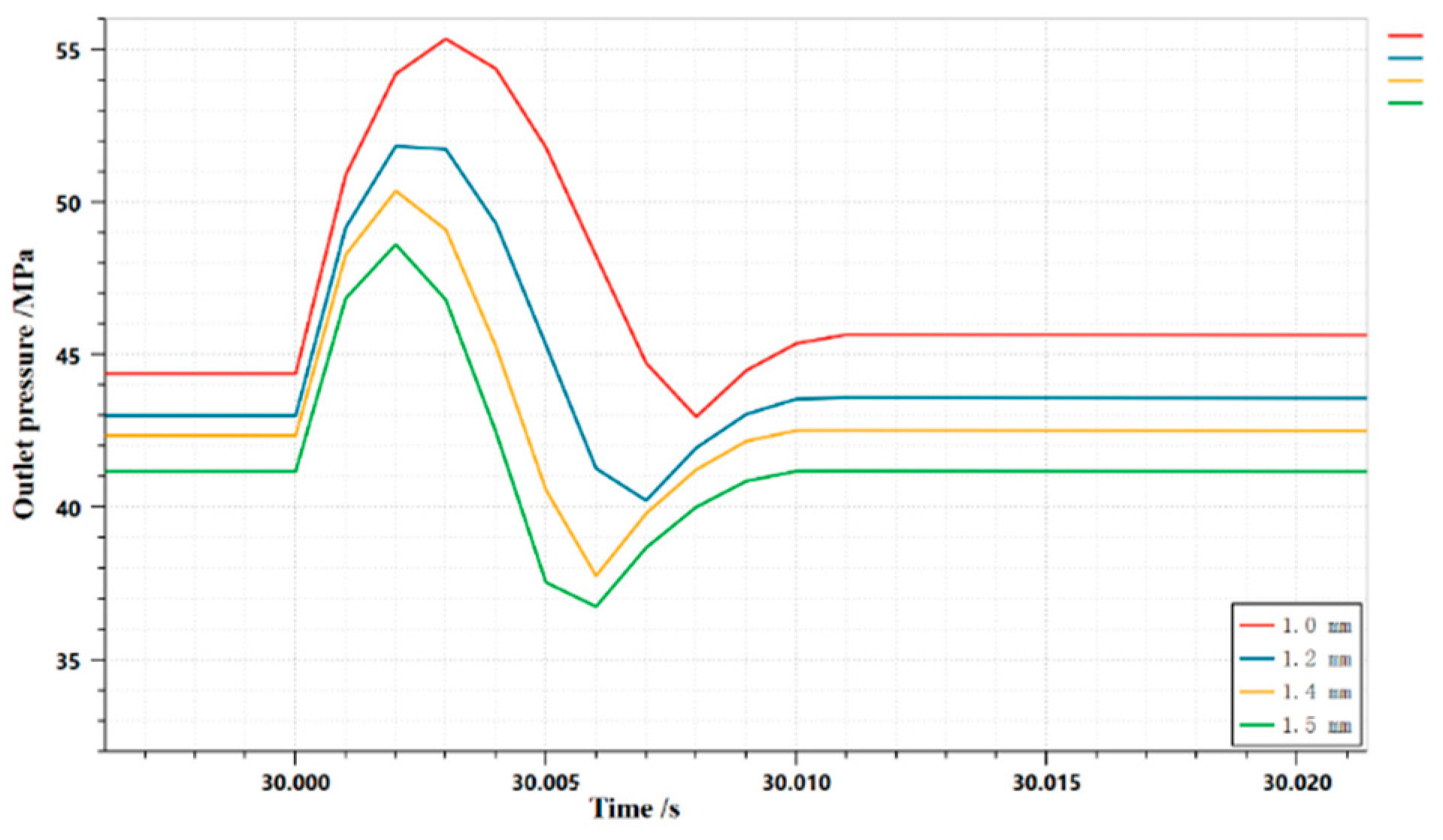
Figure 20.
Outlet pressure of HLHMDCUV with different lengths of damping holes in the upper chamber of the unloading main valve
Figure 20.
Outlet pressure of HLHMDCUV with different lengths of damping holes in the upper chamber of the unloading main valve
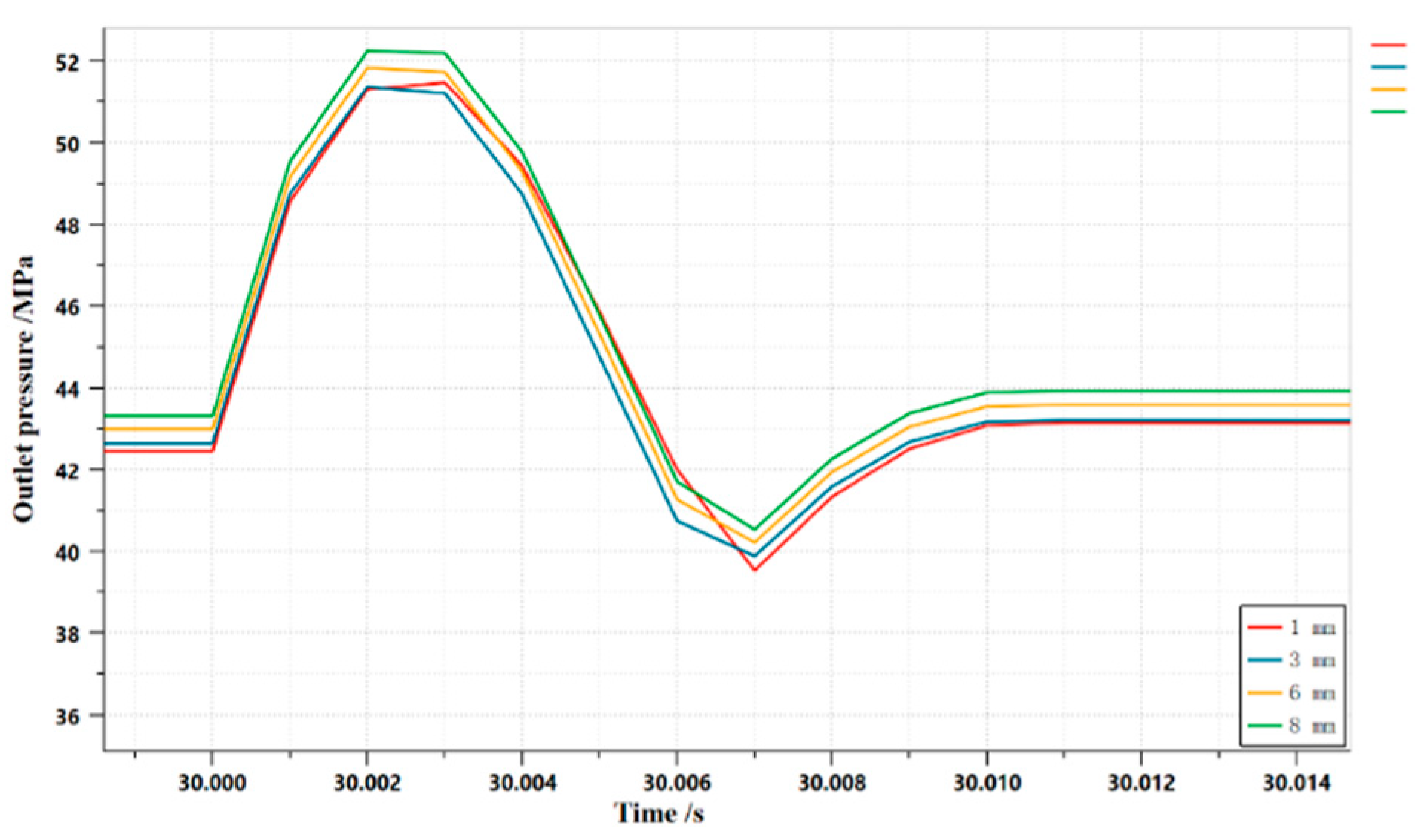
Figure 21.
Optimized structure vs. initial structure.
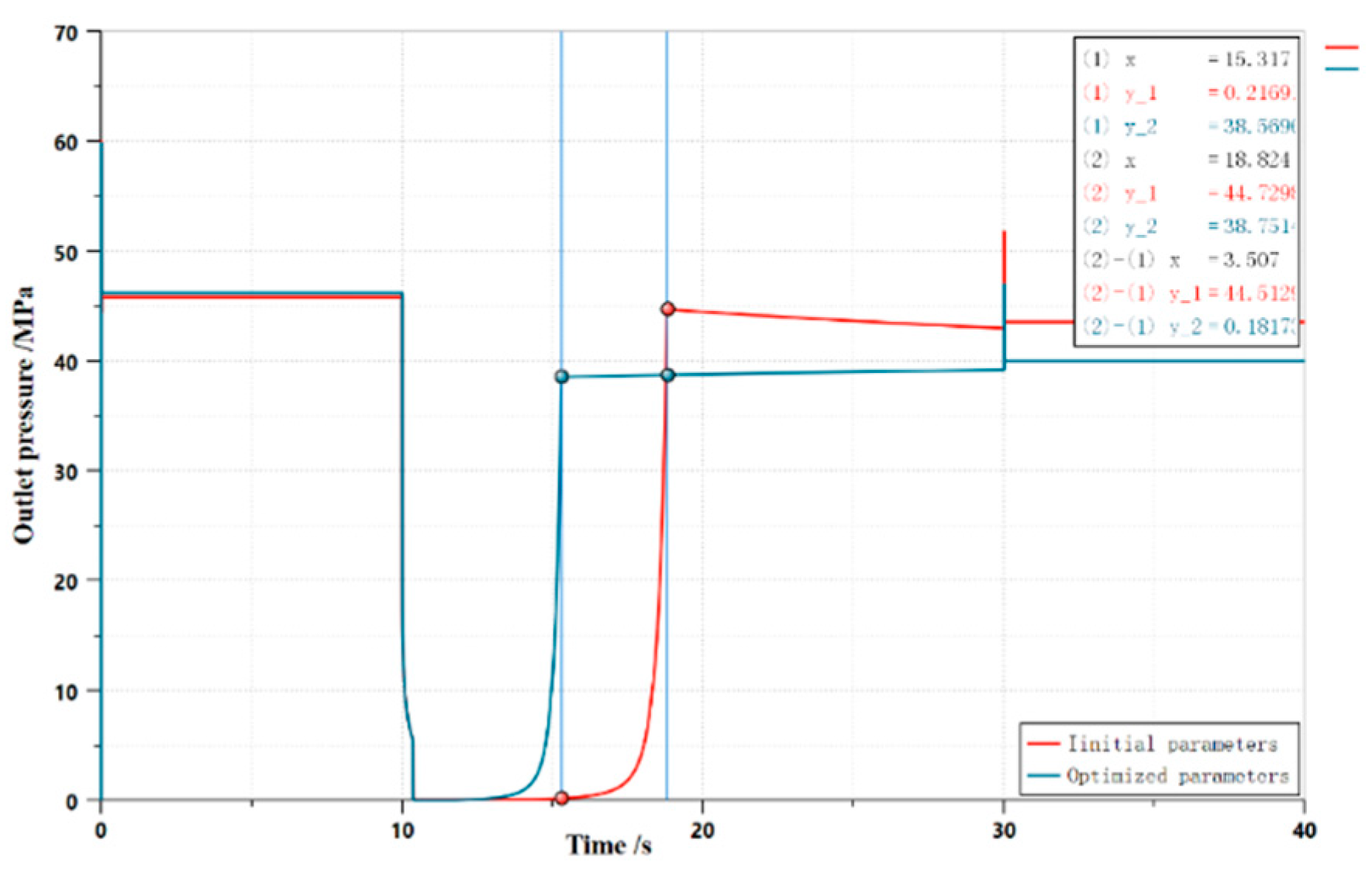
Figure 22.
Local enlargement of the optimized structure compared to the initial structure.
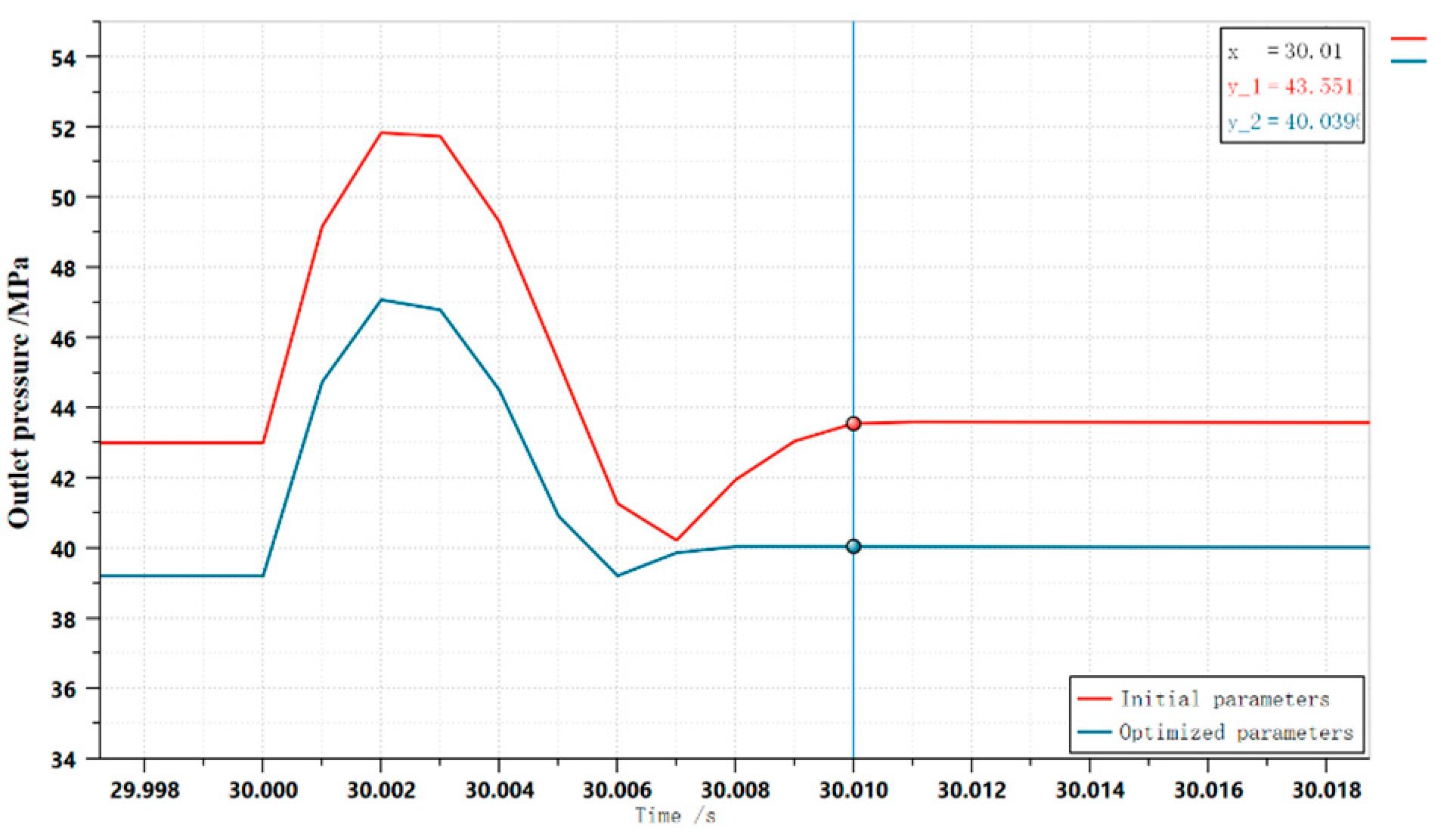
Figure 23.
Emulsion pressure cloud near the unloaded main spool at different opening degrees.
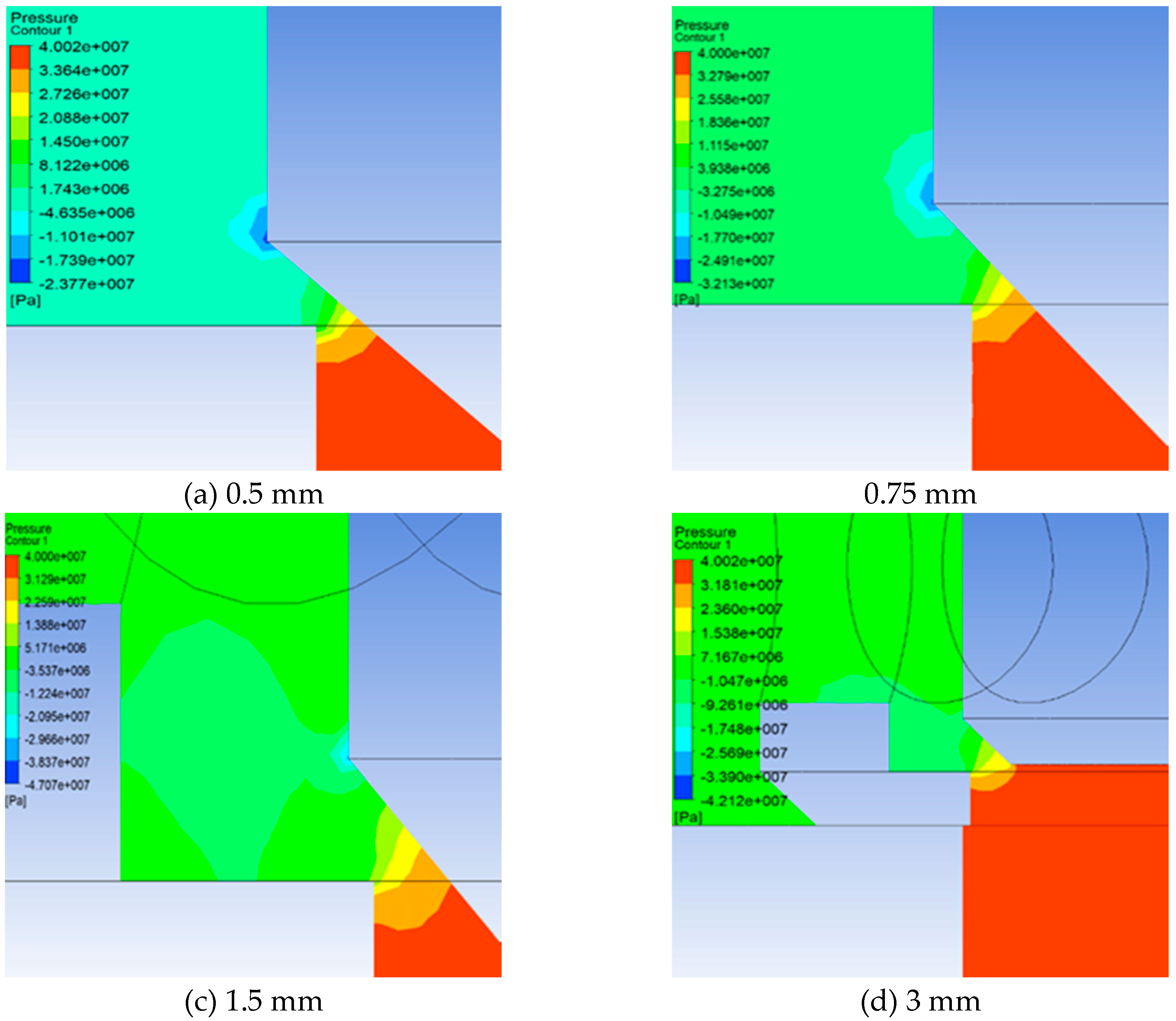
Figure 24.
Emulsion velocity cloud near the unloaded main spool at different opening degrees.
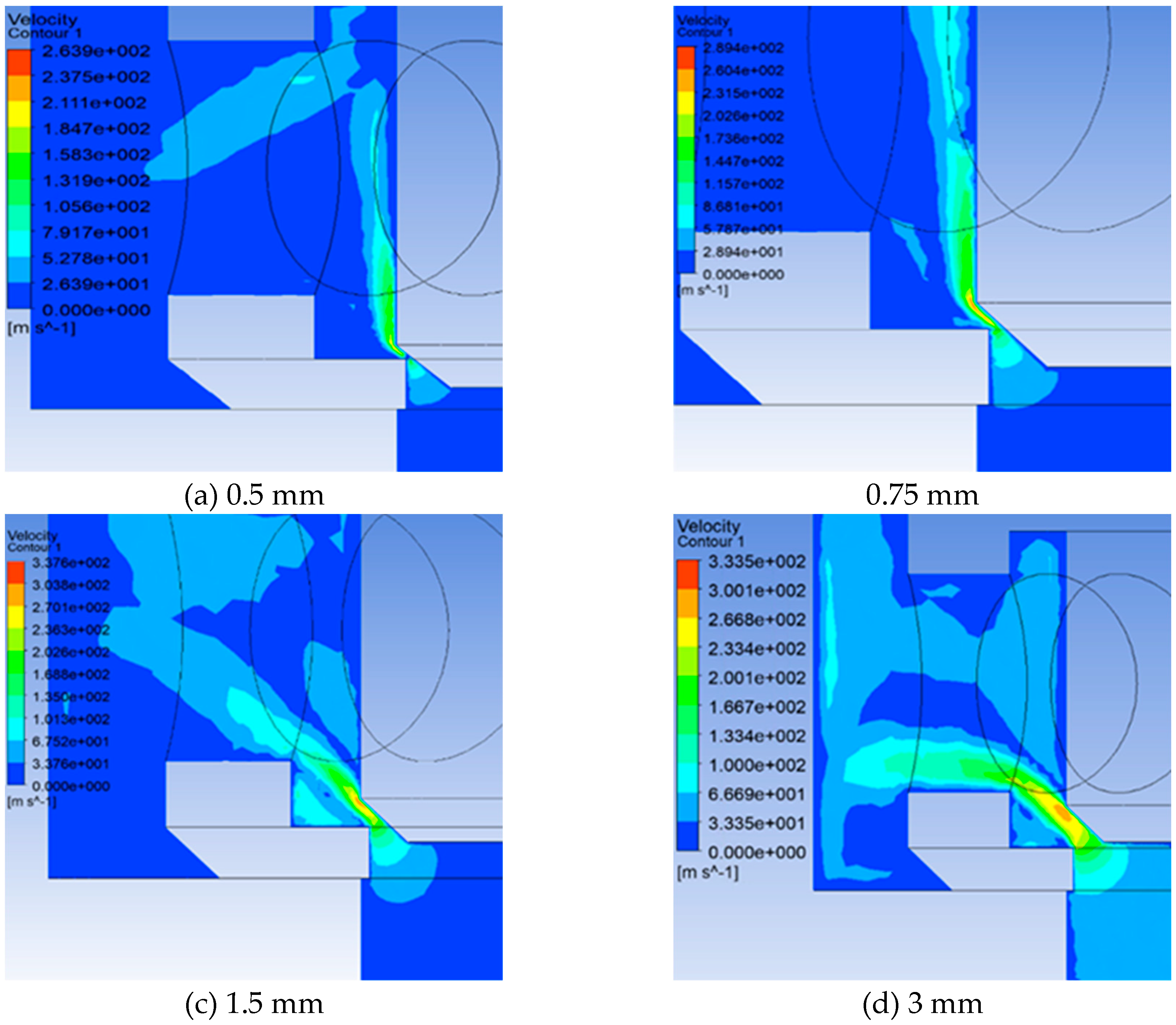
Figure 25.
Velocity vector distribution in the vicinity of the unloaded main spool for different opening degrees.
Figure 25.
Velocity vector distribution in the vicinity of the unloaded main spool for different opening degrees.
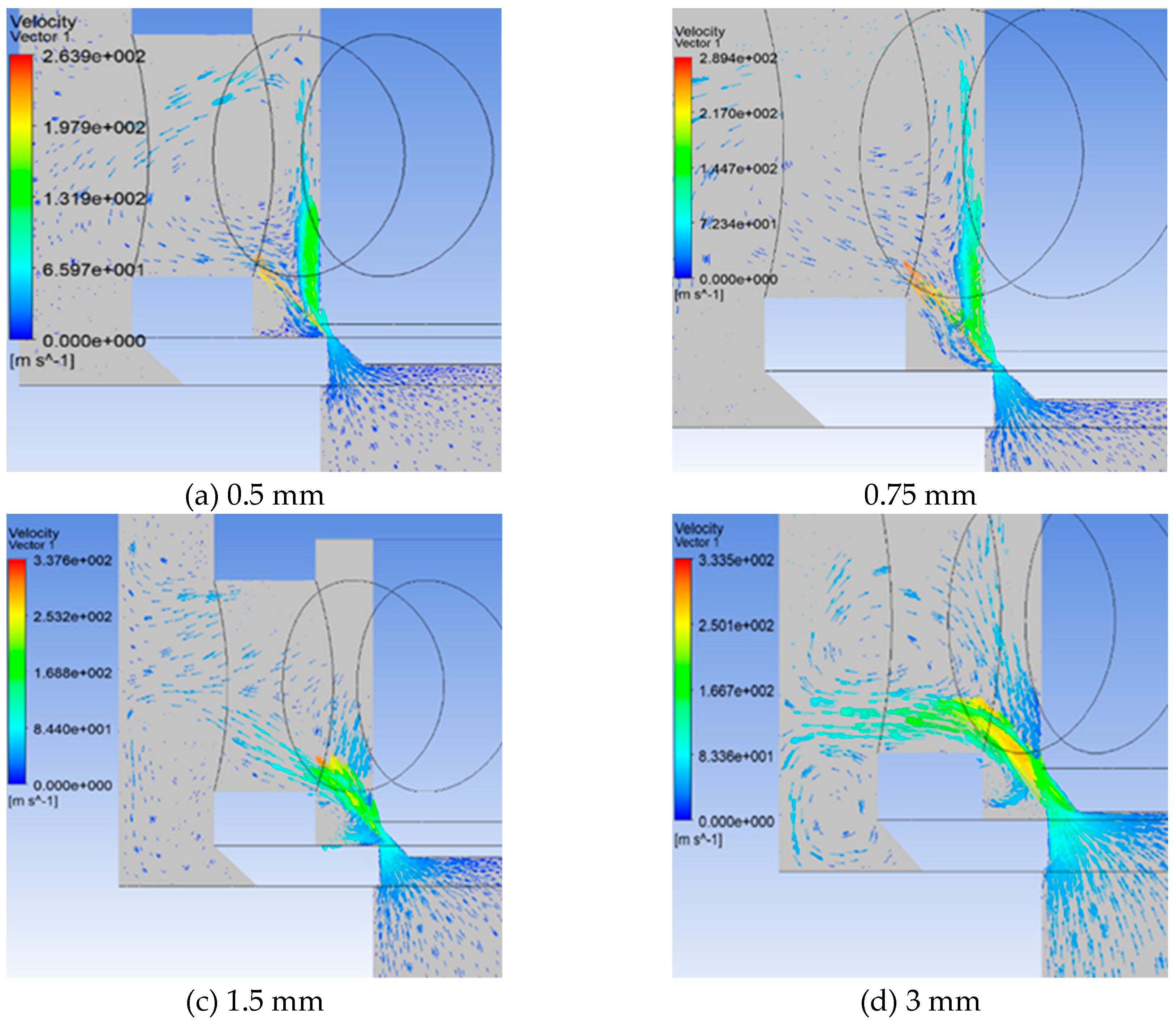
Figure 26.
Emulsion pressure cloud in the vicinity of the unloaded main spool.
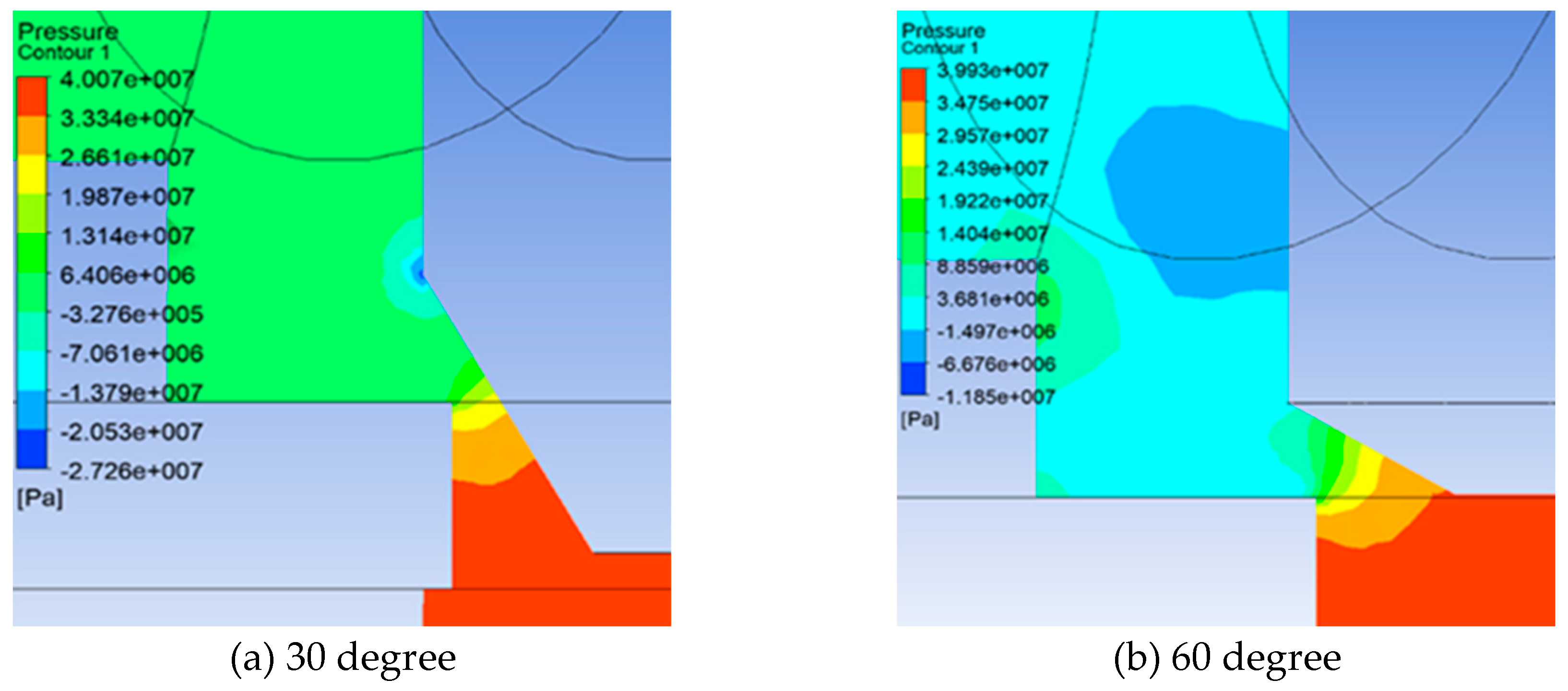
Figure 27.
Emulsion velocity cloud near the unloaded main spool.
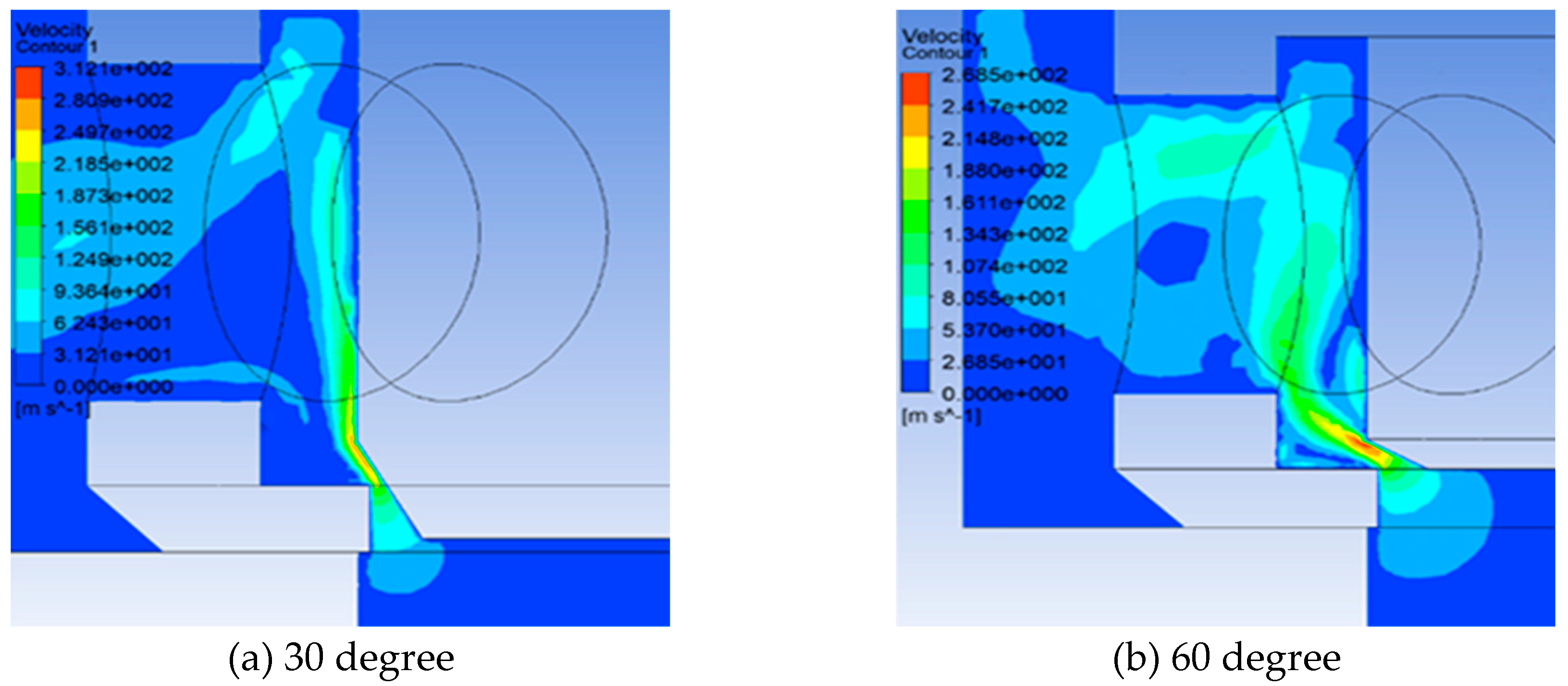
Figure 28.
Velocity vector distribution in the vicinity of the unloaded main spool.
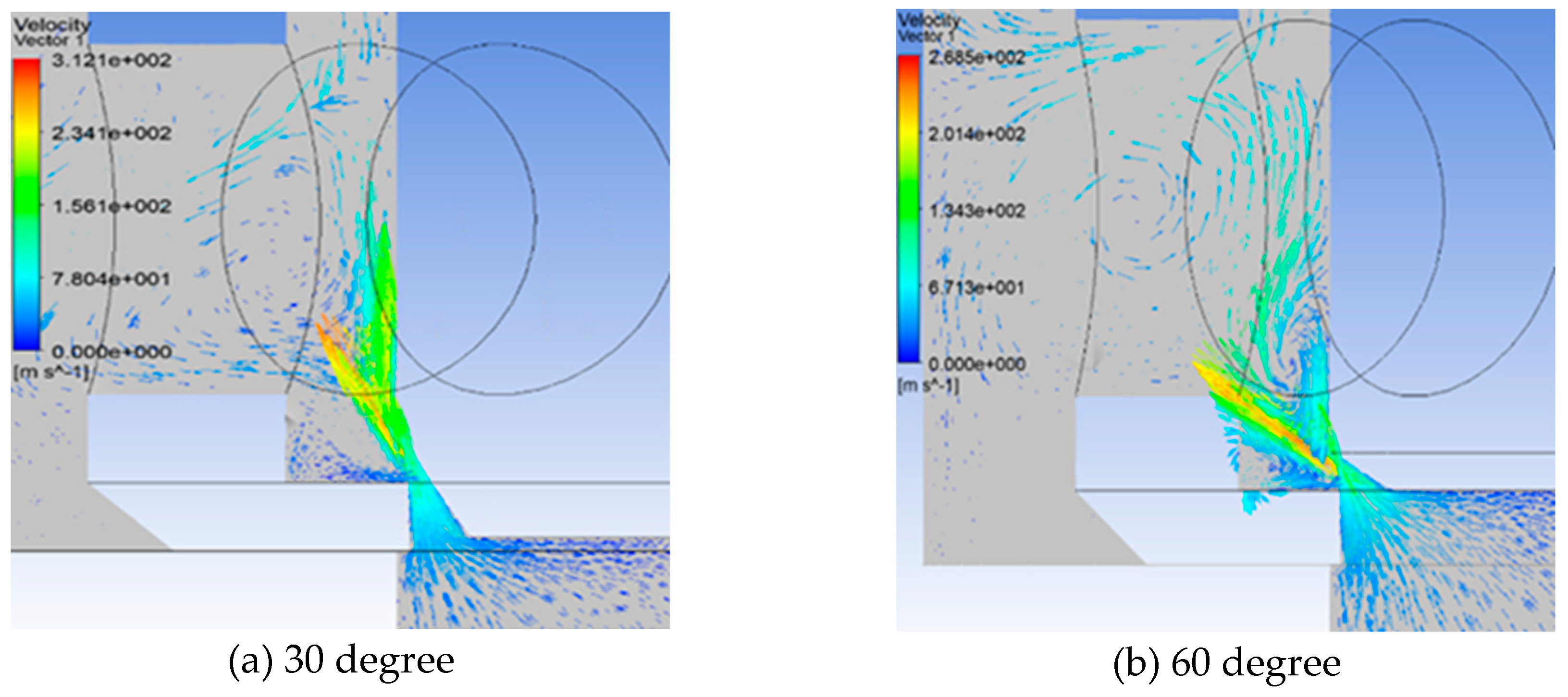
Figure 29.
Photograph of the whole machine of HLHMDCUV
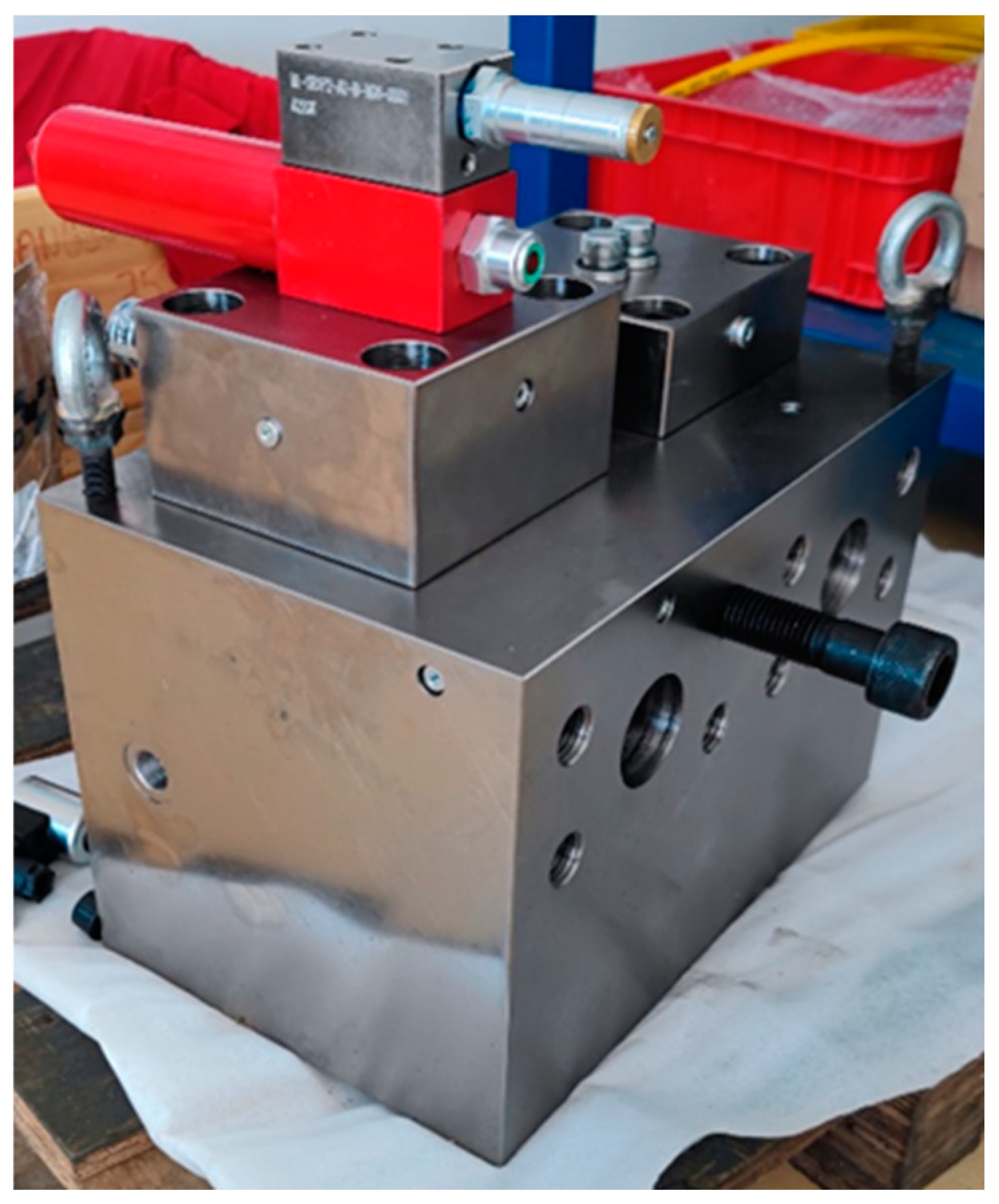
Figure 33.
Pump station outlet pressure when the pump station is supplying fluid to the hydraulic support.
Figure 33.
Pump station outlet pressure when the pump station is supplying fluid to the hydraulic support.
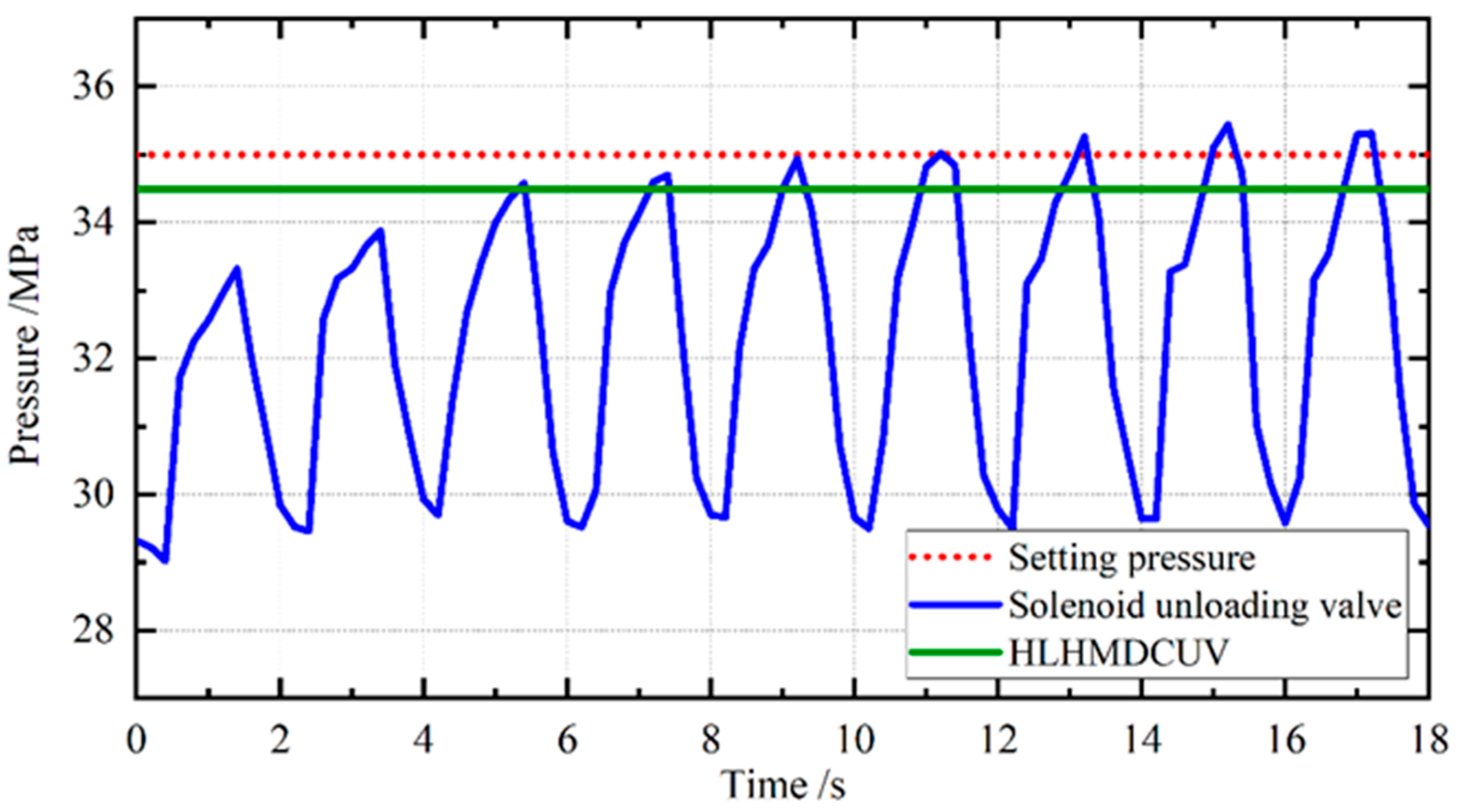

Table 1.
Initial structural parameters of HLHMDCUV.
| Structral parameter | Value |
|---|---|
|
Diameter of poppet of one-way main spool valve Diameter of hole of one-way main spool valve Spring preload of one-way main spool valve Diameter of poppet of unloading main spool Diameter of hole of unloading main spool Spring preload of unloaded main spool Diameter of hole of digitally controlled pilot valve Spring preload for digitally controlled pilot valves Diameter of poppet of mechanical unloading pilot valve Diameter of rod of mechanical unloading pilot valve Spring preload for mechanical unloading pilot valves Length of the damping hole in front of the pilot valve cavity Diameter of the damping hole in front of the pilot valve cavity Length of the damping hole in the upper chamber of the unloading main valve Diameter of the damping hole in the upper chamber of the unloading main valve |
56 mm 50 mm 90 N 56 mm 50 mm 90 N 3 mm 45 N 5 mm 4 mm 360π N 6 mm 1.2 mm 6 mm 1.2 mm |
Table 2.
Optimized HLHMDCUV parameters.
| Structral parameter | Value |
|---|---|
|
Diameter of poppet of one-way main spool valve Diameter of hole of one-way main spool valve Spring preload of one-way main spool valve Diameter of poppet of unloading main spool Diameter of hole of unloading main spool Spring preload of unloaded main spool Diameter of hole of digitally controlled pilot valve Spring preload for digitally controlled pilot valves Diameter of poppet of mechanical unloading pilot valve Diameter of rod of mechanical unloading pilot valve Spring preload for mechanical unloading pilot valves Length of the damping hole in front of the pilot valve cavity Diameter of the damping hole in front of the pilot valve cavity Length of the damping hole in the upper chamber of the unloading main valve Diameter of the damping hole in the upper chamber of the unloading main valve |
56 mm 50 mm 270 N 56 mm 50 mm 180 N 3 mm 24 N 5 mm 4 mm 360π N 6 mm 1.2 mm 3 mm 1.2 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



