
Submitted:
08 June 2023
Posted:
09 June 2023
You are already at the latest version
Abstract
We have revised the problem of the motion of a heavy symmetric top. When formulating equations of motion of the Lagrange top with the diagonal inertia tensor, the potential energy has more complicated form as compared with that assumed in the literature on dynamics of a rigid body. Using the Liouville's theorem, we solve the improved equations in quadratures and present the explicit expressions for the resulting elliptic integrals.
Keywords:
Integrability
; Lagrange top
; Hamiltonian systems
; Liouville's theorem
I. Introduction
This paper is the fifth in the series [1,2,3,4], devoted to a systematic exposition of the dynamics of a rigid body, considered as a system with kinematic constraints. In the previous works has been considered the dynamics of a free asymmetric body. Here we revise the problem of the motion of inclined heavy symmetric top with one fixed point.
Free asymmetric body. The evolution of a free rigid body in the center-of-mass system can be described by Euler-Poisson equations [1]
Here the functions are components of angular velocity in the body, and is orthogonal -matrix. Given the solution , the evolution of the body’s point is restored according to the rule: , where is the initial position of the point. Due to this, the problem (1) should be solved with the universal initial conditions: , . The solutions with other initial conditions are not related to the motions of a rigid body1. Both columns and rows of the matrix have a geometric interpretation. The columns form an orthonormal basis rigidly connected to the body. The initial conditions imply that at these columns coincide with the basis vectors of the Laboratory system. The rows, , represent the laboratory basis vectors in the body-fixed basis. For example, the functions are components of in the basis .
By I in Eq. (1) was denoted the inertia tensor. For the body considered as a system of n particles with coordinates and masses , , it is a numeric -matrix defined as follows:
Generally, is nondegenerate symmetric matrix transforming as the second-rank tensor under rotations of the Laboratory system. This can be used to simplify Eqs. (1), assuming that at the instant the Laboratory axes have been chosen in the direction of eigenvectors of the matrix . Then the inertia tensor in Eqs. (1) has diagonal form: . The initial conditions imply that the axes of body-fixed basis at also coincide with the inertia axes. Since these two systems of axes are rigidly connected with the body, they will coincide in all future moments of time.
Let’s consider an asymmetric rigid body, that is (), and suppose that we describe it using the equations (1), in which the inertia tensor is chosen to be diagonal. This implies that the position of the Laboratory system is completely fixed, as described above. As will be seen further, it is precisely this circumstance that is not taken into account in textbooks when formulating the equations of heavy symmetric top and solving them.
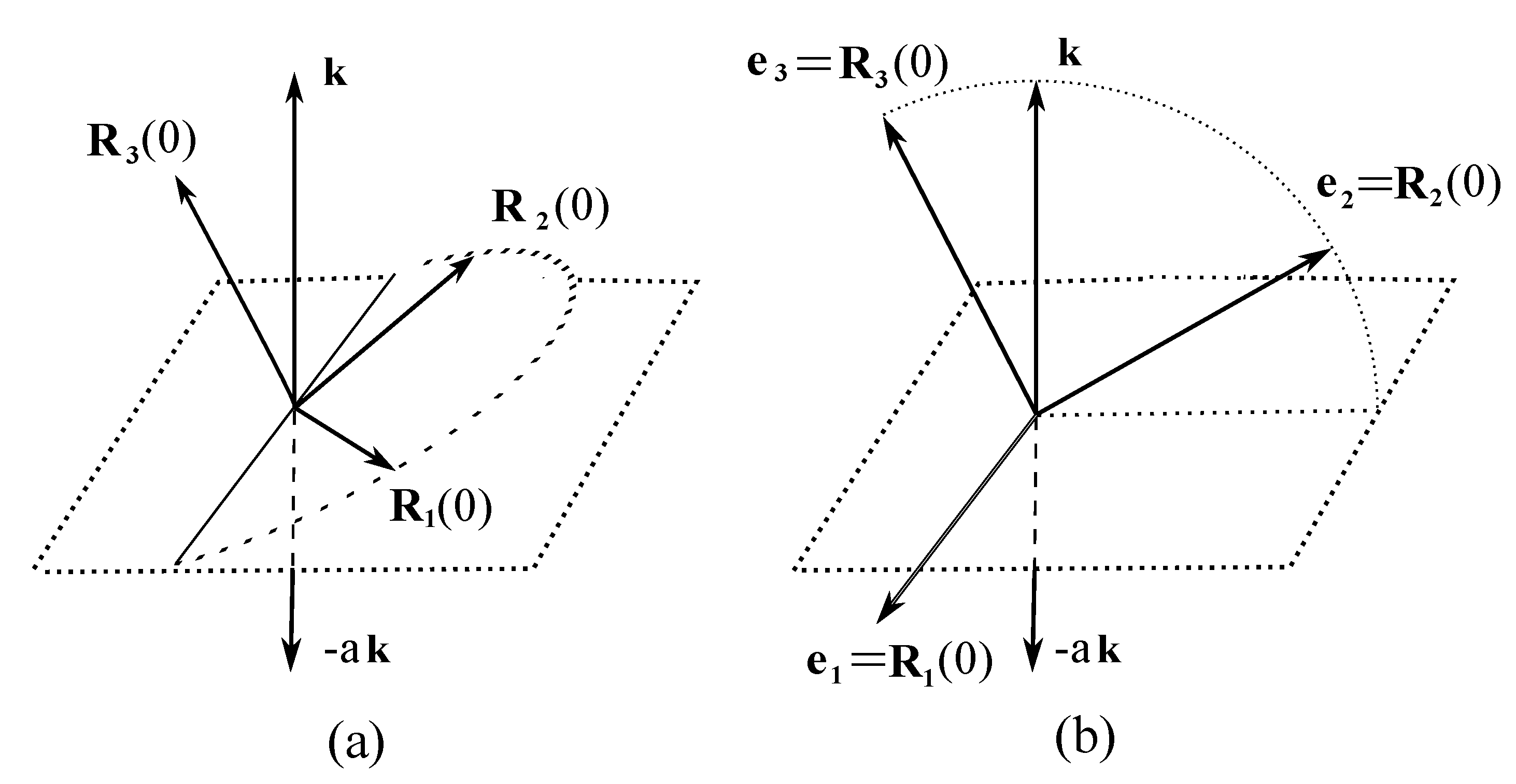
Heavy symmetric body with a fixed point. Let’s consider a rigid body with one fixed point. It is known [5,6,7,8,9] that by placing the origin of the Laboratory system at this point, we arrive at the same equations (1) and (2). Further, let the body is subject to the force of gravity, with the acceleration of gravity equal to and directed opposite to the constant unit vector , see Figure 1a. Then the potential energy of the body’s particle is . Summing up the potential energies of the body’s points, we get the total energy . Here , L is the distance from the center of mass to the fixed point, is the total mass of the body and is unit vector in the direction of center of mass at . The potential energy give rise to the torque of gravity in the equations of motion, which read now as follows:
Let the initial position of the inertia axes of the body be as shown in Figure 1a. Assuming that the Laboratory axes have been chosen in the direction of the inertia axes, the matrix I in Eq. (3) acquires the diagonal form. Let us denote components of the vector in this basis as .
If our body is a symmetric, that is , our equations can be simplified as follows. Without loss of generality, we can assume that the vector has the following form: . Indeed, the eigenvectors and eigenvalues of the inertia tensor I obey the relations . With we have and , then any linear combination also represents an eigenvector with eigenvalue . This means that we are free to choose any two orthogonal axes on the plane as the inertia axes. Hence, in the case we can rotate the Laboratory axes in the plane without breaking the diagonal form of the inertia tensor. Using this freedom, we can assume that for our problem, see Figure 1(b).
Symmetric (Lagrange) top. Let’s consider the symmetric body, , and assume that its center of mass lies on the axis of inertia . This body is called the symmetric (or Lagrange) top [9]. This allows further simplify the equations of motion, since by construction .
With these and , the potential energy acquires the form . Using these and in Eqs. (3), we get the final form of equations of motion of a heavy symmetric top for the variables and . To compare them with those given in textbooks, we rewrite our equations in terms of Euler angles2
They follow as the conditions of extremum of the following Lagrangian:
In the textbooks, equations of motion of the heavy symmetric top follow from a different Lagrangian, the latter does not contain the term proportional to [9]
This term is discarded on the base of the following reasoning: to simplify the analysis, choose the Laboratory axis in the direction of the vector ... . However, this reasoning does not take into account the presence in the equations of moments of inertia, which have the tensor law of transformation under rotations. Indeed, going back to Eqs. (3), select in Figure 1(b) in the direction of , and calculate the components of the inertia tensor. Since the axis of inertia does not coincide with , we obtain a symmetric matrix instead of a diagonal one, which should now be used in the equations of motion. That is, the attempt to simplify the potential energy leads to a Lagrangian with a complicated expression for the kinetic energy.
Thus, it seems to be necessary to revise the problem of the motion of a heavy symmetric top and correct this drawback.
II. Integrability in quadratures according to Liouville.
Effective Lagrangian with two degrees of freedom. Eq. (4) states that is the integral of motion of the theory (7). Besides, the variable does not enter into the remaining equations () and (). So we can look for the effective Lagrangian that implies the equations () and () for the variables and . This is as follows:
where is considered as a constant. To apply the Liouville’s theorem, we need to rewrite the effective theory in the Hamiltonian formalism. Introducing the conjugate momenta and for the configuration-space variables and , we get
The Hamiltonian of the system is constructed according the standard rule: . Its explicit form is as follows:
where it was denoted
The Hamiltonian equations can be obtained now according the standard rule: , where z is any one of the phase-space variables, and the nonvanishing Poisson brackets are , .
The effective theory admits two integrals of motion. They are the energy
and the projection of angular momentum on the direction of vector
The preservation in time of can be verified by direct calculation3. The remarcable property of the integrals of motion is that they have vanishing Poisson bracket, , as it can be confirmed by direct calculation. Accoding to the Liouville’s theorem [9,10], this implies that a general solution to the equations of motion can be found in quadratures (that is calculating integrals of some known functions and doing the algebraic operations). Our aim now will be to present the explicit form of the integrals in question.
According to the algorithm used in the proof of Liouville’s theorem [10], we need to resolve Eqs. (13), (14) with respect to and . Using the identities
we get the solution
where . Next we need to integrate these functions along any curve connecting the origin of configuration space with a point . Taking the curve to be a pair of intervals, , we obtain the following function
Then the general solution to the equations of motion of the theory (9) is obtained resolving Eqs. (16) together with the equations , with respect to the phase-space variables . Using (18), the last two equations read as follows:
Calculating the partial derivatives indicated in these integrals, we get
These are elliptic integrals over the indicated integration variables.
III. Conclusion.
When formulating and solving the equations of motion of a rigid body with the inertia tensor chosen in the diagonal form, one should keep in mind the tensor law of transformation of the moments of inertia under rotations. We observed that for the symmetric top this leads to the potential energy that depends on the Euler angles and . The potential energy (7) is different from that assumed in textbooks (8). So we revised the problem of the motion of a heavy symmetric top and corrected this drawback. We confirmed that the improved equations of motion () and () are integrable according to Liouville, and reduced the problem to the elliptic integrals (21)-(24).
In the absence of analytic solution, we could look for one-dimensional effective Lagrangian, say , and try to analyze qualitatively the corresponding effective potential [6,9]. To find it, it is necessary to solve with respect to and the equations, which represent the integrals of motion E and . However, this implies the search for the roots of a polinomial of degree 6.
Acknowledgments
The work has been supported by the Brazilian foundation CNPq (Conselho Nacional de Desenvolvimento Científico e Tecnológico - Brasil).
| 1 | Failure to take this circumstance into account leads to a lot of confusion, see [11]. |
| 2 | See Appendix 1 in [1] for the details. |
| 3 | In terms of the variables and the integral of motion reads as follows: , where is the angular momentum of the top. Its preservation in time follows also from Eqs. (3). |
References
- A. A. Deriglazov, Lagrangian and Hamiltonian formulations of asymmetric rigid body, considered as a constrained system, arXiv:2301.10741.
- A. A. Deriglazov, Geodesic motion on the symplectic leaf of SO(3) with distorted e(3) algebra and Liouville integrability of a free rigid body, Eur. Phys. J. C (2023) 83:265; arXiv:2302.04828.
- A. A. Deriglazov, Poincaré-Chetaev equations in the Dirac’s formalism of constrained systems, arXiv:2302.12423.
- A. A. Deriglazov, General solution to the Euler-Poisson equations of a free Lagrange top directly for the rotation matrix, arXiv:2303.02431.
- E. T. Whittaker, A treatise on the analytical dynamics of particles and rigid bodies, (Cambridge: at the University press, 1917).
- W. D. MacMillan, Dynamics of rigid bodies, (Dover Publications Inc., New-York, 1936).
- E. Leimanis, The general problem of the motion of coupled rigid bodies about a fixed point, (Springer-Verlag, 1965).
- H. Goldstein, C. Poole and J. Safko, Classical mechanics, Third edition, (Addison Wesley, 2000).
- V. I. Arnold, Mathematical methods of classical mechanics, 2nd edn. (Springer, New York, NY, 1989).
- A. V. Bolsinov and A. T. Fomenko, Integrable Hamiltonian systems, (Charman and Hall/CRC, 2004).
- A. A. Deriglazov, Comment on the Letter "Geometric Origin of the Tennis Racket Effect” by P. Mardesic, et al, Phys. Rev. Lett. 125, 064301 (2020), arXiv:2302.04190.
Figure 1.
(a) - Initial position of a heavy top with orthogonal inertia axes . (b) - Due to the freedom in the choice of and , the vector can be taken in the form
Figure 1.
(a) - Initial position of a heavy top with orthogonal inertia axes . (b) - Due to the freedom in the choice of and , the vector can be taken in the form
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



