
Submitted:
20 April 2023
Posted:
21 April 2023
You are already at the latest version
Abstract
For the emerging autonomous swarm technology, from the perspective of systems science and systems engineering, there must be some novel elements and methods to aggregate multiple systems into a group, which distinguish with the general components with specific functions, and we expect to provide the presentation of their existence in the swarm development processes. The inspiration of our methodology origins from the integration of swarm ontology, multi-paradigm modeling, multi-agent system, cyber-physical system, etc. Therefore, we choose the model-driven technology as a framework to acquire an approach of model representation across the multiple levels of abstraction and composition. The autonomous strategic mechanism is defined and formed in parallel with ConOps analysis and systems design, so as to effectively solve the cognitive problem of emergence caused by the nonlinear causation among individual and whole behaviors. This approach highlights to use the MBSE processes and their artifacts to embed the meso mechanism to integrate the operational and the functional, and which means to connect the macro and micro aspects in formalism and so to become a whole with its expected goals, and then to verify and validate within a L-V-C simulation environment.
Keywords:
swarm ontology
; autonomous system
; model-driven
; multi-paradigm modeling
; model-base systems engineering
1. Introduction
The current trends of the development of unmanned systems are increasing to add the characteristics of autonomy, adaptability and intelligence, and such multiple and even completely heterogeneous systems can be aggregated into a swarm to address various types of missions which is more complex. There are usually a large number of elements in a swarm which existing in a decentralized manner and interacting closely or even in real time, and resulting in the emergence of swarm across multiple levels of causation. When we think of swarm as a complex system or system of systems (SoS), it is difficult to comprehend and analyze, so that traditional engineers cannot use closed-form analysis or prediction techniques to fulfill the development of concept of operations (ConOps) of swarm and the design of individual system units [1]. On the other hand, in the emerging field of autonomous swarm technology, the design elements and its overarching architecture to aggregate multiple unmanned systems into a group are always vague, even lacking or ignored [2].
But today, the application of digital technologies in swarm seems to be very significant as the evolution of digital engineering for mission, specification, design, integration, verification and validation in complex systems [3]. Compared with traditional systems with transparent use cases and exact functions, the development of the complex system such as a swarm will intensely depend on the utilization of modeling and simulation (M&S), so that which may be the sole appropriate approach throughout the development of a swarm. In experimental platforms, the different simulation results are organized to group them depending on the missions or behaviors carried out by the swarm. Some behaviors, such as aggregation and collective movement, are quite basic to constitute more complex and high-level swarm tasks [4]. Although swarm technology is based on unmanned systems and artificial intelligence, etc., its application is still in the infancy of implementation, and the enhanced capabilities of swarms can bring obvious advantages for the achievement of mission tasks, such as distributed delivery and deployment, remote communication and command, persistent surveillance and reconnaissance, multi-sensor data collection and transmission, multi-target search and target, etc. [5]
Therefore, we should rely on the general principles and methods of model-based system engineering (MBSE) to establish a new swarm-oriented technology application paradigm. To create and evolve a mission-effective swarm, traditional engineers must collaborate with system architects to consider the methodology of operation, design, and test when developing an autonomous unmanned swarm [3].
We will focus on a domain-specific application of swarm, and aim to able to meet the expected mission efficiency and the requirements of the autonomous unmanned system within a single context of the development framework. We explore the concept of operations (ConOps) of autonomous swarm and derive the design specification of the autonomous system (AS) both in a common architecture of viewpoints and views, as well as a coherent life-cycle process to capture and track them.
The rest of the paper is organized as follows: Section II provides some related concepts and work along our research roadmap, Section III describes the architecture framework of M&S based on swarm ontology, Section IV discusses some different methods of M&S and their applications in our approach, Section V concludes the paper.
2. Related Work
The elements of our methodology is mainly from heuristics of the ontology in knowledge representation and artificial intelligence, Cyber Physical Systems (CPS) with hybrid networked computational and engineered physical elements, behavior-based system modeled by the discrete events specification (DEVS), Agent-based model for an adaptive system, Multi-Paradigm Modeling (MPM) as the foundation for CPS engineering, the digital twins applied in a Live-Virtual-Constructive (L-V-C) platform, and the architectural framework model of the life-cycle of a complex swarm system from conceptualization to contextualization on model-based systems engineering (MBSE) and so on. The methodology provides a common approach for designing and operating swarm to meet the performance and requirements for any intended missions.
2.1. Swarm Ontology
An ontology is a system of concepts to represent an explicit specification of a conceptualization, which is borrowed from philosophy where is the systematic study of Existence (Being) in generals. Ontology is a top-level abstraction of complex system in the field of artificial intelligence. In the context of our research, an ontology is regarded as a knowledge representation approach reflecting concepts with their properties and relationships in domain-specific, and also constraints and rules governing those properties and relationships. For autonomous swarm, it could embody the intelligence and other characteristics expected by human into the technical characteristics of such as cognition, behavior, perception and execution in the form of formal models and structural frameworks. In the context of AI, we can define a set of concepts (such as object, relationship, interaction, function or other) in a domain knowledge to describe the ontology of the system, in which human understandable terms and axioms help to explain its meanings, and also well-formed constrains among these terms to support machine reasoning. Therefore, the ontology is a formal declarative modelling method of logic-based statements.
Because the autonomous unmanned system swarm has the characteristics that individuals follow simple behavior and logic rules and can stimulate collective behavior with the decentralized coordination mechanism, M&S might be the most potential approach to solve problems of such complex systems. However, from the perspective of M&S, the relationship between the emergence behavior embodied by the swarm as a whole and the simple behavior of the individual requires to be effectively represented in the swarm ontology, which is not only the highest level of abstract form, but also the most basic theoretical foundation of this study [1].
With the growing complexity of the collaboration among multiple autonomous systems and human-robot, IEEE-RAS (Robotics and Automation Society) Robotics and Automation Ontology working group formed a standard ontology and associated methodology for knowledge representation and reasoning in robotics and automation, together with the representation of concepts in an initial set of application domains. In order to cover the domain of robotics and automation, the working group develop a bottom-up and top-down approach with four sub-groups: Upper Ontology/Methodology (UpOM), Autonomous Robots (AuR), Service Robots (SeR) and Industrial Robots (InR). The focus of the AuR sub-group is the future unmanned systems working in teams with other unmanned vehicles to share situational awareness and coordinate activities, such as unmanned aerial vehicles (UAVs), unmanned ground vehicles (UGVs), and autonomous underwater vehicles (AUVs). For the level of individual system, the ontology provides the help to enable the decision-making, control strategies, sensing abilities, mapping, environment perception, motion planning, communication, and autonomous behaviors, etc. [6]
2.2. Model-Based Paradigm
Model-based paradigms have become a powerful driver for systems engineering (SE) and the launching of system thinking, in which processes and activities of the system life-cycle shape the context of systems engineering practice, and the applications of M&S constitute the core mechanism. The essence of transformation of MBSE is a continuous shift to a system development process supported by the continuity and traceability of models. When referring to models, we highly advocate the executable models for simulation in an experimental frame (EF). Therefore, advanced M&S technologies and methods have become the key enabler driving the operation of system engineering cycles. M&S is beneficial to help to connect the stages of MBSE [7].
Model Based System Engineering (MBSE) relies on the trend to adopt the unified formal model throughout the system's life-cycle process activities, and has been struggling to seek a appropriate means to connect the blueprint models that describe the system architecture in an iterative and incremental way, and then be used to validate with these stakeholders and verify by its specifications, even early in the prototyping development. In order to support the multi-disciplinary practice in SE across many decades, the communities in systems engineering have adapted a lot of modeling approaches and tools, which involving from mission and business analysis, requirements management, system structure and interfaces and even to system behavior, and so on. We need a formal modeling language to combines visual graphics for human communication and a meta-model with constructs and rules needed to build specific models within a domain of interest, and a specification to be exchanged spanning diverse modeling paradigms and tools. Unified Architecture Framework (UAF) for SoS, System Modeling Language (SysML) for System and its collections of visual diagrams, which derived from the Unified Modeling Language (UML), has been standardized and continuously updated by OMG (Object Management Group) and INCOSE (International Council on Systems Engineering) at the initiative of MBSE.
Furthermore, from the perspective of modern system evolution, Cyber Physical System (CPS) is defined as an autonomous, adaptive and intelligent system in which communication, computing, and control(C3)components dominate physical behavior. The application of M&S will involve multiple levels of concept, specification, and operation in CPS engineering (CPSE) – to use formal methods to express basic concepts (such as structure, state, events, concurrency, etc.) and their relationships, to represent the system studies (problem) in the real world as a model, and to verify the implementation of system behaviors and functions (solution) by executing various simulation instructions through a simulation engine [8]. Therefore, CPS is an advanced hybrid form of system and be modeled in some very distinctive ways, such as computational elements for discrete modeling; physical elements for continuous modeling; communication networking for probabilistic; and even a game theoretic for operations research to support planning and decision making [9].
2.3. Multi-Paradigm Modeling
The essential of our research is on the application of M&S throughout the swarm life-cycle to Initiate MBSE, thereby it’s needed to collaborate on various models at various levels and stages of concept, specification, and operation. Hereby, we should select Multi-Paradigm Modelling (MPM) as a underlying approach to utilize and synthesize so many different modeling techniques for a swarm to achieve the integration of modeling paradigms, model transformation techniques, and compositional modeling methods. MPM is a key method that provides a solid foundation for the design process for CPS.
Hereby, the most critical issue is the distinction between modeling patterns, which requires us to analyze the respective characteristics of exploratory and constructive modes and the way they are combined. The two model modes adopt different properties in order to reach their respective goals, because of the originations from different schools of thought and different application goals. For example, exploratory modeling is growing from the bottom-up that focuses on describing an open world; Constructive modeling is a perspective from top-down that focuses on proposing a closed-form solution. However, it is the inherent differences between the two modeling patterns that form the necessary complementarity. Exploratory modeling aims to explain domain concepts by describing them, usually in the form of classification, and typically uses modeling languages such as Web Ontology Language (OWL) to specify taxonomy and Description Logic (DL) for reasoning. On the contrary, the purpose of constructive modeling is to establish a domain solution by prescribing nominal types for all elements of the domain, and is supported by modeling languages, i.e. SysML and first order logic via constraint languages such as OCL, understanding instances of all types through instantiation relationships [10].
Given the goal of hierarchical swarm modeling, different models are actually required at different abstraction of levels. However, we can exquisitely apply the same modeling language to simultaneously solve the challenges of cross abstraction level semantic association and executable model continuous transmission. For example, exploring the concept of swarm operation is still an open domain of knowledge, which means that the swarm ontology will exert the advantages of exploratory modeling; For the development of autonomous unmanned systems, we hope to guide the rapid configuration of the system based on a meta-model across multiple domains. At this point, the meta-model will become the model template for system construction. The most intuitive way to solve the semantic connection between the two modeling methods is to use the same modeling language, such as SysML.
2.4. Behavior-Based System for Autonomy
The concept of swarm derives from biology and refers to a group of a large number of biological individuals to work together to accomplish some complex collective behaviors, where a single individual or any uncooperative individuals cannot perform such useful tasks without the help of the rest of swarm, such as flocking of birds and schooling of fish, or colonies of bees and so on.
A reasonable way to develop and evaluate intelligence is to understand the ability of natural organisms to handle real-world complexity. The main goal of behavior-based systems is to solve the control problems and applications of single or multiple robots (autonomous systems). The concept of basis behaviors has the explicit nature of modularity, and the behavior-based systems can be presented as building blocks with the properties of functional decomposition and sequential inter-dependencies to enable the autonomous system to reason in a complex challenging environment and making its adaptive behavior [11]. The swarm ontology creates a common conceptualization that can be shared in model transformation and association by all those involved in an engineering development process [12].
In line with the tendency of top-down methodology in MBSE, the high-level functional models should be specified before decomposing to lower-level functions. Especially supported by SysML, we make use of the diagrams of Use Case, Activity, Sequence, and State Machine to model system behaviors in a consistent and coherent way, and successively throughout the behavior abstraction level of black-box in larger environment, business flow with several functional divisions, interactions among a group of elements and a specific states and events in an element unit. Our approach will first focus on behaviors at the swarm high-level and then to decompose into the distributed system by developing modular, scalable, reusable and tailored behaviors that execute the intended swarm operation [13].
We refer the autonomous strategic mechanism of autonomous system as the process of decision-making by taking information about the environment via sensors, and processing it to make decisions about how to execute actions, which also as a computational architecture on the level of individual system. To effectively apply the State Analysis method in the context of complex control system, [14] provides an ontological definition of the concepts and relations to map State Analysis into a practical extension of SysML.
The Discrete Event Systems Specification (DEVS) in a M&S-driven paradigm should be implemented by integrating swarm ontology to offer a life-cycle control according to scenarios, and it becomes particularly important to predict and test the behaviors of both swarm and individuals. DEVS is a popular model-based way to perform modeling and simulation to connect the activities of MBSE, and combines discrete, continuous and hybrid models in a formal way. The block-based unit is modeled to build modular and hierarchical structure, which can be interconnected through input or output ports with self-contained behavior [15]. A model transformation approach is proposed to simulate hybrid SysML models under a DEVS framework and to depict hybrid models, and simulation-related meta-models with discrete and continuous properties are extracted from SysML diagrams, which refer to BDD (Block Definition Diagram), IBD (Internal Block Diagram), SMD (State Machine Diagram) and PAR (parameter diagram). Following the OMG’s MOF, DEVS meta-models are constructed based on the definition of DEVS formalism, including discrete, hybrid and coupled models. Such an approach may facilitate the modelers to use a DEVS-based simulator to confirm complex systems models [16].
2.5. Digital Twins in L-V-C Platform
Some components in autonomous CPS must have learning capabilities to adapt to the external environments, so it is also an agent-based system. The subject of agent-based development and testing platforms makes the clear connection between intelligent, adaptive, and autonomous CPS and its “digital twin” (DT) in form of intelligent software agents within a situated virtual context that replicates the nature of the physical environment. [8]
Through the application of the digital twin of a system, we will have possibilities to analyze and test various operational scenarios on the complex swarm before its physical implementation. A digital twin is a virtual representation which is based on the digitalization of physical systems to allows modeling the state of a physical entity or system, and it is created by digitalizing data collected from physical entities through sensors, so various predictions could be made by understanding the behavior of the physical entity [17].
The digital twin consists of three components, a physical product, a virtual representation of that product, and the bi-directional data connections that feed data from the physical to the virtual representation, and information and processes from the virtual representation to the physical [18]. Although DT deeply relies on the current simulation, it has some significant distinctions from simulations, such as for the whole life-cycle operational processes rather than some detailed design and testing, and behaving in the real world by obtaining real-time data from the physical product not just for the virtual training.
In the M&S environment supporting by MPM, we will go beyond the limitations of the traditional computational models to acquire a full capability needed to investigate emergent behavior of complex systems, which known as Live-Virtual-Constructive (L-V-C) simulation, including live simulation where the model is involved humans interacting; virtual simulation where the model is simulated by a hybrid of humans and computer-generated experiences; and constructive simulations where the model is entirely implemented in a digital computer and even have the high-level of abstraction [7].
Throughout the system’s lifecycle in MBSE, one of the primary tenets is the concept of system to be reused. The digital twin in L-V-C simulation as an analytics framework provides new opportunities to operationalize early investments in system models to perform analysis before the physical asset fielded. Additionally, by leveraging early efforts to define the DT, analytic processes used to verify and validate [19].
In order to establish a substantial and permanent linkage between physical products and virtual representations in L-V-C simulation, we will adopt the solution of Unified Repository (UR) to include various sensor reports, simulation data, and control parameters, etc. Virtual development tools and physical collection tools populate a unified repository of data to achieve two-way connectivity between virtual representations and physical products, thereby forming a virtual/reality hybrid simulation environment platform that covers the interaction of real and virtual spaces [20].
3. The Architecture Framework for Swarm M&S Based on Swarm Ontology
The point of beginning of the research will apply the state of the art in formal system modeling language to the swarm ontology and effectively solve the problem of executable representation of the swarm system. Moreover, we introduce the ConOps of swarm in a domain-specific, and then to embed some semantics into the abstract models and to transfer specific design features to the development process of unmanned systems in MBSE. Further, we will be able to build a co-design and co-simulation architecture framework which integrates the macro system model of the swarm and the micro individual agent-based run-time model, and supports the virtual and physical hybrid mode, thus develops a technical path for the conceptualization development and contextualization evaluation of the autonomous system swarm.
The overall research blueprint of this study shown in Figure 1,it's very useful to bridge the gap between the operational level of planning and the design solution level of autonomous system units. The content and work of this article mainly lie in the following four aspects:
- Firstly, at the beginning of framing the problems in the complex context, the innovative ConOps of swarm and it's novel capability requirements should be derived and deducted, and currently we will give full play to the integrated application advantages of model driven engineering (MDE) and multi-paradigm modeling (MPM) to break through the traditional feature-based modeling function of Web Ontology Language (OWL) technology and protégé software to define swarm ontology in a conceptual model based on System Modeling Language (SysML) which is more formal and executable. So as to achieve explicit knowledge representation and logical reasoning throughout the three levels of macro-meso-micro, it will support the linkage of transition from the swarm overall characteristics to the system design features in the way of decomposition and breakdown, and then convey and map into the component specifications in the development of unmanned systems.
- With the applying of the process and method of MBSE and the flexible extension mechanism in system model on SysML, we are particularly interested in the dominant features of intelligence, adaptability and autonomy within heterogeneous unmanned systems in multi-domain (such as space, air, ground, sea, etc.) and dedicated to establish the meta-model framework and its corresponding meta-modeling process for those systems. Therefore, focusing on the functional & logical model (mainly by SysML) and the mathematical-physical model (mainly by Modelica), our approach will further enhance the mode of the domain-specific modeling language (DSML) and its integration framework (via the SysPhs specification of OMG) of the general unmanned systems to define, develop, integrate and verify the implementation under the use cases of vehicle maneuver, autonomous control, information interconnection, mission coordination and so on.
- For the application of the "Real" and "Virtual" nodes in a hybrid space to simulate typical complex swarm scenario, we will define the format of UR (Unified Repository) for both the digital model (digital twin) and the physical entity in a common representation model of the unmanned system. In the current mature spatio-temporal information system, it will embed the Agent-based mathematical models and the collecting data of the physical entity about movement, navigation, command and control, communication, etc., we will build a co-design and co-simulation environment which supports virtual/real mixing operation to visualize the overall and global swarm application, and to verify and validate the conceptualization of autonomous unmanned swarm.
- And at last, considering the swarm ontology technology of autonomous unmanned system as the main thread in our research, and across the conceptual model - functional and logical model - mathematical physical model, we will develop the technology of the integration environment of multi-level and multi-paradigm collaborative model and simulation, and which will become a technical evolution platform of experimental frame to support the development and evaluation of complex behaviors [21], such as swarm environment awareness and cognition, collaborative task planning and decision-making, information interaction and autonomous control, and others. We will take out a hierarchical, composable approach to the swarm development and experiment framework which is mainly composed of ConOps, capabilities, architecture, and parameters.
4. Modeling and Simulation Methods and Their Applications
The M&S and its applications in the autonomous swarm framework involve the following four levels: the definition of swarm ontology, the system development with meta-model and meta-modeling, multi-agent M&S for autonomous CPS, and V&V in a virtual/reality hybrid integration environment.
4.1. The Declarative Modelling for Swarm Ontology
This section serves as the basic theory and top-level guidance for our methodology and emphasizes a complete description of system conceptualization and contextualization from the loop of Concept-Design-Implementation-Operation (CDIO) to make the ontology as a fundamental approach to addressing swarm complexity, thereby also reflecting the basic key drivers and processes of MBSE and the innovation of specific engineering application. Therefore, in the context of complex operations, the architecture framework is placed at the intersection of the above four CDIO domains of complex system. It is highlighted that the functionality and characteristics of the systems and elements within the overall framework and should be considered during the mission concept, which requires to establish a top-level framework for analysis and synthesis concentrating on the architecture model of the swarm ontology. The goal of the work to entirely model a problem in business terms without refining into the solution or its implementation, which relating to the CIM (computation-independent model) of MDA [22].
For our study and other AI systems, what "exists" is that which can be represented in models. For the research of complex systems such as swarms, the formal representation of autonomous systems based on ontology is currently one of research hotspots, while modeling and simulation is regarded as the most effective solution. Our aim in the research is to provide a comprehensive modeling framework for future applications of swarm ontology that enables us to leverage the advances in the graphical modeling languages (such as SysML) and the process of MBSE, while further enabling us to perform formal analyses of consistency and correctness with respect to the ontology of the domain of swarm.
The ontology is traditionally defined in OWL2 with the open-source ontology tool, such as Protégé [10]. In order to reason about properties of concept model and particularly facilitate to simplify the model-to-model transformation from one domain into another in MBSE, SysML has the same abilities with OWL2 to map the domain concepts into SysML entities or relations without affecting the concepts. While in SysML, Block Diagram (BD) has enough expressiveness to represent detailed designs. When we suitably restrict SysML block diagrams and it can be translated into OWL2 to achieve the equivalent effect. A SysML Block Diagram is a kind of first order equational logic and provides an abstract syntax for the kind of terms, in which logical axioms are expressed using equality, instance of, and subclass relations between terms. The knowledge presentation of a system of concepts is suitable for representing designs will have distinct “has a part of” properties with domain and range classes that represent the graph structure of the BD, and with a cardinality restriction on these properties to depict the number of instances of the class during implementation [23].
The general principle is to map swarm ontology into SysML to define the ontological concepts and relationships as SysML constructs that can be applied to appropriate modeling entities: concepts to blocks, and relationships to semantically compatible SysML relationship. See Figure 2, example of autonomous swarm ontology model for a mission-specific. The macro behavior corresponds to the swarm tasks, that is, autonomous swarm need to possess top-level capabilities to achieve their mission; The meso behavior to teaming strategy, which refers to the collective behavior of autonomous system to be negotiated in interaction with the outside world; The micro behavior to atomic actions, which are various operations that autonomous system individuals should possess.
4.2. Meta-Model and Mata-Modeling Supporting to Autonomous System
Modeling languages such as SysML provide particularly useful graphical syntax for human understanding. However, because it only contains abstract semantics, it is necessary to add concrete semantics related to domain knowledge for domain-specific applications. The essence of a meta-model is to create an intermediate layer between a common abstract modeling language and specific implementation instances to represent domain knowledge. Its key role lies in achieving business knowledge extraction and model reuse. The process of creating a meta-model, which we call meta-modeling methods, has also become a core activity in implementing specific practices of MBSE methodology. In order to overcome the learning curve of modeling languages, methods, and tools, meta-modeling and meta-modeling will become key enablers for promoting the transformation of traditional systems engineering processes and methods to MBSE.
Model driven architecture is a process that focuses on models and is driven by model mapping. The system development approach in the MDA environment is to accurately describe different problem space by creating various models during development activities and using model transformations to drive the entire development process, including analysis, design, and implementation. The platform-independent model (PIM) is then built by specializing the run-time properties in SysML diagrams, such as the unmanned adaptive control units and their dynamic evolution, which reflect the structures and behaviors of the design components.
This section mainly introduces meta-models with unified semantic interpretation for the behavior model of artificial intelligence systems, which can be used as a reference to guide the specification and implementation of various autonomous unmanned systems across many domains in the MBSE process, such as unmanned aerial vehicles (UAV), unmanned ground vehicles (UGV), unmanned underwater vehicles (UUV), etc.
On the viewpoint of Command, Control, Communication (C3), the interoperability means information interaction between unmanned system and others, information sharing and task allocation between different command levels and different units, e.g. STANAG 4586 - Standard Interfaces of UAV Control System (UCS) for NATO UAV Interoperability define data format, interface requirements, communication protocol, etc. [24]. While on another viewpoint of Open System Architecture, we should consider Common / Open architecture, modular component, test verification and data integration for unmanned system, with another example, SAE standard: The Joint Architecture for Unmanned Systems emphasize to capture and categorize common interfaces and services to enable continued growth of the standard set and robotic technology [25].
The primary paradigm of artificial intelligence (AI) is mainly knowledge-based system, in which the knowledge related to application domains, external environment and decision-making process, will be defined and presented via symbolic models. On the other hand, MBSE advocates the specification, analysis, design, verification and validation of systems using formal models. Therefore, for the perspective of the development of modern AI systems, our priority choice is the representation language of symbolic knowledge and the automatic reasoning mechanism based on logical language.
With V-model, it depicts the development activities that go through the ConOps to the integration and V&V that helps identify errors early in the life cycle. However, V-model has a drawback which is rigid and less flexible. However, the walking skeleton model is a lean approach to incremental development, popularly used in software design, and especially suitable for a systems approach to AI implementation to rapidly adjust the scope of a system. It centers on creating a skeleton framework and look like meta-model, which will become the heart of the model-based, and the architecture can be configured and optimized to ensure that the system is enhanced [26].
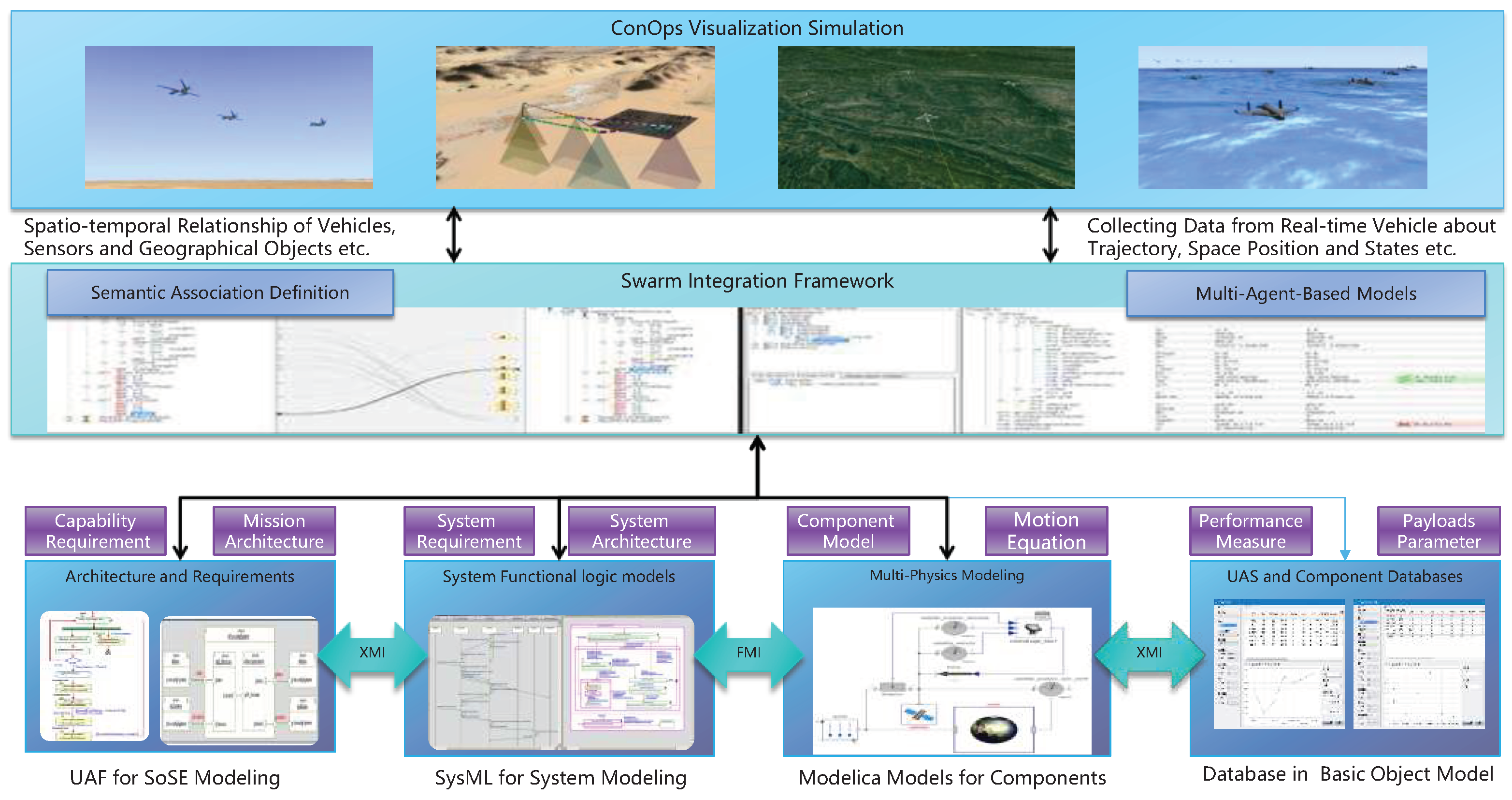
Different from the traditional application of V-model, while for complex development and simulation processes such as swarm, we should have a digital system prototype at the beginning which to connect the development of the top-level SoS and the design of the underlying multi-disciplinary components of unmanned systems. we will incrementally create and deploy a coherent and consistent Digital System Model (DSM) - integrating specific models as a source of digital-twin of system specification, design, analysis, verification, and validation. System architecture represents its structure, behavior, and constraints of complex systems to deliver an effective solution to the needs of stakeholders. Therefore, the meta-model is the initial prototype for the system architecture, therefore, which will serve as the starting point for system development, and support the system evolution in a M&S environment. The process to develop meta-model is also a micro cyclic iterative development process within the whole framework. Following the idea of Model Based System Architecture Process (BASAP) [13] to connect or transform from SoSE mission architecture to system architecture, the first mapping to convert capabilities into Operational Viewpoints (OVs); The next mapping to transform the OV into a logical/functional viewpoints (LV), where the refinement of system elements, services, functions, interactions, and behaviors is carried out; Then, the development of physical specifications is accomplished by mapping LV to physical viewpoints (PVs). Synchronously, Digital System Models of autonomous system support the M&S of complex dynamic systems, particularly such as swarm, and allow engineers to continuously express new solutions and conduct L-V-C online testing before implementation. See Figure 3, examples of SysML diagrams and Modelica models in the meta-model for unmanned aerial system (UAS) with typical composition and synthesis.
In our methodology, we will firstly clarify and explain the afore-mentioned conceptual models in swarm ontology among the stakeholders and/or team members, which as the whole and iterative context of the system definition and the engineering process of autonomous vehicles, and then to apply the approach of meta-model to capture and specify the technical information need to be developed for the DSM in communication and computation, command and control, motion planning, perception and other knowledge representation about problem description and solution specification to support decision-making Within MBSE.
4.3. Multi-Agent-Based M&S for CPS
The intelligence of an artificial system is due to the emergent properties in a complex context, such as a swarm, which can be described as results of the interactions among their components and the environment. There's a reasonable prospect that the intelligence of a system should not only be formed from an abstract symbolic system in advance of its operations, such as automatic reasoning based on logic. However, the intelligent behavior of a system should emerge as a composition of simpler agents structured in a certain way and acting their interactions with others and with the environment [7].
Multi-agent-based simulation is an advantageous solution due to its excellent ability to cope with diverse models ranging from simple entities usually called reactive agents to more complex cognitive agents. Within the unified conceptual framework, the modelers can easily handle different levels of representation, for instance individuals and swarms [27]. Within the framework of artificial intelligence, multi-agent systems (MAS) have been characterized by offering a potential solution to the development of complex problems with distributed properties [28]. Due to the nature of hybrid control and real-time in CPS with the controller and physical components to sense, control, and operate in a complex physical environment, multi-agent-based development will be of great importance in the domains of CPS such as unmanned vehicles.
As for the definition of the swarm ontology, it’s deemed to be a macro model to reflect the overall operational mission tasks. Now, it is necessary to consider the autonomous teaming strategic mechanism in a swarm as a meso model, and individual actions as a micro model. Now, we choose a multi-agent-based approach to convert the latter two behaviors into the computational models. Among them, the determination of autonomous team strategy lies in the bionic research on teaming collaboration rules in creature swarm, such as flocking of birds and schooling of fish, or colonies of bees and so on, which aiming to achieve the simulation and verification of social behaviors such as grouping, following, negotiation, and divisions and cooperation of autonomous system. Alternatively, individual behaviors mainly present activities such as maneuver, avoidance, detection, communication, and control and others, and both of them involving discrete, continuous models or their combination. See Figure 4 and Figure 5, respectively, for the autonomous teaming strategic model and the state machine model of the individual behavior of swarm.
4.4. V&V in a Hybrid Virtual/Real Integration Environment
A swarm is a dynamic system of systems (SoS) in which components are autonomous systems or other related enabling systems such as legacy regional communication networks or supporting infrastructure, etc., which adapting to the current context and mission to assemble or decompose components. Although involving so many different modeling paradigms, it is necessary to establish an overall simulation environment to support the analysis and verification & validation of operational concepts.
The M&S application throughout MBSE needs to integrate structural modeling and dynamic behavior modeling in the architecture of the DSM, which provides a complete picture of the swarm. In order to meet the needs of various ConOps, design elements are effectively integrated (static structure) and use cases at all levels are employed to justify the requirements and interactions (dynamic behaviors). The characteristics of MBSE to ensure that the architecture can cover the all use cases, systems and components, and drive end-to-end M&S to verify according to the attributes and behavior of the models of systems and components [21].
Hybrid Virtual/Real integration is a digital experimental frame (EF) to support scenario-based verification and validation of swarm, where the discrete events of swarm as the engine of constructive models to drive the behavior of multiple distributed autonomous individuals (simulation). According to logical structure and dynamic behavior of the autonomous system in swarm, a run-time computational model of virtual individuals is implemented as agent-based models, and the format of Unified Repository (UR) is defined to receive, send and store data with the real ones in the M&S environment. This is a comprehensive demonstration platform of the integration of swarm ontology in concept model, DEVS, system logical structure and behavior, multi-agent model and collecting data to contribute to the employment and evolution of swarm, and see Figure 6, an Integrated L-V-C modeling and simulation framework for swarm V&V.
5. Discussion
With the accelerated progress of theories and technologies related to systems engineering and AI, it's convinced that we will have a great variety of operational scenarios in the future evolving for the systems with autonomy and unmanned, intelligent and human-machine collaboration. As a subversive technology that changes the game rules of a wide range of social behaviors, the application of swarm is increasingly attracting attention, and it will gradually become a reality to effectively carry out some complex mission tasks such as penetration reconnaissance, decoy jamming, cooperative attacks detection, and Joint confrontation in complex environment.
This research applies the ontology modeling with MBSE foundations and practices to formalize and integrate the architecture framework and its V&V environment for an autonomous unmanned swarm. We introduce a top-down, hierarchical fashion from an overarching concept model and map into multi-paradigm modeling and multi-agent-based simulation at multiple levels of system design elements, which are bottom-up focusing on the behaviors of individual agents and autonomous teaming strategic mechanism. In this paper, we also outline some research works to build a comprehensive modeling and simulation frameworks to combine models for swarm ontology which present complex operational concepts and system specification which express the dynamic structure and behavior of autonomous systems, and incorporate decentralized communication, distributed control, self-adaptation planning and optimization as design elements of the engineered systems. It would be useful to develop and verify autonomous swarm in an evolving framework. And with a Virtual/Reality hybrid simulation environment, we aim to build a foundation toward the long-term capability to enhance human-machine cognitive collaboration and the manned-unmanned teaming strategic mechanism on the supporting of the state of the art of MBSE and AI.
References
- Burkhart, R. A Swarm Ontology for Complex Systems Modeling. In Proceedings of the Symposium on Complex Systems Engineering, Santa Monica, CA, USA, 11–12 January 2007. [Google Scholar]
- Giles, K. A Framework for Integrating the Development of Swarm Unmanned Aerial System Doctrine and Design. Available online: https://docslib.org/doc/7281488/a-framework-for-integrating-the-development-of-swarm-unmanned-aerial-system-doctrine-and-design (accessed on 5 September 2021).
- Giles, K.; Giammarco, K. A mission-based architecture for swarm unmanned systems. Systems Engineering 2019, 22, 271–281. [Google Scholar] [CrossRef]
- Navarro, I.; Matía, F. An Introduction to Swarm Robotics. ISRN Robotics 2012, 2013, 1–10. [Google Scholar] [CrossRef]
- Gorodetsky, I.; Samoylov, V.V.; Trotskii, D.V. The Reference Ontology of Collective Behavior of Autonomous Agents and Its Extensions. Computer and Systems Sciences International 2015, 54, 765–782. [Google Scholar] [CrossRef]
- Schlenoff,C.; Prestes, E.; Madhavan, R.; Goncalves, P.; Li H.; Balakirsky, S.; Kramer, T.; Miguelanez, E. An IEEE standard Ontology for Robotics and Automation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and System, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 1337–1342.
- Castro, R.D.; Marcosig, E.P. , J.I. Simulation Model Continuity for Efficient Development of Embedded Controllers in Cyber-Physical Systems. In Complexity challenges in cyber physical systems: using modeling and simulation (M&S) to support intelligence, adaptation and autonomy, 1st ed.; Saurabh, M., Andreas, T., Eds.; Willy: Hoboken NJ, USA, 2020; Volume 1, pp. 193–220. [Google Scholar]
- Saurabh, M.; Andreas, T. The Complexity in Application of Modeling and Simulation for Cyber Physical Systems Engineering. In Complexity challenges in cyber physical systems: using modeling and simulation (M&S) to support intelligence, adaptation and autonomy, 1st ed.; Saurabh, M., Andreas, T., Eds.; Willy: Hoboken NJ, USA, 2020; Volume 1, pp. 3–16. [Google Scholar]
- Walid, M.T.; Abd-Elhamid, M.T.; Johan, T. Cyber-Physical Systems: A Model-Based Approach, 1st ed.; Springer: Cham, Switzerland, 2021; pp. 5–12. [Google Scholar]
- Dominique, B.; Rima, A.; Mauro, I.; Bedir, T.; Holger, G. An ontological foundation for multi-paradigm modelling for cyber-physical systems. In Multi-paradigm Modeling Approach For Cyber-Physical Systems, 1st Ed.; Bedir, T., Dominique, B., Hans, V., Miguel, G., Paulo, C., Vasco, A., Eds.; Elsevier: London, UK, 2021; pp. 9–43. [Google Scholar]
- Matarić, M.J.; Michaud, F. Behavior-Based Systems. In Handbook of Robotics, Siciliano, B., Khatib, O., Eds.; Springer: Berlin, DE, 2008; pp. 899–909. [Google Scholar]
- Bermejo-Alonso, J.; Sanz, R.; Rodrguez, M. , Hernndez, C. An Ontological Framework for Autonomous Systems Modelling. International Journal On Advances in Intelligent Systems 2011, 3&4, 211–225. [Google Scholar]
- Borky, J.M.; Bradley, T.H. Effective Model-Based Systems Engineering; Springer: Berlin/Heidelberg, Germany, 2019; pp. 23–96. [Google Scholar]
- Wagner, D. A.; Bennett, M. B.; Karban, R.; Rouquette, N.; Jenkins, S.; Ingham, M. An ontology for State Analysis: Formalizing the mapping to SysML. In Proceedings of the IEEE Aerospace Conference, MT, USA, 3-10 March 2012; pp. 1–16. [Google Scholar]
- Zeigler, B.P.; Kim, D. Discrete Event Systems Specification (DEVS), MBSE, and Digital Engineering. Available online: https://www.researchgate.net/publication/355108235_Discrete_Event_Systems_Specification_DEVS_MBSE_and_Digital_Engineering (accessed on 15 October 2022).
- Wu, X.Q.; Yan, X.F.; Li, X.C.; Wang, Y.Z. Simulating hybrid SysML models: a model transformation approach under the DEVS framework. The Journal of Supercomputing 2023, 2010–2030. [Google Scholar]
- Mendi, A.F.; Erol, T.; Doğan, D. Digital Twin in the Military Field. IEEE Internet Computing 2021, 6, 33–40. [Google Scholar] [CrossRef]
- Jones, D.; Snider, C.; Nassehi. ; Yon, J.; Hicks, B. Characterising the Digital Twin: A systematic literature review. CIRP Journal of Manufacturing Science and Technology 2020, 29, 36–52. [Google Scholar] [CrossRef]
- Bickford, J.; Van Bossuyt, D.L.; Beery, P.; Pollman, A. Operationalizing digital twins through model-based systems engineering methods. Systems Engineering 2020, 23, 724–750. [Google Scholar] [CrossRef]
- Grieves, M. Digital Twin: Manufacturing Excellence through Virtual Factory Replication (White Paper). Florida Institute of Technology. 2014.
- Gao, X.H;Zhang Y.Q.; Wang, Z.Q. The Architecture of Digital System Model for Systems-of-Systems Engineering. In Proceedings of the Chinese Automation Congress (CAC), IEEE, Hangzhou, China, 22–24 November 2019; pp. 2744–2747.
- Van Hien, N.; Diem, P.G. A Practical Specialization of MDA/MBSE Approach to Develop AUV Controllers. Journal of Marine Science and Application 2020, 20, 102–116. [Google Scholar] [CrossRef]
- Graves, H. Integrating SysML and OWL. In Proceedings of the 6th International Conference on OWL: Experiences and Directions, October 2009; Volume 529, pp. 117–124. [Google Scholar]
- docslib.org. Available online: https://docslib.org/doc/13475156/stanag-4586-standard-interfaces-of-ucs-for-nato-uav-interoperability (accessed on 5 January 2021).
- English, R. The Joint Architecture for Unmanned Systems, A Set of SAE Interoperability Standards. SAE Technical Paper 2009, Volume 2009-01-3250. [CrossRef]
- Badiru, A.B. Artificial Intelligence and Digital Systems Engineering, 1st ed.; CRC: FL, US, 2022; pp. 43–63. [Google Scholar]
- Drogoul, A.; Vanbergue, D.; Meurisse, T. Multi-Agent Based Simulation: Where are the Agents? MABS 2002: Multi-Agent-Based Simulation II 2003, Volume 2581. pp. 1–15.
- Julián, V.; Botti. V. Multi-Agent Systems. Applied Sciences 2019, 9, 1402. [Google Scholar] [CrossRef]
Figure 1.
The overall research blueprint of this study.
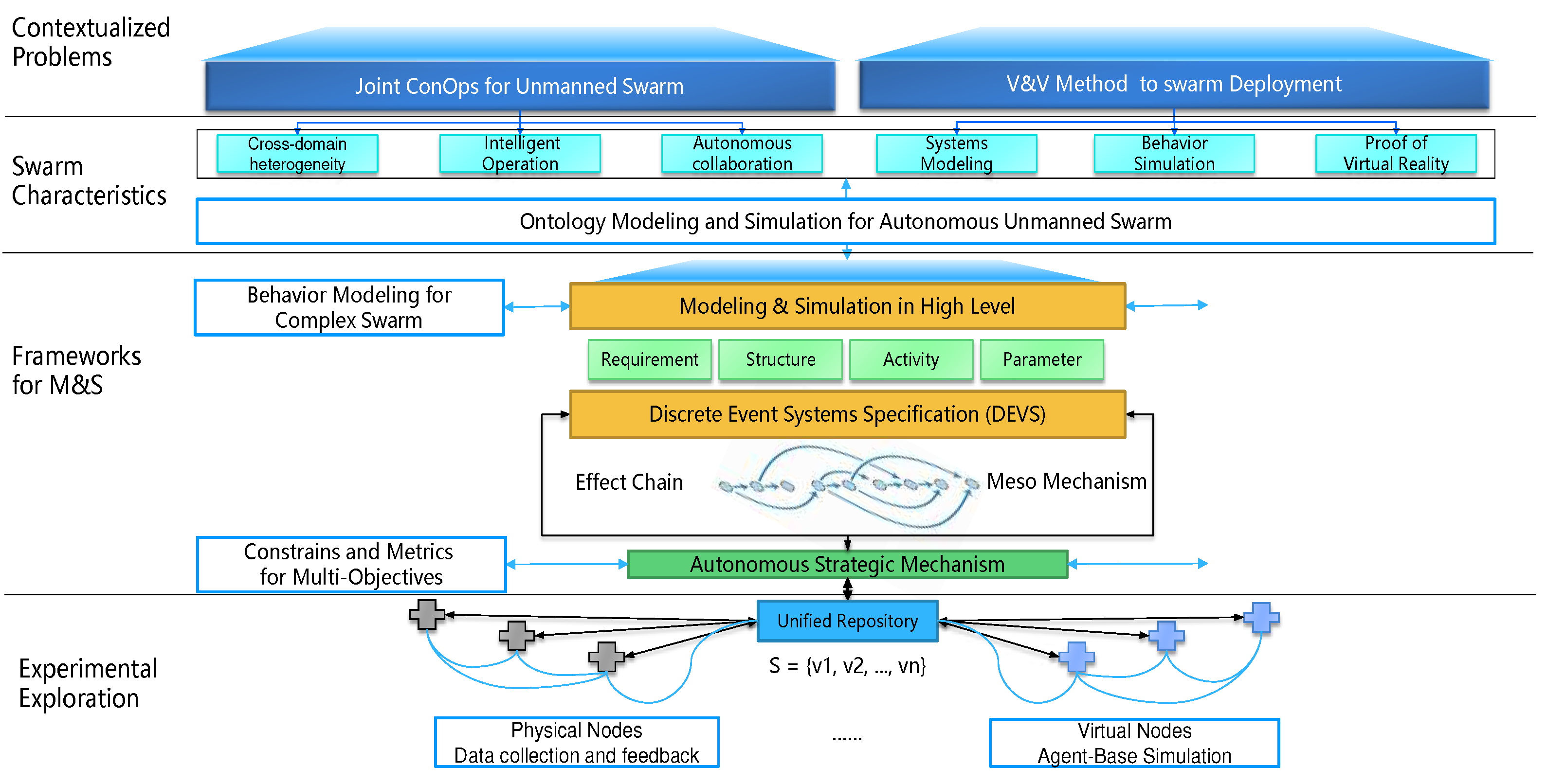
Figure 2.
Example of swarm ontology model for a mission-specific.
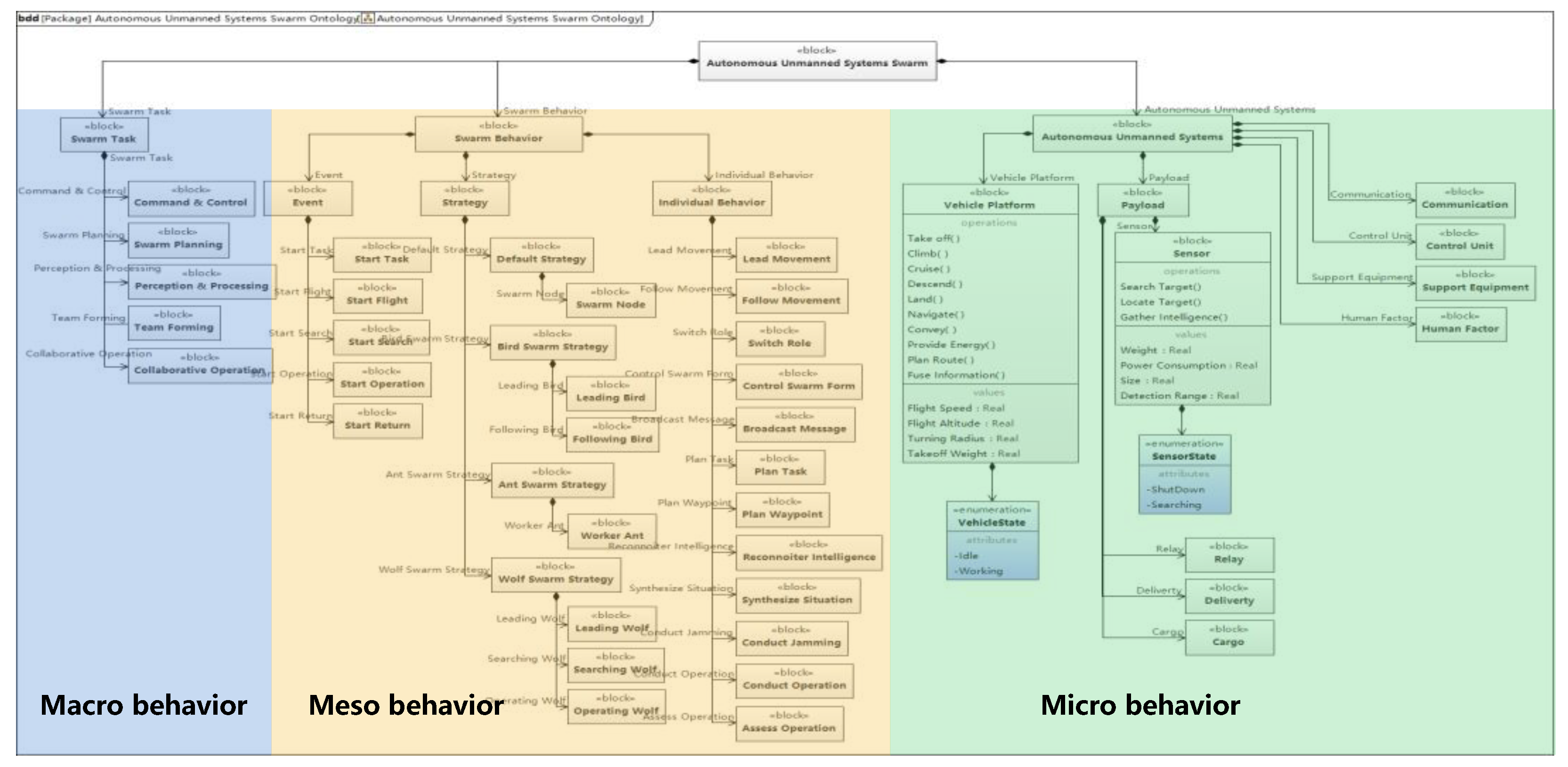
Figure 3.
Examples of SysML diagrams and Modelica models for a meta-model of UAS.
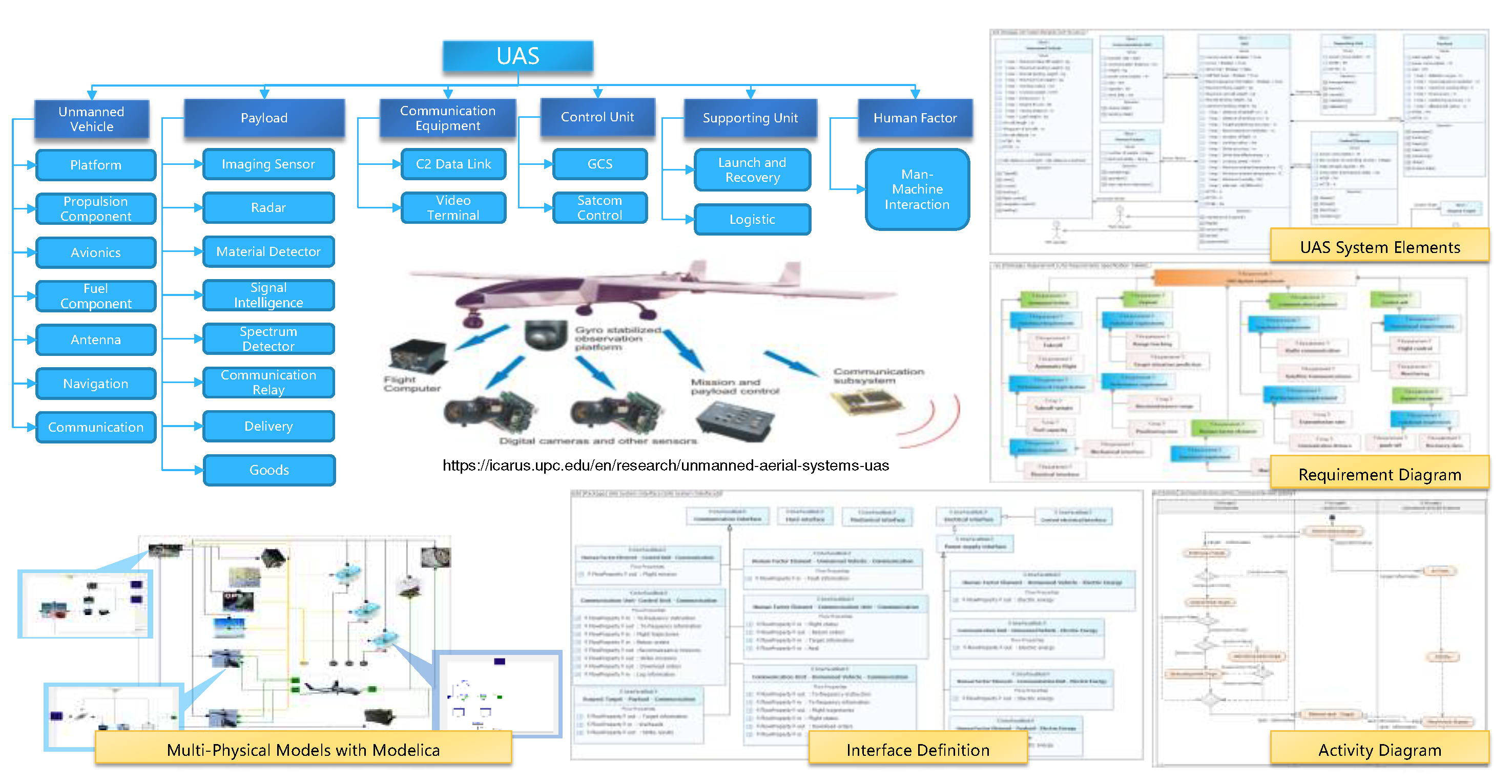
Figure 4.
The autonomous teaming strategic model (activity diagram) of swarm.
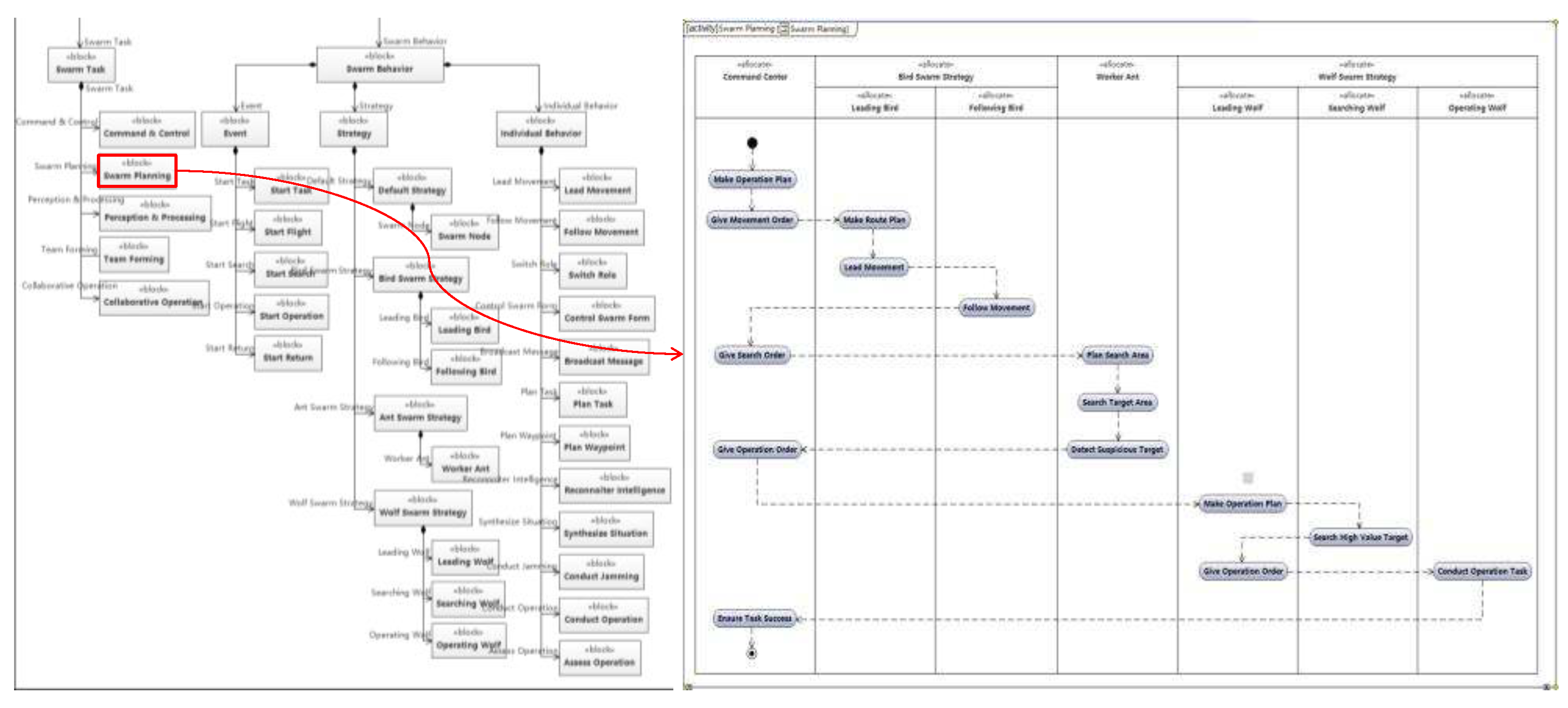
Figure 5.
The behavior model (state machine diagrams) of individual autonomous system.
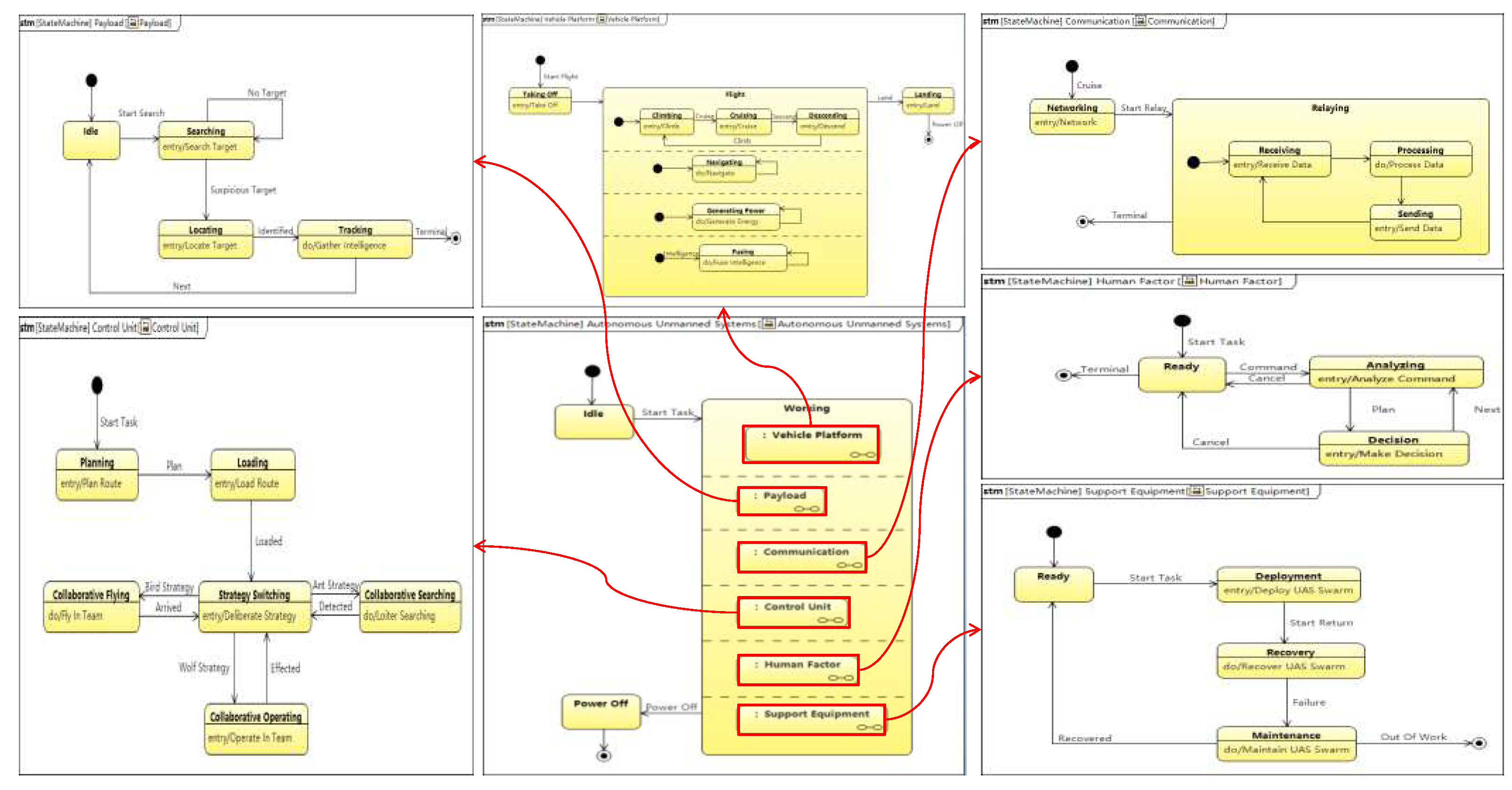
Figure 6.
An Integrated L-V-C modeling and simulation framework for swarm V&V.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



