
Submitted:
30 December 2020
Posted:
31 December 2020
You are already at the latest version
Abstract
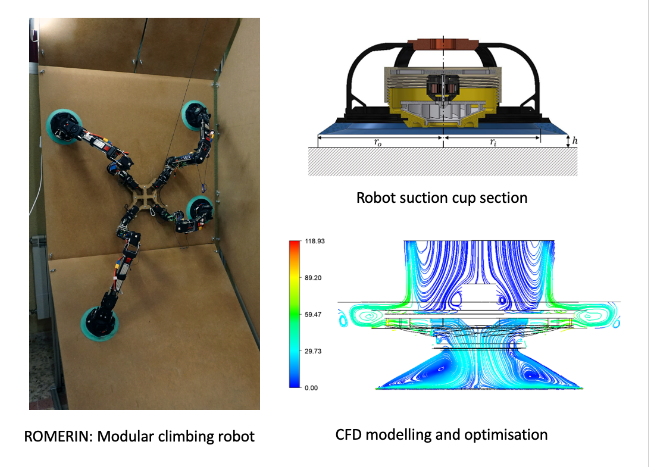
Adhesion systems are very important in robots for infrastructure inspection (especially in vertical walls). They present the challenge of optimizing the ratio vacuum/power consumption in battery-powered robots. In this paper a CFD (Computer Fluid Dynamics) modelling and optimization process of a robot adhesion system is carried out to determine the best performing configuration in terms of vacuum and power consumption. Analytical and numerical models were developed to predict the behaviour of the system for different configurations. The models were validated, using test rig measurements, by calibrating an arbitrary defined inlet height that simulates the leakage flow. Then, different geometric parameters were varied to determine the best performing configuration based on the vacuum/power consumption ratio value. The model presented in the paper was capable of predicting the behaviour of the system for different configurations, with a margin of error of 15% for the vacuum prediction and a 25% for the motor power calculation. Finally, the model was used to optimize parameters of the system, like the number of blades of the impeller. The adhesion system was conceived for the modular autonomous climbing legged robot ROMERIN.
Keywords:
Modular Climbing Robots
; Vacuum Generation
; Computer Fluid Dynamics
; Optimization
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



