
Submitted:
26 July 2019
Posted:
28 July 2019
You are already at the latest version
Abstract
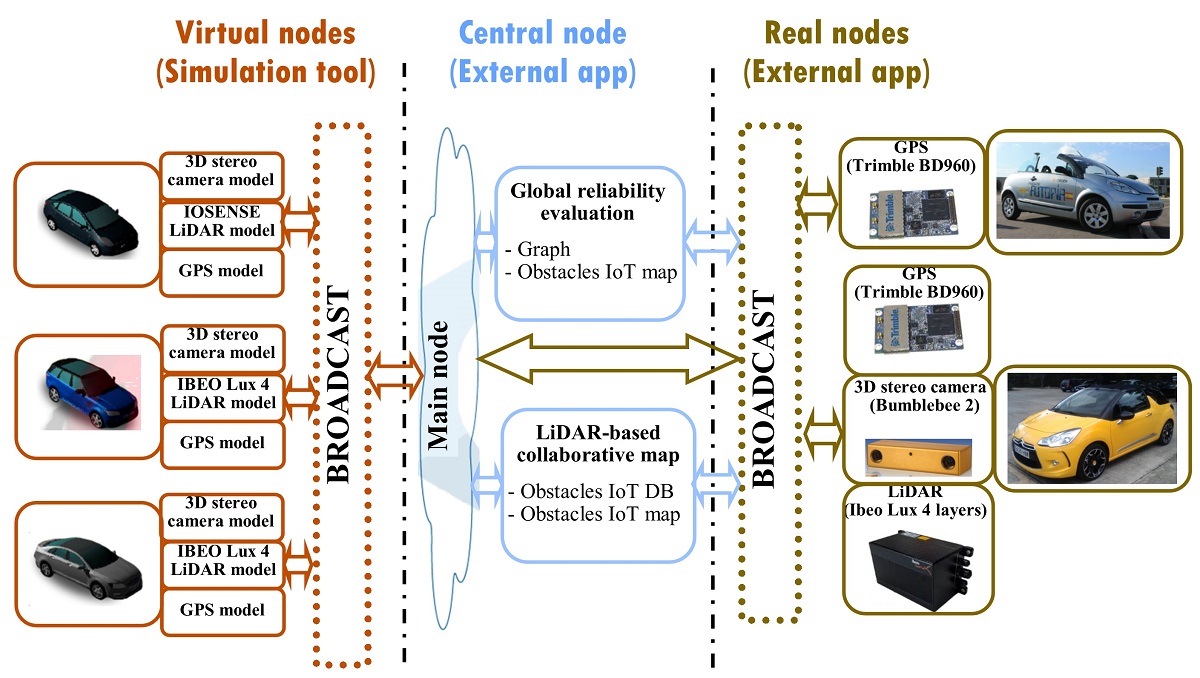
Currently, the most important challenge in any assessment of state-of-the-art sensor technology and its reliability is to achieve road traffic safety targets. The research reported in this paper is focused on the design of a procedure for evaluating the reliability of Internet-of-Things (IoT) sensors and the use of a Cyber-Physical System (CPS) for the implementation of that evaluation procedure to gauge reliability. An important requirement for the generation of real critical situations under safety conditions is the capability of managing a co-simulation environment, in which both real and virtual data sensory information can be processed. An IoT case study that consists of a LiDAR-based collaborative map is then proposed, in which both real and virtual computing nodes with their corresponding sensors exchange information. Specifically, the sensor chosen for this study is a Ibeo Lux 4-layer LiDAR sensor with IoT added capabilities. Implementation is through an artificial-intelligence-based modeling library for sensor data-prediction error, at a local level, and a self-learning-based decision-making model supported on a Q-learning method, at a global level. Its aim is to determine the best model behavior and to trigger the updating procedure, if required. Finally, an experimental evaluation of this framework is also performed using simulated and real data
Keywords:
Cyber-Physical Systems
; reliability assessment
; Internet-of-Things
; LiDAR sensor
; driving assistance
; obstacle recognition
; reinforcement learning
; Artificial Intelligence-based modelling
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



