Submitted:
13 July 2019
Posted:
14 July 2019
You are already at the latest version
Abstract
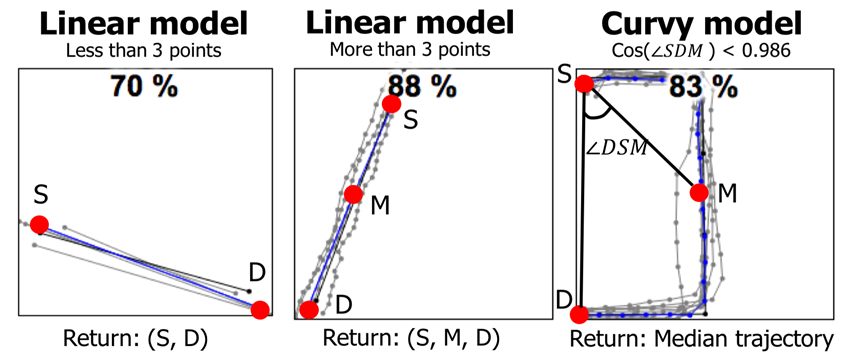
Road segment can be estimated from GPS trajectories by averaging. However, most existing averaging strategies suffer from high complexity or poor accuracy. For example, finding the optimal mean for a set of sequences is known to be NP-hard, while using Medoid compromises the quality. In this paper, we introduce three extremely fast and practical methods for solving the problem. The methods first analyze three descriptors and then use either a simple linear model or a more complex curvy model depending on an angle criterion. The results outperform Medoid and provide equal or better accuracy than the best existing methods while being very fast, and therefore suitable for real-time processing.
Keywords:
GPS trajectories
; segment averaging
; sequence averaging
; HC-SIM
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



