Submitted:
29 March 2019
Posted:
01 April 2019
You are already at the latest version
Abstract
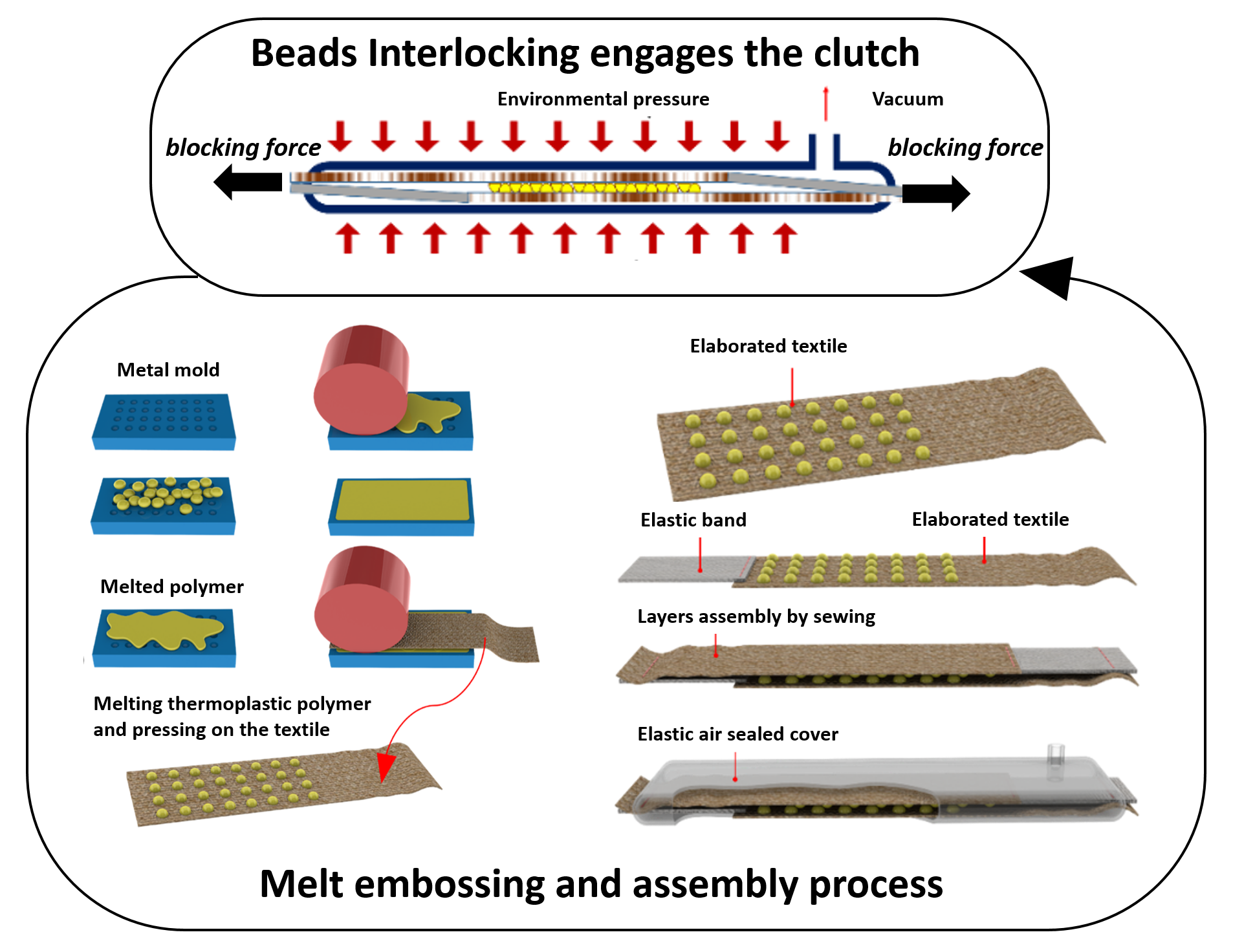
In this paper, we present the design, manufacturing and characterization of a soft textile-based clutch (TBC) that switches between locking and unlocking of its linear displacement by exploiting vacuum stimulation. The applied vacuum locks the relative sliding motion between two elaborated textile webbings covered by an elastic silicone rubber bag. Based on different fabrication techniques, such as silicone casting on textile, melt embossing for direct fabrication of miniature patterns on textile and sewing, we developed three groups of TBC samples based on friction and interlocking principles and we compared their performance in blocking configuration. The clutch with interlocking mechanism presented the highest withstanding force (150 N) respect to the one (54 N) recorded for the friction-based clutch. The simple and compact structure of the proposed clutch, together with the intrinsic adaptability of fabric with other clothing and soft materials, make it a proper solution for applications in soft wearable robotics and generally as locking and variable stiffness solution for soft robotic applications.
Keywords:
soft clutch
; soft robotics
; textile based clutch
; wearable robotics
; soft actuator
; exosuit
; variable stiffness
; stiffness control
; textile
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



