Submitted:
11 November 2018
Posted:
13 November 2018
You are already at the latest version
Abstract
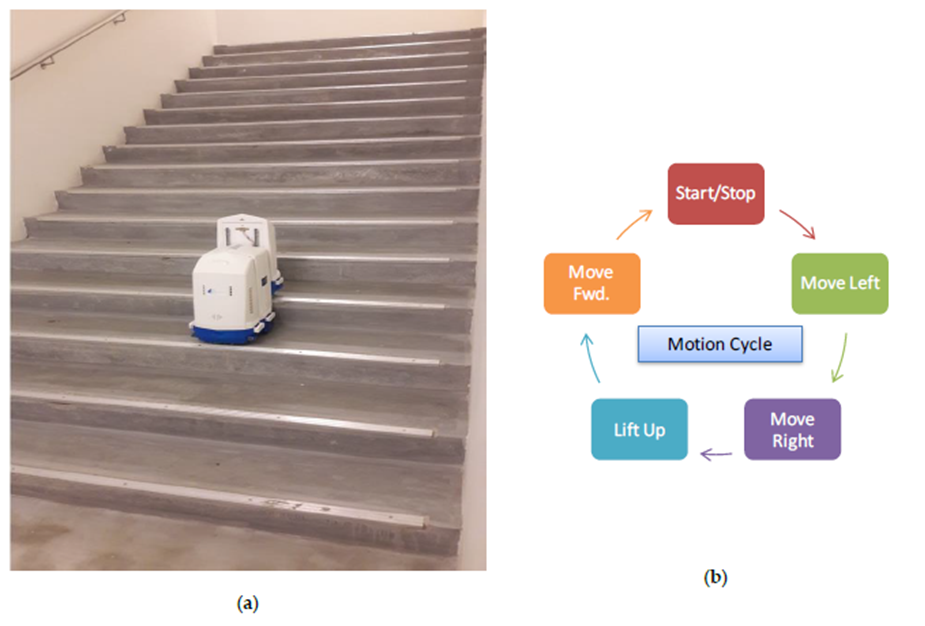
The sTetro is a stair cleaning robot which can climb the staircase with its shapeshifting capabilities. As this robot is intended to traverse multi-floor environment autonomously, hence its localization/positioning information is an essential component of the overall system. Usually, the indoor mobile robots rely on some external system for localization information, e.g., WiFi, UWB, vision, RFID signals, or indoor Global Positioning System (GPS). This requires the installation of additional hardware and/or modification of the working environment for precise positioning information of the mobile platform. As the dimensions of the staircase are known a priori, this knowledge can be used to localize the sTetro robot on the stairs. In this article, the geometry of the staircase has been exploited to localize the robot in 3D space with measurements from the onboard time-of-flight (ToF) range sensors only. The heading angle of the robot is also estimated with two ToF sensors installed in front of the sTetro robot. Results achieved by conducting experiments on real robot prove the efficacy of the proposed approach.
Keywords:
indoor environment
; 3D localization
; staircase geometry
; robotics
; time-of-flight sensors
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



