Submitted:
07 April 2026
Posted:
09 April 2026
You are already at the latest version
Abstract
Cosmic-Ray Neutron Sensing (CRNS) has become a standard method for non-invasive soil moisture monitoring at the field scale. With most CRNS sensors being derivatives from scientific nuclear equipment, the development of instruments based on alternative neutron detection technologies is a major development goal for CRNS. We present a modular instrument family based on boron-10-lined proportional counters, specifically designed for long-term autonomous field operation. The system is controlled by a data logger supporting various telemetry options and external SDI-12 environmental sensors and the frontend electronics with its pulse shape analysis effectively separates neutron signals from background and electronic noise. Our results show high energy efficiency, with the latest generation close to 50 mW, allowing solar-powered operation even in challenging environments. The performance of the instruments has been validated within long-term field deployments in different settings, showing that boron-10-based systems provide a scalable, cost-effective and reliable alternative for the next generation of CRNS monitoring networks.
Keywords:
open hardware
; radiation detection
; nuclear physics
; proportional counter
; Cosmic-Ray Neutron Sensing
1. Introduction
Accurate knowledge about soil moisture as a key variable hydrological cycles, is most relevant in understanding weather patterns and agricultural productivity [1,2,3]. Cosmic-ray neutron sensing (CRNS) [4,5,6,7] has become in recent years an established methodology for non-invasive measurements of soil moisture [8]. With its sensitive volume of the top few decimeters of several hectares [9] it bridges an important gap between point measurements and remote sensing products [10,11,12]. The method relies on the inverse relationship between the near-surface cosmogenic neutron flux and the hydrogen content of the surrounding environment, with soil water providing the dominant contribution [13]. Low maintenance requirements and suitability for continuous long-term observations [14] lead to its integration in larger networks [15,16,17]. Instrumentwise the current development focuses on the transition from helium-3-based to helium-3-free instruments, which makes the method more cost-effective and better scalable. This allows the method to advance into fields of application not only in hydrology, but also in irrigation management, the validation of remote sensing data and climate-resilient monitoring strategies.
1.1. Neutron Detectors for CRNS
CRNS instruments are usually mounted 1–2 m above the ground and can be equipped with two types of sensors: one bare detector for the thermal neutron flux and one counter enclosed by ∼25 mm of polyethylene moderator, making the system most sensitive to epithermal-to-fast neutrons [18,19], which show the strongest scaling for soil moisture. Fast and thermal regimes exhibit a much weaker dependence on environmental hydrogen than the epithermal-to-fast range, but might provide useful information on vegetation and biomass dynamics [20,21,22]. The energy sensitivity (response function) from the usual epithermal detector extends, however, into the thermal and fast domains, which leads to artifacts such as the ’road effect’ [23]. Thermal neutron contamination can constitute up to 20 % of the signal [24] and vice versa the bare detector receives a comparable contribution from epithermal/fast neutrons [25]. Technically, systems are well understood with CRNS detectors tested in neutron reference fields are reported to be in good agreement to Monte Carlo simulations [26].
The common neutron converter types used in CRNS are: helium-3 or boron-trifluoride () and boron-10-lined or lithium-6 gaseous counters as well as lithium-6-loaded scintillators with optical readout. The scarcity of helium-3 motivates adoption of alternative technologies [27,28,29]. The signal response to soil moisture depends on the moderator design, not on the converter itself. The moderator can be modified to partially suppress neutrons from undesired directions [30,31] or thermal contributions [32,33], though at the cost of counting statistics.
1.2. Conventional Detector Designs
Helium-3 acts simultaneously as converter and counting gas. A converted neutron releases 764 keV, shared between a proton (573 keV) and a triton (191 keV) emitted back-to-back. Partial energy loss of one product hitting the tube wall leads to the typical plateau features in the spectrum. Most of the first COSMOS instruments [6] and roving systems [34,35,36,37,38] are helium-3 based. also serves as a neutron converter but is also a quencher, requiring an admixture of a counting gas. This limits the absorption efficiency [39,40] and in combination with their toxicity and it impedes a wider deployment.
1.3. Alternative Solutions for Gaseous Detectors
A micrometer-thick coating of or C on the inner tube wall is used with conventional counting gases such as Ar:CO2 [41]. Because only part of each reaction-product track lies in the gas, the resulting continuous energy spectrum necessitates a low-energy cut-off that increases sensitivity to gain fluctuations or threshold drifts [19], imposing stricter requirements on frontend electronics. The comparably low conversion efficiency per layer can be compensated by multi-tube arrangements [42]. With a very similar design Lithium-6 metal can be used as a converter. An increasing number of CRNS sites now use lithium-based instruments [43,44,45].
CRNS instruments need to be optimized for low count rates. In this respect it is important to note that alpha-emitter contamination in tube materials can reach cm−2 s−1 and, with standard alloys, may account for up to one third of all recorded events, since the resulting continuous energy deposition spectrum overlaps with the signal region [46,47]. High-purity materials or inner coatings of such effectively suppress this background.
1.4. Scintillator Technologies
Neutron scintillation detectors require a converter embedded in a scintillator matrix, a lightguide and a photosensitive element [48]. Two strategies are common: a bulk LiF-loaded scintillator of relatively low converter concentration, or a thin ZnS(Ag) coating highly loaded with converter [49,50]. Scintillators respond to muons, gammas and electrons in addition to neutrons. Signal identification can be realized based on pulse shape analysis [51]. Unlike gaseous detectors, plastic scintillators contain hydrogen and therefore act as moderators themselves.
1.5. Measurement Accuracy and Representativeness
The measurement accuracy of Cosmic-Ray Neutron Sensing is primarily subject to the statistical nature of the low-intensity neutron flux. The precision follows counting statistics where the uncertainty is proportional to the inverse square root of the total number of detected neutrons, leading to the general rule that doubling the precision requires a fourfold increase in either measurement duration or count rate. The absolute uncertainty is also dependent on the measured soil moisture value, see Figure 1 (right). Intervals exceeding 12 hours are generally avoided as otherwise other quantities can be limiting factors including the hydrological dynamics itself. Environmental factors such as elevation significantly influence the count rate, which doubles approximately every 900 m.
The spatial representativeness of the signal is characterized by an exponential decrease in sensitivity in both horizontal and vertical directions, which translates to topsoil and objects in close proximity having a disproportionately stronger influence than deeper layers or distant topologies, see Figure 1 (left).
2. Materials and Methods
Microcontrollers have become a practical basis for the development of neutron detector electronics, particularly when used as digitizer and slow-control units in combination with dedicated analog front-end boards, for further examples see also [52,53,54,55].

Table 1.
Summary of selected microcontrollers and typical development boards or systems in which they are used.
Table 1.
Summary of selected microcontrollers and typical development boards or systems in which they are used.
| MCU | Type / Core | Clock | I/O | Voltage | Used also in |
| ATmega328P | 8-bit AVR | 16 MHz | 14 digital + 8 analog | 5 V | Arduino Nano |
| ATSAM3X8E | 32-bit ARM Cortex-M3 | 84 MHz | 54 digital + 12 analog | 3.3 V | Arduino Due |
| + 2 DAC | |||||
| ATmega16U2 | 8-bit AVR USB MCU | 16 MHz | 22 GPIO | 2.7–5.5 V | Arduino USB port |
| STM32L412KB | 32-bit ARM Cortex-M4F | 32 MHz | 26 digital + 10 analog | 1.71–3.6 V | Nucleo-L412KB |
| STM32U385RG | 32-bit ARM Cortex-M33 | 32 MHz | 51 digital + 17 analog | 1.71–3.6 V | Nucleo-U385RG |
| + 2 DAC |
In our proportional-counter readout the architecture was adapted to fully make use of the technical capabilities of such microcontrollers, which allow for example to measure pulse height and pulse length at very low power consumption at low to medium count rates. Other functional elements like high-voltage supply and the analog signal path require separate components and logic.
The first nCatcher generation was implemented on an ATmega328P-based Arduino Nano platform, see also application references in [17,19,47,56,57,58,59,60,61,62]. In the current system generation, the logger relies on the ATSAM3X8E architecture of the Arduino Due, whereas newer detector-side controller concepts are be implemented on STM32 microcontrollers, see for example [63,64].
2.1. Frontend Electronics: nCatcher
The nCatcher readout board, see Figure 2(left) or [47] for the previous version, integrates high-voltage bias generation, up to five-channels with analog amplifiers, pulse discrimination, peak detection and slow control. The design is intended for low-count-rate neutron detectors which require a maximum of 2000 V. Due to its adaptability, signal pulses of helium, boron or lithium-based detectors can be recorded with a pulse height resolution of 1024 channels. The low-voltage supply features digital 5 V for the controller, digital-to-analog converters (DACs), comparator logic and communication interface.
2.1.1. High-Voltage Supply and Bias Distribution
The bias voltage is generated on-board by a dedicated high-voltage module. Its adjustable output voltage is highly stable against temperature drifts and the actual monitor values of voltage and current are provided.
The high-voltage supply board ’nAccelerator’ converts a 5 V low-voltage input into the detector operating voltage. This module was developed due to the challenging demands of CRNS instruments with respect to high temperature stability, low ripple and noise as well as low power consumption.
On the nCatcher board, see Figure 2(left), the high-voltage output is then routed through a passive filtering network and is distributed to the detector channels through individual 10 M resistors with a 270 pF decoupling capacitor.
2.1.2. Analog Signal Stage
Each channel has an inverting charge-sensitive preamplifier based on a low-bias-current operational amplifier with clamp diode protection. The signal is integrated by 4.4 M with a 1 pF capacitor in parallel leading to a characteristic pulse time of around 4.4µs. The signal then passes a band pass with cutoff frequencies of 24 kHz and 12 kHz and non-inverting amplifier with a gain of 22. One branch is forwarded to the comparator that triggers an output if the analog signal passes a threshold. The time difference between the falling and rising edge is measured as the pulse length. The other branch is fed into an active peak-detector circuit based on a dual operational amplifier, a Schottky diode network and a hold capacitor. The peak value is in that way buffered and read by the microcontroller through an analog input. After conversion, the peak detector is reset by discharging the hold capacitor through an analog switch.
2.1.3. Controller and Interfaces
An STM32 microcontroller serves as the main control unit and interface of the board. It reads the high-voltage monitor outputs, enables or disables the HV module, counts the signal length and reads out the peak-detector via its ADC. The on-board temperature and humidity are recorded in parallel.
For communication with an external system, the board provides a differential I2C interface, which allows for operation with longer cable lengths than foreseen for single-ended I2C and in addition an RS-485 connection. Alternatively, an SDI-12 interface is available for operation with standardized scientific data loggers.
2.2. Pulse Height and Pulse Length Selection
The discrimination of neutron-induced events from gamma-ray background and electronic noise is achieved through a dual-parameter selection of pulse height and pulse length. As boron-10-lined proportional counters have a continuous energy deposition spectrum, one cannot rely on energy thresholds alone as usually the case for helium-3 detectors. The nCatcher electronics analyzes the specific correlation between the peak signal amplitude and the time-over-threshold [19]. This two-dimensional approach relies on a parametrized ’banana-shaped’ signal region characteristic for neutron events and is shown in Figure 3. All events which lie outside the dashed lines are rejected. It has to be noted that due to the color coding the noise region appears to have more events than actually there are - in the inlet one can for example not even see the radionuclide line which stretches out to the right. This procedure allows the instrument to maintain stable performance even under noisy conditions.
2.3. Data Logger
The integration of autonomous sensors into cloud-based networks follows the broader trend of Internet of Things (IoT) applications in environmental monitoring, specially adressing real-time decision support for Smart Farming [65,66]. The logger, see Figure 2(right), serves as the central control, communication and power-management unit of the instrument. Its architecture is not limited to simple data acquisition, but is designed as a complete field controller for autonomous CRNS instruments.
2.3.1. Electronics Design
Its digital core is based on an ATSAM3X8E microcontroller, i.e. a 32-bit ARM Cortex-M3 running with 3.3 V logic in combination with a dedicated ATmega16U2 for USB communication. The controller interfaces the detector frontend electronics, manages auxiliary sensors and communication to peripherals as well as subsequently responsible for data acquisition and transfer.
The logger board features the following components: A DS3231(SN) temperature-stabilized real-time clock with a backup battery. Non-volatile SPI memory is provided by an FRAM and for removable mass storage SD cards can be used. The board furthermore includes a Bosch BME280 sensor for local measurements of pressure, temperature and relative humidity. Communication interfaces are implemented for both local sensors and telemetry. The main peripheral interface is realized by a half-duplex RS-485 transceiver, optionally an I2C connection is provided and for external environmental sensors the logger has an SDI-12 interface.
An onboard Simcom SIM7600 (4G) modem provides cellular communication and GNSS functionality. Alternatively, a Quectel BC95-G (NB-IoT) in combination with an UBlox M[6-9]N GPS module can be configured.
For autonomous field operation, the logger additionally integrates a solar charger for photovoltaic input with battery-backup output.
2.3.2. Logger Functionality
The logger serves as the central control, acquisition, and communication unit of the measurement system. During each acquisition cycle, the logger collects neutron and slow-control data from the nCatcher frontend, supplements the data stream then with local or external sensor feeds, timestamps the data and stores or transmits the resulting records.
In addition to raw data from the neutron detector and environmental sensor information, the logger acquires diagnostic parameters such as high voltage, threshold settings, temperature, humidity, and general status information. A number of external SDI-12 sensors can be configured, these may include meteorological, such as ATMOS14/41 (METER Group), or atmospheric like LI-710 (LI-COR Environmental) and in-situ soil sensors such as SMT-100 (Truebner GmbH) or HygroVUE5, SoilVUE10, TEROS-12 and CS616 (Campbell Scientific) as well as PR2 profile probe (Delta T Devices) and Drill & Drop (Sentek). For sensor references and calibration see [67,68,69,70,71,72,73]. Remote communication can be realised by modems with either UDP, FTP, HTTP POST, MQTT, or optionally LoRa, depending on hardware and firmware configuration.
Figure 4.
Schematic of the current data logger components and input/output logic.

2.3.3. Telemetry and Data Integration
The telemetry framework implemented into the logger is designed for data transmission from the sensor to remote storage systems, either through cellular or local LoRa networks, supporting various protocols such as FTP, MQTT, or UDP for maximizing compatibility with different network infrastructures. Once transmitted, the records are stored into a time-series database, such as InfluxDB, where the data is further processed. This allows for seamless integration with data visualization and analysis tools to facilitate accessing the information through dedicated (API) interfaces or dashboards like Grafana for real-time visualization of time-series and statistical interpretation of soil moisture dynamics, see also Figure 5.
2.4. Instrument Pool
The stationary Stx instrument family comprises several modular CRNS systems that address different requirements in terms of detector size and temporal resolution, see also Figure 6.
The S1 is a slim detector configuration intended primarily for long-term agricultural monitoring at a resolution of around 10 h. The SP presents itself as a larger installation with improved counting statistics and thus better suitability for hourly averages, challenging environments [17,19]. The intermediate S2 and S2+ systems provide a compromise between installation size, time resolution and cost. All these systems are based on helium-3-free boron-converter proportional counters with Ar:CO2 counting gas and combine one or several detector tube, the same nCatcher readout electronics, logger and autonomous PV/battery supply in a modular outdoor platform [19,64]. Depending on the measurement context different external SDI-12 sensors are adopted. These systems have been installed both in application-oriented agricultural projects such as ADAPTER and in larger scientific monitoring networks [17,64]. In addition, the S2L system with a lithium-foil multi-wire proportional chamber [43] achieves around 3800 cph. All count rates are stated for sea level, 10% soil moisture and average German latitude. In comparison, under the same conditions the Hydroinnova CRS1000 [6] yields around 900 cph.
2.5. Field Deployment
The handling of the Stx instruments is designed for straightforward and autonomous field deployment. For the installation typically a mechanical insertion of a ground screw into the soil is chosen, which for usual soils can be drilled in by hand. Once the base is positioned, the main detector unit is mounted and aligned, see Figure 7. Then, the subsystems are connected to the foldout logger unit: photovoltaic supply, the neutron detector and environmental sensors. Data acquisition parameters and other parameters are managed via a configuration file on the SD card. Upon powering the system, the integrated display allows for directly checking the proper instrument operation, such as current count rates, the high-voltage status and telemetry signal quality.
2.6. Applications and Data Management
The integration of CRNS technology into environmental monitoring networks has significantly advanced hydrological monitoring with the current installations COSMOS [6], COSMOS-UK [16], CosmOz Australia [15], ADAPTER [17] and smaller-scaled networks in India [76], Germany [64] and Ireland [77]. Due to the comparably large footprint, CRNS data can serve as a validation tool of remote sensing products [78,79,80]. Soil moisture data is especially valuable for drought monitoring [81] and early warning systems [82], for the calculation of specialized indices such as the Standardized Precipitation Evapotranspiration Index (SPEI) or the Palmer Drought Severity Index (PDSI) [83]. In agricultural management, accurate information on soil water content allows for the optimization of irrigation practices and water use efficiency [74,84,85]. Furthermore, long-term monitoring [86] supports hydrological research into water flow dynamics, infiltration rates and groundwater recharge, as well as the assessment of climate change impacts on ecosystem resilience [8]. The system integration involves automated data collection by instruments at predefined intervals and subsequent transmission via cellular, LoRa or satellite networks. Data storage, quality control and analysis are performed on cloud platforms.
3. Results
3.1. Thermal Stability of Signal Discrimination
The stability of the nCatcher electronics was evaluated for the S1 system over a period of several years, see Section 3.3, with temperature range from −10 °C to +55 °C.
In a linear multivariate regression analysis, the pulse length exhibited a drift coefficient of −0.02 units/°C. Given the typical signal range of 100 to 350 units, a 30 °C temperature shift results in a variation of less than units (). Similarly, the pulse height drift was quantified at 0.046 units/°C. These measured drifts are an order of magnitude smaller than the characteristic width of the neutron ’banana’ region in the PL-PH space. Hence, the analysis of the pulse length and pulse height confirms good thermal stability.
3.2. Power Consumption and Energy Efficiency
Energy efficiency of the system is a critical factor for long-term autarcic operation, not only for dimensioning PV panel and battery, but it also determines whether an instrument can be deployed in challenging environments like forests. The power consumption varies between operational states and could be reduced within each generation. The newer generation (S1p) runs in combination with the optimized nCatcher 4.0 electronics with the nAccelerator high voltage module, which consumes only 2 mA at 12 V. In contrast, the previous S1 system, with the nCatcher 3.x and a CAEN A7508P high-voltage module, requires approximately 8 mA. The total power consumption, see Table 2, refers to a complete setup without external SDI-12 sensors. An SD card is included in the budget, current draws can vary slightly between models though.
For more complex configurations, such as the S2+ (triple analog stage) or the S2L (lithium-based detector), the power requirements increase accordingly. The S2L has a CAEN A7502P module, which adds approximately 4 mA of quiescent current and requires higher output power for its multi-wire proportional chamber, resulting in a total increase of roughly 6 mA compared to the base configuration. Hence, even the more complex Stx system configurations are well within a power budget of less than 0.5 W and the most recent S1p achieves a significant reduction in consumption with the instrument reaching nearly 50 mW.
3.3. Long-Term Operation
We show an exemplary timeseries of a CRNS instrument deployed within an urban environment. Around 40 % of the surface is covered by infrastructure. Located at a former military base most soils had been excavated and back- or refilled. This anthropogenic sediment therefore provides a base with laterally rather homogeneous conditions and average densities of around 1.48 g/cm3, yet with a very high hydraulic conductivity. The challenge in such an environment for in that case the smallest sensor is to resolve the rather fast hydrological response with a significant signal damping. The result, see Figure 8, under these circumstances is a time series which is consistent with the expected behaviour of a stationary CRNS deployed in a heterogeneous urban footprint.
After correction for incoming neutron intensity, atmospheric pressure and air humidity, the neutron signal shows a comparatively smooth temporal evolution, with emphasized links to precipitation-driven wetting and subsequent drying phases. The comparatively low noise level of the corrected neutron data, despite count rates of roughly 700–1000 cph, also indicates that the expected precision for a stationary CRNS, after temporal aggregation, can be achieved. The CRNS soil moisture evaluation reproduces the main seasonal and precipitation-wise soil-moisture dynamics seen by the weighted SMT reference, see also [9,87], but with reduced amplitude. After applying the urban areal correction, see Appendix A, the CRNS-derived soil moisture shows a stronger wetting and drying response and agrees more closely with the weighted in situ reference, which is consistent with the theoretical expectation that sealed surfaces contribute a comparatively invariant neutron background and therefore damp the apparent soil-moisture dynamics of the hydrologically active fraction. As the in-situ SMT-100 sensors [88] do not cover the full support volume an exact overlap is not to be expected. Particularly distinct during the winter period is the appearance of snow: here, the derived CRNS moisture signal rises strongly as a distinct water layer forms ontop of the soil. For the interpretation of snow water equivalent by CRNS we refer to [89,90,91,92,93]. The timeseries demonstrates that the corrected CRNS-derived soil moisture enables the precise measurement of the field-scale dynamics with good temporal resolution.
4. Outlook
4.1. Roving
By mounting a detector on a vehicle the measured area can be extended from several hectares to the square-kilometer scale.
With stationary CRNS being optimized for monitoring within a fixed footprint, mobile applications are carried out to resolve spatial heterogeneities or along regional transects. This technique, commonly referred to as roving, uses the same detection principles as stationary probes but with much larger detectors to maximize the count rate and hence minimize acquisition time. Yet, data typically needs to be corrected for the ’road effect’ [23] or changing soil texture along the track. Roving provides a scalable solution for characterizing soil moisture from the field scale up to mesoscale assessments of entire catchments and basins. This approach has been applied in a variety of environmental contexts [35,36,37,38,94,95,96]. An illustrative example of the spatial coverage achieved during a representative roving campaign of 2 h is presented in Figure 9.
4.2. Monolithic Instrument Architecture: The S1p System
The latest evolution of the S1 series, the new S1p, introduces a major overhaul by transitioning from a modular assembly to a fully monolithic instrument architecture, see Figure 10. Conventional CRNS setups typically rely on a distributed configuration, consisting of a separate logger and battery enclosure connected via external cabling to a detector on a pole. The S1p integrates all main components into a single cylindrical enclosure. The main development of this design is the S1p ’penthouse’ unit. This integrated head houses the new logger, the telemetry modules and the battery as an extension of the detector housing. The solar panel and the environmental sensors (pressure, temperature and humidity) are mounted directly on top of the instrument cap. This design shift removes the need for external cables or mounting solutions. Consequently, the S1p can be deployed as a single unit on a ground screw, which reduces installation time and effort and as a more holistic solution presents itself as a more sleek and cost-effective solution for long-term agricultural and hydrological monitoring.
5. Conclusions
We presented the Stx instrument family as a scalable, cost-effective and helium-3-free solution for Cosmic-Ray Neutron Sensing. The modular architecture relies on boron-10-lined proportional counters with dedicated frontend electronics, data logging and telemetry. The pulse shape analysis provides reliable discrimination of neutron events from gamma-ray background and electronic noise, which is a necessity because of the continuous energy spectrum characteristic of boron-10-lined detectors. Main results are the complete overhaul in electronics and system design. We achieved a significant gain in efficiency with close to 50 mW total system power with the latest S1p generation. This represents a roughly fivefold improvement over the previous S1 generation. With the transition to the monolithic S1p architecture and complementary roving applications, the Stx platform is well positioned to support the continued expansion of CRNS monitoring networks in hydrology, precision agriculture and climate-resilient land management.
Author Contributions
M.K. and J.W. have equally contributed to all parts of the manuscript.
Funding
The presented solutions were developed within several projects and partially funded by the DFG (German Research Foundation) research unit FOR 2694 Cosmic Sense via the project 357874777.
Data Availability Statement
Data and designs available on request from the authors. Further information can be obtained from the following project URLs: nCatcher repository: https://gitlab.com/mkoehli/ncatcher, Data logger repository: https://gitlab.com/mkoehli/arduinologger.
Acknowledgments
M.K and J.W. acknowledge Weingut Politschek and Honeycamp Development GmbH for providing sites used in this publication. M.K. acknowledges Elli Groner and Avshalom Babad.
Appendix A. Areal Correction Procedure
For the urban test campaign in Mannheim, Germany, the CRNS sensor was installed at the site ’Honeycamp’ from 04/2021 onwards. Approximately 40 % of the surrounding area was classified as sealed surface with roads, paved yards and building-related infrastructure, based on the land-cover delineation shown in Figure A1. The signal-contribution correction of [97,98] was applied to account for the damping of the neutron signal by these hydrologically mostly invariant areas. It combines the radial sensitivity of the detector with the intensity-moisture relation to estimate the relative contribution of different surface classes to the measured count rate. The sealed fraction was treated as an approximately invariant background with effective soil moisture contributions according to the materials in [99] (and updated in [100]) - for example 10 % for concrete and 30 % for asphalt. Only the unsealed fraction was assumed to carry soil moisture dynamics. Conceptually integrated in [101], the measured neutron counts were rescaled by the signal contribution of the hydrologically active area in order to eliminate the effect of dynamical range reduction of the sealed urban surroundings and to obtain a signal more representative of the topsoil within the footprint.
Figure A1.
Soil moisture correction procedure for the sensor location in Mannheim, Germany (49°30’52.95"N, 8°33’6.45"E). (Left) Google Earth bird’s eye view of the site in 2022 with the inner circle amounting to 63% and the outer circle to 86% of the signal with GIS representation of the same area (middle) and (right) converted sealed-area map.
Figure A1.
Soil moisture correction procedure for the sensor location in Mannheim, Germany (49°30’52.95"N, 8°33’6.45"E). (Left) Google Earth bird’s eye view of the site in 2022 with the inner circle amounting to 63% and the outer circle to 86% of the signal with GIS representation of the same area (middle) and (right) converted sealed-area map.

References
- Koster, R.D.; Dirmeyer, P.A.; Guo, Z.; Bonan, G.; Chan, E.; Cox, P.; Gordon, C.T.; Kanae, S.; Kowalczyk, E.; Lawrence, D.; et al. Regions of Strong Coupling Between Soil Moisture and Precipitation. Science 2004, 305, 1138–1140. [Google Scholar] [CrossRef]
- Vereecken, H.; Kasteel, R.; Vanderborght, J.; Harter, J. Upscaling Hydraulic Properties and Soil Water Flow Processes in Heterogeneous Soils: A Review. Vadose Zone Journal 2007, 6, 1–28. [Google Scholar] [CrossRef]
- Seneviratne, S.I.; Corti, T.; Davin, E.L.; Hirschi, M.; Jaeger, E.B.; Lehner, I.; Orlowsky, B.; Teuling, A.J. Investigating soil moisture-climate interactions in a changing climate: A review. Earth-Science Reviews 2010, 99, 125–161. [Google Scholar] [CrossRef]
- Zreda, M.; Desilets, D.; Ferré, T.; Scott, R. Measuring soil moisture content non-invasively at intermediate spatial scale using cosmic-ray neutrons. Geophysical Research Letters 2008, 35, L21402. [Google Scholar] [CrossRef]
- Desilets, D.; Zreda, M.; Ferré, T. Nature’s neutron probe: Land surface hydrology at an elusive scale with cosmic rays. Water Resources Research 2010, 46, W11505. [Google Scholar] [CrossRef]
- Zreda, M.; Shuttleworth, W.; Zeng, X.; Zweck, C.; Desilets, D.; Franz, T.; Rosolem, R. COSMOS: The COsmic-ray Soil Moisture Observing System. Hydrology and Earth System Sciences 2012, 16, 4079–4099. [Google Scholar] [CrossRef]
- Köhli, M. Soil moisture measurements by Cosmic-Ray Neutron Sensing: A critical review. Geoderma 2026, 465, 117626. [Google Scholar] [CrossRef]
- Bogena, H.R.; Huisman, J.A.; Güntner, A.; Hübner, C.; Kusche, J.; Jonard, F.; Vey, S.; Vereecken, H. Emerging methods for noninvasive sensing of soil moisture dynamics from field to catchment scale: a review. WIREs Water 2015, 2, 635–647. [Google Scholar] [CrossRef]
- Schrön, M.; Köhli, M.; Scheiffele, L.; Iwema, J.; Bogena, H.; Lv, L.; Martini, E.; Baroni, G.; Rosolem, R.; Weimar, J.; et al. Improving Calibration and Validation of Cosmic-Ray Neutron Sensors in the Light of Spatial Sensitivity. Hydrology and Earth System Sciences 2017, 21, 5009–5030. [Google Scholar] [CrossRef]
- Loew, A.; Bell, W.; Brocca, L.; Bulgin, C.E.; Burdanowitz, J.; Calbet, X.; Donner, R.V.; Ghent, D.; Gruber, A.; Kaminski, T.; et al. Validation practices for satellite-based Earth observation data across communities. Reviews of Geophysics 2017, 55, 779–817. [Google Scholar] [CrossRef]
- Peng, J.; Albergel, C.; Balenzano, A.; Brocca, L.; Cartus, O.; Cosh, M.H.; Crow, W.T.; Dabrowska-Zielinska, K.; Dadson, S.; Davidson, M.W.; et al. A roadmap for high-resolution satellite soil moisture applications - confronting product characteristics with user requirements. Remote Sensing of Environment 2021, 252, 112162. [Google Scholar] [CrossRef]
- Li, Z.L.; Leng, P.; Zhou, C.; Chen, K.S.; Zhou, F.C.; Shang, G.F. Soil moisture retrieval from remote sensing measurements: Current knowledge and directions for the future. Earth-Science Reviews 2021, 218, 103673. [Google Scholar] [CrossRef]
- Köhli, M.; Schrön, M.; Zreda, M.; Schmidt, U.; Dietrich, P.; Zacharias, S. Footprint characteristics revised for field-scale soil moisture monitoring with cosmic-ray neutrons. Water Resources Research 2015, 51, 5772–5790. [Google Scholar] [CrossRef]
- Bogena, H.; Schrön, M.; Jakobi, J.; Ney, P.; Zacharias, S.; Andreasen, M.; Baatz, R.; Boorman, D.; Duygu, M.; Eguibar-Galán, M.; et al. COSMOS-Europe: a European network of cosmic-ray neutron soil moisture sensors. Earth System Science Data 2022, 14, 1125–1151. [Google Scholar] [CrossRef]
- Hawdon, A.; McJannet, D.; Wallace, J. Calibration and correction procedures for cosmic-ray neutron soil moisture probes located across Australia. Water Resources Research 2014, 50, 5029–5043. [Google Scholar] [CrossRef]
- Evans, J.G.; Ward, H.C.; Blake, J.R.; Hewitt, E.J.; Morrison, R.; Fry, M.; Ball, L.A.; Doughty, L.C.; Libre, J.W.; Hitt, O.E.; et al. Soil water content in southern England derived from a cosmic-ray soil moisture observing system - COSMOS-UK. Hydrological Processes 2016, 30, 4987–4999. [Google Scholar] [CrossRef]
- Ney, P.; Köhli, M.; Bogena, H.; Goergen, K. CRNS-based monitoring technologies for a weather and climate-resilient agriculture: realization by the ADAPTER project. In Proceedings of the 2021 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor); IEEE, 2021; pp. 203–208. [Google Scholar] [CrossRef]
- Jakobi, J.; Huisman, J.A.; Vereecken, H.; Diekkrüger, B.; Bogena, H.R. Cosmic Ray Neutron Sensing for Simultaneous Soil Water Content and Biomass Quantification in Drought Conditions. Water Resources Research 2018, 54, 7383–7402. [Google Scholar] [CrossRef]
- Weimar, J.; Köhli, M.; Budach, C.; Schmidt, U. Large-Scale Boron-Lined Neutron Detection Systems as a 3He Alternative for Cosmic Ray Neutron Sensing. Frontiers in Water 2020, 2, 16. [Google Scholar] [CrossRef]
- Heidbüchel, I.; Güntner, A.; Blume, T. Use of cosmic-ray neutron sensors for soil moisture monitoring in forests. Hydrology and Earth System Sciences 2016, 20, 1269–1288. [Google Scholar] [CrossRef]
- Brogi, C.; Jakobi, J.; Huisman, J.; Schmidt, M.; Montzka, C.; Bates, J.; Akter, S.; Bogena, H. Cosmic-ray neutron sensors provide scale-appropriate soil water content and vegetation observations for eddy covariance stations in agricultural ecosystems. Agricultural and Forest Meteorology 2025, 373, 110731. [Google Scholar] [CrossRef]
- Al-Mashharawi, S.K.; Steele-Dunne, S.C.; El Hajj, M.M.; López Valencia, O.M.; López Camargo, O.A.; Pouget, G.; Doussan, C.; Courault, D.; McCabe, M.F. Exploring the use of thermal neutron counts to track orchard phenological development. Frontiers in Water 2026, 8. [Google Scholar] [CrossRef]
- Schrön, M.; Rosolem, R.; Köhli, M.; Piussi, L.; Schröter, I.; Iwema, J.; Kögler, S.; Oswald, S.; Wollschläger, U.; Samaniego, L.; et al. Cosmic-ray Neutron Rover Surveys of Field Soil Moisture and the Influence of Roads. Water Resources Research 2018, 54, 6441–6459. [Google Scholar] [CrossRef]
- Köhli, M.; Schrön, M.; Schmidt, U. Response functions for detectors in cosmic ray neutron sensing. Nuclear Instruments and Methods in Physics Research Section A: Accelerators, Spectrometers, Detectors and Associated Equipment 2018, 902, 184–189. [Google Scholar] [CrossRef]
- Piscitelli, F.; Mauri, G.; Laloni, A.; Hall-Wilton, R. Verification of He-3 proportional counters’ fast neutron sensitivity through a comparison with He-4 detectors: He-3 and He-4 proportional counters’ fast neutron sensitivity and evaluation of the cosmic neutron fluxes at ESS. The European Physical Journal Plus 2020, 135. [Google Scholar] [CrossRef]
- Millán-Callado, M.Á.; Méndez Villafañe, R.; Adam, B.A.S.; Blahušiak, P.; Di Chicco, A.; Dietz, M.; Köhli, M.; Lutz, B.; Reginatto, M.; Vykydal, Z.; et al. Response characterization of Cosmic-Ray Neutron Sensors in neutron metrology reference fields. EGUsphere 2025, 1–22. [Google Scholar] [CrossRef]
- Shea, D.; Morgan, D. The Helium-3 Shortage: Supply, Demand, and Options for Congress. CRS Report for Congress 2010, R41419. [Google Scholar]
- Kouzes, R.; Lintereur, A.; Siciliano, E. Progress in alternative neutron detection to address the helium-3 shortage. Nuclear Instruments and Methods in Physics Research Section A: Accelerators, Spectrometers, Detectors and Associated Equipment 2015, 784, 172–175, Symposium on Radiation Measurements and Applications 2014 (SORMA XV). [Google Scholar] [CrossRef]
- Lintereur, A.T.; Ely, J.H.; Kouzes, R.T.; Siciliano, E.R.; Swinhoe, M.T.; Woodring, M.L. Alternatives to Helium-3 for neutron multiplicity counters. In Proceedings of the 2012 IEEE Nuclear Science Symposium and Medical Imaging Conference Record (NSS/MIC); IEEE, 2012; pp. 547–553. [Google Scholar] [CrossRef]
- Francke, T.; Heistermann, M.; Köhli, M.; Budach, C.; Schrön, M.; Oswald, S. Assessing the feasibility of a directional cosmic-ray neutron sensing sensor for estimating soil moisture. Geoscientific Instrumentation, Methods and Data Systems 2022, 11, 75–92. [Google Scholar] [CrossRef]
- Badiee, A.; Wallbank, J.; Pulido Fentanes, J.; Trill, E.; Scarlet, P.; Zhu, Y.; Cielniak, G.; Cooper, H.; Blake, J.; Evans, J.; et al. Using Additional Moderator to Control the Footprint of a COSMOS Rover for Soil Moisture Measurement. Water Resources Research 2021, 57, e2020WR028478. [Google Scholar] [CrossRef]
- D’Mellow, B.; Thomas, D.J.; Joyce, M.J.; Kolkowski, P.; Roberts, N.J.; Monk, S.D. The replacement of cadmium as a thermal neutron filter. Nuclear Instruments and Methods in Physics Research Section A: Accelerators, Spectrometers, Detectors and Associated Equipment 2007, 577, 690–695. [Google Scholar] [CrossRef]
- Andreasen, M.; Jensen, K.; Desilets, D.; Franz, T.; Zreda, M.; Bogena, H.; Looms, M. Status and Perspectives on the Cosmic-Ray Neutron Method for Soil Moisture Estimation and Other Environmental Science Applications. Vadose Zone Journal 2017, 16, 1–11. [Google Scholar] [CrossRef]
- Dong, J.; Ochsner, T.; Zreda, M.; Cosh, M.; Zou, C. Calibration and Validation of the COSMOS Rover for Surface Soil Moisture Measurement. Vadose Zone Journal 2014, 13. [Google Scholar] [CrossRef]
- Vather, T.; Everson, C.; Franz, T.E. Calibration and Validation of the Cosmic Ray Neutron Rover for Soil Water Mapping within Two South African Land Classes. Hydrology 2019, 6, 65. [Google Scholar] [CrossRef]
- Jakobi, J.; Huisman, J.A.; Schrön, M.; Fiedler, J.; Brogi, C.; Vereecken, H.; Bogena, H.R. Error Estimation for Soil Moisture Measurements With Cosmic Ray Neutron Sensing and Implications for Rover Surveys. Frontiers in Water 2020, 2. [Google Scholar] [CrossRef]
- Wu, S.; Zhang, Y.; Kang, W.; Zhao, W. Mesoscale soil moisture survey by mobile cosmic-ray neutron sensor across various landscapes in the Heihe River Basin. Research in Cold and Arid Regions 2023, 15, 211–218. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, S.; Zhao, W.; Xiao, J. Mesoscale soil moisture measurements along the rover route using the mobile cosmic-ray neutron sensing in the eastern Tibetan Plateau. Geoderma 2024, 450, 117046. [Google Scholar] [CrossRef]
- Segrè, E.; Wiegand, C. Boron Trifluoride Neutron Detector for Low Neutron Intensities. Review of Scientific Instruments 1947, 18, 86–89. [Google Scholar] [CrossRef]
- Yamashita, M.; Stephens, L.; Smith, A.; Patterson, H. Detection Efficiency of Bare and Moderated BF3-Gas-Filled Proportional Counters for Isotropic Neutron Fluxes. Journal of Nuclear Science and Technology 1966, 3, 343–353. [Google Scholar] [CrossRef]
- Kowalski, T. Analytical approach and calculation of gas gain in Ar-CO2 mixture. Journal of Instrumentation 2020, 15, P07008–P07008. [Google Scholar] [CrossRef]
- Mashao, D.C.; Alton, T.L.; Binnersley, C.L.; Bradnam, S.C.; Croft, S.; Joyce, M.J.; Packer, L.W.; Turner, T.; Wild, J.A.; Aspinall, M.D. Boron-coated straw detector efficiency comparison with 3He proportional counters - A prospect for cosmic ray neutron monitoring. International Journal of Modern Physics E 2025, 34, 2545004. [Google Scholar] [CrossRef]
- Forsyth, A.; Teal, T.; Inglis, A. Silverside neutron detector performance. In Proceedings of the 2017 IEEE International Symposium on Technologies for Homeland Security (HST), 4 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Patrignani, A.; Ochsner, T.; Montag, B.; Bellinger, S. A Novel Lithium Foil Cosmic-Ray Neutron Detector for Measuring Field-Scale Soil Moisture. Frontiers in Water 2021, 3. [Google Scholar] [CrossRef]
- Flynn, K.D.; Wyatt, B.M.; McInnes, K.J. Novel Cosmic Ray Neutron Sensor Accurately Captures Field-Scale Soil Moisture Trends under Heterogeneous Soil Textures. Water 2021, 13, 3038. [Google Scholar] [CrossRef]
- Debicki, Z.; Jedrzejczak, K.; Karczmarczyk, J.; Kasztelan, M.; Lewandowski, R.; Orzechowski, J.; Szabelska, B.; Szabelski, J.; Tokarski, P.; Wibig, T. Helium counters for low neutron flux measurements. Astrophysics and Space Sciences Transactions 2011, 7, 511–514. [Google Scholar] [CrossRef]
- Köhli, M.; Weimar, J.; Schmidt, S.; Schmidt, F.P.; Lambertz, A.; Weber, L.; Kaminski, J.; Schmidt, U. Arduino-Based Readout Electronics for Nuclear and Particle Physics. Sensors 2024, 24, 2935. [Google Scholar] [CrossRef]
- Osovizky, A.; Pritchard, K.; Ziegler, J.; Binkley, E.; Yehuda-Zada, Y.; Tsai, P.; Thompson, A.; Cooksey, C.; Siebein, K.; Hadad, N.; et al. 6LiF:ZnS(Ag) Mixture Optimization for a Highly Efficient Ultrathin Cold Neutron Detector. IEEE Transactions on Nuclear Science 2018, 65, 1025–1032. [Google Scholar] [CrossRef]
- Stowell, P.; Fargher, S.; Steer, C.; Thompson, L. Scintillating thermal neutron detectors for cosmic ray soil moisture monitoring. Journal of Instrumentation 2021, 16, P11039. [Google Scholar] [CrossRef]
- Gianessi, S.; Polo, M.; Stevanato, L.; Lunardon, M.; Ahmed, H.S.; Weltin, G.; Toloza, A.; Budach, C.; Biro, P.; Francke, T.; et al. Assessment of a new non-invasive soil moisture sensor based on cosmic-ray neutrons. In Proceedings of the 2021 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor); IEEE, 2021; pp. 290–294. [Google Scholar] [CrossRef]
- Gianessi, S.; Polo, M.; Stevanato, L.; Lunardon, M.; Francke, T.; Oswald, S.E.; Said Ahmed, H.; Toloza, A.; Weltin, G.; Dercon, G.; et al. Testing a novel sensor design to jointly measure cosmic-ray neutrons, muons and gamma rays for non-invasive soil moisture estimation. Geoscientific Instrumentation, Methods and Data Systems 2024, 13, 9–25. [Google Scholar] [CrossRef]
- Rahman, N.A.A.; Lombigit, L.; Abdullah, N.A.; Azman, A.; Dolah, T.; Muzakkir, A.; Jaafar, Z.; Mohamad, G.H.P.; Ramli, A.A.M.; Zain, R.M.; et al. Arduino based radiation survey meter. In Proceedings of the AIP Conference Proceedings; AIP Publishing LLC, 2016. [Google Scholar] [CrossRef]
- Axani, S.; Frankiewicz, K.; Conrad, J. The CosmicWatch Desktop Muon Detector: a self-contained, pocket sized particle detector. Journal of Instrumentation 2018, 13, P03019. [Google Scholar] [CrossRef]
- Lee, J.; Lee, M.; Jang, M.; Lim, J.M. Comparison of Arduino Nano and Due processors for time-based data acquisition for low-cost mobile radiation detection system. Journal of Instrumentation 2022, 17, P03015. [Google Scholar] [CrossRef]
- Bocci, V.; Ali, B.; Chiodi, G.; Kubler, D.; Iacoangeli, F.; Masi, L.; Recchia, L. Cosmo ArduSiPM: An All-in-One Scintillation-Based Particle Detector for Earth and Space Application. Sensors 2024, 24, 3836. [Google Scholar] [CrossRef]
- Fersch, B.; Francke, T.; Heistermann, M.; Schrön, M.; Döpper, V.; Jakobi, J.; Baroni, G.; Blume, T.; Bogena, H.R.; Budach, C.; et al. A dense network of cosmic-ray neutron sensors for soil moisture observation in a pre-alpine headwater catchment in Germany. Earth System Science Data Discussions 2020, 2020, 1–35. [Google Scholar] [CrossRef]
- Li, T.; Jeřábek, J.; Noreika, N.; Dostál, T.; Zumr, D. An overview of hydrometeorological datasets from a small agricultural catchment (Nučice) in the Czech Republic. Hydrological Processes 2021, 35. [Google Scholar] [CrossRef]
- Brogi, C.; Pisinaras, V.; Köhli, M.; Dombrowski, O.; Hendricks-Franssen, H.J.; Babakos, K.; Chatzi, A.; Panagopoulos, A.; Bogena, H.R. Monitoring irrigation in small orchards with cosmic-ray neutron sensors. Sensors 2023, 23, 2378. [Google Scholar] [CrossRef]
- Heistermann, M.; Francke, T.; Schrön, M.; Oswald, S.E. Technical Note: Revisiting the general calibration of cosmic-ray neutron sensors to estimate soil water content. Hydrology and Earth System Sciences 2024, 28, 989–1000. [Google Scholar] [CrossRef]
- Fäth, J.; Kneisel, C. Multi-method soil moisture monitoring at two temperate forest stands in Germany. Discover Applied Sciences 2024, 6, 573. [Google Scholar] [CrossRef]
- Grosse, P.M.; Marret, E.; Scheiffele, L.; Dimitrova Petrova, K.; Francke, T.; Altdorff, D.; Heistermann, M.; Schiel, M.; Neumann, C.; Scheffler, D.; et al. The Potsdam Soil Moisture Observatory: high-coverage reference observations at kilometer scale. Earth System Science Data 2026, 18, 1703–1727. [Google Scholar] [CrossRef]
- Brogi, C.; Nieberding, F.; Scheiffele, L.; Daccache, A.; Schrön, M.; Bogena, H.R. Irrigation Monitoring With Cosmic-Ray Neutron Sensors: Unraveling Field Experiments With Neutron Transport Simulations. Water Resources Research 2026, 62. [Google Scholar] [CrossRef]
- Altdorff, D.; Oswald, S.E.; Zacharias, S.; Zengerle, C.; Dietrich, P.; Mollenhauer, H.; Attinger, S.; Schrön, M. Toward Large-Scale Soil Moisture Monitoring Using Rail-Based Cosmic Ray Neutron Sensing. Water Resources Research 2023, 59. [Google Scholar] [CrossRef]
- Heistermann, M.; Altdorff, D.; Francke, T.; Schrön, M.; Grosse, P.M.; Markert, A.; Bauriegel, A.; Biró, P.; Attinger, S.; Beyrich, F.; et al. Soil moisture monitoring with cosmogenic neutrons: an asset for the development and assessment of soil moisture products in the state of Brandenburg (Germany). Natural Hazards and Earth System Sciences 2026, 26, 465–486. [Google Scholar] [CrossRef]
- Jawad, H.; Nordin, R.; Gharghan, S.; Jawad, A.; Ismail, M. Energy-Efficient Wireless Sensor Networks for Precision Agriculture: A Review. Sensors 2017, 17, 1781. [Google Scholar] [CrossRef]
- Rajasekaran, T.; Anandamurugan, S. Challenges and Applications of Wireless Sensor Networks in Smart Farming - A Survey. In Advances in Big Data and Cloud Computing; Springer Singapore, 2018; pp. 353–361. [Google Scholar] [CrossRef]
- Bogena, H.R.; Huisman, J.A.; Schilling, B.; Weuthen, A.; Vereecken, H. Effective calibration of low-cost soil water content sensors. Sensors 2017, 17, 208. [Google Scholar] [CrossRef]
- Ramirez-Cuesta, J.M.; Sánchez, J.M.; Piqueras, J.G.; Montoya, F.; Pueyo, I.B.; Intrigliolo, D.S.; Lopez-Urrea, R. Reliability of Turbulent Fluxes Measurements Provided by a Novel Sensor on a Pistachio Orchard. In Proceedings of the 2024 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor).; IEEE, 2024; pp. 107–111. [Google Scholar] [CrossRef]
- Mozumder, R.S.; Debnath, R.; Rahman, F.; Ahmed, A.A.; Bin Alam, M.J. Field Validation of a Low-Cost IoT-Based System for Real-Time Monitoring of Hydrologic and Physical Behavior of Slope. In Proceedings of the 2026 International Conference on Computing, Networking and Communications (ICNC). IEEE, 2026; pp. 309–315. [Google Scholar] [CrossRef]
- Cominelli, S.; Rivera, L.D.; Brown, W.G.; Ochsner, T.E.; Patrignani, A. Calibration of TEROS 10 and TEROS 12 electromagnetic soil moisture sensors. Soil Science Society of America Journal 2024, 88, 2104–2122. [Google Scholar] [CrossRef]
- Wilson, T.B.; Kochendorfer, J.; Diamond, H.J.; Meyers, T.P.; Hall, M.; French, B.; Myles, L.; Saylor, R.D. A field evaluation of the SoilVUE10 soil moisture sensor. Vadose Zone Journal 2023, 22, e20241. [Google Scholar] [CrossRef]
- Francesca, V.; Osvaldo, F.; Stefano, P.; Paola, R.P. Soil Moisture Measurements: Comparison of Instrumentation Performances. Journal of Irrigation and Drainage Engineering 2010, 136, 81–89. [Google Scholar] [CrossRef]
- Dhakal, M.; West, C.P.; Deb, S.K.; Kharel, G.; Ritchie, G.L. Field Calibration of PR2 Capacitance Probe in Pullman Clay-Loam Soil of Southern High Plains. Agrosystems, Geosciences and Environment 2019, 2, 1–7. [Google Scholar] [CrossRef]
- Brogi, C.; Bogena, H.; Köhli, M.; Huisman, J.; Hendricks-Franssen, H.J.; Dombrowski, O. Feasibility of irrigation monitoring with cosmic-ray neutron sensors. Geoscientific Instrumentation, Methods and Data Systems 2022, 11, 451–469. [Google Scholar] [CrossRef]
- Wang, K.; Ma, L.; Yang, C.; Bian, Z.; Zhang, D.; Cui, S.; Wang, M.; Chen, Z.; Li, X. Recent Progress in Gd-Containing Materials for Neutron Shielding Applications: A Review. Materials 2023, 16, 4305. [Google Scholar] [CrossRef] [PubMed]
- Montzka, C.; Bogena, H.; Zreda, M.; Monerris, A.; Morrison, R.; Muddu, S.; Vereecken, H. Validation of spaceborne and modelled surface soil moisture products with cosmic-ray neutron probes. Remote Sensing 2017, 9, 103. [Google Scholar] [CrossRef]
- Daly, E.; Finkele, K.; Hochstrasser, T.; Jarmain, C.; Richards, K.; Fenton, O.; Murphy, P.N.; Cummins, T.; Saunders, M.; Johnston, P.M.; et al. The Irish Soil Moisture Observation Network - ISMON. In Proceedings of the Irish National Hydrology Conference 2021: Proceedings; Office of Public Works: Ireland, 2021; pp. 1–11. [Google Scholar]
- Schmidt, T.; Schrön, M.; Li, Z.; Francke, T.; Zacharias, S.; Hildebrandt, A.; Peng, J. Comprehensive quality assessment of satellite- and model-based soil moisture products against the COSMOS network in Germany. Remote Sensing of Environment 2024, 301, 113930. [Google Scholar] [CrossRef]
- Zheng, Y.; Coxon, G.; Woods, R.; Power, D.; Rico-Ramirez, M.A.; McJannet, D.; Rosolem, R.; Li, J.; Feng, P. Evaluation of reanalysis soil moisture products using cosmic ray neutron sensor observations across the globe. Hydrology and Earth System Sciences 2024, 28, 1999–2022. [Google Scholar] [CrossRef]
- Jeong, J.; Lee, S.; Cho, S.; Kim, K.; Choi, M. Multi-scale assessment of a cosmic-ray neutron probe observation of soil moisture for surface layer applications in a mountainous forest environment. Agricultural and Forest Meteorology 2024, 356, 110155. [Google Scholar] [CrossRef]
- Zink, M.; Samaniego, L.; Kumar, R.; Thober, S.; Mai, J.; Schäfer, D.; Marx, A. The German drought monitor. Environmental Research Letters 2016, 11, 074002. [Google Scholar] [CrossRef]
- Luong, T.T.; Pöschmann, J.; Kronenberg, R.; Bernhofer, C. Rainfall Threshold for Flash Flood Warning Based on Model Output of Soil Moisture: Case Study Wernersbach, Germany. Water 2021, 13, 1061. [Google Scholar] [CrossRef]
- Vicente-Serrano, S.M.; Begueria, S.; López-Moreno, J.I. A Multiscalar Drought Index Sensitive to Global Warming: The Standardized Precipitation Evapotranspiration Index. Journal of Climate 2010, 23, 1696–1718. [Google Scholar] [CrossRef]
- Franz, T.; Wahbi, A.; Vreugdenhil, M.; Weltin, G.; Heng, L.; Oismueller, M.; Strauss, P.; Dercon, G.; Desilets, D. Using Cosmic-Ray Neutron Probes to Monitor Landscape Scale Soil Water Content in Mixed Land Use Agricultural Systems. Applied and Environmental Soil Science 2016. [Google Scholar] [CrossRef]
- Li, D.; Schrön, M.; Köhli, M.; Bogena, H.R.; Weimar, J.; Jiménez Bello, M.; Han, X.; Martínez Gimeno, M.; Zacharias, S.; Vereecken, H.; et al. Can Drip Irrigation be Scheduled with Cosmic-Ray Neutron Sensing? Vadose Zone Journal 2019, 18, 190053. [Google Scholar] [CrossRef]
- Dorigo, W.; Himmelbauer, I.; Aberer, D.; Schremmer, L.; Petrakovic, I.; Zappa, L.; Preimesberger, W.; Xaver, A.; Annor, F.; Ardö, J.; et al. The International Soil Moisture Network: serving Earth system science for over a decade. Hydrology and Earth System Sciences 2021, 25, 5749–5804. [Google Scholar] [CrossRef]
- Wang, X.; Liu, R.; Köhli, M.; Marach, J.; Wang, Z. Monitoring Soil Water Content and Measurement Depth of Cosmic-Ray Neutron Sensing in the Tibetan Plateau. Journal of Hydrometeorology 2025, 26, 155–167. [Google Scholar] [CrossRef]
- Nieberding, F.; Huisman, J.A.; Huebner, C.; Schilling, B.; Weuthen, A.; Bogena, H.R. Evaluation of Three Soil Moisture Profile Sensors Using Laboratory and Field Experiments. Sensors 2023, 23, 6581. [Google Scholar] [CrossRef]
- Zweck, C.; Zreda, M.; Desilets, D. Snow shielding factors for cosmogenic nuclide dating inferred from Monte Carlo neutron transport simulations. Earth and Planetary Science Letters 2013, 379, 64–71. [Google Scholar] [CrossRef]
- Schattan, P.; Köhli, M.; Schrön, M.; Baroni, G.; Oswald, S. Sensing Area-Average Snow Water Equivalent with Cosmic-Ray Neutrons: The Influence of Fractional Snow Cover. Water Resources Research 2019, 55, 10796–10812. [Google Scholar] [CrossRef]
- Gugerli, R.; Salzmann, N.; Huss, M.; Desilets, D. Continuous and autonomous snow water equivalent measurements by a cosmic ray sensor on an alpine glacier. The Cryosphere 2019, 13, 3413–3434. [Google Scholar] [CrossRef]
- Bogena, H.R.; Herrmann, F.; Jakobi, J.; Brogi, C.; Ilias, A.; Huisman, J.A.; Panagopoulos, A.; Pisinaras, V. Monitoring of Snowpack Dynamics With Cosmic-Ray Neutron Probes: A Comparison of Four Conversion Methods. Frontiers in Water 2020, 2. [Google Scholar] [CrossRef]
- Kim, H.; Sproles, E.; Tuttle, S.E. Influence of snow spatial variability on cosmic ray neutron snow water equivalent (SWE): case study in a northern prairie. The Cryosphere 2025, 19, 3177–3191. [Google Scholar] [CrossRef]
- Chrisman, B.; Zreda, M. Quantifying mesoscale soil moisture with the cosmic-ray rover. Hydrology and Earth System Sciences 2013, 17, 5097–5108. [Google Scholar] [CrossRef]
- Avery, W.A.; Finkenbiner, C.; Franz, T.E.; Wang, T.; Nguy-Robertson, A.L.; Suyker, A.; Arkebauer, T.; Muñoz Arriola, F. Incorporation of globally available datasets into the roving cosmic-ray neutron probe method for estimating field-scale soil water content. Hydrology and Earth System Sciences 2016, 20, 3859–3872. [Google Scholar] [CrossRef]
- Gaspar, L.; Franz, T.E.; Navas, A. Cosmic-Ray Neutron Sensor Backpack for Assessing Spatial and Temporal Variations in Soil Water Content in an Agroforestry System in Northern Spain. Land 2025, 14, 744. [Google Scholar] [CrossRef]
- Schrön, M.; Zacharias, S.; Womack, G.; Köhli, M.; Desilets, D.; Oswald, S.E.; Bumberger, J.; Mollenhauer, H.; Kögler, S.; Remmler, P.; et al. Intercomparison of cosmic-ray neutron sensors and water balance monitoring in an urban environment. Geoscientific Instrumentation, Methods and Data Systems 2018, 7, 83–99. [Google Scholar] [CrossRef]
- Schrön, M.; Köhli, M.; Zacharias, S. Signal contribution of distant areas to cosmic-ray neutron sensors - implications for footprint and sensitivity. Hydrology and Earth System Sciences 2023, 27, 723–738. [Google Scholar] [CrossRef]
- Köhli, M.; Schrön, M.; Zacharias, S.; Schmidt, U. URANOS v1.0 - the Ultra Rapid Adaptable Neutron-Only Simulation for Environmental Research. Geoscientific Model Development 2023, 16, 449–477. [Google Scholar] [CrossRef]
- Köhli, M.; Schrön, M.; Zacharias, S.; Schmidt, U. URANOS - a novel voxel engine Neutron Transport Monte-Carlo Simulation. Journal of Physics: Conference Series 2025, 3130, 012017. [Google Scholar] [CrossRef]
- Schrön, M. CORNish PASDy - COsmic-ray neutron flavored PASDy. 2025. Available online: https://git.ufz.de/CRNS/cornish_pasdy (accessed on 16 October 2025).
Figure 1.
(Left) Footprint of the CRNS method independent of instrument type [13] and (right) soil moisture dependent accuracy for different systems and different acquisition intervals, for corresponding count rates see Section 2.4.
Figure 1.
(Left) Footprint of the CRNS method independent of instrument type [13] and (right) soil moisture dependent accuracy for different systems and different acquisition intervals, for corresponding count rates see Section 2.4.

Figure 2.
Current version of the frontend electronics module nCatcher (left, single channel configuration) and S1p data logger (middle and right). The nCatcher board layout follows from top to bottom the subsections within 2.1 with analog and digital parts strictly separated. The high voltage module is on the backside. The data logger board layout is more compressed with power components in the top segment, infrastructure and microcontroller in the middle and telemetry and interfaces in the bottom part.
Figure 2.
Current version of the frontend electronics module nCatcher (left, single channel configuration) and S1p data logger (middle and right). The nCatcher board layout follows from top to bottom the subsections within 2.1 with analog and digital parts strictly separated. The high voltage module is on the backside. The data logger board layout is more compressed with power components in the top segment, infrastructure and microcontroller in the middle and telemetry and interfaces in the bottom part.

Figure 3.
Pulse length vs. pulse height plot (both arbitrary units) over approximately one year. All events between the dashed lines are considered neutron events. All outside are noise or other particles. The inlet shows the pulse height spectrum alone.
Figure 3.
Pulse length vs. pulse height plot (both arbitrary units) over approximately one year. All events between the dashed lines are considered neutron events. All outside are noise or other particles. The inlet shows the pulse height spectrum alone.

Figure 5.
Example of a frontend realization based on Grafana of a sensor inside a vineyard near Gundelsheim (49°17’15"N, 9°10’20"E), Germany, with temperature and humidity values of air and detector casing, readings of locally installed in-situ probes and evaluated CRNS moisture product.
Figure 5.
Example of a frontend realization based on Grafana of a sensor inside a vineyard near Gundelsheim (49°17’15"N, 9°10’20"E), Germany, with temperature and humidity values of air and detector casing, readings of locally installed in-situ probes and evaluated CRNS moisture product.

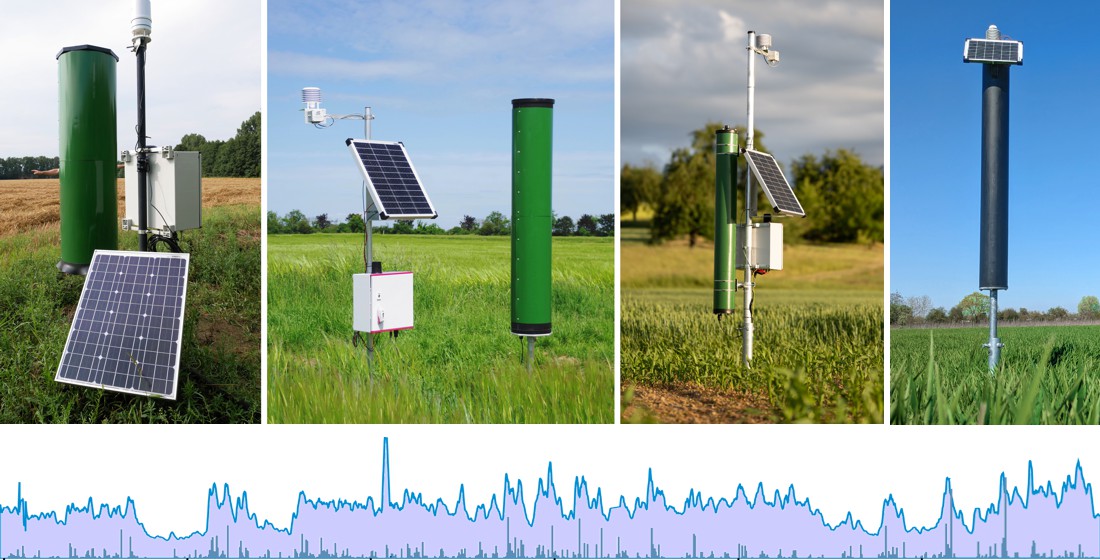
Figure 6.
Current instrument pool and historical developments: (Left) System SP ’Schwarze Puppen’ from 2021 with 1900–4800 cph, (middle) S2 from 2023 with 1800–2400 cph and (right) S1 in single-pole configuration with around 1000 cph. The detectors are equipped with gadolinium-based thermal neutron shields [19,74,75] (green mantle).
Figure 6.
Current instrument pool and historical developments: (Left) System SP ’Schwarze Puppen’ from 2021 with 1900–4800 cph, (middle) S2 from 2023 with 1800–2400 cph and (right) S1 in single-pole configuration with around 1000 cph. The detectors are equipped with gadolinium-based thermal neutron shields [19,74,75] (green mantle).

Figure 7.
Installation of an S1 system: ground screw base (left), SD card configuration (top) and fully set up system (right). The logger shows on its display status information (from left to right and top to bottom): environmental parameters and count rate, GPS data, system clock, battery power, cellular connectivity, detector health and histograms with historical data like temperature, pulse height spectrum and neutron count rate with their respective minimum and maximum values.
Figure 7.
Installation of an S1 system: ground screw base (left), SD card configuration (top) and fully set up system (right). The logger shows on its display status information (from left to right and top to bottom): environmental parameters and count rate, GPS data, system clock, battery power, cellular connectivity, detector health and histograms with historical data like temperature, pulse height spectrum and neutron count rate with their respective minimum and maximum values.

Figure 8.
Example of a CRNS time series from 2023 to 2026 in an urban area (49°30’52.95"N, 8°33’6.45"E). The upper panel shows neutron count rates raw and after the standard CRNS corrections (corr) for incoming neutron intensity, atmospheric pressure and air humidity. The middle panel displays the corresponding correction factors. The lower panel compares the resulting CRNS soil-moisture product with the area-corrected CRNS estimate for the hydrologically active, unsealed part of the footprint, and with in situ probes at 5, 15, and 25 cm depth. The purple line shows the depth-weighted SMT reference. A 72 h running mean is applied to all (hourly) data. Daily precipitation is shown as blue bars.
Figure 8.
Example of a CRNS time series from 2023 to 2026 in an urban area (49°30’52.95"N, 8°33’6.45"E). The upper panel shows neutron count rates raw and after the standard CRNS corrections (corr) for incoming neutron intensity, atmospheric pressure and air humidity. The middle panel displays the corresponding correction factors. The lower panel compares the resulting CRNS soil-moisture product with the area-corrected CRNS estimate for the hydrologically active, unsealed part of the footprint, and with in situ probes at 5, 15, and 25 cm depth. The purple line shows the depth-weighted SMT reference. A 72 h running mean is applied to all (hourly) data. Daily precipitation is shown as blue bars.

Figure 9.
Example of a CRNS roving campaign in the Sayeret Shaked Park in Israel (31°16’20.2"N, 34°39’13.3"E). (Left) Google Earth bird’s eye view of the site in 2015, (middle) evaluated CRNS soil moisture along the track and (right) converted and extrapolated map. The color code spans a soil moisture range of 2 % to 22 %.
Figure 9.
Example of a CRNS roving campaign in the Sayeret Shaked Park in Israel (31°16’20.2"N, 34°39’13.3"E). (Left) Google Earth bird’s eye view of the site in 2015, (middle) evaluated CRNS soil moisture along the track and (right) converted and extrapolated map. The color code spans a soil moisture range of 2 % to 22 %.

Figure 10.
The new S1p instrument in monolithtic design deployed in an agricultural context. The environmental sensors for temperature, pressure and relative humidity are mounted in combination with the GSM and GPS antenna ontop of the sensor with the upper part housing the data logger and frontend electronics. With its higher efficiency a smaller PV panel can be used.
Figure 10.
The new S1p instrument in monolithtic design deployed in an agricultural context. The environmental sensors for temperature, pressure and relative humidity are mounted in combination with the GSM and GPS antenna ontop of the sensor with the upper part housing the data logger and frontend electronics. With its higher efficiency a smaller PV panel can be used.

Table 2.
Current consumption of the previous system S1 and the newly developed S1p at 12 V input.
| System | Operational State | Current [mA] | Power [mW] |
| S1 | Boot-up / Initialization | 48 | 576 |
| Active (Standard) | 36 | 432 | |
| Modem transmission | 80–120 | 960–1440 | |
| Low Power Mode (Modem off) | 10 | 120 | |
| Total System | 22 | 264 | |
| S1p | Boot-up / Initialization | 45 | 540 |
| Active (Modem off) | 34 | 408 | |
| Active (Modem on/idle) | 40 | 480 | |
| Modem transmission (FTP) | 70–110 | 840–1320 | |
| Low Power Mode (Modem off) | 2.5 | 30 | |
| Total System | 4.5 | 54 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



