Submitted:
18 February 2026
Posted:
27 February 2026
You are already at the latest version
Abstract
Work on multi-scale organization and audit-based directionality lacks a minimal-substrate theorem: key primitives are often realized only by smuggling in external schedules, ad hoc audits, or declared quotients, making results hard to verify and compare across substrates. We introduce a no-smuggling minimal-substrate semantics for SPT, operationalize it via matched-control audit tests on finite stochastic machines, and demonstrate separations between protocol artifacts, intrinsic drive, and route-dependent packaging defects. Operationally, we define a canonical machine class \( \mathcal S_{\min} \) of autonomous finite stochastic dynamics with phase-in-state, deterministic lenses, induced packaging endomaps \( E_{\tau,f} \), and intrinsic audits (path-reversal KL asymmetry \( \Sigma_T \) and ACC affinities), and we implement exact computations together with a reproducible witness suite and a Lean-checked idempotent/closure backbone for packaging equivalence and saturation (de Moura and Ullrich 2021; The mathlib Community 2020). Under calibrated controls, stroboscopic protocols can exhibit \( \Sigma_T>0 \) while their autonomous lifts yield \( \Sigma_T\approx 0 \) (protocol trap), whereas turning on internal phase drive produces a clean null-vs-driven separation with \( \Sigma_T(Z)>0 \) and a detectable projected macro arrow; moreover deterministic coarse-graining never increases \( \Sigma_T \) and can erase it entirely, and packaging along refinement routes exhibits a prototype-driven holonomy defect that is large at moderate timescales while a uniform baseline is near zero and satisfies a gain-plus-mismatch bound. These results supply a machine semantics and separation witnesses for a minimal substrate theorem, reducing false positives and turning SPT from a language into a compilation target up to packaging equivalence. We are explicit that we do not establish a universal physical substrate or continuum limit: our conclusions are semantic and rest on exact finite-state audits and controlled constructions rather than empirical natural-system data.
Keywords:
1. Introduction
What is the weakest mathematical substrate on which all six primitives can be realized without smuggling them in?
1.1. From an Emergence Language to a Substrate Machine
1.2. No-Smuggling Semantics
External protocols masquerading as autonomy.
External directionality audits.
Externally declared quotients and objects.
1.3. Drive Restores Genuine Arrows
1.4. What This Paper Adds and How to Read It
- We define a no-smuggling realizability criterion and propose a canonical minimal machine substrate in which P1–P6 are implemented as internal operators and constraints.
- We state a representation/compilation perspective: admissible substrates simulate each other up to packaging equivalence by passage through the canonical machine model.
- We state minimality results showing that removing specific structural features forces at least one primitive to fail or to re-enter as an external oracle.
- We provide a reproducible witness suite (protocol trap, driven protocols, hidden irreversibility, refinement non-monotonicity, and route mismatch/holonomy).
2. From Six Birds to a Minimal Substrate Question
2.1. Six Primitives and the Separation of Certificates
2.2. Theory Packages: Lens, Completion, and Audit
2.3. Canonical Empirical Packaging via Dynamics and a Lens
2.4. Audits of Directionality: KL Arrow and ACC Drive
Path-reversal asymmetry and data processing.
ACC affinity classes (P6drive).
2.5. The Protocol Trap and Autonomy Discipline
2.6. What This Paper Adds
- We define a no-smuggling realizability criterion and propose a canonical minimal machine substrate (autonomous finite stochastic dynamics on an explicit extended state) in which P1–P6 are realized internally.
- We state a representation/compilation viewpoint: admissible substrates simulate each other up to packaging equivalence by passage through the canonical machine model.
- We state minimality results showing that removing specific substrate features forces at least one primitive to fail or to re-enter as an external oracle (smuggling).
- We provide a reproducible witness suite that sharpens the protocol trap into a minimality test and shows that internal drive (P6drive) restores genuine arrows in autonomous protocols.
3. Definitions: Substrates, Realizations, and No-Smuggling Semantics
3.1. Substrates and Realizations
3.2. No-Smuggling Semantics
3.3. Lenses, Refinement, and Definability
3.4. Packaging Endomaps and Packaging Equivalence
3.5. Packaging-Respecting Maps and “Up to Packaging” Comparison
3.6. Audits and Monotonicity Under Coarse-Graining
3.7. Where These Definitions Are Used
4. The Canonical Minimal Machine Substrate
4.1. Carrier and Dynamics
Extended state (phase/ledger).
4.2. Lenses and Refinement as Deterministic Maps
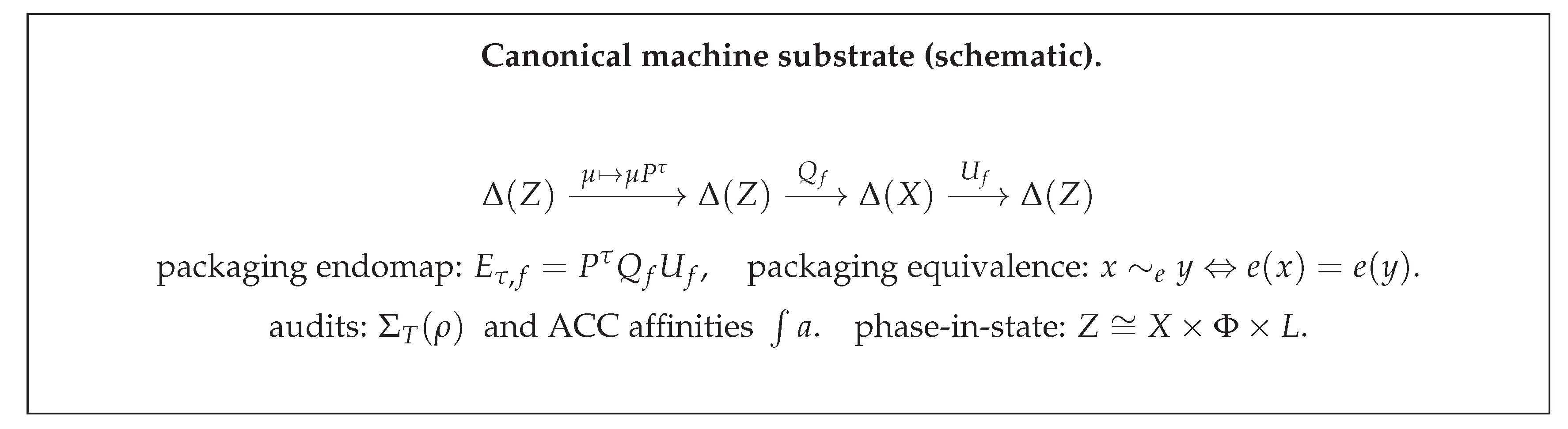
4.3. Internal Packaging as an Endomap
Pushforward (coarse-grain).
Lift (prototype reinjection).
Packaging equivalence.
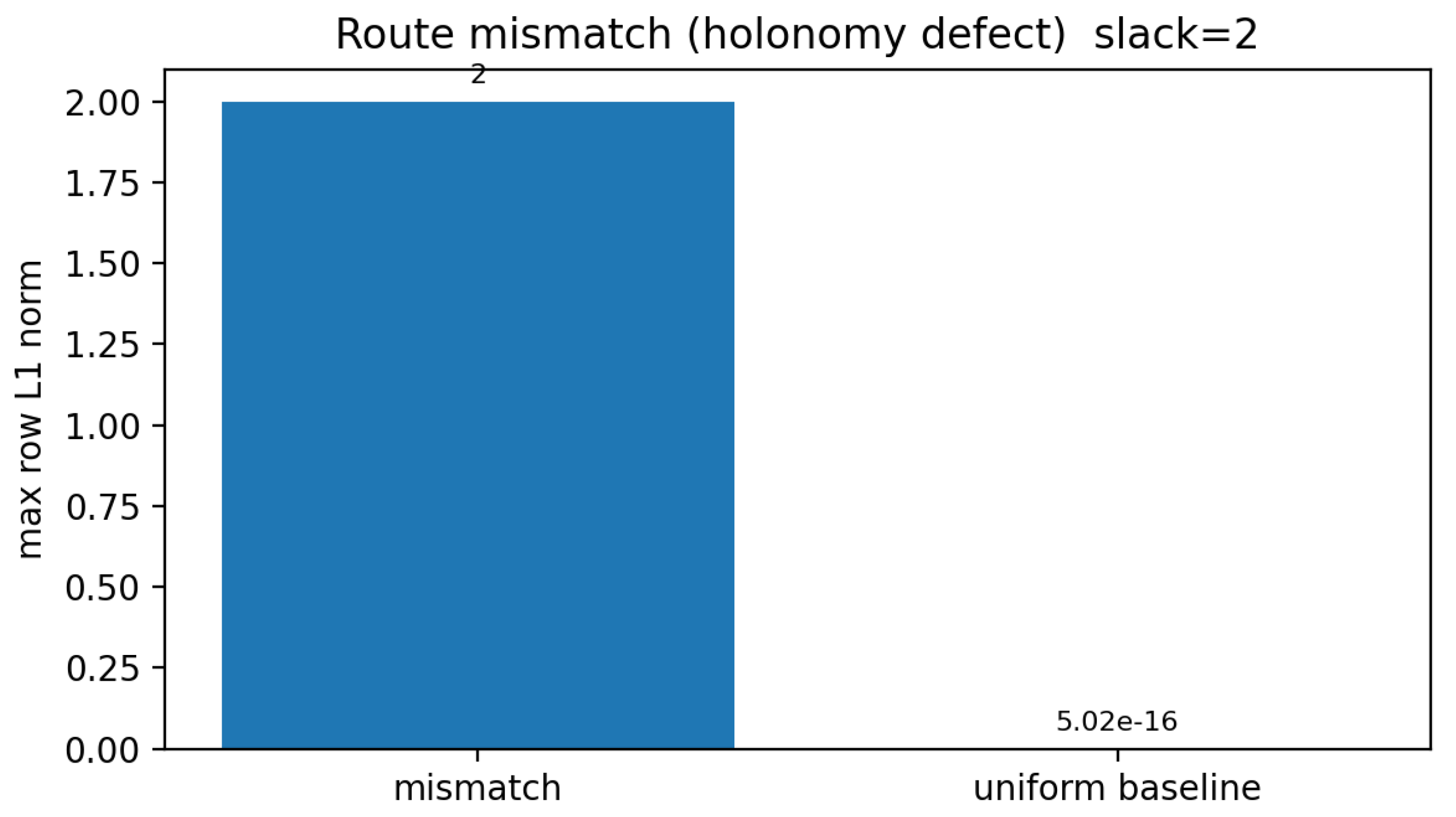
Route mismatch (holonomy defect).
4.4. Intrinsic Audits: KL Arrow and ACC Drive
Path-reversal asymmetry.
Exact macro path law for a deterministic lens.
ACC affinities (drive).
4.5. Where P1–P6 Live Inside the Canonical Machine
- P1 (dynamics/composition): realized by autonomous state evolution on Z via the time-homogeneous kernel P and composition by multiplication (, concatenation of stages by kernel products).
- P2 (limited access / interface): realized by deterministic lenses and the induced definability constraints (predicates constant on fibers).
- P3 (protocols / staged interaction): realized by explicit internal protocol state (phase-in-state) as a component of Z (e.g. ) so that staged protocols become autonomous dynamics on Z.
- P4 (staging/timescale): realized by the explicit timescale parameter and refinement chains of lenses that control which descriptions are admitted at which stage.
- P5 (packaging/objects): realized by the internal packaging endomap and its fixed-point/defect calculus (idempotence defect, retention error, prototype stability).
- P6 (audits of directionality/drive): realized by intrinsic audits induced by the autonomous dynamics (path-reversal KL asymmetry and ACC affinity classes), with monotonicity under coarse-graining as a semantic constraint.
4.6. A Schematic View
5. Main Theorems: The Minimal Substrate Package
5.1. The Canonical Minimal Substrate Class
5.2. Realizability on the Canonical Machine
5.3. Normal Form and Compilation Up to Packaging
- the lens/refinement structure of is simulated by deterministic lenses on ,
- packaging in is simulated by internal packaging endomaps on up to packaging equivalence, and
- admissible audits in are represented by intrinsic audits on (in particular, directionality audits respect monotonicity under coarse-graining).
5.4. Minimality: No-Smuggling Lower Bounds
- Autonomy requires phase-in-state (P3).If a substrate permits staged protocols but does not represent protocol state internally, then stroboscopic composition can produce apparent arrows of time that vanish once the dynamics is made autonomous by lifting state. Therefore, any autonomous semantics for protocols must encode phase-in-state (or an equivalent internal mechanism).
- Genuine arrows require internal drive (P6drive).Autonomy plus staging does not imply directionality. In an autonomous lifted model with reversible internal phase dynamics, protocol-induced arrows can disappear (). To obtain a genuine arrow in an autonomous substrate, one needs internal drive detectable by a nonzero affinity class (ACC cycle integrals).
- Audits must be monotone under coarse-graining (P6).There exist processes with real micro irreversibility but macro observations whose path law is reversal-invariant (). Any audit that reports increased directionality after coarse-graining violates limited-access semantics and is therefore smuggled.
- Packaging must be an internal (approximate) idempotent endomap (P5).Without an internal endomap e (or closure operator) that induces packaging equivalence , there is no internal notion of “same packaged object” and no internal fixed-point criterion for stability. Declaring macrostates by fiat is smuggling.
- Route mismatch is distinct from directionality (P3 vs. P6).Packaging along different refinement routes can yield a measurable holonomy defect (route mismatch), even when directionality audits obey data processing. Therefore, route mismatch must be treated as its own certificate family and cannot be conflated with an arrow audit.
6. Experimental Witness Suite (Separation Exhibits)
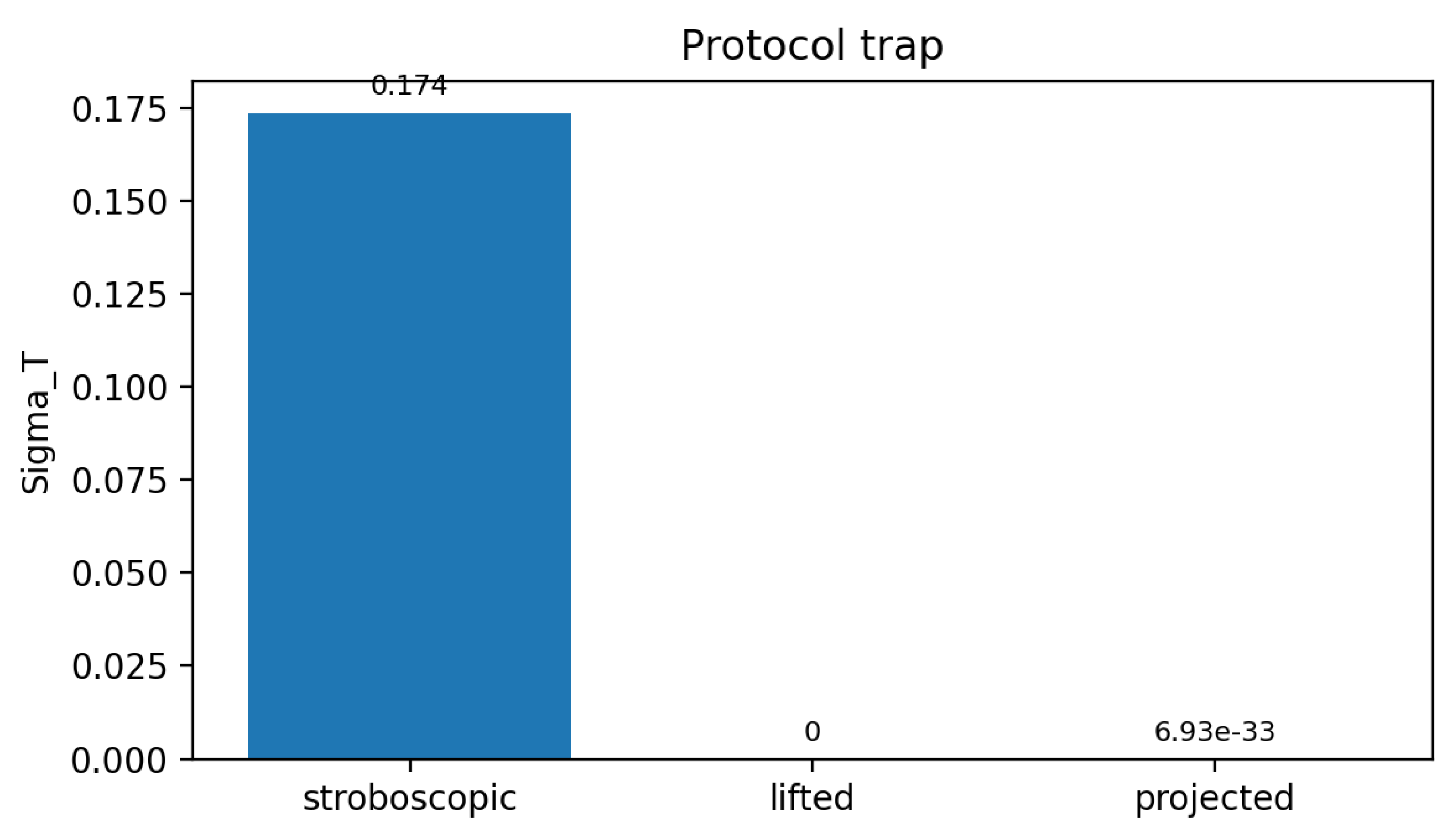
6.1. Protocol Trap: Stroboscopic Arrows Vanish Under Autonomy
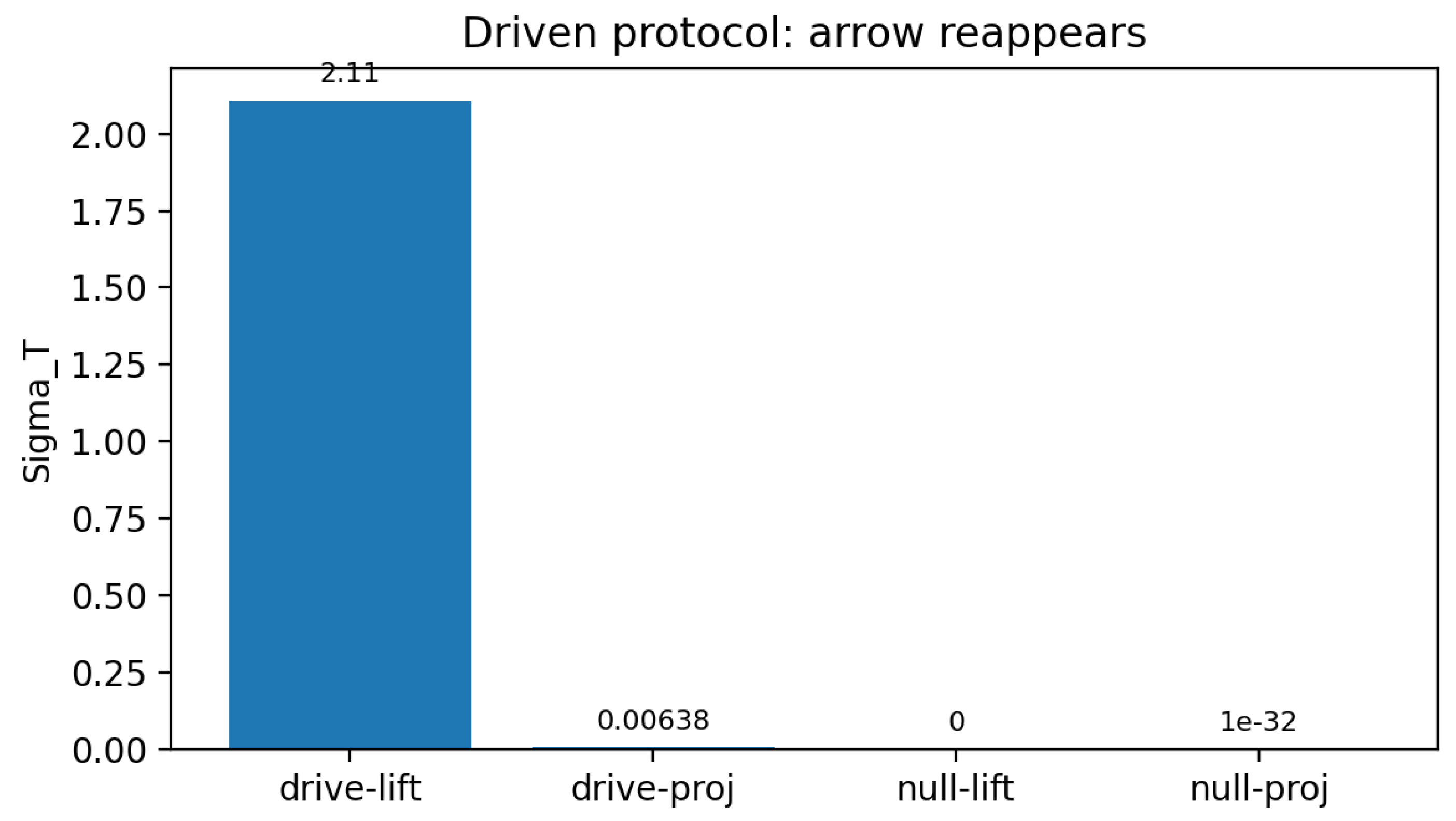
6.2. Driven Protocols: Internal Drive Restores Genuine Arrows
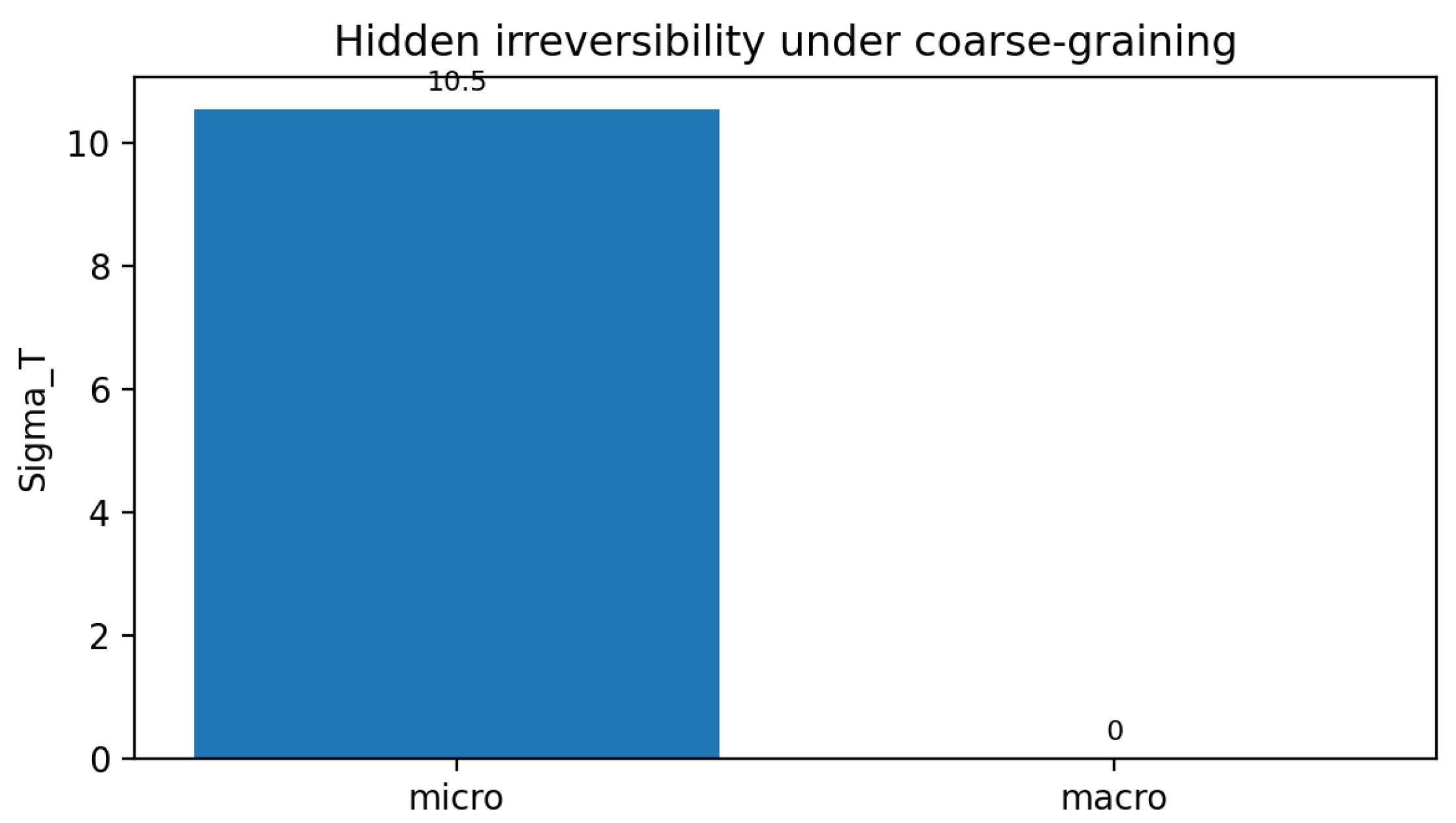
6.3. Hidden Irreversibility Under Coarse-Graining (DPI Witness)
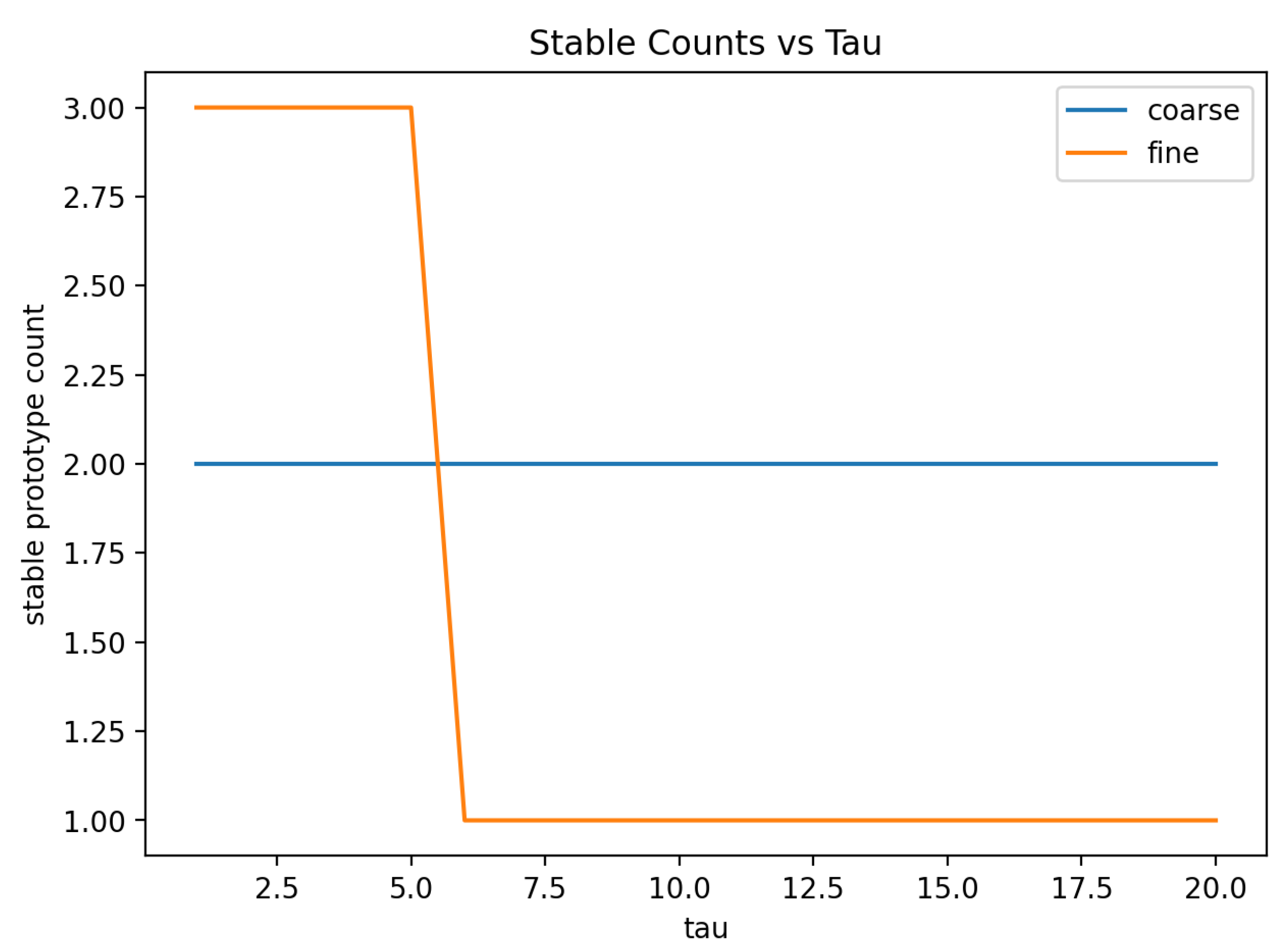
6.4. Refinement Can Help or Hurt: Packaging Stability vs. Timescale
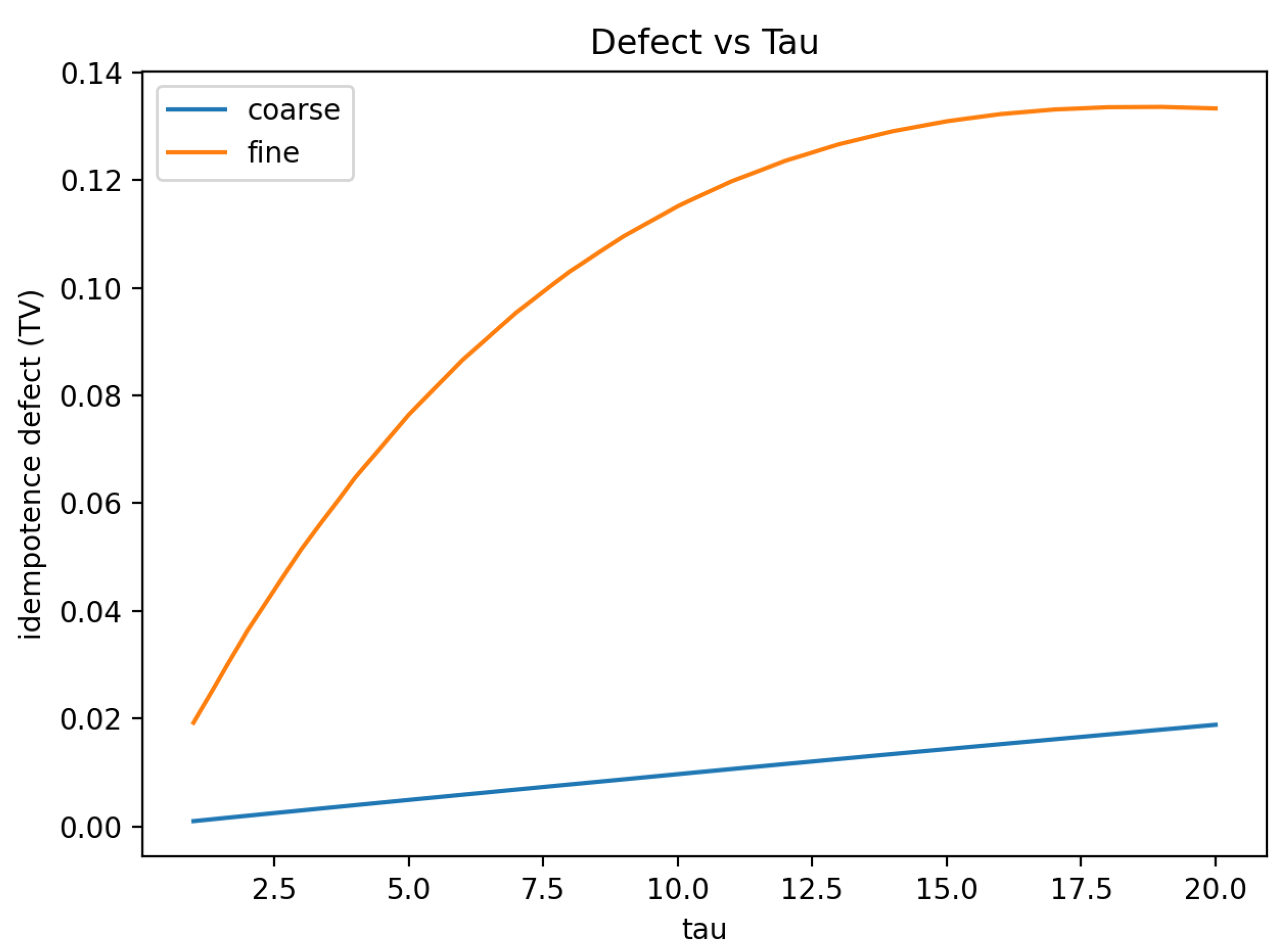
6.5. Route Mismatch (Holonomy Defect) and the Gain-Plus-Mismatch Bound
7. Discussion: Practical Workflow and Failure-Mode Safeguards
7.1. A Practical Audit Workflow (User-Facing)
- Make autonomy explicit. If the model uses staged protocols or time-varying rules, encode protocol state internally (phase-in-state) so that the resulting dynamics is autonomous on an extended carrier Z (Section 4).
- Choose lenses that represent actual access. Specify deterministic coarse-grainings that match what an observer/agent can actually read out; avoid conflating “what the simulator knows” with what is observable (Definition 4).
- Package at explicit timescales. For each , construct packaging endomaps and compute defect/stability diagnostics; compare coarse vs refined lenses across rather than assuming refinement is monotone beneficial (Definition 11,Figure 5).
- Audit directionality with controls. Evaluate (and, when appropriate, ACC affinities) in matched controls: (i) reversible/null controls to calibrate “artifact” levels, (ii) driven regimes to test for genuine internal drive, and (iii) micro vs macro audits to respect coarse-graining monotonicity (Figure 2,Figure 3, Figure 4).
- Treat route mismatch separately. If packaging is performed along refinement routes, quantify route mismatch as its own defect certificate; do not treat it as an arrow-of-time audit (Figure 7).
7.2. Threat Model: Common Failure Modes and What the Exhibits Test

| Certificate | Diagnostic / operator | Failure mode + witness |
|---|---|---|
| Directionality / arrow (P6) | on induced path laws (micro and macro) | Markov closure / external scheduling can create spurious arrows; enforcing autonomy (phase-in-state) removes them (protocol trap; fig:protocol-trap-sigmas). |
| Drive (P6drive) | ACC affinity (cycle integrals / exactness obstruction) | Autonomy plus protocols does not imply arrows; internal nonreversible drive cleanly separates from null controls (driven protocol; fig:protocol-drive-sigmas). |
| Limited-access soundness (P2/P6) | Audit monotonicity under lenses | Coarse-graining can hide real micro irreversibility; macro audits can be zero even when micro is positive (hidden irreversibility; fig:hidden-irreversibility). |
| Packaging / objects (P5) | ; idempotence defect and stability scores | Refinement can help or hurt depending on timescale; stability is not monotone in expressivity (refinement witness; fig:refinement-stable-counts). |
| Route mismatch (holonomy) | Representative/prototype choices can induce large route mismatch at moderate timescales even when uniform baselines are near zero (route mismatch; fig:route-mismatch). |
7.3. Scope and Limits
On novelty (P1/P2/P4).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A Implementation and Reproducibility Notes
Appendix A.1. Repository Layout (Relevant Paths)
- spt/core/markov.py: Markov utilities and exact computation of path-reversal asymmetry on micro path space.
- spt/core/lens.py: deterministic lenses, exact macro path probabilities, and exact macro ; includes DPI checks in tests.
- spt/core/packaging.py: empirical packaging operators , idempotence defect, retention error, and prototype stability scores.
- spt/core/acc.py: ACC-style antisymmetric 1-form, cycle basis integrals (affinities), and exactness residual diagnostics.
- experiments/runall.py: shared experiment runner.
- spt/utils/io.py: run directory creation and JSON artifact writing: config.json, metrics.json, and README.md.
- experiments/summarizeresults.py: produces docs/experiments/index.md and docs/experiments/metricssummary.json by scanning results/.
- paper/tools/extractmetrics.py: reads docs/experiments/metricssummary.json and writes paper/generated/metrics.tex (LaTeX macros for frozen numbers).
- paper/tools/makefigures.py: reads docs/experiments/metricssummary.json and writes committed figure PNGs under paper/figures/.
Appendix A.2. Running the Witness Suite
Appendix A.3. Freezing Numbers into LaTeX Macros
Appendix A.4. Freezing Figures
Appendix A.5. Building the PDF
Appendix B Lean Formalization: A Minimal Algebraic Backbone
Appendix B.1. Idempotent Splitting (Packaging as an Idempotent Endomap)
- Idempotent (e : α → α): the predicate .
- Fix e: the subtype of fixed points .
- inclusion i : Fix e → α and retraction r : α → Fix e (given idempotence).
- SPT.r_comp_i: on fixed points.
- SPT.i_comp_r: on the carrier.
Appendix B.2. Packaging Equivalence
- SPT.packEq_refl, SPT.packEq_symm, SPT.packEq_trans.
- SPT.packEq_to_package: given idempotence, x is equivalent to its packaged form .
- SPT.packEq_iff_packEq_apply: stability of packaging equivalence under applying e (useful for normal-form reasoning).
Appendix B.3. Lens Chains via Equivalence Relations and Saturation as Closure
- SPT.sat_mono: monotonicity of saturation.
- SPT.sat_idempotent and SPT.sat_idempotent_fn: idempotence (saturation is a closure operator component).
- SPT.sat_extensive: extensiveness .
- SPT.Refines and SPT.sat_refines: refinement implies saturation inclusion (“finer relation saturates less”).
Appendix B.4. Scope
References
- Cover, Thomas M.; Thomas, Joy A. Elements of Information Theory, 2 ed.; Wiley-Interscience, 2006. [Google Scholar]
- de Moura, Leonardo; Ullrich, Sebastian. The lean 4 theorem prover and programming language (system description). In Automated Deduction – CADE 28; Springer, 2021; Volume 12699, pp. 625–635. [Google Scholar] [CrossRef]
- Esposito, Massimiliano. Stochastic thermodynamics under coarse graining. Physical Review E 2012, 85(4), 041125. [Google Scholar] [CrossRef] [PubMed]
- Ioannis. Six birds: Foundations of emergence calculus. arXiv [cs.LO]. 2026, arXiv:2602.001341. [Google Scholar] [CrossRef]
- Kelly, Frank P. Reversibility and Stochastic Networks; Wiley, 1979. [Google Scholar]
- Kolmogoroff, A. Zur theorie der markoffschen ketten. Mathematische Annalen 112 1936, 155–160. [Google Scholar] [CrossRef]
- Kullback, Solomon; Leibler, Richard A. On information and sufficiency. The Annals of Mathematical Statistics 1951, 22(1), 79–86. [Google Scholar] [CrossRef]
- Lebowitz, Joel L.; Spohn, Herbert. A gallavotti–cohen-type symmetry in the large deviation functional for stochastic dynamics. Journal of Statistical Physics 1999, 95(1–2), 333–365. [Google Scholar] [CrossRef]
- Norris, J. R. Markov Chains; Cambridge University Press, 1997. [Google Scholar]
- Puglisi, Andrea; Pigolotti, Simone; Rondoni, Lamberto; Vulpiani, Angelo. Entropy production and coarse graining in markov processes. Journal of Statistical Mechanics: Theory and Experiment 2010, 2010(05), P05015. [Google Scholar] [CrossRef]
- Rabiner, Lawrence R. A tutorial on hidden markov models and selected applications in speech recognition. Proceedings of the IEEE 1989, 77(2), 257–286. [Google Scholar] [CrossRef]
- Schnakenberg, J. Network theory of microscopic and macroscopic behavior of master equation systems. Reviews of Modern Physics 1976, 48(4), 571–585. [Google Scholar] [CrossRef]
- Seifert, Udo. Stochastic thermodynamics, fluctuation theorems and molecular machines. Reports on Progress in Physics 2012, 75(12), 126001. [Google Scholar] [CrossRef] [PubMed]
- The mathlib Community. The lean mathematical library. In Proceedings of the 9th ACM SIGPLAN International Conference on Certified Programs and Proofs (CPP ’20), New York, NY, USA, 2020; Association for Computing Machinery; pp. 367–381. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



