
Submitted:
06 February 2026
Posted:
09 February 2026
You are already at the latest version
Abstract
Modern science explains how structures evolve once space, time, and dynamical laws are assumed. We ask a prior question: which geometric forms are admissible as the first coherent differentiations of a maximally symmetric (isotropic), undifferentiated state? The analysis is deliberately pre-dynamical and pre-physical: no temporal evolution, field equations, energetics, or mechanism are assumed.“Zero” is interpreted operationally as nondifferentiation (maximal isotropy), not emptiness and not a physically extant point. The sphere appears only as a symmetry object encoding “all directions are equivalent” once differentiation is contemplated. Coherence is a closure-compatibility constraint (standing-wave–like only in the sense of global consistency under closure).Under isotropy-preserving closure and minimality, continuous differentiation is disfavored and a finite set of extrema is forced. The smallest non-degenerate configuration requires four extrema; imposing single-scale maximal symmetry uniquely selects the regular tetrahedron (up to rotation). Minimal conjugate completion yields the star tetrahedron, and the cube/octahedron arise as induced envelopes. We record admissible extension pathways toward packing and Voronoi structure (preview only), deferring substrate selection to later work. The results are admissibility claims conditional on explicit postulates, not assertions of physical necessity.
Keywords:
isotropy
; coherence
; closure
; standing-wave closure
; tetrahedron
; dimensionality
1. Introduction
Modern science excels at describing how structures evolve once space, time, and physical laws are assumed. Far less attention has been given to a more elementary question: how can any structured reality arise at all, prior to the introduction of dynamics, fields, or even dimensional space? This paper addresses that question at the most minimal possible level.
Rather than proposing a new physical theory, cosmology, or dynamical mechanism, the present work investigates the admissibility of structure under the weakest conceivable assumptions. Specifically, we ask: given a maximally symmetric, undifferentiated background, what geometric forms—if any—are admissible as the first coherent differentiations? The emphasis is not on physical realization, but on logical and geometric constraint.
In the classical lineage of Pythagoras and Plato—and in the modern spirit of Weyl—we treat symmetry not as decoration but as a generative constraint: a principle capable of restricting admissible form before any dynamical account is supplied.[1,2,3,4]
A central motivation is that foundational notions such as point, dimension, and space are often treated as primitive or self-evident despite being operationally ambiguous. In particular, the mathematical point is indispensable in formal geometry, yet it has no extent, no internal structure, and no direct operational counterpart. When “zero dimension” is identified with a physically extant point, the result is a persistent conflation between representation and operational content.
We adopt a corrective operational perspective: zero means nondifferentiation (maximal isotropy), not emptiness and not a literal object. The familiar “0”-as-circle is treated as suggestive only, encoding directional equivalence in the plane; here the corresponding symmetry object for directions is the sphere. The emergence problem is then sharpened to: which differentiations of isotropy remain globally closure-compatible (coherent) without introducing arbitrary local inconsistency?
To address this, we introduce a pre-dynamical notion of coherent closure. The standing-wave analogy is used only as a guide to closure-compatibility: we do not assume temporal oscillation, a wave equation, energy minimization, or any physical boundary conditions. Coherence is understood as a global compatibility constraint: local distinctions must extend to a mutually consistent configuration across the entire isotropic domain.
Under such constraints, we show that continuous differentiation is not minimal: it requires additional structure to stabilize and introduces uncontrolled degrees of freedom. Discrete configurations of extrema, by contrast, can be fixed by symmetry and scale alone. We then identify the minimal discrete configurations capable of coherently differentiating a maximally isotropic background without collapsing into axial or planar degeneracy. This analysis forces non-coplanarity and selects the regular tetrahedron as the minimal admissible configuration.
The paper is intentionally pre-spatial, pre-temporal, and pre-dynamical. No physical laws, energy principles, or time evolution are assumed. The results are framed strictly as statements of geometric admissibility and minimality, not physical necessity. Their role is foundational: to clarify what forms are even possible before dynamics or mechanisms are introduced.
Contributions.
We make three concrete contributions.
- 1.
- We give an operational reinterpretation of “zero” as maximal isotropy (nondifferentiation) and fix the sphere as the canonical symmetry object for the space of directions (without presupposing physical space).
- 2.
- We formalize a pre-dynamical closure-compatibility constraint and show that minimal coherent differentiation forces discreteness; the smallest non-degenerate discrete-extrema configuration is the regular tetrahedron (unique up to rotation).
- 3.
- We record the minimal conjugate completion (star tetrahedron) and the induced polyhedral envelopes (cube and octahedron), and we delineate admissible extension pathways toward packing/Voronoi structure as preview only.
Roadmap.
Section 2 fixes the operational meaning of “zero” and motivates the sphere as a symmetry object for directions. Section 3 states the admissibility postulates (A1–A5) and formalizes closure-compatibility. Section 3.3 proves that the minimal non-degenerate discrete-extrema configuration is tetrahedral and that this step is intrinsically three-dimensional. Section 4 records the minimal conjugate completion and the induced cube/octahedron envelopes. Section 5 lists admissible extension pathways (preview only), followed by discussion and outlook.
Scope and non-claims.
This manuscript is intentionally pre-temporal and pre-dynamical. It makes no cosmological claims and assumes no laws, fields, energies, or operators. The terms “0D/1D/2D” are treated as bookkeeping abstractions; in this framework, operational dimensionality first becomes unavoidable at the tetrahedral stage.
1.1. Relation to Prior Foundational Programs
This manuscript is intentionally earlier in the logical stack than most physics-facing foundation programs. Operationally motivated approaches emphasize that primitives such as points and dimensions function primarily as representational anchors rather than directly measurable objects.[8] In a different direction, Wheeler’s “pregeometry” and subsequent discrete/combinatorial programs (e.g., Regge calculus, spin-network style constructions, and causal-set approaches) investigate how continuum spacetime might arise from more primitive relational or discrete structures.[9,10,11,12,13]
The present manuscript does not propose a discretization of spacetime, a quantum-gravity model, or a microphysical ontology. Instead, it isolates a single pre-dynamical admissibility step: under isotropy, closure-compatibility, and minimality (A1–A4), the smallest non-degenerate discrete-extrema configuration is tetrahedral (with conjugate completion inducing star-tetrahedral, cubic, and octahedral envelopes). The claim level is therefore deliberately restricted: “tetrahedron first” is an admissibility result conditional on explicit postulates, not a statement about which physical theory (if any) realizes those postulates or how continuum structure is dynamically generated.
Programmatic role.
This manuscript is the first part of a broader program. Later work will develop (i) an operational and mechanistic account of emergence, Emergent Mechanism Theory (EMT), and (ii) a spectral–geometric framework for dynamics and propagation on the resulting structures, Unified Harmonic Theory (UHT). None of those developments are required to assess the admissibility arguments presented here.
2. The Zero Point and Maximal Isotropy
Any attempt to understand emergence from first principles must confront the meaning of zero dimension. In both mathematics and physics, zero dimension is commonly associated with a point. While this identification is formally convenient, it is conceptually misleading when treated as an element of operational reality.
A mathematical point has no extent, no internal structure, and no relations. It cannot be measured, perturbed, or interacted with. As such, it does not represent a physically realizable object, but rather a limiting abstraction used to anchor coordinate systems and define idealized constructions. Treating points as physically meaningful entities conflates mathematical representation with operational content.
From an operational standpoint, the only invariant feature represented by a point is the absence of differentiation: no preferred direction, no preferred scale, no internal distinction. We therefore adopt the following interpretation.
Operational definition (Zero).“Zero” denotes nondifferentiation: a state of maximal isotropy in which no direction, scale, or internal relation is distinguished.
Maximal isotropy is not a statement about emptiness or non-existence. It is a symmetry statement: even in the absence of internal structure, isotropy can be characterized by the equivalence of all directions.
Once coordinate abstractions are stripped away, maximal isotropy admits a canonical symmetry representation: the space of directions. The set of directions relative to an undifferentiated reference is naturally represented by a sphere. Here the sphere is not introduced as a spatial surface embedded in a pre-existing three-dimensional space; it is a symmetry object encoding directional equivalence.
Remark (direction space is not physical space). The sphere used here is the space of orientations (directional degrees of freedom) associated with isotropy. Although it can be parameterized by two coordinates, this does not assert the prior existence of an extant 2D spatial manifold; it only provides a minimal symmetry representation for “all directions are equivalent.”
A brief note on language: we sometimes refer to the undifferentiated starting condition as the “zero point.” This does not imply a localized entity. It marks a limit of description: a state in which no differentiation is operationally meaningful. Geometry enters only when coherence and differentiation are introduced, at which stage the sphere arises as the minimal symmetry object consistent with isotropy.
3. Coherence and Standing-Wave Closure
Having identified zero dimension with maximal isotropy rather than with a literal point, we now ask how isotropy can be coherently differentiated. The purpose of this section is twofold: (i) to clarify why the sphere is the appropriate symmetry object on which differentiation can be analyzed, and (ii) to introduce a precise, pre-dynamical notion of coherent closure.
3.1. Coherent Closure
Coherent closure is the requirement that any local differentiation introduced on the isotropic domain must extend to a globally compatible configuration. Coherence, in this sense, is not a temporal or dynamical concept. It does not refer to oscillation, propagation, or energy minimization. Rather, it is a structural condition: introduced relations must not contradict one another when considered collectively.
Definition 1
(Coherent closure / closure-compatibility). Let S denote the isotropy symmetry domain (the direction sphere), and let a proposed first differentiation be specified by a finite set of distinguished sites together with a finite family of relational constraints (e.g., antipodality, equal-angle conditions, conjugate pairing). We say is closure-compatible (or coherent) if the constraints are jointly satisfiable on S—that is, if there exists at least one global placement of the sites on S realizing all specified relations simultaneously. In the finite-extrema setting of Paper I, coherence therefore reduces to the existence of a solution to a closed system of algebraic relations among inner products of unit directions.
The standing-wave analogy is useful but must be handled carefully. In physical systems, standing waves arise through the interaction of dynamics with boundary conditions. Here we abstract only the closure aspect: a “standing-wave–like” configuration is one in which distinctions recur in a globally compatible pattern, rather than dissolving into incoherent variation. The emphasis is on compatibility under closure, not motion.
A characteristic scale becomes meaningful for the first time at this stage. Differentiation that is both coherent and minimal must be neither infinitesimal nor arbitrary: it must recur in a way that preserves isotropy globally while allowing nontrivial local structure. We assume a single characteristic scale at first emergence.
3.2. Admissibility Postulates A1–A5
- A1 (Maximal isotropy). The starting state is nondifferentiated: no preferred direction or axis.
- A2 (Coherent closure). Admissible differentiation must be globally compatible (closure-consistent) on the isotropic symmetry domain. In particular, closed relational cycles must return to a compatible state (no monodromy / frustration).
- A3 (Discrete extrema as an admissibility restriction). We restrict first differentiation to a finite set of distinguished extrema (relational markers). This is a deliberate choice: continua typically require additional stabilizing structure (regularity class, functional, or dynamics) not assumed in Paper I, whereas finite extremal sets can be symmetry-fixed with no extra parameters.
- A4 (Minimality / single scale). First differentiation is single-scale and minimizes free parameters while avoiding degeneracy. Operationally, for a finite set of N distinguished directions on the unit sphere, we model this as a maximin separation (spherical code) criterion: choose configurations that maximize the minimal pairwise angular separation; see the simplex bound of Rankin [6].
- A5 (Conjugate completion). When closure admits a natural complementary (phase-inverted / dual) configuration, minimal completion by that conjugate is treated as canonical. The completion is functorially determined by symmetry and introduces no new continuous parameters.
Remark 1
(Selection principles, not physical laws). Postulates A1–A5 are methodological selection criteria for what we call “admissible first differentiation.” They are not asserted as laws of nature, nor as claims about dynamical realization. Later work may add (or replace) these criteria when modeling mechanism or dynamics; the present results depend only on the explicit postulates stated here.

Table 1.
Admissibility postulates used in Paper I and their scope implications.
| Postulate | Content | Implication / what is deferred |
|---|---|---|
| A1 | Maximal isotropy (no preferred axis) | Rules out single-axis or single-plane “seeds” at the admissibility stage. |
| A2 | Global closure-compatibility (coherence) | Disallows local distinctions that cannot be extended to a globally consistent configuration. |
| A3 | Finite distinguished extrema | Continuum differentiations are deferred (they require extra regularity, stabilization, or dynamics not assumed in Paper I). |
| A4 | Minimality and single characteristic scale | Excludes multi-parameter families at first step; enforces symmetry-fixed configurations. |
| A5 | Conjugate completion when naturally available | Allows minimal completion (e.g., star tetrahedron) determined by symmetry without introducing new continuous parameters; this does not assert any physical wave equation or temporal phase dynamics. |
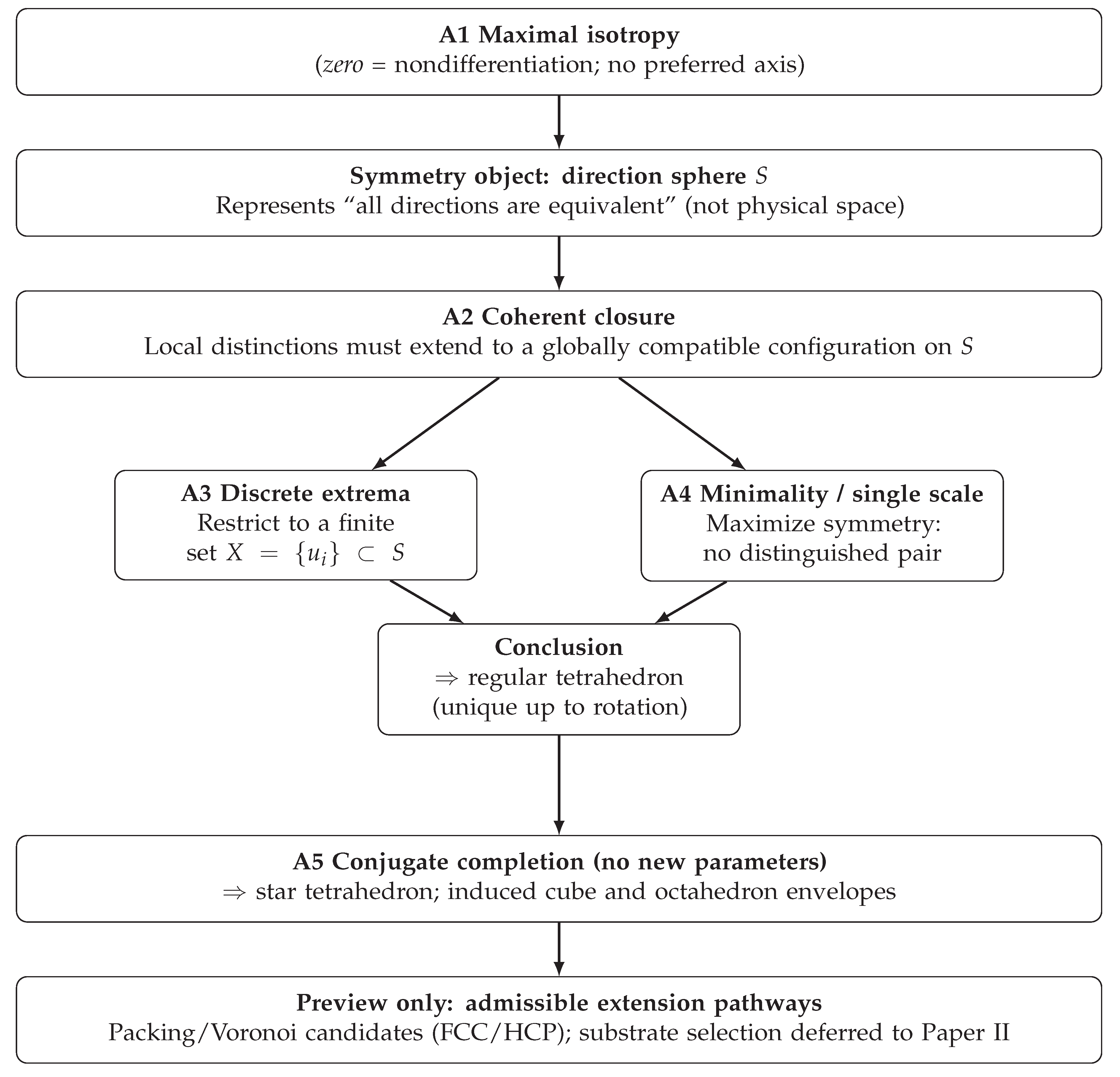
Figure 1.
Logical flow of Paper I from maximal isotropy and closure-compatibility to the minimal discrete-extrema configuration (tetrahedral) and its minimal conjugate completion.
Figure 1.
Logical flow of Paper I from maximal isotropy and closure-compatibility to the minimal discrete-extrema configuration (tetrahedral) and its minimal conjugate completion.
3.3. Discrete Extrema and Intrinsic Dimensionality
Proposition 1
(Intrinsic three-dimensionality at ). Assume Postulates A1–A4. If N denotes the number of distinguished extrema (or directions), then the smallest admissible configuration is , and the resulting relation has intrinsic dimension .
Proof.
By A1, the configuration may not privilege a single direction or axis. Hence is excluded. For , any two distinguished points define an axis, violating maximal isotropy at first emergence. For , the maximin separation problem on the sphere yields an equilateral triangle whose affine span is two-dimensional; thus is compatible only with .
For , the maximin criterion on the sphere is solved by the regular simplex (tetrahedral) arrangement: all pairwise distances are equal, and no configuration of four points on the sphere has a larger minimal separation (Rankin’s simplex bound [6]). The affine span of the regular tetrahedron is three-dimensional, so the intrinsic dimension of the first nondegenerate coherent differentiation is . □
The tetrahedron does not appear here as a polyhedron embedded in a pre-existing three-dimensional space. Rather, it is the first configuration for which an intrinsically three-dimensional relational interpretation is unavoidable (Proposition 1). Dimensionality, in this framework, is not presupposed; it is forced by the non-degeneracy and global-compatibility requirements of coherent differentiation.
A concrete coordinate model (representational). Once Proposition 1 fixes , one may choose a representative realization in . A standard choice for the regular tetrahedron directions is
This coordinate representation is used only for visualization and for describing the conjugate completion in Section 4.
This conclusion is purely geometric and pre-dynamical. No assumptions have been made about physical space, time, forces, or material constituents. The tetrahedron arises solely as the minimal solution to the problem of coherently differentiating a maximally isotropic background.
Forward pointer.
In the next section we examine minimal conjugate completion and the resulting polyhedral envelopes (star tetrahedron, cube, octahedron) as geometric consequences of closure.
Figure 2.
Euclidean realization used only after intrinsic dimensionality is fixed: (a) the regular tetrahedron (simplex optimum for ); (b) the star tetrahedron (stella octangula), with the cube (dashed) and octahedron (dotted) envelopes. The octahedron is the intersection solid of the two conjugate tetrahedra (equivalently, the star tetrahedron is the stellation of the octahedron).
Figure 2.
Euclidean realization used only after intrinsic dimensionality is fixed: (a) the regular tetrahedron (simplex optimum for ); (b) the star tetrahedron (stella octangula), with the cube (dashed) and octahedron (dotted) envelopes. The octahedron is the intersection solid of the two conjugate tetrahedra (equivalently, the star tetrahedron is the stellation of the octahedron).
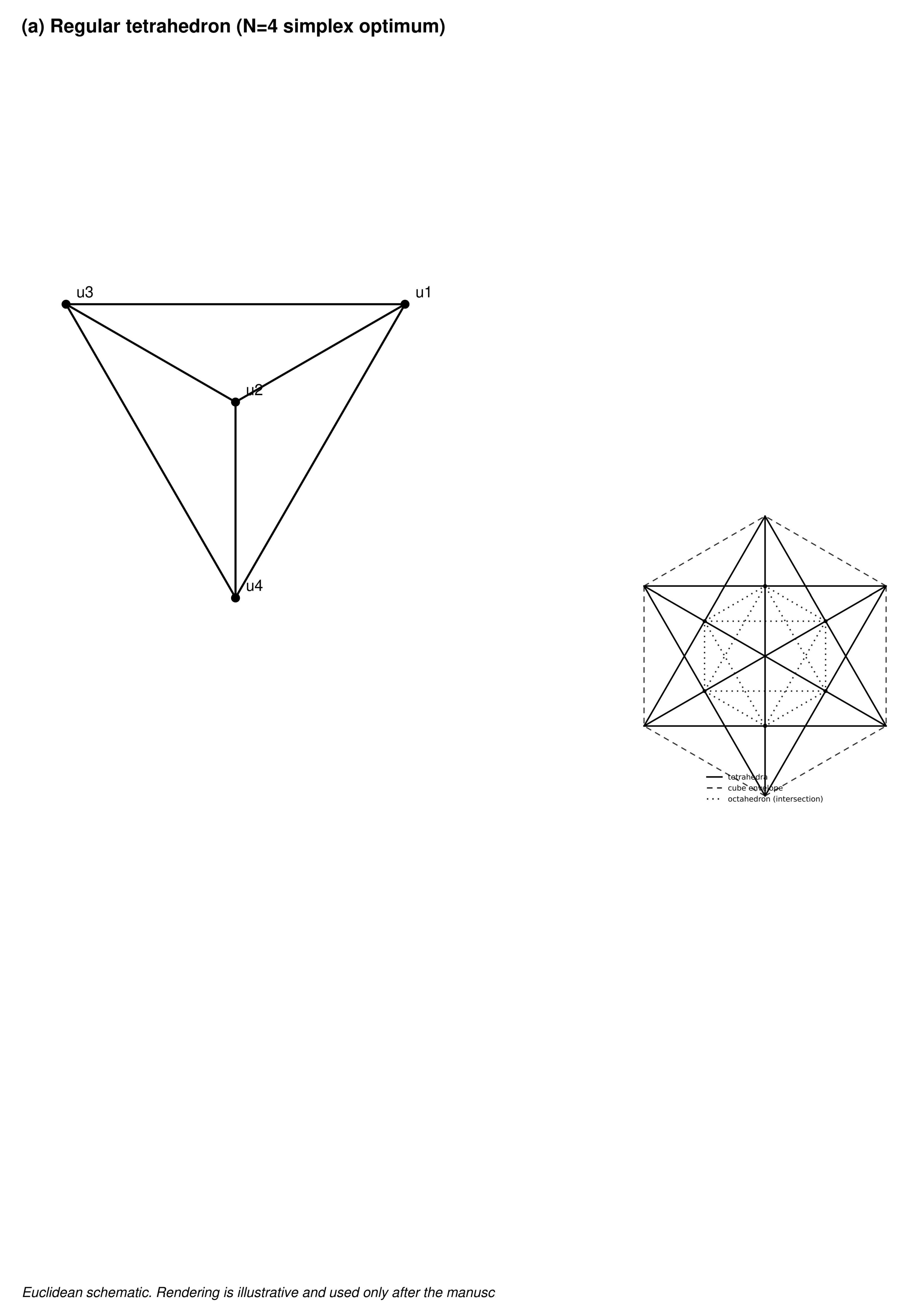
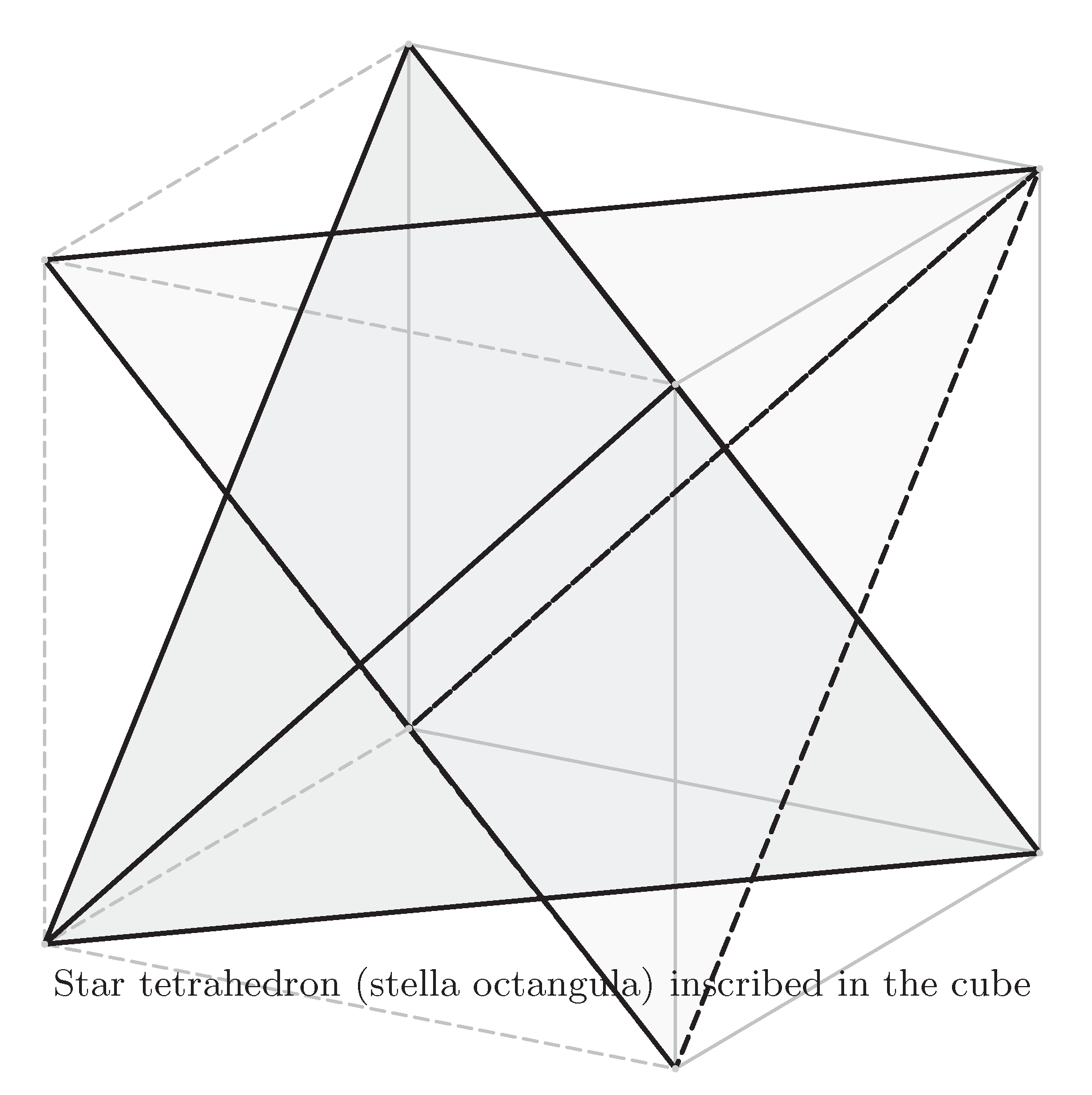
Figure 3.
Star tetrahedron (stella octangula) inscribed in the cube. This figure supports the envelope discussion in Section 4.
Figure 3.
Star tetrahedron (stella octangula) inscribed in the cube. This figure supports the envelope discussion in Section 4.
4. Conjugate Completion and Polyhedral Envelopes
Coherent differentiation that admits extrema also admits complementary structure: in closure-compatible patterns, distinguished sites come with natural duals (e.g., sign-inverted, antipodal, or phase-complementary counterparts). This is not a dynamical statement; it is a symmetry-completion requirement consistent with A5.
Applying this principle to the tetrahedral configuration yields an interpenetrating dual tetrahedron, forming the star tetrahedron (stellation). This completion preserves the symmetry of the original configuration and introduces no new length scale.
Two polyhedra appear naturally as envelopes of this completed arrangement.
Cube (combinatorial envelope).
The eight vertices of the star-tetrahedral configuration coincide with the vertices of a cube. In this sense the cube is not introduced independently; it is the simplest combinatorial enclosure of the completed tetrahedral extrema.[7]
Coordinate realization (cube from conjugate completion). Using the tetrahedral directions in Eq. (1), conjugate completion corresponds to adjoining the antipodal set . The union contains eight directions,
which are the vertices of a cube (in the standard embedding of the direction sphere in ). This is a representational statement: it exhibits the unique single-scale completion and its induced combinatorial envelope.
Octahedron (overlap/dual envelope).
The cube determined above has a canonical dual: the octahedron whose vertices are the face-centers of the cube. In the star-tetrahedral completion, these face-center sites encode the most symmetric between-relations among the completed extrema (they are equidistant from four cube vertices, hence from a balanced subset of extrema). In this sense the octahedron arises as the minimal overlap/dual envelope induced by conjugate completion, introducing no new scale beyond the cube set by the tetrahedral pair.[7]
5. Admissible Extensions (Preview Only)
Scope note.
This section records admissible continuation candidates consistent with the hierarchy above. It does not select a unique physical substrate. Substrate selection and competing candidates are deferred to later work.
The cube provides a bridge from minimal closed configuration to extendable coordination. Unlike the tetrahedron, the cube admits straightforward repetition into homogeneous lattices. Such repetition motivates (but does not compel) consideration of close-packed extensions.
Among close-packed structures in three dimensions, face-centered cubic (FCC) and hexagonal close-packed (HCP) achieve maximal local coordination, exhibiting a well-known degeneracy at the level of packing efficiency. Within this paper we do not resolve that degeneracy. We record FCC as a canonical representative because its Voronoi cell is the rhombic dodecahedron, a highly symmetric partition cell compatible with isotropy-preserving extension.[5]
6. Discussion
Starting from maximal isotropy and a minimal closure-compatibility constraint, we derived a constrained hierarchy of admissible structures. The derivation is intentionally static and pre-dynamical: no physical laws, time evolution, or interaction mechanisms were assumed or invoked.
Selection principles versus physical laws. The result “tetrahedron first” is an admissibility claim conditional on A1–A5 (Section 3.2); see Remark 1. We make no claim here about dynamical realization or cosmological boundary conditions.
Context. For a brief placement within operational and physics-facing foundational programs, see Section 1.1.
Under these constraints, discrete extrema are forced as the minimal coherent differentiations of isotropy. The regular tetrahedron emerges as the minimal non-degenerate configuration avoiding axial or planar reduction. Completion under conjugation yields a star-tetrahedral structure, from which cubic and octahedral envelopes follow as derived consequences. We then recorded admissible extension pathways toward packing and Voronoi structure, with a strict scope boundary: no substrate selection occurs in Paper I.
Several limitations are essential. First, no claim is made that the structures identified here are uniquely realized in nature. The analysis establishes admissibility and minimality, not physical necessity. Second, the present work does not address dynamics, energetics, stability under perturbation, or coupling to physical fields. These aspects are indispensable for physical application but lie outside the scope of this paper.
The primary value of the present work is the separation of geometric admissibility from dynamical explanation. In this respect the paper is closer in spirit to an axiomatic “conditions of possibility” project than to a physical model, echoing the foundational posture exemplified by Hilbert.[14] By identifying which structures are compatible with isotropy and closure alone, we clarify which features of observed structure require additional physical input and which may be understood as pre-dynamical constraints.
7. Outlook
This paper is the geometric-admissibility foundation for a broader program.
Emergent Mechanism Theory (EMT): mechanism and emergence.
Emergent Mechanism Theory will address how functional organization and mechanism-like behavior can arise on top of the admissible substrate identified here, without presupposing a specific dynamical microtheory.
Unified Harmonic Theory (UHT): operators and propagation.
Unified Harmonic Theory will introduce operators and spectral/dynamical structure compatible with the static hierarchy derived here, enabling propagation and resonance analysis on the resulting substrate.
Boundary. Paper I stops at admissibility. Mechanism (EMT) and operators/dynamics (UHT) belong strictly to subsequent work; none of those developments are required to assess the arguments in the present paper.
Author Contributions
The author is the sole contributor.
Funding
The author received no external funding.
Data Availability Statement
No new datasets were generated or analyzed in this study. No custom code was used beyond standard sources.
Use of Artificial Intelligence
The author used an AI language model for language-level polishing and assistance in translating pre-existing conceptual ideas into standard academic prose; the author is fully responsible for the originality, validity, and integrity of the manuscript content.
Acknowledgments
The author thanks the foundational lineage of geometric and symmetry-based thought that motivates this work.
Conflicts of Interest
The author declares no competing interests.
Appendix A. The Direction Sphere as a Symmetry Object
This paper uses the term “sphere” in a deliberately restricted sense: it is a symmetry object representing “all directions are equivalent” once one even contemplates differentiation. It is not introduced as a physical surface embedded in a pre-existing three-dimensional space.
Operationally, a “direction” is what remains when magnitude and location are ignored. One way to formalize this is to take the set of all nonzero vectors in an abstract real inner-product space and identify vectors that differ by positive scaling. In any concrete Euclidean proxy, this quotient may be represented by unit vectors, i.e. by a sphere.
The admissibility arguments in Sections 3–3.3 can be read in a coordinate-free way: they depend only on inner products (pairwise relations) and symmetry/closure requirements, not on an ambient metric space. Once Proposition 1 shows that the minimal non-degenerate extremal configuration requires at least three independent degrees of freedom, it becomes legitimate—as a matter of representation, not ontology—to choose coordinates in and write explicit vectors such as Eq. (1). Any two such choices are related by an orthogonal transformation, reflecting the “unique up to rotation” status of the result.
In this sense, the sphere appears twice in the logical stack: (i) initially, as the minimal symmetry representation of directional equivalence at “zero”; and (ii) later, as the canonical unit-direction representation once the tetrahedral configuration forces three independent degrees of freedom. Neither usage asserts that physical space pre-exists the admissibility derivation.
References
- Plato. Timaeus. In Plato: Complete Works; Cooper, J. M., Ed.; Hackett: Indianapolis, 1997. [Google Scholar]
- Klein, F.; Haskell, M. W. A comparative review of recent researches in geometry (Erlangen Program). Bull. New York Math. Soc. 2, 215–249 (1893). (Original 1872; translated by M. W. Haskell). [CrossRef]
- Weyl, H. Symmetry; Princeton University Press: Princeton, NJ, 1952. [Google Scholar]
- Weyl, H.: Space–Time–Matter, 4th edn. Methuen, London (1922). Reprint: Dover.
- Conway, J.H.; Sloane, N. Sphere Packings, Lattices and Groups, 3rd edn; Springer: New York, 1999. [Google Scholar]
- Rankin, R.A. : The closest packing of spherical caps in n dimensions. Proc. Glasgow Math. Assoc. 1955, 2, 139–144. [Google Scholar] [CrossRef]
- Coxeter, H. Regular Polytopes, 3rd edn; Dover: New York, 1973. [Google Scholar]
- Bridgman, P.W. The Logic of Modern Physics; Macmillan: New York, 1927. [Google Scholar]
- Wheeler, J.A. Geometrodynamics; Academic Press: New York, 1962. [Google Scholar]
- Regge, T. : General relativity without coordinates. Il Nuovo Cimento 1961, 19, 558–571. [Google Scholar] [CrossRef]
- Penrose, R. : Angular momentum: an approach to combinatorial space-time. In Quantum Theory and Beyond; Bastin, T., Ed.; Cambridge University Press: Cambridge, 1971. [Google Scholar]
- Bombelli, L.; Lee, J.; Meyer, D.; Sorkin, R. : Space-time as a causal set. Phys. Rev. Lett. 1987, 59, 521–524. [Google Scholar] [CrossRef] [PubMed]
- Sorkin, R.D. : Causal sets: discrete gravity. In Lectures on Quantum Gravity; Gomberoff, A., Marolf, D., Eds.; Springer: New York, 2005. [Google Scholar] [CrossRef]
- Hilbert, D. : Mathematical problems. Bull. Amer. Math. Soc. 1902, 8, 437–479. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



