
Submitted:
30 January 2026
Posted:
02 February 2026
You are already at the latest version
Abstract
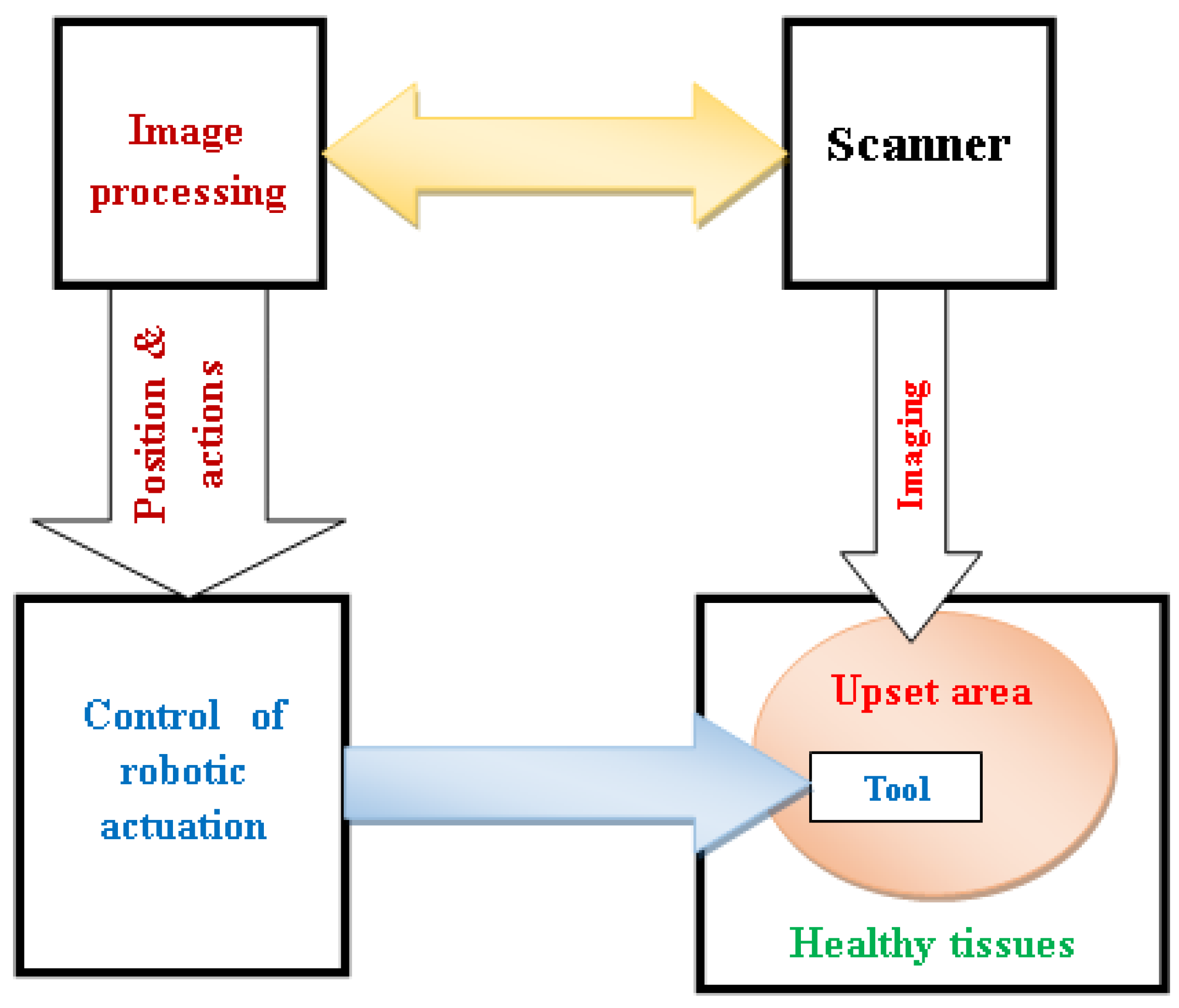
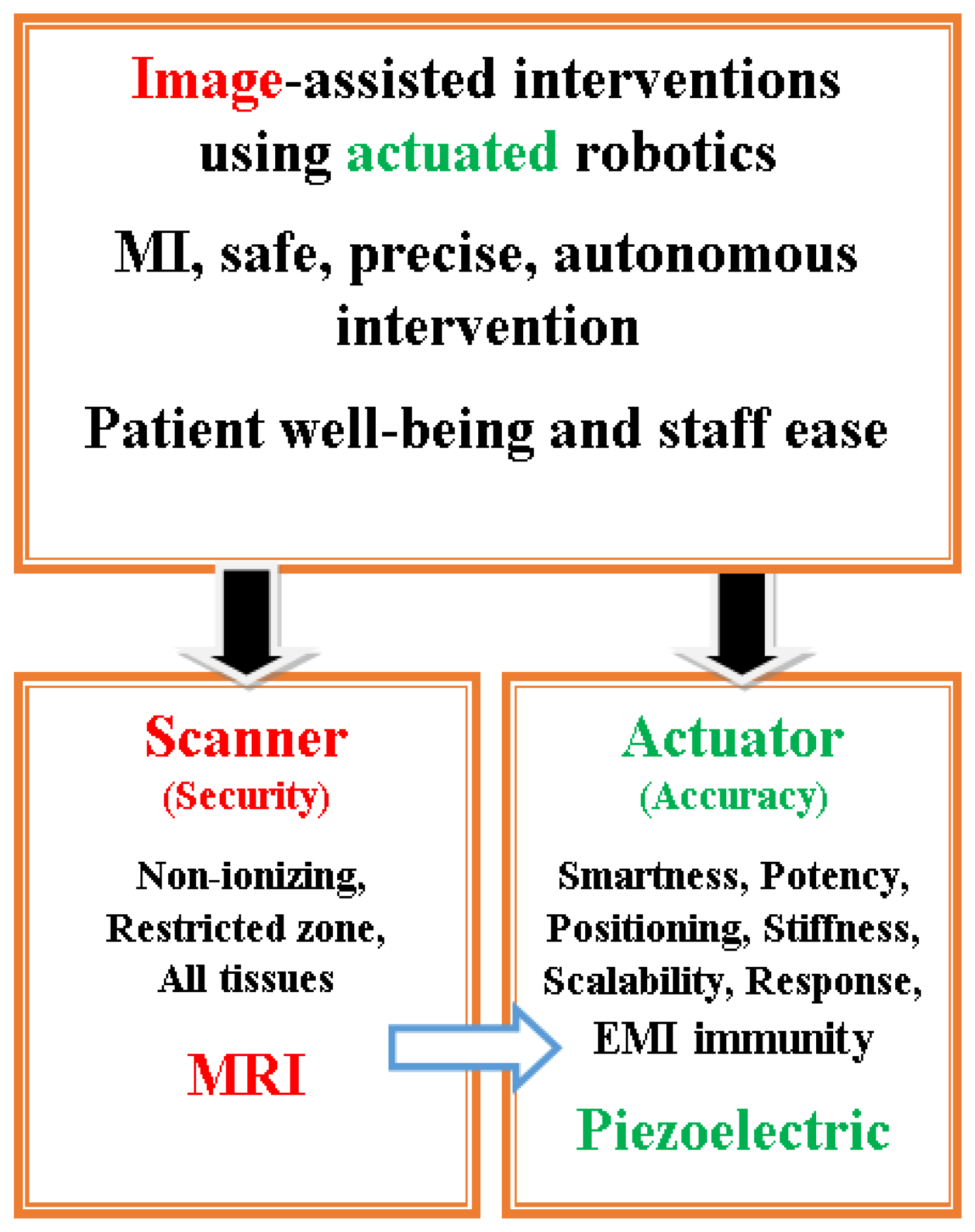
This narrative review aims to highlight and analyze the supervision of precision robotic surgical interventions. These are autonomous, closed-loop procedures, assisted by image and managed by intelligent digital tools. These administered procedures are designed to be safe and reliable, adhering to the principles of minimal invasiveness, precise positioning, and non-toxicity. Thus, a precision intervention uses non-ionizing imaging-assisted robotics, controlled by a precise positioning device, forming an autonomous procedure augmented by artificial intelligence tools and supervised by digital twins. This intelligent digital management allows staff to plan, train, predict, and execute interventions under human supervision. Patient safety and staff efficiency are linked to non-ionizing imaging, minimal invasiveness through image guidance, and strict delimitation of the intervention zone through precise positioning. This contribution includes therapeutic and surgical interventions, imaging strategies integrating diagnostic and assistance functions, intelligent digital tools including digital twins and artificial intelligence, image-guided procedures including autonomous and precision robotic surgical interventions increased by machine learning, as well as augmented healthcare monitoring. All topics addressed in this analysis are supported by examples from the literature.
Keywords:
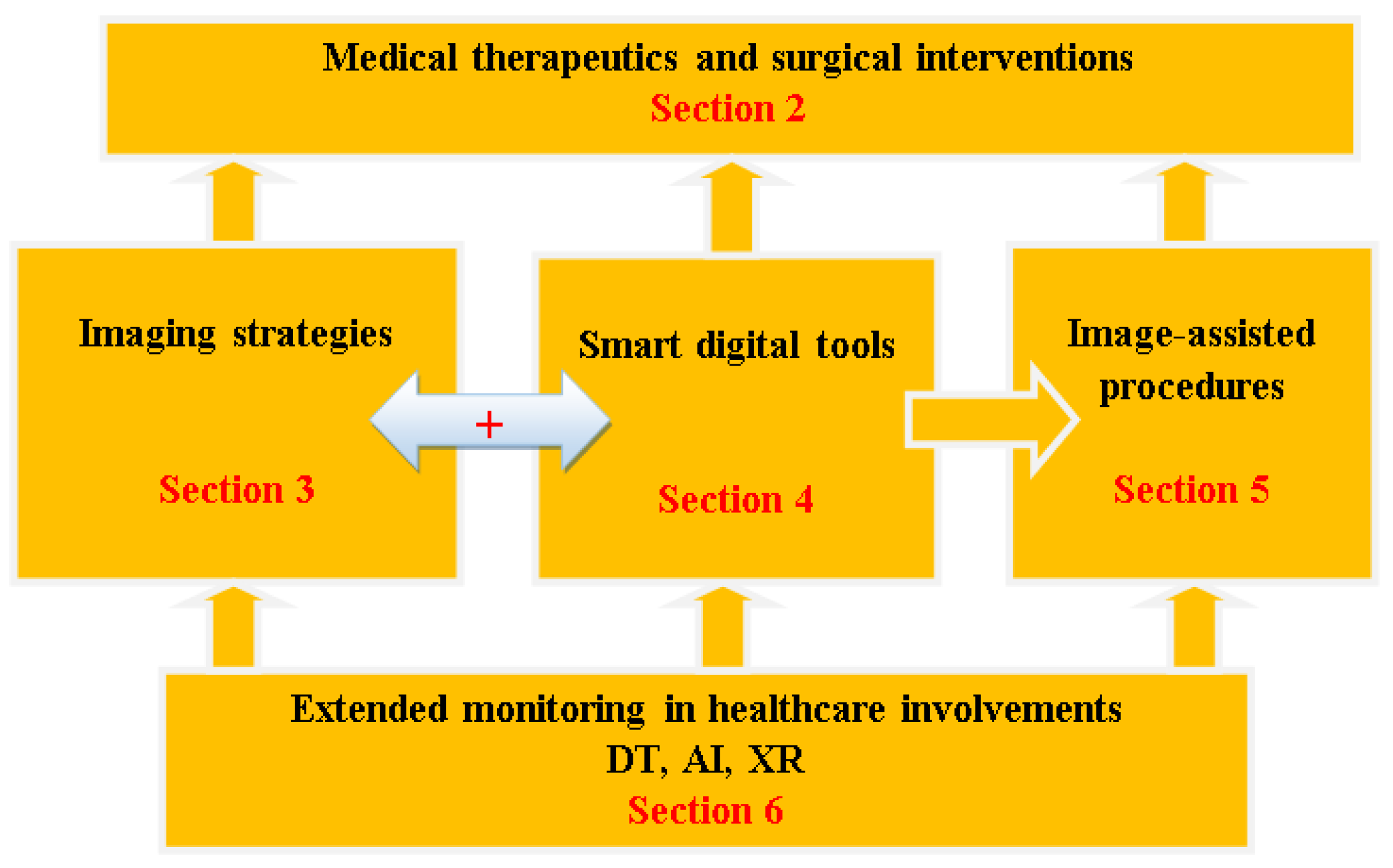
1. Introduction
- Medical therapeutics and surgical interventions including wearable sensing and assistive tools and robotic interventional procedures.
- Imaging strategies including diagnostic functions, assistive duties as well as security and compatibility issues.
- Smart digital tools comprising artificial intelligence implements and digital twins’ mechanisms.
- Image-assisted procedures involving autonomous and precision robotic surgical interventions, the integration of AI and ML practices, and robotic actuation.
- Extended monitoring in healthcare involvements and related magnitudes for staff supplemented tasks and patient well-being enhancement as well as AI and XR in the managing of MRI-guided autonomous interventions.
- Supplementing discussion and conclusions.
2. Therapeutics and Surgical Interventions
2.1. Wearable Sensing and Assistive Tools
2.2. Robotic Interventional Procedures
3. Imaging Strategies
4. Smart Digital Tools
4.1. Artificial Intelligence Tools
4.2. Digital Twins
5. Image-Assisted Interventional Procedures
5.1. Autonomous and Precision Robotic Surgical Interventions
5.2. Integration of AI and ML Practices
5.3. Tailored Actuation Technologies
5.4. Actuated Robots and Self-Actuated Miniature Robots
6. Augmented Monitoring in Healthcare Involvements
6.1. Enhancement of Staff Skills
6.2. Enhancement of Healthcare
6.3. DT, AI and XR in the Managing of MRI-Guided Interventions
7. Discussion
7.1. Relation between Digital Skills and Innovations
7.2. Coordinated Strategies for Digital Health Creation
7.3. Validation Investigations and Path to Clinical Implementations
7.4. Autonomous Procedure Complexity Admin and Model Reduction in DT
7.5. Medical Devices Vulnerability to EMI
7.6. Future Research Perspectives
8. Conclusions
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Razek, A. Image-Guided Surgical and Pharmacotherapeutic Routines as Part of Diligent Medical Treatment. Appl. Sci. 2023, 13, 13039. [Google Scholar] [CrossRef]
- Chen, S; Fan, S; Qiao, Z; Wu, Z; Lin, B; Li, Z; Riegler, MA; Wong, MYH; Opheim, A; Korostynska, O; Nielsen, KM; Glott, T; Martinsen, ACT; Telle-Hansen, VH; Lim, CT. Transforming Healthcare: Intelligent Wearable Sensors Empowered by Smart Materials and Artificial Intelligence. Adv Mater. 2025, 37(21), e2500412. [Google Scholar] [CrossRef]
- Martinez-Hernandez, U.; Metcalfe, B.; Assaf, T.; Jabban, L.; Male, J.; Zhang, D. Wearable Assistive Robotics: A Perspective on Current Challenges and Future Trends. Sensors 2021, 21, 6751. [Google Scholar] [CrossRef]
- Li, Y; Luo, S; Luo, R; Liu, H. A novel real-time assistive hip-wearable exoskeleton robot based on motion prediction for lower extremity rehabilitation in subacute stroke: a single-blinded, randomized controlled trial. BMC Neurol. 2025, 25(1), 399. [Google Scholar] [CrossRef]
- Winterbottom, L; Chen, A; Mendonca, R; Nilsen, DM; Ciocarlie, M; Stein, J. Clinician perceptions of a novel wearable robotic hand orthosis for post-stroke hemiparesis. Disabil Rehabil. 2025, 47(6), 1577–1586. [Google Scholar] [CrossRef]
- Razek, A. From Open, Laparoscopic, or Computerized Surgical Interventions to the Prospects of Image-Guided Involvement. Appl. Sci. 2025, 15, 4826. [Google Scholar] [CrossRef]
- Yang, X.; Duan, A.; Jiang, Z.; Li, X.; Wang, C.; Wang, J.; Zhou, J. Segmentation and Classification of Lung Cancer Images Using Deep Learning. Appl. Sci. 2026, 16, 628. [Google Scholar] [CrossRef]
- Franco, L; Toma, M. Validation strategies for automated MRI-based classification of Alzheimer’s disease using deep feature extraction and machine learning. Artificial Intelligence in Health 2025, 025360073. [Google Scholar] [CrossRef]
- Grieves, M; Vickers, J. Digital twin: Mitigating unpredictable, undesirable emergent behavior in complex systems. In Trans-disciplinary Perspectives on Complex Systems; Springer: Cham, Switzerland, 2017; pp. 85–113. [Google Scholar] [CrossRef]
- Tao, F; Sui, F; Liu, A; Qi, Q; Zhang, M; Song, B; Guo, Z; Lu, SCY; Nee, AYC. Digital twin-driven product design framework. Int J Prod Res. 2019, 57, 3935–3953. [Google Scholar] [CrossRef]
- Sun, T; He, X; Li, Z. Digital twin in healthcare: Recent updates and challenges. Digit Health 2023, 9, 20552076221149651. [Google Scholar] [CrossRef]
- Asciak, L; Kyeremeh, J; Luo, X; Kazakidi, A; Connolly, P; Picard, F; O’Neill, K; Tsaftaris, SA; Stewart, GD; Shu, W. Digital twin assisted surgery, concept, opportunities, and challenges. NPJ Digit Med. 2025, 8(1), 32. [Google Scholar] [CrossRef]
- Wah, JNK. The rise of robotics and AI-assisted surgery in modern healthcare. J Robot Surg. 2025, 19(1), 311. [Google Scholar] [CrossRef]
- Karalis, V.D. The Integration of Artificial Intelligence into Clinical Practice. Appl. Biosci. 2024, 3, 14–44. [Google Scholar] [CrossRef]
- Nasef, D; Nasef, D; Sawiris, V; Weinstein, B; Garcia, J; Toma, M. Integrating artificial intelligence in clinical practice, hospital management, and health policy: literature review. J Hosp Manag Health Policy 2025, 9. [Google Scholar] [CrossRef]
- Boeken, T; Lim, HD; Cohen, EI. The Role and Future of Artificial Intelligence in Robotic Image-Guided Interventions. Tech Vasc Interv Radiol. 2024, 27(4), 101001. [Google Scholar] [CrossRef]
- Han, F; Huang, X; Wang, X; Chen, YF; Lu, C; Li, S; Lu, L; Zhang, DW. Artificial Intelligence in Orthopedic Surgery: Current Applications, Challenges, and Future Directions. MedComm (2020) 2025, 6(7), e70260. [Google Scholar] [CrossRef]
- Oyama, S; Iwase, H; Yoneda, H; Yokota, H; Hirata, H; Yamamoto, M. Insights and trends review: Use of extended reality (xR) in hand surgery. J Hand Surg Eur Vol. 2025(50(6)), 762–770. [CrossRef]
- Angrisani, L.; D’Arco, M.; De Benedetto, E.; Duraccio, L.; Lo Regio, F.; Sansone, M.; Tedesco, A. Performance Measurement of Gesture-Based Human–Machine Interfaces Within eXtended Reality Head-Mounted Displays. Sensors 2025, 25, 2831. [Google Scholar] [CrossRef]
- Guerra-Armas, J.; Roldán-Ruiz, A.; Flores-Cortes, M.; Harvie, D.S. Harnessing Extended Reality for Neurocognitive Training in Chronic Pain: State of the Art, Opportunities, and Future Directions. Healthcare 2025, 13, 1338. [Google Scholar] [CrossRef]
- Razek, A.; Bernard, Y. Potential of Piezoelectric Actuation and Sensing in High Reliability Precision Mechanisms and Their Applications in Medical Therapeutics. Actuators 2025, 14, 528. [Google Scholar] [CrossRef]
- Razek, A.; Pichon, L. Smart Digital Environments for Monitoring Precision Medical Interventions and Wearable Observation and Assistance. Technologies 2026, 14, 40. [Google Scholar] [CrossRef]
- Gao, T; Qiu, X; Xu, P; Hu, Z; Yan, J; Xiang, Y; Xuan, FZ. Piezoelectret-based dual-mode flexible pressure sensor for accurate wrist pulse signal acquisition in health monitoring. Measurement 2025, 242, 116283. [Google Scholar] [CrossRef]
- Xie, Q; Han, L; Liu, J; Zhang, W; Zhao, L; Liu, Y; Chen, Y; Li, Y; Zhou, Q; Dong, Y; Wang, X. Kirigami-Inspired Stretchable Piezoelectret Sensor for Analysis and Assessment of Parkinson’s Tremor. Advanced Healthcare Materials 2025, 14(1), 2402010. [Google Scholar] [CrossRef]
- Liu, E.; Cai, Z.; Ye, Y.; Zhou, M.; Liao, H.; Yi, Y. An Overview of Flexible Sensors: Development, Application, and Challenges. Sensors 2023, 23, 817. [Google Scholar] [CrossRef]
- Devi, D.H.; Duraisamy, K.; Armghan, A.; Alsharari, M.; Aliqab, K.; Sorathiya, V.; Das, S.; Rashid, N. 5G Technology in Healthcare and Wearable Devices: A Review. Sensors 2023, 23, 2519. [Google Scholar] [CrossRef]
- Mukhopadhyay, S.C.; Suryadevara, N.K.; Nag, A. Wearable Sensors for Healthcare: Fabrication to Application. Sensors 2022, 22, 5137. [Google Scholar] [CrossRef]
- Chakrabarti, S.; Biswas, N.; Jones, L.D.; Kesari, S.; Ashili, S. Smart Consumer Wearables as Digital Diagnostic Tools: A Review. Diagnostics 2022, 12, 2110. [Google Scholar] [CrossRef]
- Escobar-Linero, E.; Muñoz-Saavedra, L.; Luna-Perejón, F.; Sevillano, J.L.; Domínguez-Morales, M. Wearable Health Devices for Diagnosis Support: Evolution and Future Tendencies. Sensors 2023, 23, 1678. [Google Scholar] [CrossRef]
- Pantelopoulos, A.; Bourbakis, N.G. A survey on wearable sensor-based systems for health monitoring and prognosis. IEEE Trans. Syst. Man. Cybern. Part C 2010, 40, 1–12. [Google Scholar] [CrossRef]
- Ahmed, M.R.; Newby, S.; Potluri, P.; Mirihanage, W.; Fernando, A. Emerging Paradigms in Fetal Heart Rate Monitoring: Evaluating the Efficacy and Application of Innovative Textile-Based Wearables. Sensors 2024, 24, 6066. [Google Scholar] [CrossRef]
- Moon, K.S.; Lee, S.Q. A Wearable Multimodal Wireless Sensing System for Respiratory Monitoring and Analysis. Sensors 2023, 23, 6790. [Google Scholar] [CrossRef]
- Khan Mamun, M.M.R.; Sherif, A. Advancement in the Cuffless and Noninvasive Measurement of Blood Pressure: A Review of the Literature and Open Challenges. Bioengineering 2023, 10, 27. [Google Scholar] [CrossRef]
- Xing, Y.; Yang, K.; Lu, A.; Mackie, K.; Guo, F. Sensors and Devices Guided by Artificial Intelligence for Personalized Pain Medicine. Cyborg Bionic Syst. 2024, 13, 0160. [Google Scholar] [CrossRef]
- Ding, S; Pichon, L; Chen, Y. A Low-cost Microwave Stentenna for In-stent Restenosis Detection. IEEE Transactions on Antennas and Propagation 2025, Early Access. [CrossRef]
- Mohan, A; Kumar, N. Implantable antennas for biomedical applications: a systematic review. Biomed Eng Online 2024, 23(1), 87. [Google Scholar] [CrossRef]
- Aliqab, K.; Nadeem, I.; Khan, S.R. A Comprehensive Review of In-Body Biomedical Antennas: Design, Challenges and Applications. Micromachines 2023, 14, 1472. [Google Scholar] [CrossRef]
- Alyami, A.M.; Kirimi, M.T.; Neale, S.L.; Mercer, J.R. Implantable Biosensors for Vascular Diseases: Directions for the Next Generation of Active Diagnostic and Therapeutic Medical Device Technologies. Biosensors 2025, 15, 147. [Google Scholar] [CrossRef]
- Kudłacik-Kramarczyk, S.; Kieres, W.; Przybyłowicz, A.; Ziejewska, C.; Marczyk, J.; Krzan, M. Recent Advances in Micro- and Nano-Enhanced Intravascular Biosensors for Real-Time Monitoring, Early Disease Diagnosis, and Drug Therapy Monitoring. Sensors 2025, 25, 4855. [Google Scholar] [CrossRef]
- Hariri, H. Design and Realization of a Piezoelectric Mobile for Cooperative Use. PhD thesis;English, University of Paris XI, 2012. Available online: https://theses.hal.science/tel-01124059v1/file/2012PA112321.pdf.
- Ding, Z; Cui, M; Wu, J; Wei, W; Rong, X; Li, Y. Development of an Untethered Self-Moving Piezoelectric Actuator With Load-Carriable, Fast, and Precise Movement Driven by Piezoelectric Stack Plates. IEEE Transactions on Industrial Electronics 2025, 99, 1–12. [Google Scholar] [CrossRef]
- Hariri, H; Bernard, Y; Razek, A. 2-D Traveling Wave Driven Piezoelectric Plate Robot for Planar Motion. IEEE/ASME Transactions on Mechatronics 2018, 23(1), 242–251. [Google Scholar] [CrossRef]
- Hariri, H; Bernard, Y; Razek, A. A traveling wave piezoelectric beam robot. Smart Materials and Structures 2014, 23(2), 025013. [Google Scholar] [CrossRef]
- Yang, Z; Dong, L; Wang, M; Liu, G; Li, X; Li, Y. A wearable insulin delivery system based on a piezoelectric micropump. Sensors and Actuators A: Physical 2022, 347, 113909. [Google Scholar] [CrossRef]
- Hernandez, C; Bernard, Y; Razek, A. Design and manufacturing of a piezoelectric traveling-wave pumping device. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control 2013, 60(9), 1949–1956. [Google Scholar] [CrossRef]
- Spanner, K.; Koc, B. Piezoelectric Motors, an Overview. Actuators 2016, 5, 6. [Google Scholar] [CrossRef]
- Ghenna, S; Bernard, Y; Daniel, L. Design and experimental analysis of a high force piezoelectric linear motor. Mechatronics 2023, 89, 102928. [Google Scholar] [CrossRef]
- Wang, S; Rong, W; Wang, L; Xie, H; Sun, L; Mills, JK. A survey of piezoelectric actuators with long working stroke in recent years: Classifications, principles, connections and distinctions. Mechanical Systems and Signal Processing 2019, 123, 591–605. [Google Scholar] [CrossRef]
- Tian, X; Liu, Y; Deng, J; Wang, L; Chen, W. A review on piezoelectric ultrasonic motors for the past decade: Classification, operating principle, performance, and future work perspectives. Sensors and Actuators A: Physical 2020, 306, 111971. [Google Scholar] [CrossRef]
- Bhuva, A.N.; Moralee, R.; Brunker, T.; Lascelles, K.; Cash, L.; Patel, K.P.; Lowe, M.; Sekhri, N.; Alpendurada, F.; Pennell, D.J.; et al. Evidence to support magnetic resonance conditional labelling of all pacemaker and defibrillator leads in patients with cardiac implantable electronic devices. Eur. Heart J. 2022, 43, 2469–2478. [Google Scholar] [CrossRef]
- Joo, H.; Lee, Y.; Kim, J.; Yoo, J.S.; Yoo, S.; Kim, S.; Arya, A.K.; Kim, S.; Choi, S.H.; Lu, N.; et al. Soft Implantable Drug Delivery Device Integrated Wirelessly with Wearable Devices to Treat Fatal Seizures. Sci. Adv. 2021, 7, eabd4639. [Google Scholar] [CrossRef]
- Cheng, Y.; Xie, D.; Han, Y.; Guo, S.; Sun, Z.; Jing, L.; Man, W.; Liu, D.; Yang, K.; Lei, D.; et al. Precise management system for chronic intractable pain patients implanted with spinal cord stimulation based on a remote programming platform: Study protocol for a randomized controlled trial (PreMaSy study). Trials 2023, 24, 580. [Google Scholar] [CrossRef]
- Gordon, J.S.; Maynes, E.J.; O’Malley, T.J.; Pavri, B.B.; Tchantchaleishvili, V. Electromagnetic interference between implantable cardiac devices and continuous-flow left ventricular assist devices: A review. J. Interv. Card. Electrophysiol. 2021, 61, 1–10. [Google Scholar] [CrossRef]
- Tetteh, E.; Wang, T.; Kim, J.Y.; Smith, T.; Norasi, H.; Van Straaten, M.G.; Lal, G.; Chrouser, K.L.; Shao, J.M.; Hallbeck, M.S. Optimizing ergonomics during open, laparoscopic, and robotic-assisted surgery: A review of surgical ergonomics literature and development of educational illustrations. Am. J. Surg. 2024, 235, 115551. [Google Scholar] [CrossRef]
- Alkatout, I.; Mechler, U.; Mettler, L.; Pape, J.; Maass, N.; Biebl, M.; Gitas, G.; Laganà, A.S.; Freytag, D. The Development of Laparoscopy-A Historical Overview. Front. Surg. 2021, 8, 799442. [Google Scholar] [CrossRef] [PubMed]
- Barrios, E.L.; Polcz, V.E.; Hensley, S.E.; Sarosi, G.A., Jr.; Mohr, A.M.; Loftus, T.J.; Upchurch, G.R., Jr.; Sumfest, J.M.; Efron, P.A.; Dunleavy, K.; et al. A narrative review of ergonomic problems, principles, and potential solutions in surgical operations. Surgery 2023, 174, 214–221. [Google Scholar] [CrossRef] [PubMed]
- Bittner, R. Laparoscopic surgery--15 years after clinical introduction. World J Surg. 2006, 30(7), 1190–1203. [Google Scholar] [CrossRef] [PubMed]
- Pérez-Salazar, M.J.; Caballero, D.; Sánchez-Margallo, J.A.; Sánchez-Margallo, F.M. Comparative Study of Ergonomics in Conventional and Robotic-Assisted Laparoscopic Surgery. Sensors 2024, 24, 3840. [Google Scholar] [CrossRef]
- Li, S.Y.; Wang, Y.; Xin, C.; Ji, L.Q.; Li, S.H.; Jiang, W.D.; Zhang, C.M.; Zhang, W.; Lou, Z. Laparoscopic surgery is associated with increased risk of postoperative peritoneal metastases in T4 colon cancer: A propensity score analysis. Int. J. Colorectal. Dis. 2025, 40, 2. [Google Scholar] [CrossRef]
- Taghavi, K.; Glenisson, M.; Loiselet, K.; Fiorenza, V.; Cornet, M.; Capito, C.; Vinit, N.; Pire, A.; Sarnacki, S.; Blanc, T. Robot-assisted laparoscopic adrenalectomy: Extended application in children. Eur. J. Surg. Oncol. 2024, 50, 108627. [Google Scholar] [CrossRef]
- Williamson, T.; Song, S.E. Robotic Surgery Techniques to Improve Traditional Laparoscopy. JSLS 2022, 26, e2022.00002. [Google Scholar] [CrossRef]
- Rivero-Moreno, Y.; Echevarria, S.; Vidal-Valderrama, C.; Pianetti, L.; Cordova-Guilarte, J.; Navarro-Gonzalez, J.; Acevedo-Rodríguez, J.; Dorado-Avila, G.; Osorio-Romero, L.; Chavez-Campos, C.; et al. Robotic Surgery: A Comprehensive Review of the Literature and Current Trends. Cureus 2023, 15, e42370. [Google Scholar] [CrossRef]
- Lima, V.L.; de Almeida, R.C.; Neto, T.R.; Rosa, A.A.M. Chapter 72—Robotic ophthalmologic surgery. In Handbook of Robotic Surgery; Zequi, S.C., Ren, H., Eds.; Academic Press: Cambridge, MA, USA, 2025; pp. 701–704. [Google Scholar] [CrossRef]
- Rivero-Moreno, Y.; Rodriguez, M.; Losada-Muñoz, P.; Redden, S.; Lopez-Lezama, S.; Vidal-Gallardo, A.; Machado-Paled, D.; Cordova Guilarte, J.; Teran-Quintero, S. Autonomous Robotic Surgery: Has the Future Arrived? Cureus 2024, 16, e52243. [Google Scholar] [CrossRef]
- Han, J.; Davids, J.; Ashrafian, H.; Darzi, A.; Elson, D.S.; Sodergren, M. A systematic review of robotic surgery: From supervised paradigms to fully autonomous robotic approaches. Int. J. Med. Robot. 2022, 18, e2358. [Google Scholar] [CrossRef]
- Lee, A.; Baker, T.S.; Bederson, J.B.; Rapoport, B.I. Levels of autonomy in FDA-cleared surgical robots: A systematic review. NPJ Digit. Med. 2024, 7, 103. [Google Scholar] [CrossRef] [PubMed]
- Wan, Q.; Shi, Y.; Xiao, X.; Li, X.; Mo, H. Review of Human–Robot Collaboration in Robotic Surgery. Adv. Intell. Syst. 2024, 7(2), 2400319. [Google Scholar] [CrossRef]
- Liu, T.; Wang, J.; Wong, S.; Razjigaev, A.; Beier, S.; Peng, S.; Do, T.N.; Song, S.; Chu, D.; Wang, C.H.; et al. A Review on the Form and Complexity of Human–Robot Interaction in the Evolution of Autonomous Surgery. Adv. Intell. Syst. 2024, 6, 2400197. [Google Scholar] [CrossRef]
- Schreiter, J.; Schott, D.; Schwenderling, L.; Hansen, C.; Heinrich, F.; Joeres, F. AR-Supported Supervision of Conditional Autonomous Robots: Considerations for Pedicle Screw Placement in the Future. J. Imaging 2022, 8, 255. [Google Scholar] [CrossRef]
- Dagnino, G; Kundrat, D. Robot-assistive minimally invasive surgery: trends and future directions. Int J Intell Robot Appl 2024, 8, 812–826. [Google Scholar] [CrossRef]
- Chinzei, K.; Hata, N.; Jolesz, F.A.; Kikinis, R. Surgical Assist Robot for the Active Navigation in the Intraoperative MRI: Hardware Design Issues. In Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2000) (Cat. No.00CH37113), Takamatsu, Japan, 31 October–5 November 2000; pp. 727–732. [Google Scholar] [CrossRef]
- Tsekos, N.V.; Khanicheh, A.; Christoforou, E.; Mavroidis, C. Magnetic resonance-compatible robotic and mechatronics systems for image-guided interventions and rehabilitation: A review study. Annu. Rev. Biomed. Eng. 2007, 9, 351–387. [Google Scholar] [CrossRef]
- Faoro, G.; Maglio, S.; Pane, S.; Iacovacci, V.; Menciassi, A. An artificial intelligence-aided robotic platform for ultrasound-guided transcarotid revascularization. IEEE Robot. Autom. Lett. 2023, 8, 2349–2356. [Google Scholar] [CrossRef]
- Su, H.; Kwok, K.W.; Cleary, K.; Iordachita, I.I.; Çavuşoğlu, M.C.; Desai, J.P.; Fischer, G.S. State of the art and future opportunities in MRI-guided robot-assisted surgery and interventions. Proc. IEEE Inst. Electr. Electron. Eng. 2022, 110, 968–992. [Google Scholar] [CrossRef]
- Padhan, J.; Tsekos, N.; Al-Ansari, A.; Abinahed, J.; Deng, Z.; Navkar, N.V. Dynamic Guidance Virtual Fixtures for Guiding Robotic Interventions: Intraoperative MRI-guided Transapical Cardiac Intervention Paradigm. In Proceedings of the 2022 IEEE 22nd International Conference on Bioinformatics and Bioengineering (BIBE), Taichung, Taiwan, 7–9 November 2022; pp. 265–270. [Google Scholar] [CrossRef]
- Singh, S.; Torrealdea, F.; Bandula, S. MR imaging-guided intervention: Evaluation of MR conditional biopsy and ablation needle tip artifacts at 3T using a balanced fast field echo sequence. J. Vasc. Interv. Radiol. 2021, 32, 1068–1074. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.; Pacia, C.P.; Gong, Y.; Hu, Z.; Chien, C.Y.; Yang, L.; Gach, H.M.; Hao, Y.; Comron, H.; Huang, J.; et al. Characterization of the targeting accuracy of a neuronavigation-guided transcranial FUS system in vitro, in vivo, and in silico. IEEE Trans. Biomed. Eng. 2023, 70, 1528–1538. [Google Scholar] [CrossRef] [PubMed]
- Navarro-Becerra, J.A.; Borden, M.A. Targeted Microbubbles for Drug, Gene, and Cell Delivery in Therapy and Immunotherapy. Pharmaceutics 2023, 15, 1625. [Google Scholar] [CrossRef] [PubMed]
- Delaney, L.J.; Isguven, S.; Eisenbrey, J.R.; Hickok, N.J.; Forsberg, F. Making waves: How ultrasound-targeted drug delivery is changing pharmaceutical approaches. Mater. Adv. 2022, 3, 3023–3040. [Google Scholar] [CrossRef]
- Remyes, D.; Nasef, D.; Remyes, S.; Tawfellos, J.; Sher, M.; Nasef, D.; Toma, M. Clinical Applicability and Cross-Dataset Validation of Machine Learning Models for Binary Glaucoma Detection. Information 2025, 16(6), 432. [Google Scholar] [CrossRef]
- Balyen, L.; Peto, T. Promising Artificial Intelligence-Machine Learning-Deep Learning Algorithms in Ophthalmology. Asia-Pac. J. Ophthalmol. 2019, 8, 264–272. [Google Scholar] [CrossRef]
- Husain, G; Mayer, J; Bekbolatova, M; Vathappallil, P; Matalia, M; Toma, M. Machine learning for medical image classification. Academia Medicine 2024, 1, 1–18. [Google Scholar] [CrossRef]
- Jha, G; Dhanjal, R; Malasani, S; Karunakaran, AV. Deep Learning in Scaphoid Fracture Detection and Healing Prediction: A Systematic Review of Artificial Intelligence Applications in Hand Surgery. Cureus 2025, 17(11), e97900. [Google Scholar] [CrossRef]
- Tougui, I; Jilbab, A; Mhamdi, JE. Impact of the choice of cross-validation techniques on the results of machine learning-based diagnostic applications. Healthc Inform Res. 2021, 27(3), 189–199. [Google Scholar] [CrossRef]
- Pelletier, ED; Jeffries, SD; Song, K; Hemmerling, TM. Comparative analysis of machine-learning model performance in image analysis: The impact of dataset diversity and size. Anesth Analg. 2024, 139(6), 1332–1339. [Google Scholar] [CrossRef]
- Yuan, H. Toward real-world deployment of machine learning for health care: External validation, continual monitoring, and randomized clinical trials. Health Care Sci. 2024, 3(5), 360–364. [Google Scholar] [CrossRef] [PubMed]
- Oke, I.; VanderVeen, D. Machine Learning Applications in Pediatric Ophthalmology. Semin. Ophthalmol. 2021, 36, 210–217. [Google Scholar] [CrossRef] [PubMed]
- Alsaih, K.; Lemaitre, G.; Rastgoo, M.; Massich, J.; Sidibé, D.; Meriaudeau, F. Machine learning techniques for diabetic macular edema (DME) classification on SD-OCT images. BioMed. Eng. OnLine 2017, 16, 68. [Google Scholar] [CrossRef] [PubMed]
- Sher, M.; Remyes, D.; Sharma, R.; Toma, M. Learning Dynamics Analysis: Assessing Generalization of Machine Learning Models for Optical Coherence Tomography Multiclass Classification. Informatics 2025, 12, 128. [Google Scholar] [CrossRef]
- De Benedictis, A; Mazzocca, N; Somma, A; Strigaroet, C. Digital twins in healthcare: An architectural proposal and its application in a social distancing case study. IEEE J Biomed Health Inform. 2022, 27, 5143–5154. [Google Scholar] [CrossRef]
- Haleem, A; Javaid, M; Singh, RP; Suman, R. Exploring the revolution in healthcare systems through the applications of digital twin technology. Biomed Technol. 2023, 4, 28–38. [Google Scholar] [CrossRef]
- Mohamed, N; Al-Jaroodi, J; Jawhar, I; Kesserwan, N. Leveraging digital twins for healthcare systems engineering. IEEE Access 2023, 11, 69841–69853. [Google Scholar] [CrossRef]
- Ricci, A; Croatti, A; Montagna, S. Pervasive and connected digital twins-a vision for digital health. IEEE Internet Comput. 2022, 26, 26–32. [Google Scholar] [CrossRef]
- Wickramasinghe, N; Ulapane, N; Sloane, EB; Gehlot, V. Digital Twins for More Precise and Personalized Treatment. Stud Health Technol Inform. 2024, 310, 229–233. [Google Scholar] [CrossRef]
- Song, Y. Human digital twin, the development and impact on design. J Comput Inf Sci Eng. 2023, 23, 060819. [Google Scholar] [CrossRef]
- Burattini, S; Montagna, S; Croatti, A; Gentili, N; Ricci, A; Leonardi, L; Pandolfini, S; Tosi, S. An Ecosystem of Digital Twins for Operating Room Management. In In: Proceedings of the 2023 IEEE 36th International Symposium on Computer-Based Medical Systems (CBMS), L’Aquila, Italy, 2023; pp. 770–775. [Google Scholar] [CrossRef]
- Hagmann, K; Hellings-Kuß, A; Klodmann, J; Richter, R; Stulp, F; Leidner, D. A digital twin approach for contextual assistance for surgeons during surgical robotics training. Front Robot AI 2021, 8, 735566. [Google Scholar] [CrossRef]
- Nadeem, M; Kostic, S; Dornhöfer, M; Weber, C; Fathi, M. A comprehensive review of digital twin in healthcare in the scope of simulative health-monitoring. Digit Health 2025, 11, 20552076241304078. [Google Scholar] [CrossRef] [PubMed]
- Jia, X.; Zhang, Y.; Du, H.; Yu, Y. Experimental study of double cable-conduit driving device for MRI compatible biopsy robots. J. Mech. Med. Biol. 2021, 21, 2140014. [Google Scholar] [CrossRef]
- Li, X.; Young, A.S.; Raman, S.S.; Lu, D.S.; Lee, Y.H.; Tsao, T.C.; Wu, H.H. Automatic needle tracking using Mask R-CNN for MRI-guided percutaneous interventions. Int. J. Comput. Assist. Radiol. Surg. 2020, 15, 1673–1684. [Google Scholar] [CrossRef] [PubMed]
- Bernardes, M.C.; Moreira, P.; Lezcano, D.; Foley, L.; Tuncali, K.; Tempany, C.; Kim, J.S.; Hata, N.; Iordachita, I.; Tokuda, J. In Vivo Feasibility Study: Evaluating Autonomous Data-Driven Robotic Needle Trajectory Correction in MRI-Guided Transperineal Procedures. IEEE Robot. Autom. Lett. 2024, 9, 8975–8982. [Google Scholar] [CrossRef]
- Wu, D.; Li, G.; Patel, N.; Yan, J.; Monfaredi, R.; Cleary, K.; Iordachita, I. Remotely Actuated Needle Driving Device for MRI-Guided Percutaneous Interventions: Force and Accuracy Evaluation. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; pp. 1985–1989. [Google Scholar] [CrossRef]
- Panyaram, S. Integrating Artificial Intelligence with Big Data for Real-Time Insights and Decision-Making in Complex Systems. FMDB Transactions on Sustainable Intelligent Networks 2024, 1(2), 85–95. [Google Scholar] [CrossRef]
- Deliu, D.; Olariu, A. The Role of Artificial Intelligence and Big Data Analytics in Shaping the Future of Professions in Industry 6.0: Perspectives from an Emerging Market. Electronics 2024, 13, 4983. [Google Scholar] [CrossRef]
- Himeur, Y; Elnour, M; Fadli, F; Meskin, N; Petri, I; Rezgui, Y; Bensaali, F; Amira, A. AI-big data analytics for building automation and management systems: a survey, actual challenges and future perspectives. Artif Intell Rev. 2023, 56(6), 4929–5021. [Google Scholar] [CrossRef]
- Parmar, A. AI-driven data analytics for real-time decision-making. Int. journal of progressive research in engineering management and science 2025, 5(5), 372–386. [Google Scholar] [CrossRef]
- Vallée, A. Digital twins for cardiovascular diseases: towards personalised and sustainable care. Acta Cardiologica 2025, 1–8. [Google Scholar] [CrossRef]
- Kantor, T; Mahajan, P; Murthi, S; Stegink, C; Brawn, B; Varshney, A; Reddy, RM. Role of eXtended Reality use in medical imaging interpretation for pre-surgical planning and intraoperative augmentation. J Med Imaging (Bellingham) 2024, 11(6), 062607. [Google Scholar] [CrossRef]
- Elkefi, S.; Asan, O. Digital twins for managing health care systems: Rapid literature review. J. Med. Internet Res. 2022, 24, e37641. [Google Scholar] [CrossRef]
- Cellina, M.; Cè, M.; Alì, M.; Irmici, G.; Ibba, S.; Caloro, E.; Fazzini, D.; Oliva, G.; Papa, S. Digital Twins: The New Frontier for Personalized Medicine? Appl. Sci. 2023, 13, 7940. [Google Scholar] [CrossRef]
- Song, H; Oh, Y; Choi, J; Ohm, SY. Effectiveness of Virtual Reality-Based Cognitive Control Training Game for Children With Attention-Deficit/Hyperactivity Disorder Symptoms: Preliminary Effectiveness Study. JMIR Pediatr Parent 2025, 19, 8. [Google Scholar] [CrossRef]
- Kayaalp, ME; Konstantinou, E; Karaismailoglu, B; Lucidi, GA; Kaymakoglu, M; Vieider, R; Giusto, JD; Inoue, J; Hirschmann, MT. The metaverse in orthopaedics: Virtual, augmented and mixed reality for advancing surgical training, arthroscopy, arthroplasty and rehabilitation. Knee Surg Sports Traumatol Arthrosc. 2025, 33(8), 3039–3050. [Google Scholar] [CrossRef] [PubMed]
- Faizan Siddiqui, M; Jabeen, S; Alwazzan, A; Vacca, S; Dalal, L; Al-Haddad, B; Jaber, A; Ballout, FF; Abou Zeid, HK; Haydamous, J; El Hajj Chehade, R; Kalmatov, R. Integration of Augmented Reality, Virtual Reality, and Extended Reality in Healthcare and Medical Education: A Glimpse into the Emerging Horizon in LMICs-A Systematic Review. J Med Educ Curric Dev. 2025, 29(12), 23821205251342315. [Google Scholar] [CrossRef] [PubMed]
- Pantusin, F.J.; Ortiz, J.S.; Carvajal, C.P.; Andaluz, V.H.; Yar, L.G.; Roberti, F.; Gandolfo, D. Digital Twin Integration for Active Learning in Robotic Manipulator Control Within Engineering 4.0. Symmetry 2025, 17, 1638. [Google Scholar] [CrossRef]
- Sang, AY; Wang, X; Paxton, L. Technological Advancements in Augmented, Mixed, and Virtual Reality Technologies for Surgery: A Systematic Review. Cureus 2024, 16(12), e76428. [Google Scholar] [CrossRef]
- Ai, X; Agrawal, SK. Remote Extended Reality with Markerless Motion Tracking for Sitting Posture Training. IEEE Robot Autom Lett. 2024, 9(11), 9860–9867. [Google Scholar] [CrossRef]
- Morimoto, T; Hirata, H; Ueno, M; Fukumori, N; Sakai, T; Sugimoto, M; Kobayashi, T; Tsukamoto, M; Yoshihara, T; Toda, Y; Oda, Y; Otani, K; Mawatari, M. Digital Transformation Will Change Medical Education and Rehabilitation in Spine Surgery. Medicina (Kaunas) 2022, 58(4), 508. [Google Scholar] [CrossRef]
- Cox, S; Kadlubsky, A; Svarverud, E; Adams, J; Baraas, RC; Bernabe, RDLC. A scoping review of the ethics frameworks describing issues related to the use of extended reality. Open Res Eur. 2025, 4, 74. [Google Scholar] [CrossRef]
- Mahajan, A; Heydari, K; Powell, D. Wearable AI to enhance patient safety and clinical decision-making. npj Digit. Med. 2025, 8, 176. [Google Scholar] [CrossRef]
- Antonakea, N.K; Chapiro, J; Geschwind, J. The Role of AI in Clinical Trial Design and Scientific Writing. In Cardiovasc Intervent Radiol; 2025. [Google Scholar] [CrossRef]
- Jasti, J; Zhong, H; Panwar, V; Jarmale, V; Miyata, J; Carrillo, D; Christie, A; Rakheja, D; Modrusan, Z; Kadel, EE, 3rd; Beig, N; Huseni, M; Brugarolas, J; Kapur, P; Rajaram, S. Histopathology based AI model predicts anti-angiogenic therapy response in renal cancer clinical trial. Nat Commun 2025, 16, 2610. [Google Scholar] [CrossRef]
- Mahajan, A; Powell, D. Transforming healthcare delivery with conversational AI platforms. npj Digit. Med. 2025, 8, 581. [Google Scholar] [CrossRef]
- Łukaniszyn, M.; Majka, Ł.; Grochowicz, B.; Mikołajewski, D.; Kawala-Sterniuk, A. Digital Twins Generated by Artificial Intelligence in Personalized Healthcare. Appl. Sci. 2024, 14, 9404. [Google Scholar] [CrossRef]
- Kabir, MR; Shishir, FS; Shomaji, S; Ray, S. Digital twins in healthcare IoT: A systematic review. High-Confidence Computing 2025, 5(3), 100340. [Google Scholar] [CrossRef]
- Chen, J; Kobayashi, E; Sakuma, I; Tomii, N. SurgEM: A Vision-Based Surgery Environment Modeling Framework for Constructing a Digital Twin Toward Autonomous Soft Tissue Manipulation. IEEE Robotics and Automation Letters 2024, 9(11), 9789–9796. [Google Scholar] [CrossRef]
- Chen, J; Jastrzebska-Perfect, P; Chai, P; Say, MG; Tu, J; Gao, W; Halperin, F; Korzenik, J; Huang, HW; Katabi, D; Traverso, G. Barriers to translating continuous monitoring technologies for preventative medicine. Nat Biomed Eng. 2025, 9(11), 1797–1815. [Google Scholar] [CrossRef]
- Hara, T; Morihiro, Y; Horise, Y; Komatsu, S; Ohashi, M; Kitatsuji, H; Yao, A; Muragaki, Y; Miyake, H. Toward safe clinical deployment of remote robotic surgery in Japan: five-year validation of the hinotori™ system using 5G wireless communication. Int J Clin Oncol. 2025, 30(12), 2389–2398. [Google Scholar] [CrossRef]
- Wang, N; Ying, Y; Wang, W; Liu, J; Wu, D; Zhao, Y. Intelligent sensing and measurement technologies for medical robotics: A review. Sensors and Actuators 2025, 394, 116956. [Google Scholar] [CrossRef]
- Ghadi, YY; Shah, SFA; Waheed, W; Mazhar, T; Ahmad, W; Saeed, MM; Hamam, H. Integration of wearable technology and artificial intelligence in digital health for remote patient care. J Cloud Comp 2025, 14, 39. [Google Scholar] [CrossRef]
- Sharma, P. Smart healthcare: the role of AI, robotics, and NLP in advancing telemedicine and remote patient monitoring. BMC Artif. Intell. 2025, 1, 14. [Google Scholar] [CrossRef]
- Deng, Z.; Guo, L.; Chen, X.; Wu, W. Smart Wearable Systems for Health Monitoring. Sensors 2023, 23, 2479. [Google Scholar] [CrossRef]
- Jiao, H; Wang, T; Libaers, D; Yang, J; Hu, L. The relationship between digital technologies and innovation: A review, critique, and research agenda. Journal of Innovation & Knowledge 2025, 10(1), 100638. [Google Scholar] [CrossRef]
- Saeedikiya, M; Salunke, S; Kowalkiewicz, M. The nexus of digital transformation and innovation: A multilevel framework and research agenda. Journal of Innovation & Knowledge 2025, 10(1), 100640. [Google Scholar] [CrossRef]
- Bamel, U; Talwar, S; Pereira, V; Corazza, L; Dhir, A. Disruptive digital innovations in healthcare: Knowing the past and anticipating the future. Technovation 2023, 125, 102785. [Google Scholar] [CrossRef]
- Singh, N; Jain, M; Kamal, MM; Bodhi, R; Gupta, B. Technological paradoxes and artificial intelligence implementation in healthcare. An application of paradox theory. Technolog. Forecasting and Social Change 2024, 198, 122967. [Google Scholar] [CrossRef]
- Alshehri, S.; Alahmari, K.A.; Alasiry, A. A Comprehensive Evaluation of AI-Assisted Diagnostic Tools in ENT Medicine: Insights and Perspectives from Healthcare Professionals. J. Pers. Med. 2024, 14, 354. [Google Scholar] [CrossRef]
- Alamri, AH; AlZabin, A; Magboul, N; Alrasheed, AS; Alokby, G; Alroqi, A. Comparative analysis of artificial intelligence platforms in generating Post-Operative instructions for endoscopic transnasal skull base surgery. Eur Arch Otorhinolaryngol 2025. [Google Scholar] [CrossRef]
- Grijalvo, M; Ordieres-Meré, J; Uche-Soria, M; Tabuenca, B; Aladro-Benito, Y. Apps and knowledge contributing to creating value for ehealth solutions. Journal of Innovation & Knowledge 2026, 12, 100886. [Google Scholar] [CrossRef]
- Harrison, S; Maple, C; Epiphaniou, G; Arvanitis, TN. Improving safety claims in digital health interventions using the digital health assessment method. DIGITAL HEALTH 2024, 10. [Google Scholar] [CrossRef]
- Harrison, S; Islam, SU; Waseem, HM; Epiphaniou, G. Digital health interventions use cases: Classification and taxonomy development, a scoping review. DIGITAL HEALTH 2025, 11. [Google Scholar] [CrossRef]
- Xue, Z; Gai, Y; Wu, Y; Liu, Z; Li, Z. Wearable mechanical and electrochemical sensors for real-time health monitoring. Commun Mater 2024, 5, 211. [Google Scholar] [CrossRef]
- Ji, J; Su, T; Lu, J; Gao, X; Zhang, L. Progress in the flexible and stretchable epidermal electrodes for wearable ECG monitoring. BME Horiz. 2025, 3, 202510. [Google Scholar] [CrossRef]
- Dias, FE; Braga, SD; Xavier, ACG; da Paz, GM; Veras, R de M S; Paiva, AC. Cervical cancer classification from Pap smear cells using machine learning models. Academia Oncology 2025, 2(4). [Google Scholar] [CrossRef]
- Piechowiak, M.; Goch, A.; Panas, E.; Masiak, J.; Mikołajewski, D.; Rojek, I.; Mikołajewska, E. From Local to Global Perspective in AI-Based Digital Twins in Healthcare. Appl. Sci. 2026, 16, 83. [Google Scholar] [CrossRef]
- Rojek, I.; Prokopowicz, P.; Piechowiak, M.; Kotlarz, P.; Náprstková, N.; Mikołajewski, D. The Impact of Data Analytics Based on Internet of Things, Edge Computing, and Artificial Intelligence on Energy Efficiency in Smart Environment. Appl. Sci. 2026, 16, 225. [Google Scholar] [CrossRef]
- Zimatore, G.; Russo, S.; Gallotta, M.C.; Passalacqua, G.; Zaborova, V.; Campanella, M.; Fiani, F.; Baldari, C.; Napoli, C.; Randieri, C. HRV in Stress Monitoring by AI: A Scoping Review. Appl. Sci. 2026, 16, 23. [Google Scholar] [CrossRef]
- Montoya-Gálvez, J.; Ivankovic, K.; Rocamora, R.; Principe, A. The Therapeutic Loop: Closed-Loop Epilepsy Systems Mirroring the Read–Write Architecture of Brain–Computer Interfaces. Appl. Sci. 2026, 16, 294. [Google Scholar] [CrossRef]
- Syrek, P.; Skowron, M. Transcranial Brain Stimulation: Technical, Computational, and Clinical Aspects in Contemporary Research. Appl. Sci. 2026, 16, 107. [Google Scholar] [CrossRef]
- Lee, J.; Kang, S.; Hong, S.W. Flexible Micro-Neural Interface Devices: Advances in Materials Integration and Scalable Manufacturing Technologies. Appl. Sci. 2026, 16, 125. [Google Scholar] [CrossRef]
- Caixeiro, D.; Cordeiro, T.; Constantino, L.; Carreira, J.; Mendes, R.; Silva, C.G.; Castro, M.A. Effectiveness of Wearable Devices for Posture Correction: A Systematic Review of Evidence from Randomized and Quasi-Experimental Studies. Appl. Sci. 2026, 16, 81. [Google Scholar] [CrossRef]
- Li, P; Lang, S; Xie, L; Zhang, Y; Gou, X; Zhang, C; Dong, C; Li, C; Yang, J. Skin-Inspired Ultra-Linear Flexible Iontronic Pressure Sensors for Wearable Musculoskeletal Monitoring. Nanomicro Lett. 2025, 18(1), 55. [Google Scholar] [CrossRef] [PubMed]
- Di Palo, M.P.; del Sorbo, R.; Pessolano, C.; Mongelli, G.; Bartolomeo, M.; Giordano, M.; Ragusa, C.M. AI-Driven Intervention with Wearable Remote Monitoring Devices for Human Health. In Product-Focused Software Process Improvement. Industry, Doctoral-Symposium, Tutorial, and Workshop Papers. PROFES 2025. Lecture Notes in Computer Science; Scanniello, G., Lenarduzzi, V., Romano, S., Vegas, S., Francese, R., Eds.; Springer: Cham, 2026; p. 16362. [Google Scholar] [CrossRef]
- Wang, W; Luo, Z; Yu, X; Yin, X; Xiang, L; Pan, A. A Highly Permeable and Three-Dimensional Integrated Electronic System for Wearable Human-Robot Interaction. Nanomicro Lett. 2026, 18(1), 128. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y; Qiu, S; Du, K; Wu, S; Xiang, T; Zheng, K; Liu, Z; Chen, H; Ji, N; Wang, F; Wu, W; Zhang, YT. Artificial Intelligence-Enhanced Wearable Blood Pressure Monitoring in Resource-Limited Settings: A Co-Design of Sensors, Model, and Deployment. Nanomicro Lett. 2026, 18(1), 164. [Google Scholar] [CrossRef]
- Qu, X.; Wan, J.; Zhao, H.; et al. Closed-loop wearable neurostimulation system with triboelectric sensing to alleviate hemifacial spasms. Nat Commun 2025, 16, 11148. [Google Scholar] [CrossRef]
- Wang, Shasha; Wei, Leqian; Wang, Fujun; Wang, Lu; Mao, Jifu. Advanced implantable energy storage for powering medical devices. eScience, Volume 5 5(2025), 100409. [CrossRef]
- Lan, Y; Li, S; Guo, H; Liu, Q; Wang, T; Zhou, L; Fang, J; Zhao, Y; Zhou, Z; Wang, Q; Li, J; Zhu, Y; Su, R; Wen, X; Xu, X; Wu, Y; Wang, Z; Liu, B; Li, J; Li, H; Gao, H; Wu, Y; Gu, Q; Feng, XQ; Yu, X; Su, Y. Soft biodegradable implants for long-distance and wide-angle sensing. Nature 2026, 649(8096), 366–374. [Google Scholar] [CrossRef]
- Velaga, ST; Jia, K; Rimsky, E; Saouma, S; Shah, R; Akhrass, P; Kowalski, M; Parikh, V. Procedural and short-term performance outcomes of dual-chamber leadless pacemakers from a single-center experience. J Interv Card Electrophysiol. 2026. [Google Scholar] [CrossRef]
- Klimasz, K.; Tomasik, J.T.; Tomasik, P.J. History of Urinalysis. Appl. Sci. 2026, 16, 175. [Google Scholar] [CrossRef]
- Benabderrahmane, F.; Kerkouche, E.; Bouchemal, N. Risk-Aware Privacy-Preserving Federated Learning for Remote Patient Monitoring: A Multi-Layer Adaptive Security Framework. Appl. Sci. 2026, 16, 29. [Google Scholar] [CrossRef]
- Rogers, S.L.; Canes, T.; Pallister, A. User Experience in Virtual Self-Disclosure: Appraising Natural, Urban, and Artificial VR Environments. Appl. Sci. 2026, 16, 33. [Google Scholar] [CrossRef]
- Zhong, H; Wang, H; Huang, B; Liu, S; Song, Z; Tang, Y; Li, J; Ye, Y; Zhou, M. Current frontier technologies in spinal cord injury research: A narrative review. Advanced Technology in Neuroscience 2026, 2(4), 173–186. [Google Scholar] [CrossRef]
- Naderi, A.; Ghanbarpour, G.; Ghanbarpour, M.; Haghiri, S.; Ahmadi, A. Sinoatrial node cells implementation by low cost digital hardware. Analog. Integr. Circuits Signal Process. 2026, 126. [Google Scholar] [CrossRef]
- Saigre, T.; Prud’Homme, C.; Szopos, M.; Chabannes, V. A coupled fluid-dynamics-heat transfer model for 3D simulations of the aqueous humor flow in the human eye. arXiv. 2024. Available online: https://arxiv.org/abs/2404.19353.
- Cornetta, G.; Touhafi, A.; Contreras, J.; Zaragoza, A. Multi-Fidelity Surrogate Models for Accelerated Multi-Objective Analog Circuit Design and Optimization. Electronics 2026, 15, 105. [Google Scholar] [CrossRef]
- Qiao, L.; Qin, J.; Lin, B.; Zhang, F.; Jiang, M. Tension–Torsion Coupling Analysis and Structural Parameter Optimization of Conductor Based on RBFNN Surrogate Model. Appl. Sci. 2026, 16, 408. [Google Scholar] [CrossRef]
- Gallardo Romero, G.; Rodríguez-Llorente, G.; Magariños Rodríguez, L.; Morant Navascués, R.; Khvatkin Petrovsky, N.; Lorenzo Ortega, R.; Gómez-Espinosa Martín, R. Differentiable Deep Learning Surrogate Models Applied to the Optimization of the IFMIF-DONES Facility. Particles 2025, 8, 21. [Google Scholar] [CrossRef]
- Razek, A. Biological and Medical Disturbances Due to Exposure to Fields Emitted by Electromagnetic Energy Devices—A Review. Energies 2022, 15, 4455. [Google Scholar] [CrossRef]
- Laganà, F.; Bibbò, L.; Calcagno, S.; De Carlo, D.; Pullano, S.A.; Pratticò, D.; Angiulli, G. Smart Electronic Device-Based Monitoring of SAR and Temperature Variations in Indoor Human Tissue Interaction. Appl. Sci. 2025, 15, 2439. [Google Scholar] [CrossRef]
- Razek, A. Assessment of a Functional Electromagnetic Compatibility Analysis of Near-Body Medical Devices Subject to Electromagnetic Field Perturbation. Electronics 2023, 12, 4780. [Google Scholar] [CrossRef]
- De Leo, A. Special Issue on Advanced Technologies in Electromagnetic Compatibility. Appl. Sci. 2022, 12, 8975. [Google Scholar] [CrossRef]
- Qiu, Y.; Gao, T.; Smith, B.R. Mechanical deformation and death of circulating tumor cells in the bloodstream. Cancer Metastasis Rev. 2024, 43, 1489–1510. [Google Scholar] [CrossRef] [PubMed]
- Wu, L.; Huang, R.; Zhu, J.; Ma, X. A Dynamic Mechanical Analysis Device for In Vivo Material Characterization of Plantar Soft Tissue. Technologies 2025, 13, 191. [Google Scholar] [CrossRef]
- Vinchurkar, K.; Bukke, S.P.N.; Jain, P.; Bhadoria, J.; Likhariya, M.; Mane, S.; Suryawanshi, M.; Veerabhadrappa, K.V.; Eftekhari, Z.; Onohuean, H. Advances in sustainable biomaterials: Characterizations, and applications in medicine. Discov. Polym. 2025, 2, 2. [Google Scholar] [CrossRef]
- Oh, C.; Kim, Y.M.; Lee, T.; Lee, S.M.; Jung, J.; Bae, H.M.; Kim, C.; Lee, H.J. Patch-type capacitive micromachined ultrasonic transducer for ultrasonic power and data transfer. Microsyst. Nanoeng. 2025, 11, 124. [Google Scholar] [CrossRef]
- Mizna, S.; Arora, S.; Saluja, P.; Das, G.; Alanesi, W.A. An analytic research and review of the literature on practice of artificial intelligence in healthcare. Eur. J. Med. Res. 2025, 30, 382. [Google Scholar] [CrossRef]
- Gowri, V.; Uma, M.; Sethuramalingam, P. Machine learning enabled robot-assisted virtual health monitoring system design and development. Multiscale Multidiscip. Model. Exp. Des. 2024, 7, 2259–2288. [Google Scholar] [CrossRef]
- Gitto, S.; Giuliani, G.; Lasciarrea, A. A Digital Twin System to Enable Better Healthcare Management. In Hybrid Human-AI Collaborative Networks;PRO-VE 2025. IFIP Advances in Information and Communication Technology; Camarinha-Matos, L.M., Ortiz, A., Boucher, X., Lucas Soares, A., Eds.; Springer: Cham, Switzerland, 2026; p. 770. [Google Scholar] [CrossRef]
- Yadav, S; Mondal, J; Saha, M. Systems biology approaches for multi omics integration using artificial intelligence. Academia Biology 2026, 4(1). [Google Scholar] [CrossRef]
- Bartusik-Aebisher, D.; Justin Raj, D.R.; Aebisher, D. Artificial Intelligence in Medical Diagnostics: Foundations, Clinical Applications, and Future Directions. Appl. Sci. 2026, 16, 728. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



