
Submitted:
27 January 2026
Posted:
28 January 2026
You are already at the latest version
Abstract
This article builds on the argument that design for complex interactive systems should shift from creating transactional interactions to ’organizing relational complexity’. Grounded in Karen Barad’s agential realism, we have argued that a designer’s role can benefit from not defining interactions, but to curate the material-discursive conditions under which meaningful relations can emerge. To address the underexplored empirical and temporal dimension of this practice, we conducted a workshop to stage emergent gameplay dynamics and discussions on agential realist anticipation. The workshop featured a custom-designed game where participants built their own controllers to anticipate and adapt to shifting gameplay conditions. The results show how alterations in relational constraints, rather than explicit goals, caused the emergence of distinct, non-predefined gameplay rhythms. Our findings provide empirical grounding of an agential realist interpretation of these dynamics and we argue that a system’s identity lies in its unfolding pattern rather than a final state. Based on the findings we introduce three design principles: Design for relational emergence, Design for re-membering, and Design for emergent patterns. Consequently, we conclude by outlining conceptual specifications for a computational model we are developing, capable of supporting such non-linear emergent dynamics
Keywords:
gameplay dynamics
; agential realism
; design
; human-computer interaction
; complex systems
1. Introduction
Our work situates itself at the intersection of agential realism, emergent gameplay, dynamical interactive systems, and complexity theory.
In the design of complex interactive systems, traditional approaches often rely on linear causality and predefined goals. The prevailing logic suggests that an interaction is a transaction between independent entities, where A leads to B in a predictable chain of events. The interaction is thought of as between distinct entities, where one (the cause) modifies and leaves its mark on the other (the effect).
As systems become increasingly entangled with human agency and material conditions, the transactional view falls short. It fails to capture the emergent dynamics where the result of an interaction is not a fixed output but a continuous process of becoming. The main argument in our previous work is that interaction is not something that happens between independent entities but a process that constitutes the entities themselves. This perspective, taken from Karen Barad’s agential realism [1,2], implies that the designer’s task is not to define an interaction but to create the material-discursive conditions under which both expected and unexpected relations can unfold and interaction can emerge. We call this organizing relational complexity [3]. Our use of the term ’organization’ here is based on Edgar Morin’s work on complexity. Morin suggests a rationality for complexity that resonates deeply with agential realism, that is, organization as a “continually generative and regenerative activity at all levels based on computation, strategic planning, communication, and dialogue.” [4] [p. 128].
From an agential realist perspective, causality is not between isolated entities. The temporality of causality is within phenomena, where the determination of cause and effect is made in a temporary contextual unfolding. Agential intra-actions are the causal enactments in which marks are left on the agencies of observation (the effect) that constitute and reveal specific features of an entity (the cause). Causality is thus not a linear transaction, but a specific materialization of the world resulting from "agential cuts" (contextual reconfigurations) [5]. This also means that agency is not a property possessed by humans alone but an enactment that emerges from the material-discursive arrangement.
what is important about causal intra-actions is that "marks are left on bodies": bodies differentially materialize as particular patterns of the world as a result of the specific cuts and reconfigurings that are enacted. Cause and effect emerge through intra-actions.[2] [p. 176]
Within HCI (Human-Computer Interaction), the "material turn" has also challenged the Cartesian divide between human subjects and material objects. Paul Dourish’s definition of embodied interaction as "the creation, manipulation, and sharing of meaning through engaged interaction with artifacts." [6] [p. 126], is well established and highlights the fact that meaning-making is not a purely cognitive activity. A fine example of trying to rethink relations between humans and things is Morse Things by Wakkary et. al. [7]. Their work emphasizes the entanglement of these entities, suggesting that things "are conditioned by humans and in turn shape what it means to be human" [7] [p. 505]. Another example is Gemeinboeck’s framework for relational-performative aesthetics in human–robot interaction, in which the design focus shifts from designing an agent to exploring the dynamics through which social agencies can emerge between humans and robots [8].
While our prior work established a relational framework, we now add to the framework by concretizing design principles and outlining conceptual conditions for a computational architecture, capable of supporting such non-linear emergent dynamics. The key concepts that we bring from agential realism and our previous analysis include: how anticipation can be seen as a tensional force that emergently shape our disposition [9], and re-membering as the process in which the past is not recalled but actively reconnected and reshaped in the present [10,11]. As anticipation is not a purely cognitive prediction but entangled with the specific spatiotemporal context at hand, we argue that so should it also be in the design of dynamic interactive systems and autonomous agents.
As an empirical basis for our arguments, we will report on and present the results of a workshop that was arranged at a conference (GEM 20251) in conjunction with one of our previous papers [9]. The workshop was arranged to explore agential realist anticipation in relation to game design and how data models and causal behavior models are conceptualized. In that paper, we made a crucial distinction between prediction and anticipation. Unlike prediction, which relies on a causal model to predict an uncertain outcome, anticipation is described as a future-creating, embodied, and situated force operating in a world that is indeterminate, not uncertain. Anticipation is not a passive expectation, but an active affective force of the present that opens up some futures and excludes others. This resonates with Nadin’s vast work on anticipation [12] and approaches in cognitive science such as Varela et. al.’s Embodied mind [13].
2. Materials and Methods
We invited conference attendees to the workshop with a limit of 20 participants. The limit was put in place to be able to cope with the preparation of the material for the workshop and to have a reasonable number of people sharing the same room, having discussions among them, and allowing them to play a game together on a shared screen. A workshop invitation was sent to conference attendees in advance with a statement: "How agential reality shapes our gaming experience", and a question: "What does it take to become a top tier robot vacuum cleaner?". In the end, 10 participants joined the workshop. The empirical material consists of documentation in writing and photos based on observation and discussions during the workshop.
The workshop involved a custom-designed game, as we have argued before that games are clear examples of agential reality [14]. We aimed to capture the essence of agential realism by staging a game where participants became involved in a socio-technical arrangement. The entire context should in some way influence the course of events such as how the participants were organized in the room, interactions with the digital game world, and the participants’ interactions and discussions with each other. In the game, the workshop participants took on the roles of robot vacuum cleaners, and they had to anticipate and adapt to changing relational constraints, leading to distinct emergent gameplay rhythms that were neither explicitly programmed nor strictly predictable. All actions taken by the participants to control their robot vacuum were recorded, allowing us to play back each play session afterward to correlate with our interpretations of our observations. We focused on two things in how the participants expressed themselves verbally and by action:
- 1.
- subjects and agency: how subject/object-relations unfolded and how agency was distributed.
- 2.
- emergent dynamics: how reconfigured relational constraints gave rise to emergent gameplay.
The digital part of the game was developed using Unity (https://unity.com), designed to be projected onto a large enough screen so that all participants could simultaneously play together in the same room. The digital game world consists of three Unity scenes that depict different rooms from a top-down perspective. To the right in the game view is a square play area, and to the left is an overview panel. In the play area, participants control their respective vacuum cleaner, navigate the room, and collect dust. In the overview panel, information about each vacuum cleaner is displayed. Figure 1 shows the three rooms and the overview panels, with robot vacuum cleaners in their starting positions.
The overview panel shows each participant’s vacuum cleaner together with icons representing how much battery is left and how much space is left in the dust bin. Each vacuum cleaner can be identified by different colors as well as their name displayed below them. The naming convention is the following: "Vacuum01", "Vacuum02", ..., "VacuumNN". The ending number (NN) of the name is also displayed on top of each vacuum cleaner in the play area. The names and colors of the different vacuum cleaners stayed the same throughout the workshop. The only exception from this was in Teamplay where only two colors were used based on how the participants were divided into two teams. Below each vacuum cleaner, a counter is displayed showing the current amount of dust collected. At the bottom of the overview panel, a timer counts down, showing how much time is left to play in the current room. In Teamplay, the total score as the accumulated dust for each team member is displayed at the bottom of the overview panel.
In addition, custom-designed circuit boards were created so that participants could assemble their own game controllers from a collection of parts. A main board housing an ESP32 micro controller was designed and programmed using the Arduino library. Figure 2 shows the main board. Six different smaller input boards were created to allow different modes of physical input. Figure 3 shows the input boards. The main board had a limit of four inputs, numbered from 1 to 4.
The main board is powered via USB-C and the smaller boards were powered by connection to it. OSC-messages (Open Sound Control) were sent as UDP-packets from the main board to a computer running the Unity application. A preconfigured router was used as a local wireless LAN for communication between the main boards and the computer. In this way, we could ensure that each main board always had the same IP-address via DHCP. The IP-address was used in a lookup table to give each participant’s controller a number. This is the same number that was used in the previously mentioned naming of the robot vacuums. The number was also printed on the main board for the participants to see.
The input boards were designed to allow for different types of physical input. They were connected to the main board via 3 wires. Input sensors among the six input boards were three push buttons in three different colors (red, green, and blue), one flip switch, one twisting potentiometer, and one sliding potentiometer. To differentiate the buttons and the flip switch, a voltage divider was used with different resistors for each. No differentiation was used between the twisting and the sliding potentiometer.
The input data sent from the main board to the computer was a continuous series of OSC-messages containing information about which controller sent the message and the number and value for each input. The values were floating point numbers between 0 and 1. The potentiometers allowed for an arbitrary value within the range, the flip switch was 0 or 1, and the push buttons were red: 0.33; green: 0.66; and blue: 1.
An overview of the technical setup is shown in Figure 4.
2.1. Workshop implementation
The workshop was divided into two sections, a preparation section and a play section.
2.1.1. Preparation
In the first section, the purpose of the workshop was introduced using our paper and its arguments. Since the workshop was arranged before our paper was presented at the conference, we gave a summary of our research study and the arguments in the paper. After that, the participants were introduced to the material we had prepared and the basic principles of the game.
The participants were initially informed:
- You are about to take on the role of robot vacuum cleaner.
- You have a controller board – this is the brain of your vacuum. There is a number on the back of the board, remember your number.
-
You will select four out of six input types. These inputs give you the following abilities, but you will not know until the game starts which input number is tied to what action.
- -
- Drive forward
- -
- Turn left
- -
- Turn right
- -
- Vacuum
- You can view the status of your vacuum cleaner in the overview panel on the left. You have a battery that you need to manage. Using all inputs at once will drain your battery faster.
- You have a dust bag that will fill up after a while when vacuuming.
- To charge your battery and empty your dust bag, you need to go to a charging station (Note: only one vacuum cleaner can be charged at a time).
- If you run out of battery, your vacuum cleaner will stop. Then, you will need to be pushed to a charging station.
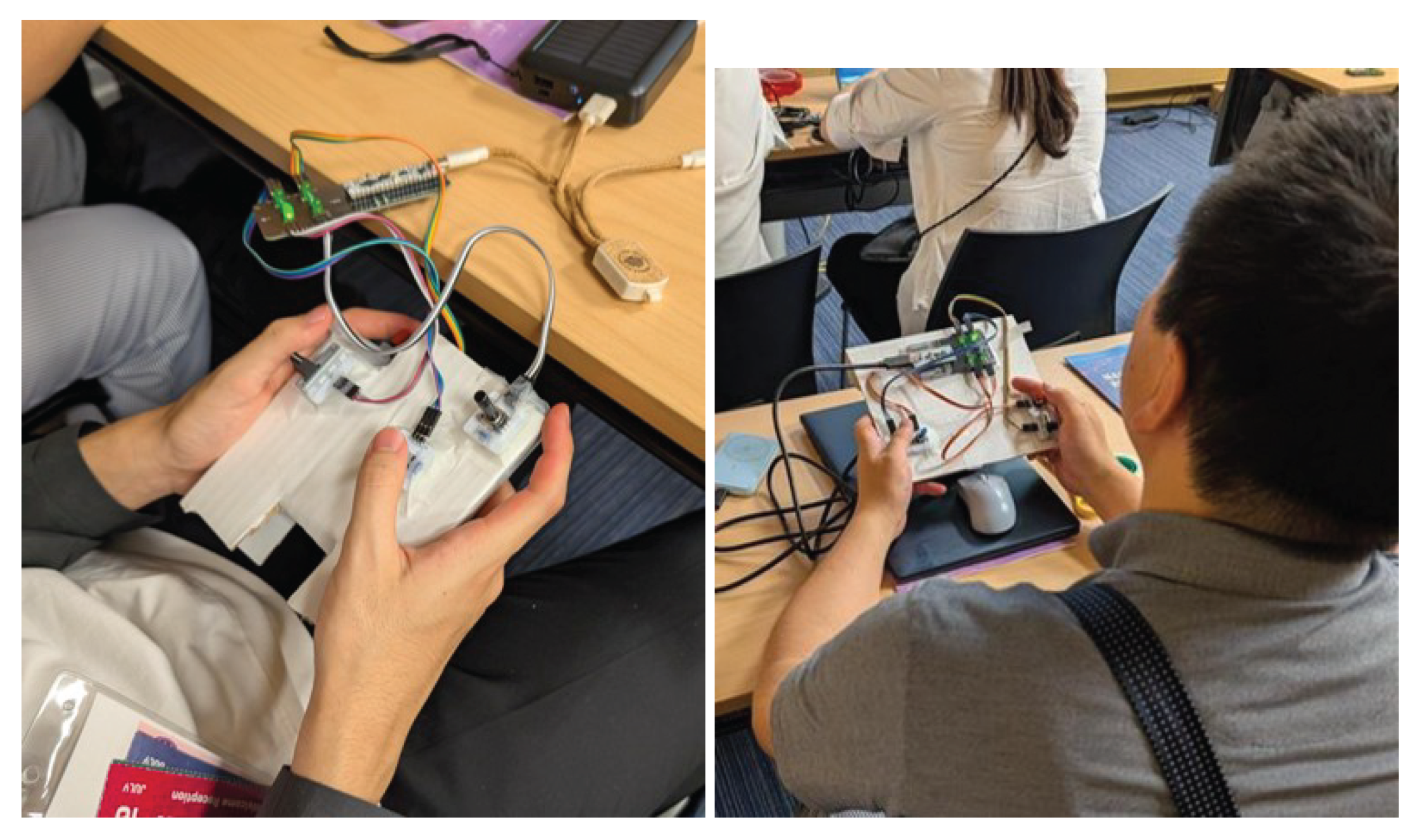
The participants then chose four input boards and connected them to their main board. They were also provided with cardboard, scissors, adhesive tape, and double-sided adhesive tape to build a controller. They could cut and put together their controller to their liking. They were free to attach the mainboard and the input boards to the cardboard in whatever arrangement they wanted, restricted only by the length of the connection wires. Figure 5 shows two examples of built controllers.
Before continuing, we held a discussion on the participants’ anticipations so far. Anticipations at this stage were articulated with verbs in relation to their newly built controllers or to the presented robot actions, such as twist, turn, vacuum, press. The participants also expressed an eagerness to try their controllers. At this point, the robot vacuums were not referred to as a subject. The subjects were the participants themselves, expressing agency in relation to their newly built controllers.
2.1.2. Play
In the play section, the participants played the game together. First, they got to play the Lobby-room, then the Living-room, and last the Garage-room (see Figure 1). In between each room, a discussion was held to elaborate on the participants experience ans how anticipations changed. In the following part of this section, we present both the observed results and our interpretations.
The Lobby room: The play section started by letting the participants get to know their controllers and vacuum cleaners in the Lobby room. After a short period of confusion about things like what input does what action, how to identify ones vacuum, and how to charge; the participants got to know their controller and how to go around the room vacuuming. The also found out that running out of battery really ended up in their vacuum turning lifeless. At this point, they started pushing each other to a charging station. We spent about 15-20 minutes in the Lobby room to really allow everyone to get a feel for the basics of the game and their controllers.
Before continuing, we had another short discussion on anticipations. At this point, anticipations were expressed by new verbs, such as exploring, pushing (others to help), searching (for one’s robot), and charging.
Based on the initial verbs used, the physical physical controllers had started to become (at least partly) embodied. One participant said: "I think the fact that I built my own controller made this more immersive".
The Living room: When we changed to the living room, the participants were told to compete against each other to see who could collect the most dust in 5 minutes. We likened this to FFA-play (Free For All), a term often used for competitions open to everyone without restrictions. Since this room added furniture that could be bumped into and even go under, losing sight of the on-screen robot vacuum, we let the participants try out the new room for about 10 minutes.
Again, a short discussion was held. Anticipations were expressed by yet new verbs such as emptying, dusting, and queuing (to charge). During this play mode, participants had started to refer to their vacuum cleaners as "I", now with quotes as "I ran out of battery", "can someone please help to push me to a charging station".
At this point, the expression of subjects and agency was twofold. The participants were mostly attributing the agency to themselves with their robot vacuum as objects with quotes such as "which is my robot", "my robot keeps spinning left", or "my robot ran out of battery". They were the cleaners with an external entity (the robot vacuum) as a tool to their help. However, there were a few examples of referring to oneself with "I ran out of battery". Referring to the other players was done, at points, based on their physical location in the room, asking a neighbor for help. This was met with quotes such "I will help to push you to a charging station. Where are you? What color?". Agency thus was partly attributed to an entangled subject including both human and on-screen robot vacuum. The physical controller became a bridge for the entanglement. While not all utterances aligned uniformly, such shifts in agency attribution recurred across participants and play sessions, indicating a pattern rather than isolated linguistic events.
The social dynamic of pushing each other to a charging station was not an explicit game rule, there was no programmed reward for it. However, we will not label this as an unexpected emergent gameplay due to the fact that we initially informed the participants about the possibility to push one another to charge.
The expression of the playing subject was now articulated more consistently as an entangled subject. The agencies that performed the actions had become more of an inseparable assemblage of human, on-screen robot, and controller.
Emergent gameplay was observed and articulated such as having to queue to charge. And, to our surprise, although competitive, there were several helpful participants that pushed competitors to a charging station.
The Garage room: In the final room played, the participants were randomly divided into two teams. This meant that although the team’s players were grouped together in the digital world, they were not necessarily so in the physical room. A participant sitting next to you was not necessarily a team-mate, as we did not change physical seats based on the random division into teams.
The teams were then told to compete team against team, still with the goal of collecting the most dust in 5 minutes. The teams scores (accumulated dust) were displayed and updated in real-time so that the participants could track which team was in the lead. After a first round of 5 minutes, the participants wanted to go again for another 5 minutes of team play.
A final discussion was held. Several interesting topics were raised. By that time, no one referred to their vacuum as a separate entity anymore. Even more verbs were used, out of which blocking, hindering, and attacking stood out. The teams tried to hinder each other from getting onto a charging station or blocking by staying in one. This made the teams to try to attack to push away the opponents to free a charging station. A large part of the room was never visited.
Observing the social dynamic among the participants, it had now shifted from looking and talking to the neighbor, into more loud talking at the screen with quotes as "Number 9! Try to block the other charging station". After all, they only knew their team mates based on the robot vacuum name on the screen.
In the end, one of the participants concluded: "Dust suddenly had no meaning anymore, we forgot about dusting". Emerging from teamplay was thus not only a new soial structure and a new gameplay strategy, but an emergent new competitive goal, it was all about hindering, blocking, and attacking. The participants had now become entangled with the context to a degree where they talked to each other through the screen with the name of their respective robot vacuum.
The empirical material was analyzed through iterative interpretive analysis rather than formal coding or quantification. Observations, utterances, and recorded gameplay sessions were reviewed collaboratively by the authors to identify recurrent patterns of agency attribution, relational reconfiguration, and changes in gameplay dynamics. The analysis aimed to achieve interpretive coherence between observed behavior, participant discourse, and the theoretical framework of agential realism, rather than exhaustively categorizing all possible interpretations. Alternative readings were discussed during the analysis to ensure that the reported interpretations were grounded in recurring empirical patterns rather than isolated events.
3. Result and Discussion
We deliberately divided the workshop into two distinct sections, inviting participants to actively take part in the creation of the initial conditions. As we argued in our previous work, using a Pelle Ehn’s “Design Things” [15], our objective was to create a performative staging of a situation. Instead of creating a finished object or pre-though experience for a participant, the goal became the organizing of relational complexity, a Thing where relations and interactions can emerge. The aim of such a design goal was to create space for a plethora of possible unfolding relations during gameplay.
Findings from the workshop implies an extension to our framework by exploring how design can curate the conditions for agential cuts, rather than defining rigid transactional interaction. A design practice that adheres to this needs also a novel temporal logic, and the system it designs must likewise use a novel temporality in contrast to linear causal time moving from . We therefore propose a different view of emergence, grounded in Agential realism and Edgar Morin’s complexity theory.
Traditional project models are linear and teleological, as they move towards a predefined goal. But with a project model that aims at the organizing of relational complexity, based on agential realism and the Morinian rationale for organization as a constantly generative and regenerative activity, the object and evaluation of design change. The focus shifts from creating ready-made artifacts for specific users and use cases to shaping the dynamic and material conditions of an entire socio-technical arrangement. The goal is not to predetermine and control outcomes, but to cultivate a rich scope of evolving relations.
In game design theory, emergence is typically understood as complex behaviors that arise from the interaction of formal rules (e.g., [16,17]). Although these theories acknowledge that designers cannot completely control the final experience, they often treat the system as a closed loop of logic. In addition, Gaver et al.’s concept of ambiguity [18] points to the fact that a lack of prescriptive meaning allows users to construct their own narratives.
However, we argue that emergence is not just about the lack of full control of a user experience or about interpretation. Emergence is an ontological shift of a system’s components and their relations. The workshop showed how a game controller can transform from a tool of cleaning to an instrument of aggression based on the unfolding history of the system. This happened when participants after a while embodied an entangled subject/object agency that before was attributed to an external subject (the robot vacuum cleaner). Much like Leibovitz’s profound realization after playing Legend of Zelda: Twilight Princess for several hours:
I was not truly a subject, at least not in the pure Cartesian sense; I was no thought and all extension [19] [p. 45]. [...] Finally, two hours after a muscle memory of sorts first became apparent in my play, I used the one word to describe Link that I had previously consciously avoided: I [19] [p. 49].
We argue that a temporality based on agential realism can be characterized by three interconnected properties. Recursive reconfiguration: time moves in loops or turns, where each turn revisits previous states but from a new position, with new information and new intertwining. This means that the past is not fixed, but can constantly be reshaped and given new meaning by current intra-actions. Processual emergence: the value and result of a process is not a final, stable state, but the ongoing process itself. The focus shifts from product to process, from being to becoming. The identity of a system lies in its patterns of state change (rhythms). Non-linear dynamics: the state of the system at a given time is not solely caused by the immediately preceding state (as in a Markov chain). Instead, it is an expression of the entire history of the system and the current organization of its relations. Our analysis of the workshop gives empirical evidence of these properties. By selecting four parts from the collection of six and building their own controller based on their limited knowledge about the game, the participants performed a material-discursive act that directly affected future agency in the game. Their anticipations thus became an initial force that took part in shaping the emergent relational configurations.
The property of Non-linear dynamics became dramatically evident when the conditions for the game changed. The state of the system was not a linear causal result of the game rules but an expression of the complete current organization of relations in the gameplay context. In FFA-mode, despite the goal being individual (i.e. collecting the most dust), unexpected social and exploratory relations emerged. Then in Team-mode, a simple rearrangement of the relations where the players competed in two teams against each other, the previous social structure collapsed. The social structure re-emerged with new antagonistic relations ("block", "hinder", and "attack"). And the most significant emergent change of relations occurred in Team-mode when the original competitive goal was forgotten.
The property of Recursive reconfiguration was made explicit when analyzing how the participants’ past decisions were reshaped by the present. The first task of the participants was to build a controller based on their limited understanding of the game and an anticipation of what it would be like to take on the role of a robot vacuum cleaner. This act created the start of an irrevocable historicity. Initially, players used a vocabulary tied to their controllers, the physical materiality of buttons and potentiometers (“press”, "push", “twist”, "turn", "slide"). As they then began to play, this material history became recursively reconfigured; the past was not fixed but given new meaning by current intra-actions. The player agencies in FFA-mode that used the controller to "explore" and "help" emerged differently in Team-mode, where the controller instead was used to "block", "hinder", and "attack". The original materiality of the controller was constant, but its emergent use and meaning were dynamically re-configured as the history of the system unfolded.
The last property Processual emergence characterized the three distinct play modes. The identity of the system did not lie in predefined rules or in an optimal gameplay state, but in its unfolding patterns. The play modes can all be thought of as different rhythms of the game. The initial rhythm was based on a relation with the on-screen robot as a separate entity, causing it to drive, turn, charge, and vacuum. Then, the FFA-rhythm took over, now with a more diffuse separation of the on-screen robot as a separate entity. The robot vacuum cleaners now started to emerge as a socio-technical arrangement of physical input sensors, game rules, and human players – busy to explore, help, push, and gathering dust. Finally, the Team-rhythm emerged as a quite impassioned rhythm. Controllers now fully embodied, the robot vacuum cleaners took on the other team by hindering, blocking, and attacking; the original goal suppressed.
These rhythms were not explicitly designed; they emerged from staged conditions and organizational reconfigurations. Importantly, emergence here does not imply the absence of rules or prior instruction, but refers to how the salience, meaning, and enacted relevance of these rules shifted over time through the unfolding relational configuration of the system. The rhythms show that there is true value in design (and participant experience) that lay not in achieving the specified goal (collecting dust), but in the rich and unexpected variety of the emergent social-material dynamics.
The results of the workshop provide empirical support for an agential realist interpretation of reality. It shows that even a minimal change in relational conditions can cause a cascade of changes that completely change the purpose and meaning of a system. Specifying a goal (e.g. gathering dust) is no guaranty that that goal will be relevant to the agencies that actually unfold, and thus make up the system. Adopting agential realism compels a fundamental re-evaluation of what constitutes a ’successful’ interactive system. Instead of measuring efficiency, accuracy, or task completion, this framework encourages the development of methods to value the relational complexity of the emergent rhythms a system produces.
4. Conclusions
The emergent rhythms of gameplay observed in our workshop reveal a gap in transactional interaction design and linear computational models. By analyzing how these patterns emerge, we lay the foundation for a novel approach to design systems not to solve tasks but to embody the rhythmic, re-membering nature of agential reality. Whether explicit state machines or goal-oriented optimization algorithms, they rely on linear causality and predefined objectives. In such models, an interaction is treated as a transaction where input A is processed to achieve goal B . If we were to model our workshop using this logic, the emergent shift from "cleaning" to "fighting" would be classified as a failure. A system optimized for dust collection would view the participants’ behavior in Team-mode not as a meaningful relational reconfiguration, but as noise or error deviating from the ground truth. But, our analysis shows that this deviation was the moment where the system became most meaningful to the participants, even making them forget the original goal. The emergent behavior was not a bug; it was a new, stable rhythm of becoming. Current architectures lack the capacity to value such shifts; they strive for convergence on pre-set goals, whereas agential reality advocates a capacity for divergence into new, meaningful patterns.
To that end, we propose three design principles: Design for Relational Emergence, Design for Re-membering, and Design for Emergent Patterns.
4.1. Design Principles
- Design for relational emergence: The first principle shifts the object of design from delimiting a system’s final form or function to creating conditions for a rich scope of possibilities. This means organizing the initial material-discursive constraints through which new relations between agents (human and nonhuman) will emerge and existing relations can be reconfigured. The role of the designer is to stage and curate these conditions for both meaningful and unexpected relations to unfold rather than trying to predefine specific interactions.
- Design for re-membering: The second principle addresses temporality and memory. Barad’s "re-membering" (with the hyphen) is crucial here. It is not a strict reproduction of the past, but a re-configuration of past material traces into present configurations. From an agential realist perspective, the history of a system is not a passive data log; the history should be an active part of its current and forthcoming configurations. This principle calls for designing systems whose "past" gets inscribed in their structure and which actively shapes their future organization. Parts cannot be separated from the whole, and their properties are the result of their shared historicity. The role of the designer is to create mechanisms for how a system can re-member by structurally changing its organization, thereby giving rise to a unique reconfiguring development trajectory.
- Design for emergent patterns: The third principle is about the expression of the dynamics of a system. In traditional design, system dynamics is based on specified behaviors as predictable causal chains of events (i.e., "if User does X, the System responds with Y"). Often, a User and the System are separate entities. Designing for emergent patterns instead means expressing the dynamics on temporal patterns in the overall system (in which the user is part). Rather than repetitive predictable transactions, the designer’s goal is a rich scope of recognizable but not strictly repetitive or predictive behavioral patterns. The patterns can be understood as the rhythms of the system, patterns of intra-action that characterize the system’s ongoing becoming.
Adopting our design principles has implications for how we design and understand the computational architectures that underpin interactive systems. Our empirical results show that the "meaning" of the gameplay was not found in a static state (e.g., the amount of dust collected) but in the shifting rhythms of the relations (e.g., exploring vs. attacking). This requires a shift in computational values: from stability to variation, from product to process. A computational architecture suitable for this cannot simply be an optimization machine that minimizes error against a ground truth. To support these principles, we need to shift our computational values from homeostasis to homeorhesis. Homeostasis refers to a system’s ability to maintain a stable internal state despite external changes (e.g., a thermostat returning to a set temperature). Homeorhesis, in contrast, refers to a system’s ability to maintain a stable trajectory or rhythm of change. In our workshop, the change in gameplay dynamic to "blocking and attacking" was a homeorhetic shift; the system did not break but rather settled into a new rhythm. We argue that dynamic interactive systems should not just correct deviations to return to a status quo (homeostasis). Instead, they must be capable of an affective attunement, resonating with the changing relational context to temporarily stabilize within new emerging trajectories (homeorhesis).
This proposal should be understood as a theoretical extrapolation grounded in the observed processual and temporal characteristics of the system, rather than as a direct empirical validation of a specific computational model. The proposal points towards a specific class of computational architecture. To enable recursive reconfiguration and non-linear dynamics, we cannot rely on architectures that treat memory as a static storage of past data. We need a computational architecture where the past actively echoes in the present, just as the physical controller built in the past constrained and shaped the "fighting" agency in the present. In our continuing work, we are exploring Reservoir Computing (RC) [20,21] and non-linear dynamical systems [22,23] as one promising computational direction that is conceptually aligned with the empirical dynamics observed in the workshop. RC operate on principles of high-dimensional dynamic memory and non-linear mapping, allowing them to embody the "rhythmic" and "re-membering" nature of agential reality rather than simply processing algorithmic logic. By organizing relational complexity through such models, we aim to move towards systems that do not just interact with users, but truly become with them.
Author Contributions
Conceptualization, L.P. ; methodology, L.P.; software, L.P; validation, S.K. ; data curation, L.P. and Y.Z; writing—original draft preparation, L.P.; writing—review and editing, S.K., and Y.Z.
Funding
This research received no external funding.
Institutional Review Board Statement
The authors declare that this research was conducted in accordance with the Swedish Act concerning the Ethical Review of Research Involving Humans (2003:460). The study did not involve physical interventions on research subjects, methods intended to cause physical or psychological harm, or the processing of sensitive personal data. All participants were informed about the purpose of the workshop and their voluntary participation was ensured during registration for the workshop. No identifiable personal information was collected or revealed to ensure the integrity of the participants.
Informed Consent Statement
All workshop participants were informed in advance about the workshop and their voluntary participation was ensured during registration for the workshop. Identifiable information was not stored after the workshop registration closed to ensure their personal integrity.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| AI | Artificial Intelligence |
| HCI | Human-Computer Interaction |
| OSC | Open Sound Control |
| USB | Universal Serial Bus |
References
- Barad, K. Getting Real: Technoscientific Practices and the Materialization of Reality. Differences: A Journal of Feminist Cultural Studies 1998, 10, 87–128. [Google Scholar] [CrossRef]
- Barad, K. Meeting the Universe Halfway: Quantum Physics and the Entanglement of Matter and Meaning; Duke University Press, 2007. [Google Scholar]
- de Petris, L.; Khatibi, S. Organizing Relational Complexity—Design of Interactive Complex Systems. Multimodal Technologies and Interaction 2025, 9. [Google Scholar] [CrossRef]
- The Challenge of Complexity: Essays by Edgar Morin; Heath-Carpentier, A., Ed.; Liverpool University Press, 2023. [Google Scholar] [CrossRef]
- Barad, K. Posthumanist Performativity: Toward an Understanding of How Matter Comes to Matter. Signs: Journal of Women in Culture and Society 2003, 28, 801–831. [Google Scholar] [CrossRef]
- Dourish, P. Where the Action Is: The Foundations of Embodied Interaction; The MIT Press, 2001. [Google Scholar] [CrossRef]
- Wakkary, R.; Oogjes, D.; Hauser, S.; Lin, H.W.; Cao, C.; Ma, L.; Duel, T. Morse Things: A Design Inquiry into the Gap Between Things and Us. In Proceedings of the Conference on Designing Interactive Systems, 2017; pp. 503–514. [Google Scholar]
- Gemeinboeck, P. The Aesthetics of Encounter: A Relational-Performative Design Approach to Human-Robot Interaction. Frontiers in Robotics and AI 2021, 7, 577900. [Google Scholar] [CrossRef] [PubMed]
- de Petris, L.; Gullbrandson, F.; Falk, A.; Zhou, Y.; Khatibi, S. Agential RealistAnticipation. In Proceedings of the Proceedings of IEEE Gaming, Entertainment and Media (GEM 2025), 2025. [Google Scholar]
- Nadin, M. Anticipation and computation: Is anticipatory computing possible? In Anticipation across disciplines; Springer, 2015; pp. 283–339. [Google Scholar]
- Barad, K. Transmaterialities: Trans*/matter/realities and queer political imaginings. GLQ: A Journal of Lesbian and Gay Studies 2015, 21, 387–422. [Google Scholar] [CrossRef]
- Nadin, M. Anticipation and medicine; Springer, 2017. [Google Scholar]
- Varela, F.J.; Thompson, E.; Rosch, E. The embodied mind, revised edition: Cognitive science and human experience; MIT press, 2017. [Google Scholar]
- de Petris, L.; Falk, A. Anticipating Agency - a playful shift from uncertainty to indeterminacy. In Proceedings of the Proceedings of the 2nd International Conference on Anticipation, 2017. [Google Scholar]
- Ehn, P. Participation in Design Things. In Proceedings of the Proceedings of the Tenth Anniversary Conference on Participatory Design, 2008; pp. 92–101. [Google Scholar]
- Tekinbas, K.S.; Zimmerman, E. Rules of play: Game design fundamentals; MIT press, 2003. [Google Scholar]
- Juul, J. Half-real: Video games between real rules and fictional worlds; MIT press, 2011. [Google Scholar]
- Gaver, W.W.; Beaver, J.; Benford, S. Ambiguity as a resource for design. In Proceedings of the Proceedings of the SIGCHI conference on Human factors in computing systems, 2003; pp. 233–240. [Google Scholar]
- Leibovitz, L. God in the machine: Video games as spiritual pursuit; Templeton Foundation Press, 2014. [Google Scholar]
- Lukoševičius, M.; Jaeger, H. Reservoir computing approaches to recurrent neural network training. Computer Science Review 2009, 3, 127–149. [Google Scholar] [CrossRef]
- Jaeger, H. The “echo state” approach to analysing and training recurrent neural networks-with an erratum note. Bonn, Germany: German national research center for information technology gmd technical report 2001, 148, 13. [Google Scholar]
- Lotka, A.J. Elements of Physical Biology; Williams & Wilkins Co.: Baltimore, 1925. [Google Scholar]
- Volterra, V. Variazioni e fluttuazioni del numero d’individui in specie animali conviventi. Memorie della Reale Accademia Nazionale dei Lincei 1926, 2, 31–113. [Google Scholar]
| 1 | IEEE Games, entertainment, and Media Conference 2025 - https://ieeexplore.ieee.org/xpl/conhome/11155221/proceeding
|
Figure 1.
Three Unity scenes (rooms) were designed for the game: (a) The Lobby: an empty room with only two charging stations. This room was used to get to know one’s controller and how the basic game mechanics worked. (b) Living room: a furnished room resembling a living room. Furniture became obstacles and vacuum cleaners could go out of view when under a table. This room was used in FFA-play. (c) Garage: a furnished room resembling a disordered garage. This room was used in Teamplay.
Figure 1.
Three Unity scenes (rooms) were designed for the game: (a) The Lobby: an empty room with only two charging stations. This room was used to get to know one’s controller and how the basic game mechanics worked. (b) Living room: a furnished room resembling a living room. Furniture became obstacles and vacuum cleaners could go out of view when under a table. This room was used in FFA-play. (c) Garage: a furnished room resembling a disordered garage. This room was used in Teamplay.
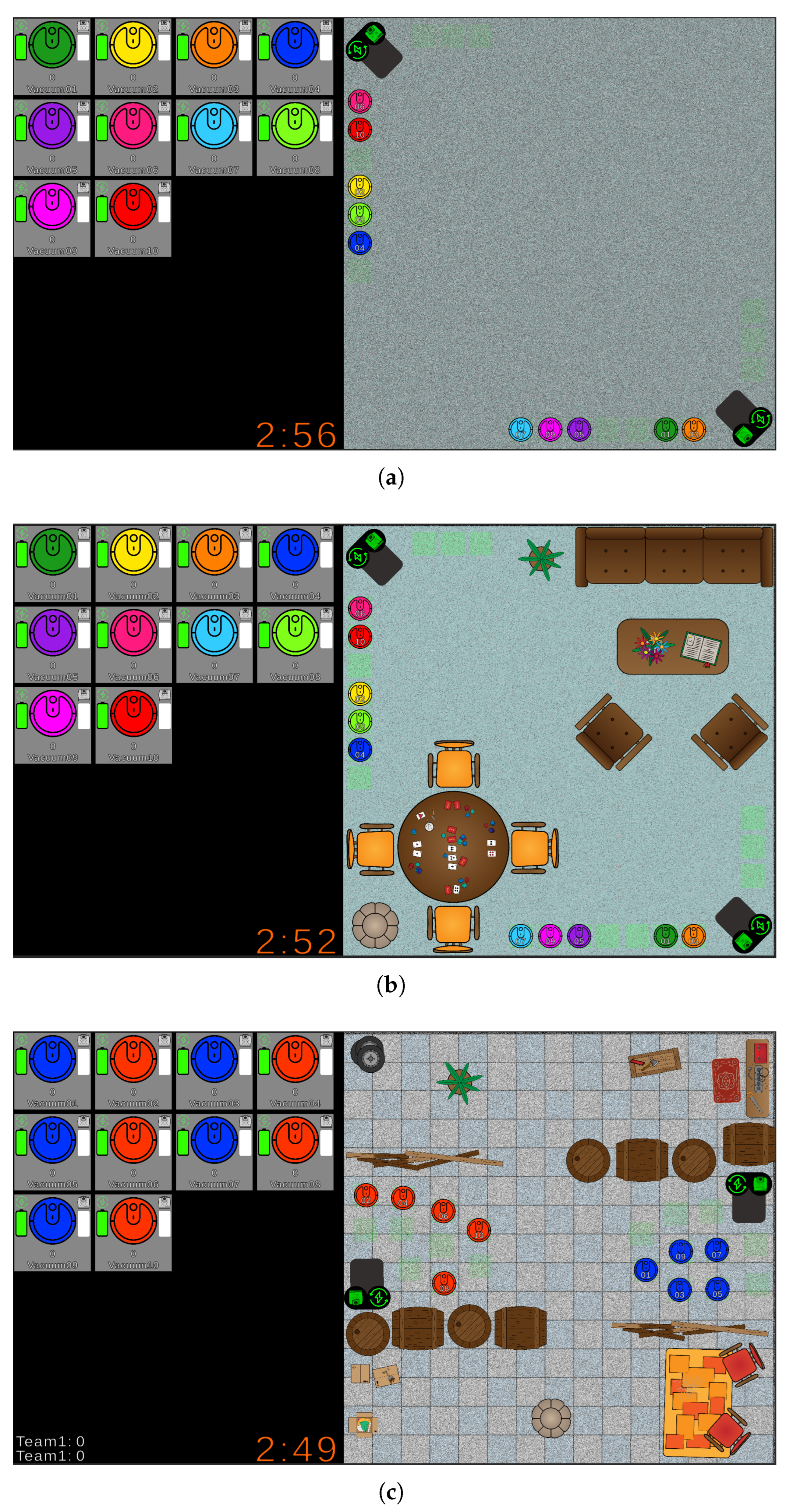
Figure 2.
The main board housing an ESP32 micro controller. Input pins numbered 1-4. A led indicating when the corresponding input is active. The board is powered via USB-C.
Figure 2.
The main board housing an ESP32 micro controller. Input pins numbered 1-4. A led indicating when the corresponding input is active. The board is powered via USB-C.
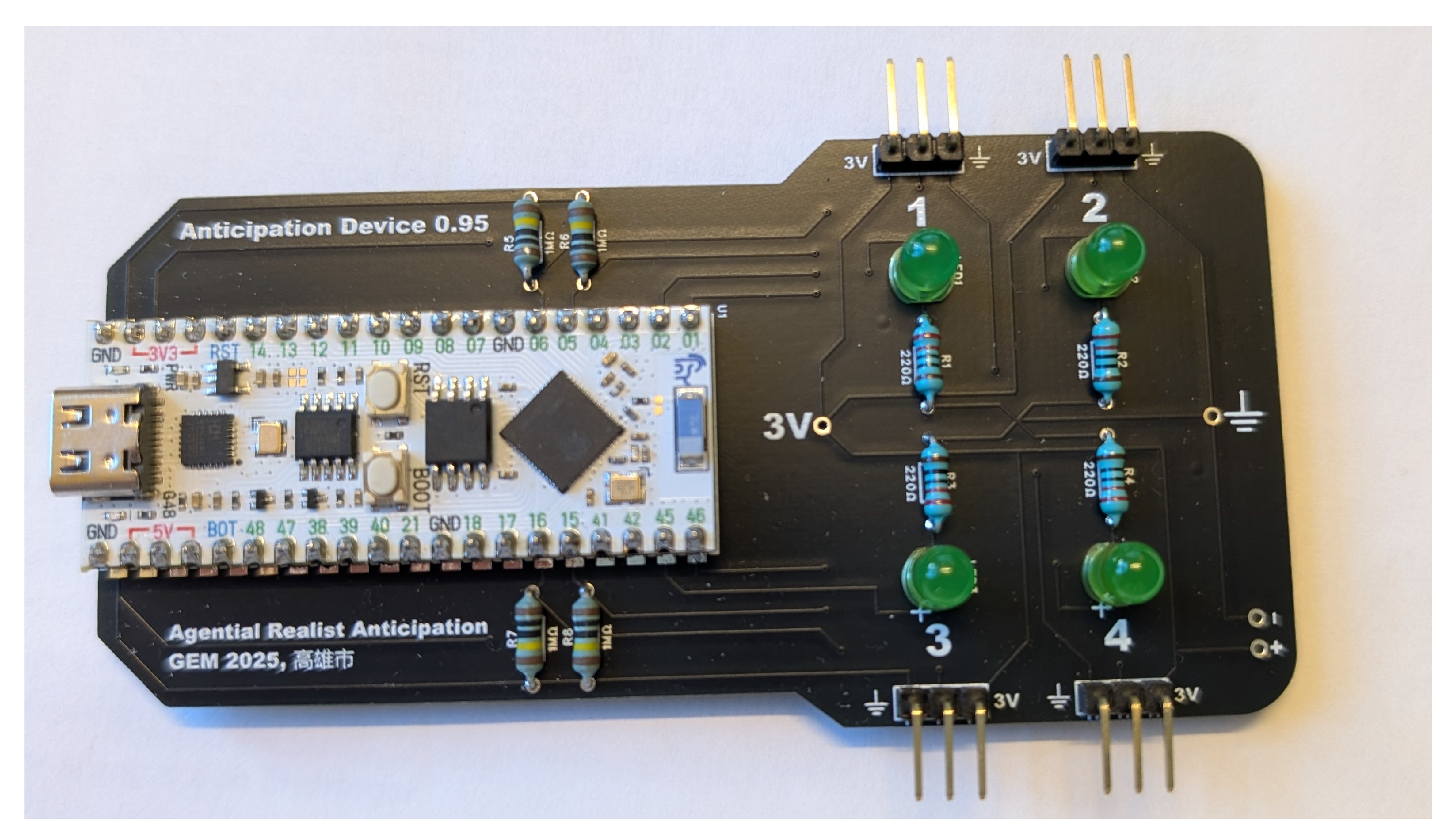
Figure 3.
The six variants of input boards. From left to right: push buttons (red, green, and blue), flip switch, sliding potentiometer, and twisting potentiometer.
Figure 3.
The six variants of input boards. From left to right: push buttons (red, green, and blue), flip switch, sliding potentiometer, and twisting potentiometer.
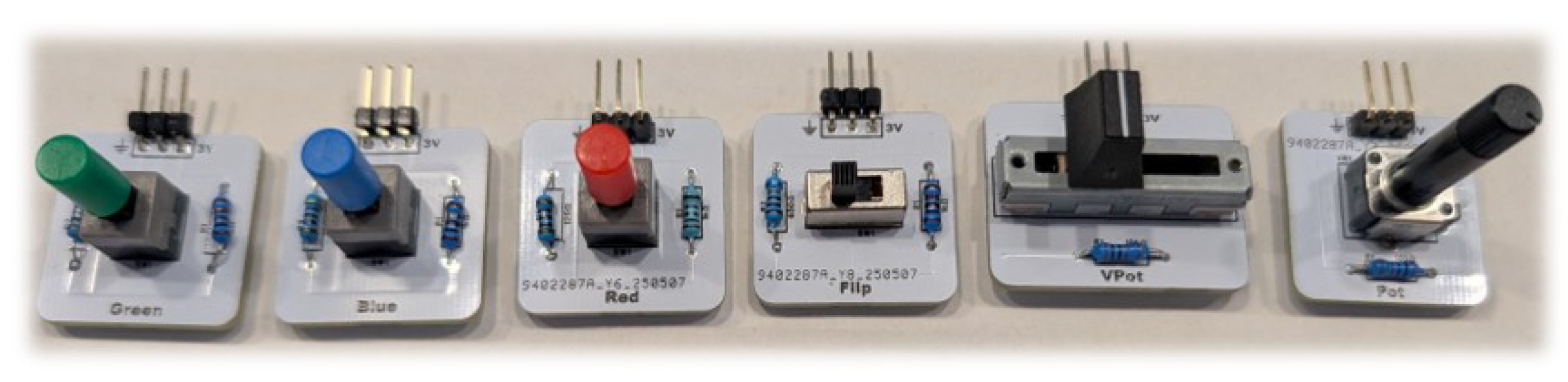
Figure 4.
A system overview. UDP-packets containing OSC-messages was sent over WiFi and routed through Ethernet to a computer running Unity. The game view from Unity was projected onto a large screen.
Figure 4.
A system overview. UDP-packets containing OSC-messages was sent over WiFi and routed through Ethernet to a computer running Unity. The game view from Unity was projected onto a large screen.
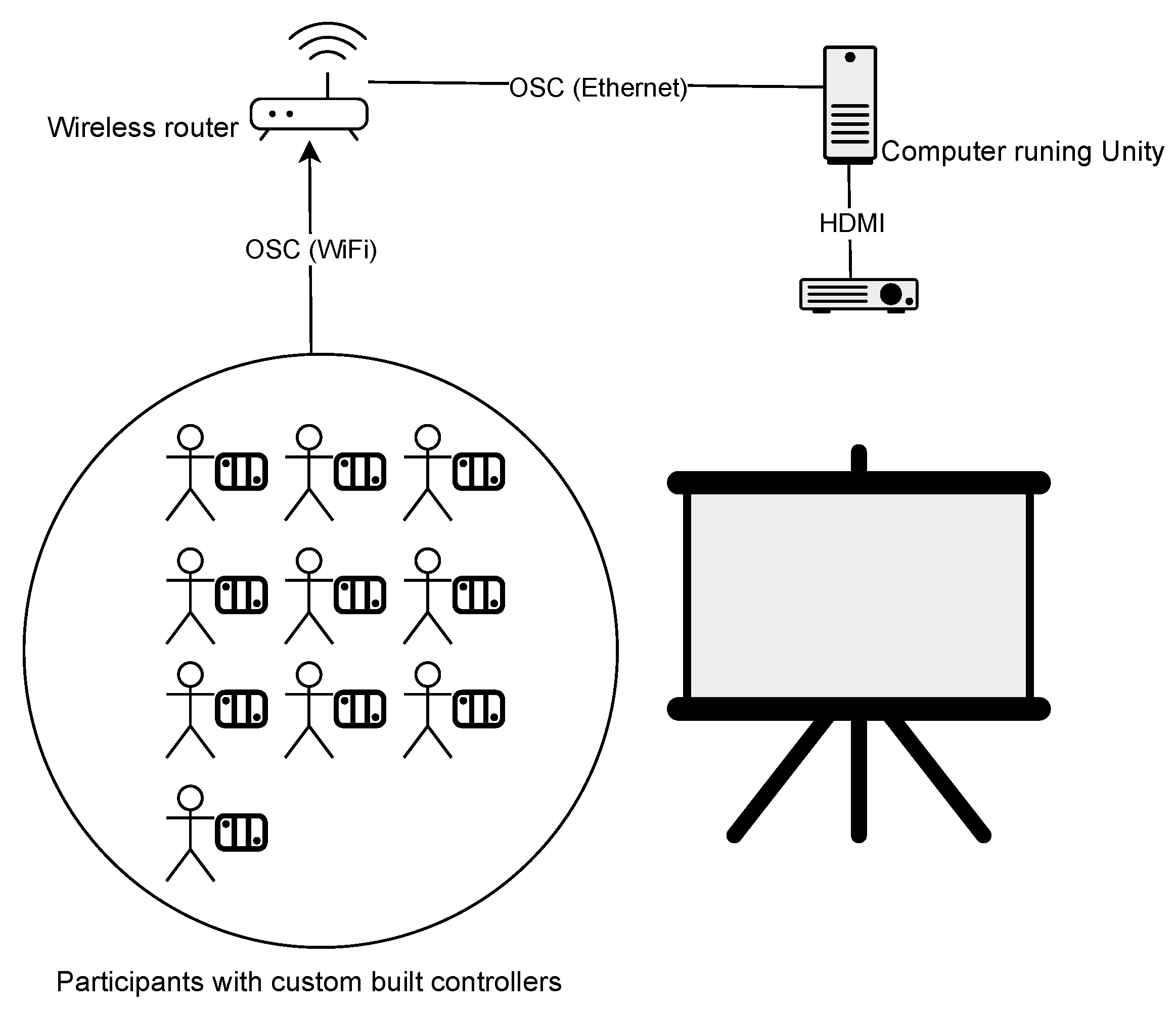
Figure 5.
Two of the controllers built. The controller could be powered by a computer, a mobile phone, or a charging adapter.
Figure 5.
Two of the controllers built. The controller could be powered by a computer, a mobile phone, or a charging adapter.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



