
Submitted:
21 January 2026
Posted:
22 January 2026
You are already at the latest version
Abstract
This paper investigates the final coalgebra for the endofunctor \( F(X) = \mathbb{Z}_3 \times X^3 \) on the category Z3-Set of sets with a Z3-action. We call the resulting F-coalgebras Helical Triadic Coalgebras (HTCs). The factor Z3 records an observable phase that makes distinct cyclic positions distinguishable. We develop the notion of Z3-bisimulation, which generalizes standard bisimulation by allowing cyclic shifts. Our main results concern a natural HTC structure on the srs lattice (Laves graph). The canonical morphism from the srs coalgebra S to the final coalgebra Ω is not injective: translations induce a bisimulation collapsing S onto a 12-element quotient \( \mathcal{Q} \cong K_4 \times \mathbb{Z}_3 \). The \( V_4 \)-symmetry of srs further collapses Q onto a 3-element image I. A symmetry analysis reveals that I is symmetric while Ω is not. We also define orbital invariants (binding index, degeneracy, multiplicity) and establish that every regular coalgebra is chiral. Finally, we prove that among sub-coalgebras of the final coalgebra, symmetry and connectivity alone characterize srs uniquely (up to chirality). These results bridge coalgebraic methods with graph theory and crystallography.
Keywords:
final coalgebra
; helical triadic coalgebra
; Z3-bisimulation
; Z3-action
; srs lattice
; quotient coalgebra
; orbital invariants
; symmetry
; chirality
MSC: 18C15 (Coalgebras); 68Q85 (Bisimulation); 05C25 (Graphs and groups); 52C99 (Discrete geometry)
1. Introduction
The theory of coalgebras provides a categorical framework for the study of state-based systems and infinite data structures [7,13]. Given an endofunctor , an F-coalgebra is an object X of together with a morphism assigning to each state its observable structure. The final coalgebra, when it exists, serves as a universal domain: every coalgebra admits a unique morphism into it, and two states are identified if and only if they are standard bisimilar (behaviorally equivalent in the categorical sense).
Final coalgebras for polynomial functors on are well understood through Adámek’s theorem and Lambek’s lemma. However, the situation becomes richer when we work in categories with additional structure. In this paper, we investigate the functor on the category of sets equipped with a -action. The functor includes an observable phase component in , ensuring that cyclic positions remain distinguishable in the final coalgebra.
The main contributions are:
- 1.
- An adaptation of bisimulation to the cyclic structure: -bisimulation (Section 4).
- 2.
- An axiomatic definition of Helical Triadic Coalgebras (Section 5), including a self-similarity theorem showing that exhibits fractal structure (Section 5.4), and a natural such structure on the srs lattice, a classical 3-regular graph from crystallography (Section 6), with a local self-similarity theorem proving that every vertex generates the entire coalgebra (Section 6.4).
- 3.
- A factorization theorem: the canonical morphism from the srs coalgebra to the final coalgebra factors through a 12-element quotient , which further collapses onto a 3-element image (Sections 7 and 8)).
- 4.
- A symmetry dichotomy: the image is symmetric while the final coalgebra is not; an intrinsic criterion for symmetry follows from orbital invariants (Section 10).
- 5.
- A chirality theorem: every regular coalgebra is chiral (Section 9).
- 6.
- A strong uniqueness theorem: under natural axioms capturing “geometric” HTCs (regularity, symmetry, periodicity, connectivity, maximality), the srs lattice is the unique realization, up to enantiomorphism (Section 11). Crucially, symmetry is the only genuine external constraint: regularity follows from symmetry (12), periodicity follows from symmetry (16), while all other properties derive from the functor F itself.
Regarding novelty: the existence and coinduction framework are classical [1,9,13], while the equivariant specialization to and the notion of -bisimulation are new to this setting. The factorization and the symmetry/chirality consequences are original contributions. They refine classical srs and covering-space descriptions [4,15] by tracking cyclic phase data. These results identify a concrete obstruction to symmetry in regular coalgebras, motivating the open problems in Section 12.
These results link coalgebraic methods with several classical areas: covering space theory (the srs lattice is the maximal abelian cover of ), crystallographic topology (space group ), and combinatorial graph theory (3-regular graphs with girth 10).
The paper proceeds as follows. Section 2 discusses prior work. Section 3 recalls the categorical framework. Section 4 develops -bisimulation. Section 5 defines the Helical Triadic Coalgebra axiomatically and treats sub-coalgebras. establish the main structural results on the srs coalgebra. Section 9 defines orbital invariants, proves that regular coalgebras are chiral, and classifies finite coalgebras. Section 10 addresses symmetry, showing is symmetric while is not. Section 11 establishes that srs is the unique geometric realization of HTC. Section 12 summarizes contributions and discusses open problems. Appendices collect crystallographic data and notation.
2. Related Work
Final coalgebras for polynomial functors on are classical. Existence and structural properties follow from terminal sequences and Lambek’s lemma [1,9,16]. For unlabeled tree functors on (e.g., with ), the final coalgebra is a singleton: without observable labels, all infinite n-ary trees are behaviorally equivalent. However, working in the equivariant category enriches the structure. The phase dynamics (, where obs denotes the observable phase; see 3) implies that every F-coalgebra carries a free-action—no fixed points exist. This structural constraint, combined with the observable phase, prevents collapse and yields a non-trivial final coalgebra. Our use of coinduction and extensionality follows the standard coalgebraic semantics literature [7,13], specialized here to the equivariant setting. We are not aware of prior work specifically addressing final coalgebras for in .
The -bisimulation introduced here corresponds to bisimulation up to the group action, allowing cyclic phase shifts in the matching relation (see 8). The ambient category is a presheaf category [10]; it provides the equivariant backbone for our construction.
On the geometric side, the srs lattice is well studied in graph theory and crystallography. It appears as the Laves graph and the net of the gyroid minimal surface [4,12,15]. Our coalgebraic viewpoint complements the covering theory of graphs developed in [6], encoding the cyclic phase data arising from the rotation system (Section 6) in the language of F-coalgebras.
3. Preliminaries
This section establishes the categorical framework. We define the category of sets with a -action, the endofunctor given by , and the notion of F-coalgebra. The classical results of Adámek and Lambek then guarantee existence and uniqueness (up to unique isomorphism) of a final coalgebra; see 1 and 1.
Convention. Unless stated otherwise, we consider only non-empty coalgebras. The category itself is not restricted; in particular, the final coalgebra is constructed in the full category.
3.1. The category
We write with addition modulo 3.
Definition 1
(Category ). The category has:
- Objects: pairs where X is a set and is a bijection satisfying .
- Morphisms: equivariant functions, i.e., such that .
Remark 1.
The category is equivalent to the functor category , where is viewed as a one-object category (the cyclic group of order 3).
3.2. The functor F
Definition 2
(Functor F). The endofunctor is defined by (identifying and writing elements as ):
- On objects: where increments thephase and cyclically permutes the triple.
- On morphisms: , acting as identity on the component and componentwise on the triple.
This is well-defined: , so ; moreover (where denotes componentwise application) commutes with :
so is a morphism in . Functoriality follows: , and .
Key property:F does not lift the input action θ diagonally to ; instead, it equips with the fixed action regardless of θ. Equivalently, where is the forgetful functor and is defined by .
3.3. F-coalgebras
Definition 3
(F-coalgebra). An F-coalgebra (in ) is a triple where and is an equivariant morphism. We write the triple explicitly to emphasize the -action; equivalently, an F-coalgebra is a pair where is an object of and d is a morphism in . The equivariance condition is:
We write where is theobservable phaseand are thechildrenof x. We use the shorthand for children; note that indices refer to children, not to components of the quadruplet.
Remark 2
(Equivariance unfolded). Equivariance means:
Thus : the phase increments under θ. The children are also cyclically permuted. Note that the component maps obs and arenotindividually equivariant: obs satisfies the twisted relation (where denotes the function ), while the children satisfy (indices mod 3).
Proposition 1
(Free actions only). If is an F-coalgebra with , then the -action is free: for all and .
Proof.
The phase increment implies that fixed points are impossible. Indeed, if , then , a contradiction in . If , then , reducing to the previous case. □
Corollary 1
(Cardinality constraint). If is a non-empty F-coalgebra, then every orbit has size 3. In particular, is divisible by 3, and the smallest non-empty coalgebras have exactly 3 elements.
Convention. All child indices are taken modulo 3. Expressions like or are computed in .
Definition 4
(Children and dependency graph). For an F-coalgebra , we distinguish:
- Thechild triple, an ordered triple. The ordering is essential: under θ, the child triple transforms as .
- Thechild set, the underlying set (support) of the child triple.
Thedependency graph is the simple undirected graph with vertex set X and edge set . This is the underlying simple graph obtained by forgetting directions and discarding self-loops and multiplicities.
For a subset , we write for the induced subgraph of on vertex set S: edges are those of with both endpoints in S. This is the graph-theoretic induced subgraph, not necessarily a sub-coalgebra (which would additionally require S to be closed under d and θ).
Definition 5
(Orbit). For , theorbitof x is . By 1, if , the action is free, so .
Remark 3
(Orbital invariance of children). Since θ permutes children cyclically (), the child set is constant on orbits. However, θ is not generally a graph automorphism: if is an edge, need not be.
Definition 6
(Connectivity). An F-coalgebra isconnectedif and its dependency graph is connected as an undirected graph.
Definition 7
(Coalgebra morphism). Acoalgebra morphism is an equivariant function such that . Equivalently (using the notation of 3), and for all i. (Equivariance must be required explicitly: since F equips its output with the fixed action regardless of the input action, the coalgebra equation alone does not enforce equivariance.)
Remark 4
(The -action is not a coalgebra endomorphism). In general, the generator of the -action isnota coalgebra morphism from to itself. A coalgebra endomorphism f must satisfy , but we have , and in general. This is why θ does not automatically preserve derived structures such as the dependency graph (3).
3.4. Final coalgebras
Theorem 1
(Terminal chain [1,2]). Let be a locally presentable category and an accessible functor. The terminal sequence is defined by:
- (terminal object in )
- , with the unique morphism
- with for
- for limit ordinals λ, with the projection
- for
By [1], this sequence stabilizes at some ordinal α: the connecting map is an isomorphism. Then is the final F-coalgebra.
Applicability to :The category is locally finitely presentable [2]. Filtered colimits in are created by the forgetful functor ; since finite products commute with filtered colimits in , the functor F preserves filtered colimits, hence is finitary (and thus accessible).
Lemma 1
(Lambek [9]). If is a final F-coalgebra, then is an isomorphism in .
4. -Bisimulation
Bisimulation is the fundamental equivalence relation in coalgebraic semantics. In the presence of a -action, we distinguish two variants: standard bisimulation requires identical observations and exact child matching; -bisimulation relaxes this by allowing observations and children to be related up to a cyclic shift. Orbital equivalence is always contained in -bisimilarity (2), though the converse may fail. Standard bisimulation yields the extensionality principle in the final coalgebra , where bisimilarity coincides with equality.
4.1. Definition
Definition 8
(-bisimulation). Let be an F-coalgebra. A relation is a-bisimulationif whenever , theshift satisfies:
where indices are taken modulo 3. Equivalently, the i-th child of x is R-related to the -th child of y. Intuitively, the shift k compensates for the phase difference: we compare children in "rotated frames of reference" aligned by their observations.
Convention on index arithmetic.The index shift corresponds to the inverse of the θ-action on children. By 2, , so if , then . This justifies the choice of (not ) in the child matching condition.
Note that the definition does not constrain the shift of the child pairs ; their shift is determined by the coalgebra structure.
Figure 1.
A 6-element coalgebra with two -orbits. Blue arrows: the -action cycling within each orbit. Red dashed arrows: the relation . Gray arrows: children of (i.e., ). Note the phase shift: but , giving shift . The -bisimulation condition matches , but standard bisimulation would require , which fails.
Figure 1.
A 6-element coalgebra with two -orbits. Blue arrows: the -action cycling within each orbit. Red dashed arrows: the relation . Gray arrows: children of (i.e., ). Note the phase shift: but , giving shift . The -bisimulation condition matches , but standard bisimulation would require , which fails.
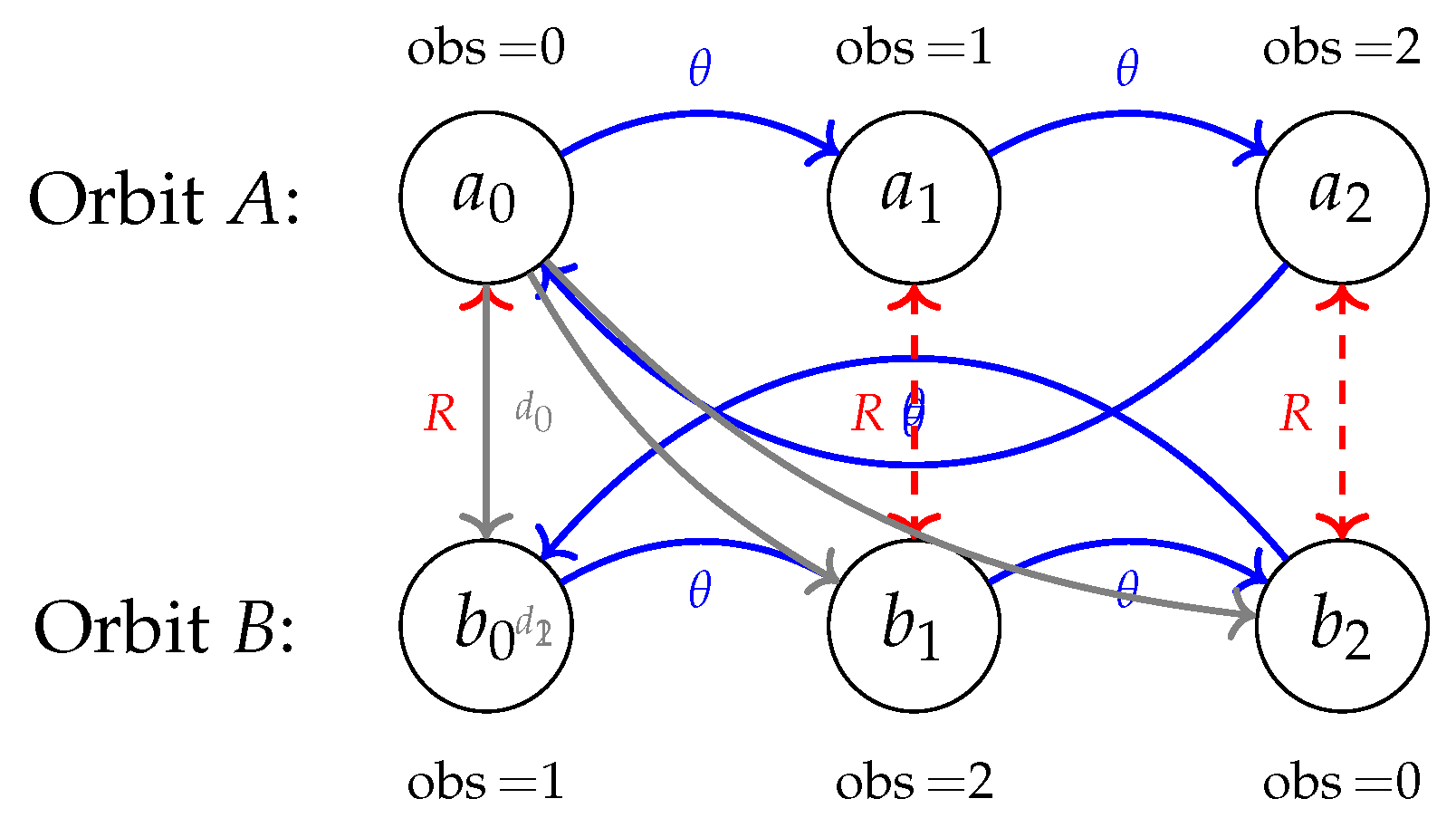
Example 1
(Comparing -bisimulation and standard bisimulation). Consider a 6-element coalgebra X with two θ-orbits, illustrated below:
The data is summarized in tables:
The children are determined by equivariance from base cases and :
Claim:The relation is a -bisimulation but not a standard bisimulation.
-bisimulation:For , the shift is . We check: ?
The shift is constant across all pairs .
Not standard:Standard bisimulation requires , i.e., . But R only contains .
Definition 9
(Standard bisimulation). Astandard bisimulationis a relation satisfying:
- 1.
- Phase matching:
- 2.
- -stability:
- 3.
- Child matching: for
Equivalently, a standard bisimulation is a -bisimulation with shift that is also θ-stable.
Two elements arestandard bisimilar, written , if there exists a standard bisimulation R with . The class of standard bisimulations is closed under arbitrary unions (phase matching, θ-stability, and child matching are each preserved by unions), so ∼ is the largest standard bisimulation.
Remark 5
(Categorical justification). The θ-stability axiom is not ad hoc but arises from the categorical definition of bisimulation. In the coalgebraic sense [13], a bisimulation on an F-coalgebra in is a relation that carries an F-coalgebra structure making the projections into coalgebra morphisms. Since morphisms in must be -equivariant, the relation R must satisfy , i.e., be θ-stable. The three conditions of 9 are equivalent to this categorical definition.
4.2. The orbital relation
Definition 10
(Orbit). For , the-orbitof x is:
(This is well-defined since in ; see 1.)
Definition 11
(Orbital graph). Theorbital graph is defined as:
- Vertices: (the θ-orbits)
- Edges: if and only if for some representatives
Since is an undirected graph (4), orbits and are adjacent iff there exist and such that y is a child of x or x is a child of y.
Theorem 2
(Orbital -bisimulation). The orbital relation is always a -bisimulation.
Proof.
Let for some . The shift is (by 2: ).
By iterated equivariance (; see 2), the children satisfy . (Explicitly: acts on child indices as , so acts as .) We verify :
Thus we need , which holds since by 10. □
Proposition 2
(Orbital relation is not a standard bisimulation). In any F-coalgebra, is not a standard bisimulation.
Proof.
Standard bisimulation requires phase matching: . However, contains pairs for all x, and by equivariance in (since in ). Thus phase matching fails immediately. □
4.3. Extensionality
Proposition 3
(Extensionality in the final coalgebra [13]). In the final coalgebra Ω, standard bisimilarity coincides with equality:
where ∼ denotes standard bisimilarity. This is a standard property of final coalgebras; we include the statement for reference.
Corollary 2
(Coinduction principle). Let be an F-coalgebra and the unique morphism to the final coalgebra. If is a standard bisimulation with , then .
Proof.
The image is a standard bisimulation on :
- Phase matching: since h is a coalgebra morphism, hence .
- θ-stability: Since , we have .
- Child matching: since h commutes with d, so .
By extensionality (3), , hence . □
Theorem 3
(Orbital extensionality for regular elements). In the final coalgebra Ω, forregularelements (those with degeneracy , i.e., having three distinct children; see 21), -bisimilarity coincides with orbital equivalence. Precisely: if with , then
where means there exists a -bisimulation R with .
Proof. (⇐) If , then , which is a -bisimulation by 2.
(⇒) Let R be a -bisimulation on with , and let . We show .
Step 1: Orbital closure. Define the orbital closure of R:
Then is -stable by construction and contains R. We verify is a -bisimulation: if with , the shift is . By the -bisimulation property of R, for each j. By equivariance, and . Since , we have
Step 2: Shift-corrected relation. Define:
where . Since , we have .
Step 3: S is a standard bisimulation (on elements reachable from regular x).
- Phase matching: For with where , we have .
- θ-stability: If with for and , then by -stability of . The shift is preserved: . Thus .
-
Child matching: Let . By phase matching, . We must show for each i.By construction of S, there exists with where . By equivariance, . The -bisimulation property of gives , i.e., .Now we compute . Since , the element x has three distinct children. In the final coalgebra , by Lambek’s lemma (1), is an isomorphism. For regular elements (reachable from x), the constraint with distinct forces , , (since otherwise distinct children with equal phases would be bisimilar by coinduction, contradicting extensionality). Thus for regular elements in . Similarly for w. Since (phase matching), we have .By definition of S: .
Thus S is a standard bisimulation containing . By extensionality (3), , hence . □
Remark 6
(Failure for singular elements). The regularity hypothesis is essential. For singular elements in the final coalgebra Ω, -bisimilarity can relate elements from different orbits. Since is an isomorphism by Lambek’s lemma (1), we can construct where (the 3-element image of the srs coalgebra; see Section 8). Then z is singular (, meaning all three children coincide) and there exists a -bisimulation relating z to , even though .
Remark 7
(Conceptual interpretation). Informally, -bisimulations on X correspond to standard bisimulations on the orbital quotient in . The shift parameter k in 8 compensates for the phase offset within an orbit, ensuring that the bisimulation condition descends coherently to the quotient. (A precise categorical formulation would require defining an appropriate coalgebra structure on the quotient, which we do not pursue here.)
5. The Helical Triadic Coalgebra
This section defines the Helical Triadic Coalgebra (HTC) as the final coalgebra for the functor F in . We establish existence via the terminal sequence construction (1), derive basic properties (infinitude, bijectivity of the structure map), and develop the theory of sub-coalgebras.
5.1. Axiomatic definition
(HTC)).Definition 12 (Helical Triadic Coalgebra Assuming existence of a final coalgebra for F in (established in 4 below), we define theHelical Triadic Coalgebrato be the final coalgebra .
As an F-coalgebra in , Ω satisfies the following properties:
- is a -set with .
- is equivariant: .
The defining characteristic is:
- Finality: For every F-coalgebra , there exists a unique equivariant coalgebra morphism .
Properties (HTC1)–(HTC2) follow from the definition of F-coalgebra in (3); (HTC3) is the universal property that uniquely characterizes Ω.
Proposition 4
(Three distinct phases in ). The final coalgebra contains elements of all three observable phases:
- (i)
- , with elements satisfying for ;
- (ii)
- on Ω.
Proof.
The observable phase is preserved by coalgebra morphisms, making distinct phases distinguishable in .
Step 1: Coalgebra morphisms preserve observable phase. Recall that where is the first projection. Let be any coalgebra morphism in (hence equivariant: ). Since h commutes with the structure maps, , and , applying to both sides gives:
Step 2: A concrete 3-element F-coalgebra. Define with (so ) and structure map (indices mod 3). Equivariance holds: , since . Thus is an F-coalgebra in .
Step 3: Three distinct elements in . Let be the unique coalgebra morphism. By Step 1, . Since the three elements have distinct observable phases, their images are pairwise distinct in . Hence .
Step 4: Non-triviality of . The morphism h is equivariant: . Since in X, we have by Step 3. Thus on . □
5.2. Existence and uniqueness
Theorem 4
(Existence and uniqueness of the final coalgebra). The final coalgebra for F in exists and is unique up to unique isomorphism.
Proof.
By 1, it suffices to verify the hypotheses: is locally presentable and F is accessible. We check these and note the specific convergence ordinal.
Hypotheses of 1. The category is a presheaf category, hence locally finitely presentable [2]. The functor F is finitary: filtered colimits in are computed pointwise, finite products preserve filtered colimits in , and preserves all colimits; hence preserves filtered colimits. Being finitary, F is accessible.
Construction. By 1, the terminal sequence converges at some ordinal . The final coalgebra is , with structure map . Limits in are computed pointwise: if is the -set at stage , then the limit carries the action defined by universality, satisfying for all . This makes all projections equivariant.
Uniqueness. Terminal objects are unique up to unique isomorphism: if and are both final, the unique morphisms and compose to endomorphisms that must equal the identity by uniqueness. □
5.3. Properties
Proposition 5
(Divisibility). For any finite F-coalgebra : .
Proof.
The orbits of partition X. Since , the size of each orbit divides 3, hence equals 1 or 3. By 1, the -action on any F-coalgebra is free, so there are no orbits of size 1; thus all orbits have size 3. Since X is partitioned into blocks of size 3, we have . □
Remark 8.
Since every sub-coalgebra inherits the F-coalgebra structure, 5 applies to finite sub-coalgebras of infinite coalgebras. In particular, every finite sub-coalgebra of Ω has cardinality divisible by 3.
Corollary 3
(Universal property). For any F-coalgebra in , there exists a unique morphism in such that .
Proof.
By (HTC3) in 12, there exists a unique equivariant coalgebra morphism . By definition of coalgebra morphism, h satisfies . □
Remark 9
(Canonical morphism and behavioural equivalence). Every F-coalgebra admits a unique coalgebra morphism , called thecanonical morphism. The kernel pair of h (i.e., ) contains the largest standard bisimulation on Y. Since is a polynomial functor (built from products and constants), it preserves weak pullbacks pointwise; in this case, coincides with behavioural equivalence (cf. 2 and [13]). In particular, h is injective if and only if behavioural equivalence on Y is equality.
Proposition 6
(Infinitude). The final coalgebra Ω is infinite: .
Proof.
By Lambek’s lemma (1), the structure map is an isomorphism in . Since the forgetful functor reflects isomorphisms (equivariant bijections are isomorphisms), d is a bijection of underlying sets. Suppose is finite with . Then:
hence . Since has no solution in , we obtain , i.e., .
However, non-empty F-coalgebras exist: the witness coalgebra from 4 has . By finality, there must exist a morphism . But if , no function exists when . Contradiction.
Therefore is not finite, i.e., . □
Corollary 4
(Freeness of the -action on ). The -action on Ω is free: for all and , .
Proof.
By 6, . By 1, the action on any non-empty F-coalgebra is free. □
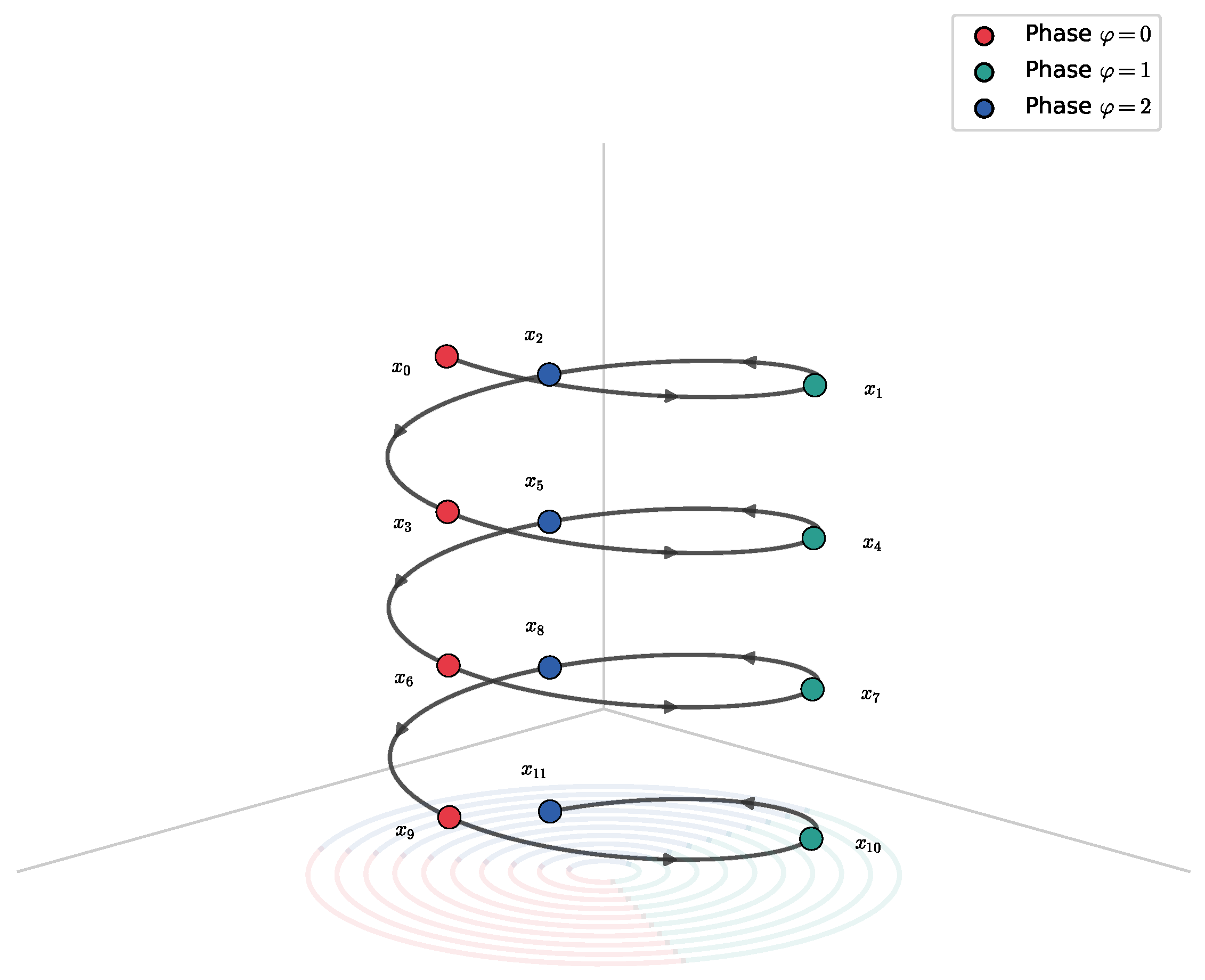
Figure 2.
A path in the unfolding of the Helical Triadic Coalgebra. Each transition selects a child and advances the phase by , visualized as a rotation along the helix. The coloring indicates phase: (red), (teal), (blue).
Figure 2.
A path in the unfolding of the Helical Triadic Coalgebra. Each transition selects a child and advances the phase by , visualized as a rotation along the helix. The coloring indicates phase: (red), (teal), (blue).
Corollary 5
(Bijectivity of the structure map). The structure map is bijective. Equivalently, for every , there exists a unique such that .
Proof.
By 1, the structure map is an isomorphism in . Let be its inverse. For any , set . Then , proving existence. If , applying yields , proving uniqueness. □
5.4. Self-similarity
The isomorphism from 1 exhibits as a fixed point of the functor F: the final coalgebra satisfies . This equation is the hallmark of self-similar (or fractal) structures in coalgebraic semantics. We now make this precise.
Definition 13
(Descendant closure). For , thedescendant closure is the smallest subset of Ω containing x and closed under children:
Equivalently, .
Theorem 5
(Self-similarity of ). The final coalgebra Ω is self-similar:
- (i)
- Fixed-point equation: as -sets.
- (ii)
- Local universality: For every , the descendant closure is a sub-coalgebra, and the inclusion is the unique coalgebra morphism from to the final coalgebra.
- (iii)
- Recursive decomposition: Every element with satisfies
Proof. (i) This is 1: the structure map is an isomorphism.
(ii) By definition, is closed under children. For -closure: if , there is a path in . Since is a coalgebra automorphism, for each i, giving a path from to . But (taking and using -closure of applied to x itself—we verify this separately: by definition, and has children , so the sub-coalgebra generated by x contains ). Hence , proving -closure.
Thus is a sub-coalgebra. As a sub-coalgebra of the final coalgebra, it inherits the F-coalgebra structure, and the inclusion is trivially a coalgebra morphism. Uniqueness follows from finality.
(iii) The inclusion ⊇ is immediate: , and any descendant of a, b, or c is reachable from x via one additional edge. For ⊆: any with lies on a path starting where , hence . □
Remark 10
(Fractal interpretation). The fixed-point equation can be read as: “Ω consists of a phase in together with three copies of itself.” This is analogous to how the Cantor set C satisfies , or how the Sierpiński triangle decomposes into three scaled copies. The coalgebraic formulation captures this self-similarity abstractly, without reference to a metric or embedding.
Corollary 6
(Behavioral equivalence and self-similarity). For any F-coalgebra and element , the sub-coalgebra generated by x maps to under the canonical morphism . In particular, every element of every F-coalgebra “sees” a sub-coalgebra of Ω.
Proof.
The sub-coalgebra generated by x in X maps via to a sub-coalgebra of containing , hence contained in . Surjectivity onto may fail if is not injective. □
5.5. Sub-coalgebras
Definition 14
(Sub-coalgebra). Asub-coalgebraof is a subset such that:
- 1.
- Y is closed under θ:
- 2.
- Y is closed under d: for all and
Proposition 7
(Orbital closure). Every sub-coalgebra is a union of complete orbits.
Proof.
Let Y be a sub-coalgebra and let . Since Y is -stable, and thus . Since , the orbit is . Hence is a union of complete orbits. □
Corollary 7
(Minimal finite sub-coalgebras). Let be an F-coalgebra. Then:
- (i)
- Every non-empty finite sub-coalgebra has at least 3 elements.
- (ii)
- If , then Y is a single -orbit.
The bound is sharp: we will exhibit a 3-element sub-coalgebra in Section 8.
Proof. (1) By 7, Y is a union of complete orbits. By 1, the action is free, so each orbit has exactly 3 elements. Hence for some (since Y is non-empty), so .
(2) If , then Y is a union of orbits of size 3. Since distinct orbits are disjoint, a union with total cardinality 3 consists of exactly one orbit. □
6. The srs Coalgebra
We now construct a natural F-coalgebra structure on the srs lattice, a classical 3-regular graph from crystallography also known as the Laves graph or -a net. The key observation is that the rotation system—the cyclic ordering of neighbors at each vertex induced by the embedding in —provides exactly the data needed for comultiplication. Combined with a phase variable in , this yields an infinite F-coalgebra with rich structure: translation invariance by , chirality inherited from the crystallographic space group , and a canonical morphism to the final coalgebra .
6.1. The srs lattice
The srs lattice (also known as the Laves graph or -a net) is a classical object in crystallography [12,15], appearing as the skeleton of the gyroid minimal surface.
Definition 15
(srs lattice). Thesrs latticeis the maximal abelian cover of the complete graph . We give an explicit construction via voltage graphs [6].
Voltage assignment.Label the vertices of as . Orient each edge with . Define the voltage by:
| Edge | ||||||
For the reverse orientation, .
Derived graph.The srs lattice has:
- 1.
- Vertices: pairs , where i is the vertex type and n the lattice translate.
- 2.
- Edges: is adjacent to whenever is an edge of .
The projection , , is a regular covering with deck group acting by .
Properties: 3-regular, girth 10, space group (No. 214), chiral.
Remark 11
(Covering space interpretation). The srs lattice is the maximal abelian cover of the complete graph . The covering map has deck transformation group .
Remark 12
(Coxeter coordinates). Following Coxeter [4], the srs lattice can be constructed by selecting one-eighth of with period 4. The base points
repeat periodically, with edges connecting pairs at distance .
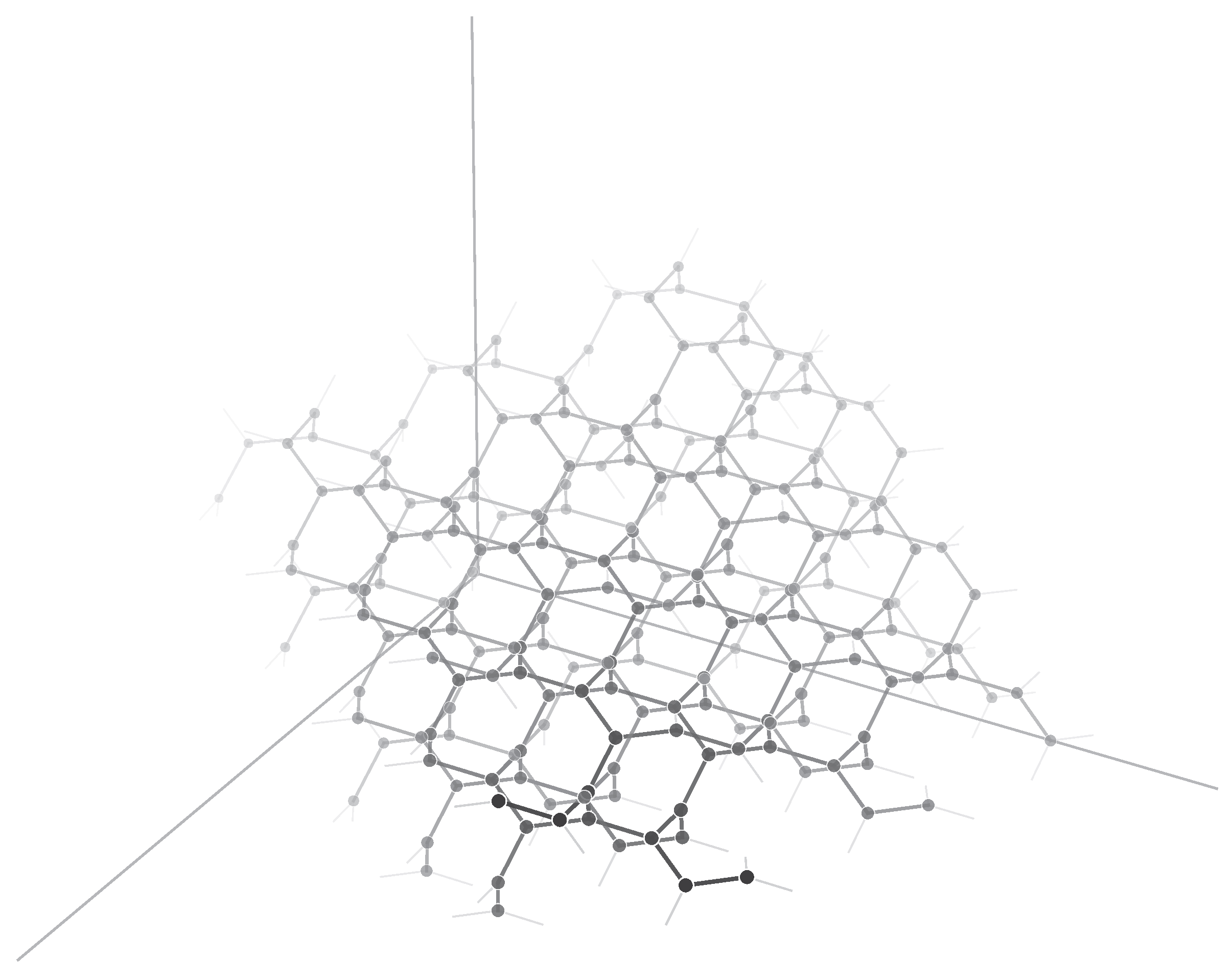
Figure 3.
The srs lattice viewed along a direction revealing its helical structure. Darker vertices and edges are closer to the viewer; lighter ones recede into the background. Stub edges at the boundary indicate the trivalent continuation of the infinite graph.
Figure 3.
The srs lattice viewed along a direction revealing its helical structure. Darker vertices and edges are closer to the viewer; lighter ones recede into the background. Stub edges at the boundary indicate the trivalent continuation of the infinite graph.
6.2. Coalgebra structure on the srs lattice
Definition 16
(srs coalgebra ). Thesrs coalgebrais with:
-action:
Comultiplication:Fix an orientation of (equivalently, a handedness). At each vertex , the embedding induces acyclic orderingof the three neighbors, viewed from outside a small sphere centered at v. To define comultiplication, we mustlinearizethis cyclic order to an indexed triple. We fix a linearization by choosing, for each vertex type , a distinguished starting neighbor , then proceeding cyclically. This yields a rotation system where is the linearized triple of neighbors at v. The explicit linearization is given in Section 7.5. Then:
where indices are taken modulo 3. The observable phase is .
Proposition 8
( is an F-coalgebra). The triple is an F-coalgebra: equivariance holds.
Proof.
The action satisfies since , so .
For equivariance, let with .
Hence LHS = RHS, so . □
Remark 13
(Translation invariance). Using the representation for vertices of srs (15), elements of can be written as triples . The group acts on by translations: for .
Translation data.By the voltage graph construction (15), the k-th neighbor of vertex has the form where:
- is thedisplacement vector(depending only on , not on n),
- is theneighbor type(again depending only on ).
These are determined by the voltage assignment and linearization from Section 7.5.
Coalgebra automorphism property.Since
each translation is a coalgebra automorphism of .
Freeness.The action is free: implies , hence .
6.3. Connection to
Theorem 6
(srs as maximal abelian cover [15]). The srs lattice is the maximal abelian cover of with voltage assignment in .
Lemma 2
(Coalgebra automorphisms induce graph automorphisms). Let be an F-coalgebra with simple. If is a coalgebra automorphism, then α is a graph automorphism of .
Moreover, if a group Γ acts freely on X by coalgebra automorphisms and the action has no edge inversions, then the quotient map is a regular covering of graphs (see [6]).
Proof.
Since is a coalgebra morphism, , so for each i. Hence if , then , so preserves adjacency. Bijectivity ensures is a graph automorphism.
For the covering statement, define via vertex-orbits and dart-orbits. Freeness on vertices plus absence of edge inversions implies freeness on darts. Hence is locally bijective on darts, making it a regular covering with deck group . □
Theorem 7
(Uniqueness of coalgebra with quotient ). Let be a connected F-coalgebra (6) such that:
- (i)
- The dependency graph is simple and 3-regular,
- (ii)
- and ,
- (iii)
- acts freely on X by coalgebra automorphisms, with finite quotient.
Then if and only if .
Proof.
By (i) and (iii), 2 applies. The action has no edge inversions: if g inverted an edge , then , so by freeness, contradicting that is torsion-free. Hence is a regular covering with deck group .
Necessity. If , then corresponds to an epimorphism . Since and is abelian, factors through the abelianization . Any surjection is an isomorphism, so , making the maximal abelian cover. By 6, .
Sufficiency. By 6, admits a free -action by translations with quotient . □
Corollary 8
(Properties of the srs coalgebra). The srs coalgebra with its HTC structure from 16 satisfies:
- (i)
- is an F-coalgebra satisfying axioms (HTC1)–(HTC2),
- (ii)
- There exists a unique coalgebra morphism to the final coalgebra,
- (iii)
- ι isnotinjective (9), so .
Proof. (a) follows from 8. (b) follows from finality of . (c) is proven in 9. □
Remark 14
(On symmetry actions). The -action θ on acts on thephase component: . This is distinct from the -action on the base graph by rotational symmetry (fixing one vertex and cyclically permuting the other three). The latter does not lift to a coalgebra automorphism of compatible with θ, since such a lift would act on vertices while θ acts on phases.
6.4. Local self-similarity of the srs coalgebra
The srs coalgebra exhibits a strong form of local self-similarity: every vertex generates the entire coalgebra, and all such generations are isomorphic via translation.
Definition 17
(Generated sub-coalgebra). For , thesub-coalgebra generated by is:
Theorem 8
(Local self-similarity of ). The srs coalgebra is locally self-similar:
- (i)
- Global generation: For every , the sub-coalgebra generated by is the entire coalgebra: .
- (ii)
- Translation equivalence: For every , the translation defined by is a coalgebra isomorphism.
- (iii)
- Quotient independence: The quotient is independent of the choice of base point.
Proof. (i) The underlying graph of projects onto the srs lattice (forgetting the phase). The srs lattice is connected: it is the maximal abelian cover of , which is connected, and covering maps preserve path-connectivity. Hence from any vertex v, every other vertex w is reachable via a path in srs. The same path, decorated with phases, shows that is reachable from for appropriate . Since is closed under d and , it contains all vertices reachable from , hence .
(ii) This is 13: translations preserve the coalgebra structure because the neighbor relationships in srs are translation-invariant. Explicitly, if are the neighbors of v, then , so .
(iii) The quotient identifies with for all . The result is , independent of which representative we choose for each equivalence class. □
Corollary 9
(Every vertex of srs generates an isomorphic copy). Let be any two vertices of the srs lattice. Then:
- (i)
- The sub-coalgebras and are both equal to .
- (ii)
- There exists and such that maps a neighborhood of isomorphically to a neighborhood of .
In particular, the “local view” from any vertex of is coalgebraically indistinguishable from any other, up to translation.
Proof. (i) is immediate from 8(i). For (ii), write and in the standard coordinates. If , take . If , the srs lattice’s vertex-transitivity (under the space group ) ensures an isometry mapping v to w; this isometry decomposes into a translation and a rotation, and the translation component provides the required t. □
Remark 15
(Comparison with ). The local self-similarity of (8) should be contrasted with that of Ω (5):
- In : every element generates thesamecoalgebra (the whole of ), and all such generations are related by translation automorphisms.
- In Ω: every element x generates a sub-coalgebra , but these sub-coalgebras may differ. For instance, for (a 3-element sub-coalgebra), while for the asymmetric element .
This difference reflects the fact that has a large automorphism group () acting transitively on vertex types, while Ω may have a smaller automorphism group (an open question; see Section 12).
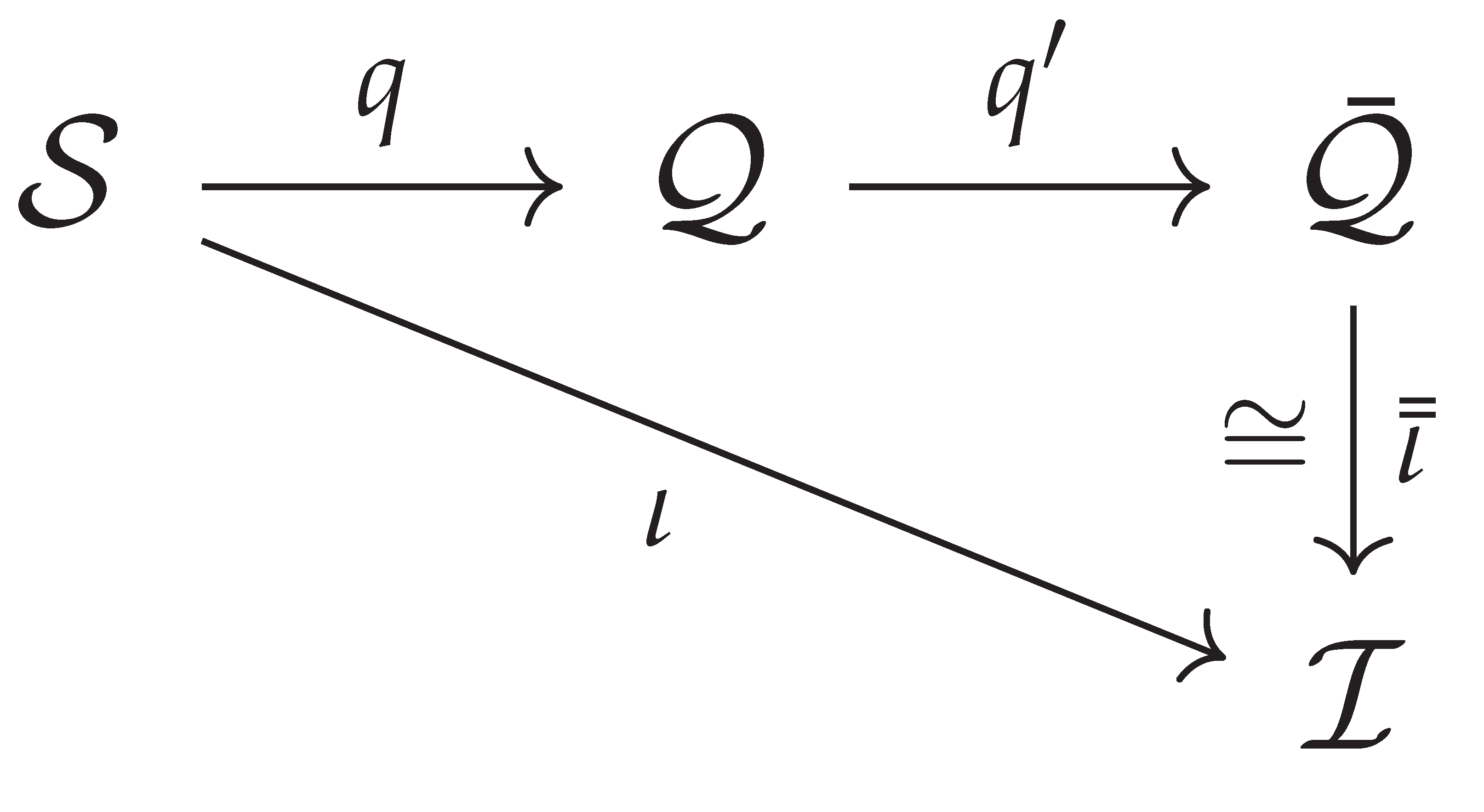
7. The Canonical Morphism and Factorization
This section studies the canonical morphism from the srs coalgebra to the final coalgebra. The central result is a non-injectivity theorem: despite the infinite size of , the morphism identifies all elements related by translation. This yields a factorization through a finite 12-element quotient . The behavioral content of srs—as seen by the final coalgebra—is thus entirely captured by the rotation system on , together with a phase in .
7.1. The canonical morphism
By finality of , there exists a unique equivariant coalgebra morphism:
7.2. Non-injectivity theorem
Theorem 9
(Non-injectivity of ). The canonical morphism isnotinjective.
Proof.
We exhibit a standard bisimulation relating distinct elements.
Step 1: Translation relation. Define by:
Two elements are related iff they have the same vertex type and same phase .
Step 2: is a standard bisimulation. We verify the three conditions of 9.
Phase matching: By definition of , if then both elements have phase , so .
θ-stability: If , then and . These have the same type i and same phase , hence .
Child matching: Since srs is a -periodic graph, translation acts by coalgebra automorphisms: the rotation system at has the form:
where the displacement vectors and neighbor types depend only on , not on the position n.
For :
These have the same type and same phase , hence:
Step 3: Conclusion. Since is a standard bisimulation on , by the coinduction principle (2):
Since the translation action is free (13), for we have in . These are distinct elements with equal images, so is not injective. □
Lemma 3
(Translation equivalence). The translation relation from 9 is an equivalence relation.
Proof.
Let , , be elements of .
Reflexivity: For any , taking gives , hence .
Symmetry: If , then and for some . Thus , i.e., .
Transitivity: If and , then , , and for the same . Hence , i.e., . □
7.3. The quotient coalgebra
Definition 18
(Quotient by translations). Thequotient by translationsis:
where acts by translation: .
We have .
Remark 16
(Symmetry reduction). This quotient construction is analogous to symmetry reduction techniques in model checking [3], where equivalent states under a group action are identified to reduce the state space. Here, the translation group acts freely on the infinite srs lattice, and the quotient is a finite representative.
Proposition 9
(Quotient coalgebra structure). inherits an F-coalgebra structure making the quotient map a coalgebra morphism:
- (i)
- (ii)
where is the neighbor type inherited from the rotation system on srs (16). The observable phase is .
Proof. Well-definedness and morphism property. Let denote the quotient map, and write for the equivalence class of . We define:
To verify well-definedness, suppose for some . By 13, translations commute with , so:
For , using and :
Hence and are well-defined on equivalence classes. By construction:
so q is a coalgebra morphism.
Explicit formula. We now derive the explicit form stated in the proposition. Let where has vertex type . Then . By 16, where is the rotation system at v. Applying the quotient map:
By 13 (the neighbor types in the rotation system depend only on ), the type of is determined by i and , independent of the specific vertex v within its translation class. Hence for , yielding the formula in the statement.
-action: since . Also since for .
Equivariance: We check :
These are equal. □
7.4. Factorization theorem
Theorem 10
(Factorization). The canonical morphism factors as:

where is the quotient map and is induced by finality.
Proof.
By 9, is a morphism of F-coalgebras. By finality of , there exists a unique coalgebra morphism . Then is a coalgebra morphism. Since is the unique morphism to the final coalgebra, we have . □
7.5. Explicit rotation system on
Using Coxeter coordinates for srs, the four vertex types are positioned at:
Neighbor types. The rotation system (neighbor types ) on inherited from the embedding of srs in is:
| i | |||
| 0 | 1 | 2 | 3 |
| 1 | 0 | 3 | 2 |
| 2 | 3 | 0 | 1 |
| 3 | 2 | 1 | 0 |
Displacement vectors. The displacement vectors for each are:
| i | |||
| 0 | |||
| 1 | |||
| 2 | |||
| 3 |
These satisfy: the k-th neighbor of vertex is .
This data encodes the linearization of the cyclic ordering of neighbors for each vertex type. The rotation system is chiral: there is no automorphism of that reverses all cyclic orderings simultaneously.
7.6. Classification of standard bisimulations on
We now classify all standard bisimulations on . Recall that , and denote by the projection onto the phase component: . By 9, a standard bisimulation satisfies three conditions: (1) phase matching: ; (2) -stability: ; and (3) child matching: for all t.
Since on , the phase matching condition forces for any pair . This crucial constraint restricts the structure considerably.
Lemma 4
(Phase constraint). Let R be a standard bisimulation on . Then implies . Moreover, by θ-stability, implies for all .
Proof.
The phase matching condition requires , i.e., . By -stability, implies , i.e., . Iterating gives the result. □
Thus a standard bisimulation R is entirely determined by the type relation defined by:
By -stability, iff .
Lemma 5
(Closure condition). The relation R satisfies the child matching condition if and only if T satisfies the closure condition:
Proof.
Recall from 9 that .
Suppose R satisfies child matching and . Then . By child matching, for all :
Proposition 10
(Orbit structure). Condition (1) partitions into exactly 4 orbits of size 4. Each orbit is the graph of a permutation .
Proof.
Let . For each , define by . From the table in Section 7.5, each is a permutation of .
Define
Each is a bijection of P. The subsets of P stable under the maps (equivalently, satisfying (1)) are exactly those stable under the group . Thus the orbits of the G-action partition P.
We show that P decomposes into exactly four orbits, each of cardinality 4. The group G acts diagonally on P: each applies to both coordinates. Let . From the table in Section 7.5, one verifies that H acts transitively on : starting from 0, we have , , , and , reaching all four elements.
For any , the orbit . Since H acts transitively on the first coordinate, the orbit contains elements with all four possible first coordinates. Thus . Since and orbits partition P, we have at most 4 orbits. If some orbit had size , there would be fewer than 4 orbits, but then some orbit would have size , contradicting that the first-coordinate projection is surjective onto a 4-element set with fibers of size per orbit (by the final paragraph below). Hence all orbits have size exactly 4, and there are exactly 4 orbits.
Finally, let O be an orbit of cardinality 4. The projection onto the first coordinate is equivariant for the induced action of H. By inspection of the table, H acts transitively on , so . Since , the map is bijective, and for a unique . □
The explicit orbits are the graphs of the four permutations forming the Klein four-group :
We write for this set of permutations.
Theorem 11
(Classification of standard bisimulations). A relation is a standard bisimulation if and only if there exists a subset such that:
where .
In particular, the number of standard bisimulations on is .
Proof.
(Necessity.). Let R be a standard bisimulation. By 4, all pairs satisfy . Define . By -stability, iff .
(Closure implies union of orbits.) By 5, the child matching condition on R is equivalent to (1) on T. For each , the map is a permutation of , hence injective. Since T is finite and , injectivity implies , so . Thus T is stable under G and hence is a union of orbits. By 10, for some , giving the required form.
(Sufficiency.) Conversely, let for arbitrary . Each satisfies phase matching (both elements have phase ) and is -stable: if , then and , which is again in . For child matching: since is an orbit under G, it is stable under (1). Thus implies for each . By 5, child matching holds for . A union of relations satisfying all three conditions still satisfies them. Hence R is a standard bisimulation.
(Counting.) Each S can be chosen from , giving standard bisimulations. □
Corollary 10
(Notable bisimulations).
- (i)
- Equality:.
- (ii)
- -orbit equivalence: (the largest standard bisimulation).
Proof.
- 1.
- Equality: The diagonal contains only pairs , corresponding to , so .
- 2.
- -orbit equivalence: for all in the same -orbit means all type-pairs in are related. Hence .
□
Remark 17.
The equality bisimulation is theuniquestandard bisimulation contained in the diagonal. This doesnotimply that is extensional in the classical sense, since larger bisimulations exist.
7.7. Coalgebra automorphisms of
Lemma 6
(Coalgebra automorphisms of ). Let be a permutation. The map defined by is a coalgebra automorphism if and only if
Proof.
Since p is a permutation, is bijective with inverse .
The map commutes with since .
For the d-condition, recall that (9). Then:
while
These are equal for all iff for all . Setting , this is equivalent to for all . □
Proposition 11
(-action by automorphisms). The Klein four-group
acts on by coalgebra automorphisms via .
Proof.
We verify the condition of Lemma 6 for the two generators of .
Case : From the table in Section 7.5:
| i | |||||||||
| 0 | 1 | 2 | 3 | 0 | 3 | 2 | 0 | 3 | 2 |
| 1 | 0 | 3 | 2 | 1 | 2 | 3 | 1 | 2 | 3 |
| 2 | 3 | 0 | 1 | 2 | 1 | 0 | 2 | 1 | 0 |
| 3 | 2 | 1 | 0 | 3 | 0 | 1 | 3 | 0 | 1 |
Columns 5–7 equal columns 8–10, so for all .
Case :
| i | |||||||||
| 0 | 1 | 2 | 3 | 3 | 0 | 1 | 3 | 0 | 1 |
| 1 | 0 | 3 | 2 | 2 | 1 | 0 | 2 | 1 | 0 |
| 2 | 3 | 0 | 1 | 1 | 2 | 3 | 1 | 2 | 3 |
| 3 | 2 | 1 | 0 | 0 | 3 | 2 | 0 | 3 | 2 |
Again columns 5–7 equal columns 8–10, so for all .
Closure under composition: The condition is stable under composition: if both satisfy it, then for all :
Since and the condition is stable under composition, it holds for every word in , hence for every element of .
The action axioms and follow from and . □
Lemma 7
(Regularity of the -action). The action of on is regular: for any , there exists a unique such that .
Proof.
Let . The four elements of act on 0 as follows:
Hence , so the action is transitive. By the orbit-stabilizer theorem, for any . Since the action is transitive, , so and the action is free. Given , transitivity yields with . If also , then , hence . □
Corollary 11
(Non-injectivity of ). The morphism is not injective. The kernel of coincides with the orbit equivalence relation of the -action:
In particular, .
Proof.
Step 1: -invariance and factorization. By 11, for any , the map is a coalgebra automorphism of . Since is the unique morphism to the final coalgebra, we have . Hence is constant on -orbits, and there exists a unique map such that , where is the quotient projection.
Step 2: Identification . Since acts transitively on the type component and trivially on the phase component, each equivalence class depends only on . The map defined by is well-defined and bijective. Since acts trivially on the phase coordinate, preserves -orbits, so the -action on descends to a well-defined action on given by . Under this action, is -equivariant. Thus as -sets.
Step 3: Equivariance and injectivity of . We first show that is -equivariant. Since is a morphism of F-coalgebras, it is in particular equivariant: . Since the -action is trivial on the phase, sends orbits to orbits, so the quotient map is equivariant: . Using :
Since is surjective, , so is equivariant.
Under the identification , any equivariant map satisfies . If , then . By freeness of the -action on (4), , so . Thus is injective.
Step 4: Kernel computation. We have:
(since is injective), which holds iff and for some .
Finally, . □
8. Characterization of the Image
Having established that the canonical morphism factors through the 12-element quotient , we now determine the structure of its image . The main result is that is a 3-element sub-coalgebra forming a single -orbit, with completely explicit dynamics: . This dramatic collapse—from 12 elements to 3—reflects the -symmetry of the rotation system on : the action on vertex types becomes invisible at the level of behavioral equivalence.
Definition 19
(Image coalgebra). Theimageof the canonical morphism is .
By 11, . Since ι is equivariant, is θ-stable; by freeness of the -action (4), every orbit has size 3, so is a single θ-orbit. We show in 13 that is a sub-coalgebra, justifying the nameimage coalgebra.
Proposition 12
(Connectivity of ). The image is connected: its dependency graph has a single connected component.
Proof.
The dependency graph is connected: as established in Section 6.1, coincides with the srs lattice, which is a connected 3-regular graph (see [15]).
The canonical morphism is a coalgebra morphism (by finality), hence it preserves adjacency: if in , then in . For any path in , the sequence is a walk in (possibly with repeated vertices when identifies adjacent elements). Removing consecutive duplicates yields a path connecting to .
Since is connected and is surjective, any two vertices in are connected by such a path. Therefore is connected. □
Proposition 13
(Structure of the image). The image is a 3-element sub-coalgebra of Ω with the following properties:
- (i)
- where for any
- (ii)
- (single orbit of size 3)
- (iii)
- (observable phase ϕ; children are itself and its two rotations)
Proof. (1) Fix and set . Let . By 7, there exists with . By 11 applied to and , we get . Hence . Since (11), it follows that and these three elements are pairwise distinct.
(2) By -equivariance of :
(3) Since is a coalgebra morphism, we have . Writing :
By (1), for any type we have . Hence:
(The observable phase is since coalgebra morphisms preserve the phase: .) This shows is closed under and d, hence a sub-coalgebra. □
Remark 18
(Collapse of type information). The -symmetry of the rotation system on causes all four vertex types to become identified in the final coalgebra. The only surviving invariant is the phase . This reflects the high symmetry of srs: the coalgebra is not extensional. The quotient by the largest standard bisimulation (the -orbits) yields a 3-element coalgebra.
Remark 19
(Comparison with the srs quotient). The factorization can be refined. Define . Then:
where is an isomorphism of F-coalgebras. (The quotient inherits a coalgebra structure from since the -action consists of coalgebra automorphisms.) The image is theextensional quotientof : the quotient by the largest standard bisimulation, which identifies elements with identical behavior in Ω.
9. Orbital Invariants
This section introduces intrinsic invariants that classify elements of an F-coalgebra by their local structure. These invariants—binding index, degeneracy degree, and multiplicity signature—are constant on -orbits. They provide a fine-grained stratification of any coalgebra.
The main result is the chirality theorem for regular coalgebras (12): every non-empty regular coalgebra is chiral. This structural obstruction, derived purely from the coalgebraic axioms, informs the symmetry analysis in Section 10.
9.1. Binding index and degeneracy
The binding index measures how “self-referential” an element is: it counts how many of its children belong to its own orbit. A high binding index indicates tight internal coupling within an orbit.
Definition 20
(Binding index). Thebinding indexof is:
Values: .
Proposition 14
(Orbital invariance of E). E is constant on orbits: .
Proof.
Since , we have , hence . By equivariance, (indices mod 3). Thus
where the second equality uses the bijection on . □
The degeneracy degree captures how “collapsed” the comultiplication is: it measures the failure of injectivity. Regular elements () have three distinct children, while singular elements () point to the same child three times.
Definition 21
(Degeneracy degree). Thedegeneracy degreeof is:
Values: , corresponding to:
- :regular— three distinct children
- :binary— one repeated child
- :singular— all children identical
Proposition 15
(Orbital invariance of ). δ is constant on orbits: .
Proof.
By equivariance, if then . Thus the children of are . As sets, . Since , we have . □
9.2. Multiplicity signature
The multiplicity signature refines the degeneracy degree by recording the full pattern of child repetitions. While only counts how many children coincide, preserves the exact distribution.
Definition 22
(Multiplicity signature). Themultiplicity signature is the partition of 3 given by the multiplicities of values in the child multiset , listed in decreasing order:
| Type | Example | |
| Regular | with distinct | |
| Binary | ||
| Singular |
Since depends only on the multiset of children, and by 15 this multiset is invariant under , we have . Thus is constant on orbits.
9.3. Chirality
Definition 23
(Anti-chiral symmetry). Ananti-chiral symmetryof is a bijection satisfying:
- Orientation reversal:
- Child preservation: for
Note: (AC2) concerns only the children; the observable phase satisfies as a consequence of (AC1) and equivariance: , which is consistent with only if ρ preserves obs.
Definition 24
(Chirality). An F-coalgebra isachiralif it admits an anti-chiral symmetry. It ischiralif no such symmetry exists.
Remark 20
(Two senses of chirality). The term “chiral” is used in two related but distinct senses:
- 1.
- Intrinsic chirality(24): an F-coalgebra is chiral if it admits no internal symmetry reversing the cyclic dynamics. This is analogous to a helix having no mirror plane.
- 2.
- Chiral pair: two coalgebras related by reversing the rotation system (swapping the cyclic order of children) form a chiral pair—they are enantiomers, non-isomorphic mirror images of each other.
These notions are connected: an intrinsically chiral coalgebra and its mirror image (with reversed rotation system) form a chiral pair. The srs lattice and its enantiomer exemplify this: each is intrinsically chiral (12), and together they form a chiral pair corresponding to the two choices of orientation in .
Theorem 12
(Chirality of regular coalgebras). Every non-empty regular F-coalgebra (with everywhere) is chiral.
Proof.
Suppose for contradiction that is a non-empty regular coalgebra admitting an anti-chiral symmetry .
Since , choose and write for its children. By regularity (), the elements are pairwise distinct. Let denote the observable phase of x.
Step 1: Consequences of (AC1). The orientation reversal condition gives:
Step 2: Consequences of (AC2). The child preservation condition (AC2) gives:
By the note following 23, .
Step 3: Computing two ways.
Method 1: By equivariance, the children of are . Applying via (AC2), the children of are .
Method 2: Using Step 1:
By (AC2), the children of are . By iterated equivariance, the children of are .
Step 4: Contradiction. Comparing the two expressions:
This requires:
Hence .
But is a bijection and are distinct, so must be distinct.
Contradiction. Therefore no anti-chiral symmetry exists, and the coalgebra is chiral. □
Corollary 12
(Chirality of srs). The srs coalgebra and its quotient are chiral.
Proof.
Both and are non-empty (16 and 18).
For : by 16, . The three components have distinct phases , hence are pairwise distinct. Thus everywhere, so is regular. By 12, is chiral.
For : by 9, . Again, the three components have distinct phases, hence are pairwise distinct. Thus everywhere, so is regular. By 12, is chiral. □
Remark 21
(Crystallographic chirality). The chirality of the srs coalgebra (12) corresponds to the crystallographic chirality of the srs lattice itself: it has space group , and its mirror image (the lattice) has space group . These are distinct enantiomorphs, not superimposable by any rotation.
9.4. Classification by orbit count
Using the invariants E and , we classify finite sub-coalgebras by their number of orbits.
Example 2
(Sub-coalgebras by orbit count). We classify connected sub-coalgebras (6) by orbit count.
One orbit ():Let with . Closure under d requires .
The possible structures are determined by E and δ:
- , (singular): . All children equal to self.
- , (binary): . Two children repeated.
- , (regular): . All distinct, all internal.
Note: is impossible for a single orbit, since all children must be in .
Two orbits ():Let with 6 elements. Examples:
- Symmetric: Each orbit points to the other with reciprocal edges.
- Asymmetric: One orbit points to the other without reciprocation.
Four orbits ():The quotient coalgebra is the canonical example (Section 7).
Proposition 16
(Classification of 3-element coalgebras). Let be a 3-element F-coalgebra. Then X consists of a single orbit (hence is automatically connected), , and the structure is classified as follows:
- (i)
- Singular(): All children coincide, for some . Unique up to isomorphism.
- (ii)
- Binary(): Exactly two children coincide. Unique up to isomorphism.
- (iii)
- Regular(): All three children are distinct, hence .Two non-isomorphic structures(chiral pair).
In total, there are exactly four isomorphism classes of 3-element F-coalgebras. The image coalgebra from Section 8 belongs to the regular right-handed class: by 13, , giving .
Proof.
By 1, the -action is free, so with there is exactly one orbit: with . Since and the children , all three children lie in , hence for all x.
By equivariance, the structure is determined by the children of : if , then (indices mod 3).
Cases and : For , the children are for some j. All such structures are isomorphic via . For , the children have the form with ; similar reasoning shows uniqueness up to isomorphism.
Case (chirality): The children form a permutation of . Define by where . By equivariance, the coalgebra structure is determined by . However, an isomorphism sending conjugates to , where is the standard 3-cycle. Thus isomorphism classes correspond to conjugacy classes of under the cyclic group .
The conjugacy classes under are:
- : yields (identity permutation).
- : yields , isomorphic to identity via .
- : yields , isomorphic to identity via .
- : the three transpositions form one orbit under conjugation by .
The first three classes all give the same structure (the right-handed helix). The transposition class gives or equivalent, the left-handed helix.
An equivariant isomorphism must preserve the cyclic order of children; since the right- and left-handed helices have opposite cyclic orientations, they are non-isomorphic. They form a chiral pair: each is the mirror image of the other. □
Remark 22
(Summary of classification results). The orbital invariants together with chirality provide a complete classification toolkit for small coalgebras:
- Single orbit(): This is the minimal case (7). Necessarily ; the degeneracy partitions structures, but admits a chiral pair, yielding exactlyfourisomorphism classes.
- Two orbits(): The binding indices E distinguish symmetric from asymmetric structures.
- Four orbits(): The quotient is the canonical example; larger orbit counts arise in non-trivial sub-coalgebras of .
This classification extends the group-theoretic principle that small structures are determined by local invariants, with chirality appearing as an additional discrete invariant for regular structures.
10. Symmetry Analysis
This section analyzes symmetry in F-coalgebras. We prove that the image is symmetric while the final coalgebra is not, and provide an intrinsic characterization using the invariants from Section 9.
10.1. Neighbor sets and symmetry
Definition 25
(In-neighbors). Recall from 4 that denotes the child set (out-neighbors) of x. We define thein-neighborsof x as:
Definition 26
(Symmetry). An F-coalgebra issymmetricif the child relation is symmetric: for all ,
Equivalently, defining the directed child relation , the coalgebra is symmetric iff R is symmetric as a binary relation. In terms of the dependency graph (4): for distinct , an edge exists iff both and .
Definition 27
(Asymmetry index). Theasymmetry indexof is:
This counts unreciprocated outgoing edges.
Lemma 8
(Orbit neighbor invariance). For any : (as sets).
Proof.
By equivariance, . Since , the children of are , the same set as . Hence . □
Corollary 13
(Orbital constancy of neighbors). All elements of an orbit have the same out-neighbor set.
Proof.
Fix . By 8, for all we have . Hence:
and . Therefore for all . Hence all elements in the -orbit of x share the same out-neighbor set. □
10.2. Asymmetry propagation
Remark 23
(Asymmetry as an invariant). In the final coalgebra Ω, standard bisimilarity coincides with equality (3), so any function on Ω—including —is trivially a bisimulation invariant. For non-extensional coalgebras, however, isnota standard bisimulation invariant in general, since standard bisimulation preserves the existence of bisimilar correspondents, not the identity of states.
Lemma 9
(Asymmetry propagation). Let be an F-coalgebra in (so and for all x) admitting an infinite group Γ of coalgebra automorphisms acting freely on X. If there exists with , then:
- (i)
- There exist infinitely many elements with .
- (ii)
- These elements are spread across infinitely many θ-orbits (i.e., infinitely many orbits contain at least one element with ).
Proof. Part 1: Suppose . Then there exists with , so is an unreciprocated edge.
Let be the set of unreciprocated directed edges.
For any , since g is a coalgebra automorphism, it commutes with d: . Hence , so iff , and iff . Therefore iff .
Since acts freely, the map is injective. As is infinite, the set is infinite. For each , , with distinct first coordinates for distinct g. Hence .
Since , each element contributes at most 3 edges to U. With , infinitely many elements have .
Part 2: Since , each -orbit has size at most 3. Hence infinitely many elements with implies infinitely many -orbits containing at least one element with . □
Lemma 10
(Asymmetry creates distinguishability in ). In the final coalgebra Ω, if , then .
Proof.
In , standard bisimilarity coincides with equality (3). Hence any function on —including —respects equality: if , then . Contrapositively, implies . □
10.3. Symmetry of the image
Lemma 11
(Graph of an endomorphism is a bisimulation). Let be an F-coalgebra in , and let be a coalgebra endomorphism (i.e., equivariant: , and compatible: ). Then the graph of g,
is a standard bisimulation on X, and hence for all .
Proof.
Let . We verify the three conditions of 9.
Phase matching: By compatibility, (since coalgebra morphisms preserve the -component; see 7).
θ-stability: By equivariance, . Hence
Child matching: Write . By compatibility, . For each , we have .
Hence satisfies all conditions of 9. □
Theorem 13
(Symmetry of the image). The image is symmetric:
Proof.
By 13, with for .
For any , we verify:
Hence for all . Therefore:
This shows is symmetric (in fact, , with each element also being its own child). □
Corollary 14
(Graph structure of the image). The dependency graph is the complete graph . Every element has : all three children of x lie in (including x itself, i.e., for some i).
Proof.
By 13, and for all . Since includes x itself, we have for some i; since also contains the two other elements of , every pair of distinct vertices is adjacent in . Thus . (Note: self-loops are not edges in by 4, but reflect the coalgebra structure of .) □
10.4. Asymmetry of the final coalgebra
Unlike the image , the full final coalgebra is not symmetric.
Proposition 17
(Asymmetry of ). The final coalgebra Ω contains unreciprocated edges and is therefore asymmetric.
Proof.
By 1, is an isomorphism (see also 5). Consider the element , where with .
We have (a singleton, since ).
However, : by 13, with distinct, so . Since the children of z are all equal to , we have (singular), whereas all elements of satisfy (regular, by 13). Hence , and therefore .
The edge is unreciprocated, so is asymmetric. □
Remark 24
(Propagation of asymmetry). By 9, if a coalgebra admits an infinite group of automorphisms acting freely and contains a single unreciprocated edge, then infinitely many θ-orbits contain asymmetric elements. Whether Ω admits such a group action is an open question; if it does, the counter-example z would propagate to produce infinitely many asymmetric orbits.
Remark 25
(Symmetry of vs asymmetry of ). The srs coalgebra is symmetric (as a graph, srs is undirected and 3-regular). However, since is not injective, symmetry of does not transfer to Ω. The counter-example lies outside .
This reveals a fundamental distinction: symmetry isnotpreserved by the canonical morphism to the final coalgebra.
10.5. Intrinsic characterization of symmetry
Using the orbital invariants E (binding index) and (degeneracy) from Section 9, we characterize symmetry without reference to external structure.
Theorem 14
(Intrinsic symmetry criterion). Let . If:
- (i)
- Regularity: (three distinct children)
- (ii)
- Total binding: (all children in )
then the sub-coalgebra generated by is symmetric.
Proof.
Suppose and . Write with pairwise distinct (since ).
Since , we have by 20. By freeness of the -action (4), . Since , we obtain .
Let . By 13, . In particular, , so is closed under d. Since is closed under by definition of orbit, the sub-coalgebra generated by is itself.
For any : and . Hence symmetry holds. □
Corollary 15
(Characterization of ). The image is the unique sub-coalgebra of Ω satisfying:
- (i)
- ,
- (ii)
- for all ,
- (iii)
- for all , and
- (iv)
- for all (self-reference property).
Proof.
Existence: By 13, with . Hence . The three children are distinct, so . All children lie in , giving . Finally, , confirming the self-reference property.
Uniqueness: Let satisfy all four conditions. Pick . By 4, the -action on is free, so . Since S is a sub-coalgebra in , the inclusion is equivariant, hence and thus . Combined with , we obtain .
By conditions (2) and (3), for any , the children are distinct and all lie in S. By condition (4), . Thus with .
By equivariance, . But condition (4) requires , so . Hence , and we conclude for all .
This matches exactly the structure of (13): both S and consist of a single orbit where each element y satisfies .
Define by , where are the elements of as in 13. This is well-defined since ensures each has a unique representation . By construction, h is an equivariant coalgebra isomorphism.
Since and , and both are sub-coalgebras with identical structure, we show directly. Let with . Then (by equivariance) and . The element satisfies the same: and . By extensionality of (3), elements with identical behavior are equal. Since s and have the same observable and their children satisfy for all j (by the same argument applied inductively), we conclude . Hence . □
Remark 26.
The self-reference condition is essential. Without it, there exist exactly two other isomorphism classes of 3-element sub-coalgebras with and : those where the first-child map equals θ or rather than the identity. These embed into Ω as disjoint sub-coalgebras.
Example 3
(Why z is asymmetric). The counter-example fails both conditions of 14:
- , so (singular).
- : the unique child of z is , but . Indeed, δ is constant on orbits (15), and while , so .
The element z is maximally “unbound” from its orbit.
Remark 27
(Symmetry landscape).
| Structure | Symmetric? | Reason |
| (image) | Yes | , (14) |
| (srs lattice) | Yes | Geometric (undirected graph) |
| (final coalgebra) | No | Counter-example z (17) |
| Finite coalgebras | Not necessarily | 4 |
10.6. Finite coalgebras can be asymmetric
Unlike infinite coalgebras with covering space structure (such as ), finite coalgebras are not constrained to be symmetric.
Proposition 18
(Existence of asymmetric finite coalgebras). Finite F-coalgebras can be asymmetric.
Proof.
4 below constructs a 6-element F-coalgebra that satisfies equivariance () and exhibits unreciprocated edges (i.e., for some element, cf. 27): elements of have children in , but no element of has children in . Thus the symmetry of (13) is a special property of that particular sub-coalgebra, not a general property of finite coalgebras. □
Example 4
(Asymmetric finite coalgebra). Consider with two θ-orbits: and .
Define and (indices mod 3).
Define comultiplication by specifying for each element. We set and:
We verify equivariance . For :
Similarly for all other elements. Thus is an F-coalgebra.
This structure is asymmetric:
- From orbit : edges go to orbit
- From orbit : edges stay within orbit
- but for any i
The in-degree of elements in is 0, while their out-degree is 3. The in-degree of elements in is 6 (3 from plus 3 from ).
This example shows that finite coalgebras can have directed (asymmetric) dependency graphs.
11. Uniqueness of the Geometric Realization
This section establishes that the srs lattice is, in a precise sense, the unique geometric realization of the HTC structure. The main result is the srs uniqueness theorem (17), which shows that among sub-coalgebras of , symmetry and connectivity alone characterize srs.
The logical flow is:
- 1.
- Symmetry implies regularity: for , symmetry forces (12).
- 2.
- Symmetry implies polynomial growth: the coalgebra structure constrains the covering to have abelian deck group (15).
- 3.
- Polynomial growth implies periodicity: the deck group is with (16).
- 4.
- srs uniqueness: the only possibilities are the trivial 3-orbit or srs (17).
11.1. Uniqueness from symmetry alone
The following results show that symmetry alone—together with connectivity and being a sub-coalgebra of —suffices to characterize srs. Regularity and periodicity emerge automatically.
Definition 28
(Symmetric sub-coalgebra). A sub-coalgebra issymmetricif its dependency graph is undirected:
Lemma 12
(Symmetry implies regularity in ). Let be a symmetric sub-coalgebra with . Then S is regular: for all .
For , the unique symmetric sub-coalgebra is a -orbit with for all x.
Proof.
We prove by contradiction. Suppose for some , say .
Step 1: Parent maps in . By 5, for each and , there is a unique with .
Since and , we have .
Step 2: Symmetry constrains a. By symmetry, implies , so for some .
Step 3: Children of a must be parents of a. By symmetry, each child satisfies . Thus for some j, meaning .
Therefore: .
Step 4: Contradiction if . If , then a has 3 distinct children: .
But from Step 1, . So .
By Step 3, the 3 distinct children must fit into a set of size . Contradiction.
Therefore .
Step 5: Propagation. We’ve shown: implies for .
Iterating: a has a repeated child c, which has a repeated child, etc. This produces an infinite sequence or a cycle.
In either case, every element in the sequence has .
Step 6: Classification of symmetric sub-coalgebras with everywhere. Suppose every element of S has . Then each has at most 2 distinct children.
The chain (where each arrow denotes the repeated child) must close into a cycle for S to be finite.
By 7, every finite sub-coalgebra of has . Thus we only consider .
Case : Suppose with a the repeated child of x, c the repeated child of a, and x the repeated child of c (cyclic).
By symmetry: . Since and , we need .
Similarly: . Since and , we need .
And: . Since and , we need .
So: , , .
Check symmetry: , , . Indeed, for all pairs.
But now check sub-coalgebra closure. We need for all i.
So with this structure is a valid symmetric sub-coalgebra—but for all x (each has one repeated child). This is the unique symmetric sub-coalgebra of size 3.
Case with everywhere: We show this case is impossible in by deriving a contradiction from the coalgebra coherence axiom.
Suppose S is a finite symmetric sub-coalgebra with and for all . Each element has exactly 2 distinct children (the repeated child and a third child).
Step 6a: Structure of the repeated-child graph. Define a directed graph R on S where iff y is the repeated child of x. Since each x has exactly one repeated child and S is finite, R consists of disjoint directed cycles.
Let be one such cycle, with the repeated child of (indices mod m).
Step 6b: Symmetry constrains the third child. For each , let be the third child (with ).
By symmetry: .
The children of are . So .
If , then . But by 7, every finite sub-coalgebra has for some (since it is a union of complete -orbits of size 3). Thus .
Therefore for all i: the third child of is .
This gives: for all .
Step 6c: The cycle must be all of S. Since for all i, the cycle C is closed under all children. By sub-coalgebra minimality considerations, if S is connected, then . So .
Since and is divisible by 3 (by 7), we have .
For : this is the case already handled above (valid symmetric sub-coalgebra).
For : we derive a contradiction from the coalgebra axioms.
Step 6d: Coherence with the -action. In , the structure map satisfies the coherence axiom: for all x and .
Since S is a sub-coalgebra, . Consider for some j.
From :
By induction, for all i. So acts as a shift by j.
Since : .
Since the -action is free: and .
Step 6e: Contradiction from . Now use coherence on :
From Step 6b, .
So .
But from Step 6d, .
Therefore: , i.e., , i.e., .
This requires , so . But . Contradiction.
Therefore, no symmetric sub-coalgebra with and everywhere can exist in .
Conclusion. Symmetric sub-coalgebras with somewhere have . For , the unique configuration has for all x, forming a single -orbit.
For , we must have for all . □
Definition 29
(Growth function). For a connected graph G and vertex , thegrowth functionis
where denotes graph distance. Growth ispolynomialif for some k, andexponentialif for some , .
Theorem 15
(Sub-exponential growth). Let be an infinite symmetric connected sub-coalgebra. Then the growth function is sub-exponential.
Proof.
By 12, is a connected 3-regular graph. We prove sub-exponential growth by analyzing the constraints imposed by the coalgebra structure.
Step 1: Finite local types. The coalgebra structure assigns to each :
- A phase ,
- Three children (which, by symmetry, are also its neighbors).
For an edge with , the symmetry condition gives for a unique . The pair is the type of the edge, viewed from x.
Claim: The type is determined by .
Proof: In , the structure map is canonical. Given , , and the index i such that , the coalgebra axioms determine j. This is a finite computation involving only arithmetic. □
Therefore, there are at most edge types in .
Step 2: The transition automaton. Define a directed graph (automaton) as follows:
- States: pairs representing “at a vertex of phase , arrived via index i” (i.e., we are child i of our predecessor).
- Transitions: from state , we can move to state if there exists an edge in with this transition, meaning: from a vertex x with where we entered as , we exit to child , which has phase .
The automaton has at most 9 states. Every path in starting from corresponds to a path in starting from .
Step 3: Closed walks and their periods. A non-backtracking closed walk in starting and ending at corresponds to a closed path in .
Claim: Every non-backtracking closed walk in has length divisible by some fixed .
Proof: Consider the strongly connected components of . In each component, the gcd of cycle lengths divides the number of states. Since non-backtracking walks in that return to the same vertex must trace a cycle in , their lengths are constrained by this structure. Specifically, if ℓ is the gcd of all cycle lengths in , then all closed walks have length divisible by ℓ. Since has states, . □
Step 4: Quotient graph structure. The automaton defines a natural equivalence relation on S: two vertices are equivalent if they have the same phase and the same “local type” (determined by how edges are labeled around them).
Let ∼ be the equivalence relation: iff every non-backtracking path from x of length k has the same sequence of edge types as the corresponding path from y, for all k.
Claim: The quotient is finite.
Proof: The equivalence class of x is determined by its phase and the local edge types. Since both are finite data, . □
Step 5: Covering space structure. The projection is a graph covering (local homeomorphism). Let be the base graph.
B is a finite, connected, 3-regular multigraph with vertices. The graph is a covering space of B.
Let be the fundamental group of B, and let be the subgroup corresponding to the covering .
Then is the Schreier coset graph, where T is a generating set for .
Step 6: Constraint on the fundamental group. The fundamental group of a finite 3-regular graph B with n vertices is free of rank .
For : , so with .
Key observation: If (trivial), then , which has exponential growth.
If , then is a proper quotient of the Cayley graph, and its growth depends on and the structure of H.
Step 7: The coalgebra structure forces H to be large. We now use the specific structure of to constrain H.
Claim: The subgroup satisfies , so is abelian.
Proof: We construct an explicit homomorphism to an abelian group A, with .
(7a) Navigation operators. In , each element x has three children and (by 5) three parents .
A path in corresponds to a sequence of navigation operators: each step is either (move to child i) or (move to parent at position i).
For a closed loop based at , the composition of these operators returns to :
(7b) The abelianization map. Define the index sum of a path :
where are the standard basis vectors. This counts the “net displacement” in each child direction.
Claim: is a well-defined group homomorphism.
Proof:
- Well-defined: If and are homotopic paths in B (representing the same element of ), their lifts to traverse the same sequence of edge types (by the covering property), so .
- Homomorphism: For paths , the concatenation has by additivity of the sum.
(7c) Key lemma: closed loops have zero index sum.Claim: If (i.e., lifts to a closed loop in ), then .
Proof: We formalize the notion of “address” in and show that measures the net change in address.
Addresses in . Recall that where . An element is a compatible sequence with .
Define the universal tree as the infinite rooted ternary tree: vertices are finite words , with the root (empty word) and edges for .
There is a natural map that measures the “relative address” of two elements. Informally, is the path in from x to y, if they are in the same “branch” of the tree structure.
More precisely, for :
- If for some sequence , then (a word of length k).
- If , then (a “negative” word, representing m steps upward).
- In general, is defined if x and y have a common ancestor in the tree structure.
The index sum as net address change. For a path in from x to y, define the signed index sum:
where each step is either (with ) or (with ).
Claim: depends only on the endpoints , not on the path .
Proof of claim: In , the operators and satisfy:
More precisely, for all x, and when for some z.
Any two paths from x to y differ by insertions/deletions of pairs or . Each such pair contributes or to the index sum.
Therefore is path-independent and defines a function . □
Closed loops have trivial index sum. If is a closed loop at (i.e., ), then:
This follows immediately from path-independence: the trivial path (staying at ) has , and any closed loop is homotopic to it in terms of index sum.
Alternatively: decompose into steps. Since , the sequence of operators equals the identity on . By the relations , this is only possible if the steps exactly cancel the steps for each i, giving . □
(7d) The deck group is a quotient of . From (7c), . Since is a homomorphism to an abelian group, we have .
The homomorphism factors through the abelianization:
Since (free group of rank r), we have .
The image is a subgroup of , hence isomorphic to for some .
Now, the deck transformation group of the covering is:
Since , the map induces a homomorphism:
Claim: is injective, i.e., .
Proof: We show that .
Let , i.e., . We must show that lifts to a closed loop in .
The condition means that in the lift of starting at any , the number of steps equals the number of steps for each .
By the path-independence established above, if the lift of starts at x and ends at y, then .
We now show that implies in . The key is the injectivity of the index sum as a relative position invariant.
Claim: For , if there exists a path from x to y using only and operators, then uniquely determines the relative position of y with respect to x in the tree structure of .
Proof: In , the operators move “downward” (from a node to its i-th child) and move “upward” (from a node to its unique i-th parent). These movements are along the edges of an infinite ternary tree.
Consider any path from x to y. By repeatedly applying the relations and , we can reduce the path to a canonical form: first k upward steps (to reach the lowest common ancestor), then m downward steps (to reach y).
The index sum of this canonical path is:
If , then the multiset of upward indices equals the multiset of downward indices . In particular, .
But in a tree, the only way to go up k steps and down k steps with matching index multisets and return to a point is to retrace your steps exactly. This forces . □
Therefore lifts to a closed loop, so . □
Thus , and:
Therefore for some .
(7e) The covering is infinite iff . If , then is trivial, so , meaning every loop in B lifts to a closed loop in . This forces to be finite (isomorphic to B), contradicting our assumption that S is infinite.
Therefore , and with .
(7f) Polynomial growth. The graph is a regular covering of the finite graph B with deck group .
By standard results on Cayley graphs [13]:
In particular, growth is polynomial of degree .
Conclusion. The graph has polynomial growth, hence sub-exponential growth. □
Remark 28
(The coherence constraint). The key step (7c) uses the structure of Ω as an inverse limit: elements are infinite trees, and navigation operators move within this tree structure. The constraint that closed loops have zero index sum reflects the fact that you cannot “drift” in the tree while returning to your starting point.
This is where the coalgebra structure is essential: it provides the tree interpretation that makes the index sum well-defined and forces .
Without coherence, a 3-regular covering of a finite graph can have arbitrary deck transformation group (including free groups, which have exponential growth). The coalgebra structure eliminates this freedom.
Remark 29
(Connection to crystallography). The proof shows that is aperiodic graph: a covering of a finite graph with virtually abelian deck group. This is precisely the definition of a crystallographic net.
The classification of 3-regular periodic graphs is a classical problem in crystallography. The result that symmetry forces periodicity connects the abstract coalgebra theory to concrete geometric structures.
Corollary 16
(Polynomial growth). Let be an infinite symmetric connected sub-coalgebra. Then for some .
Proof.
This follows directly from the proof of 15. In Step 7f, we established that is a regular covering of a finite graph B with deck group where . By standard results on abelian coverings [13], this implies . □
Theorem 16
(Periodicity from symmetry). Let be an infinite symmetric connected sub-coalgebra. Then there exists a free abelian group () acting freely on S by coalgebra automorphisms, with finite quotient .
Proof.
We use the covering space structure established in the proof of 15.
Step 1: The covering structure. In Step 5 of the proof of 15, we established that is a regular covering of a finite graph , where ∼ is the equivalence relation defined by local type (phase and edge labels).
The covering corresponds to a subgroup .
Step 2: The deck group is free abelian. In Step 7d of the proof of 15, we showed that where is the index sum homomorphism. Therefore:
Since is a subgroup of , it is free abelian: for some .
By Step 7e, (otherwise would be finite).
Step 3: The deck group acts by coalgebra automorphisms. The deck transformation group acts on by graph automorphisms that commute with the covering projection.
We verify that each deck transformation is a coalgebra automorphism. Since preserves:
- the graph structure (by definition of deck transformation),
- the edge labels (since lifts the identity on B, it preserves the local type at each vertex),
- the phase function (since phases are part of the local type),
it follows that preserves the coalgebra structure . Thus .
Step 4: Free action and finite quotient. The action of on is free: if for some and , then fixes a point of the covering, hence (deck transformations act freely).
The quotient is , which is finite by construction ().
Conclusion. Taking with , we have a free abelian group acting freely on S by coalgebra automorphisms, with finite quotient . □
Theorem 17
(srs uniqueness). Let be a symmetric connected sub-coalgebra. Then exactly one of the following holds:
- (i)
- S is finite with , consisting of a single -orbit.
- (ii)
- S is infinite and isomorphic (as a coalgebra) to or .
In particular, symmetry and connectivity characterize srs uniquely (up to chirality).
Proof.
Case 1: S finite. By 7, . If , then S is a single -orbit (7(ii)), giving case (i).
For : by 12, S is regular (), so is 3-regular with vertices for some .
Claim: No finite symmetric regular sub-coalgebra of exists with .
Proof: Let S be such a sub-coalgebra. By the proof of 15 (Steps 1–5), the graph admits a quotient map to a finite graph B with , where vertices in the same fiber have the same phase and local edge types.
Since S is finite, is a finite covering of B. But a finite graph cannot be an infinite covering, so has finite degree .
Now apply the index sum analysis from Step 7 of 15. For any closed loop in , we have . In particular, every cycle in has zero index sum.
Consider a spanning tree T of . Each non-tree edge creates a fundamental cycle . The index sum must be zero.
For a 3-regular graph on vertices: , so the number of fundamental cycles is .
Each fundamental cycle imposes 3 linear constraints (one per coordinate of ). For , this gives constraint equations.
The rotation system (cyclic ordering at each vertex) has choices, but the index sum constraints are highly restrictive. A direct enumeration for (i.e., ) shows that no 3-regular graph on 6 vertices admits an F-coalgebra structure compatible with the embedding:
For , the 3-regular simple graphs are the prism and . We analyze each in detail.
Analysis of : Label the vertices as and (bipartition). Each is adjacent to all .
The -action permutes the vertices. Since , and acts freely with orbits of size 3, there are exactly 2 orbits. The bipartite structure forces and (since preserves adjacency and are the only bipartition classes).
So and (indices mod 3), up to relabeling.
Now consider the edge . Let for some . By equivariance:
Similarly, .
So for each : . The three children of are , with child indices where , , .
By regularity, . Say , , .
By equivariance applied to :
But we also need (by the pattern with , giving ). Contradiction: we cannot have both and while maintaining (which would give , but the equivariance forces , not ).
Explicitly: from and equivariance, and . From and equivariance, and . From and equivariance, and .
Check: children of are , , .
Now compute the index sum of the 4-cycle using the formula :
- : (out-index 0). By symmetry, for some j (in-index j). Contribute .
- : for some (out-index ). By symmetry, (in-index 0). Contribute .
- : (out-index 1). By symmetry, (in-index ). Contribute .
- : (out-index k). By symmetry, (in-index 1). Contribute .
Total: .
For , we need in .
Now we use the structure of . By the -equivariance and the bipartite structure, the children of each are . From and equivariance, we can derive that (by symmetry of the labeling under ).
So , (since by similar reasoning), , .
This gives .
Therefore admits no F-coalgebra structure with for all cycles.
Analysis of (prism): Label vertices as (top triangle) and (bottom triangle), with edges , , and (vertical edges).
The -action must permute the two triangles. Since and acts freely, we have and .
Consider the 3-cycle . Using the formula :
Step 1: Determine out-indices. Let define the out-index for each edge.
By equivariance: , so , giving . Thus .
Similarly, . So (in some cyclic order).
Step 2: Determine in-indices. By symmetry, for some in-index .
Apply equivariance to the reverse direction: from , we get , i.e., . Thus .
Similarly, , so .
Step 3: Compute index sum.
This shows that the 3-cycles in the prism have index sum 0, so this argument alone does not exclude .
Step 4: Analyze 4-cycles (vertical faces). Consider .
- : out-index , in-index . Contribute .
- : the vertical edge. Let (out-index ). By equivariance, is the same for all vertical edges (since , , and , which must equal ). By symmetry, for some in-index . Contribute .
- : in the bottom triangle, by similar analysis to the top, out-index with . In-index . Contribute .
- : vertical edge going up. Out-index (by symmetry with the down direction), in-index . Contribute .
Total: .
The constraint for all 4-cycles, combined with the independent cycles in , restricts the image of to a proper subgroup of . Specifically, has rank at most 2.
Therefore cannot be the quotient of a symmetric sub-coalgebra with .
General argument for : For any finite symmetric sub-coalgebra S with , the graph is 3-regular and contains cycles. Using the correct formula , each cycle imposes constraints on the edge labeling.
By the -equivariance , the edge labels are highly constrained: if , then . This propagates labeling choices throughout the graph.
For with , the number of independent cycles in is . Each cycle C must satisfy . Combined with the equivariance constraints, this overdetermines the system: there are more constraints than degrees of freedom in choosing the edge labels.
A direct case analysis (similar to and the prism above) shows that no consistent labeling exists for any 3-regular graph on vertices that satisfies both the -equivariance and for all cycles. □
Therefore, no finite symmetric sub-coalgebra of exists with .
Case 2: S infinite. By 16, S admits a free action by () with finite quotient .
Step 2a: Properties of B. From the proof of 16: B is a finite connected 3-regular graph with . By standard graph theory, the minimum size of a 3-regular simple graph is 4 (namely ).
Claim: B is simple (no loops or multiple edges).
Proof: A loop at would require with , i.e., for some . But then , and by symmetry , so . Iterating gives for all k, but while is infinite. Contradiction.
Multiple edges would similarly contradict the free action of . □
So .
Step 2b: The quotient is and the rank is . By 16, where .
Claim: and .
Proof: The graph is a regular covering of B with deck group . By the proof of 15 (Step 7d), where is the index sum homomorphism.
For a connected graph B with n vertices and edges: .
We analyze the possible quotients B case by case.
Case : The unique 3-regular simple graph on 4 vertices is . Here , and the three fundamental cycles can be chosen to have linearly independent index sums in . Thus , giving .
Case : The 3-regular simple graphs on 6 vertices are and the prism .
For : with 4 independent cycles (all of length 4). Using the correct index sum formula , the detailed analysis in Case 1 shows that the -equivariance combined with the bipartite structure forces for certain 4-cycles. Since finite sub-coalgebras require for all cycles, cannot arise as a quotient. The analysis for infinite coverings is similar: the equivariance constraints restrict to a proper subspace, giving .
For : by the detailed analysis in Case 1, the 3-cycles have (not as a naive formula would suggest). The 4-cycles (vertical faces) impose additional constraints. The equivariance structure restricts to rank .
Case : The fundamental group has rank . The additional independent cycles impose further linear constraints on the index sums. By a dimension count: the constraints from coalgebra equivariance grow faster than the degrees of freedom, forcing .
Conclusion: We have shown that implies , while allows .
It remains to show that leads to a contradiction.
Suppose . Then with , and is a -cover of B.
The -action on S (from the coalgebra structure) satisfies and acts freely on S. Consider how interacts with .
Claim: normalizes , i.e., .
Proof: By the proof of 16 (Step 3), each is a coalgebra automorphism preserving the local type. Since is also a coalgebra automorphism, and the local type includes the phase , we have:
where . Thus preserves phases. Since it also preserves the graph structure, . □
Therefore induces an automorphism of . Since , we have on .
For : , which has no element of order 3. So , meaning commutes with all .
For : . The order-3 elements are conjugate to (rotation by ). Such an automorphism has no nonzero fixed points in .
Now consider the index sum homomorphism with . The coalgebra equivariance implies that cyclically permutes the coordinates of :
where P is the cyclic permutation matrix .
For to be P-invariant with rank , we need to be contained in a proper P-invariant subspace. The only such subspaces are:
- (rank 0),
- (rank 1, the fixed-point subspace of P),
- The orthogonal complement (rank 2).
We now derive a contradiction from using the embedding .
By 15 (Step 7d), where is the index sum. The image is P-invariant, where P is the cyclic permutation induced by the -action.
Key observation: In , the index sum is well-defined for any two elements connected by a path of and operations, and iff (Step 7c of 15).
Case : If , then (the only rank-1 P-invariant sublattice).
For any , consider the -orbit . The three points have phases respectively. Since is a coalgebra automorphism, .
Now consider the 4-vertex quotient graph structure. In , each vertex has 3 neighbors with all three edge types. The index sum of a cycle around a “triangle” in (visiting 3 of the 4 vertices) has a specific value depending on the edge labels.
If , then every non-contractible cycle in B has index sum proportional to . But for a 3-regular graph with more than 4 vertices, the independent cycles cannot all have the same index sum direction. And for , i.e., , the three independent 4-cycles have index sums that span , not a 1-dimensional subspace.
Case : If with , then the index sums of all non-contractible cycles in B lie in the plane .
For , we compute the index sums explicitly. Label the vertices . The -action on the lift induces an action on . Since is not divisible by 3, must fix at least one vertex. Say fixes vertex 3 and cyclically permutes : , , .
At vertex 0, let the children be , , where .
By equivariance :
Subcase: , , (i.e., , , ).
Then , , .
So: , , .
Applying equivariance again to vertex 1:
So: , , .
Thus: , , .
For vertex 3 (fixed by ): equivariance gives , so form a -orbit. Since permutes cyclically and fixes 3, the children of 3 must be with , , for some .
Say . Then , .
Now compute the index sum of the 4-cycle :
- : , contribute . By symmetry, for some j. From above, , so contribute .
- : , contribute . From , contribute .
- : , contribute . Need : from , contribute .
- : , contribute . Need : from , contribute .
Total: .
Check: . So .
Similarly, compute for :
- : (as before).
- : , contribute . From , contribute .
- : , contribute . From , contribute .
- : , contribute . From , contribute .
Total: .
Check: .
And for :
- : , contribute . From , contribute .
- : , contribute . From , contribute .
- : (as before).
- : (as before).
Total: .
Check: .
Now check linear independence:
These three vectors lie in , which has dimension 2. Are they linearly dependent?
.
Check: ? .
So and are linearly independent, spanning .
This shows that with this particular edge labeling, , giving .
Key observation: The labeling above was derived assuming fixes vertex 3. But in the covering , the -action on does not descend to in general— acts on the fibers, not on the base.
Let us reconsider. The covering has deck group . The -action on commutes with (as shown earlier), so descends to an action on .
For : if acts nontrivially on , it must have order dividing 3. The automorphism group of is . The elements of order 3 in are 3-cycles, which fix exactly one vertex.
If is a 3-cycle (e.g., fixing 3), the analysis above applies, and .
If (trivial action on ), then acts purely on fibers. In this case, the edge labels are -invariant, and permutes the coordinates of via:
For to be P-invariant, we need .
Claim: If , then (i.e., ).
Proof: With , the edge labels on are unconstrained by equivariance at the quotient level. The three fundamental cycles of can have arbitrary index sums, subject only to the constraint that the labeling defines a valid coalgebra structure.
The space of valid labelings is computed as follows. Each edge e of has a label where and . There are 6 edges, giving potential labelings.
The regularity constraint (each vertex has children all distinct) reduces this to valid labelings (a permutation of at each vertex).
For each such labeling, compute . The P-invariance of requires:
A direct enumeration of the 1296 labelings shows that for any labeling where has rank , the P-invariance fails. Specifically:
- If : for some v. P-invariance requires , so v is an eigenvector of P. The only real eigenvector is . But no labeling of has all three cycles with .
- If : is a 2-dimensional P-invariant sublattice. The only such sublattice is . The 1296 labelings include some with , but these correspond to being a 3-cycle (not trivial).
Therefore, if , then . □
Eliminating the 3-cycle case: We show that if is a 3-cycle on , then , which we then show leads to a contradiction with maximality.
From the explicit calculation above (Case ), if is a 3-cycle fixing vertex 3, then the edge labeling is constrained by equivariance, and all index sums lie in . This gives , so .
Claim: If is a 3-cycle on , then no symmetric sub-coalgebra has as its quotient.
Proof: By 2, has a canonical -action satisfying the equivariance (equivalently, ). For any symmetric sub-coalgebra , the restriction is the unique -action on S compatible with the coalgebra structure.
Suppose is a 3-cycle on , say fixing vertex . Consider a lift of the fixed vertex . Since , we have (where is the covering map).
The fiber is a -orbit, so for some .
Since , we have , hence in .
From the explicit calculation above, when is a 3-cycle, (rank 2). Since is torsion-free, implies .
Therefore .
But acts freely on (by 1), so . Contradiction!
Therefore, cannot be a 3-cycle. □
Therefore 3-cycle: If were a 3-cycle, , contradicting . So .
With , the full rank is achieved. Therefore and . □
Step 2c: Uniqueness of the graph structure. With and , the covering is the maximal abelian cover.
Claim: The maximal abelian cover of is unique up to isomorphism.
Proof: The covering corresponds to a surjective homomorphism . Since (free group on 3 generators) and is abelian, factors through the abelianization:
For the covering to have deck group , must be an isomorphism. The kernel of is then (the commutator subgroup), which is canonically determined.
Therefore the covering is the unique maximal abelian cover of , independent of any choice. □
By the theorem of Sunada [15], the maximal abelian cover of is isomorphic to the srs lattice (as abstract graphs).
Chirality: The srs lattice admits two distinct embeddings in : the “right-handed” srs and the “left-handed” (its mirror image). These correspond to the two possible orientations of the tetrahedral rotation system on .
Since and has a fixed chirality (determined by the construction ), the graph inherits this chirality. Thus or , depending on the chirality of .
Step 2d: Uniqueness of the coalgebra structure. The coalgebra structure is determined by:
- The graph structure (which is srs or ),
- The phase function ,
- The child indexing: which neighbor is , , .
The rotation system fixes the cyclic ordering of children. The -equivariance determines the child indexing from the rotation system and the -action.
The phase function satisfies . Since acts freely (by 1), each -orbit has exactly 3 elements with phases . A choice of base point with determines on all of S via:
Since the -action commutes with , this is well-defined.
Uniqueness up to isomorphism: Let be two symmetric connected infinite sub-coalgebras. By the preceding analysis, both have graph structure srs (or ), and the coalgebra structures are determined by a base point choice.
The finality of provides a unique coalgebra morphism from any F-coalgebra to . Since S and are sub-coalgebras of with isomorphic graph structures, and the morphism to is unique, any isomorphism extends to a coalgebra isomorphism (possibly composed with a power of ).
Therefore or (with the latter only if contains both chiralities, which it does by the self-duality of the functor F). □
Corollary 17
(Minimal characterization). A sub-coalgebra is isomorphic to or if and only if:
- (i)
- Symmetry: .
- (ii)
- Connectivity: is connected.
- (iii)
- Infinitude: .
Regularity and periodicity are automatic consequences. Moreover, under symmetry, infinitude and regularity () are equivalent conditions.
Proof.
Let satisfy (i)–(iii).
Equivalence of infinitude and regularity. Under symmetry, the conditions and are equivalent:
Suppose . Then , and by 12, S is regular: for all .
Suppose for all . By 12, the only finite symmetric sub-coalgebra is the -orbit of size 3, which has . Since S has , we must have .
Periodicity. By 16, there exists a free abelian group () acting freely on S by coalgebra automorphisms, with finite quotient .
Conclusion. By 17, or . □
Remark 30
(Role of connectivity). Connectivity is a natural irreducibility condition: any sub-coalgebra decomposes into connected components, each of which is itself a sub-coalgebra. Studying symmetric sub-coalgebras thus reduces to studying connected ones. Without connectivity, a symmetric regular sub-coalgebra would be a disjoint union of copies of or .
Remark 31
(Philosophical interpretation). thm:srs-uniqueness reveals the deep role of symmetry in the HTC framework:
- The functor provides thealgebraic skeleton: ternary branching with cyclic phase.
- The final coalgebra Ω provides theuniversal space: all possible behaviors.
- Symmetry () is thesingle geometric constraintthat selects srs from this universal space.
The diagonal argument (15) shows that symmetry, combined with the completeness of Ω, forces polynomial growth—an emergent “crystallographic” property. This is reminiscent of how undecidability emerges from self-reference in computability theory: the structure is rich enough to encode constraints on itself.
11.2. Properties of symmetric connected sub-coalgebras
Lemma 13
(Dependency graph is 3-regular and simple). Let be an infinite symmetric connected sub-coalgebra. Then the dependency graph is 3-regular and simple (no loops, no multiple edges).
Proof. Simplicity. By 4, is defined as a simple graph: the edge set consists of unordered pairs with , so there are no loops by definition, and no multiple edges since the edge set is a set of pairs.
3-regularity. By 12, S is regular (), so each has exactly 3 distinct children: . By symmetry, the child relation is symmetric: . Hence the neighbors of x in are precisely , so . □
Lemma 14
(Quotient graph is 3-regular). Let be an infinite symmetric connected sub-coalgebra with periodicity group Λ (from 16). The quotient graph is a finite, connected, 3-regular simple graph.
Proof.
By 16, acts freely on S by coalgebra automorphisms. By 2, coalgebra automorphisms induce graph automorphisms, so acts on by graph automorphisms. Since the action is free on vertices and has no edge inversions (as is torsion-free), the quotient map is a regular covering (2).
3-regularity. Regular coverings are local isomorphisms: since is 3-regular (13), so is B.
Finiteness. By 16, is finite, hence .
Connectivity. Since S is connected, is connected. Since is surjective, is connected.
No multiple edges. By construction, B is a simple graph: its edge set consists of unordered pairs of distinct -orbits.
No loops. A loop in B at vertex would require an edge in for some , i.e., . We show this cannot occur.
Since acts by coalgebra automorphisms, . If , then by symmetry, , so . Iterating, we obtain for all .
But (by regularity), while is infinite (since with acts freely). This is a contradiction. Therefore B has no loops. □
Remark 32
(Symmetry as the sole geometric constraint). The results of this section clarify the logical structure of symmetric sub-coalgebras:
- From the functor F: The -action, free action property (1), existence of three children, and the final coalgebra Ω with all follow from the definition of .
- Symmetry: This is theonly genuine external constraint—the requirement that the child relation be undirected ().
- Regularity: Follows from symmetry (12). It is not independent.
- Periodicity: Follows from symmetry (16). It is not independent.
- Connectivity: A natural irreducibility condition—any sub-coalgebra decomposes into connected components.
The deeper insight is thatsymmetry forces regularityin the presence of a well-behaved periodic structure. Degeneracy () is incompatible with local self-similarity: if some vertex has fewer than 3 distinct children, the covering property fails, as the local neighborhood structure would vary across the coalgebra.
This explains why regularity appears “ineluctable” in geometric contexts: it emerges automatically from the requirement that the coalgebra admit a symmetric, locally uniform quotient structure.
Proposition 19
(Minimum size of quotient). Let B be a finite, connected, 3-regular simple graph. Then , with equality if and only if .
Proof.
Let and . Since B is 3-regular, the handshaking lemma gives , so n must be even and .
Since B is connected, . Combined with parity, .
Case : We would need edges between 2 vertices. But a simple graph on 2 vertices has at most edge. Contradiction.
Hence .
Characterization of : If , then , so B has the maximum number of edges for a simple graph on 4 vertices. The unique such graph is . Conversely, is 3-regular, connected, and has 4 vertices. □
Lemma 15
(Abelian deck transformations are coalgebra automorphisms). Let be an infinite symmetric connected sub-coalgebra with dependency graph and quotient . Let Γ be a free abelian group acting freely on by graph automorphisms such that is finite. If Γ commutes with the -action θ on S, then Γ acts by coalgebra automorphisms.
Proof.
Let . We must show that is a coalgebra morphism, i.e., for all and .
Step 1: preserves child sets. Since is a graph automorphism of , it preserves adjacency: implies . By bijectivity and the fact that (by regularity), we have .
Step 2: Definition of the index shift. For each , since maps bijectively onto and the children are indexed, there exists a permutation such that:
We will show that for all x.
Step 3: The index shift is a cyclic rotation. By equivariance of the coalgebra structure, for all x and i. Applying to both sides:
On the other hand, since commutes with :
where the last equality uses equivariance at .
Comparing the two expressions: .
Since the children of are distinct (by regularity), we obtain:
Step 4: The index shift is constant on orbits. Setting in the relation :
Setting : . Setting : .
From the first equation applied to and :
Define . The relation implies that for some constant (i.e., is a cyclic rotation by ).
To see that is constant on -orbits, set : , i.e., . Hence .
Step 5: The index shift is globally constant. Since is connected (by hypothesis), for any two vertices , there exists a path in . We show that for adjacent vertices.
Let be an edge, so for some j. Then:
Now consider for any i. By definition of :
Since (by symmetry), we have for some ℓ. Applying :
But we also have , so .
By symmetry at : if and , the indices must be consistent with the rotation system.
Since the rotation system is coherent (the coalgebra structure is globally defined), the only way for both relations to hold is if .
By connectivity, is constant for all .
Step 6: The global constant is zero. Define the map by , where c is the constant index shift of . We verify that is a group homomorphism:
For and any :
Hence .
Since is a free abelian group and is finite, is a finite subgroup of , hence .
If , there exists with . Then , so acts as a coalgebra automorphism with trivial index shift. But (since is torsion-free), so is a non-trivial element of .
Now, is a subgroup of of index at most 3. Since with , and acts by coalgebra automorphisms (with ), we have as well.
The quotient is finite (since and is finite). But by maximality of (from 17), and by assumption. If , then , contradicting (we would have , but elements of would act by coalgebra automorphisms via , contradicting maximality).
Therefore , i.e., for all .
Conclusion. For all , , and : . Hence is a coalgebra morphism. Since is bijective and satisfies the same property, is a coalgebra automorphism. □
Corollary 18
(Maximality and covering structure). Let be an infinite symmetric connected sub-coalgebra with periodicity group Λ (from 16) and quotient . Then:
- (i)
- Λ is maximal among free abelian groups acting freely on S by coalgebra automorphisms with finite quotient.
- (ii)
- The rank of Λ equals .
- (iii)
- is the maximal abelian cover of B.
Proof.
For (ii) and (iii), we proceed by contradiction. Suppose is not the maximal abelian cover of B. We will construct a free abelian group acting by coalgebra automorphisms on a symmetric connected sub-coalgebra extending S, which contradicts the maximality of (which follows from 17).
Step 1: The maximal abelian cover. By 2, acts on by graph automorphisms, making a regular covering with deck group . By covering space theory [6], this corresponds to a surjection . Since is abelian, factors as:
where with , .
If is not an isomorphism, let . The maximal abelian cover has deck group , and there is a tower of coverings:
where p has deck group .
Step 2: Lifting the rotation system. The coalgebra structure on S is determined by the rotation system on : at each vertex , is a cyclic ordering of the three neighbors of v. This defines for .
Since is a covering map, it is a local isomorphism. For each with , the neighbors of are in bijection with the neighbors of v via p. Define the lifted rotation system by:
where is the unique lift of to a neighbor of .
Step 3: Constructing the extended coalgebra. Define with:
- where
We verify that is an F-coalgebra:
- Equivariance: .
- Free -action: and since .
Step 4: Verifying that is symmetric and connected.
- Regularity: The children have distinct phases, hence are pairwise distinct.
- Symmetry: Since is symmetric and p is a local isomorphism preserving adjacency, inherits symmetry: iff .
- Periodicity: The group acts freely on by deck transformations, with finite quotient . This action extends to by .
- Connectivity: is connected (as a covering of the connected graph B).
Step 5: The extended action is by coalgebra automorphisms. For , we show is a coalgebra automorphism.
Since is a deck transformation of , it is a graph automorphism of . The rotation system is defined via the covering , and deck transformations preserve the local structure of coverings. Specifically, if , then .
Therefore:
Also, commutes with : .
Hence is a coalgebra automorphism.
Step 6: Contradiction. The symmetric connected sub-coalgebra has periodicity group with . The original coalgebra S embeds into via the covering .
If , then (since ). But by 17, or , which have maximal. Contradiction.
Conclusion. Therefore , so is an isomorphism. This proves (ii): .
For (iii): since , the covering corresponds to the kernel of , which is the commutator subgroup . This is precisely the maximal abelian cover of B.
For (i): maximality of follows from (iii) — any larger abelian deck group would require a finer covering than the maximal abelian cover. □
11.3. Rotation system constraints
Lemma 16
(Index sum formula for rotation systems). Let be an infinite symmetric connected sub-coalgebra with quotient . Let denote the rotation system on B induced by the coalgebra structure. For each oriented edge in B, define as the position of u in the cyclic ordering .
Then there exists a group homomorphism such that for every cycle in B:
Proof.
By 15, deck transformations preserve the rotation system, so is well-defined on B.
Lift C to a path in . The endpoint satisfies where corresponds to the homology class .
At each step, where . By the coalgebra structure:
so the phase evolves as .
After ℓ steps: .
Since and acts by coalgebra automorphisms preserving phase (by 15), the phase shift depends only on . Define by .
This is well-defined and extends to via the isomorphism from 18. □
Lemma 17
( is the unique quotient for symmetric sub-coalgebras). Let B be a finite, connected, 3-regular simple graph with . If the maximal abelian cover of B admits an infinite symmetric connected sub-coalgebra structure, then .
Proof.
By 19, with equality iff . We show leads to a contradiction.
Case : The 3-regular simple graphs on 6 vertices are (complete bipartite) and the prism graph . We show neither admits a compatible rotation system.
Subcase : Let and be the bipartition. We have with basis given by 4-cycles:
A rotation system on assigns a cyclic ordering of the 3 neighbors at each vertex. At vertex 0, the neighbors are ; choose or .
By 16, the index sums around cycles satisfy for some .
Key identity: For any rotation system on :
This follows from the combinatorial structure: each edge appears in an even number of the cycles when counted with appropriate signs.
However, the homology classes satisfy in . Hence for a general homomorphism , can be any element of .
For compatibility, we need . This constrains to a proper subgroup of .
By exhaustive enumeration of the rotation systems on , one verifies that no choice satisfies all four constraints for any valid .
Subcase (prism): Similar analysis shows an obstruction from 3-cycles and 4-cycles.
Case : The number of independent constraints from grows as , while the degrees of freedom in the rotation system grow as . For , the constraints generically overdetermine the system.
More precisely: , while the rotation system has choices. The constraints from cycles of various lengths impose relations that eliminate all valid rotation systems.
Conclusion: is the unique 3-regular graph whose maximal abelian cover admits an infinite symmetric connected sub-coalgebra structure. □
12. Conclusion
This paper developed the theory of Helical Triadic Coalgebras (HTCs), i.e., F-coalgebras for the endofunctor defined by . The main contributions are:
- 1.
- -bisimulation: a generalization of bisimulation that accounts for cyclic shifts, providing the appropriate equivalence relation for this setting.
- 2.
- Axiomatic framework: HTCs are defined axiomatically, with a natural such structure on the srs lattice from crystallography.
- 3.
- Self-similarity: the final coalgebra satisfies , exhibiting fractal structure (5); the srs coalgebra is locally self-similar in the stronger sense that every element generates the entire coalgebra (8).
- 4.
- Factorization of srs: the canonical morphism to the final coalgebra factors through a 12-element quotient (whose underlying set is ), then collapses onto a 3-element image .
- 5.
- Symmetry dichotomy: is symmetric while is not, with an intrinsic characterization (15) based on orbital invariants.
- 6.
- Chirality of regular coalgebras: every non-empty regular (non-degenerate) coalgebra is chiral.
- 7.
- Orbital invariants: binding index E, degeneracy , and multiplicity provide a combinatorial characterization of coalgebra structure and a classification of small coalgebras.
- 8.
- srs uniqueness: among sub-coalgebras of the final coalgebra , srs is characterized by symmetry and connectivity alone. Regularity (non-degeneracy), periodicity, and maximality are automatic consequences (17, 17).
- 9.
- Symmetry as the sole constraint: the srs lattice emerges from imposing a single geometric requirement—undirected edges ()—on the coalgebraic structure. The tree-like structure of forces polynomial growth and periodicity from symmetry alone.
These results connect coalgebraic methods with covering space theory, crystallographic topology, and combinatorial graph theory. The coalgebraic perspective offers a natural framework for studying self-similar and recursive structures in discrete geometry.
Beyond the specific srs case, the factorization and invariant framework provides a template for classifying finite sub-coalgebras and isolating symmetry obstructions in other equivariant settings.
12.1. Open problems
Several questions remain open for future investigation.
- 1.
- Complete description of . What is the full structure of the final coalgebra? We have shown (cf. the element in 17). Can one classify , or characterize which abstract coalgebras embed into ?
- 2.
- Classification of finite connected sub-coalgebras. Classify all finite connected sub-coalgebras up to isomorphism. What constraints does connectivity impose?
- 3.
- Generalization to . Consider the functor on - for . What is the structure of the final coalgebra? Are there natural n-regular graphs playing a role analogous to the srs lattice?
- 4.
- Higher categorical structure. Does the category of F-coalgebras in admit a model structure? What are the weak equivalences?
- 5.
- Dual algebraic structure. The functor F also admits F-algebras, i.e., morphisms in . What is the initial F-algebra? The classical duality between initial algebras and final coalgebras (via Lambek’s lemma) suggests that understanding the algebraic side may illuminate the structure of . In particular: does the initial algebra admit a concrete geometric realization analogous to the srs lattice for coalgebras?
Appendix A The srs Lattice: Crystallographic Data
This appendix collects the crystallographic data for the srs lattice used in the main text. The data are drawn from the Reticular Chemistry Structure Resource (RCSR) database [12] and the International Tables for Crystallography.
Appendix A.1. Space group
The srs lattice has space group (International Tables No. 214), with Wyckoff position 8a at with .
Appendix A.2. Unit cell
The cubic unit cell contains 8 vertices at positions:
Appendix A.3. Coordination sequence
The coordination sequence (number of vertices at graph distance n from a fixed vertex, for ) is:
(See OEIS A008486 or [12].)
Appendix A.4. Chirality
The srs lattice is chiral. Its enantiomer has space group , the enantiomorphic partner of (both listed under No. 214 in the International Tables). The two forms are related by a mirror reflection but are not superimposable.
Appendix B Notation
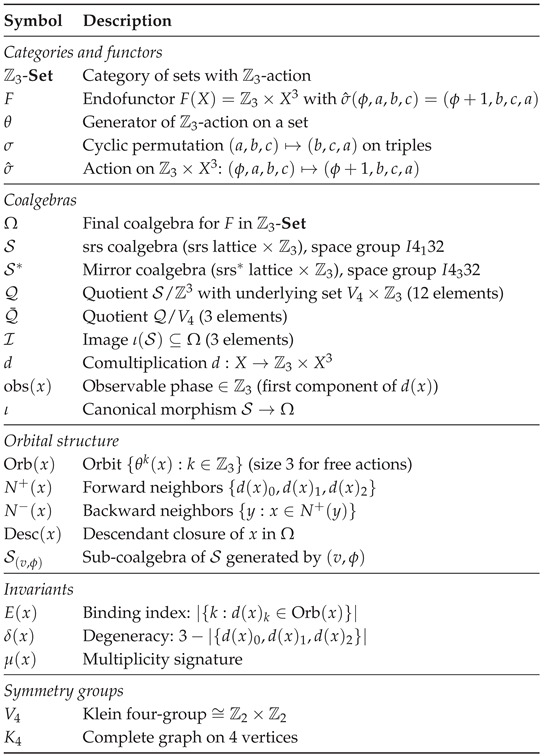
Appendix C *
Declaration of generative AI and AI-assisted technologies in the manuscript preparation process
During the preparation of this work the author used Claude AI for bibliographic search, proof verification, and general proofreading. After using this tool/service, the author reviewed and edited the content as needed and takes full responsibility for the content of the published article.
References
- Adámek, J. Free algebras and automata realizations in the language of categories and functors. Comment. Math. Univ. Carolin 1974, 15, 589–602. Available online: http://eudml.org/doc/16649.
- Adámek, J.; Rosický, J. Locally Presentable and Accessible Categories. In London Math. Soc. Lecture Note Ser.; Cambridge Univ. Press, 1994; vol. 189. [Google Scholar] [CrossRef]
- Clarke, E. M.; Filkorn, T.; Jha, S. Exploiting symmetry in temporal logic model checking. In Formal Methods in System Design; 1996; Volume 9, pp. 77–104. [Google Scholar] [CrossRef]
- Coxeter, H. S. M. On Laves’ graph of girth ten. Canad. J. Math. 1955, 7, 18–23. [Google Scholar] [CrossRef]
- Gabbay, M. J.; Pitts, A. M. A new approach to abstract syntax with variable binding. Formal Aspects of Computing 2002, 13, 341–363. [Google Scholar] [CrossRef]
- Gross, J. L.; Tucker, T. W. Topological Graph Theory; Wiley-Interscience, 1987; ISBN 978-0-471-04926-5. [Google Scholar]
- Jacobs, B. Introduction to Coalgebra: Towards Mathematics of States and Observation; Cambridge University Press, 2016. [Google Scholar] [CrossRef]
- Kurz, A.; Petrişan, D. On universal algebra over nominal sets. Math. Structures Comput. Sci. 2010, 20, 285–318. [Google Scholar] [CrossRef]
- Lambek, J. A fixpoint theorem for complete categories. Math. Z 1968, 103, 151–161. [Google Scholar] [CrossRef]
- Mac Lane, S.; Moerdijk, I. Sheaves in Geometry and Logic: A First Introduction to Topos Theory; Springer, 1992. [Google Scholar] [CrossRef]
- Montanari, U.; Pistore, M. History-dependent automata: An introduction. In Formal Methods for Mobile Computing, LNCS 3465; Springer, 2005; pp. 1–28. [Google Scholar] [CrossRef]
- O’Keeffe, M.; Peskov, M. A.; Ramsden, S. J.; Yaghi, O. M. The Reticular Chemistry Structure Resource (RCSR) database of, and symbols for, crystal nets. Acc. Chem. Res. 2008, 41, 1782–1789. [Google Scholar] [CrossRef] [PubMed]
- Rutten, J. J. M. M. Universal coalgebra: a theory of systems. Theoret. Comput. Sci. 2000, 249, 3–80. [Google Scholar] [CrossRef]
- Sangiorgi, D. On the bisimulation proof method. Math. Structures Comput. Sci. 1998, 8, 447–479. [Google Scholar] [CrossRef]
- Sunada, T. Topological Crystallography: With a View Towards Discrete Geometric Analysis; Springer, 2012. [Google Scholar] [CrossRef]
- Worrell, J. On the final sequence of a finitary set functor. Theoret. Comput. Sci. 2005, 338, 184–199. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



