Submitted:
05 December 2025
Posted:
09 December 2025
You are already at the latest version
Abstract
This paper presents the experimental validation of a computational kinematic model for a passive Stewart–Gough platform equipped with modified Cardan joints. The introduced joint geometry significantly increases structural stiffness but invalidates the standard spherical joint assumption commonly used in hexapod kinematic formulations. To address this, we develop an efficient numerical optimization based framework that solves both the direct and inverse kinematics without relying on simplified joint models. Furthermore, to enable autonomous and absolute pose measurement, each cylindrical leg joint of the platform is equipped with a LinACE™ absolute linear encoder. This sensor integration transforms the passive mechanism into an IoT-enabled reconfigurable fixture capable of internally sensing, tracking, and recalling its own configuration. The direct kinematics are computed iteratively using a homogeneous-transformation formulation and benchmarked against analytical models derived for ideal spherical joints. Experimental results demonstrate sub-millimeter accuracy in pose estimation, confirming the validity of the proposed kinematic model and highlighting the suitability of the sensor-equipped hexapod for industrial flexible fixturing applications.
Keywords:
1. Introduction
2. Hexapod Design Overview
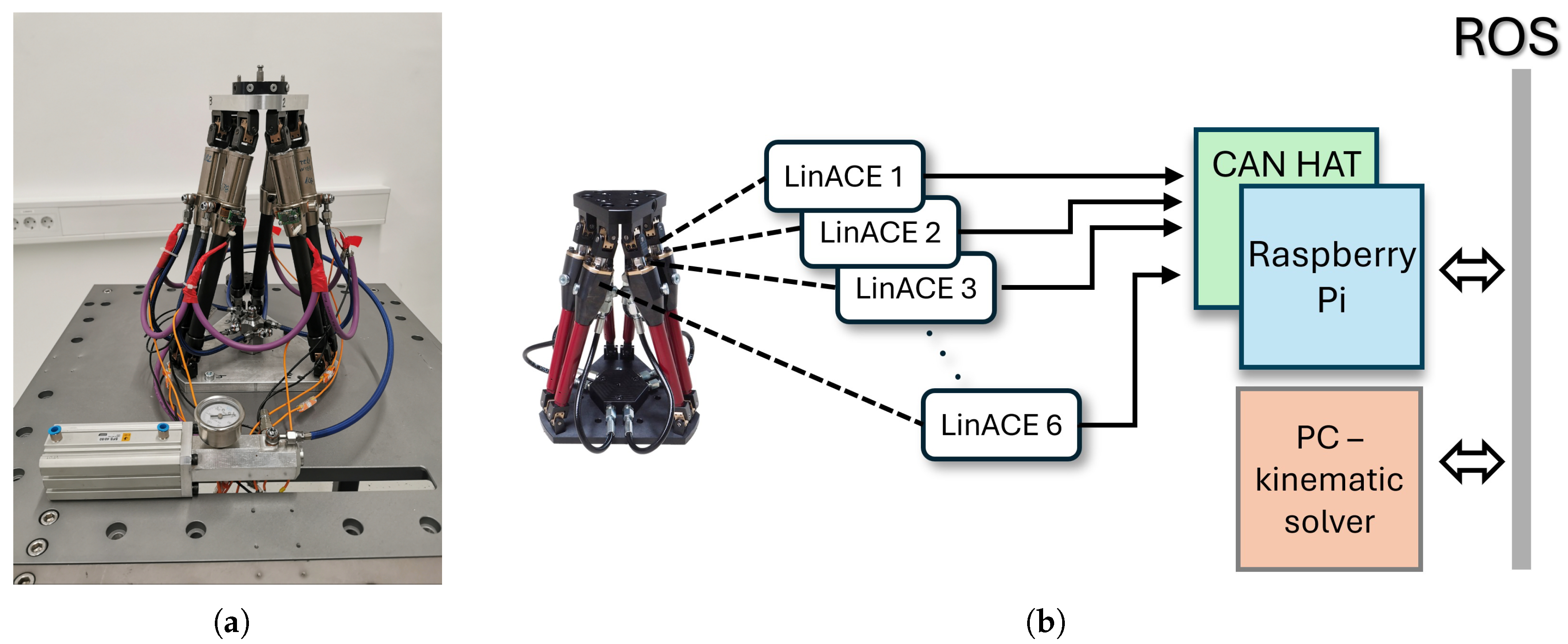
2.1. Encoder Integration
3. Direct and Inverse Kinematics of Parallel Mechanisms
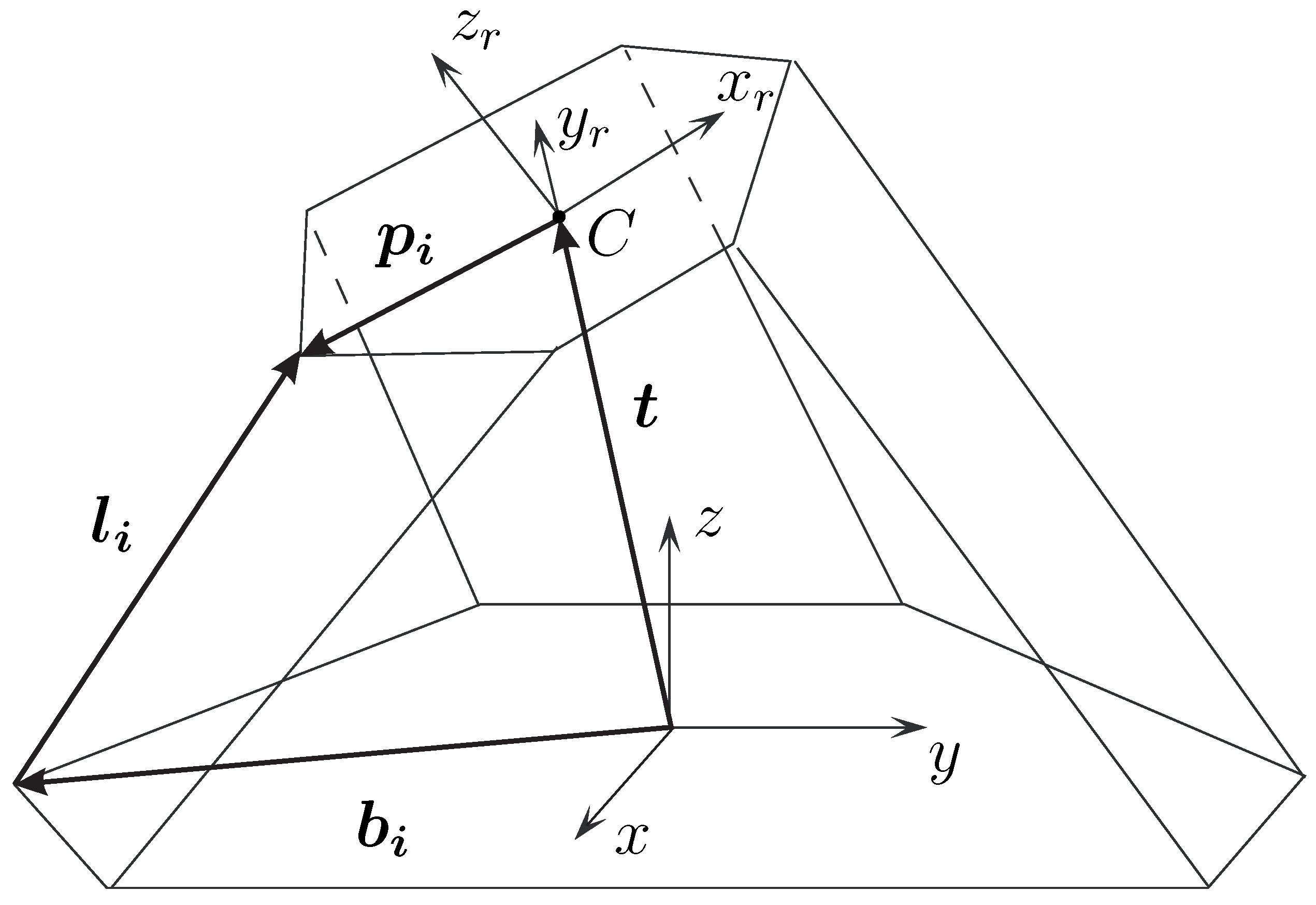
4. Kinematics of Stewart–Gough Platform with Preloaded Cardan Joints
4.1. Direct Kinematics
4.2. Inverse Kinematics
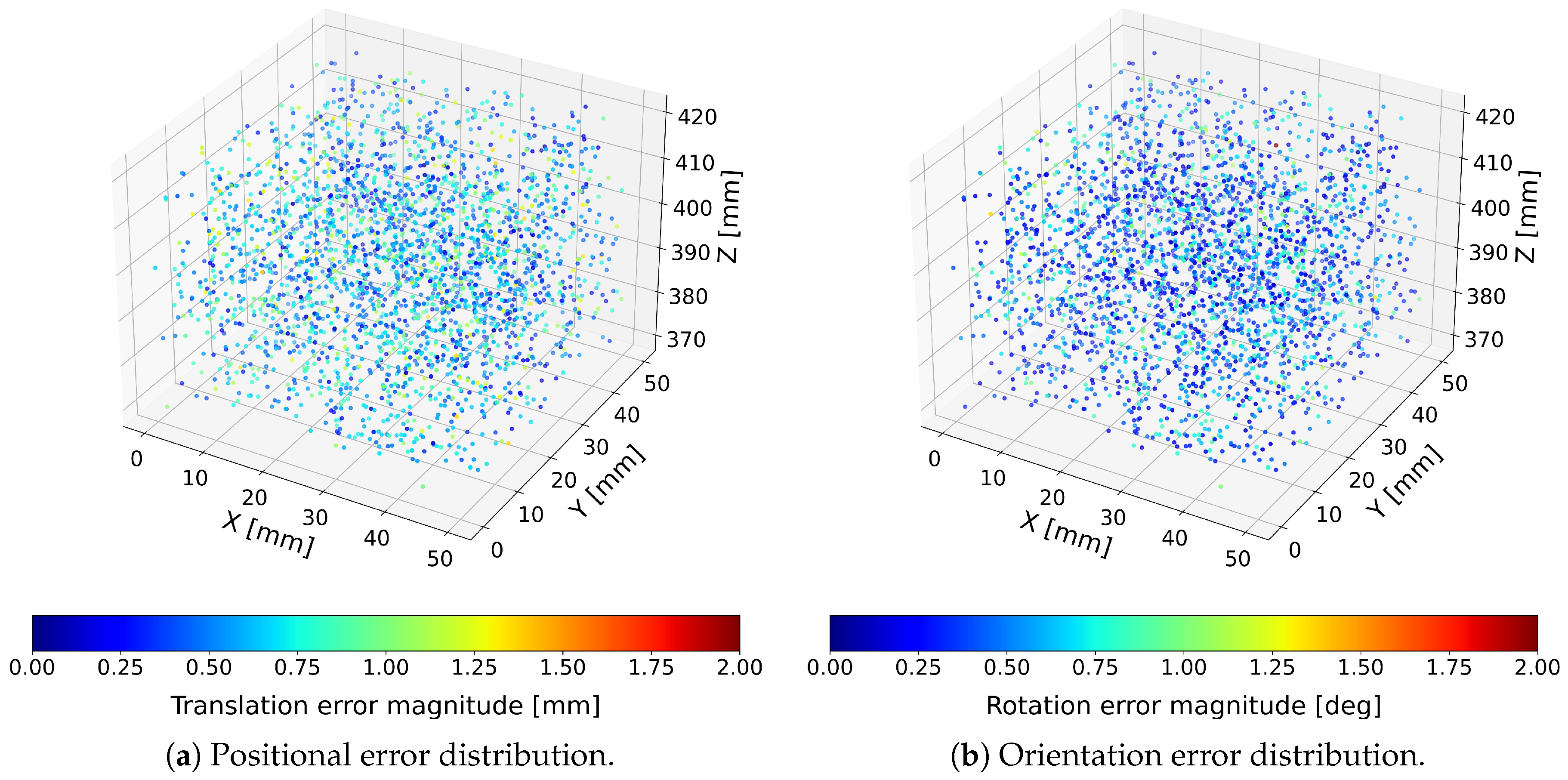
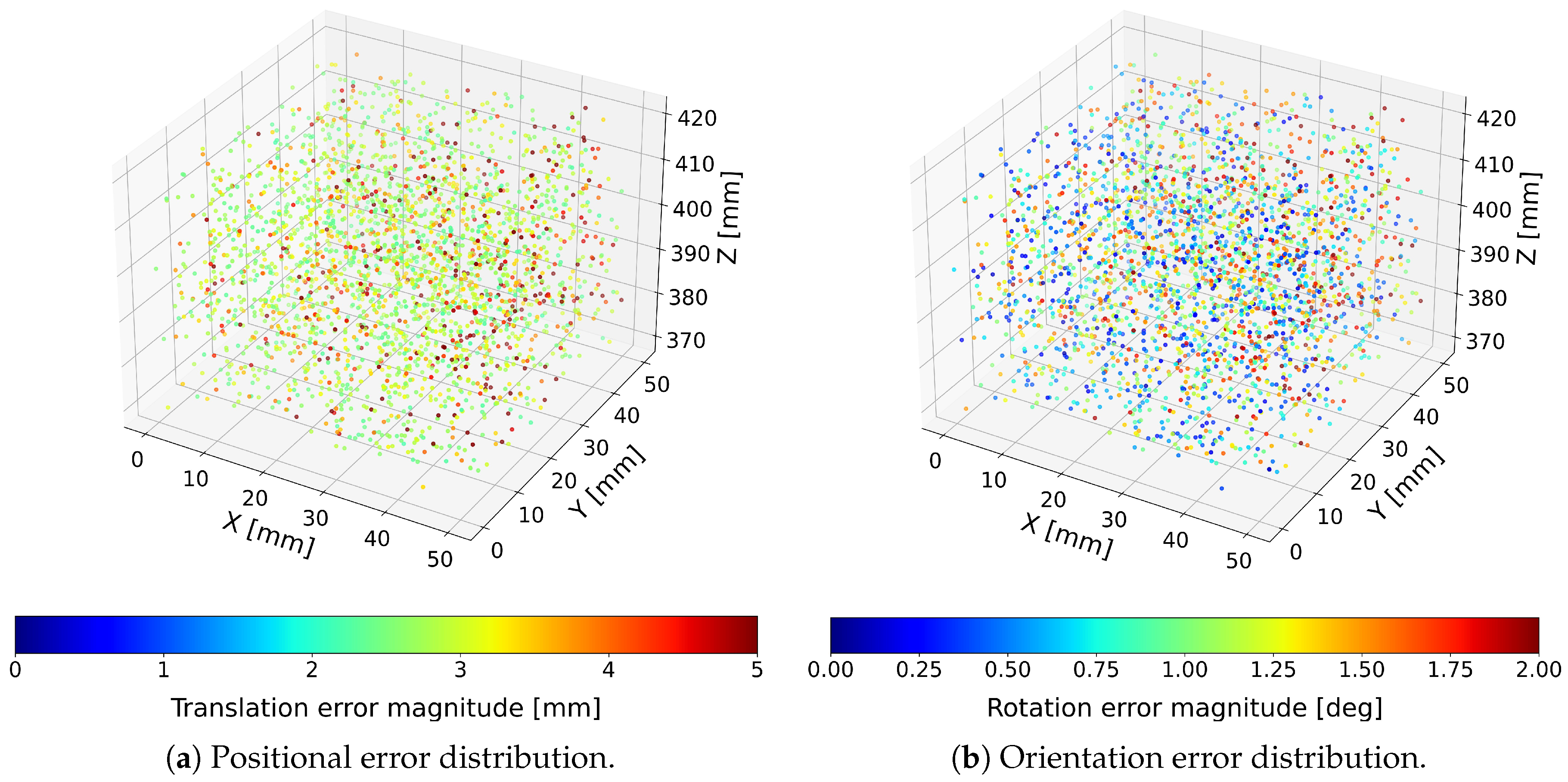
5. Experimental Validation
5.1. Experimental Setup
5.2. Procedure
6. Conclusion
Conflicts of Interest
References
- Koren, Y.; Shpitalni, M. Design of reconfigurable manufacturing systems. Journal of Manufacturing Systems 2010, 29, 130–141. [Google Scholar] [CrossRef]
- Gameros, A.; Lowth, S.; Axinte, D.; Nagy-Sochacki, A.; Craig, O.; Siller, H.R. State-of-the-art in fixture systems for the manufacture and assembly of rigid components: A review. International Journal of Machine Tools and Manufacture 2017, 123, 1–21. [Google Scholar] [CrossRef]
- Gough, V.E.; Whitehall, S.G. Universal Tyre Test Machine. In Proceedings of the Proceedings of the 9th International Technical Congress FISITA, 1962, pp. 117–137.
- Stewart, D. A Platform with Six Degrees of Freedom. Proceedings of the Institution of Mechanical Engineers 1965, 180, 371–386. [Google Scholar] [CrossRef]
- Dasgupta, B.; Mruthyunjaya, T.S. The Stewart Platform Manipulator: A Review. Mechanism and Machine Theory 2000, 35, 15–40. [Google Scholar] [CrossRef]
- Silva, D.; Garrido, J.; Riveiro, E. Stewart Platform Motion Control Automation with Industrial Resources to Perform Cycloidal and Oceanic Wave Trajectories. Machines 2022, 10, 711. [Google Scholar] [CrossRef]
- Engblom, C. Evaluation of Galil DMC-4080 as a Controller of Stewart Platform. PhD thesis, Lund University, Lund, Sweden, 2014. Master’s thesis, ISRN LUTFD2/TFRT–5946–SE. [Google Scholar]
- Lim, S.J.; et al. Modeling and Simulation of a Stewart-Platform Type Parallel Structure Robot. In Proceedings of the NASA Conference on Space Telerobotics, Pasadena, CA, USA, 1989. [Google Scholar]
- Ono, K.; coauthors. Analysis and Control of a Stewart Platform as Base Motion Compensators. Nonlinear Dynamics 2022, 110, 2283–2304.
- Kovač, I.; Bem, M.; Gašpar, T.; Bevec, R.; Ude, A. Robot Aided Reconfiguration Concept in Assembly. In Proceedings of the Procedia Manufacturing, 2019. [Google Scholar]
- Zhuang, H.; Roth, Z.S. Method for Kinematic Calibration of Stewart Platforms. Journal of Robotic Systems 1993, 10, 391–405. [Google Scholar] [CrossRef]
- Karmakar, S.; Turner, C.J. A Literature Review on Stewart–Gough Platform Calibrations. Journal of Mechanical Design 2024, 146, 1–27. [Google Scholar] [CrossRef]
- Husty, M.; Pernkopf, F. Model of a U-Joint with skew axes. In Proceedings of the Proceedings of the 11th World Congress in Mechanics and Machine Science, Tianjin, China, 2004. [Google Scholar]
- Kovac, I. Cardan Joint. WO 2018/197439 A1, 2018. PCT/EP2018/060387, priority GB 201706520 (25 April 2017).
- Vrhovec, M. Self-Locking Fluidic Clamping Device. US US20230220856A1, jul 2023. Published patent application.
- Dallej, T.; Nubiola, A.; Renaud, M.; et al. Kinematic Calibration of a Gough–Stewart Platform Using an Omnidirectional Camera. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2006; pp. 2604–2609. [Google Scholar] [CrossRef]
- Fu, L.; Yang, M.; Liu, Z.; Tao, M.; Cai, C.; Huang, H. Stereo Vision-based Kinematic Calibration Method for the Stewart Platforms. Optics Express 2022, 30, 47059–47069. [Google Scholar] [CrossRef] [PubMed]
- Majarena, A.C.; Santolaria, J.; Samper, D.; Aguilar, J.J. An Overview of Kinematic and Calibration Models Using Internal/External Sensors or Constraints to Improve the Behavior of Spatial Parallel Mechanisms. Sensors 2010, 10, 10256–10297. [Google Scholar] [CrossRef] [PubMed]
- Koubaa, A. Robot Operating System (ROS): The Complete Reference (Volume 3), 1st ed.; Springer Publishing Company, Incorporated, 2018. [Google Scholar]
- Lenarčič, J.; Bajd, T.; Stanišić, M.M. Robot Mechanisms; Springer Science+Business Media: Dordrecht, 2013. [Google Scholar]
- Nocedal, J.; Wright, S.J. Numerical Optimization, 2 ed.; Springer: New York, NY, USA, 2006. [Google Scholar] [CrossRef]
- Universal Robots A/S. UR10e Technical Specifications. Product datasheet, 2023. Available online: https://www.universal-robots.com/products/UR10e (accessed on 25 Nov 2025).
- NaturalPoint, Inc. PrimeX 22 Motion Capture Camera. Product page, 2023. Available online: https://optitrack.com/cameras/primex-22/ (accessed on 25 Nov 2025).


| Metric | Optimized Cardan-joint-aware model |
Standard Stewart–Gough model |
|---|---|---|
| Mean translation error [mm] | 0.6205 | 3.1684 |
| Std. dev. translation error [mm] | 0.2609 | 0.9094 |
| Mean rotation error [deg] | 0.4657 | 1.0037 |
| Std. dev. rotation error [deg] | 0.2417 | 0.5117 |
| Paired t-test (translation) | ||
| Paired t-test (rotation) | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



